1. Introduction
City mobility is changing and new urban planning is promoting environments that favor walking and access to basic public services. The analysis of pedestrian movement in urban environments has attracted the attention of the scientific community in recent years. Having environments that favor walking for citizens implies a reduction in the use of private vehicles, with the consequent positive impact on reducing greenhouse gas emissions, improving air quality and reducing environmental pollution. In addition, there are numerous studies evidencing the human health benefits associated with walking as a physical activity [
1,
2,
3,
4], enhanced by the increase in natural spaces in cities, to the detriment of spaces dedicated to private vehicles. However, identifying the most efficient pedestrian transit zones in terms of comfort and safety is not easy, because it requires precise knowledge of the geometry of multiple roadway elements, such as sidewalks, pavement, pedestrian crossings, curbs, slopes, stairs, trees, etc. Consideration must be given to the need to guarantee pedestrian itineraries for the autonomous transit of people with different mobility circumstances. For this purpose, it is essential to know the geometric conditions of the routes in plan and elevation, considering, in a singular way, crossings, changes in direction, slopes, gradients, urban elements and furniture in the spaces of displacement, paved surface, signaling, etc. Knowing the quality of the dimensions and state of conservation of sidewalks for these pedestrian routes can be very useful for public space managers, but it requires exhaustive information on the characteristics of roads in urban areas.
LiDAR (Light Detection And Ranging) scanning, both with airborne and terrestrial sensors, allows one to characterize the shape of an object or terrain by measuring the time delay between the emission of a laser pulse and the detection of its reflected signal on the measured element, achieving representations with high density of three-dimensional points [
5] with sub-meter accuracy, reaching sub-center accuracy in some sensors. The great advantage of LiDAR, compared to conventional image sensors, is the acquisition of high-resolution three-dimensional information, which allows one to extract very accurately the dimensions of objects and structures of interest, as well as identifying anomalies and defects. Moreover, they are active sensors insensitive to ambient light, which makes them a highly reliable source of information, with low noise levels compared to other technologies. This circumstance makes LiDAR a technology of great interest for characterizing the geometry of many territorial and urban elements.
LiDAR technology has proven its usefulness in multiple fields, such as architecture, heritage and environment, among others (Refs. [
6,
7,
8,
9,
10]), thanks to its great capacity to acquire massive data with geometric and radiometric information simultaneously. However, this productivity in the acquisition contrasts with the difficulty of its processing, since it requires extensive technical knowledge and a high computational cost. For this reason, more and more research has focused on developing efficient algorithms to interpret LiDAR data. The number of studies related to point-cloud processing and process automation for element identification in road infrastructures has increased significantly through the use of mobile LiDAR systems (MLSs), in which the LiDAR sensor is installed on a vehicle and acquires data while moving [
11]. MLS allows data to be captured from close distances, providing points with small footprint size and high accuracy. The MLS has a navigation system with a GNSS (Global Navigation Satellite System) receiver and an Inertial Measurement Unit (IMU) that allows the position of the sensor, its direction and orientation to be known at every moment. Thanks to this, the MLS manages to capture a three-dimensional and georeferenced point cloud that accurately characterizes the geometric configuration of transport infrastructures with longitudinal routes over the territory (streets, roads, highways, highways, railways, etc.) [
11,
12,
13].
Some studies have analyzed roads in rural areas, such as [
14,
15,
16] or [
17], which developed an effective method to generate a Digital Terrain Model (DTM) with high spatial resolution (0.25 × 0.25 m). Nevertheless, most research has been focused on the study of roads in urban areas, since the great disparity of elements present on the streets (curbs, vertical and horizontal signs, manholes, light poles, road pavement cracks, urban furniture, vehicles, etc.) makes the automation of any point-cloud segmentation process a difficult task. Having an accurate 3D model of the road surface, as well as an effective method to identify different road elements, is useful for maintenance studies and inventory of urban furniture and is essential for urban mobility analyses.
In the reviewed literature, some works focused on the determination of the road surface were found [
18,
19,
20,
21,
22]. Among them, it is worth mentioning Gérezo and Antunes’ [
23], in which a two-phased DTM was generated, first by identifying the terrain points and simplifying the point cloud and, later, by obtaining the DTM by means of the Delaunay triangulation on the terrain identified points. The authors of [
24] proposed to align all the scan strips, identify the terrain points by applying the filtering method designed by [
25] for Airborne Laser Scanner (ALS) data and generated a DTM. To improve its precision in areas without data, they proposed to merge their DTM with others of lower spatial resolution which were obtained using an ALS. Hervieu and Soheilian [
26] proposed a method in which the edges of the road are identified to establish a geometric reference and subsequently reconstructing the surface. Guan et al. [
27] developed an algorithm to segment the points of the road, grouping them into profiles according to the trajectory of the vehicle and generating a DTM with them afterwards.
On the other hand, certain articles have studied methods to efficiently segment different road elements that allow a more precise knowledge of the environment to be obtained. Some focus on the extraction of road markings [
28,
29,
30,
31,
32,
33], others on curbs [
34,
35,
36], traffic signs [
37,
38,
39,
40], or on the determination of road cracks [
41,
42], among others.
In this context, research studies such as [
43] stand out, in which an algorithm based on geometry and topology was proposed to classify elements of urban land (roads, pavement, treads, risers and curbs) that have subsequently been used as initial parameters in pedestrian accessibility studies [
44].
The aforementioned research papers show that, among the scientific community, there is an interest in developing algorithms that automate the process of creating accurate 3D models based on point clouds acquired with MLSs in urban roads. However, we did not find, in the reviewed literature, studies that focus on the characterization of sidewalk metrics, which we consider fundamental in studies of pedestrian accessibility. Certain works focused on the detection of roadside trees, either by MLS point-cloud segmentation methods [
45,
46] or by using deep learning techniques [
47,
48]. Others, such as [
43], proposed an algorithm based on geometry and topology to classify some urban elements (roads, pavement, treads, risers and curbs) that have subsequently been used as initial parameters of an accessibility study [
44], but pedestrian accessibility needs a more precise characterization of sidewalks. It is necessary to detect other types of obstacles, such as benches, signs, streetlights, etc., as well as characterizing the pedestrian spaces knowing, with precision, width, slope, free spaces for pedestrians and roughness of the ground to identify, for example, tiles in bad condition, etc.; all this information was collected in the 3D model that we generated.
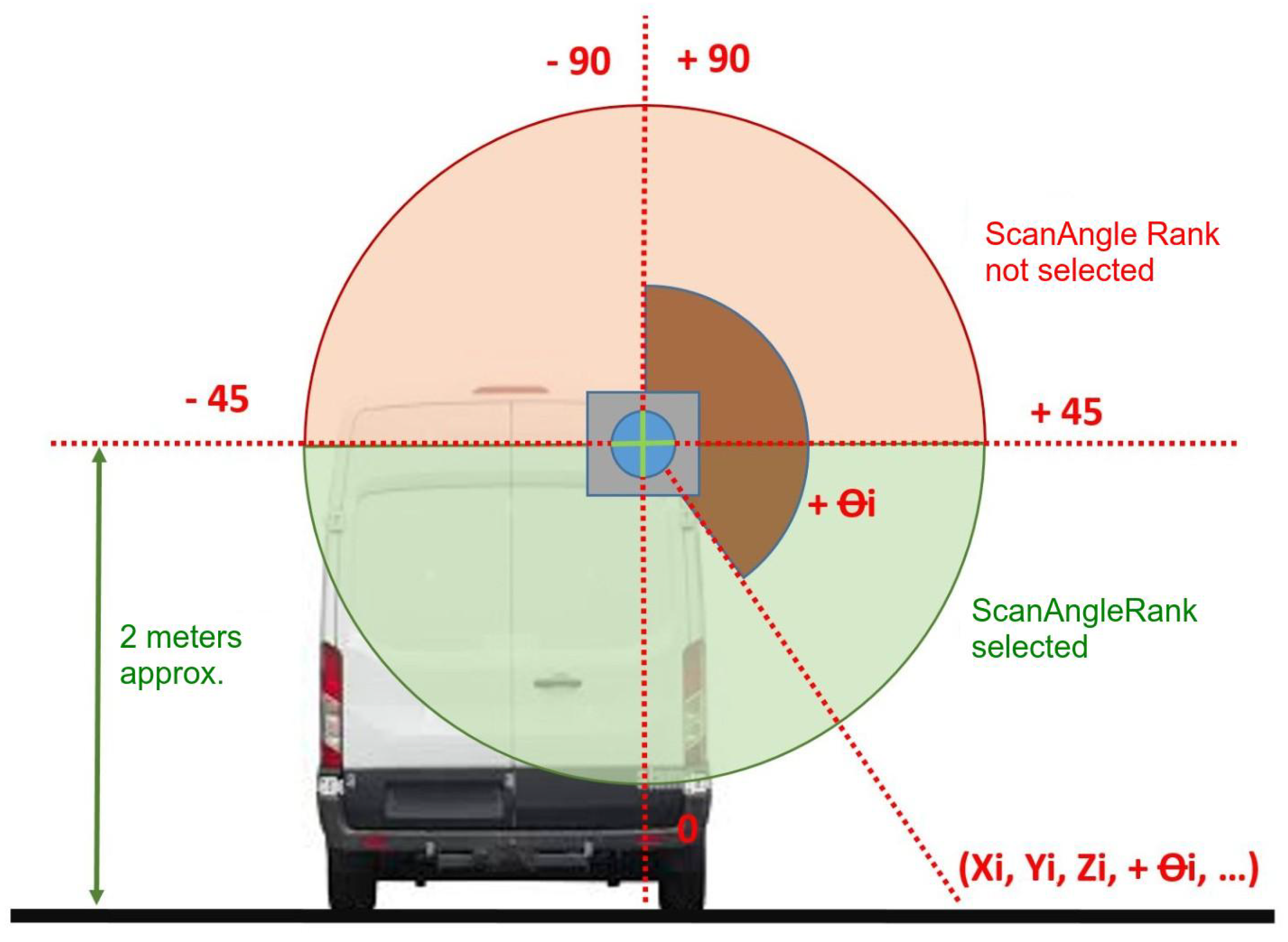
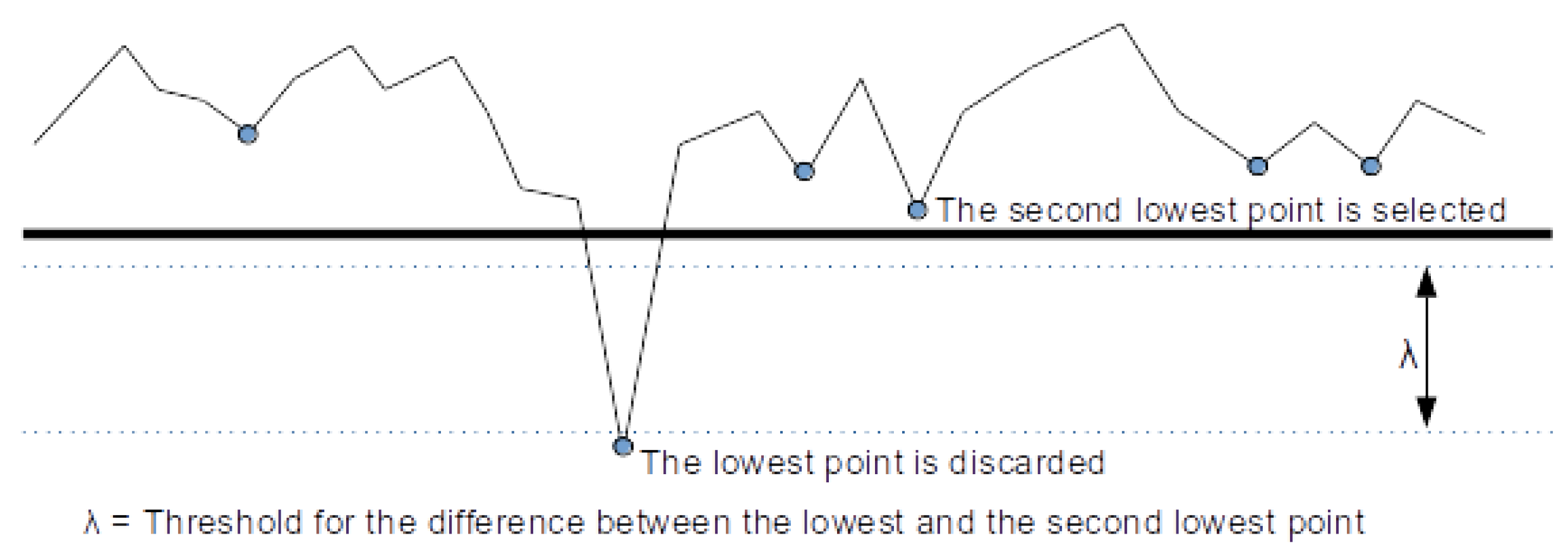
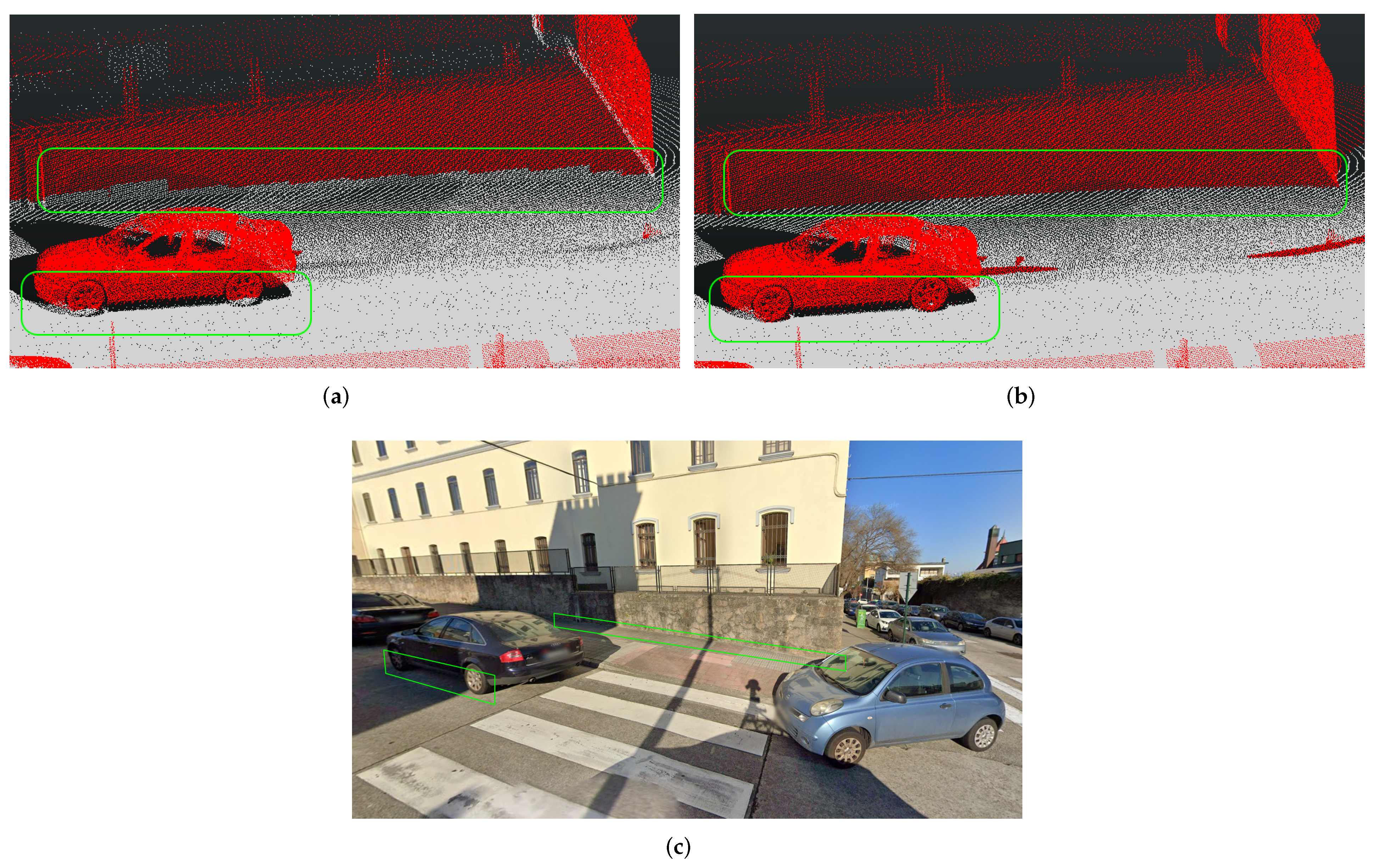
In addition, the automatic processing of MLS point clouds entails the solution of certain common problems that have not been accurately solved yet and of which we highlight two. The first one is the existence of obstacles in the road, mainly caused by vehicles or urban furniture that prevent the laser from acquiring data on the back, generating obstructions and creating areas without information in the point cloud. The second problem is due to the echoes produced by the laser pulse when it encounters glass surfaces (vehicles, windows and shop windows, among others) or vegetation, which cause double measurements of the points and must be eliminated, since they make it difficult to segment the cloud.
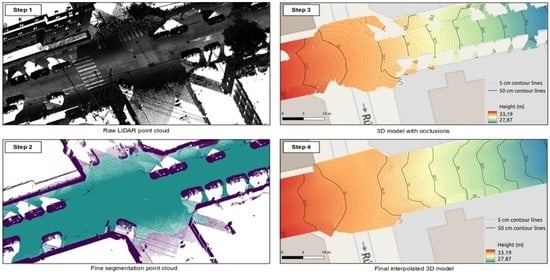
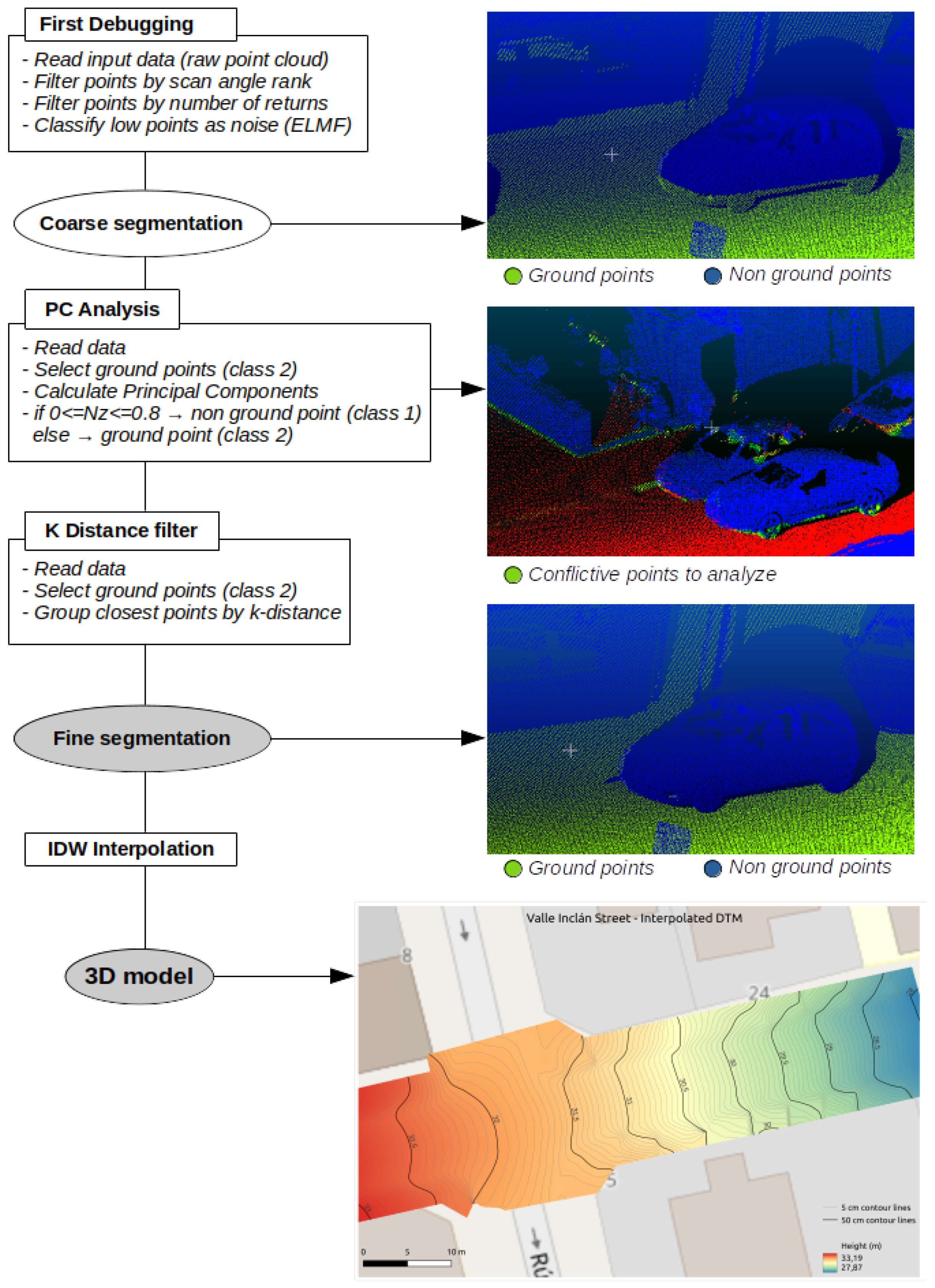
This paper proposes a method that made it possible to generate a 3D model of the urban road automatically, discriminating the points belonging to the terrain from the rest of the obstacles and simultaneously solving the above three problems. The algorithm works directly on the raw point cloud, using the Point Data Abstraction Library (PDAL). First, it removes the echoes, then it segments the cloud into terrain points and no terrain points; it determines the location of all obstacles, interpolates over the obstructed areas and, finally, generates a complete 3D model with great precision and spatial resolution. This model is essential in the latest pedestrian accessibility studies, as has already been demonstrated in the
Big-Geomove project. In this project, we worked on the integration of multiple data sources for the parameterization of road characteristics in urban environments near schools. In particular, we worked with massive data sources for the characterization of roads, such as LiDAR point clouds obtained by mobile scanning devices. This information was complemented with geolocalized information provided by the students of the schools through participatory processes. With all the information, pedestrian safety indicators were elaborated to zone each road space according to its validity as a pedestrian travel zone. Conditional cumulative cost surface techniques were also applied to calculate optimal pedestrian routes in urban areas based on the conditioning factors of the zoning defined by the pedestrian safety indicators. However, for this, it was essential to model, from the three-dimensional LIDAR point cloud, a 3D surface of the space available for pedestrian transit. This methodology for obtaining urban road 3D models for pedestrian studies from LiDAR data is the process described in this article. The developed algorithms and LiDAR data used in this project are freely licensed and available for use in further research, as mentioned in this text.
In
Section 2, the study area, the specifications of the MLS equipment used, the characteristics of the acquired point cloud and the details of the developed algorithm are exposed.
Section 3 describes the obtained results, in areas with a high density of points as well as in regions with no data. In
Section 4, the results are discussed and, in
Section 5, the main conclusions of the paper are drawn.
4. Discussion
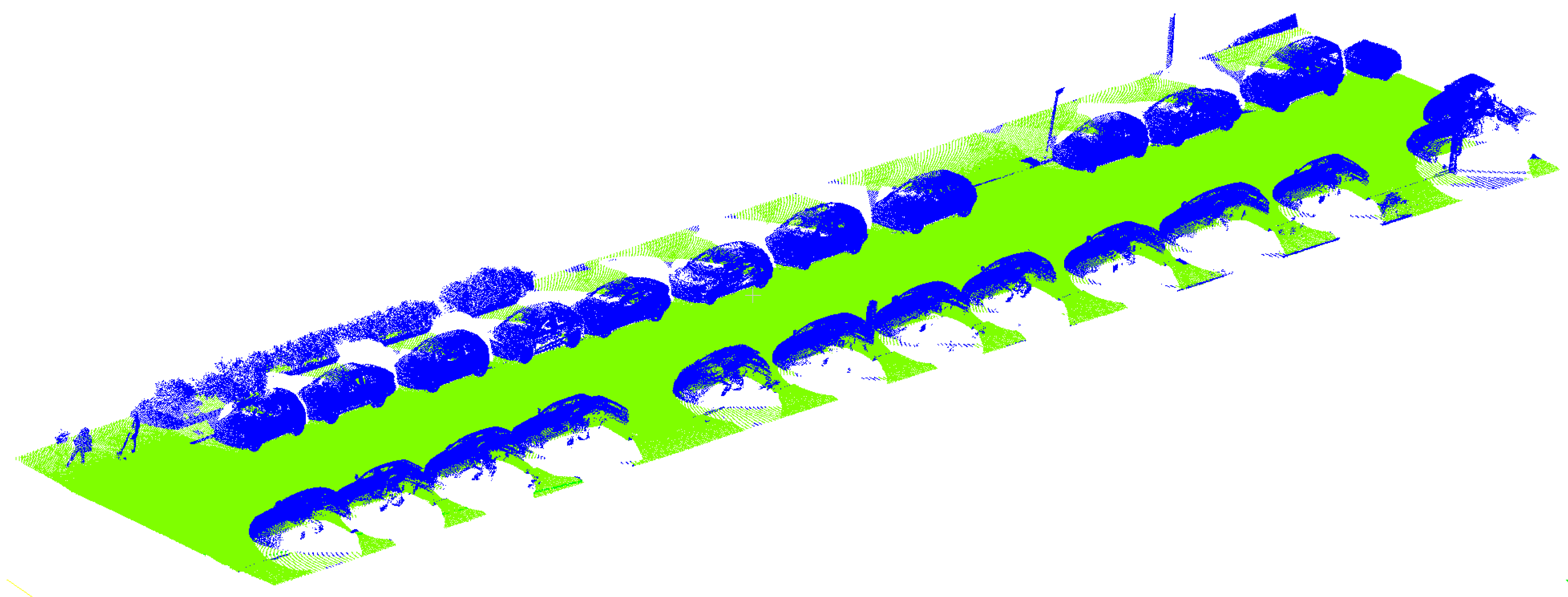
The work carried out in this research study made it possible to create an efficient method to discriminate the points belonging to urban roads from the remaining elements in the analyzed scenes, from a raw LiDAR point cloud with the following information per point: P = (X, Y, Z, I, ts, rn, etc.). Two final products were generated, a segmented point cloud in *.las format and two 3D model in raster format, one with the road surface without interpolation and the other with interpolated shadow areas, generating a continuous model (digital surface model).
The proposed method differs from others such as [
27], since our algorithm was able to analyze all the points of the acquired cloud and even group multiple scenes, regardless of the number of trajectories used by the vehicle to gather data, which significantly sped up the process.
The results of the fine segmentation show very high precision, recall and F-score values. These metrics were compared with those of other similar studies such as [
57,
58,
59] and the results obtained are similar and even better, which demonstrates the ability of the algorithm to correctly segment the MLS point clouds with similar characteristics used in this study.
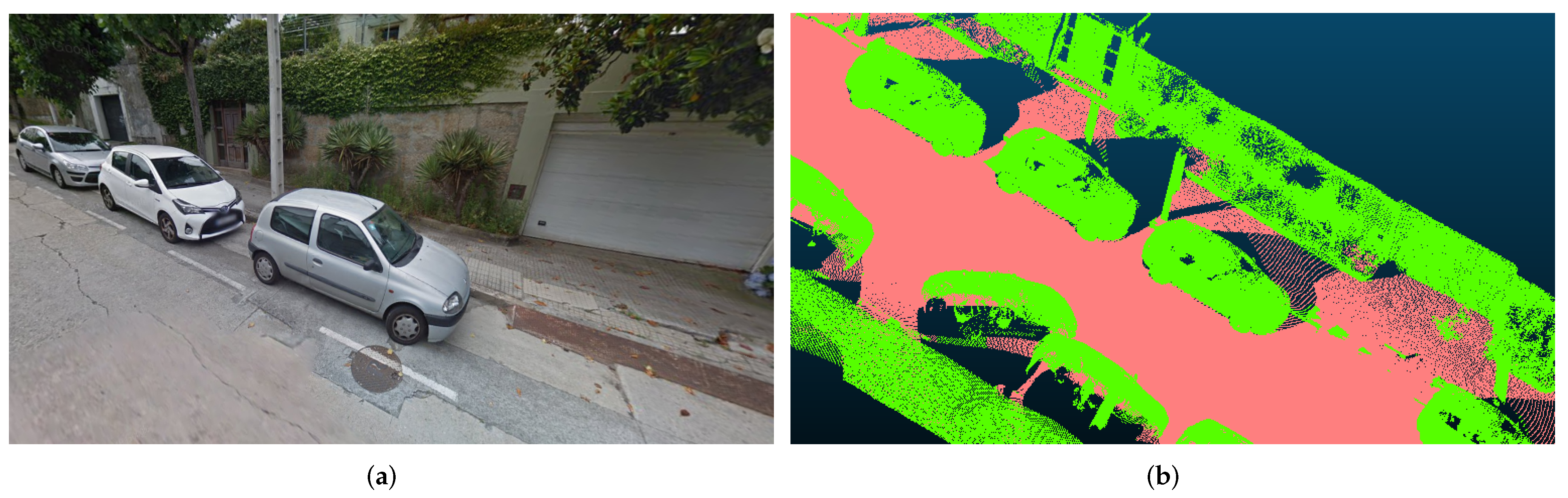
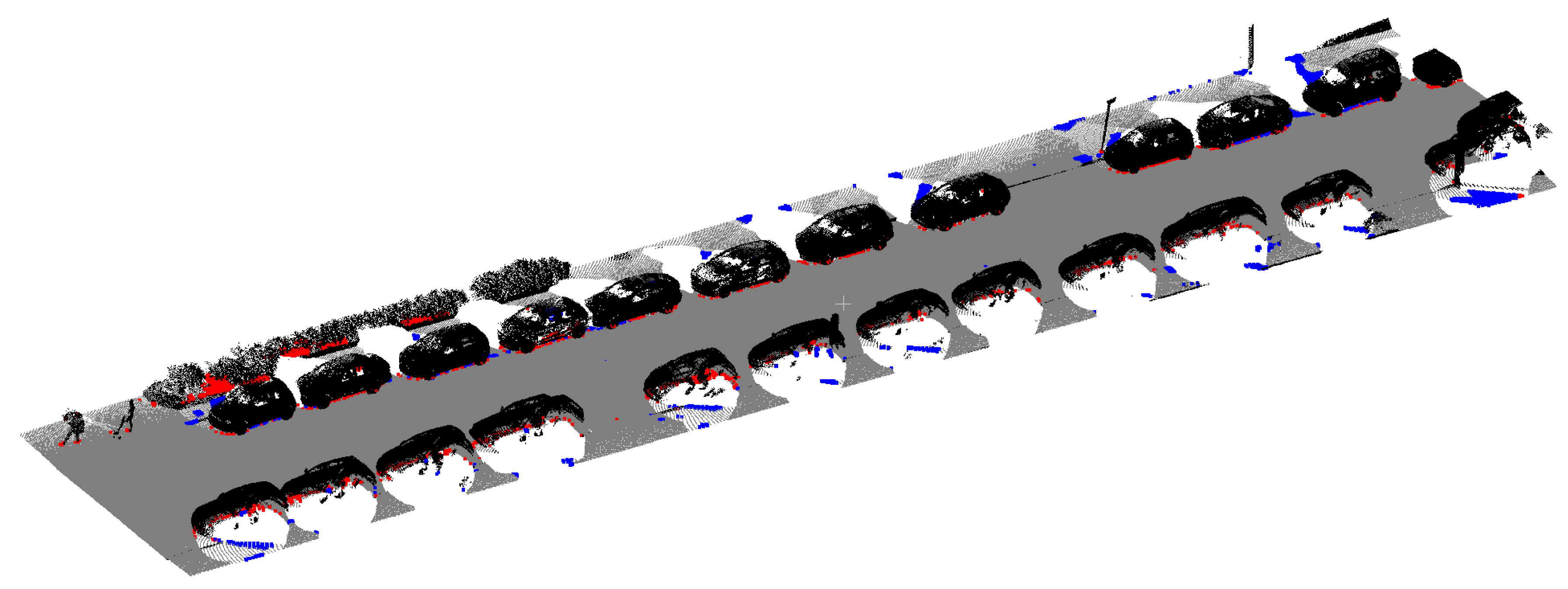
As expected, most of the false positives were located in the transition zones between orthogonal planes, near the buildings, such as in the case of cars, and false negatives were located on sidewalks, which are usually the most difficult areas to segment due to the existence of shadow areas in MLS data.
As this segmentation was intended to be used to generate impedance surfaces for an accessibility analysis and the 3D models used in these task must have high spatial resolution and precision in the segmentation, we decided to prepare the algorithm to avoid false positives even though we had to increase the number of false negatives, because these are easily solvable with the interpolation method used later.
Likewise, the vertical parts of the curbs were intentionally segmented as non-floor because, in the accessibility analysis, they are obstacles that both pedestrians with mobility problems and wheelchair users must overcome.
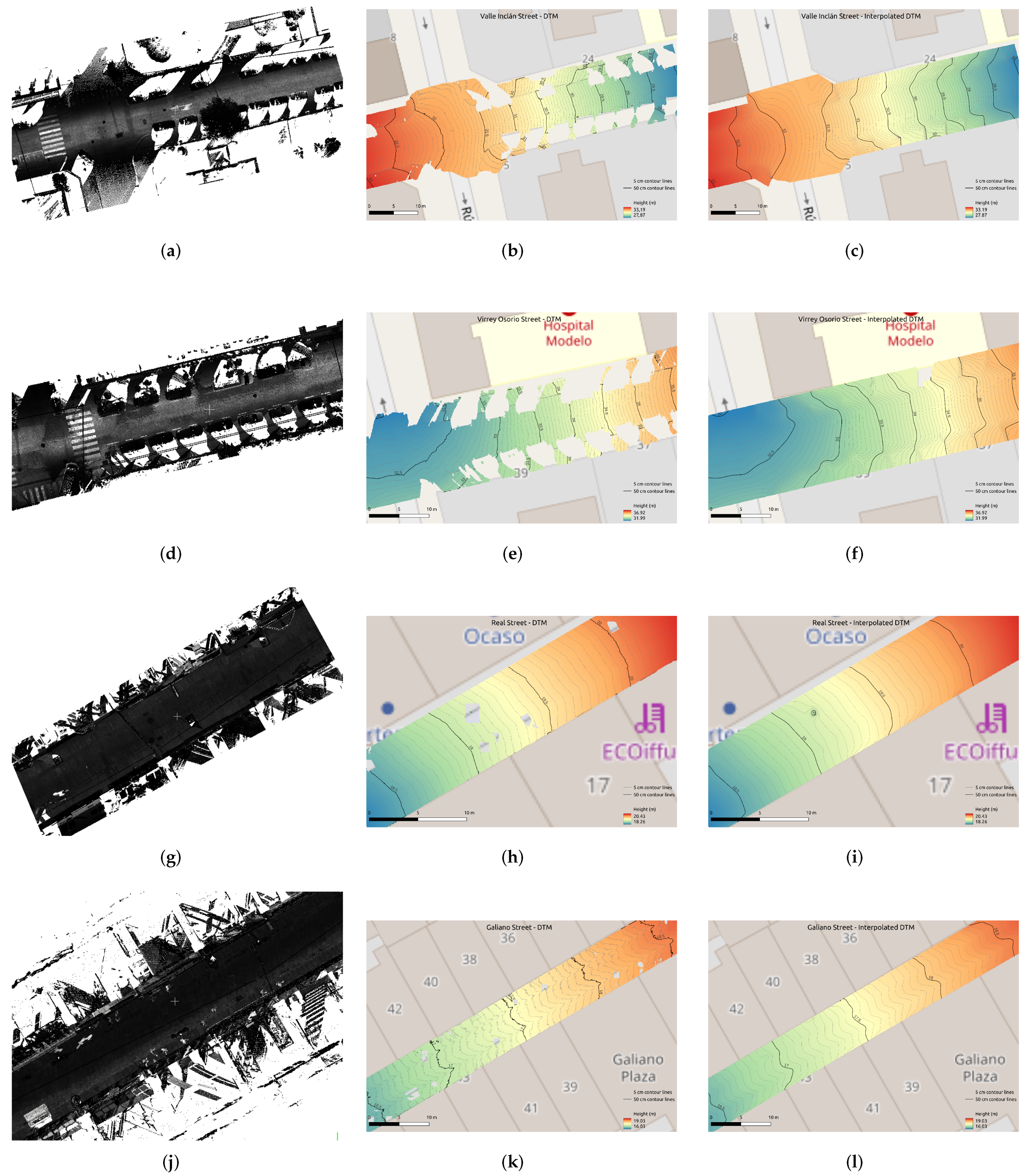
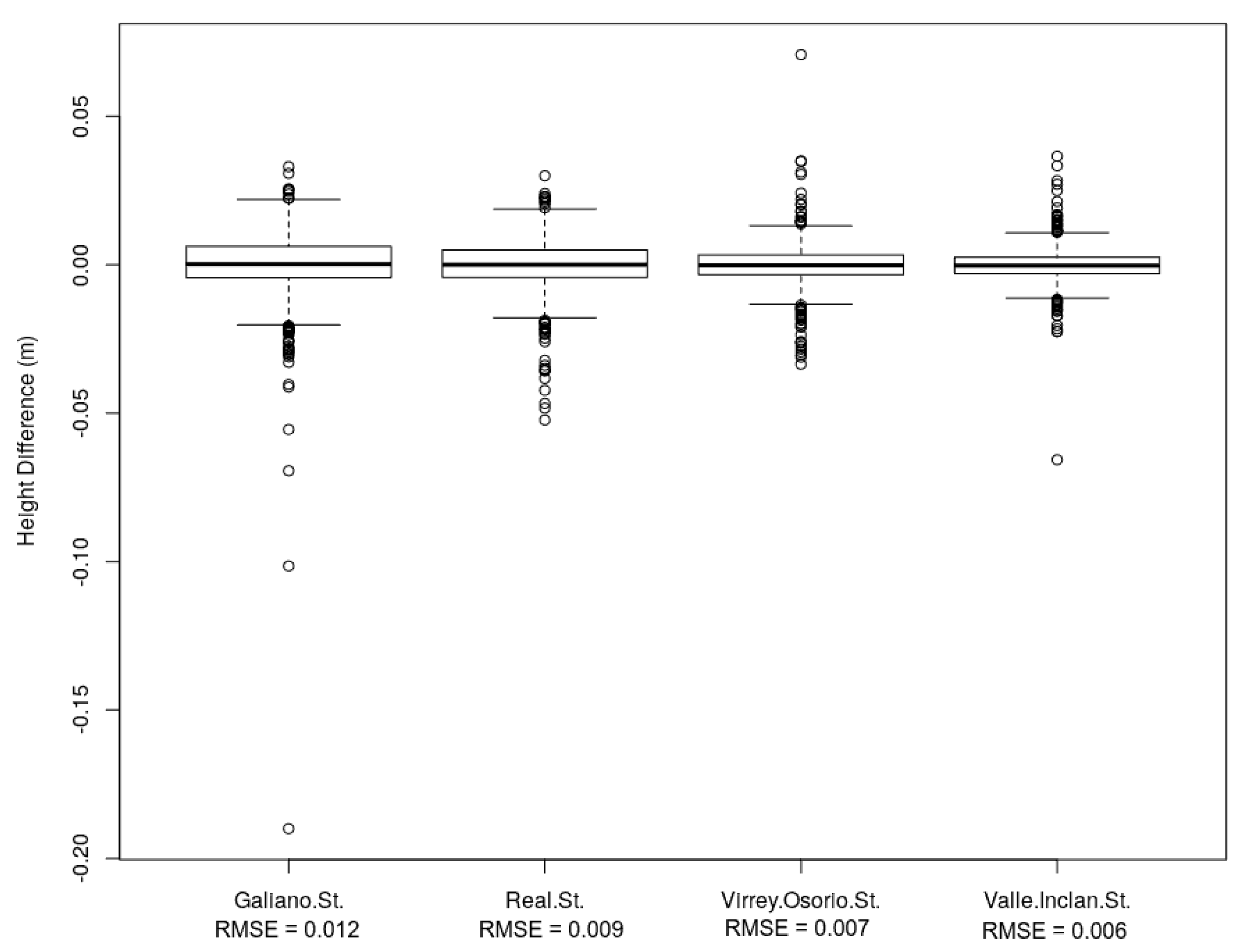
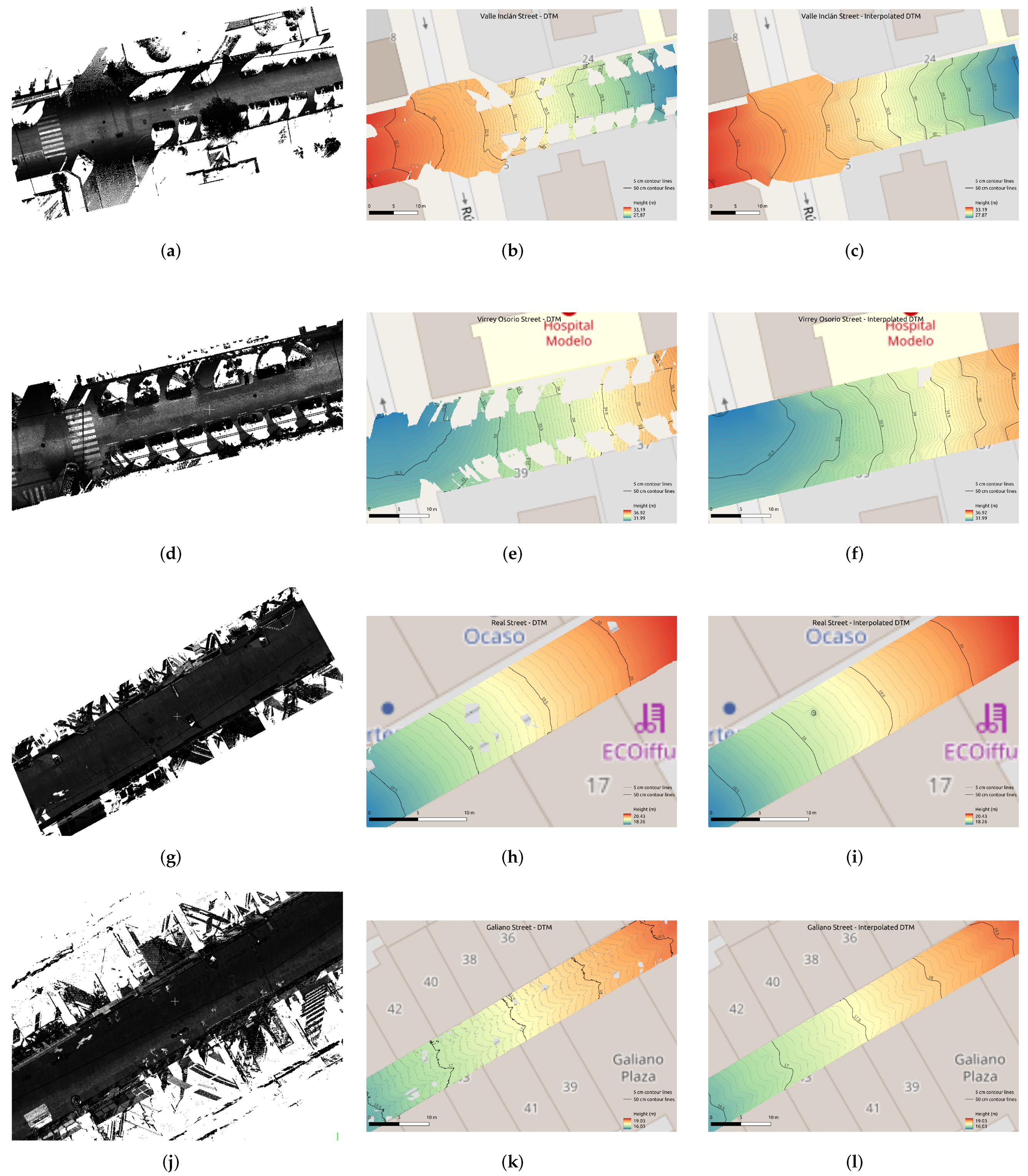
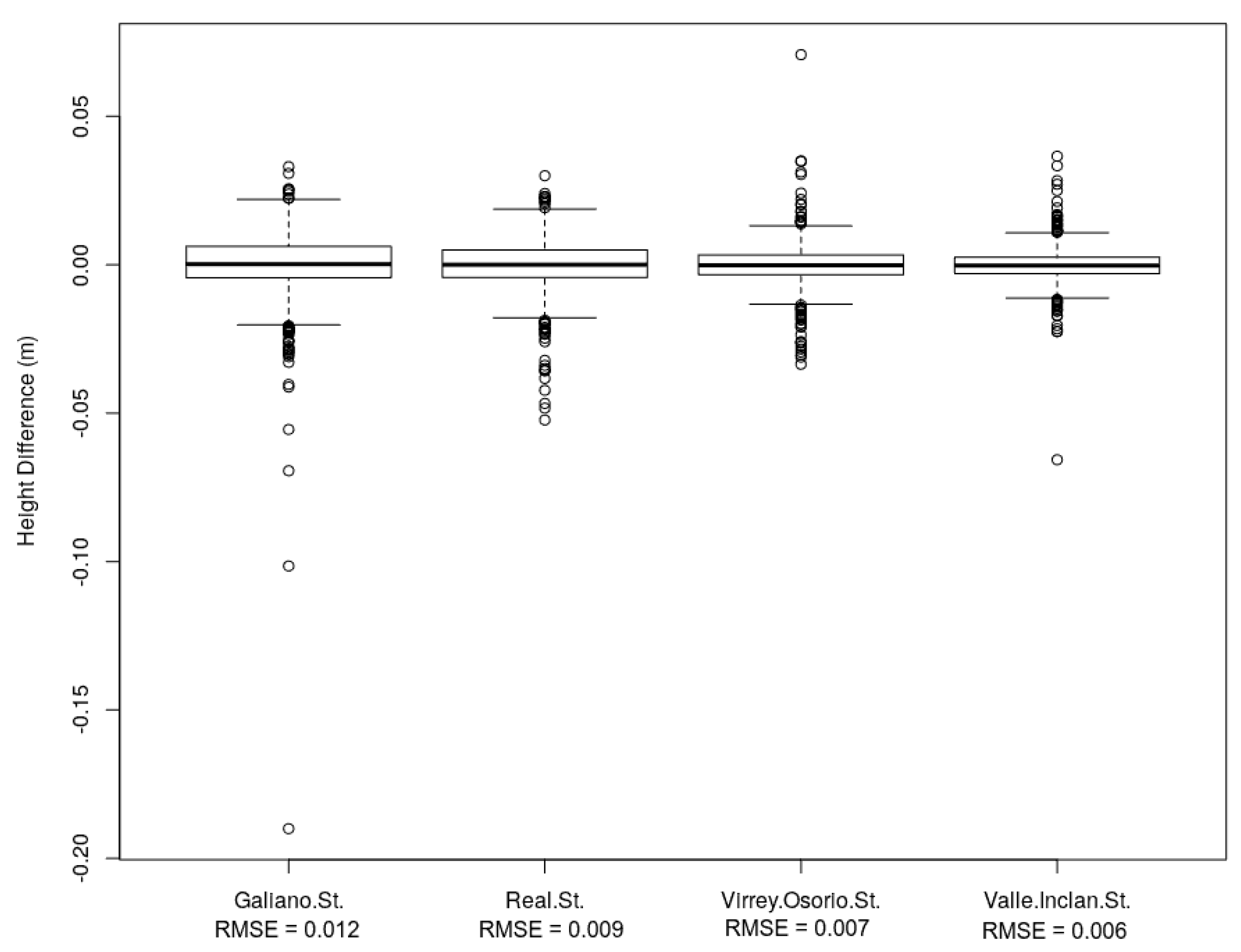
The validation of the 3D model algorithm was developed in two phases, one for the areas with real data and the other for regions without data, in which the algorithm interpolated with the values of the adjacent points to generate a continuous model. The results show that the method was more efficient when the density of points in the scene was high, obtaining mean errors close to 0 and maximum errors of 20 mm, as it can be seen in
Section 3.4. On the contrary, it had limitations in regions without data, in which it was necessary to interpolate to generate a continuous model. In these areas, the mean errors were between 1 and 33 mm and the maximum errors between −68 and 146 mm. These errors corresponded to transition regions between pavements and roadways, showing that the interpolation method was not able to accurately locate the break lines and it joined adjacent points diagonally, making it a problem to identify curbs. This explains the obtained errors being lower in the two pedestrian streets (Real and Galiano) than in those passable by vehicles, since the occluded areas were smaller and required less interpolation. In the same way, the results are also better in flat areas, such as the center of the streets, than in transition areas between the pavement and the road.
Although the objective of this paper is not to reconstruct the lines of the curbs, the eigenvectors of each point were obtained with precision and the planes in which they were found were also defined. This knowledge opens a line of research in which we are currently working with the intention of reconstructing curb lines, even in areas without data, with which procedures for the automatic generation of differentiated 3D models could be applied for pavements and driveways. In the same way, as in the method by [
24], the fusion of our model with others obtained from ALSs, even with lower spatial resolution, could be an affordable solution to improve precision in these conflictive areas.
It was also proved that the algorithm generated the models in processing times, as it can be seen in
Table 7. No differentiating data was found in terms of processing times for scenes with a greater number of shadow areas, different slopes or the presence of road elements. Processing times depend solely on the performance of the computer equipment used and the amount of RAM available at the time of the analysis—in our case, a computer with 12 GB of RAM, which took approximately 3 h to process 100,000,000 points.
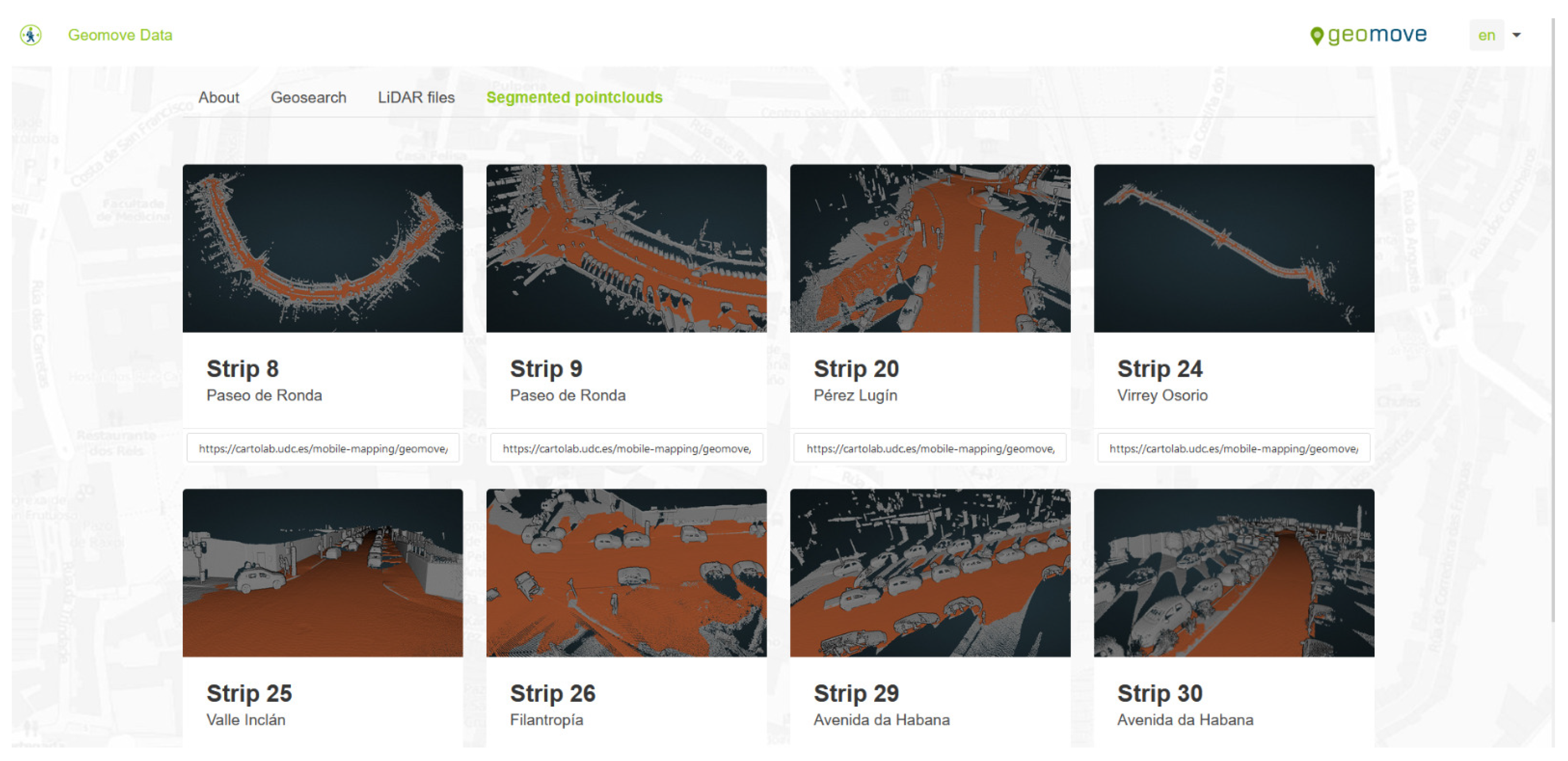
During the bibliographic review process, no similar free-licensed methods that allow one to obtain 3D models automatically were found. All the algorithms found had a proprietary license, so it was decided to implement the algorithm as a Plug-in in all versions of QGIS 3.X. In the same way, both the algorithm and the MLS data were published under the Attribution 4.0 International
https://creativecommons.org/licenses/by/4.0/ (CC BY 4.0) license in
https://gitlab.com/cartolab (Gitlab-Cartolab) and
https://cartolab.udc.es/geomove/datos/en (Geomove/data), respectively, which offers an interesting data bank to be used in other investigations as ground truth. A screenshot of the Geomove LiDAR data download website can be seen in
Figure 15.
5. Conclusions
Mobile LiDAR technology has proven to be an accurate and fast tool to obtain dense point clouds from urban roads without interrupting the usual pace of the city. For this paper, 12 km of urban roads were scanned and the proposed algorithm efficiently discriminated the point cloud acquired by the MLS, differentiating the points of the road from the rest of the urban elements and allowing us to automatically generate a 3D model of the road surfaces in due processing times. All existing elements over 25 cm in height on the road were considered as non-ground areas, thus impossible to be crossed by pedestrians. The rest of the road space was rasterized as a digital surface model with a cell resolution of 5 cm, taking advantage of the high density of points provided by the LiDAR sensor. This made it possible to accurately differentiate any small defect in the pavement that would make it more or less comfortable for a pedestrian to walk on. The average difference in the values of the dimensions of the 3D model created with respect to the values of the LiDAR point cloud did not exceed 20 mm, which achieves a high accuracy in the modeling of walkable surfaces. We could detect holes or defects in the pavements, as we can see in the sinkhole of 10–15 cm identified in
Figure 11i.
The main problem with MLS point clouds in urban environments is the presence of occlusions (lack of data). The presence of vehicles parked on the side of the road and similar obstacles, such as containers or bus shelters, among others, prevent the laser beam from hitting the road. To fill in these areas without data, an interpolation method was used on the closest points to generate a complete and continuous model of the entire road surface. The accuracy achieved in this interpolation showed an average errors of less than 1 cm in most of the occluded areas, without exceeding 33 mm as the highest average difference. Only in situations where there were curbs a maximum difference of less than 15 cm was reached in some cases. In any case, this model proved to be efficient for urban mobility studies and, more specifically, in the Big-Geomove project, which used this modeled base surface to identify safe pedestrian routes in the urban areas analyzed. For this purpose, in addition to this model, different obstacles that impeded or hindered circulation, both for pedestrians and wheelchair users, such as curbs, lamppost, benches, stairs, etc., were detected. With these obstacles, different impedance surfaces were generated, which made it possible to identify the optimal pedestrian routes in urban areas, through the application of accumulated cost surface techniques.
As a continuation of this work, a line of research was opened with the main objective of developing a method to reconstruct curb lines. Having this line accurately available would allow differentiated 3D models for sidewalks and roadways to be generated, avoiding interpolation errors of occluded zones in the transition spaces between them.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}