Abstract
Recent advances in search and rescue methods include the use of unmanned aerial vehicles (UAVs), to carry out aerial monitoring of terrains to spot lost individuals. To date, such searches have been conducted by human observers who view UAV-acquired videos or images. Alternatively, lost persons may be detected by automated algorithms. Although some algorithms are implemented in software to support search and rescue activities, no successful rescue case using automated human detectors has been reported on thus far in the scientific literature. This paper presents a report from a search and rescue mission carried out by Bieszczady Mountain Rescue Service near the village of Cergowa in SE Poland, where a 65-year-old man was rescued after being detected via use of SARUAV software. This software uses convolutional neural networks to automatically locate people in close-range nadir aerial images. The missing man, who suffered from Alzheimer’s disease (as well as a stroke the previous day) spent more than 24 h in open terrain. SARUAV software was allocated to support the search, and its task was to process 782 nadir and near-nadir JPG images collected during four photogrammetric flights. After 4 h 31 min of the analysis, the system successfully detected the missing person and provided his coordinates (uploading 121 photos from a flight over a lost person; image processing and verification of hits lasted 5 min 48 s). The presented case study proves that the use of an UAV assisted by SARUAV software may quicken the search mission.
1. Introduction
There are different search and rescue techniques, and the choice of which one to use during a mission depends on the terrain. Rescuers use models—such as the ring model [1,2], the bike wheel model [3], and the mobility model [4]. In addition, numerous field techniques, such as line formation and a rapid triplet search [5], employing dogs or performing linear searches by quads [6], are commonly used. Recent years brought an unprecedented interest in using manned [7] and unmanned [8] aerial technologies to assist search and rescue missions.
With the advent of unmanned aerial vehicles (UAVs), commonly known as drones, numerous search and rescue teams around the world have employed unmanned systems to assist searches for persons lost in the wilderness. Although the potential of UAVs to facilitate search and rescue missions has been noticed in the 2000s [9,10,11], the first operational applications were reported much later. Though it is impossible to list all successful searches for missing people conducted with the support of drones, a few of them are mentioned herein.
Van Tilburg [12] was the first to report on the operational use of a portable UAV in a search and rescue mission, during which a human body was spotted by an analyst who viewed a signal recorded by a drone-based camera. The BBC described a story of a climber missing in the Himalayas, who was noticed by a mountaineer piloting a drone [13]. Moreover, the BBC reported on the rescue of a 75-year-old man lost in Norfolk (UK) who was spotted by a police analyst who inspected drone-acquired imagery [14]. Recently, Polsat News presented a story of a 63-year-old Polish woman rescued by the police after the drone pilot noticed her in aerial imagery [15]. One of the UAV manufacturers, DJI, presented a web map service where all uses of DJI drones for locating missing persons were placed in an interactive map [16]. The DJI database and the individual cases reported on in the literature (and mass media publications) provide unequivocal proof that drones may save lives.
The majority (if not all) of the cases were associated with a human analyst viewing the screen or images. However, over the years, scientists have developed algorithms and methods for human detection in an unsupervised fashion, using artificial neural networks [17,18,19,20], statistical clustering [21,22,23], pictorial structures [24,25], histograms of oriented gradients [26,27], Haar classifiers [28,29], body-part detectors [30,31], and scale-invariant feature transform [32]. However, no successful operational use of such algorithms has been reported on, thus far, in the scientific literature. In this context, it is worth referring to the book by Robinson [33], who managed to use microbiological software to successfully detect people in aerial images; however, as the author said, “even that was after the fact”.
Some human detection methods have been embedded into search and rescue software. For instance, ResQuad software processes a histogram of an image and detects color anomalies [21]. A similar approach is employed in the commercially available software Loc8 [34], which identifies anomalous pixel clusters, given a priori information on the color range to be detected [35]. A different approach is utilized in the current version of the SARUAV software program [36,37], which uses deep learning techniques to detect persons in aerial imagery.
On 29 June 2021, one of the operational users of the SARUAV software, Bieszczady Mountain Rescue Service (Poland) (Grupa Bieszczadzka Górskiego Ochotniczego Pogotowia Ratunkowego—GOPR), used the software to search for a 65-year-old man in Beskid Niski (SE Poland). The SARUAV system was employed nearly 24 h after the man left his house in the village of Cergowa [38]. Within a few hours from its launch in the field, the SARUAV software detected a lost person who was reached and saved by rescuers [39,40]. The objective of this paper is to report on the aforementioned mission, which, according to the authors’ best knowledge, is the first successful application of the automated human detection system in a real search and rescue mission that resulted in saving a person’s life.
2. Methods
This section describes terrestrial and aerial search methods used on 29 June 2021, by Bieszczady Mountain Rescue Service, while searching for a missing man in Beskid Niski. In Poland, Mountain Rescue Services are legally responsible for search and rescue activities in mountainous terrains, while the police is the leading unit responsible for searching for lost persons in the entire country. The mission on 29 June 2021, was conducted by Bieszczady Mountain Rescue Service, with the police, the volunteer fire brigades, and other volunteer search units.
2.1. Terrestrial Search Methods
Commonly, having interviewed the relatives of lost individuals, a lost person is assigned to one of the categories of missing people. This allows the rescuers to determine the area in which a lost person is most likely to be present. As a result, the search region can be spatially limited. The profile of a missing person, and the resulting limitation of terrain to be checked in the first place, is often produced based on the International Search and Rescue Incident Database (ISRID) [41]. Such a limitation (in regard to the area) can be carried out using models, i.e., the ring model [1], the mobility model [4], or the bike wheel model [3]. Most of them use the point last seen (PLS), the last known point (LKP), and the initial planning point (IPP). During the reported mission, the bike wheel model was utilized, which, apart from the hub (lower circle) and the rim (bigger circle), focuses on linear terrain features (e.g., roads, paths, streams), and so called “hot points”.
Roads are often searched using the method known as SPD (abbreviation from Polish phrases: “systematyczne przeszukanie dróg” or “szczegółowe przeszukanie dróg”). It is elaborated by Chrustek [42] and used in Poland. The method forms a systematic way of using quad vehicles in searching for a lost person along roads. The quad patrol travels only within a pre-selected sector, treating crossroads as spatial references, which enable marking side roads. This helps the patrol to identify uninspected roads for further checks. In addition, the quad team should occasionally stop the vehicle and its engine to call a lost person. Linear features (not only roads, but also streams, balks, or purlieu) are also inspected by 2- or 3-person walking patrols. It is a tedious task since rescuers who visually search terrain can easily be distracted due to the sameness of such an activity. Unintentionally, rescuers may omit a missing person who, for instance, may be hidden behind obstacles.
Moreover, terrestrial searches include methods that employ rescue dogs. One novel approach in this field is known as mantrailing. Its idea differs from tracking, in which a dog directly follows the footsteps of a missing person. In mantrailing, however, a specially trained canine does not precisely travel along a person’s route, it detects drafts of scents spread by the wind or other environmental factors [43].
2.2. Aerial Search Methods
Bieszczady Mountain Rescue Service owns a few UAVs. During their mission on 29 June 2021, in Beskid Niski, the DJI Matrice 300 platform was utilized. It was equipped with an XT-S thermal sensor and ZH20 digital RGB camera manufactured by DJI. The resolution of the RGB aerial images was 4056 × 3040, with a 4.5 mm f/2.8 lens.
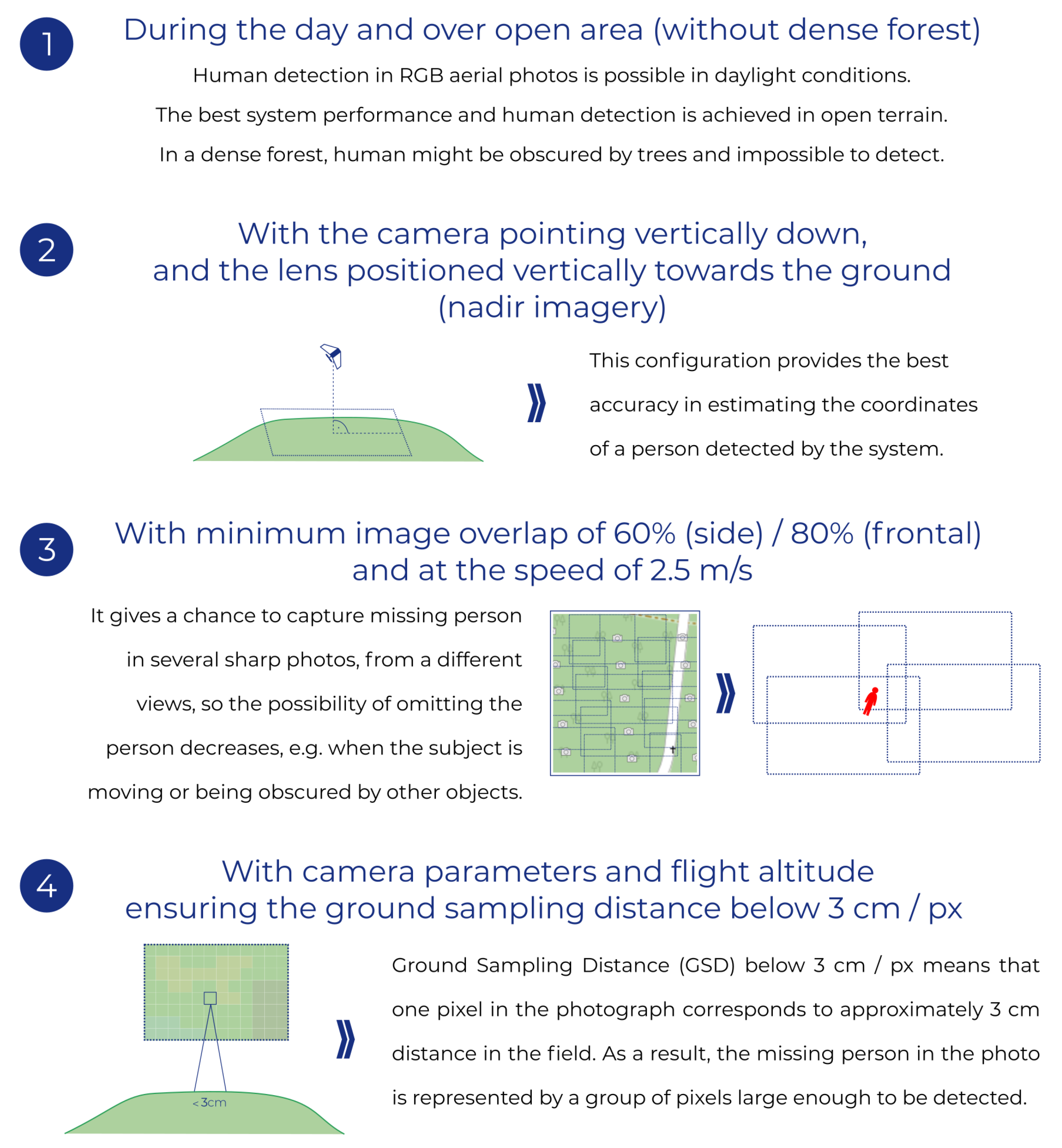
To use the SARUAV software, RGB imagery must be acquired according to the recommendations formulated by the software manufacturer (Figure 1). Namely, flights should be conducted in the daylight, over open terrain in the wilderness. It is not recommended to fly over densely built-up areas, because the number of objects resembling persons is high in villages or cities. In addition, nadir and near-nadir JPG photographs are required, taken during a photogrammetric mission.
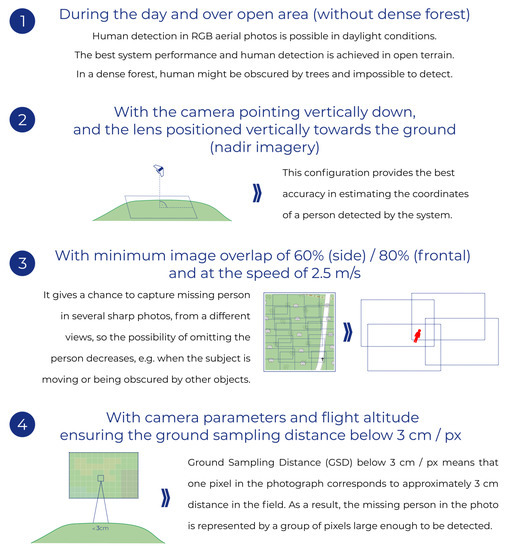
Figure 1.
Recommendations on how to carry out a UAV mission, to ensure a high probability of detecting a lost person in an aerial image.
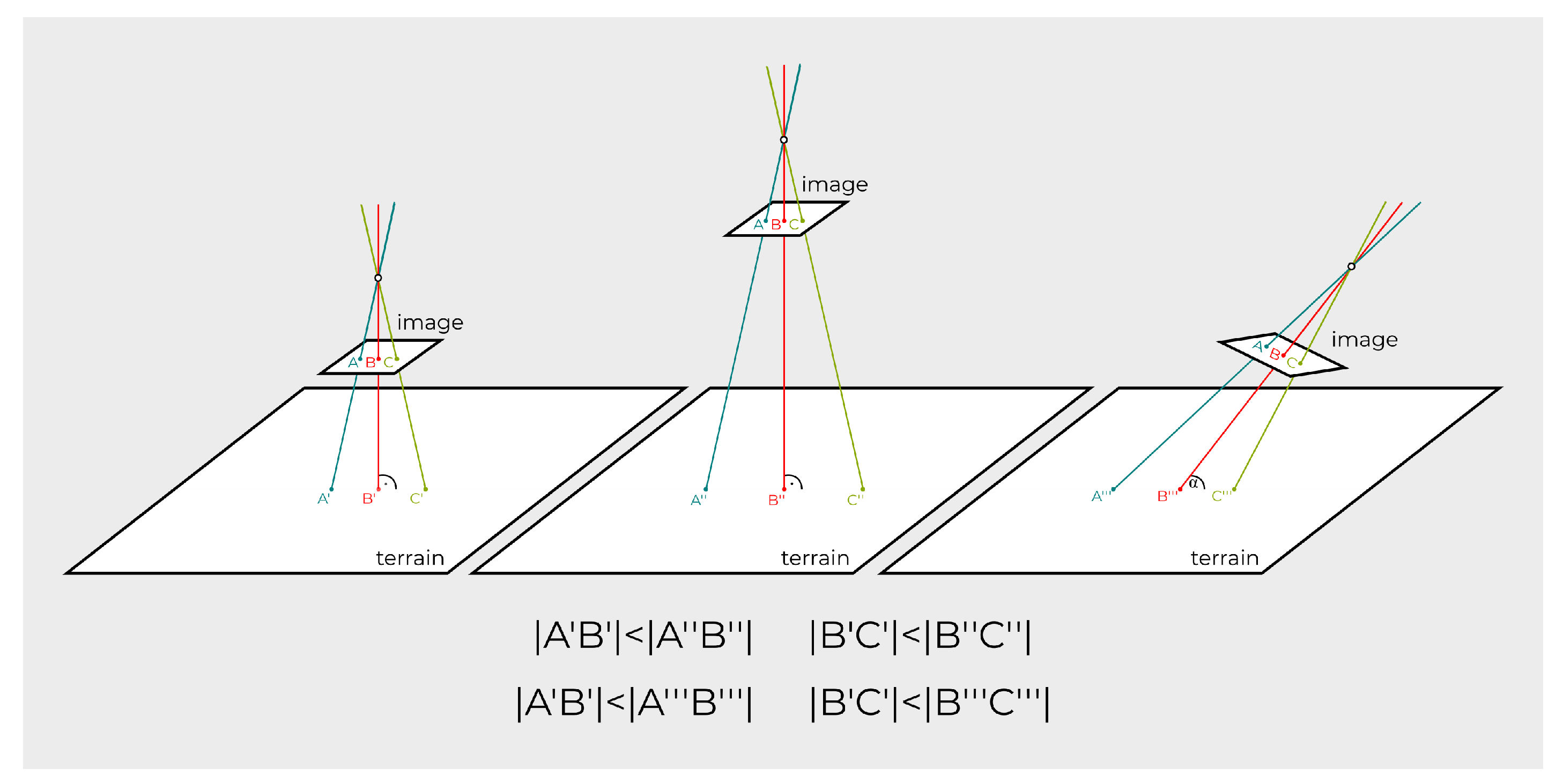
The photogrammetric approach, employing nadir or near-nadir imagery, taken with sufficient side and front overlap, is used to: (1) observe every place from multiple camera positions, to increase the chances for capturing a person; (2) compute object coordinates with the highest possible accuracy, having a nadir-looking camera, without a need for producing orthomosaics. Nadir images acquired from different altitudes above terrain lead to different coverage, which influences geometry and the computation of the object’s location (Figure 2). Moreover, the lower the flight altitude is, the lower the ground sampling distance (GSD) becomes (improving conditions for visual assessment), which facilitates human detection and expedites the verification of hits generated by the detection system. In addition, oblique photographs do not allow determining terrain coordinates in a straightforward way, since geometry, in respect to the center of projection, becomes more complicated, as presented in Figure 2. It means that a camera should point vertically down, towards the terrain.
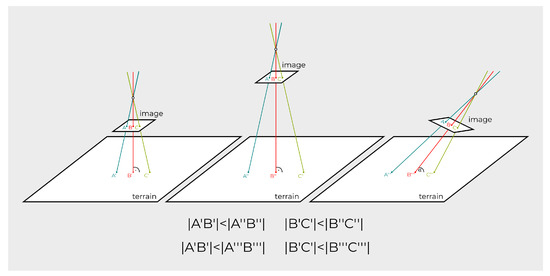
Figure 2.
Influence of altitude above ground level on the area of the observed terrain (left vs. middle sketches) and the effect of departing from nadir-looking camera orientation on geometry, in respect to the center of projection (left vs. right sketches).
The JPG compression enables working on imagery, the size of which is significantly smaller than the corresponding raw images, leading to faster image processing and wider availability. Previous studies confirmed the successful human detection in high-resolution JPG photographs [22,44,45,46]. In addition, RGB cameras enable recording JPG images and offer valuable material in cases when thermovision fails (e.g., during hot days). They are cheaper than thermal sensors and may complement thermovision because consumer-grade RGB cameras have high resolution, and RGB imagery provides a natural picture for the analysis by human eyes.
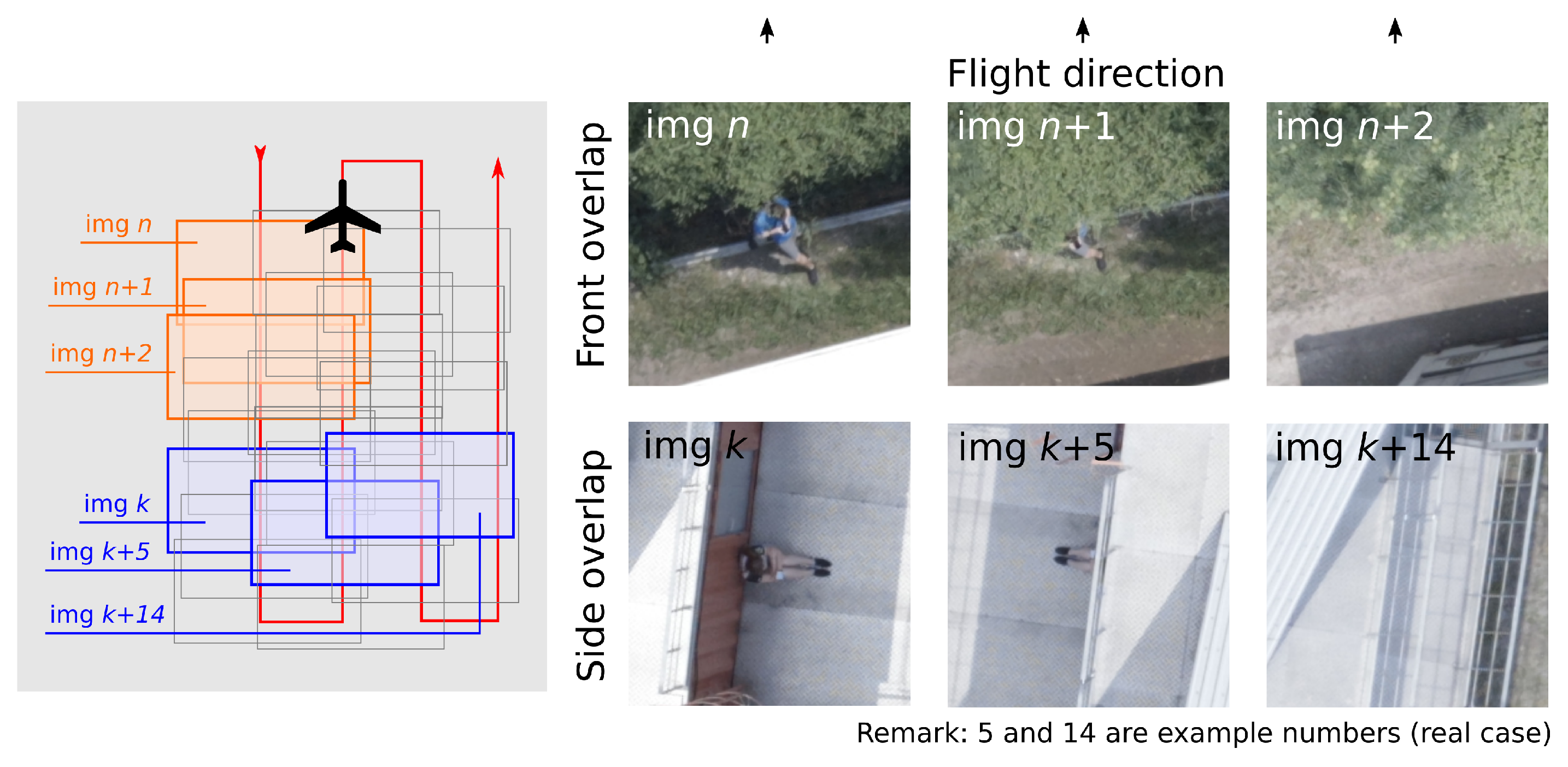
Recommended parameters of the photogrammetric flight are the following: (1) side overlap of approximately 60–70%; (2) front overlap of approximately 80%; (3) altitude so that GSD does not exceed 2 cm/px (3 cm/px at worst); (4) platform horizontal velocity of approximately 2.5–3.0 m/s. The considerable side and front overlaps mean that every point is photographed from a number of different camera locations, increasing the probability of capturing a person who may be obscured by other land cover objects (Figure 3). The small GSD values guarantee a sufficient level of detail and help the detector to differentiate between persons and similar objects. Moreover, small GSD values facilitate the human-assisted verification of hits provided by the system. The low platform horizontal velocity positively influences the sharpness of aerial imagery. In addition, the location of take-off site must be recorded for each flight. This makes the system compatible with various platforms, which record altitudes using different vertical reference systems. New models of digital cameras must be consulted with the SARUAV manufacturer prior to the software use.
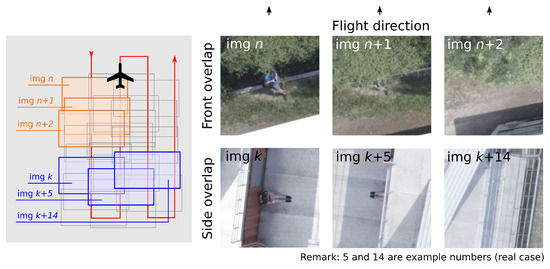
Figure 3.
Side and front overlap of nadir images as an approach for not omitting person’s view.
2.3. Methods of Image Analysis
The automated search for persons in the wilderness was carried out using SARUAV software manufactured by SARUAV, Ltd. The computer program is a successor of the early prototype of the SARUAV system, elaborated at the University of Wrocław (Poland). The prototype used the nested k-means algorithm for detecting persons in close-range aerial imagery [22], later developed by initial image pre-processing using the saturation boost [45]. The early prototype was tested in the field, but was found to be computationally demanding and required improvement in its accuracy [46]. Thus, the first commercial version of the software uses different, non-statistical detection approaches by SARUAV Ltd.
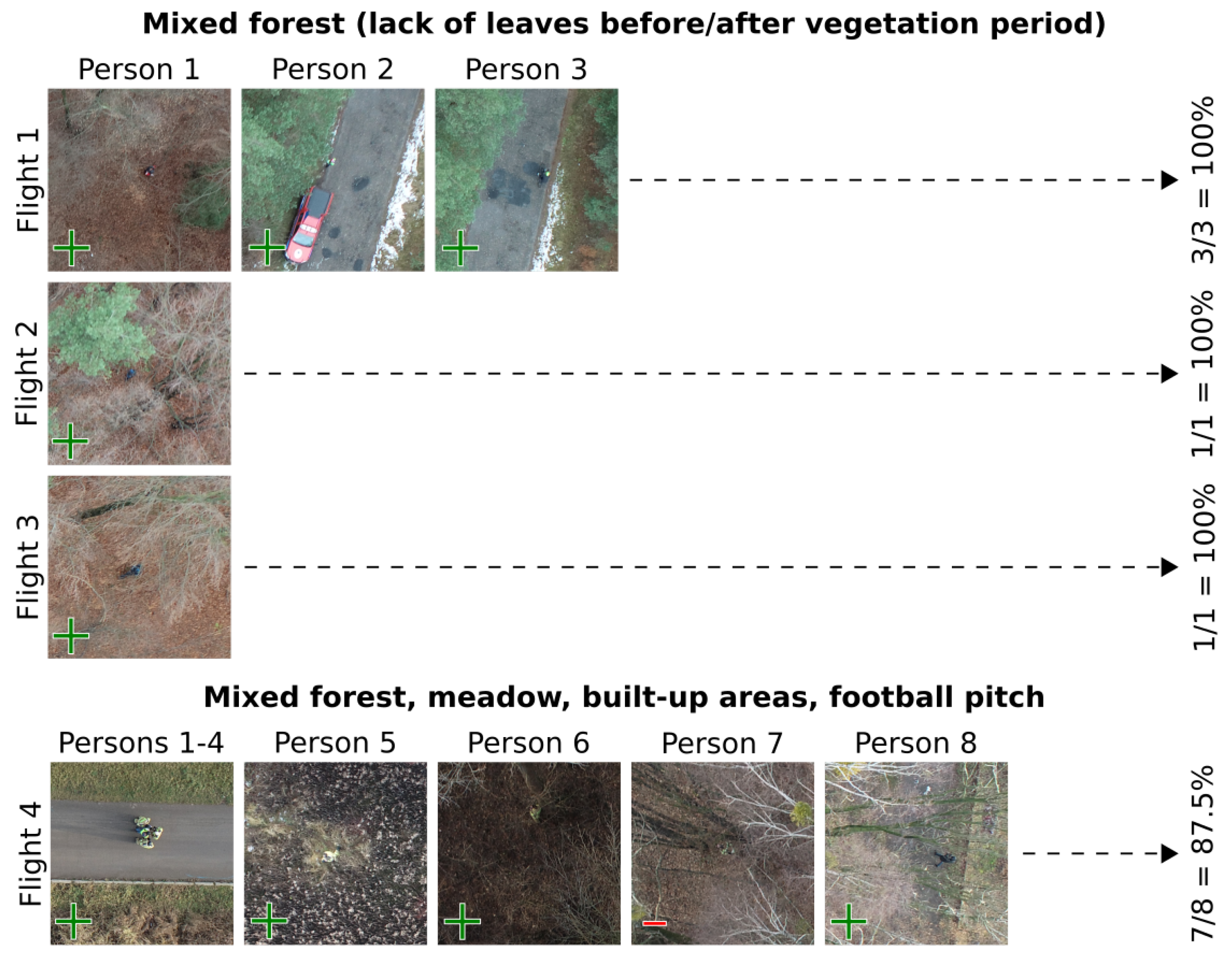
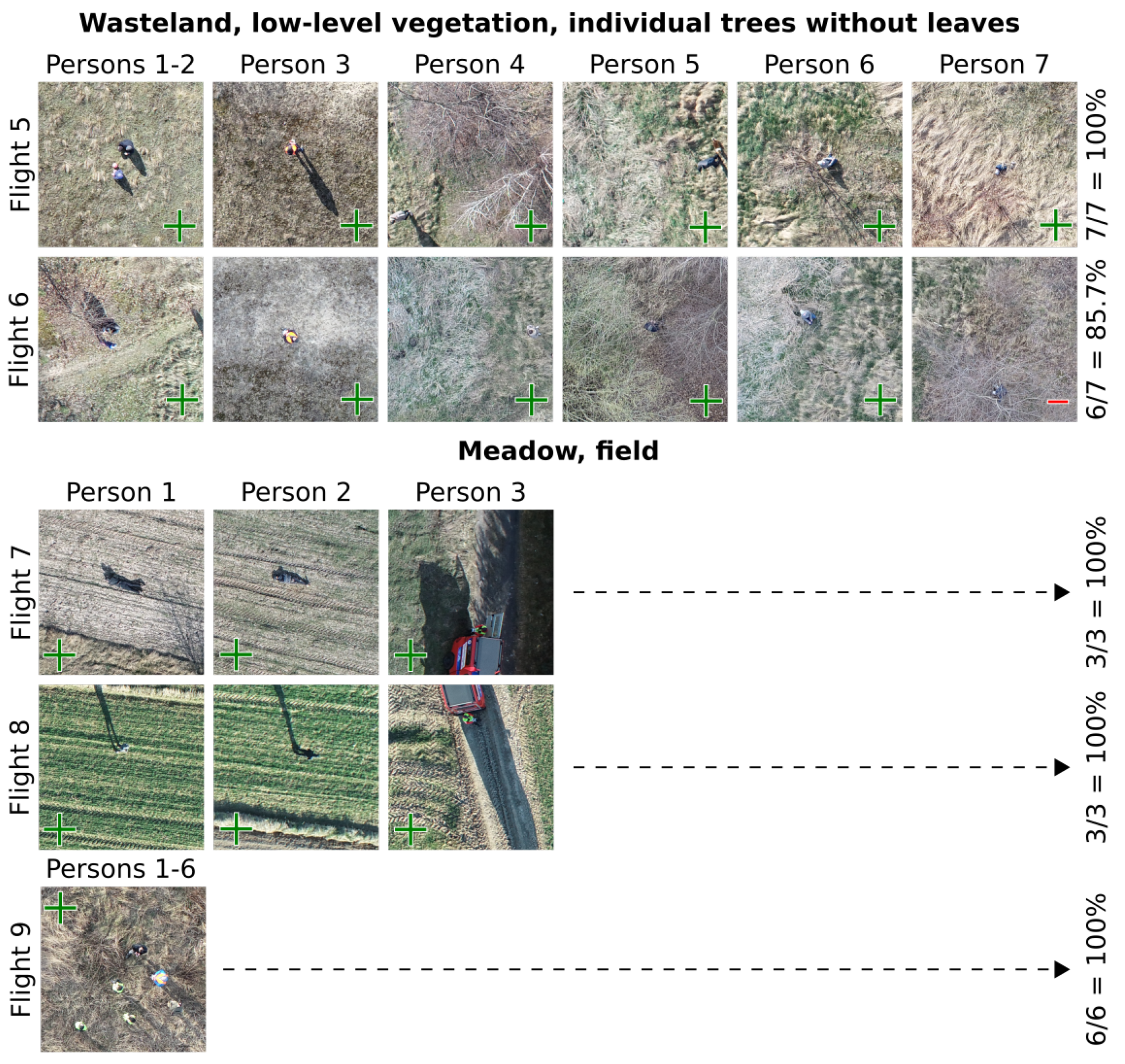
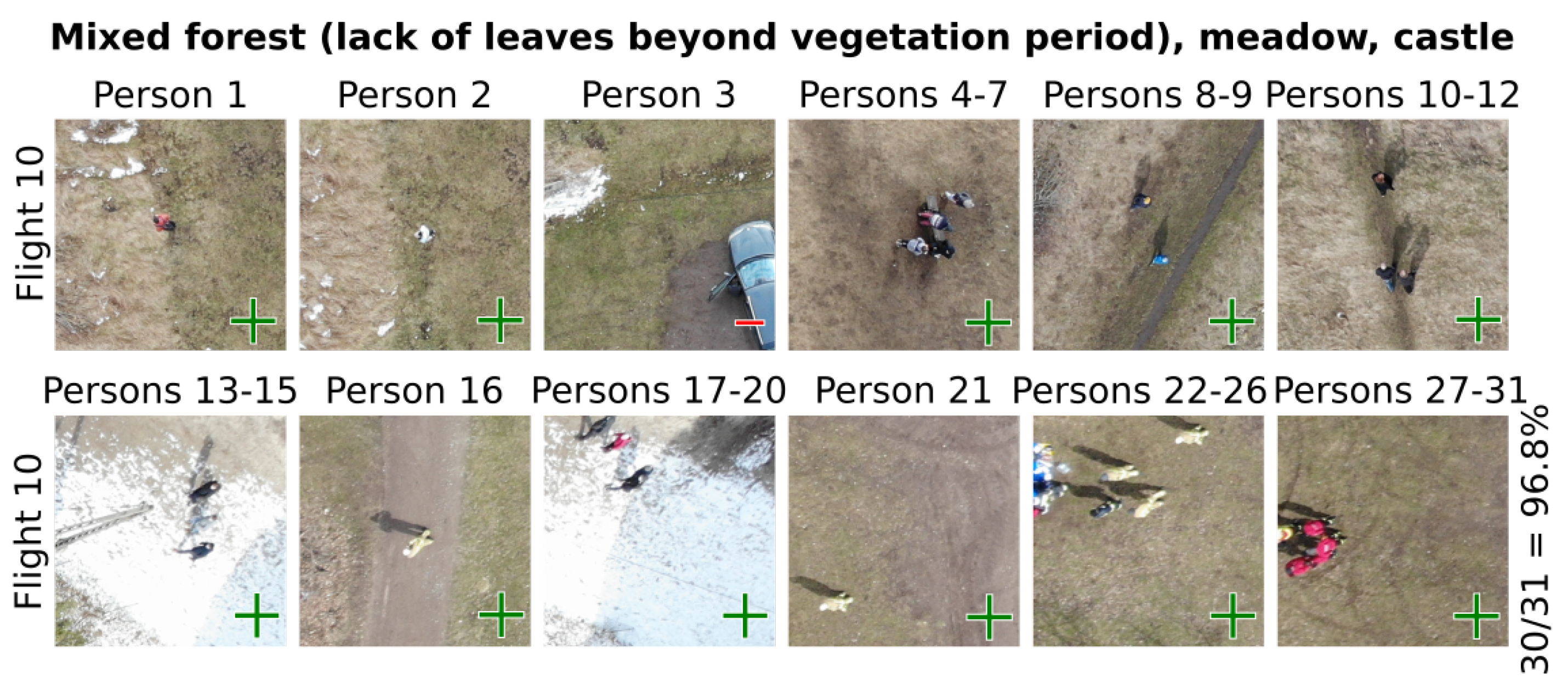
The commercial version of the SARUAV software [36,37] performs computations fast, i.e., 100 images are processed within approximately 2 min. In the current version, which is operationally used by a few rescue units in Europe, the calculations are carried out in the field on a computationally efficient laptop, without need for sending imagery to remote computers. Computations are performed on a graphics processing unit (GPU), based on NVIDIA CUDA/cuDNN. From a user perspective, SARUAV is a computer program that is dedicated specifically to rescuers. It leads a rescuer through the process of locating a missing person and offers: spatial modeling (for UAV-assisted and other missions), person detection (for UAV-assisted searches), and planning tools (for any search and rescue mission). Its graphical user interface was developed in cooperation with rescuers who participated in the eye-tracking research and the survey. Recent tests of the performance of the SARUAV software show that the detection rate, understood as a percentage of persons detected on at least one photo (out of several images of the same place, acquired in a photogrammetric mission), ranges between 86% and 100% (Table 1). Figure 4, Figure 5 and Figure 6 provide data that enable verifying the performance statistics presented in Table 1.

Table 1.
Performance of the SARUAV software based on 10 photogrammetric search test missions. Percentages correspond to percentages of persons detected on at least one image (out of a few photographs covering the same place due to the photogrammetric coverage).
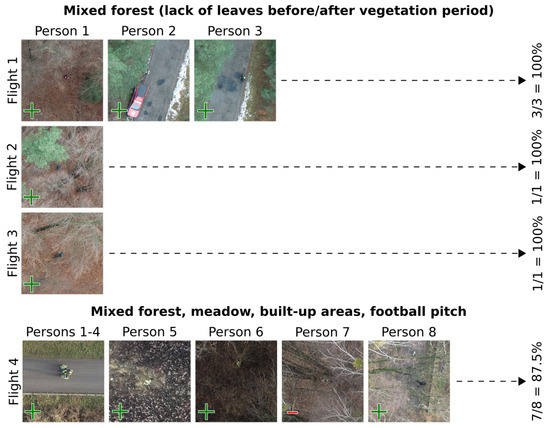
Figure 4.
True persons in flights 1–4 (land cover “a” and “b” from Table 1) with the information on successful (green “+” sign) and unsuccessful (red “−” sign) detections.
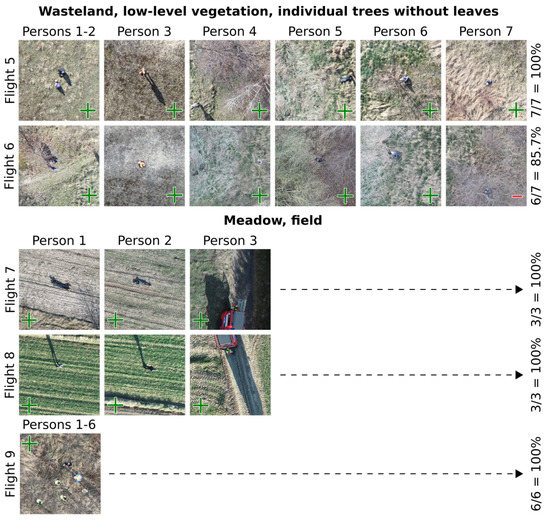
Figure 5.
True persons in flights 5–9 (land cover “c” and “d” from Table 1) with the information on successful (green “+” sign) and unsuccessful (red “−” sign) detections.
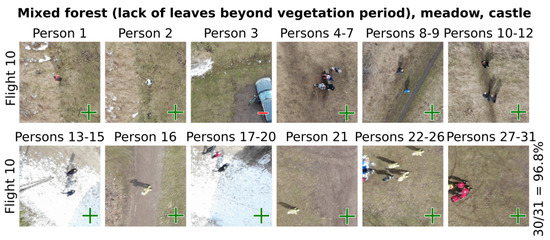
Figure 6.
True persons in flight 10 (land cover “e” from Table 1) with the information on successful (green “+” sign) and unsuccessful (red “−” sign) detections.
For the purpose of image analysis, the SARUAV system uses the original convolutional neural network (CNN) algorithm. Effective detection is possible due to the extensive amount of JPG images that were used for the CNN learning. The imagery was taken during various seasons of the year (different colors of land cover, including white when snow cover was present) and different periods of the day (different lighting and air transparency). Imagery was acquired in lowland, upland, and in the mountains, in the areas of various land cover. Persons who were photographed wore clothes of dissimilar colors, including vivid ones and camouflage colors. Their sizes were different, i.e., from children in the preschool age, through middle-size adults to stocky men. Photographs used for CNN learning were taken by different cameras and platforms (rotary-wing and fixed-wing UAVs), operating from dissimilar altitudes. This provides a wealth of diverse information and is evidence of the potential of the algorithm.
Detecting objects that resemble persons in imagery requires splitting a photo into segments. It can be done using a number of approaches, including different overlaps [22,47] and different ways of declaring window size (in metric units, in pixels). Although, in the SARUAV prototype, the segmentation into 10 × 10 m windows with 2-m stripes in their bottom and right sides was employed [22], in the herein used commercial version of the SARUAV software, the segmentation into 640 × 640 pixels was utilized. In the context of aerial imagery, the two approaches (meters vs. pixels) have some advantages and disadvantages when GSD varies significantly between individual photos taken during a photogrammetric flight. The former approach takes into account the actual GSD of a given image and, therefore, the window size in pixels is always adjusted to keep a constant metric size. It is a virtue when terrain anomalies are sought using purely statistical methods in which the size of a person matters [22]; however, it leads to uneven grids when using neural networks. In CNNs, which are used in the operational version of the SARUAV software, the initial resolution of image fragments is set constant [20].
The computer program is run on a laptop, the minimum (recommended) specification of which includes: graphics card NVIDIA GeForce GTX 1060 6 GB (NVIDIA GeForce RTX 2060 6 GB), processor Intel i5 or AMD Ryzen 5 (Intel i7 or AMD Ryzen 7), 8 GB RAM (16 GB RAM), at least 10 GB for the province-size terrain, Windows 10. The key computations are performed on a GPU.
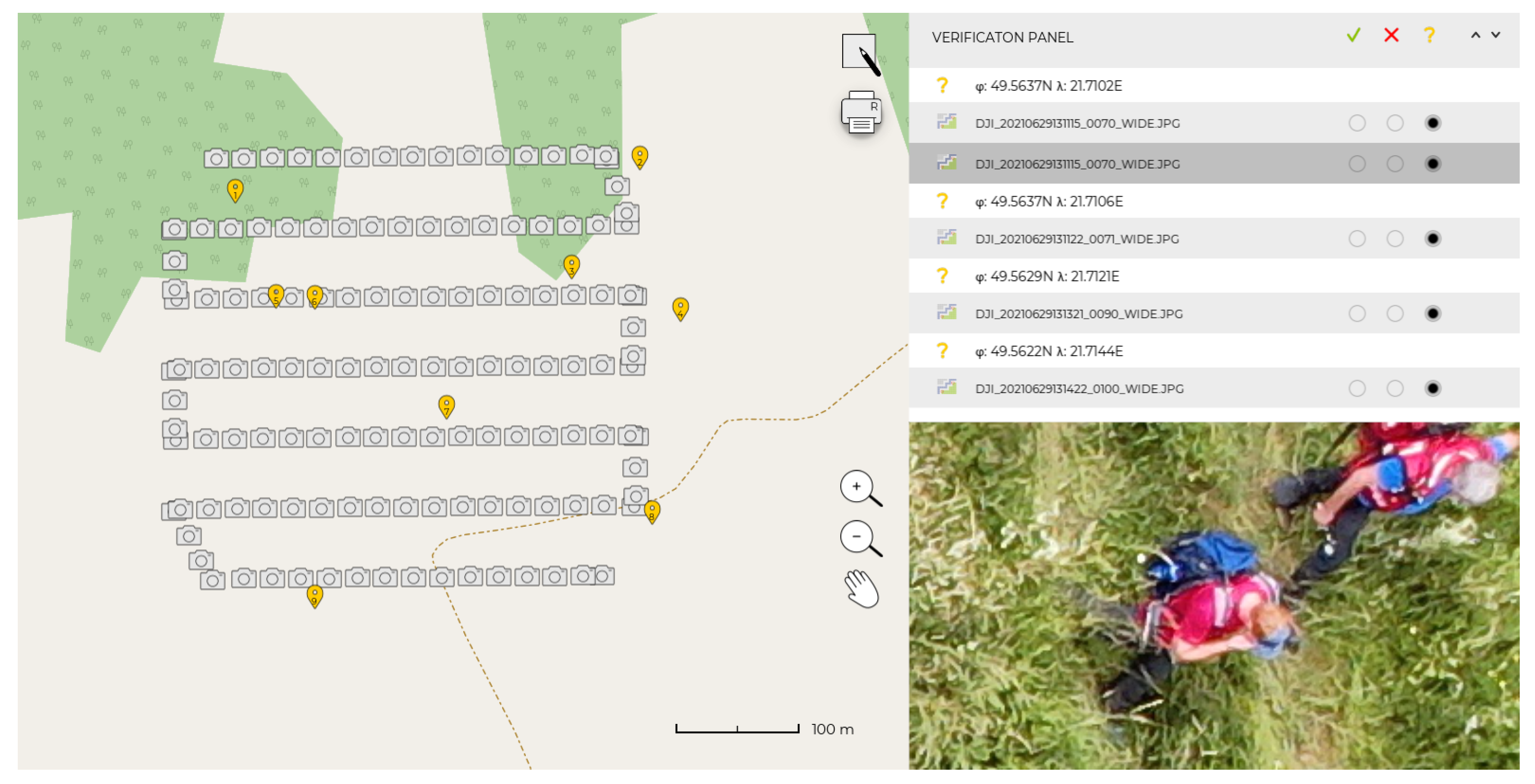
The operational procedure assumes performing a UAV mission according to the aforementioned recommendations, downloading a set of nadir or near-nadir JPG images taken during a single photogrammetric flight to the laptop, and running the person detection tool. Depending on the number of images to be processed, after a few minutes, the output is available. The effect of the calculations is a map of terrain with yellow pins, superimposed in places where the system automatically detects objects resembling persons. The coordinates of these pins are juxtaposed in the list in the vicinity of the map, and below each location, filenames of images in which the algorithm detected a person are attached. Below the list of places with the associated photos, the screen is provided, where an analyst may visually verify hits suggested by the system. The analyst confirms these hits quickly in order to filter out false positives (Figure 7). Such an analysis usually takes from a few to a dozen minutes. The final report for rescuers can be generated in the next step.
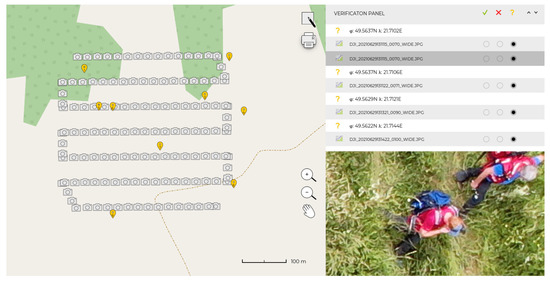
Figure 7.
The hits suggested by the SARUAV software (pins in the map area—left) and the verification panel designed for human analysts (list of coordinates with attached image filenames as well as the area of interest centered on a found object—right).
3. Results
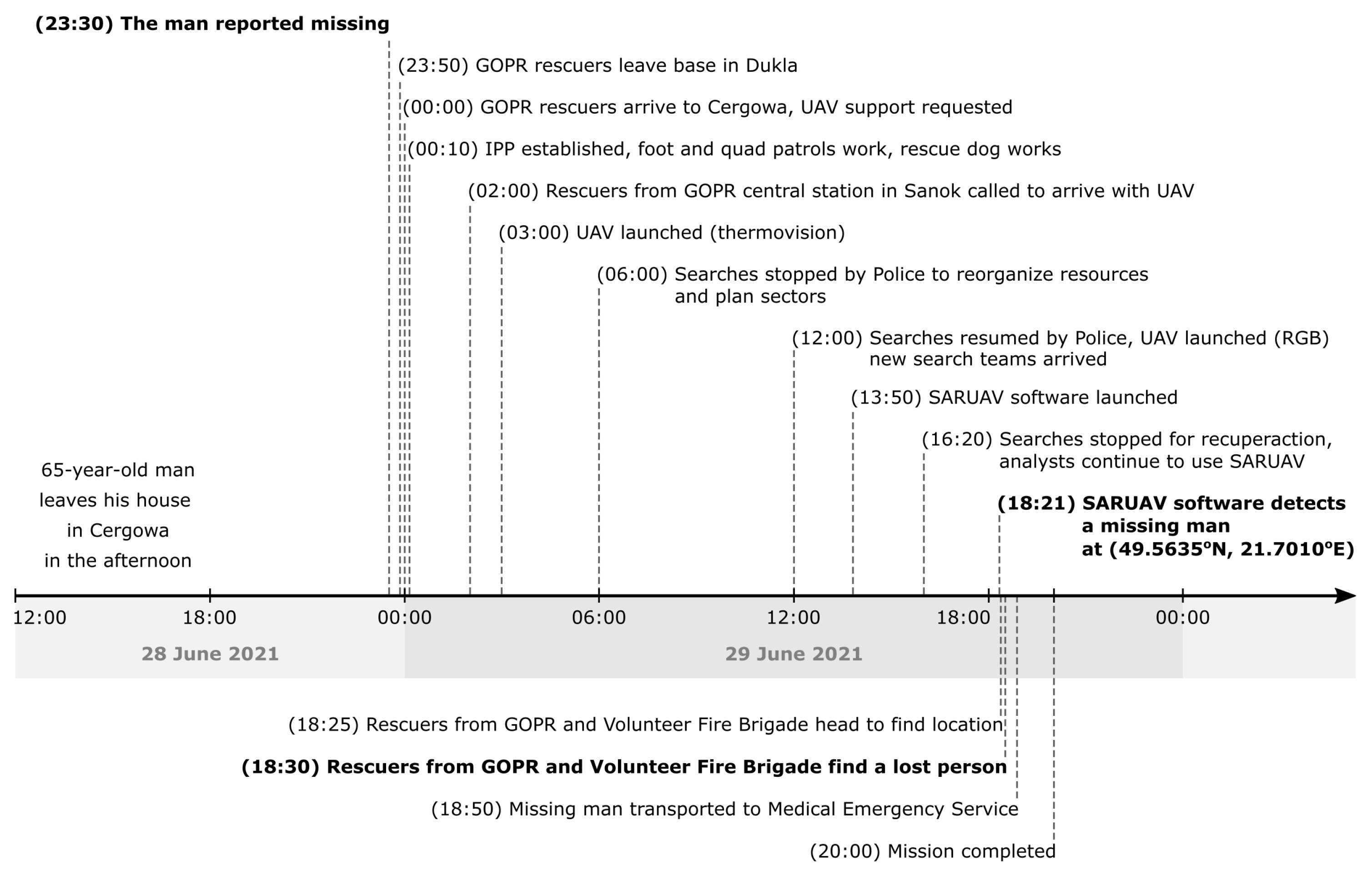
Figure 8 presents the timeline along which search and rescue activities, undertaken by search units on 28 and 29 June 2021, while searching for the 65-year-old man in the vicinity of the village of Cergowa in Beskid Niski in SE Poland (Figure 9), are denoted. The presented description of results is chronological and follows the timeline in question. All times provided in this paper are local times.
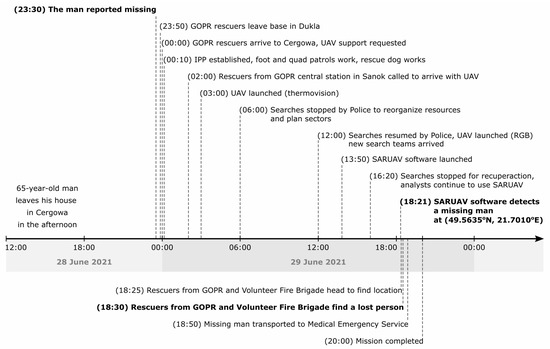
Figure 8.
Search and rescue activities undertaken during the search for a 65-year-old man who was lost near the village of Cergowa in Beskid Niski (SE Poland).
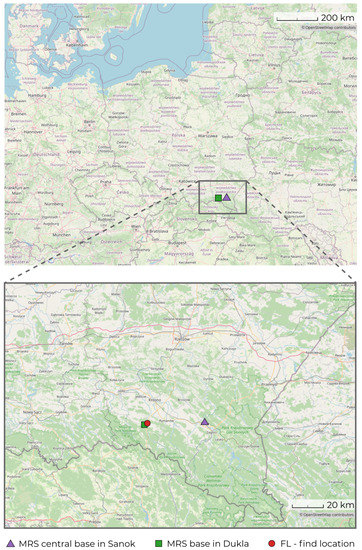
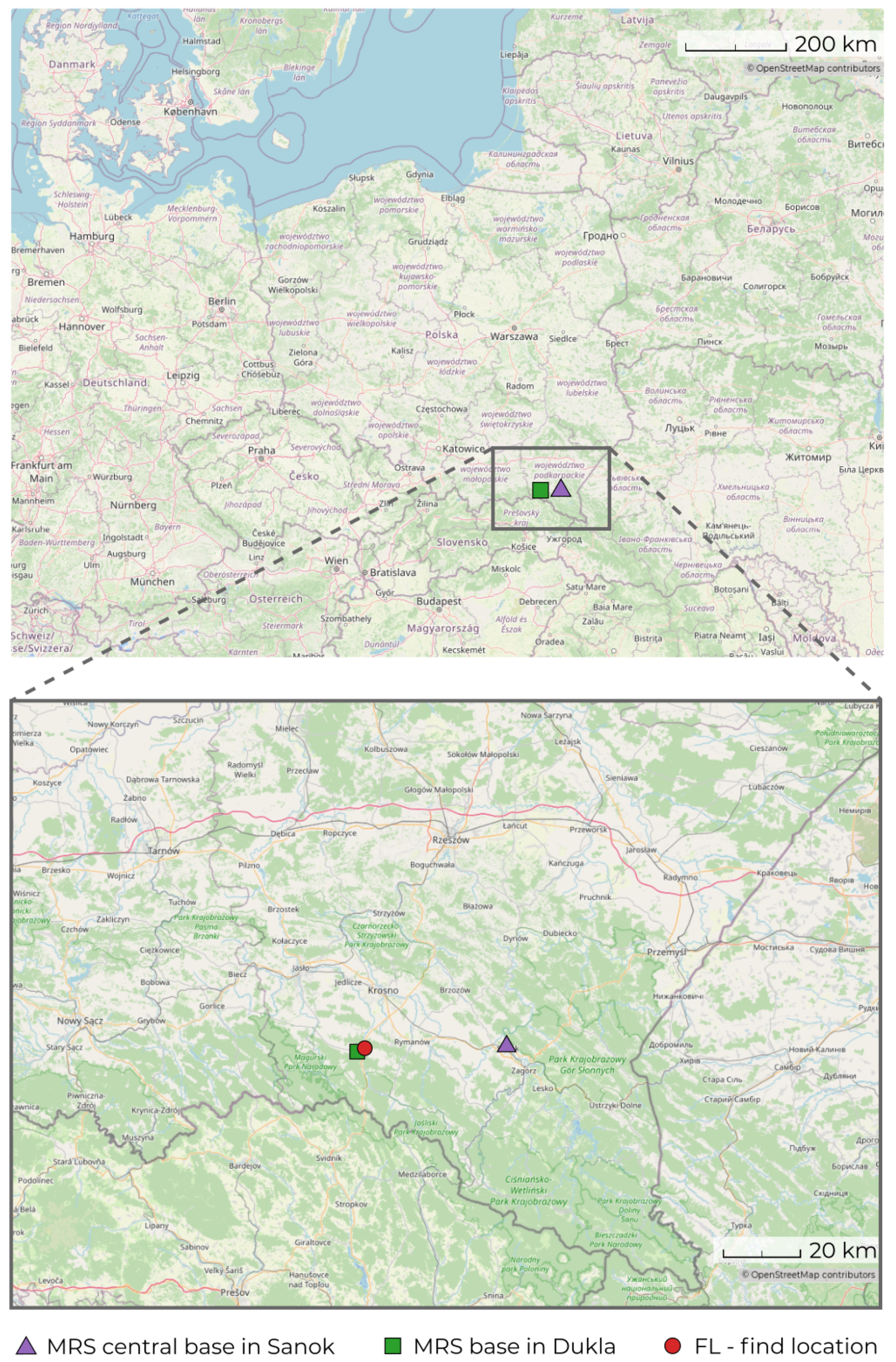
Figure 9.
Mission area in the context of geographic location of Poland and its SE part. MRS is an abbreviation of Mountain Rescue Service.
In the afternoon of 28 June 2021, a 65-year-old man, a citizen of the village of Cergowa, left his house. The man was seriously ill, endured a stroke the previous day, and suffered from Alzheimer’s disease. He also had problems with walking and, according to his family, was unable to stand up after falling down. At 23:30 on 28 June, 2021, the man’s family reported that they had not been in contact with the man since he left his house in the afternoon. The man was last seen by his neighbor in a meadow at the position (49.56342N, 21.71102E), which was later designated by rescuers as LKP. Moreover, the neighbor reported that the missing man was heading towards his house.
At 23:50 on 28 June 2021, the rescuers of Bieszczady Mountain Rescue Service left their emergency station in the town of Dukla, shortly after receiving notification about the man being lost (Figure 9). They arrived at the village of Cergowa at midnight, where all search units (police, mountain rescue service, volunteer fire brigade) organized a meeting point. At the same time, the rescuers of Bieszczady Mountain Rescue Service called their central station in the town of Sanok (Figure 9) to prepare the UAV equipment. At 00:10 on 29 June 2021, the IPP was established: (49.56428N, 21.69753E).
Moreover, at 00:10 on 29 June 2021, terrestrial searches were initiated. They included foot (2- or 3-person) and quad (the SPD method) patrols carried out by rescuers of Bieszczady Mountain Rescue Service and the volunteer fire brigade. In the first phase of searches rescuers checked the vicinity of a house and linear features (roads, streams, balks, and purlieu) between IPP and LKP. In addition, a rescuer with his rescue dog began to work (mantrailing between the house and potential routes between IPP and LKP). Since the terrestrial searches were not successful, the need for the aerial monitoring became evident.
At 02:00 on 29 June 2021, the UAV team from the central station of Bieszczady Mountain Rescue Service, based in Sanok, was asked to arrive. Around 03:00 on 29 June 2021, the UAV was used for the first time during the search (Table 2). The drone equipped with thermal camera was utilized to check potential places along meadow roads, and thermal imagery was viewed by an analyst. The missing man was not found using thermovision, though visual monitoring lasted a few hours.
Table 2.
Characteristics of UAV flights performed during the searches on 29 June 2021.
The terrestrial and aerial searches were temporarily stopped by the police at 06:00 on 29 June 2021. The reason for suspending the search and rescue activities was the need to reorganize resources and delineate new sectors for the subsequent searches.
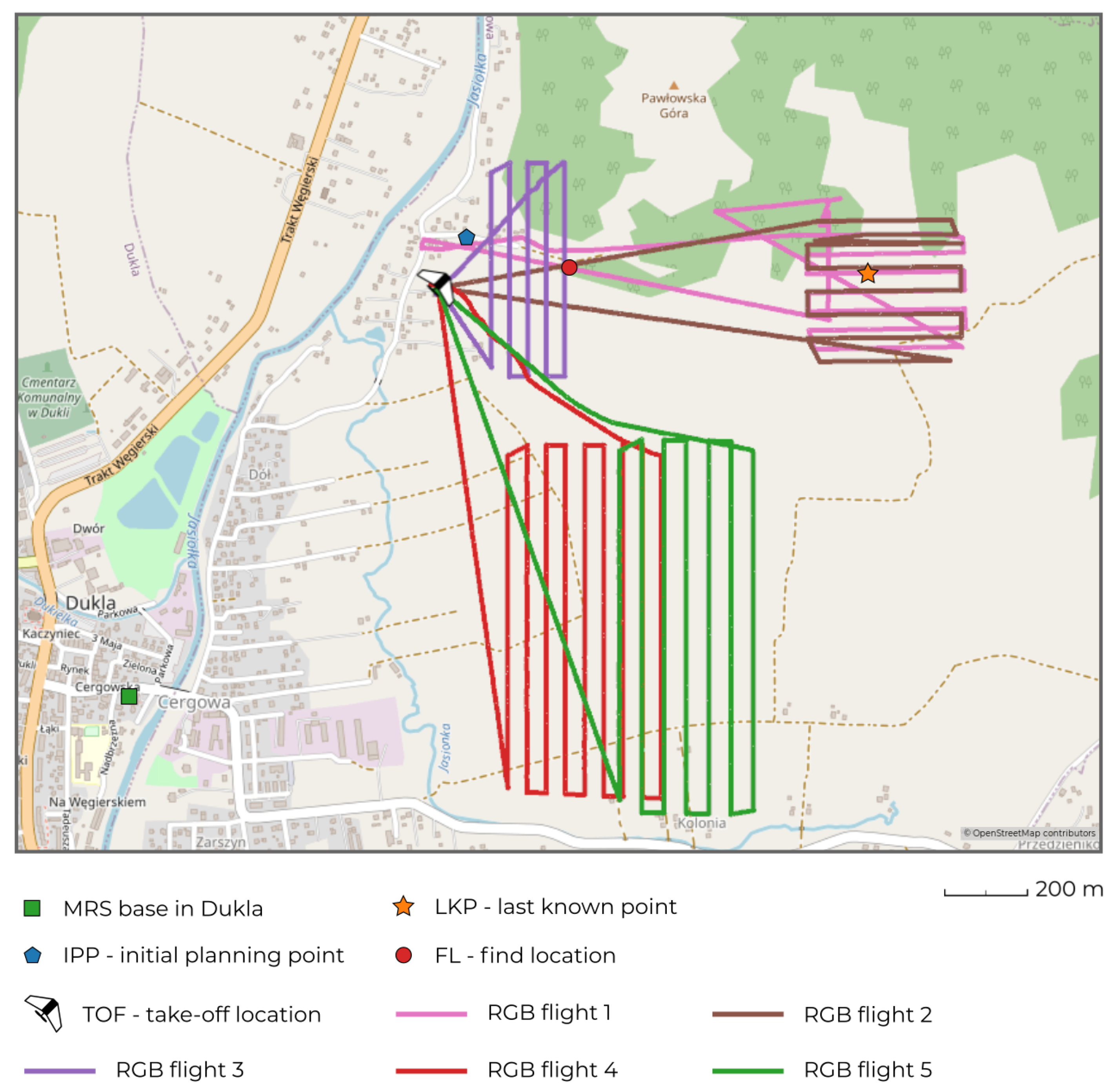
The action was resumed by the police at 12:00 on 29 June 2021. The rescuers searched the newly delineated sectors. The UAV team performed five photogrammetric missions using the ZH20 RGB camera (Table 2). The coverage of each mission is presented in Figure 10. In total, 910 nadir and near-nadir JPG photographs were taken, covering the area of 95–100 ha. At 13:50 on 29 June 2021, the SARUAV software was launched for the first time during the search and rescue mission. The system processed images from four flights (RGB2–RGB5), and objects automatically detected by SARUAV were subsequently verified by human analysts in order to filter out false positive hits. The performance statistics of the system, including the number of all hits, are juxtaposed in Table 3. Meanwhile, a duty officer from the police force in Dukla was informed about utilizing new resources, such as STORAT (the association of rescue dog guards) and Legion Gerarda (volunteer search and rescue group).
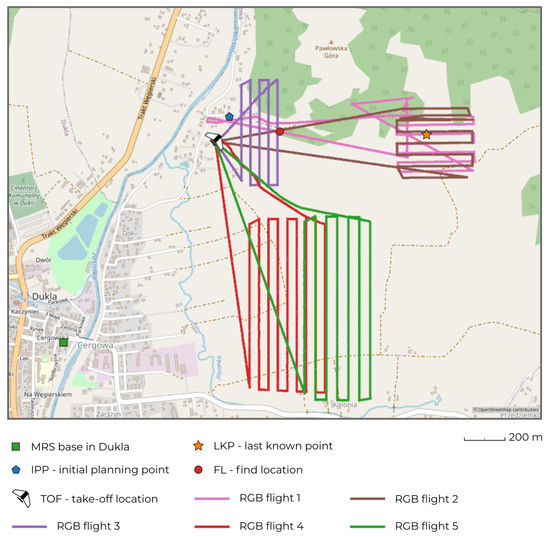
Figure 10.
Spatial coverage of RGB flights along with the corresponding flight paths, with superimposed IPP, LKP, and found location points.
Table 3.
Performance of the SARUAV software in flights RGB2–RGB5.
At 16:20 on 29 June 2021, the searches were suspended due to unfavorable weather conditions (heat wave, thunderstorms). In addition, after a prolonged search activity in the complex terrain (high grass, valleys, dense forest), there was the need for regeneration of personnel. Since the visual analysis of hits provided by the SARUAV system is not very demanding due to properly designed graphical user interface, the analysts who utilized the SARUAV software kept analyzing the imagery acquired by the UAV team and processed by the SARUAV system.
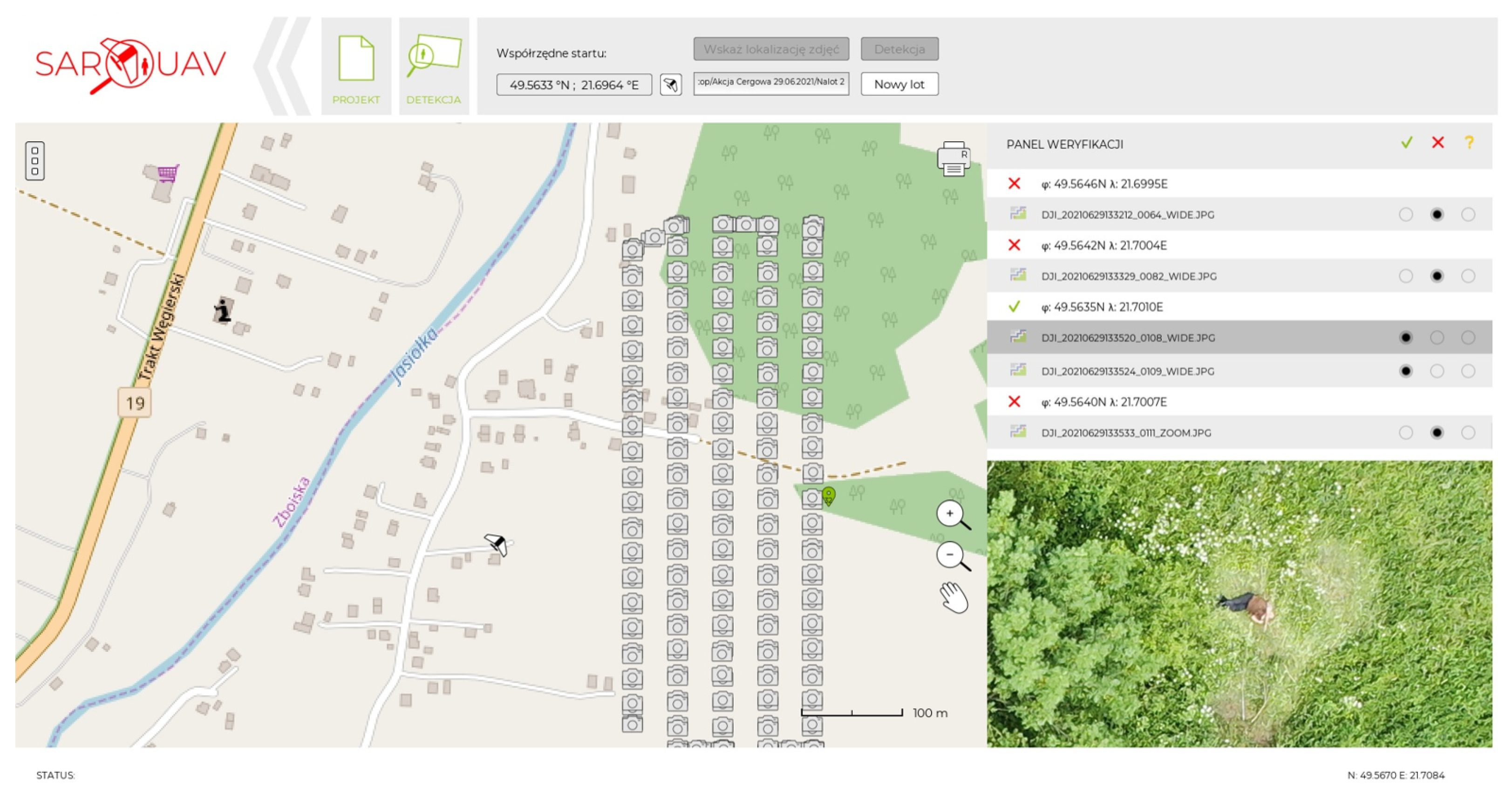
At 18:21 on 29 June 2021, a rescuer of Bieszczady Mountain Rescue Service reported that the SARUAV software detected the missing man. The true positive hit was confirmed in the software by the analyst (Figure 11). Moreover, the rescuer provided the coordinates of the place where the lost person was identified by the system: (49.5635N, 21.7010E). The information was immediately passed on to the police and the rescuers from the volunteer fire brigade. Soon (at 18:25), the rescuers headed towards the location estimated by the SARUAV system. At 18:30 on 29 June 2021, they arrived at the indicated place, found the missing man in the field, and initiated evacuation. Subsequently (at 18:50), the man was transported to an ambulance of the Medical Emergency Service. The entire search and rescue action was completed at 20:00 on 29 June 2021.
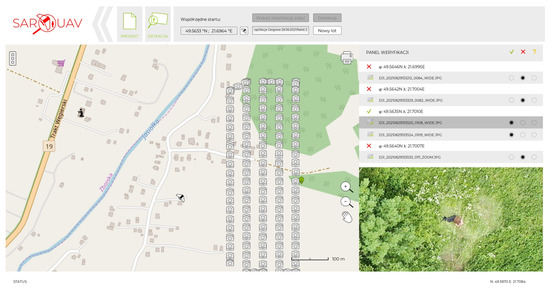
Figure 11.
View of the SARUAV graphical user interface, while the system detected the lost person in images collected in RGB flight 3.
Figure 11 presents the graphical user interface of the SARUAV software, with the successful detection of the lost person. The missing man was detected in RGB flight 3, during which 121 nadir and near-nadir JPG images were acquired. The processing time (automatic detection in SARUAV) was 1 min 50 s, and the verification of hits by the analyst took 2 min 15 s (Table 3). The missing man was successfully detected in three images out of three photographs in which he was captured.
In the entire search and rescue mission, 17 rescuers of the Bieszczady Mountain Rescue Service were involved. They used specialized cars, quads, a rescue dog, and UAVs. Moreover, rescuers from the police (commander and 2–3 patrols), volunteer fire brigade (3–4 units), and other volunteer brigades (2 units) very significantly contributed to the searches.
If the SARUAV software had not been applied for searching the area of 95–100 ha, the same terrain would have been checked by 10 groups of three rescuers within 2 h or more (the practice and theory behind the rapid triplet search [5] suggest that the most convenient area of terrain to be searched was of 10–12 ha, which, on average, can be appropriately checked by a single three-person group within 2–2.5 h). The land cover was highly diverse, with meadows, dense bushes, and forests. In addition, there were built-up areas, as well as arable land. The relief was also complicated, with flat areas and mountainous topography cut by deep valleys. Due to the difficulty of terrain, it was possible to overlook the missing man when walking 2 m apart. In addition, the skills of the rescue dog were limited by high grass and high temperature. Hence, the environmental conditions made terrestrial searches difficult. Therefore, aerial searches using UAVs and the SARUAV software were the appropriate methods to facilitate and quicken the mission.
4. Discussion
It is rather impossible to unequivocally judge how this specific search incident would proceed and with what effect it would end without the use of UAV, assisted by SARUAV software. However, it is evident that these technologies provided significant support and possibly quickened the mission. Fortunately, the missing man was located on time, and found alive. He required only minor medical assistance and evacuation.
Figure 8 shows that the time elapsed from leaving the house to the successful detection was greater than 24 h. According to Koester and Stooksbury [48], who studied the behavior of missing people suffering from Alzheimer’s disease in Virginia (USA), survivability after 24 h was of 54%. It means that 46% of patients who spent more than 24 h in the wilderness were found dead on arrival of search units. It can be inferred that life of the 65-year-old man lost in the vicinity of the village of Cergowa in Poland (also the Alzheimer’s disease patient), who was successfully rescued with the use of unmanned technologies, was at serious risk after 24 h of searching. Moreover, the missing man reported post-stroke effects and problems with mobility, which additionally complicated his situation after being exposed to the wilderness. Therefore, every minute of the search and rescue mission was essential for its overall success.
We believe that quickening the detection by applying the UAV together with the SARUAV software was the key factor that increased the probability of survival. This is particularly evident because, at a certain stage of searching, other methods were found not successful, required new resources and the regeneration of personnel. Little work burden and low risk for rescuers when using UAV with SARUAV allowed the terrestrial work to efficiently continue, without the need for allocating new resources, bearing new costs, or waiting for personnel recuperation.
The fundamental role of time in search and rescue activities was highlighted by Adams et al. [49], who emphasized it in their work: “Search is a time-critical event: when search and rescue missions may become futile”. Although they did not only focus on Alzheimer’s disease patients, but conducted a much wider study, their Kaplan–Meier estimator predicted the survival status as a function of search time, and determined the cut-off point of 51 h (in accordance with Koester and Stooksbury [48], mortality among Alzheimer’s disease patients grows to 62% if a person remains un-found for longer than 48 h).
Factors that contributed to the prolonged health stability of the missing man were the weather and clothing. The weather conditions in Beskid Niski on 28 and 29 June 2021, were favorable. The following measures were recorded in the central station of Bieszczady Mountain Rescue Service in Sanok (approximately 37 km from Cergowa): temperature 29 C, wind speed 5 km/h, good visibility, cloudiness 3/8, no precipitation (28 June 2021, 14:30 local time); temperature 17 C, no wind, good visibility, cloudiness 2/8, no precipitation (29 June 2021, 7:30 local time); temperature 27 C, no wind, good visibility, cloudiness 4/8, no precipitation (29 June 2021, 14:30 local time). The lost person wore trousers and a loose shirt (probably one layer). According to Tikuisis [50], a standard healthy man who wears one 1-millimeter loose clothing, exposed to wind of 5 km/h and air temperature of 0 C, can survive approximately 36 h. In our study, the missing man had standard posture, but was seriously ill and was exposed to much higher summer temperatures. Thus, the described case cannot be directly compared with model-predicted survival times elaborated by Tikuisis [50].
The uniqueness of the case described in the paper lies in the fact that the lost person was detected automatically in aerial images. To date, other operational searches with the use of UAVs were successful due to human observers viewing the screen [12,13,14,15,16]. Our work presents a step forward in performing, facilitating, and quickening searches for missing people using drones. It confirms that near-real-time image analytics with SARUAV software not only decreases search time (leading to the increase in the probability of survival), but also decreases work burden imposed on the search and rescue personnel (automation of the process of human detection and the graphical user interface designed for rescuers).
Although the paper describes a single case study, it is possible to formulate lessons learned from the search and rescue activities conduced with the use of a UAV photography and the SARUAV software. Firstly, the analysis should be carried out as quickly as possible after acquiring imagery. In the reported case, the analysis was suspended (Table 2), which resulted in an unnecessary delay (the time from the first launch of the system to the successful detection was 4 h 31 min, however, the analysis of a set of images collected in one flight, in which the person was located, took only 5 min and 48 s)—it is apparent from Figure 8 and Table 3. Such an approach, in which the analysis begins just after a UAV mission, allows rescuers to promptly verify hits generated by the system in the field. Secondly, the study confirms that the analysis of aerial imagery should be carried out with the use of dedicated software, since visual inspection of images is often ineffective. This finding is in agreement with the study of gaze behavior of spotters in the air-to-ground detection exercise [51]. Thirdly, UAV flight regions should be delineated by a planist and imported from the planist’s computer. This will prevent flying beyond sectors of interest, stop overlapping flight regions and prevent omitting areas between sectors. In the presented case, RGB flights 1 and 2 overlapped and, in addition, there was a spatially considerable gap between RGB flight 3, RGB flights 1/2 and RGB flights 4/5 (Figure 10). Such situations would have been easily eliminated if the planist-produced sectors were imported. Fourthly, a UAV pilot and a SARUAV analyst should operate from a stand that is isolated from third parties. Such a recommendation fits in the process of assigning roles in search and rescue activities with the use of drones [52].
5. Conclusions
In this paper, we described the case of the first successful rescue of a person lost in open terrain, performed using SARUAV-assisted automated detection of people in aerial imagery acquired by drones. The rescue mission was conducted by Bieszczady Mountain Rescue Service, Police, the volunteer fire brigade, and other volunteer search units near the village of Cergowa in SE Poland. The role of the Bieszczady Mountain Rescue Service was of particular importance because its rescuers were responsible for the UAV monitoring and SARUAV analysis. The following issues should be highlighted:
- The missing 65-year-old man, who suffered from the Alzheimer’s disease, ensured a stroke and had problems with mobility; he spent more than 24 h in the wilderness.
- Aerial monitoring of terrain using drones, assisted by automated human detection offered by the SARUAV system, was conduced, along with a variety of terrestrial search methods.
- At 13:50 on 29 June 2021, the SARUAV system was launched for the first time during the searches. It was used to process 782 near-nadir JPG images acquired during four photogrammetric flights. At 18:21, the SARUAV detector spotted the missing man. The time from the first launch of the system to the successful detection was 4 h 31 min.
- The data from the fifth flight (RGB3) was automatically processed in 1 min 50 s and verified by the analyst in 2 min 15 s. Thus, the detection was performed rapidly.
- Knowing the survivability of lost persons suffering from Alzheimer’s disease after 24 h of being exposed to the wilderness (54%), it is likely that quickening the mission by the use of UAV and SARUAV technologies significantly contributed to rescuing him, in a stable, healthy condition. Other illnesses will possibly cause further risks.
Author Contributions
Conceptualization, T.N. and W.P.; methodology, B.M., M.J. and T.N.; software, B.M., M.J. and T.N.; validation, B.M., M.J., T.N. and W.P.; formal analysis, T.N., M.J. and B.M.; investigation, T.N., M.J. and B.M.; resources, W.P.; data curation, B.M., M.J., T.N., W.P. and T.M.; fieldwork, T.M., W.P.; writing—original draft preparation, T.N.; writing—review and editing, M.J., B.M. and W.P.; visualization, M.J. and T.N.; supervision, T.N.; funding acquisition, T.N., M.J. and B.M. All authors have read and agreed to the published version of the manuscript.
Funding
The development of the SARUAV software, conducted by SARUAV Ltd., was co-financed by the European Union in frame of the European Regional Development Fund within the activity 1.3.1 “Wsparcie projektów badawczo-rozwojowych w fazie preseed przez fundusze typu proof of concept—BRIdge Alfa pn. Epic Alfa Fundusz zaawansowanych technologii w fazie PoP i PoC”, carried out by ERC, Ltd. (previously Epic Alfa Ltd.). The BRIdge Alfa programme is organized by the National Centre for Research and Development, Poland. The UAVs operated by Bieszczady Mountain Rescue Service were acquired in frame of the CBC Programme Poland–Belarus–Ukraine. Bieszczady Mountain Rescue Service purchased the SARUAV license from funds provided by Bieszczady National Park. Research carried out by Tomasz Motyl was supported in frame of the PhD programme Doktorat wdrożeniowy.
Institutional Review Board Statement
Bieszczady Mountain Rescue Service (bieszczady.gopr.pl) is a part of Mountain Rescue Service (gopr.pl). The latter organization is legally responsible for search and rescue activities in mountainous terrain of Poland. The reported mission (searching for a 65-year-old man in the vicinity of the village of Cergowa in SE Poland) was carried out in frame of the legal empowerment. The SARUAV software was commercially deployed by SARUAV, Ltd., on a computer from Bieszczady Mountain Rescue Service (license agreement concluded on 4 December, 2020). SARUAV, Ltd. and the University of Wrocław signed the license agreement on 5 March 2019, and SARUAV, Ltd. is legally entitled to develop and deploy the SARUAV system.
Informed Consent Statement
The content of the paper does not allow the reader to identify the lost person and his family.
Data Availability Statement
Data are not publicly available because Bieszczady Mountain Rescue Service carried out the search and rescue mission operationally (real action). Therefore, the details cannot be promulgated due to legal constraints.
Acknowledgments
Meteorological data juxtaposed in Table 2 are provided by Airdata UAV (airdata.com) through the account of Bieszczady Mountain Rescue Service. Meteorological data provided in Section 4 are recorded in Sanok by Bieszczady Mountain Rescue Service. Imagery used to produce Figure 3 was provided courtesy of WOPR Nysa. Images utilized to prepare Figure 6 and compute the statistics corresponding to land cover “e” in Table 1 were kindly delivered by OSP Niegoszowice.
Conflicts of Interest
The relations between entities are denoted in the Funding and the Institutional Review Board Statement.
Abbreviations
The following abbreviations are used in this manuscript:
| UAV | Unmanned aerial vehicle |
| GOPR | Górskie Ochotnicze Pogotowie Ratunkowe |
| ISRID | International Search & Rescue Incident Database |
| PLS | point last seen |
| LKP | last known point |
| IPP | initial planning point |
| SPD | Systematyczne przeszukanie dróg OR Szczegółowe przeszukanie dróg |
| GSD | ground sampling distance |
| GPU | graphics processing unit |
| MRS | Mountain Rescue Service |
References
- Heth, C.D.; Cornell, E.H. Characteristics of travel by persons lost in Albertan Wilderness Areas. J. Environ. Psychol. 1998, 18, 223–235. [Google Scholar] [CrossRef]
- Jurecka, M.; Niedzielski, T. A procedure for delineating a search region in the UAV-based SAR activities. Geomat. Nat. Hazards Risk 2017, 8, 53–72. [Google Scholar] [CrossRef]
- Koester, R. Lost Person Behavior: A Search and Rescue Guide on Where to Look—For Land, Air, and Water; dbS Productions: Charlottesville, VA, USA, 2008. [Google Scholar]
- Doherty, P.J.; Guo, Q.; Doke, J.; Ferguson, D. An analysis of probability of area techniques for missing persons in Yosemite National Park. Appl. Geogr. 2014, 47, 99–110. [Google Scholar] [CrossRef]
- Chrustek, R. Poszukiwania osób zaginionych: Szybka trójka poszukiwawcza—Metoda szczegółowego przeszukania terenu. Arcana GIS GIS Trendy 2015, wiosna 2015, 33–37. [Google Scholar]
- Tuśnio, N.; Wolny, P. Nowoczesne narzędzia i sprzęt wykorzystywane do poszukiwań osób zaginionych (Modern Tools and Equipment Used to Search for Missing Persons). Zesz. Nauk. SGSP 2017, 61, 7–23. [Google Scholar]
- Grissom, C.K.; Thomas, F.; James, B. Medical helicopters in wilderness search and rescue operations. Air Med. J. 2006, 25, 18–25. [Google Scholar] [CrossRef] [PubMed]
- Karaca, Y.; Cicek, M.; Tatli, O.; Sahin, A.; Pasli, S.; Fatih Beser, M.; Turedi, S. The potential use of unmanned aircraft systems (drones) in mountain search and rescue operations. Am. J. Emerg. Med. 2018, 36, 583–588. [Google Scholar] [CrossRef]
- Doherty, P.; Rudol, P. A UAV Search and Rescue Scenario with Human Body Detection and Geolocalization. In AI 2007: Advances in Artificial Intelligence; Mehmet, A.O., Thornton, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–13. [Google Scholar]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1151–1173. [Google Scholar]
- Goodrich, M.A.; Morse, B.S.; Gerhardt, D.; Cooper, J.L. Supporting Wilderness Search and Rescue Using a Camera-Equipped Mini UAV. J. Field Robot. 2008, 25, 89–110. [Google Scholar] [CrossRef]
- Van Tilburg, V. First Report of Using Portable Unmanned Aircraft Systems (Drones) for Search and Rescue. Wilderness Environ. Med. 2017, 28, 116–118. [Google Scholar] [CrossRef] [Green Version]
- Drone Spots Scots Climber Feared Dead in Himalayas. Available online: www.bbc.com/news/uk-scotland-highlands-islands-44858758 (accessed on 9 August 2021).
- Missing Norfolk Man in ‘Lucky’ Police Drone Rescue. Available online: www.bbc.com/news/uk-england-norfolk-44526984 (accessed on 9 August 2021).
- Tychy: Wypatrzył ją Policyjny Dron. 63-Latka z Demencją Leżała w Rowie Melioracyjnym. Available online: www.polsatnews.pl/wiadomosc/2021-07-17/tychy-wypatrzyl-ja-policyjny-dron-63-latka-z-demencja-lezala-w-rowie-melioracyjnym (accessed on 9 August 2021).
- Drone Rescues Around the World. Available online: enterprise.dji.com/drone-rescue-map (accessed on 15 August 2021).
- Bejiga, M.; Zeggada, A.; Nouffidj, A.; Melgani, F. A convolutional neural network approach for assisting avalanche search and rescue operations with UAV imagery. Remote Sens. 2017, 9, 100. [Google Scholar] [CrossRef] [Green Version]
- Xia, D.X.; Su, S.Z.; Geng, L.C.; Wu, G.X.; Li, S.Z. Learning rich features from objectness estimation for human lying-pose detection. Multimed. Syst. 2017, 23, 515–526. [Google Scholar] [CrossRef]
- Tian, L.; Li, M.; Hao, Y.; Liu, J.; Zhang, G.; Chen, Y.Q. Robust 3-d human detection in complex environments with a depth camera. IEEE Trans. Multimed. 2018, 20, 2249–2261. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [Green Version]
- Agcayazi, M.T.; Cawi, E.; Jurgenson, A.; Ghassemi, P.; Cook, G. ResQuad: Toward a semi-autonomous wilderness search and rescue unmanned aerial system. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 898–904. [Google Scholar]
- Niedzielski, T.; Jurecka, M.; Stec, M.; Wieczorek, M.; Miziński, B. The nested k-means method: A new approach for detecting lost persons in aerial images acquired by unmanned aerial vehicles. J. Field Robot. 2017, 34, 1395–1406. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Gómez-Silva, M.J.; Moreno, F.M.; de la Escalera, A.; Armingol, J.M. An appearance-based tracking algorithm for aerial search and rescue purposes. Sensors 2019, 19, 652. [Google Scholar] [CrossRef] [Green Version]
- Felzenszwalb, P.; Huttenlocher, D.P. Pictorial structures for object recognition. Int. J. Comput. Vis. 2005, 61, 55–79. [Google Scholar] [CrossRef]
- Andriluka, M.; Roth, S.; Schielem, B. Pictorial structures revisited: People detection and articulated pose estimation. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1014–1021. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the International Conference on Computer Vision & Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Zhao, Y.; Zhang, Y.; Cheng, R.; Wei, D.; Li, G. An enhanced histogram of oriented gradients for pedestrian detection. IEEE Intell. Transp. Syst. Mag. 2015, 7, 29–38. [Google Scholar] [CrossRef]
- Gąszczak, A.; Breckon, T.B.; Han, J. Real-time people and vehicle detection from UAV imagery. In Proceedings of the SPIE 7878, Intelligent Robots and Computer Vision XXVIII: Algorithms and Techniques, San Francisco, CA, USA, 24–25 January 2011; p. 78780B. [Google Scholar]
- Aguilar, W.G.; Luna, M.A.; Moya, J.F.; Abad, V.; Parra, H.; Ruiz, H. Pedestrian detection for UAVs using cascade classifiers with meanshift. In Proceedings of the 2017 IEEE 11th International Conference on Semantic Computing (ICSC), San Diego, CA, USA, 30 January–1 February 2017; pp. 509–514. [Google Scholar]
- Felzenszwalb, P.F.; McAllester, D.A.; Ramanan, D. A discriminatively trained, multiscale, deformable part model. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Bourdev, L.; Malik, J. Poselets: Body part detectors trained using 3d human pose annotations. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 1365–1372. [Google Scholar]
- Khan, F.S.; Anwer, R.M.; Van De Weijer, J.; Bagdanov, A.D.; Vanrell, M.; Lopez, A.M. Color attributes for object detection. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3306–3313. [Google Scholar]
- Robinson, G. First to Deploy—Unmanned Aircraft for SAR & Law Enforcement; RPFlightSystems, Inc.: Wimberley, TX, USA, 2012. [Google Scholar]
- Image Scanning Software. Developed to Search for People and Objects Quickly and Effectively. Once Lost. Now Found. Available online: https://loc8.life/ (accessed on 15 August 2021).
- Weldon, W.T.; Hupy, J. Investigating methods for integrating unmanned aerial systems in search and rescue operations. Drones 2020, 4, 38. [Google Scholar] [CrossRef]
- SARUAV. Technology to Support Search for Missing Persons. To Arrive on Time. Available online: https://www.saruav.pl/index-en.html (accessed on 15 August 2021).
- Niedzielski, T. Dronem na ratunek: SARUAV, czyli automatyczna detekcja ludzi na zdjęciach lotniczych. Geodeta 2021, 313, 28–31. [Google Scholar]
- Odnaleziony Dzięki Pomocy Innowacyjnego Programu. Available online: https://radio.rzeszow.pl/wiadomosci/odnaleziony-dzieki-wsparciu-komputerow (accessed on 23 September 2021).
- A Lost Person Is Found!—Spectacular Success of Drones and the SARUAV System. Available online: uni.wroc.pl/en/a-lost-person-is-found-spectacular-success-of-drones-and-the-saruav-system (accessed on 14 August 2021).
- Czekaj, D. Jak geoinformatyka zaczyna wspierać służby zarządzania kryzysowego: SARUAV odnalazł człowieka. Geodeta 2021, 315, 48–49. [Google Scholar]
- International Search & Rescue Incident Database (ISRID). Available online: https://www.dbs-sar.com/SAR_Research/ISRID.htm (accessed on 28 August 2021).
- Chrustek, R. Metoda SPD (Szczegółowego Przeszukania Dróg). Rescue Mag. 2016, 1. [Google Scholar]
- Woidtke, L. Mantrailing at the police of Saxony. Kwart. Policyjny 2016, 3, 74–77. [Google Scholar]
- Niedzielski, T.; Jurecka, M. Can clouds improve the performance of automated human detection in aerial images? Pure Appl. Geophys. 2018, 175, 3343–3355. [Google Scholar] [CrossRef] [Green Version]
- Jurecka, M.; Miziński, B.; Niedzielski, T. Impact of boosting saturation on automatic human detection in imagery acquired by unmanned aerial vehicles. J. Appl. Remote Sens. 2019, 13, 044525. [Google Scholar] [CrossRef]
- Niedzielski, T.; Jurecka, M.; Miziński, B.; Remisz, J.; Ślopek, J.; Spallek, W.; Witek-Kasprzak, M.; Kasprzak, Ł.; Świerczyńska-Chlaściak, M. A real-time field experiment on search and rescue operations assisted by unmanned aerial vehicles. J. Field Robot. 2018, 35, 906–920. [Google Scholar] [CrossRef]
- Imamura, Y.; Okamoto, S.; Lee, J.H. Human tracking by a multi-rotor drone using HOG features and linear SVM on images captured by a monocular camera. In Proceedings of the International MultiConference of Engineers and Computer Scientists, IMECS 2016, Hong Kong, China, 16–18 March 2016; Volume 1, pp. 8–13. [Google Scholar]
- Koester, R.J.; Stooksbury, D.E. Behavioral profile of possible Alzheimer’s disease patients in Virginia search and rescue incidents. Wilderness Environ. Med. 1995, 6, 34–43. [Google Scholar] [CrossRef]
- Adams, A.L.; Schmidt, T.A.; Newgard, C.D.; Federiuk, C.S.; Christie, M.; Scorvo, S.; DeFreest, M. Search is a time-critical event: When search and rescue missions may become futile. Wilderness Environ. Med. 2007, 18, 95–101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tikuisis, P. Predicting survival time for cold exposure. Int. J. Biometeorol. 1995, 39, 94–102. [Google Scholar] [CrossRef]
- Croft, J.L.; Pittman, D.J.; Scialfa, C.C.T. Gaze behavior of spotters during an air-to-ground search. Hum. Factors 2007, 49, 671–678. [Google Scholar] [CrossRef] [PubMed]
- Murphy, R.R.; Pratt, K.S.; Burke, J.L. Crew roles and operational protocols for rotary-wing micro-UAVs in close urban environments. In Proceedings of the 3rd ACM/IEEE international conference on Human robot interaction, Amsterdam, The Netherlands, 12–15 March 2008; pp. 73–80. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).