
Micro-Doppler Feature Extraction of Rotating Structures of Aircraft Targets with Terahertz Radar

Abstract
1. Introduction
2. Modeling of the Rotating Target Echo
3. Parameter Extraction of Rotating Targets
3.1. Signal Analysis
3.2. Extraction of Parameters Based on the Enhancement of Wavelet Coefficients and Inverse Radon Transform at Low SNR
3.3. Extraction of Parameters Based on Time–Frequency Distribution Fitting
4. Micro-Motion Simulation Experiment Results of Turbine Blades
4.1. The Simulation Process
- Import the turbine model, and set the model size, material, and rotation angle as required. The model utilized in this paper is a turbine with three blades on a turbine aircraft (the three-bladed turbine model illustrated in Figure 6).

- 2.
- Set variables such as radar pulse repetition frequency (PRF), rotational speed, rotation time, and other parameters. The simulation parameters of the three-bladed turbine in different frequency bands are reflected in Table 1.
- 3.
- Set the frequency, add the plane-wave excitation, and set the angle of view.
- 4.
- Set the far field, and output the out file.
- 5.
- Set the algorithm using PO-only illuminated from the front algorithm to improve the accuracy of the electromagnetic calculation.
- 6.
- Set the mesh and the global solution method. Coarse is adopted to improve the calculation speed, the triangular mesh is selected, and the global algorithm MLFMM is set.
- 7.
- To achieve the effect of blade rotation, set the model rotation according to the previously defined variable rot = (k − 1) × drot. The rotation angle changes as k changes. The parameter optimization function in OPTFEKO is utilized to alter the value of k from 1 to ns, where ns is the time of turbine rotation. Submit computing tasks using OPTFEKO.
- 8.
- After the electromagnetic calculation software is finished, the field intensity at each rotation angle is output, which is equivalent to the radar echo signal generated by turbine rotation at every moment. Since the results obtained by the electromagnetic calculation software are not the real field intensity, the MATLAB software is applied to design a reading data program to perform the mathematical transformation on the simulation results to obtain the real radar echo data of the turbine at every moment. Thus, the MATLAB software is used to read out the radar echo value of each time in turn and splice it into an echo sequence. Then, the radar echo sequence under slow time can be obtained.
- 9.
- Sketch the time–frequency distribution of the STFT-transformed echo signal.
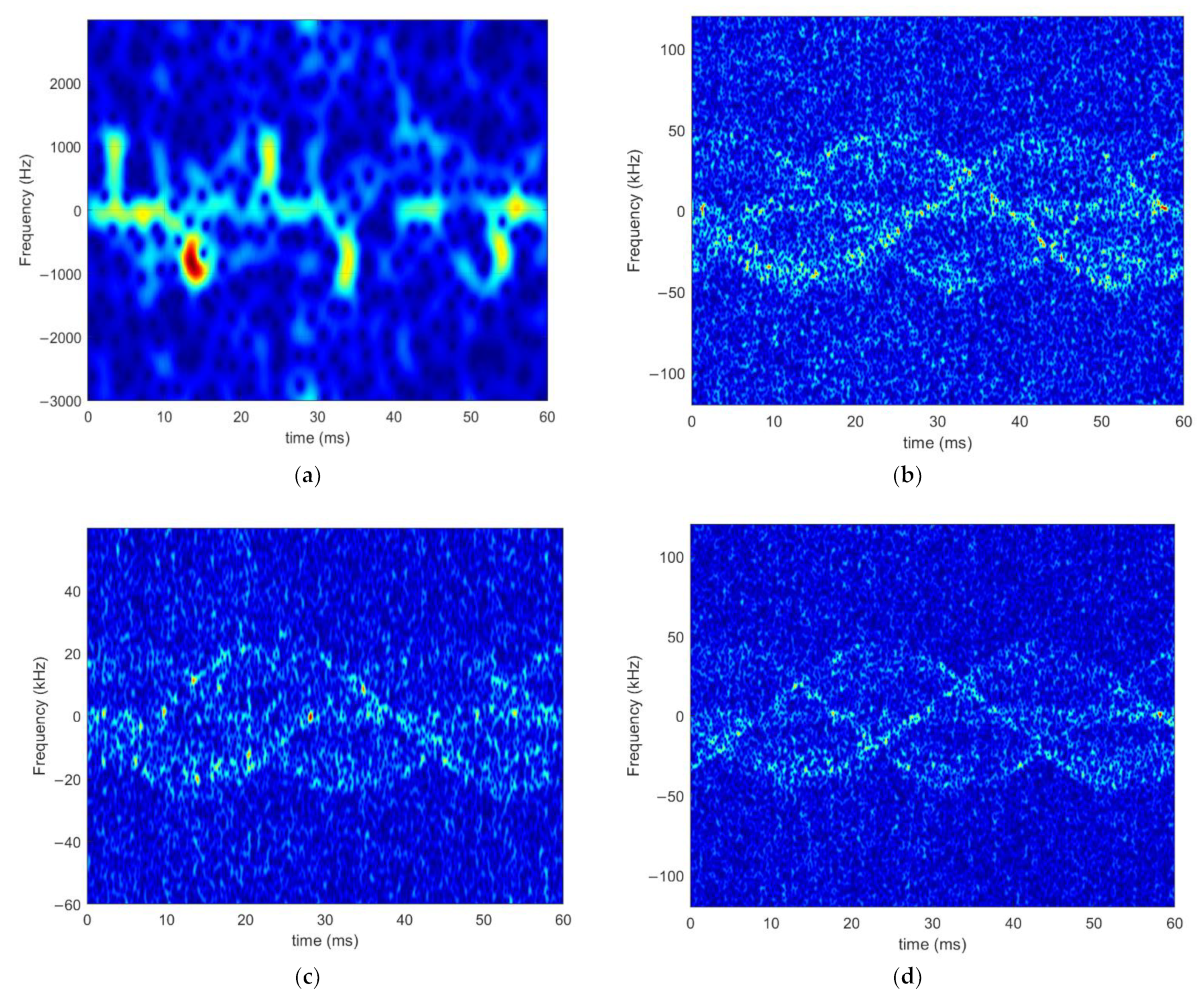
4.2. Analysis of the Micro-Doppler Features of Turbine Blades
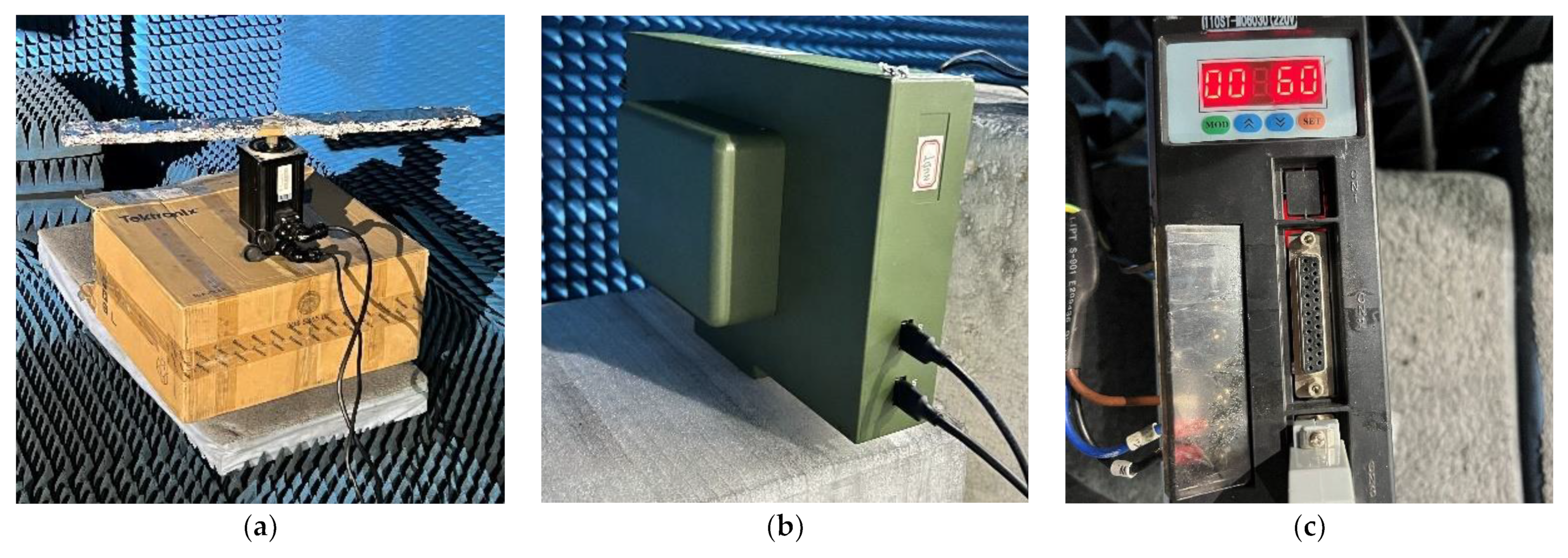
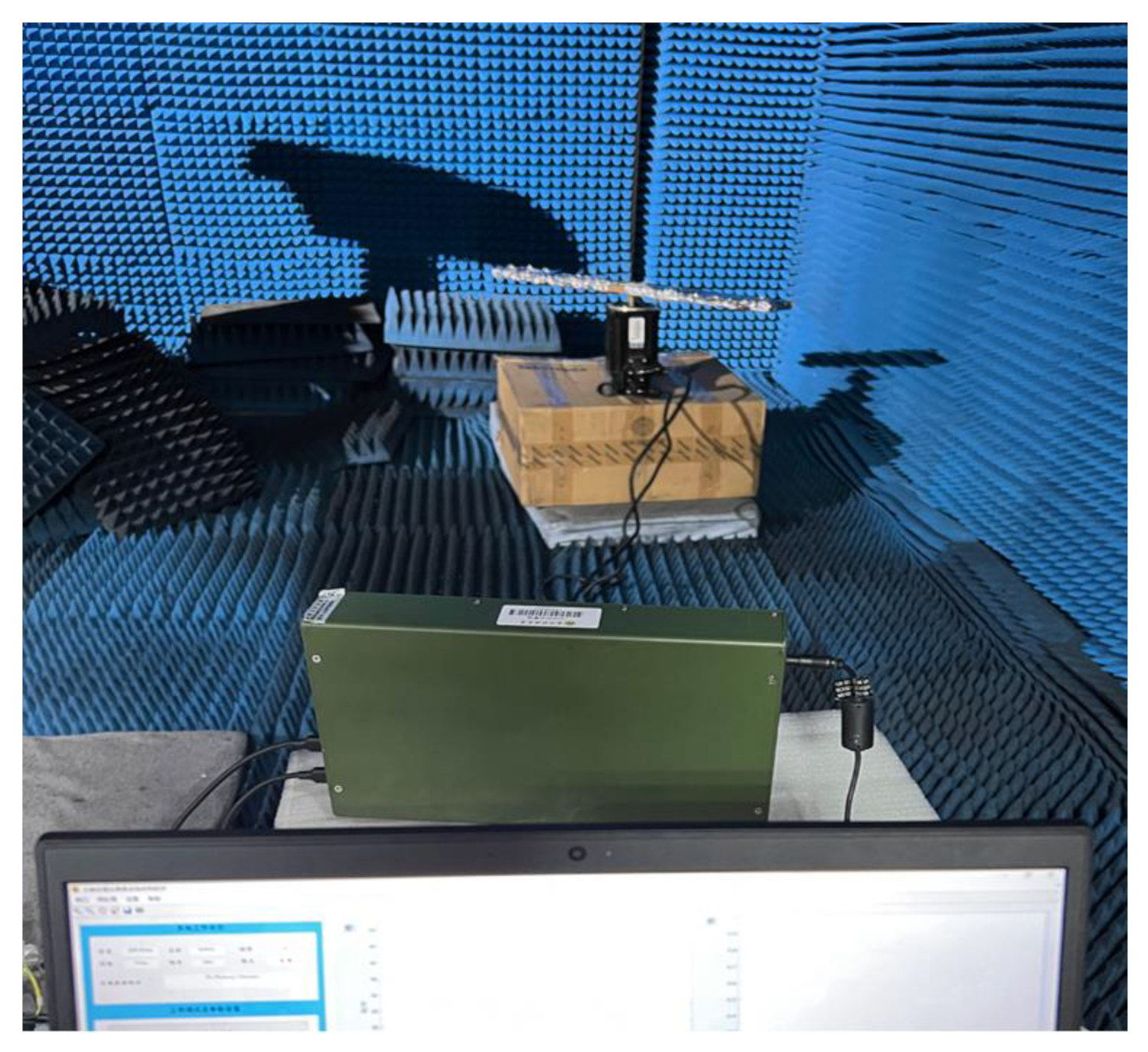
5. Micro-Motion Measurement Experiment Results of a Helicopter Rotor Model
5.1. Experimental Simulation
5.2. Analysis of the Micro-Doppler Features of the Helicopter Rotor Blades
6. Discussion
6.1. Turbine Parameter Extraction
6.2. Extraction of Helicopter Rotor Parameters Based on Fitting Time–Frequency Distribution
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| The Definition of Each Parameter in Section 2 | |
| Parameters | Definition |
| α | The azimuth angle of the incident wave. |
| β | The pitch angle of the incident wave. |
| f0 | The central frequency of the radar. |
| λ | The wavelength of the radar. |
| R0 | The distance from the radar to the center of the helicopter propeller. |
| Ω | The angular velocity of the helicopter propeller’s rotation. |
| v | The radial velocity of the helicopter propeller’s rotation. |
| x0 | The horizontal coordinates of the scattering point P at the initial moment. |
| xt | The horizontal coordinates of the scattering point P at time t. |
| y0 | The vertical coordinates of the scattering point P at the initial moment. |
| yt | The vertical coordinates of the scattering point P at time t. |
| lP | The distance of point P from the center of the propeller. |
| RP0 | The distance from the radar to point P on the helicopter propeller at the initial moment. |
| RPt | The distance from the radar to the point P on the helicopter propeller at time t. |
| φ0 | The rotation angle at the initial moment. |
| φt | The rotation angle at time t. |
| z0 | The height of the helicopter propeller. |
| N | The number of propeller blades. |
| L | The length of the propeller blade. |
| The Full Meanings of the Abbreviations Mentioned in This Paper | |
| Abbreviation | Full Name |
| THz | Terahertz |
| SNR | Signal-to-noise ratio |
| STFT | Short-time Fourier transform |
| WVD | Wigner–Ville distribution |
| RCS | Radar cross-section |
| EMC | Electromagnetic compatibility |
| MOM | Method of moments |
| MLFMM | Multilevel fast multipole method |
| FEM | Finite element method |
| PO | Physical optics |
| LE-PO | Large-element physical optics |
| PRF | Pulse repetition frequency |
| FMCW | Frequency-modulated continuous wave |
References
- Yang, Q.; Deng, B.; Wang, H.; Qin, Y. Advancements in Research on Micro-motion Feature Extraction in The Terahertz Region. Chin. J. Radars 2018, 7, 22–45. [Google Scholar]
- Chen, V.C.; Li, F.Y.; Ho, S.S. Micro-Doppler Effect in Radar-phenomenon, Model and Simulation Study. IEEE Trans. Aerosp. Electron. Syst. 2006, 41, 2–21. [Google Scholar] [CrossRef]
- Chen, V.C. Micro-Doppler Effect of Micro-motion Dynamics: A Review. SPIE 2003, 51, 240–249. [Google Scholar]
- Chen, V.C.; Li, F.Y. Analysis of Micro-Doppler Signatures. IEE Proc. Radar Sonar Navig. 2003, 150, 271–276. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Y.; Li, X.; Guo, G. Analysis of Micro-Doppler and Parameters Estimation. Infrared Millim. Waves 2006, 25, 360–363. [Google Scholar]
- Wang, Z.; Luo, Y.; Li, K.; Yuan, H.; Zhang, Q. Micro-Doppler Parameters Extraction of Precession Cone-Shaped Targets Based on Rotating Antenna. Remote Sens. 2022, 14, 2549. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, J.; Luo, Y. Research Progresses in Radar Feature Extraction, Imaging, and Recognition of Target with Micro-motions. Chin. J. Radars 2018, 7, 531–547. [Google Scholar]
- Chen, V.C.; Ebrary, I. The Micro-Doppler Effect in Radar, 1st ed.; Artech House: Boston, MA, USA, 2011; pp. 18–27. [Google Scholar]
- Mcmillan, R.W.; Trussell, C.W.; Bohlander, R.A.; Butterworth, J.C.; Forsythe, R.E. An Experimental 225 GHz Pulsed Coherent Radar. IEEE Trans. Microw. Theory Tech. 1991, 39, 555–562. [Google Scholar] [CrossRef]
- Li, K.; Jiang, W.; Li, X. Micro-motion Feature Analysis and Extraction Methods for Ballistic Targets. Chin. Syst. Eng. Electron. 2010, 32, 115–118. [Google Scholar]
- Ai, X.; Zou, X.; Yang, J.; Liu, J.; Li, Y. Feature Extraction of Rotating Target Based on Bistatic Micro-Doppler Analysis. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011. [Google Scholar]
- Xu, Z.; Tu, Z.; Li, J.; Pi, Y. Research on Micro-feature Extraction Algorithm of Target Based on Terahertz Radar. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 77. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, H.; Li, L. Target Identification Method Based on Rotor Structure Micro-Doppler Characteristics. Chin. J. Radio Sci. 2013, 28, 50–55. [Google Scholar]
- Ma, J.; Dong, Y.; Li, Y.; Li, L.; Yang, J. Multi-rotor UAV’s Micro-Doppler Characteristic Analysis and Feature Extraction. Chin. J. Univ. Chin. Acad. Sci. 2019, 36, 235–243. [Google Scholar]
- Song, C.; Zhou, L.; Wu, Y.; Ding, C. An Estimation Method of Micro-movement Parameters of UAV Based on The Concentration of Time-frequency. Chin. J. Electron. Inf. Technol. 2020, 42, 2029–2036. [Google Scholar]
- Wang, W.; Zhu, Y.; Tang, Z.; Chen, Y.; Zhu, Z.; Sun, Y.; Zhou, C. Efficient Rotational Angular Velocity Estimation of Rotor Target via Modified Short-Time Fractional Fourier Transform. Remote Sens. 2021, 13, 1970. [Google Scholar] [CrossRef]
- Citak, C.; Akdemir, M.; Yumusak, M. Multidisciplinary. Multiobjective Analysis and Optimization for the Design of Missile Jet Vane. In Proceedings of the 17th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Marple, S.L. Time-frequency Signal analysis: Issues and Alternative Methods. In Proceedings of the IEEE-SP International Symposium on Time-Frequency and Time-Scale Analysis (Cat. No.98TH8380), Pittsburgh, PA, USA, 9 October 1998. [Google Scholar]
- Ma, R.; Liu, W.; Miao, C.; Yang, Z.; Shao, H. The Simulation of Human Walking Micro-Doppler echo and Comparison of Time-frequency Analysis Method. In Proceedings of the 2017 First International Conference on Electronics Instrumentation & Information Systems (EIIS), Harbin, China, 3–5 June 2017. [Google Scholar]
- He, J. A Characterization of Inverse Radon Transform on The Laguerre Hypergroup. J. Math. Anal. Appl. 2006, 318, 387–395. [Google Scholar] [CrossRef][Green Version]
- Stankovic, L.; Dakovic, M.; Thayaparan, T.; Popovic-Bugarin, V. Inverse Radon Transform-Based Micro-Doppler Analysis from a Reduced Set of Observation. Aerosp. Electron. Syst. IEEE Trans. 2015, 51, 1155–1169. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | A | B | C | D |
|---|---|---|---|---|
| Frequency (GHz) | 3 | 120 | 120 | 220 |
| Blade length (m) | 1.10 | 1.10 | 0.55 | 0.55 |
| Rotate speed (rpm) | 1000 | 1000 | 1000 | 1000 |
| Radar incidence direction θ (°) | 95 | 95 | 95 | 95 |
| Radar incidence direction φ (°) | 35 | 35 | 35 | 35 |
| PRF (kHz) | 6 | 240 | 120 | 240 |
| Sampling time (ms) | 60 | 60 | 60 | 60 |
| Parameter | A | B |
|---|---|---|
| Rotate speed (r/s) | 1 | 1.5 |
| Blade length (cm) | 30 | 30 |
| Center frequency of the radar (GHz) | 120 | 120 |
| Radar incidence direction θ (°) | 90 | 90 |
| Radar incidence direction φ (°) | 0 | 0 |
| Bandwidth (MHz) | 4000 | 4000 |
| PRF(Hz) | 5000 | 5000 |
| Sample frequency (kHz) | 500 | 500 |
| Sampling time (s) | 2 | 1.33 |
| SNR = 5 dB | SNR = 0 dB | |
|---|---|---|
| Theoretical micro-Doppler (kHz) | 26.31 | 26.31 |
| Estimated micro-Doppler (kHz) | 24.12 | 23.93 |
| Relative error | 8.3% | 9.0% |
| Practical rotational speed (r/s) | 16.667 | 16.67 |
| Estimated rotational speed (r/s) | 16.666 | 16.666 |
| Relative error | 0.007% | 0.007% |
| Practical blade length (m) | 0.550 | 0.55 |
| Estimated blade length (m) | 0.504 | 0.500 |
| Relative error | 8.4% | 9.1% |
| P1 | P2 | |
|---|---|---|
| Theoretical micro-Doppler (Hz) | 1507.96 | 2261.95 |
| Estimated micro-Doppler (Hz) | 1358.45 | 2094 |
| Relative error | 9.9% | 7.4% |
| Practical rotational speed (r/s) | 1 | 1.5 |
| Estimated rotational speed (r/s) | 0.991 | 1.492 |
| Relative error | 0.90% | 0.53% |
| Practical blade length (m) | 0.3 | 0.3 |
| Estimated blade length (m) | 0.273 | 0.279 |
| Relative error | 9.0% | 7.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, X.; Deng, B.; Wang, H. Micro-Doppler Feature Extraction of Rotating Structures of Aircraft Targets with Terahertz Radar. Remote Sens. 2022, 14, 3856. https://doi.org/10.3390/rs14163856
Qin X, Deng B, Wang H. Micro-Doppler Feature Extraction of Rotating Structures of Aircraft Targets with Terahertz Radar. Remote Sensing. 2022; 14(16):3856. https://doi.org/10.3390/rs14163856
Chicago/Turabian StyleQin, Xiaoyu, Bin Deng, and Hongqiang Wang. 2022. "Micro-Doppler Feature Extraction of Rotating Structures of Aircraft Targets with Terahertz Radar" Remote Sensing 14, no. 16: 3856. https://doi.org/10.3390/rs14163856
APA StyleQin, X., Deng, B., & Wang, H. (2022). Micro-Doppler Feature Extraction of Rotating Structures of Aircraft Targets with Terahertz Radar. Remote Sensing, 14(16), 3856. https://doi.org/10.3390/rs14163856