
Satellite Laser Altimetry Data-Supported High-Accuracy Mapping of GF-7 Stereo Images

 , ,
, ,
Abstract

1. Introduction
2. Materials and Methods
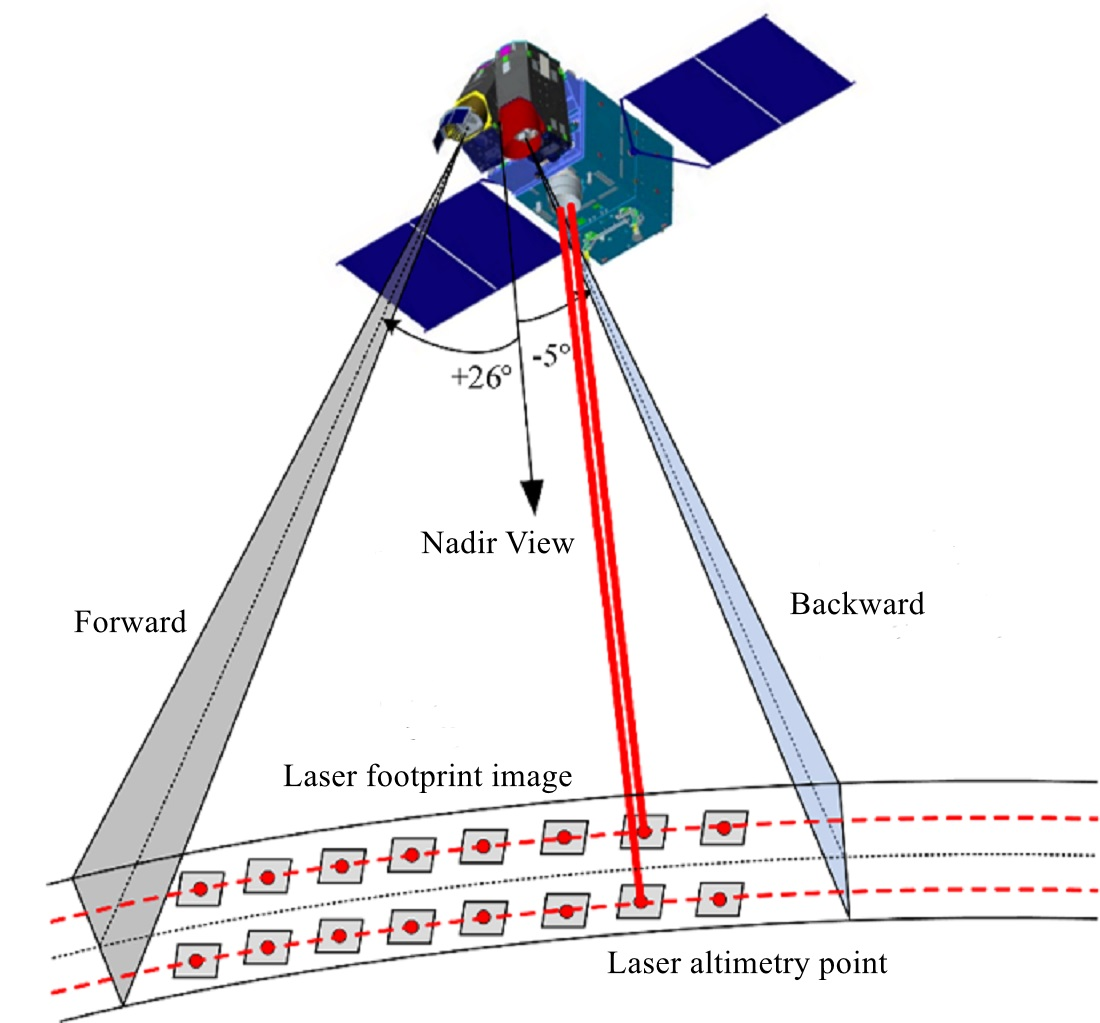
2.1. Stereo Image and Laser Altimetry Data of GF-7 Satellite
2.2. Workflow of Block Adjustment of GF-7 Stereo Images Integrating Laser Altimetry Data
2.3. Elevation Control Point Extracting Based on Footprint Image
2.3.1. Coarse-to-Fine Direct Matching Method
- Substitute the object coordinates of the laser altimetry point into the stereo image imaging model, and the initial position of the laser altimetry point on the stereo image (x, y) should be obtained; then, this point together with the image point (x0, y0) of the laser altimetry point on the footprint image construct a conjugate point pair.
- Calculate the correlation coefficient between the stereo image area centred on (x, y) and the footprint image area centred on (x0, y0) with the same search window size (e.g., laser spot size) point by point according to Equation (1), and take the maximum correlation coefficient point (x1′, y1′) as the pixel-level registration point:where g and g′ are the grey values of the footprint image and stereo image, respectively, and are the average grey value of the matching window, and w and h represent the width and height of the search window, respectively.
- Take the coordinates (x0, y0) as a constant and perform a least-squares matching according to Equation (2) with (x1′, y1′) as initial values for obtaining subpixel level registration point (x1, y1):where d0 and d1 are image radiation distortion parameters, and (a0, a1, a2, b0, b1, b2) are the image geometric transformation parameters.
2.3.2. Local Constrain Method
- Match the feature points in the laser footprint images with the corresponding area in the stereo images; the operator can be SIFT [30]. The distribution of feature points should be evenly, and the number should be more than three, which are called the constraint points;
- Using the image coordinates of constraint points, an affine transformation model can be established, and the model is as follows:where (x′, y′) are the image coordinate in stereo image, (x, y) are the image coordinates in laser footprint image, and (a0, a1, a2, b0, b1, b2) are the affine transform parameters.
- Substitute the image coordinates of the laser altimetry point into Equation (3), and then the image coordinates of laser point in the stereo image can be calculated.
2.4. Block Adjustment Model Based on Rational Function Model
3. Experiment and Analysis
3.1. Experiment Data and Experiment Area
3.2. Geometric Accuracy Effect Validation of Laser Altimetry Data on Stereo Images
3.3. Block Adjustment with Different Control Condition
3.4. Accuracy Validation of Digital Surface Mode
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grodecki, J.; Dial, G. Block Adjustment of High-Resolution Satellite Images Described by Rational Polynomials. Photogramm. Eng. Remote Sens. 2003, 69, 59–68. [Google Scholar] [CrossRef]
- Fraser, C.; Hanley, H. Bias-compensated RPCs for sensor orientation of high-resolution satellite imagery. Photogramm. Eng. Remote Sens. 2005, 71, 909–915. [Google Scholar] [CrossRef]
- Tang, X.; Liu, C.; Zhou, P.; Cao, N.; Li, F.; Wang, X. Satellite-imagery geometric accuracy improvement based on direct correction of dominant coefficients. Photogramm. Eng. Remote Sens. 2020, 86, 215–224. [Google Scholar] [CrossRef]
- Shan, J.; Tian, X.; Li, S.; Li, R. Advances of spaceborne laser altimetry technology. Acta Geod. Cartogr. Sin. 2022, 51, 964–982. [Google Scholar]
- Tang, X.; Liu, C.; Zhang, H.; Wang, X.; Li, G.; Mo, F.; Li, F. GF-7 Satellite Stereo Images Block Adjustment Assisted with Laser Altimetry Data. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1423–1430. [Google Scholar]
- Zhang, G.; Xu, K.; Jia, P.; Hao, X.; Li, D. Integrating stereo images and laser altimeter data of the ZY3-02 satellite for improved earth topographic modeling. Remote Sens. 2019, 11, 2453. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.L.; Riris, H.; Sirota, M.; McGarry, J.; Palm, S.; Ketchum, E.A.; Follas, R.B. Geoscience laser altimeter system (GLAS) on the ICESat mission: Pre-launch and on-orbit measurement performance. Geophys. Res. Lett. 2003, 32, 1534–1536. [Google Scholar]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J.P. Overview of the ICESat Mission. Geophys. Res. Lett. 2005, 32, L21S01. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.L.; Riris, H.; Sirota, J.M.; Mcgarry, J.F.; Palm, S.; Yi, D.; Liiva, P. Geoscience Laser Altimeter System (GLAS) on the ICESat mission: On-orbit measurement performance. Geophys. Res. Lett. 2005, 32, L21S02. [Google Scholar] [CrossRef]
- Duncanson, L.I.; Niemann, K.O.; Wulder, M.A. Estimating forest canopy height and terrain relief from GLAS waveform metrics. Remote Sens. Environ. 2010, 114, 138–154. [Google Scholar] [CrossRef]
- Shuman, C.A.; Zwally, H.J.; Schutz, B.E.; Brenner, A.C.; Dimarzio, J.P.; Suchdeo, V.P.; Fricher, H.A. ICESat Antarctic elevation data: Preliminary precision and accuracy assessments. Geophys. Res. Lett. 2006, 33, L07501. [Google Scholar] [CrossRef]
- Magruder, L.A.; Webb, C.E.; Urban, T.; Silverberg, E.C.; Schutz, B.E. ICESat altimetry data product verification at White Sands Space Harbor. IEEE Trans. Geosci. Remote Sens. 2007, 45, 147–155. [Google Scholar] [CrossRef]
- Martin, C.F.; Thomas, R.H.; Krabill, W.B.; Manizade, S.S. ICESat range and mounting bias estimation over precisely-surveyed terrain. Geophys. Res. Lett. 2005, 32, L21S0721. [Google Scholar] [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanangh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite-2 Mission: A Global Geolocated Photon Product Derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef] [PubMed]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Fu, X.; Mo, F.; Li, S.; Dou, X. ZY3-02 laser altimeter on-orbit geometrical calibration and test. Acta Geod. Cartogr. Sin. 2017, 46, 714–723. [Google Scholar]
- Xie, J.; Tang, X.; Mo, F.; Tang, H.; Wang, Z.; Wang, X.; Liu, Y.; Tian, S.; Liu, R.; Xia, X. In-orbit geometric calibration and experimental verification of the ZY3-02 laser altimeter. Photogramm. Rec. 2018, 33, 341–362. [Google Scholar] [CrossRef]
- Li, G.; Tang, X. Analysis and Validation of ZY-3 02 Satellite Laser Altimetry Data. Acta Geod. Cartogr. Sin. 2017, 46, 1939–1949. [Google Scholar]
- Gonzalez, J.H.; Bcchmann, M.; Scheiber, R.; Krieger, G. Definition of ICESat selection criteria for their use as height reference for TanDEM-X. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2750–2757. [Google Scholar] [CrossRef]
- Tsutomu, Y.; Koichiro, D.; Kazuo, S. Combined use of InSAR and GLAS data to produce an accurate DEM of the Antarctic ice sheet: Example from the Breivika-Asuka station area. Polar Sci. 2010, 4, 1–17. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, B.; Liu, S.; Tong, X.; Ding, R.; Xie, H.; Hong, Z. A Two-Step Block Adjustment Method for DSM Accuracy Improvement with Elevation Control of ICESat-2 Data. Remote Sens. 2022, 14, 4455. [Google Scholar] [CrossRef]
- Li, G.; Tang, X.; Gao, X.; Wang, H.; Wang, Y. ZY-3 Block Adjustment Supported by GLAS Laser Altimetry Data. Photogramm. Rec. 2016, 31, 88–107. [Google Scholar] [CrossRef]
- Zhou, P.; Tang, X.; Wang, Z.; Cao, N.; Wang, X. Vertical accuracy effect verification for satellite imagery with different GCPs. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1268–1272. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Zhang, Z.; Li, X.; Tao, P.; Song, M. ICESat laser points assisted block adjustment for Mapping Satellite-1 stereo imagery. Acta Geod. Cartogr. Sin. 2018, 47, 359–369. [Google Scholar]
- Cao, N.; Zhou, P.; Wang, X.; Tang, X.; Li, G. Refined processing of laser altimeter data-aided satellite geometry model. J. Sens. 2018, 22, 599–610. [Google Scholar]
- Li, G.; Tang, X.; Gao, X.; Wang, X.; Fan, W.; Chen, J.; Mo, F. Integration of ZY3-02 satellite laser altimetry data and stereo images for high-accuracy mapping. Photogramm. Eng. Remote Sens. 2018, 84, 569–578. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Liu, R.; Huang, G.; Zhao, C.; Zhen, Y.; Tang, H.; Dou, X. Overview of the GF-7 laser altimeter system mission. Earth Space Sci. 2020, 7, e2019EA000777. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Mo, F.; Dou, X.; Li, X.; Li, S.; Li, S.; Huang, G.; Fu, X.; Liu, R.; et al. GF-7 dual-beam laser altimeter on-orbit geometric calibration and test verification. Acta Geod. Cartogr. Sin. 2021, 50, 384–395. [Google Scholar]
- Li, G.; Tang, X.; Chen, J.; Yao, J.; Liu, Z.; Gao, X.; Zuo, Z.; Zhou, X. Processing and preliminary accuracy validation of the GF-7 satellite laser altimetry data. Acta Geod. Cartogr. Sin. 2021, 50, 1–11. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Zhang, J.Q.; Hu, A.W. Method and precision analysis of multi-baseline photogrammetry. Geomat. Inf. Sci. Wuhan Univ. 2007, 32, 847–851. [Google Scholar]
- Pan, H.B. The Research on Fine Processing of ZiYuan-3 Surveying Satellite Basic Products. Ph.D. Thesis, Wuhan University, Wuhan, China, May 2014. [Google Scholar]
- Tao, C.V.; Hu, Y. A comprehensive study of the rational function model for photogrammetric processing. Photogramm. Eng. Remote Sens. 2001, 67, 1347–1357. [Google Scholar]
- Wu, B.; Tang, S.; Zhu, Q.; Tong, K.Y.; Hu, H.; Li, G. Geometric integration of high-resolution satellite imagery and airborne LiDAR data for improved geopositioning accuracy in metropolitan areas. ISPRS J. Photogramm. Remote Sens. 2015, 109, 139–151. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo Processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Ye, Y.; Shan, J.; Bruzzone, L.; Shen, L. Robust Registration of Multimodal Remote Sensing Images Based on Structural Similarity. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2941–2958. [Google Scholar] [CrossRef]
- Fan, Z.; Zhang, L.; Wang, Q.; Liu, S.; Ye, Y. A fast matching method of SAR and optical images using angular weighted orientated gradients. Acta Geod. Cartogr. Sin. 2021, 50, 1390–1403. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Stereo Cameras | Laser Footprint Cameras |
|---|---|---|
| Imaging mode | Linear-array Pushbroom | Frame |
| Focal length | 5520 mm | Camera1: 2580 mm Camera2: 2576 mm |
| Ground sample distance | Forward panchromatic: 0.8 m Backward panchromatic: 0.65 m Backward multispectral: 2.6 m | 3.2 m |
| Pixel size | Panchromatic: 7 µm Multispectral: 28 µm | 16.5 µm |
| Spectral range | Panchromatic: 0.45–0.9 µm Multispectral: Blue: 0.45–0.52 µm Green: 0.52–0.59 µm Red: 0.63–0.69 µm Near infrared: 0.77–0.89 µm | Visible light: 0.5–0.7 µm Laser: 1064 nm |
| Swath width | 20 km | 1.6 km |
| Adjustment Scheme | Terrains | No. of CPs | X (m) | Y (m) | XY (m) | Height (m) | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAX | RMSE | MAX | RMSE | MAX | RMSE | Mean | Max | |||
| Free network adjustment | Whole | 146 | 6.41 | 17.71 | 4.65 | −11.73 | 7.92 | 18.79 | 2.15 | 1.34 | 5.24 |
| Plain | 91 | 6.35 | 17.71 | 5.23 | −11.73 | 8.22 | 18.79 | 1.95 | 1.11 | 5.21 | |
| Hill | 28 | 6.53 | 14.19 | 3.44 | −8.54 | 7.38 | 15.03 | 2.45 | 1.68 | 5.24 | |
| Mountain | 27 | 6.52 | 14.47 | 3.54 | −5.42 | 7.41 | 15.23 | 2.41 | 1.77 | 4.26 | |
| Laser altimetry as vertical control | Whole | 146 | 6.52 | 18.12 | 4.71 | −11.24 | 8.05 | 19.03 | 0.75 | 0.25 | 1.59 |
| Plain | 91 | 6.47 | 18.12 | 5.21 | −11.24 | 8.30 | 19.03 | 0.75 | 0.23 | 1.59 | |
| Hill | 28 | 6.63 | 14.50 | 3.58 | −8.55 | 7.54 | 15.23 | 0.71 | 0.27 | 1.46 | |
| Mountain | 27 | 6.59 | 14.74 | 3.93 | −5.70 | 7.67 | 15.41 | 0.81 | 0.33 | 1.50 | |
| All GCPs as vertical control | Whole | 146 | 6.50 | 18.10 | 4.71 | −11.55 | 8.03 | 19.09 | 0.65 | 0.35 | 1.63 |
| Plain | 91 | 6.45 | 18.10 | 5.27 | −11.55 | 8.33 | 19.09 | 0.59 | 0.27 | 1.53 | |
| Hill | 28 | 6.60 | 14.47 | 3.52 | −8.67 | 7.48 | 15.26 | 0.68 | 0.50 | 1.25 | |
| Mountain | 27 | 6.58 | 14.70 | 3.68 | −5.58 | 7.54 | 15.45 | 0.76 | 0.46 | 1.63 | |
| Scheme | No. of GCPs | Mean (m) | RMSE (m) | MAX (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x | y | h | x | y | xy | h | x | y | xy | h | ||
| P1 | 5 | 0.96 | −0.89 | 1.31 | 3.91 | 1.99 | 4.39 | 2.12 | −9.64 | 5.11 | 9.70 | 5.24 |
| 10 | 0.19 | −0.29 | 1.26 | 1.74 | 1.57 | 2.34 | 2.05 | −5.35 | 4.44 | 6.25 | 5.21 | |
| 30 | 0.19 | −0.00 | 0.97 | 1.35 | 1.19 | 1.80 | 1.71 | −5.21 | −3.31 | 5.22 | 5.17 | |
| 60 | 0.27 | −0.05 | 0.79 | 1.15 | 1.14 | 1.62 | 1.44 | 3.98 | −3.85 | 4.09 | 5.17 | |
| 120 | −0.00 | 0.01 | 0.44 | 0.99 | 1.05 | 1.45 | 0.80 | −3.98 | −2.90 | 4.37 | 2.79 | |
| 146 | −0.00 | 0.03 | 0.36 | 0.93 | 1.01 | 1.38 | 0.65 | −3.82 | 2.80 | 4.34 | 1.64 | |
| P2 | 5 | 0.77 | −0.93 | 0.26 | 3.98 | 2.11 | 4.50 | 0.75 | −10.4 | 5.45 | 10.51 | 1.59 |
| 10 | 0.15 | −0.40 | 0.26 | 1.82 | 1.61 | 2.42 | 0.75 | −5.89 | 4.62 | 6.51 | 1.59 | |
| 30 | 0.15 | −0.09 | 0.26 | 1.43 | 1.19 | 1.86 | 0.75 | −5.81 | −3.41 | 5.81 | 1.60 | |
| 60 | 0.26 | −0.14 | 0.26 | 1.15 | 1.13 | 1.61 | 0.76 | 3.98 | −3.70 | 4.09 | 1.59 | |
| 120 | −0.00 | −0.03 | 0.26 | 0.99 | 1.06 | 1.45 | 0.76 | −3.91 | −2.91 | 4.30 | 1.61 | |
| 146 | −0.00 | −0.00 | 0.26 | 0.93 | 1.01 | 1.38 | 0.76 | −3.75 | 2.78 | 4.27 | 1.56 | |
| P3 | 5 | 0.76 | −0.91 | 0.25 | 3.98 | 2.09 | 4.49 | 0.75 | −10.4 | 5.38 | 10.54 | 1.59 |
| 10 | 0.15 | −0.39 | 0.26 | 1.81 | 1.59 | 2.41 | 0.74 | −5.88 | 4.53 | 6.46 | 1.60 | |
| 30 | 0.16 | −0.07 | 0.24 | 1.42 | 1.20 | 1.86 | 0.70 | −5.78 | −3.34 | 5.78 | 1.59 | |
| 60 | 0.27 | −0.11 | 0.21 | 1.15 | 1.13 | 1.61 | 0.65 | 3.98 | −3.69 | 4.08 | 1.58 | |
| 120 | −0.01 | −0.02 | 0.18 | 0.99 | 1.05 | 1.44 | 0.55 | −3.90 | −2.86 | 4.30 | 1.37 | |
| 146 | −0.01 | 0.01 | 0.15 | 0.93 | 1.02 | 1.38 | 0.51 | −3.75 | 2.81 | 4.28 | 1.38 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Cui, X.; Guo, L.; Wu, L.; Tang, X.; Liu, S.; Yuan, D.; Wang, X. Satellite Laser Altimetry Data-Supported High-Accuracy Mapping of GF-7 Stereo Images. Remote Sens. 2022, 14, 5868. https://doi.org/10.3390/rs14225868
Liu C, Cui X, Guo L, Wu L, Tang X, Liu S, Yuan D, Wang X. Satellite Laser Altimetry Data-Supported High-Accuracy Mapping of GF-7 Stereo Images. Remote Sensing. 2022; 14(22):5868. https://doi.org/10.3390/rs14225868
Chicago/Turabian StyleLiu, Changru, Ximin Cui, Li Guo, Ling Wu, Xinming Tang, Shuhan Liu, Debao Yuan, and Xia Wang. 2022. "Satellite Laser Altimetry Data-Supported High-Accuracy Mapping of GF-7 Stereo Images" Remote Sensing 14, no. 22: 5868. https://doi.org/10.3390/rs14225868
APA StyleLiu, C., Cui, X., Guo, L., Wu, L., Tang, X., Liu, S., Yuan, D., & Wang, X. (2022). Satellite Laser Altimetry Data-Supported High-Accuracy Mapping of GF-7 Stereo Images. Remote Sensing, 14(22), 5868. https://doi.org/10.3390/rs14225868