
Performance Study of Landslide Detection Using Multi-Temporal SAR Images


Abstract
1. Introduction
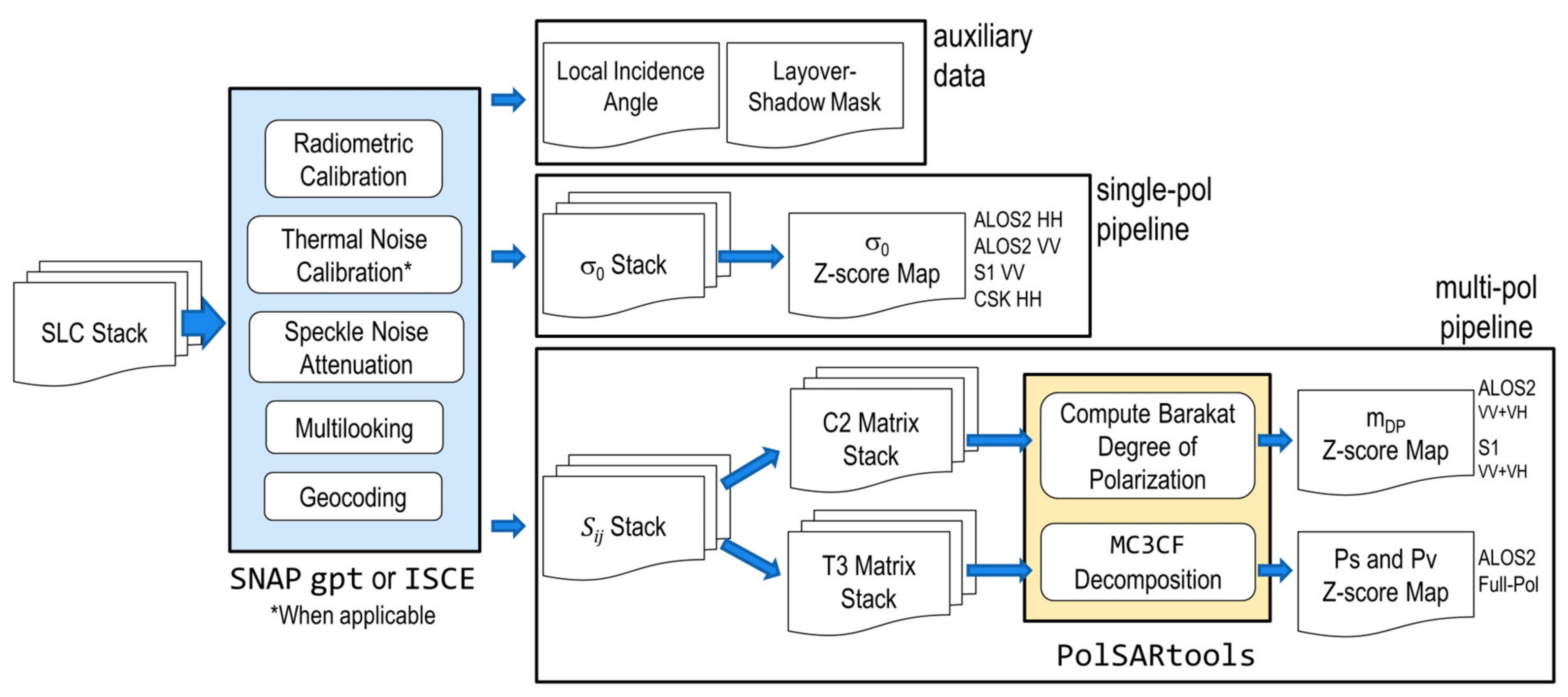
2. SAR Data Processing
2.1. Single-Polarization: Backscattering Coefficient ()
2.2. Multi-Polarization: Degree of Polarization () and Scattering Powers
2.3. Generating Z-Score Maps
3. Change Detection Method
4. Results
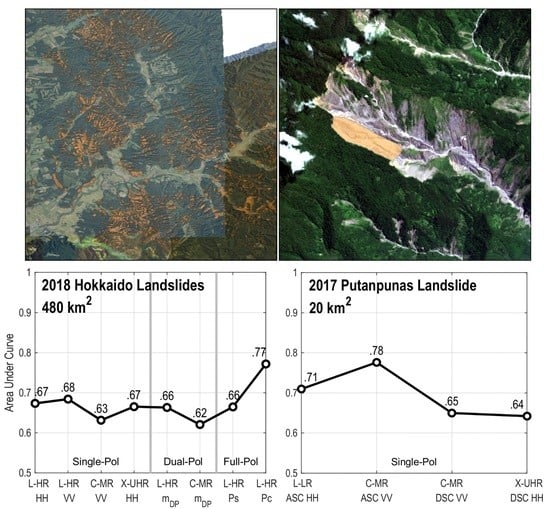
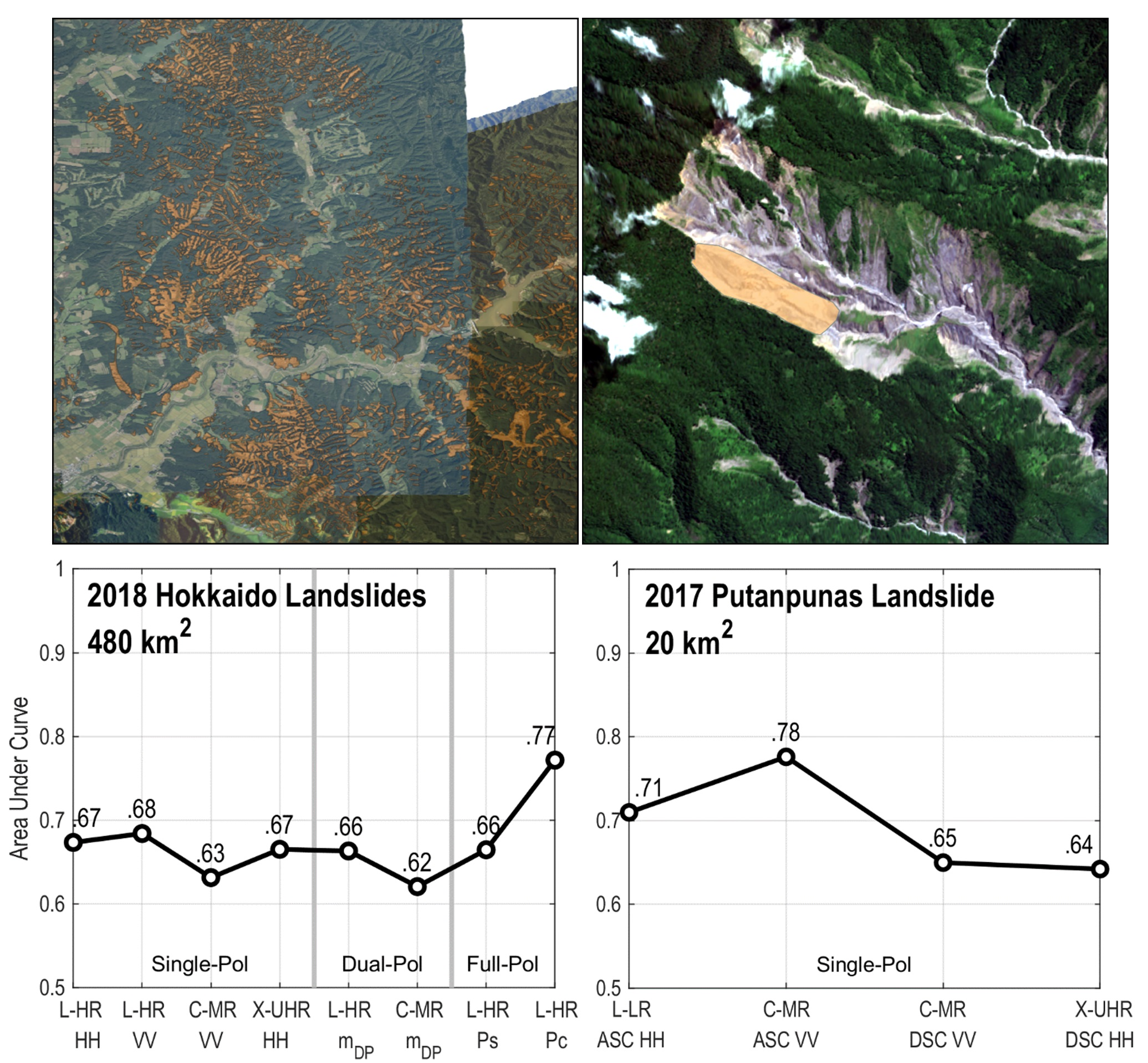
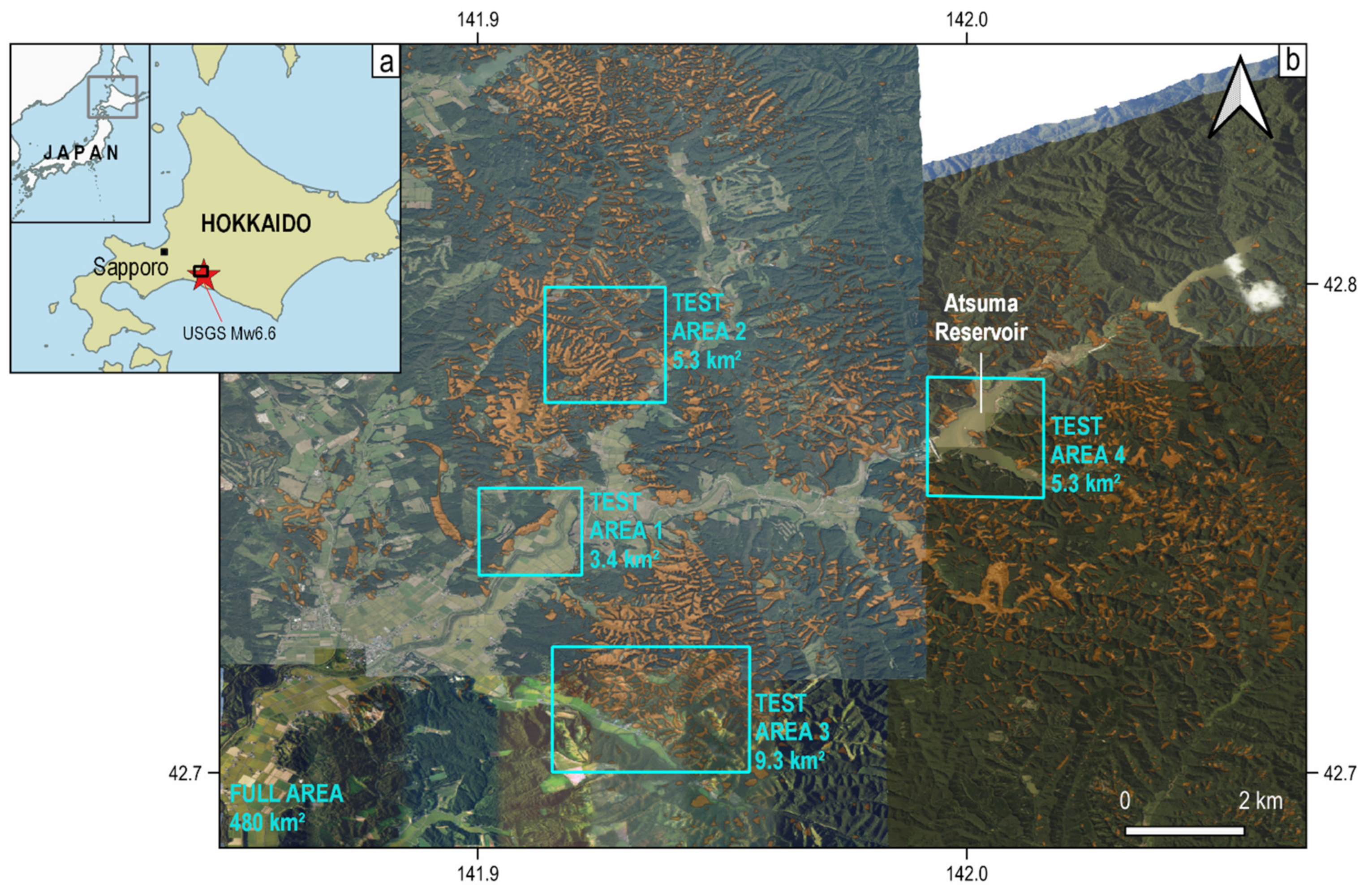
4.1. Case Study 1: Earthquake-Triggered Hokkaido Landslides in Japan
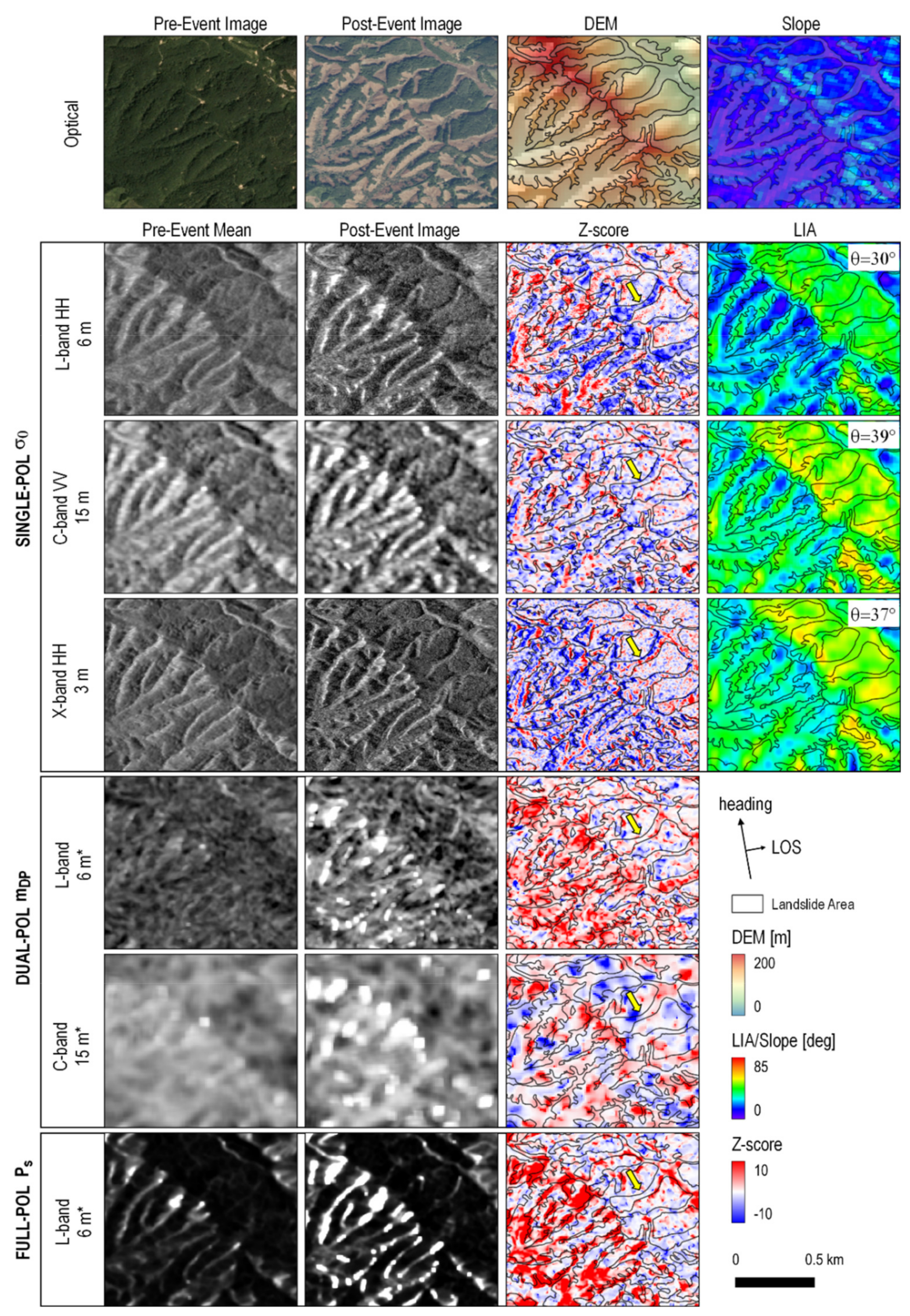
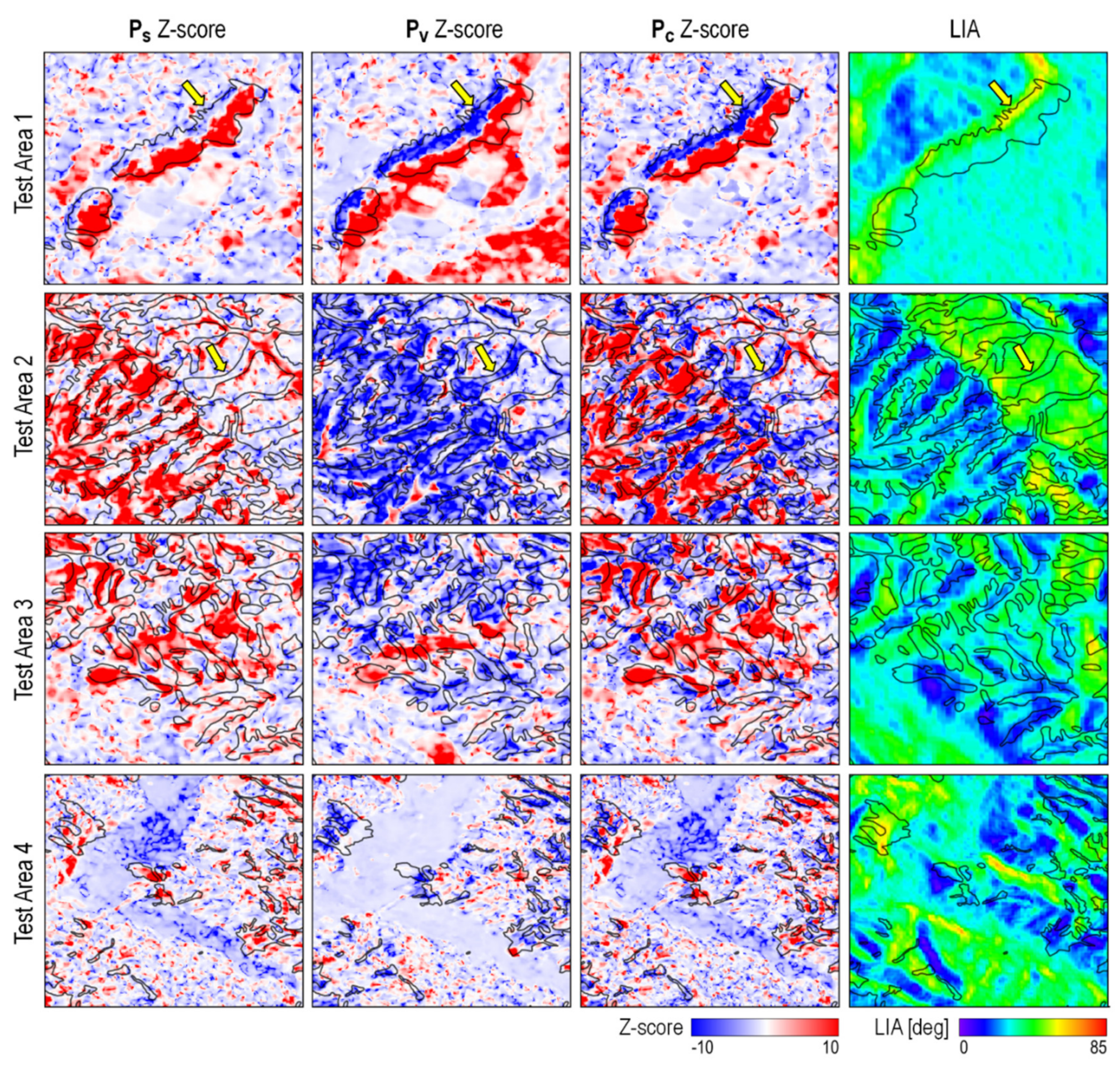
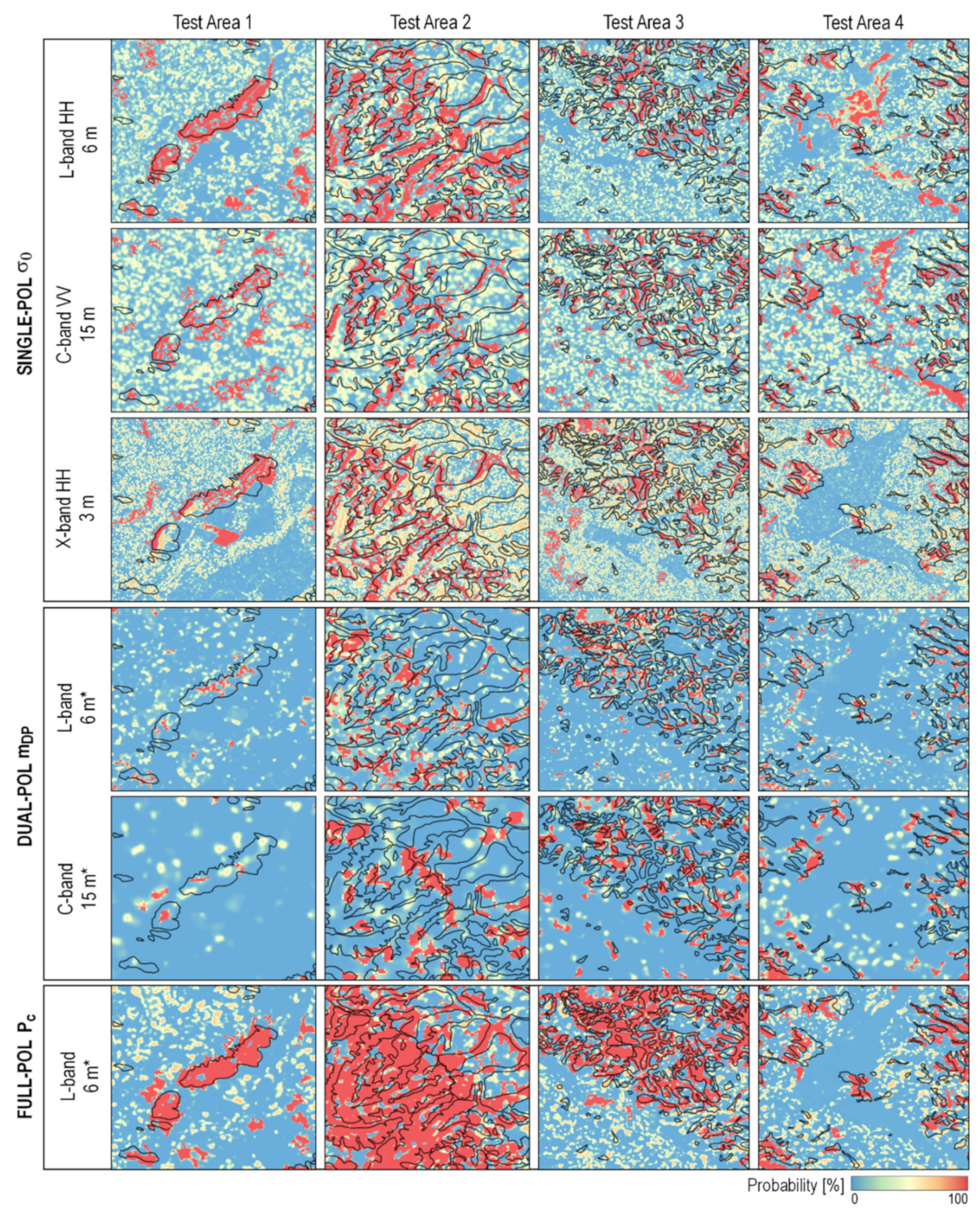
4.1.1. Qualitative Comparison
- (1)
- High-res L-band HH-pol
- (2)
- High-res L-band VV-pol
- (3)
- Medium-res C-band VV-pol
- (4)
- Ultra-high-res X-band HH-pol
- (5)
- High-res L-band dual-pol (VV + VH)
- (6)
- Medium-res C-band dual-pol (VV + VH)
- (7)
- High-res L-band full-pol
- (8)
- High-res L-band full-pol (denoted as datatype hereafter)
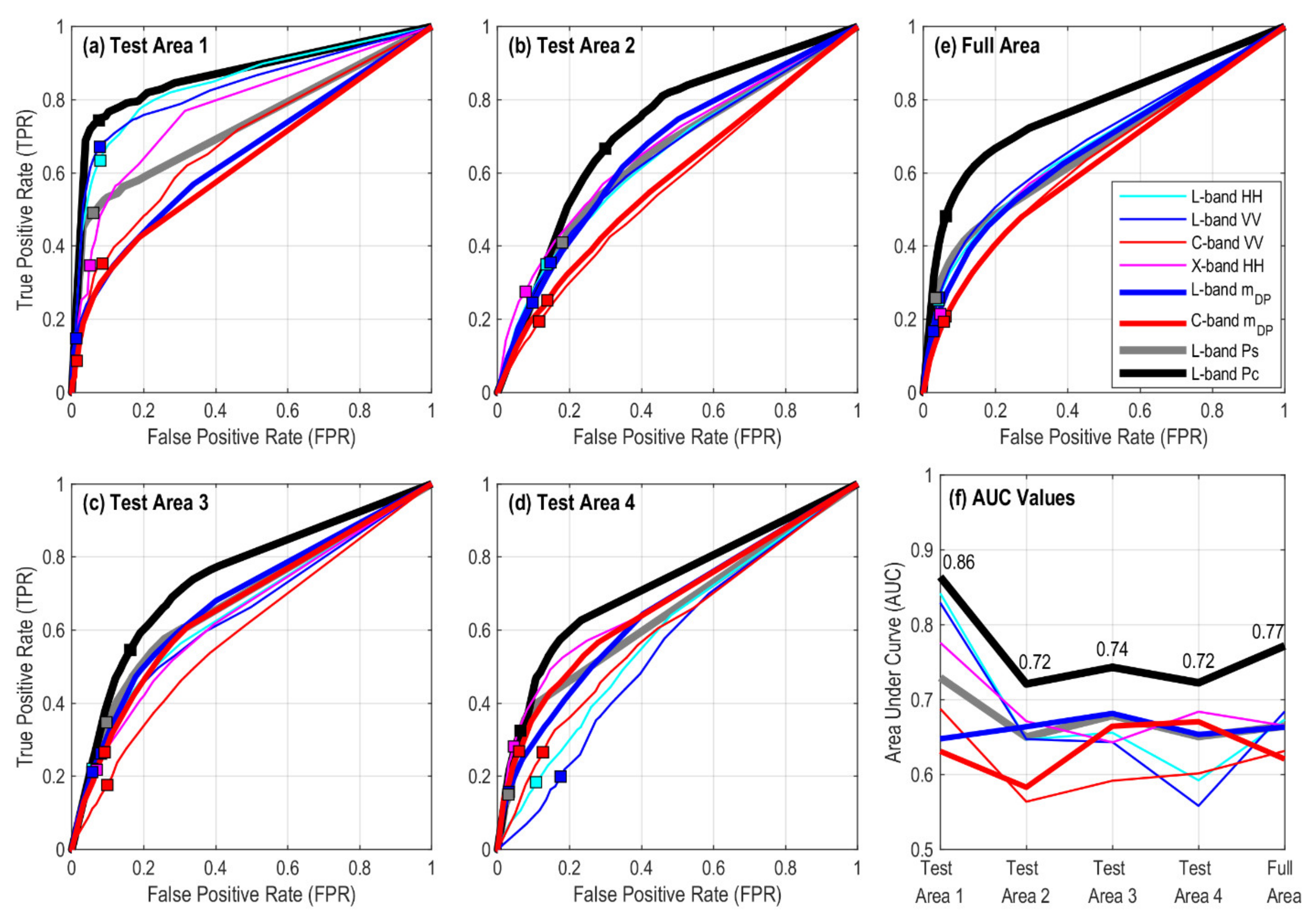
4.1.2. Quantitative Comparison
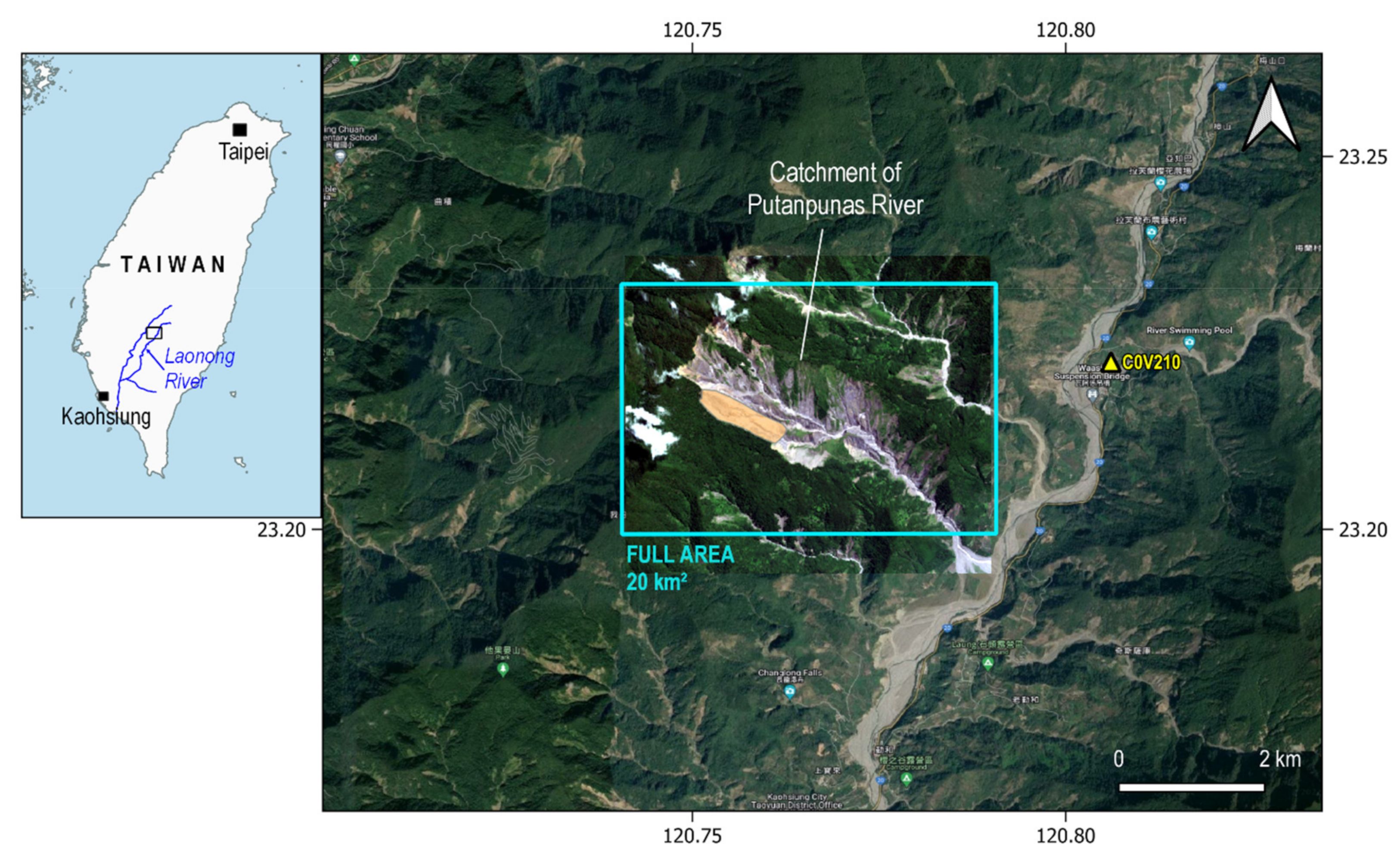
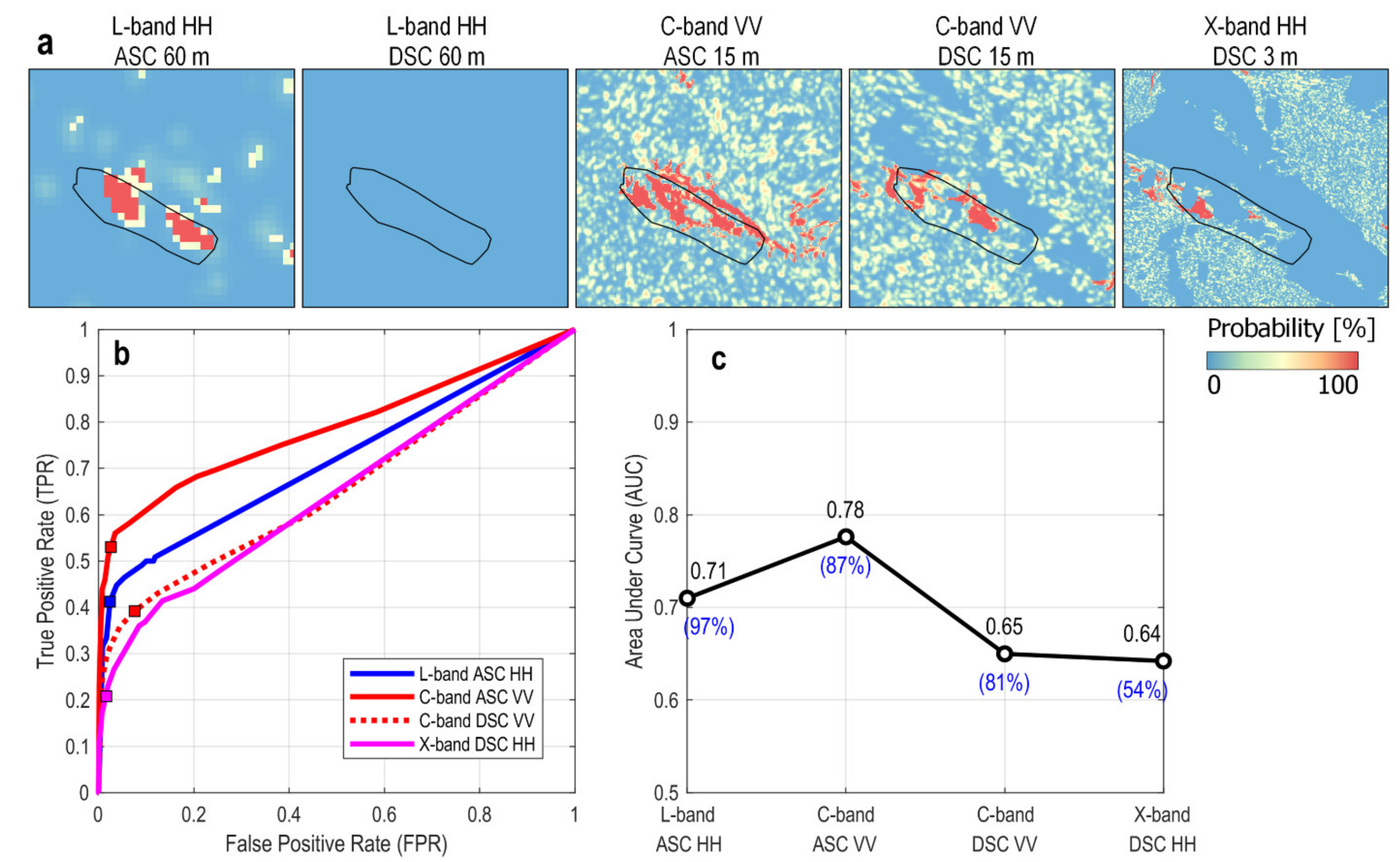
4.2. Case Study 2: Rainfall-Triggered Putanpunas Landslide in Southern Taiwan
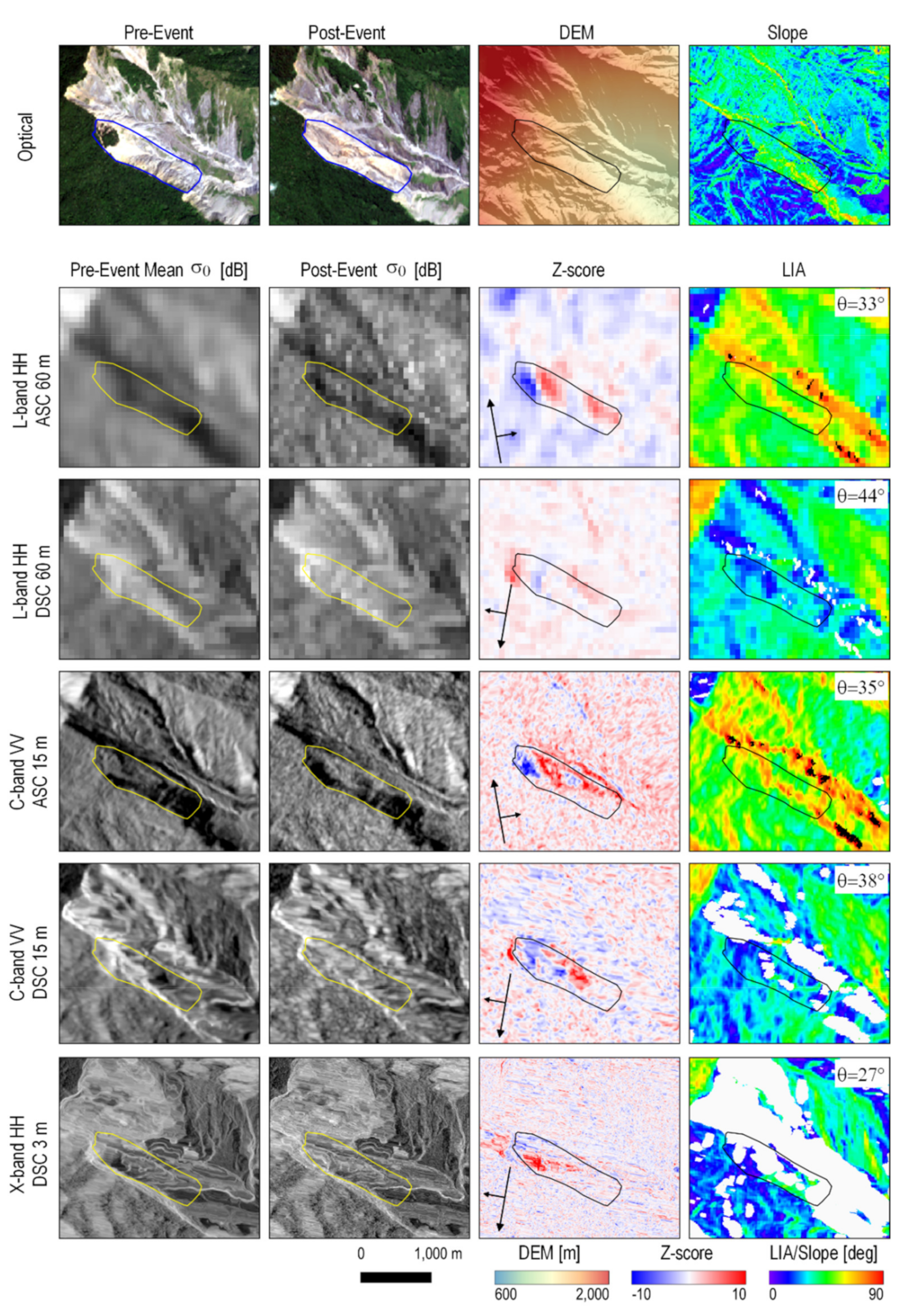
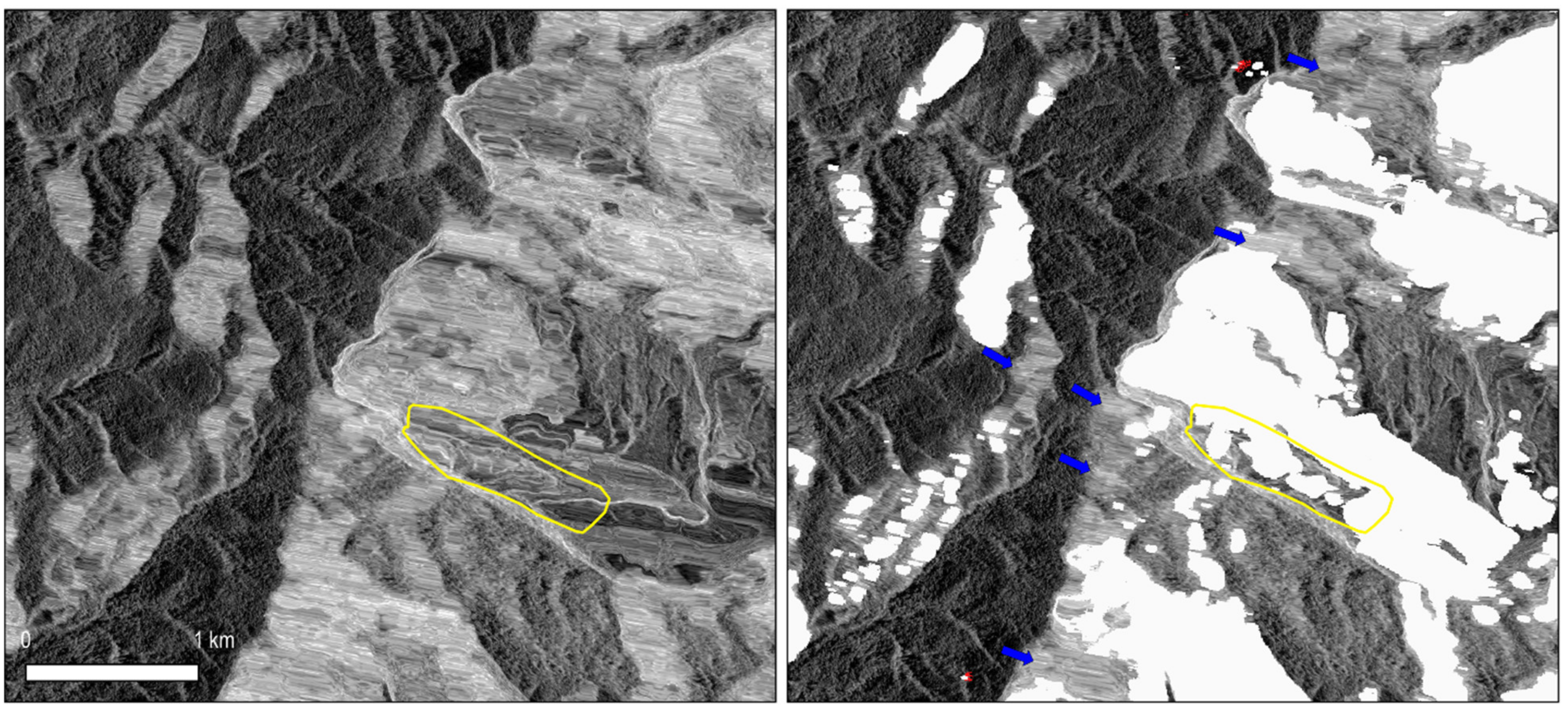
4.2.1. Qualitative Comparison
- (1)
- Low-res L-band HH-pol , ascending
- (2)
- Low-res L-band HH-pol , descending
- (3)
- Medium-res C-band VV-pol , ascending
- (4
- Medium-res C-band VV-pol , descending
- (5)
- Ultra-high-res X-band, HH-pol , descending
4.2.2. Quantitative Comparison
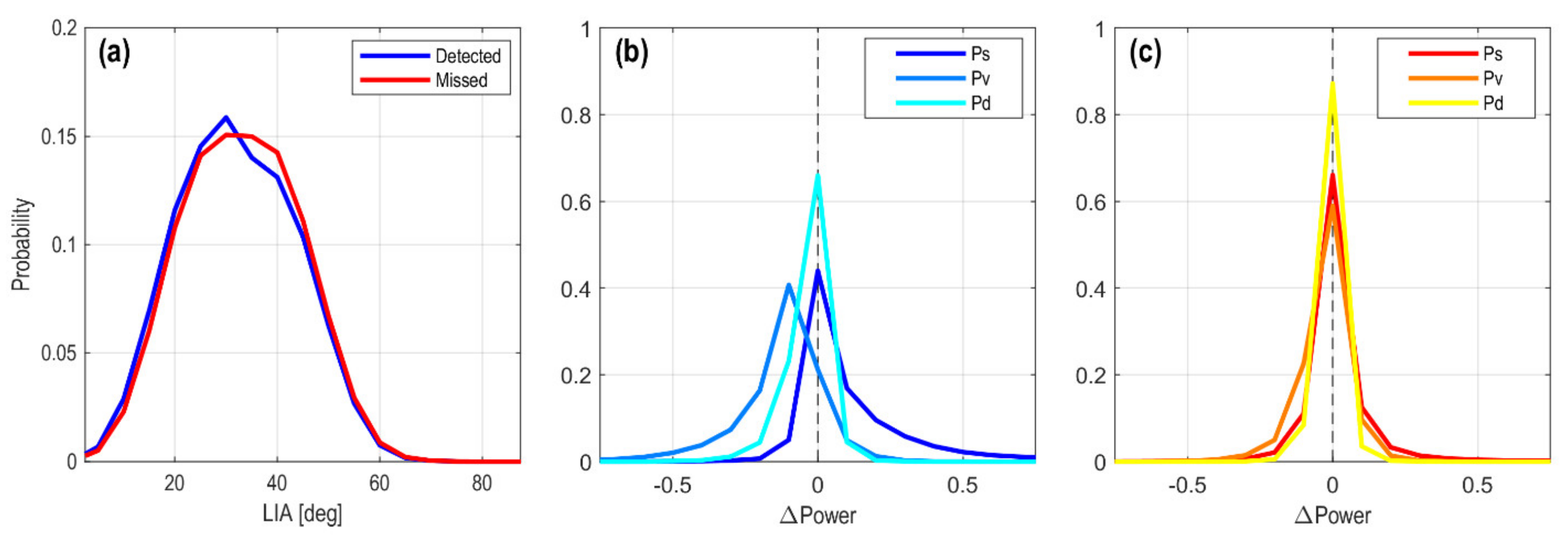
5. Discussion
5.1. How Data Properties Affect Detection Performance
5.2. Limitations in SAR-Based Landslide Detection
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
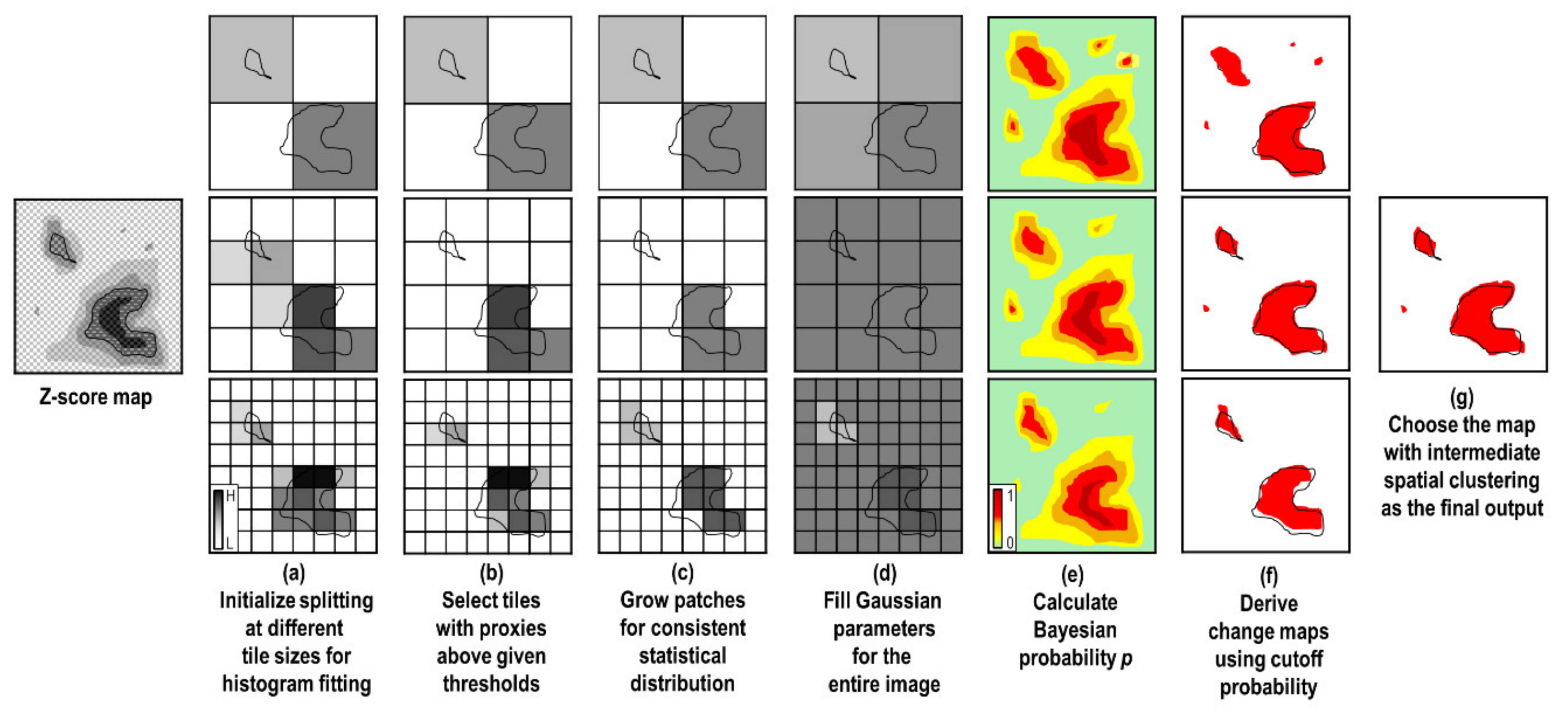
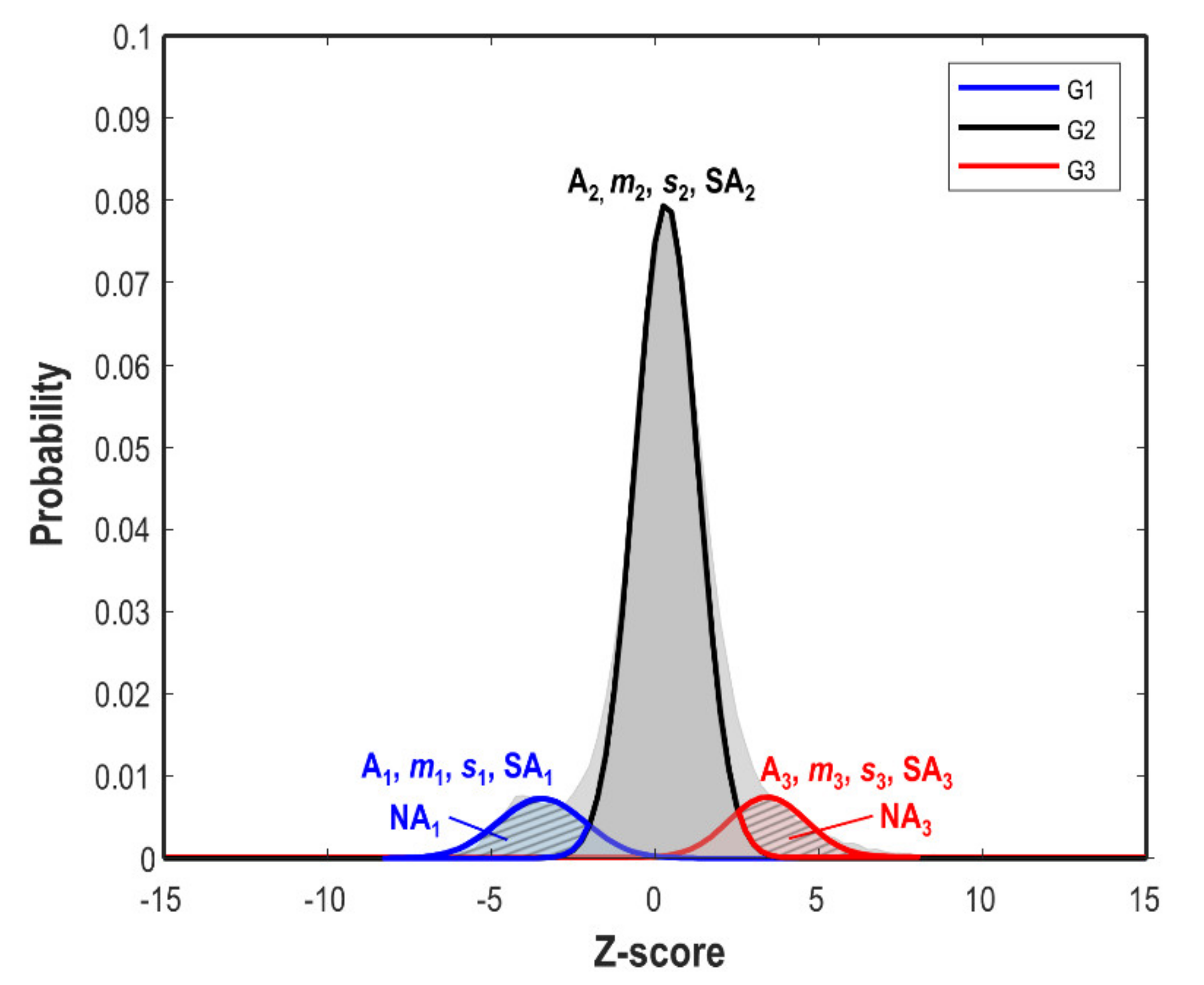
Appendix A. GSBA Algorithm
- (a)
- Initialize splitting and histogram fitting

- (b)
- Select tiles using thresholds
- i.
- Ashman D coefficient (AD). It represents the separation between two modes. The value is defined as [60]:
- ii.
- Bhattacharyya coefficient (BC). It represents the goodness of fit in terms of probability. It is defined as [61]:where stands for the -th histogram bin.
- iii.
- iv.
- Non-overlapping Ratio (NR). It represents the significance of the changes in terms of the cumulative probability that is not overlapped with the unchanged class (). It is defined as:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ashman D Coeff. () | >1.9 |
| Bhattacharyya Coeff. () | >0.98 |
| Surface Ratio () | >0.05 |
| Non-overlapping Ratio () | >0.4 |
- (c)
- Grow patches for consistent statistical distribution
- (d)
- Fill Gaussian parameters
- (e)
- Calculate Bayesian probability
- (f)
- Derive binary change maps
- (g)
- Choose the final change map
References
- Froude, M.J.; Petley, D.N. Global fatal landslide occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Petley, D.N. On the impact of climate change and population growth on the occurrence of fatal landslides in South, East and SE Asia. Q. J. Eng. Geol. Hydrogeol. 2010, 43, 487–496. [Google Scholar] [CrossRef]
- Lin, Y.N.; Park, E.; Wang, Y.; Quek, Y.P.; Lim, J.; Alcantara, E.; Loc, H.H. The 2020 Hpakant Jade Mine Disaster, Myanmar: A multi-sensor investigation for slope failure. ISPRS J. Photogramm. Remote Sens. 2021, 177, 291–305. [Google Scholar] [CrossRef]
- Lin, S.C.; Ke, M.C.; Lo, C.M. Evolution of landslide hotspots in Taiwan. Landslides 2017, 14, 1491–1501. [Google Scholar] [CrossRef]
- Hovius, N.; Stark, C.P.; Chu, H.-T.; Lin, J.-C. Supply and Removal of Sediment in a Landslide-Dominated Mountain Belt: Central Range, Taiwan. J. Geol. 2000, 108, 73–89. [Google Scholar] [CrossRef]
- Dadson, S.J.; Hovius, N.; Chen, H.; Dade, W.B.; Hsieh, M.-L.; Willett, S.D.; Hu, J.-C.; Horng, M.-J.; Chen, M.-C.; Stark, C.P.; et al. Links between erosion, runoff variability and seismicity in the Taiwan orogen. Nature 2003, 426, 648. [Google Scholar] [CrossRef]
- Geertsema, M.; Pojar, J.J. Influence of landslides on biophysical diversity—A perspective from British Columbia. Geomorphology 2007, 89, 55–69. [Google Scholar] [CrossRef]
- Natsuki, S.; Toshihiko, S. Distribution and Development Processes of Wetlands on Landslides in the Hachimantai Volcanic Group, NE Japan. Geogr. Rev. Jpn. Ser. B 2015, 87, 103–114. [Google Scholar] [CrossRef][Green Version]
- Czuchlewski, K.R.; Weissel, J.K.; Kim, Y. Polarimetric synthetic aperture radar study of the Tsaoling landslide generated by the 1999 Chi-Chi earthquake, Taiwan. J. Geophys. Res. Earth Surf. 2003, 108, 1–11. [Google Scholar] [CrossRef]
- Burrows, K.; Walters, R.J.; Milledge, D.; Densmore, A.L. A systematic exploration of satellite radar coherence methods for rapid landslide detection. Nat. Hazards Earth Syst. Sci. 2020, 20, 3197–3214. [Google Scholar] [CrossRef]
- Yun, S.-H.; Hudnut, K.; Owen, S.; Webb, F.; Simons, M.; Sacco, P.; Gurrola, E.; Manipon, G.; Liang, C.; Fielding, E.; et al. Rapid Damage Mapping for the 2015 Mw 7.8 Gorkha Earthquake Using Synthetic Aperture Radar Data from COSMO-SkyMed and ALOS-2 Satellites. Seismol. Res. Lett. 2015, 86, 1549–1556. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, S.; Wang, X.; Lindsey, E.O.; Tongkul, F.; Tapponnier, P.; Bradley, K.; Chan, C.-H.; Hill, E.M.; Sieh, K. The 2015 M w 6.0 Mt. Kinabalu earthquake: An infrequent fault rupture within the Crocker fault system of East Malaysia. Geosci. Lett. 2017, 4, 6. [Google Scholar] [CrossRef]
- Aimaiti, Y.; Liu, W.; Yamazaki, F.; Maruyama, Y. Earthquake-Induced Landslide Mapping for the 2018 Hokkaido Eastern Iburi Earthquake Using PALSAR-2 Data. Remote Sens. 2019, 11, 2351. [Google Scholar] [CrossRef]
- Fujiwara, S.; Nakano, T.; Morishita, Y.; Kobayashi, T.; Yarai, H.; Une, H.; Hayashi, K. Detection and interpretation of local surface deformation from the 2018 Hokkaido Eastern Iburi Earthquake using ALOS-2 SAR data. Earth Planets Space 2019, 71, 64. [Google Scholar] [CrossRef]
- Jung, J.; Yun, S.-H. Evaluation of Coherent and Incoherent Landslide Detection Methods Based on Synthetic Aperture Radar for Rapid Response: A Case Study for the 2018 Hokkaido Landslides. Remote Sens. 2020, 12, 265. [Google Scholar] [CrossRef]
- Ohki, M.; Abe, T.; Tadono, T.; Shimada, M. Landslide detection in mountainous forest areas using polarimetry and interferometric coherence. Earth Planets Space 2020, 72, 67. [Google Scholar] [CrossRef]
- Ge, P.; Gokon, H.; Meguro, K.; Koshimura, S. Study on the Intensity and Coherence Information of High-Resolution ALOS-2 SAR Images for Rapid Massive Landslide Mapping at a Pixel Level. Remote Sens. 2019, 11, 2808. [Google Scholar] [CrossRef]
- Lin, S.-Y.; Lin, C.-W.; van Gasselt, S. Processing Framework for Landslide Detection Based on Synthetic Aperture Radar (SAR) Intensity-Image Analysis. Remote Sens. 2021, 13, 644. [Google Scholar] [CrossRef]
- Konishi, T.; Suga, Y. Landslide detection using COSMO-SkyMed images: A case study of a landslide event on Kii Peninsula, Japan. Eur. J. Remote Sens. 2018, 51, 205–221. [Google Scholar] [CrossRef]
- Mondini, C.A. Measures of Spatial Autocorrelation Changes in Multitemporal SAR Images for Event Landslides Detection. Remote Sens. 2017, 9, 554. [Google Scholar] [CrossRef]
- Jung, J.; Yun, S.; Kim, D.; Lavalle, M. Damage-mapping algorithm based on coherence model using multitemporal polarimetric—Interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1520–1532. [Google Scholar] [CrossRef]
- Mondini, A.C.; Santangelo, M.; Rocchetti, M.; Rossetto, E.; Manconi, A.; Monserrat, O. Sentinel-1 SAR Amplitude Imagery for Rapid Landslide Detection. Remote Sens. 2019, 11, 760. [Google Scholar] [CrossRef]
- Shibayama, T.; Yamaguchi, Y.; Yamada, H. Polarimetric Scattering Properties of Landslides in Forested Areas and the Dependence on the Local Incidence Angle. Remote Sens. 2015, 7, 15424–15442. [Google Scholar] [CrossRef]
- Plank, S.; Twele, A.; Martinis, S. Landslide Mapping in Vegetated Areas Using Change Detection Based on Optical and Polarimetric SAR Data. Remote Sens. 2016, 8, 307. [Google Scholar] [CrossRef]
- Niu, C.; Zhang, H.; Liu, W.; Li, R.; Hu, T. Using a fully polarimetric SAR to detect landslide in complex surroundings: Case study of 2015 Shenzhen landslide. ISPRS J. Photogramm. Remote Sens. 2021, 174, 56–67. [Google Scholar] [CrossRef]
- Miranda, N.; Meadows, P.J. Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF; ESA-EOPG-CSCOP-TN-0002; European Space Agency: Paris, France, 2015. [Google Scholar]
- Jong-Sen, L.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Piantanida, R.; Miranda, N.; Franceschi, N.; Meadows, P. Thermal Denoising of Products Generated by the S-1 IPF; S-1 Mission Performance Centre: Ramonville-Saint-Agne, France, 2017. [Google Scholar]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Schreier, G. SAR Geocoding: Data and Systems; Schreier, G., Ed.; Wichmann: Karlsruhe, Germany, 1993. [Google Scholar]
- Cloude, S. The dual polarization entropy/alpha decomposition: A PALSAR case study. Sci. Appl. SAR Polarim. Polarim. Interferom. 2007, 644, 2. [Google Scholar]
- Barakat, R. Degree of polarization and the principal idempotents of the coherency matrix. Opt. Commun. 1977, 23, 147–150. [Google Scholar] [CrossRef]
- Mandal, D.; Kumar, V.; Ratha, D.; Dey, S.; Bhattacharya, A.; Lopez-Sanchez, J.M.; McNairn, H.; Rao, Y.S. Dual polarimetric radar vegetation index for crop growth monitoring using sentinel-1 SAR data. Remote Sens. Environ. 2020, 247, 111954. [Google Scholar] [CrossRef]
- Dey, S.; Bhattacharya, A.; Ratha, D.; Mandal, D.; Frery, A.C. Target Characterization and Scattering Power Decomposition for Full and Compact Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3981–3998. [Google Scholar] [CrossRef]
- Lin, N.Y.; Yun, S.-H.; Bhardwaj, A.; Hill, M.E. Urban Flood Detection with Sentinel-1 Multi-Temporal Synthetic Aperture Radar (SAR) Observations in a Bayesian Framework: A Case Study for Hurricane Matthew. Remote Sens. 2019, 11, 1778. [Google Scholar] [CrossRef]
- Hostache, R.; Matgen, P.; Wagner, W. Change detection approaches for flood extent mapping: How to select the most adequate reference image from online archives? Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 205–213. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A Split-Based Approach to Unsupervised Change Detection in Large-Size Multitemporal Images: Application to Tsunami-Damage Assessment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1658–1670. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A detail-preserving scale-driven approach to change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2963–2972. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Young, T.Y.; Coraluppi, G. Stochastic estimation of a mixture of normal density functions using an information criterion. IEEE Trans. Inf. Theory 1970, 16, 258–263. [Google Scholar] [CrossRef]
- Chow, C.K.; Kaneko, T. Automatic boundary detection of the left ventricle from cineangiograms. Comput. Biomed. Res. 1972, 5, 388–410. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A hierarchical split-based approach for parametric thresholding of SAR images: Flood inundation as a test case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Marzano, F.S.; Pierdicca, N.; Mori, S.; Chini, M. Discrimination of Water Surfaces, Heavy Rainfall, and Wet Snow Using COSMO-SkyMed Observations of Severe Weather Events. IEEE Trans. Geosci. Remote Sens. 2014, 52, 858–869. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Kavetski, D.; Chini, M.; Corato, G.; Schlaffer, S.; Matgen, P. Probabilistic Flood Mapping Using Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6958–6969. [Google Scholar] [CrossRef]
- Park, S.; Moon, W.M.; Pottier, E. Assessment of Scattering Mechanism of Polarimetric SAR Signal from Mountainous Forest Areas. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4711–4719. [Google Scholar] [CrossRef]
- Chao, W.-A.; Wu, Y.-M.; Zhao, L.; Chen, H.; Chen, Y.-G.; Chang, J.-M.; Lin, C.-M. A first near real-time seismology-based landquake monitoring system. Sci. Rep. 2017, 7, 43510. [Google Scholar] [CrossRef]
- Lo, C.-M. Evolution of deep-seated landslide at Putanpunas stream, Taiwan. Geomat. Nat. Hazards Risk 2017, 8, 1204–1224. [Google Scholar] [CrossRef]
- Chen, X.; Sun, Q.; Hu, J. Generation of Complete SAR Geometric Distortion Maps Based on DEM and Neighbor Gradient Algorithm. Appl. Sci. 2018, 8, 2206. [Google Scholar] [CrossRef]
- Comert, R. Investigation of the Effect of the Dataset Size and Type in the Earthquake-Triggered Landslides Mapping: A Case Study for the 2018 Hokkaido Iburu Landslides. Front. Earth Sci. 2021, 9, 23. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef]
- Ito, Y.; Yamazaki, S.; Kurahashi, T. Geological features of landslides caused by the 2018 Hokkaido Eastern Iburi Earthquake in Japan. In Characterization of Modern and Historical Seismic-Tsunamic Events and Their Global—Societal Impacts; Dilek, Y., Ogawa, Y., Okubo, Y., Eds.; Special Publications; The Geological Society: London, UK, 2020; Volume 501, pp. 171–183. [Google Scholar]
- Kawamura, S.; Kawajiri, S.; Hirose, W.; Watanabe, T. Slope failures/landslides over a wide area in the 2018 Hokkaido Eastern Iburi earthquake. Soils Found. 2019, 59, 2376–2395. [Google Scholar] [CrossRef]
- Kameda, J.; Kamiya, H.; Masumoto, H.; Morisaki, T.; Hiratsuka, T.; Inaoi, C. Fluidized landslides triggered by the liquefaction of subsurface volcanic deposits during the 2018 Iburi-Tobu earthquake, Hokkaido. Sci. Rep. 2019, 9, 13119. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Che, A.; Wang, L.; Wang, L. Investigation and mechanism analysis of disasters under Hokkaido Eastern Iburi earthquake. Geomat. Nat. Hazards Risk 2021, 12, 1–28. [Google Scholar] [CrossRef]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Ashman, K.M.; Bird, C.M.; Zepf, S.E. Detecting Bimodality in Astronomical Datasets. Astron. J. 1994, 108, 2348. [Google Scholar] [CrossRef]
- Bhattacharyya, A. On a Measure of Divergence between Two Multinomial Populations. Sankhyā Indian J. Stat. 1946, 7, 401–406. [Google Scholar]
- Ripley, B.D. Spatial Statistics; Wiley: Hoboken, NJ, USA, 1981. [Google Scholar] [CrossRef]
- Dixon, P.M. Ripley’s K function. In Encyclopedia of Environmetrics; El-Shaarawi, A.H., Piegorsch, W.W., Eds.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2002; Volume 3, pp. 1796–1803. [Google Scholar]












| Sensor & Track *1 | Pre-Event Epochs | Post-Event Epoch | Average Look Angle () | Mode and Resolution *2 | Wavelength | Polarization *3 |
|---|---|---|---|---|---|---|
| Hokkaido Landslides (Japan), 2018-09-06, earthquake-triggered | ||||||
| ALOS-2 A122 | 2018-08-25 2017-08-26 2016-08-27 | 2018-09-08 | 30° | High-Sensitive 6 m (HR) | L-band 22.9 cm | Full-pol HH, HV, VV, VH |
| S-1 A68 | 2018-09-01 2018-08-20 2018-08-08 | 2018-09-13 | 39° | Interferometric Wide 15 m (MR) | C-band 5.6 cm | Dual-pol VV, VH |
| CSK A | 2018-06-04 2017-07-16 | 2018-09-08 | 37° | StripMap 3 m (UHR) | X-band 3.1 cm | Single-pol HH |
| Putanpunas Landslide (southern Taiwan), 2017-06-07, rainfall-triggered | ||||||
| ALOS-2 A137 | 2016-12-22 2016-08-18 2016-06-09 2016-04-14 2016-03-03 | 2017-08-03 | 33° | ScanSAR 60 m (LR) | L-band 22.9 cm | Dual-pol HH, HV (HV-mode is missing on the post-event epoch) |
| ALOS-2 D27 | 2017-05-21 2017-04-23 2017-01-01 2016-12-04 2016-10-09 | 2017-07-02 | 44° | ScanSAR 60 m (LR) | L-band 22.9 cm | Dual-pol HH, HV |
| S-1 A69 | 2017-05-27 2017-05-15 2017-05-03 2017-04-21 2017-04-09 | 2017-06-08 | 35° | Interferometric Wide 15 m (MR) | C-band 5.6 cm | Dual-pol VV, VH |
| S-1 D105 | 2017-05-29 2017-05-17 2017-05-05 2017-04-23 2017-04-11 | 2017-06-10 | 38° | Interferometric Wide 15 m (MR) | C-band 5.6 cm | Dual-pol VV,VH |
| CSK D | 2017-06-01 2017-05-24 2017-05-08 2017-04-22 2017-04-14 | 2017-06-09 | 27° | StripMap 3 m (UHR) | X-band 3.1 cm | Single-pol HH |
| Event and AOI Area | Sensor-Track | Datatype *1 | AUC | OA | TPRFPR = 0.1 *2 | Ae *3 Ratio | ||
|---|---|---|---|---|---|---|---|---|
| Hokkaido 480 km2 | ALOS-2 A122 | Single-pol HR L-band | HH | 0.67 | 0.89 | 0.37 | (0.66) | 0.99 |
| Single-pol HR L-band | VV | 0.68 | 0.89 | 0.39 | (0.70) | 0.99 | ||
| Dual-pol HR L-band | VV + VH | 0.65 | 0.89 | 0.42 | (0.75) | 0.99 | ||
| Full-pol HR L-band | 0.66 | 0.90 | 0.40 | (0.71) | 0.99 | |||
| Full-pol HR L-band | Z-score | 0.77 | 0.90 | 0.56 | (1.00) | 0.99 | ||
| S-1 A68 | Single-pol MR C-band | VV | 0.63 | 0.87 | 0.27 | (0.48) | 0.99 | |
| Dual-pol MR C-band | VV + VH | 0.62 | 0.87 | 0.27 | (0.48) | 0.99 | ||
| CSK-A | Single-pol UHR X-band | HH | 0.67 | 0.88 | 0.34 | (0.61) | 0.99 | |
| Putanpunas 20 km2 | ALOS-2 A137 | Single-pol LR L-band | HH | 0.71 | 0.98 | 0.50 | 0.97 | |
| ALOS-2 D27 | Single-pol LR L-band | HH | - | - | - | 0.97 | ||
| S-1 A69 | Single-pol MR C-band | VV | 0.78 | 0.92 | 0.61 | 0.87 | ||
| S-1 D105 | Single-pol MR C-band | VV | 0.65 | 0.90 | 0.41 | 0.81 | ||
| CSK-D | Single-pol UHR X-band | HH | 0.64 | 0.98 | 0.37 | 0.54 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.N.; Chen, Y.-C.; Kuo, Y.-T.; Chao, W.-A. Performance Study of Landslide Detection Using Multi-Temporal SAR Images. Remote Sens. 2022, 14, 2444. https://doi.org/10.3390/rs14102444
Lin YN, Chen Y-C, Kuo Y-T, Chao W-A. Performance Study of Landslide Detection Using Multi-Temporal SAR Images. Remote Sensing. 2022; 14(10):2444. https://doi.org/10.3390/rs14102444
Chicago/Turabian StyleLin, Yunung Nina, Yi-Ching Chen, Yu-Ting Kuo, and Wei-An Chao. 2022. "Performance Study of Landslide Detection Using Multi-Temporal SAR Images" Remote Sensing 14, no. 10: 2444. https://doi.org/10.3390/rs14102444
APA StyleLin, Y. N., Chen, Y.-C., Kuo, Y.-T., & Chao, W.-A. (2022). Performance Study of Landslide Detection Using Multi-Temporal SAR Images. Remote Sensing, 14(10), 2444. https://doi.org/10.3390/rs14102444