
Effect of Stochastic Modeling for Inter-Frequency Biases of Receiver on BDS-3 Five-Frequency Undifferenced and Uncombined Precise Point Positioning


Abstract
:1. Introduction
2. Methods
2.1. Multi-Frequency UC-PPP Model of BDS-3
2.2. Stochastic Modeling for IFB Parameters
3. Data Description and Processing Strategy
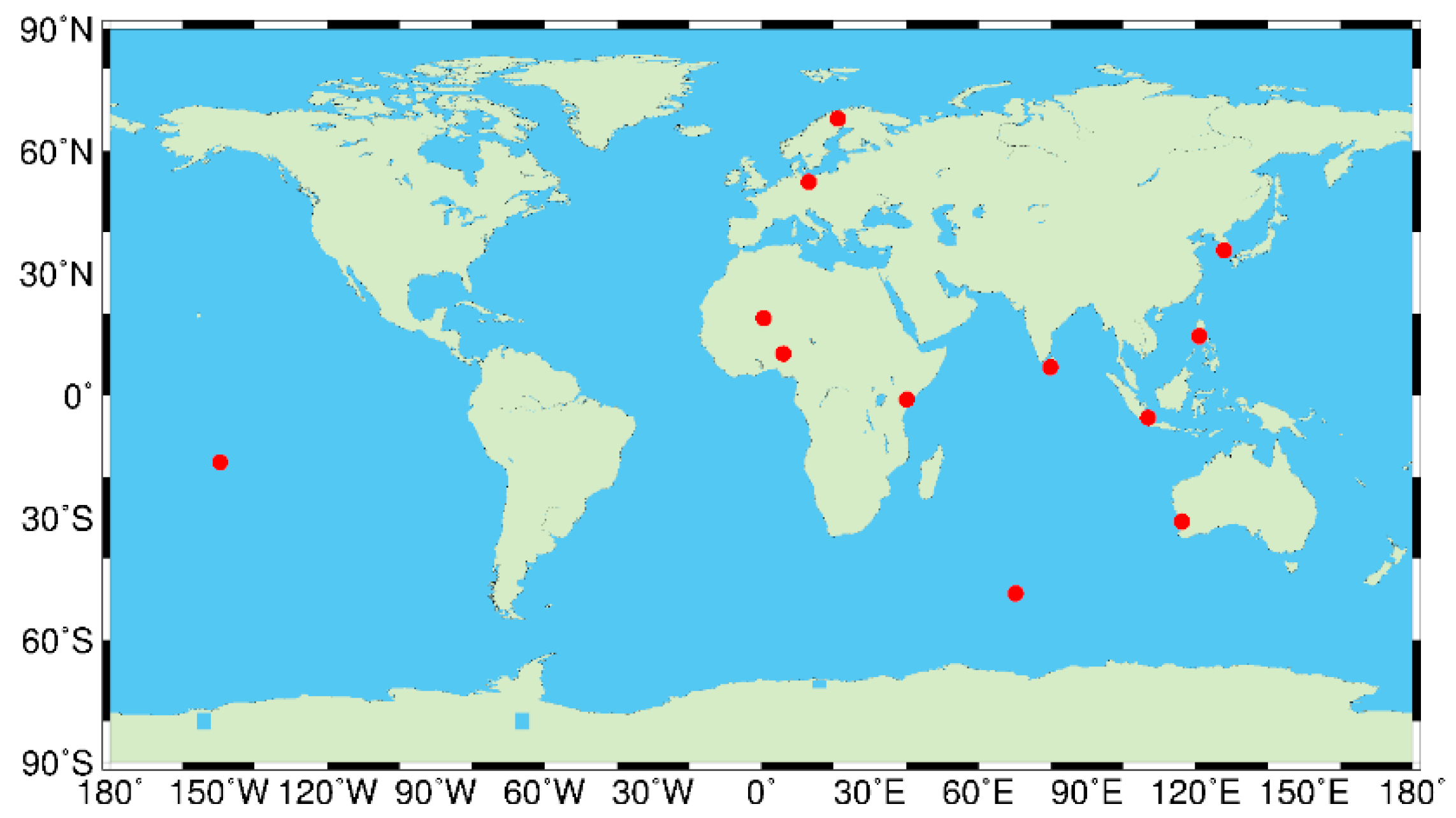
3.1. Experimental Datasets
3.2. Processing Strategy
4. Results and Discussion
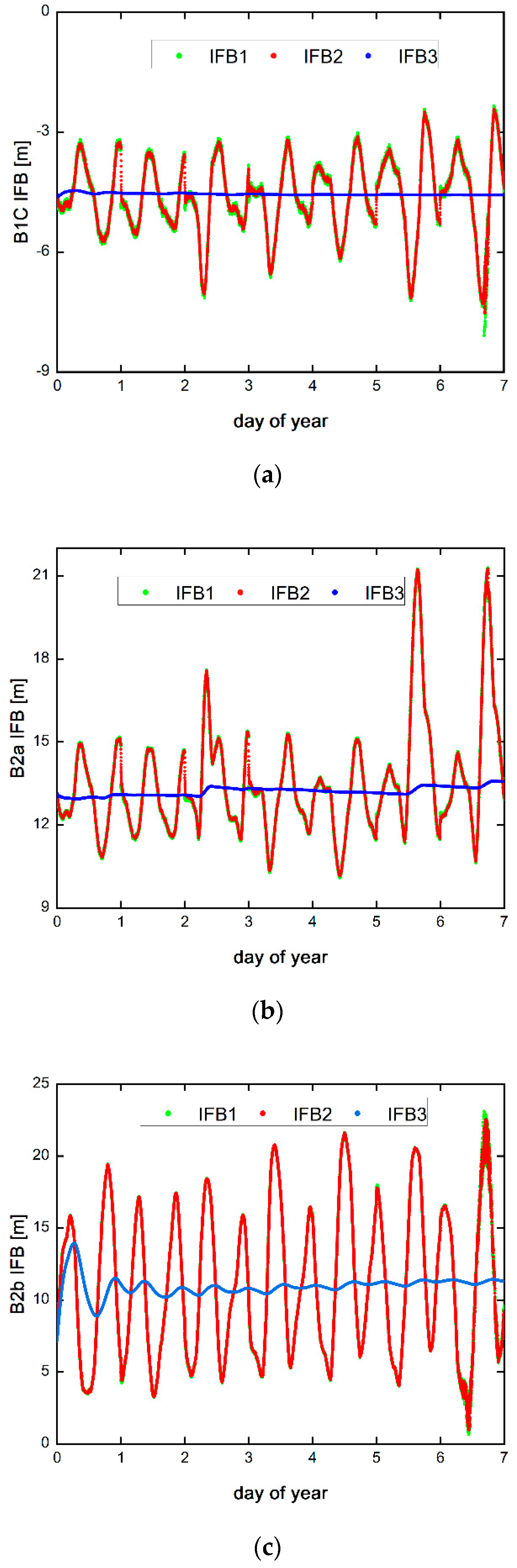
4.1. The Characteristics of Time Series for IFB
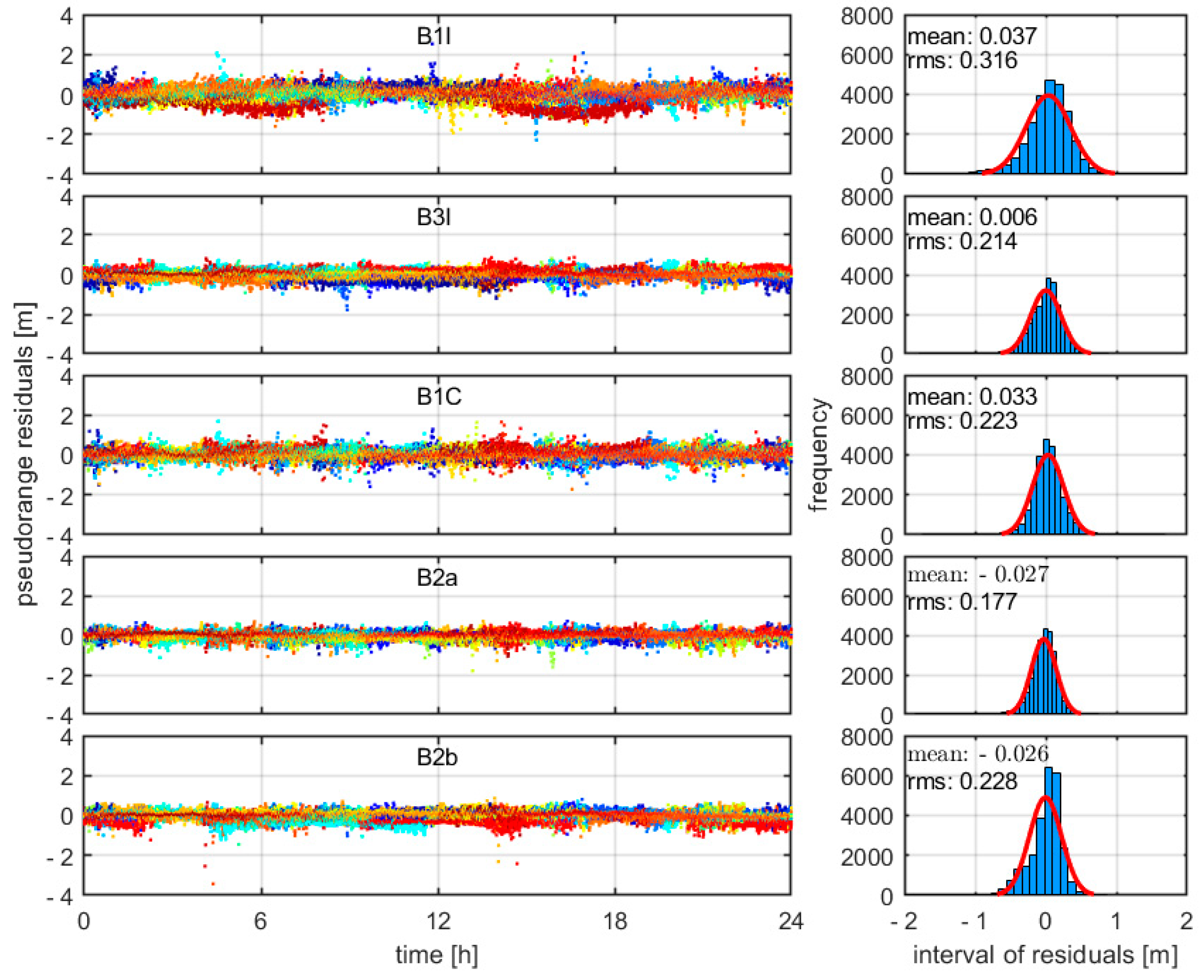
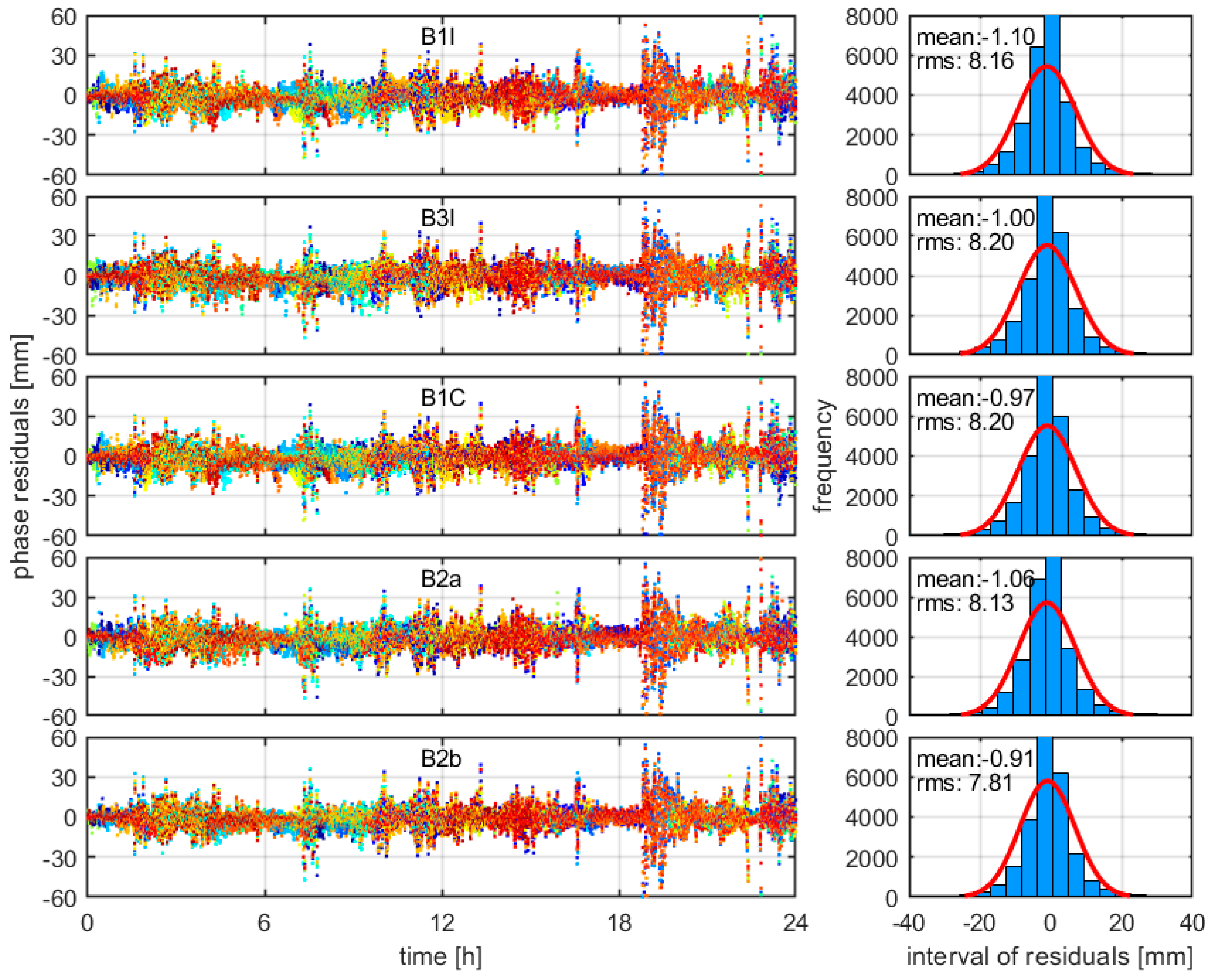
4.2. The Influence of IFB Stochastic Models on Observation Residuals
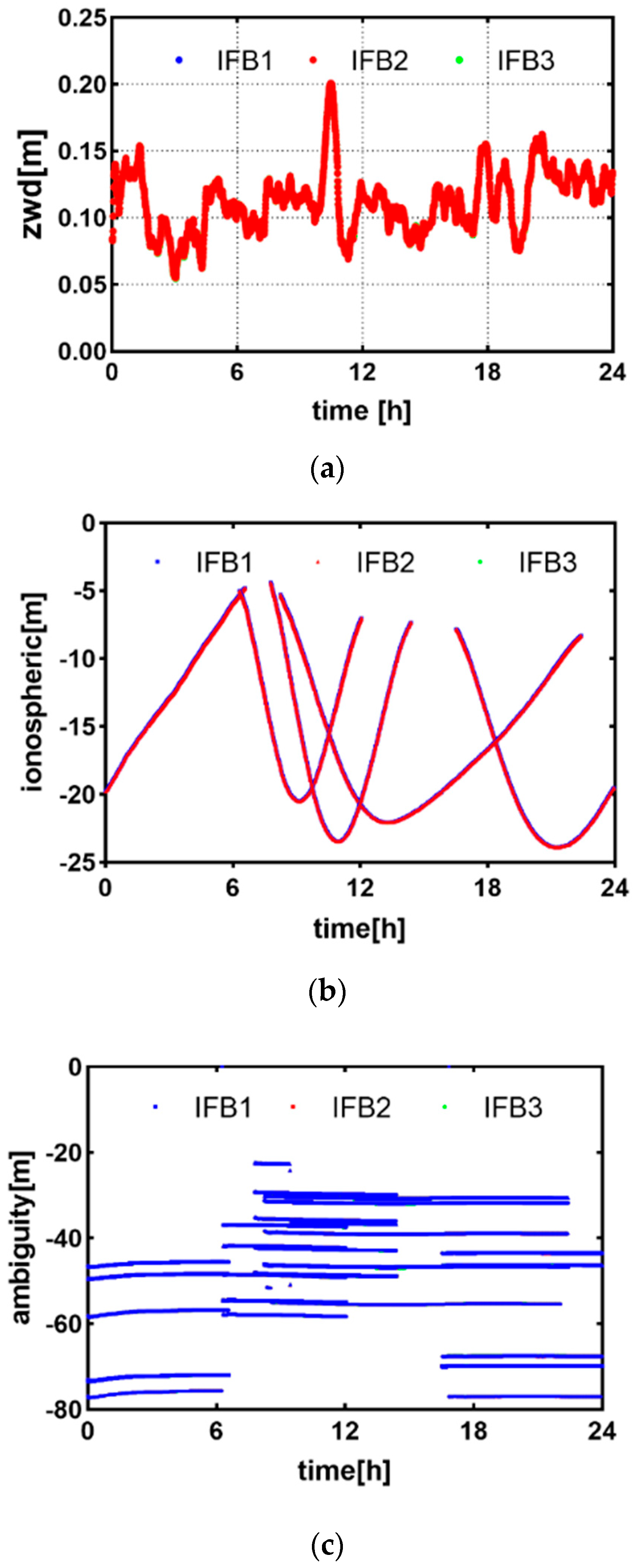
4.3. The Influence of IFB Stochastic Models on ZWDs, Slant Ionospheric Delays, and Ambiguities
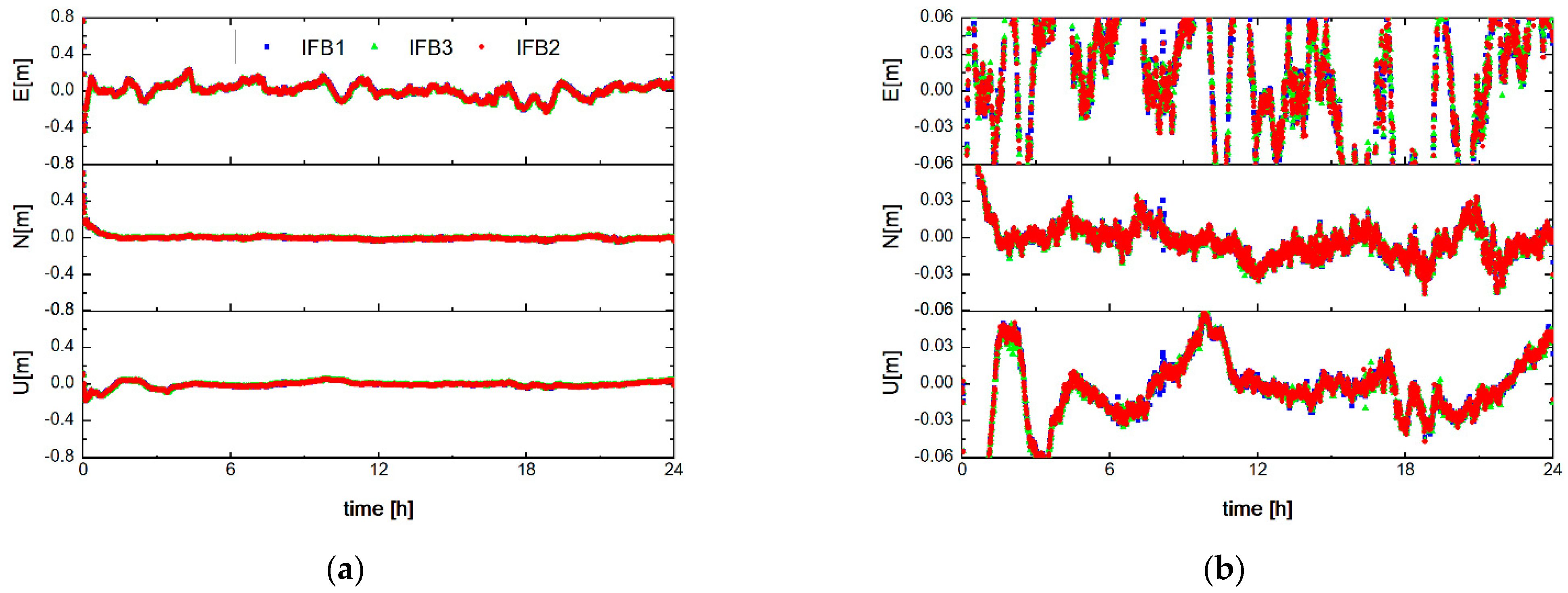
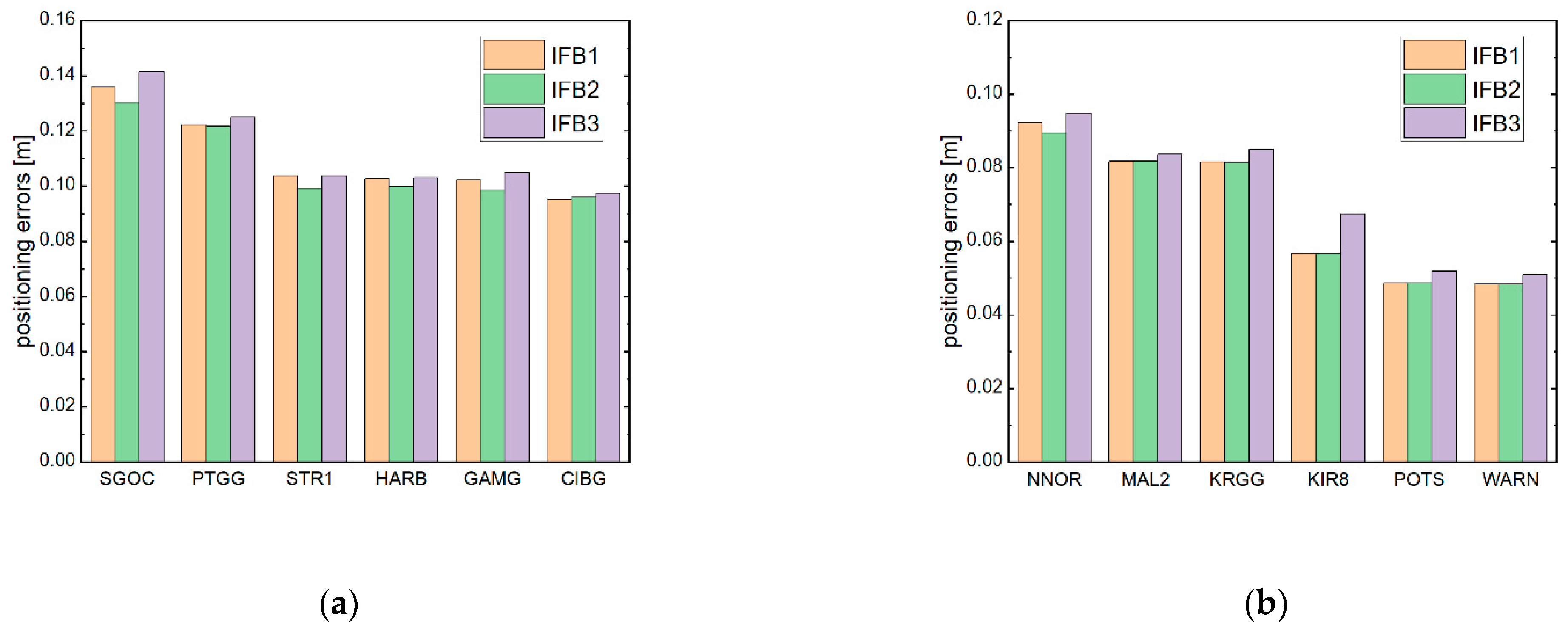
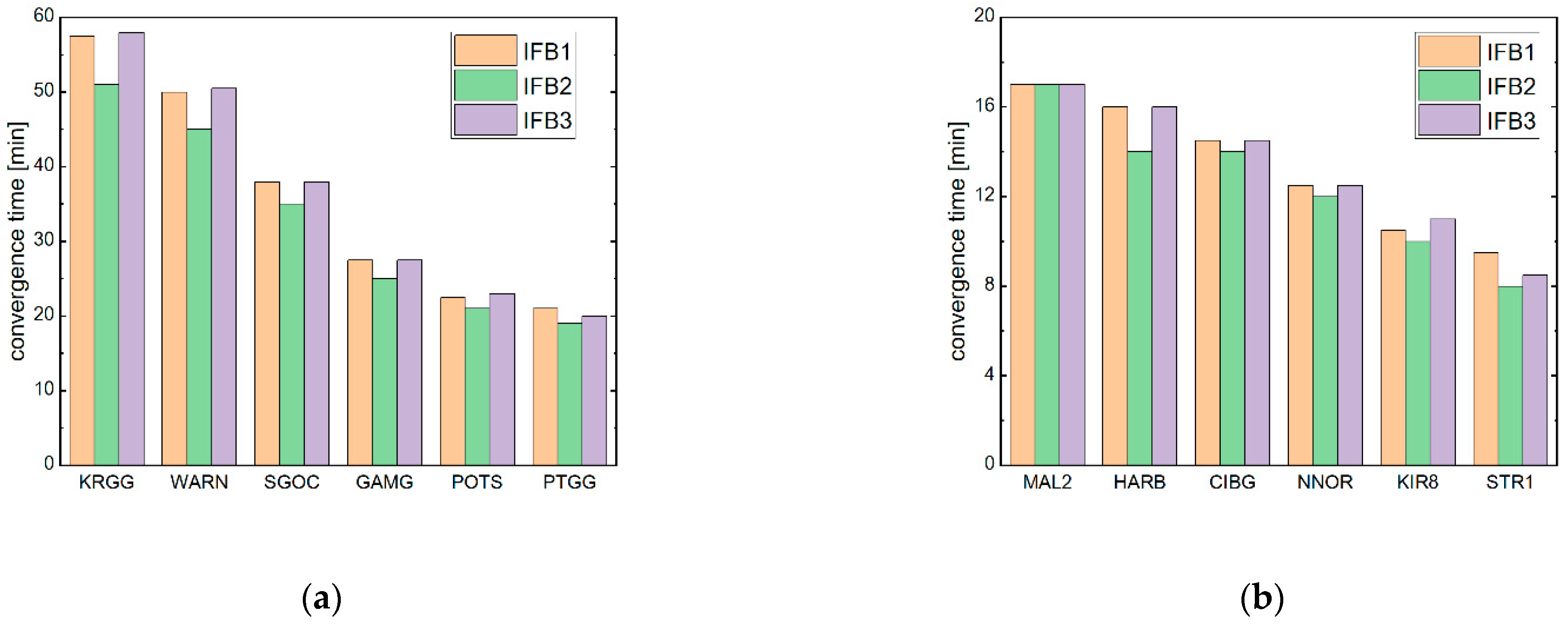
4.4. The Influence of IFB Stochastic Models on PPP Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Liu, L.; Li, J.; Yang, Y.; Zhang, T.; Mao, Y.; Sun, B.; Ren, X. Featured Services and Performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar] [CrossRef]
- Duong, V.; Harima, K.; Choy, S.; Laurichesse, D.; Rizos, C. Assessing the Performance of Multi-Frequency GPS, Galileo and BeiDou PPP Ambiguity Resolution. J. Spat. Sci. 2020, 65, 61–78. [Google Scholar] [CrossRef]
- Guo, F. Modeling and Assessment of Triple-Frequency BDS Precise Point Positioning. J. Geod. 2016, 90, 1223–1235. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. GLONASS-Based Precise Point Positioning and Performance Analysis. Adv. Space Res. 2013, 51, 514–524. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, Prospects and Challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, Q.; Li, G.; Zhang, K. Assessment of Multi-Frequency PPP Ambiguity Resolution Using Galileo and BeiDou-3 Signals. Remote Sens. 2021, 13, 4746. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial Assessment of the COMPASS/BeiDou-3: New-Generation Navigation Signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Modeling and Assessment of Five-Frequency BDS Precise Point Positioning|SpringerLink. Available online: https://link.springer.com/article/10.1186/s43020-022-00069-z (accessed on 7 June 2022).
- Li, B.; Zhang, Z.; Miao, W.; Chen, G. Improved Precise Positioning with BDS-3 Quad-Frequency Signals. Satell. Navig. 2020, 1, 1–10. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Liu, G.; Yuan, Y.; Freeshah, M.; Zhang, K.; Zhou, F. BDS Multi-Frequency PPP Ambiguity Resolution with New B2a/B2b/B2a + b Signals and Legacy B1I/B3I Signals. J. Geod. 2020, 94, 1–15. [Google Scholar] [CrossRef]
- Li, H.; Zhou, X.; Wu, B. Fast Estimation and Analysis of the Inter-Frequency Clock Bias for Block IIF Satellites. GPS Solut. 2013, 17, 347–355. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Chen, D. Integrating GPS and BDS to Shorten the Initialization Time for Ambiguity-Fixed PPP. GPS Solut. 2016, 21, 333–343. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Ge, M.; Teferle, F.N. Rapid Re-Convergences to Ambiguity-Fixed Solutions in Precise Point Positioning. J. Geod. 2010, 84, 705–714. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.; Shen, F.; Ge, Y.; Liu, C.; Zhang, S. Inter-Frequency Code Bias Handling and Estimation for Multi-Frequency BeiDou-3/Galileo Uncombined Precise Point Positioning. Meas. Sci. Technol. 2022, 33, 015012. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Liu, G.; Xie, W.; Guo, F.; Yuan, Y.; Zhang, K.; Feng, G. The Phase and Code Biases of Galileo and BDS-3 BOC Signals: Effect on Ambiguity Resolution and Precise Positioning. J. Geod. 2020, 94, 9. [Google Scholar] [CrossRef]
- Deng, Y.; Guo, F.; Ren, X.; Ma, F.; Zhang, X. Estimation and Analysis of Multi-GNSS Observable-Specific Code Biases. GPS Solut. 2021, 25, 100. [Google Scholar] [CrossRef]
- Li, M.; Yuan, Y. Estimation and Analysis of the Observable-Specific Code Biases Estimated Using Multi-GNSS Observations and Global Ionospheric Maps. Remote Sens. 2021, 13, 3096. [Google Scholar] [CrossRef]
- Li, H.; Xiao, J.; Zhu, W. Investigation and Validation of the Time-Varying Characteristic for the GPS Differential Code Bias. Remote Sens. 2019, 11, 428. [Google Scholar] [CrossRef] [Green Version]
- Fan, L.; Shi, C.; Wang, C.; Guo, S.; Wang, Z.; Jing, G. Impact of Satellite Clock Offset on Differential Code Biases Estimation Using Undifferenced GPS Triple-Frequency Observations. GPS Solut. 2020, 24, 32. [Google Scholar] [CrossRef]
- Geng, J.; Chen, X.; Pan, Y.; Zhao, Q. A Modified Phase Clock/Bias Model to Improve PPP Ambiguity Resolution at Wuhan University. J. Geod. 2019, 93, 2053–2067. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U. Comparisons of CODE and CNES/CLS GPS Satellite Bias Products and Applications in Sentinel-3 Satellite Precise Orbit Determination. GPS Solut. 2021, 25, 128. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.; Li, P.; Li, X.; Schuh, H. Influence of Stochastic Modeling for Inter-System Biases on Multi-GNSS Undifferenced and Uncombined Precise Point Positioning. GPS Solut. 2019, 23, 1–13. [Google Scholar] [CrossRef]
- Zhang, B. PPP-RTK Based on Undifferenced and Uncombined Observations: Theoretical and Practical Aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Geng, J.; Guo, J. Beyond Three Frequencies: An Extendable Model for Single-Epoch Decimeter-Level Point Positioning by Exploiting Galileo and BeiDou-3 Signals. J. Geod. 2020, 94, 14. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.; Ge, M.; Li, P.; Wickert, J.; Schuh, H. Simultaneous Estimation of GLONASS Pseudorange Inter-Frequency Biases in Precise Point Positioning Using Undifferenced and Uncombined Observations. GPS Solut. 2017, 22, 19. [Google Scholar] [CrossRef]
- Liu, G.; Guo, F.; Wang, J.; Du, M.; Qu, L. Triple-Frequency GPS Un-Differenced and Uncombined PPP Ambiguity Resolution Using Observable-Specific Satellite Signal Biases. Remote Sens. 2020, 12, 2310. [Google Scholar] [CrossRef]
- Schaer, S.; Villiger, A.; Arnold, D.; Dach, R.; Prange, L.; Jaggi, A. The CODE Ambiguity-Fixed Clock and Phase Bias Analysis Products: Generation, Properties, and Performance. J. Geod. 2021, 95, 81. [Google Scholar] [CrossRef]
- Mi, X.; Zhang, B.; Odolinski, R.; Yuan, Y. On the Temperature Sensitivity of Multi-GNSS Intra- and Inter-System Biases and the Impact on RTK Positioning. GPS Solut. 2020, 24, 112. [Google Scholar] [CrossRef]
- Yang, L.; Shen, Y.; Li, B.; Rizos, C. Simplified Algebraic Estimation for the Quality Control of DIA Estimator. J. Geod. 2021, 95, 1–15. [Google Scholar] [CrossRef]
- Teunissen, P. Distributional Theory for the DIA Method. J. Geod. 2018, 92, 59–80. [Google Scholar] [CrossRef]
- Yang, Y.; Song, L.; Xu, T. Robust Estimator for Correlated Observations Based on Bifactor Equivalent Weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Klein, I.; Matsuoka, M.T.; Guzatto, M.P.; de Souza, S.F.; Veronez, M. On Evaluation of Different Methods for Quality Control of Correlated Observations. Surv. Rev. 2015, 47, 28–35. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Receiver Type | Tracking Station Name |
|---|---|---|
| TRIMBLE | ALLOY | KRGG, CIBG, KIR8 |
| JAVAD | TRE_3 | POTS, SGOC, WARN |
| SEPT | POLARX5TR | GAMG, NNOR, HARB |
| POLARX5 | MAL2, PTGG, STR1 |
| Item | Strategy |
|---|---|
| Observation | B1I, B3I, B1C, B2a, B2b |
| Models | UC-PPP |
| Estimator | Kalman filter |
| Cut-off angle | 7° |
| Stochastic model | Elevation model |
| Satellite orbit and clock | Precise ephemeris and clock products |
| Code OSBs | OSBs file |
| Priori troposphere | Model + GMF |
| PCO/PCV | igs14_2188.atx |
| Tidal effects | Solid tides, ocean tide loading and polar tides |
| Windup effect | Corrected |
| Inter-frequency biases | IFB1: White noise (104 m2); IFB2: Random walk (9 × 10−2 m2/s); IFB3: Random constant |
| Observation | Mean (m) | RMS (m) | ||||
|---|---|---|---|---|---|---|
| IFB1 | IFB2 | IFB3 | IFB1 | IFB2 | IFB3 | |
| B1I | 0.040 | 0.040 | 0.037 | 0.314 | 0.314 | 0.316 |
| B3I | 0.006 | 0.006 | 0.006 | 0.215 | 0.214 | 0.214 |
| B1C | 0.016 | 0.016 | 0.033 | 0.215 | 0.218 | 0.223 |
| B2a | −0.017 | −0.017 | −0.027 | 0.173 | 0.175 | 0.177 |
| B2b | −0.025 | −0.025 | −0.026 | 0.223 | 0.224 | 0.228 |
| Observation | Mean (mm) | RMS (mm) | ||||
|---|---|---|---|---|---|---|
| IFB1 | IFB2 | IFB3 | IFB1 | IFB2 | IFB3 | |
| B1I | −1.07 | −1.11 | −1.10 | 8.70 | 7.04 | 8.16 |
| B3I | −0.97 | −1.01 | −1.00 | 8.77 | 7.45 | 8.20 |
| B1C | −0.93 | −0.97 | −0.97 | 8.73 | 7.43 | 8.20 |
| B2a | −1.03 | −1.07 | −1.06 | 8.66 | 7.35 | 8.13 |
| B2b | −0.88 | −0.92 | −0.91 | 8.38 | 7.01 | 7.81 |
| Station | False Alarm (%) | ||
|---|---|---|---|
| IFB1 | IFB2 | IFB3 | |
| KRGG | 0.67 | 0.45 | 1.12 |
| CIBG | 0.07 | 0.07 | 0.14 |
| KIR8 | 0.83 | 0.42 | 0.83 |
| POTS | 0.00 | 0.00 | 0.14 |
| SGOC | 11.43 | 9.87 | 12.01 |
| WARN | 0.00 | 0.00 | 0.14 |
| GAMG | 0.07 | 0.00 | 0.10 |
| NNOR | 0.94 | 0.70 | 0.94 |
| HARB | 0.07 | 0.00 | 0.17 |
| MAL2 | 6.91 | 6.77 | 7.12 |
| PTGG | 0.17 | 0.14 | 0.17 |
| STR1 | 0.07 | 0.07 | 0.14 |
| Mean | 1.77 | 1.54 | 1.92 |
| Station | E/m | N/m | U/m | ||||||
|---|---|---|---|---|---|---|---|---|---|
| IFB1 | IFB2 | IFB3 | IFB1 | IFB2 | IFB3 | IFB1 | IFB2 | IFB3 | |
| KRGG | 0.024 | 0.024 | 0.026 | 0.013 | 0.012 | 0.013 | 0.077 | 0.077 | 0.080 |
| CIBG | 0.050 | 0.050 | 0.050 | 0.026 | 0.025 | 0.025 | 0.077 | 0.078 | 0.080 |
| KIR8 | 0.024 | 0.024 | 0.030 | 0.012 | 0.012 | 0.013 | 0.050 | 0.050 | 0.059 |
| POTS | 0.019 | 0.019 | 0.019 | 0.022 | 0.022 | 0.022 | 0.039 | 0.039 | 0.043 |
| SGOC | 0.085 | 0.084 | 0.086 | 0.049 | 0.043 | 0.053 | 0.094 | 0.090 | 0.099 |
| WARN | 0.024 | 0.024 | 0.024 | 0.013 | 0.013 | 0.013 | 0.040 | 0.040 | 0.043 |
| GAMG | 0.020 | 0.020 | 0.020 | 0.035 | 0.032 | 0.035 | 0.094 | 0.091 | 0.097 |
| NNOR | 0.028 | 0.021 | 0.027 | 0.023 | 0.023 | 0.023 | 0.085 | 0.084 | 0.088 |
| HARB | 0.036 | 0.036 | 0.037 | 0.025 | 0.025 | 0.025 | 0.093 | 0.090 | 0.093 |
| MAL2 | 0.018 | 0.018 | 0.018 | 0.021 | 0.021 | 0.021 | 0.077 | 0.077 | 0.079 |
| PTGG | 0.073 | 0.072 | 0.073 | 0.021 | 0.021 | 0.022 | 0.096 | 0.096 | 0.099 |
| STR1 | 0.026 | 0.026 | 0.026 | 0.030 | 0.030 | 0.030 | 0.096 | 0.091 | 0.096 |
| Station | Convergence Time [min] | ||
|---|---|---|---|
| IFB1 | IFB2 | IFB3 | |
| KRGG | 57.5 | 51.0 | 58.0 |
| CIBG | 14.5 | 14.0 | 14.5 |
| KIR8 | 10.5 | 10.0 | 11.0 |
| POTS | 22.5 | 21.0 | 23.0 |
| SGOC | 38.0 | 35.0 | 38.0 |
| WARN | 50.0 | 45.0 | 50.5 |
| GAMG | 27.5 | 25.0 | 27.5 |
| NNOR | 12.5 | 12.0 | 12.5 |
| HARB | 16.0 | 14.0 | 16.0 |
| MAL2 | 17.0 | 17.0 | 17.0 |
| PTGG | 21.0 | 19.0 | 20.0 |
| STR1 | 9.5 | 8.0 | 8.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhou, W.; Ji, B.; Yu, D.; Bian, S.; Gu, S.; Li, D. Effect of Stochastic Modeling for Inter-Frequency Biases of Receiver on BDS-3 Five-Frequency Undifferenced and Uncombined Precise Point Positioning. Remote Sens. 2022, 14, 3595. https://doi.org/10.3390/rs14153595
Liu Y, Zhou W, Ji B, Yu D, Bian S, Gu S, Li D. Effect of Stochastic Modeling for Inter-Frequency Biases of Receiver on BDS-3 Five-Frequency Undifferenced and Uncombined Precise Point Positioning. Remote Sensing. 2022; 14(15):3595. https://doi.org/10.3390/rs14153595
Chicago/Turabian StyleLiu, Yi, Wei Zhou, Bing Ji, Deying Yu, Shaofeng Bian, Shouzhou Gu, and Deyan Li. 2022. "Effect of Stochastic Modeling for Inter-Frequency Biases of Receiver on BDS-3 Five-Frequency Undifferenced and Uncombined Precise Point Positioning" Remote Sensing 14, no. 15: 3595. https://doi.org/10.3390/rs14153595
APA StyleLiu, Y., Zhou, W., Ji, B., Yu, D., Bian, S., Gu, S., & Li, D. (2022). Effect of Stochastic Modeling for Inter-Frequency Biases of Receiver on BDS-3 Five-Frequency Undifferenced and Uncombined Precise Point Positioning. Remote Sensing, 14(15), 3595. https://doi.org/10.3390/rs14153595