
The Potential of Moonlight Remote Sensing: A Systematic Assessment with Multi-Source Nightlight Remote Sensing Data




Abstract
:1. Introduction
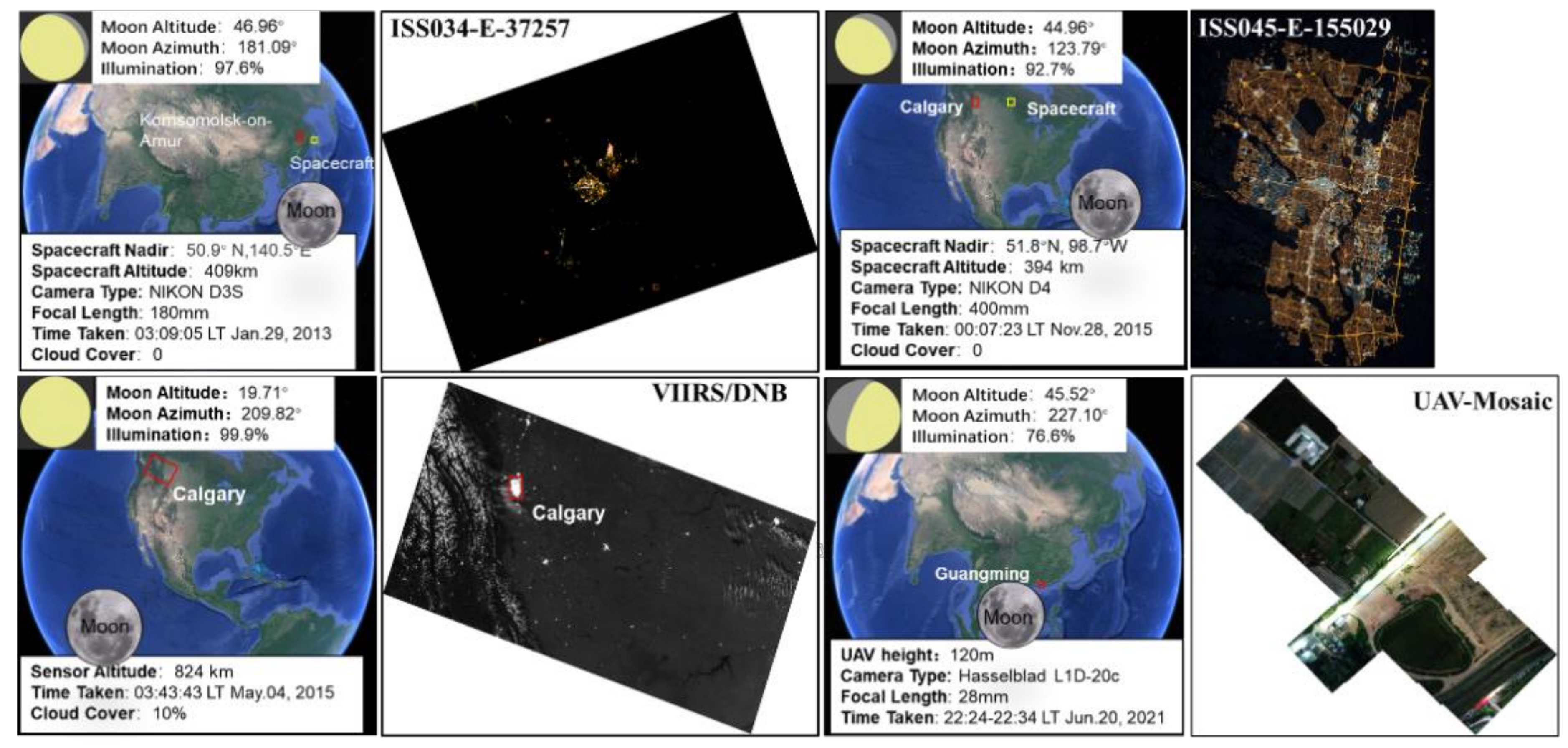
2. Study Area and Data
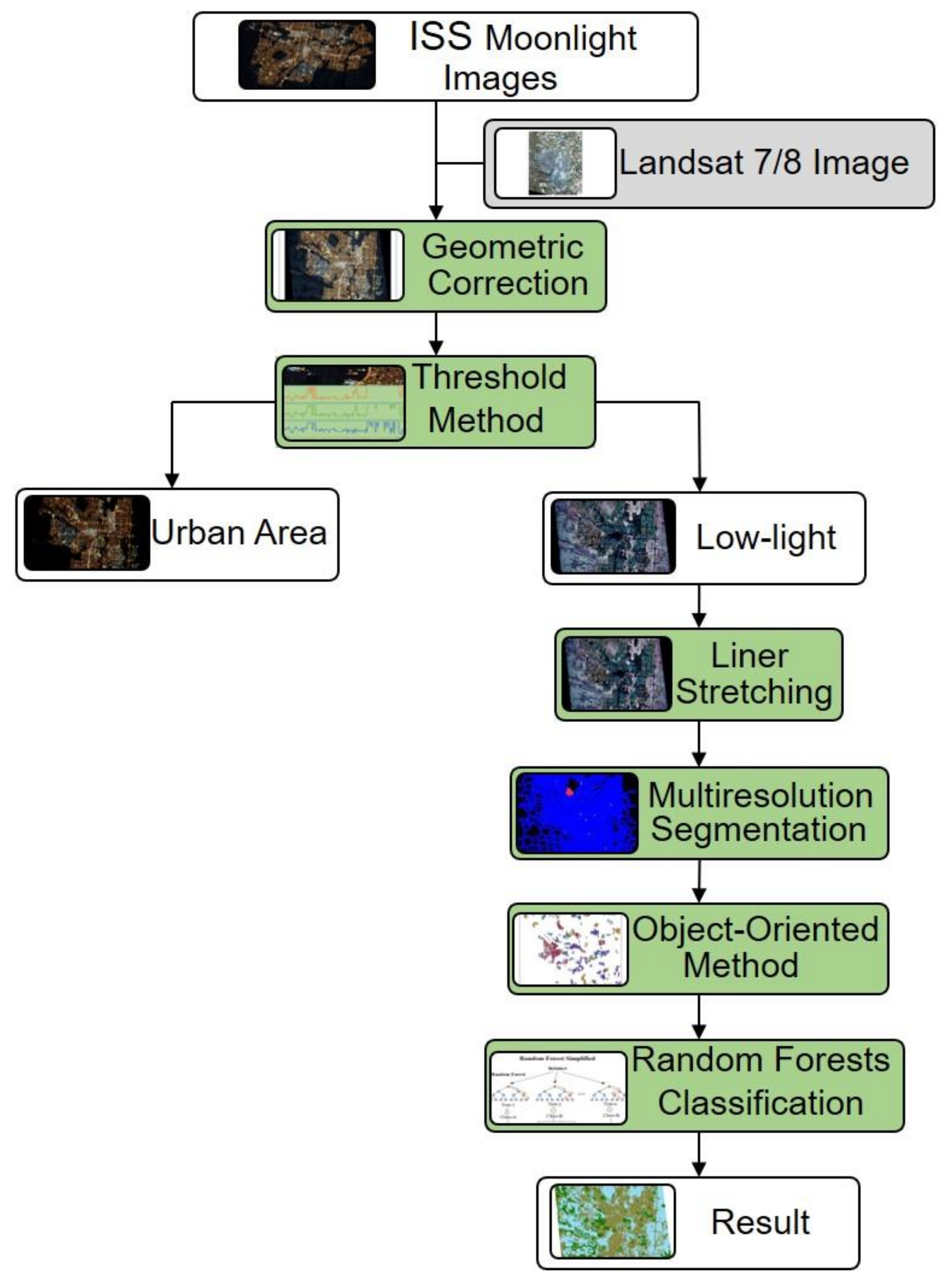
3. Methodology
3.1. Assessment of the ISS Images
3.1.1. Geometric Correction
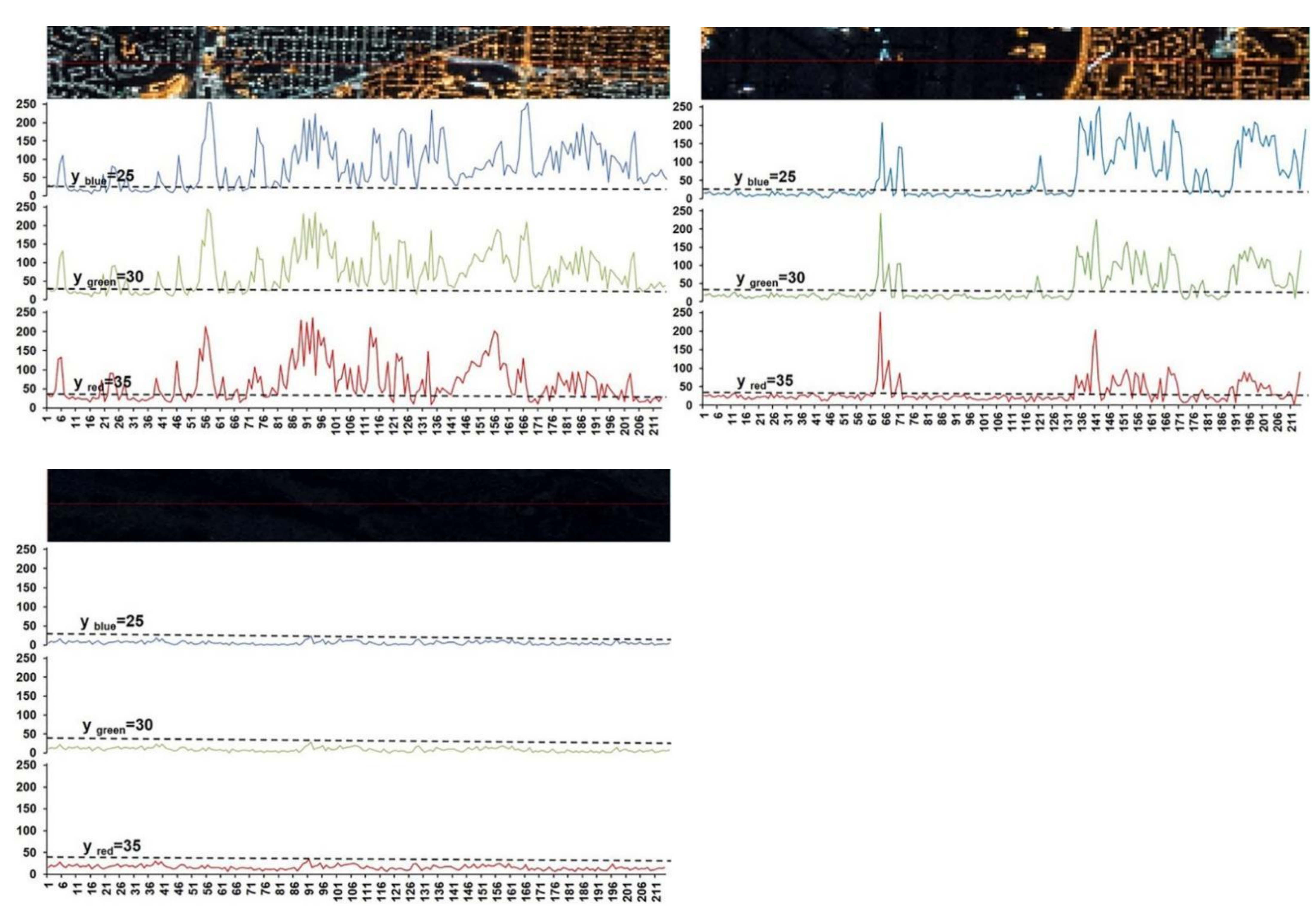
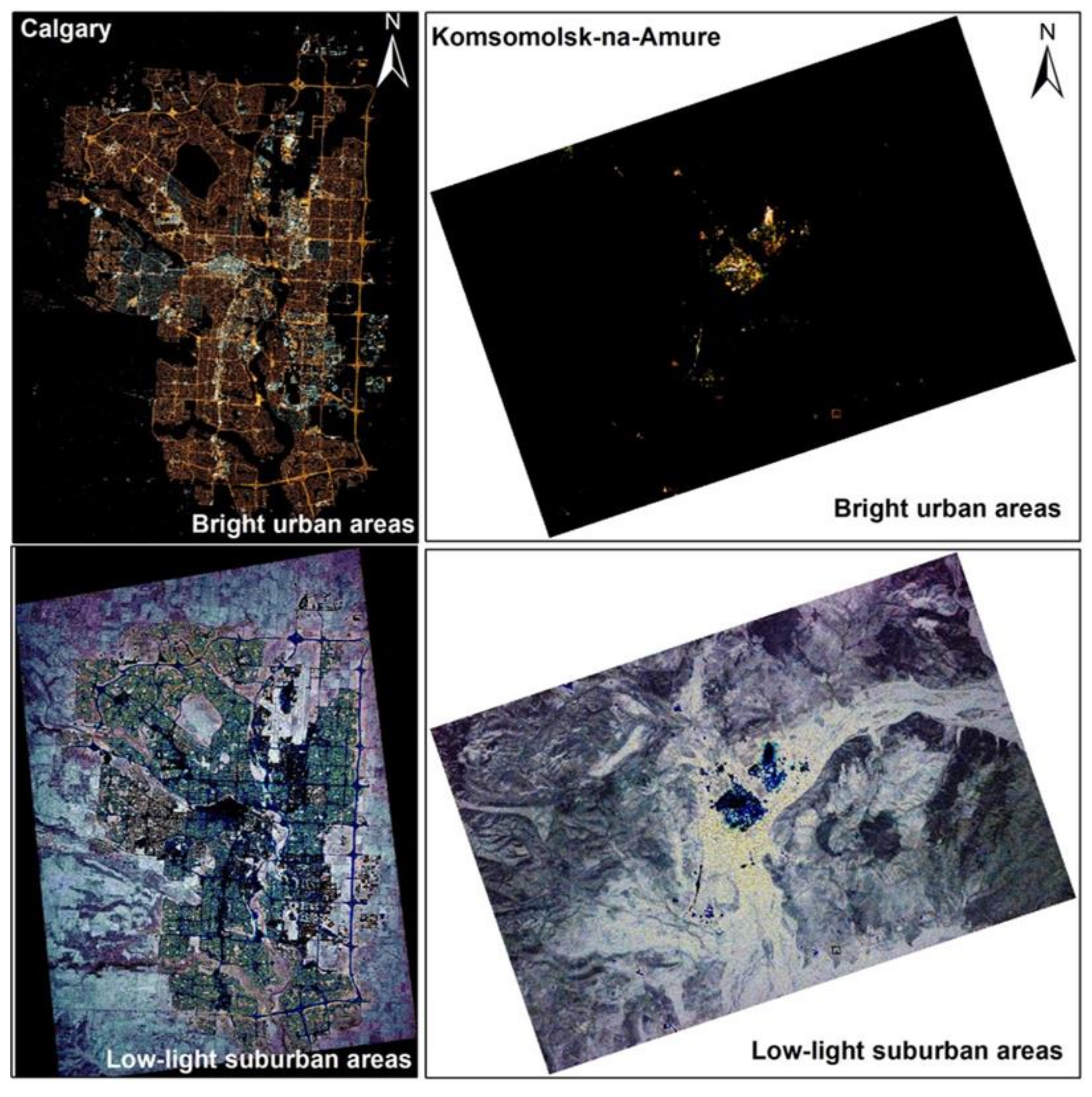
3.1.2. Retrieving the Low-Light Suburban Areas
3.1.3. Multi-Resolution Image Segmentation
3.1.4. Classification with the RF Algorithm
3.2. Assessment of the UAV and VIIRS/DNB Images
4. Results
4.1. The Reliability of the Moonlight Remote Sensing Imagery
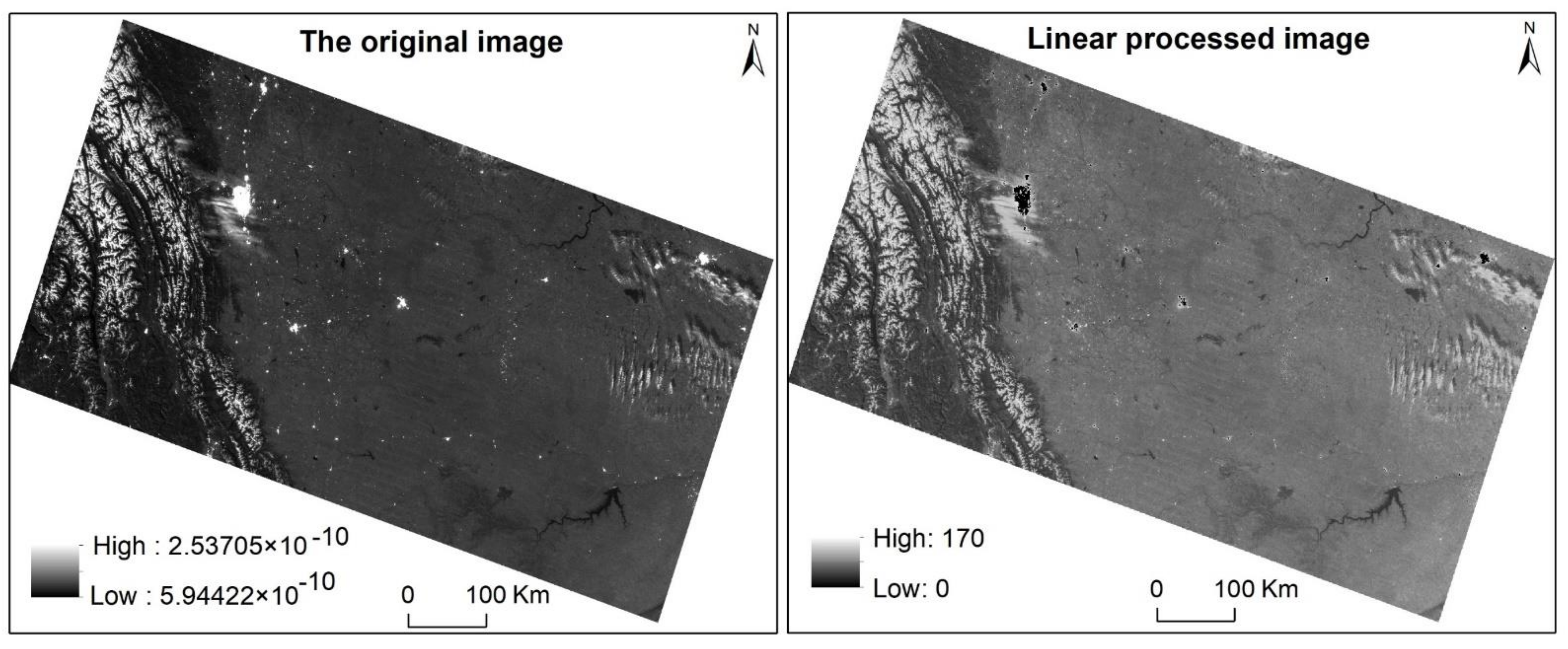
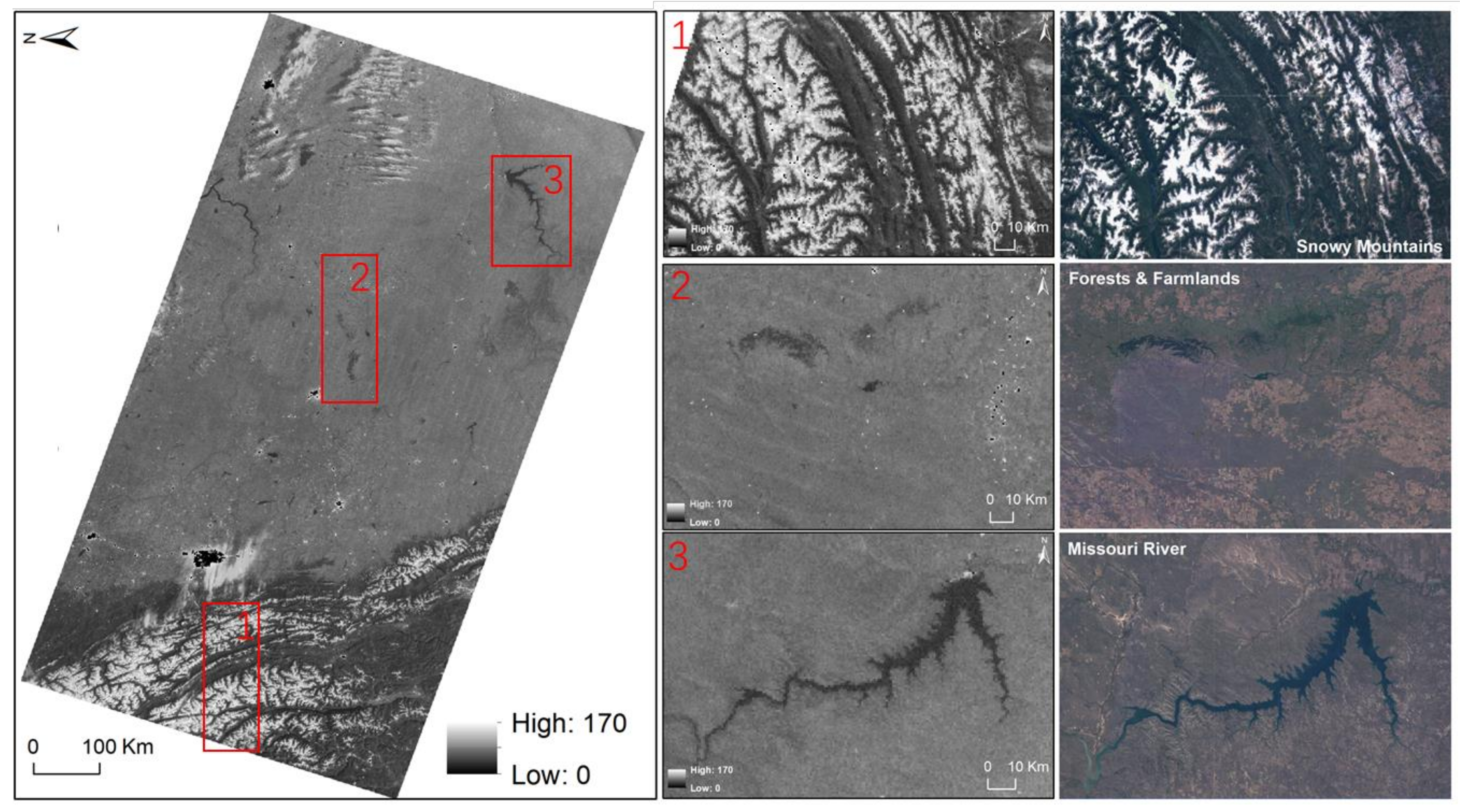
4.1.1. Visual Examination of the VIIRS/DNB Moonlight Image
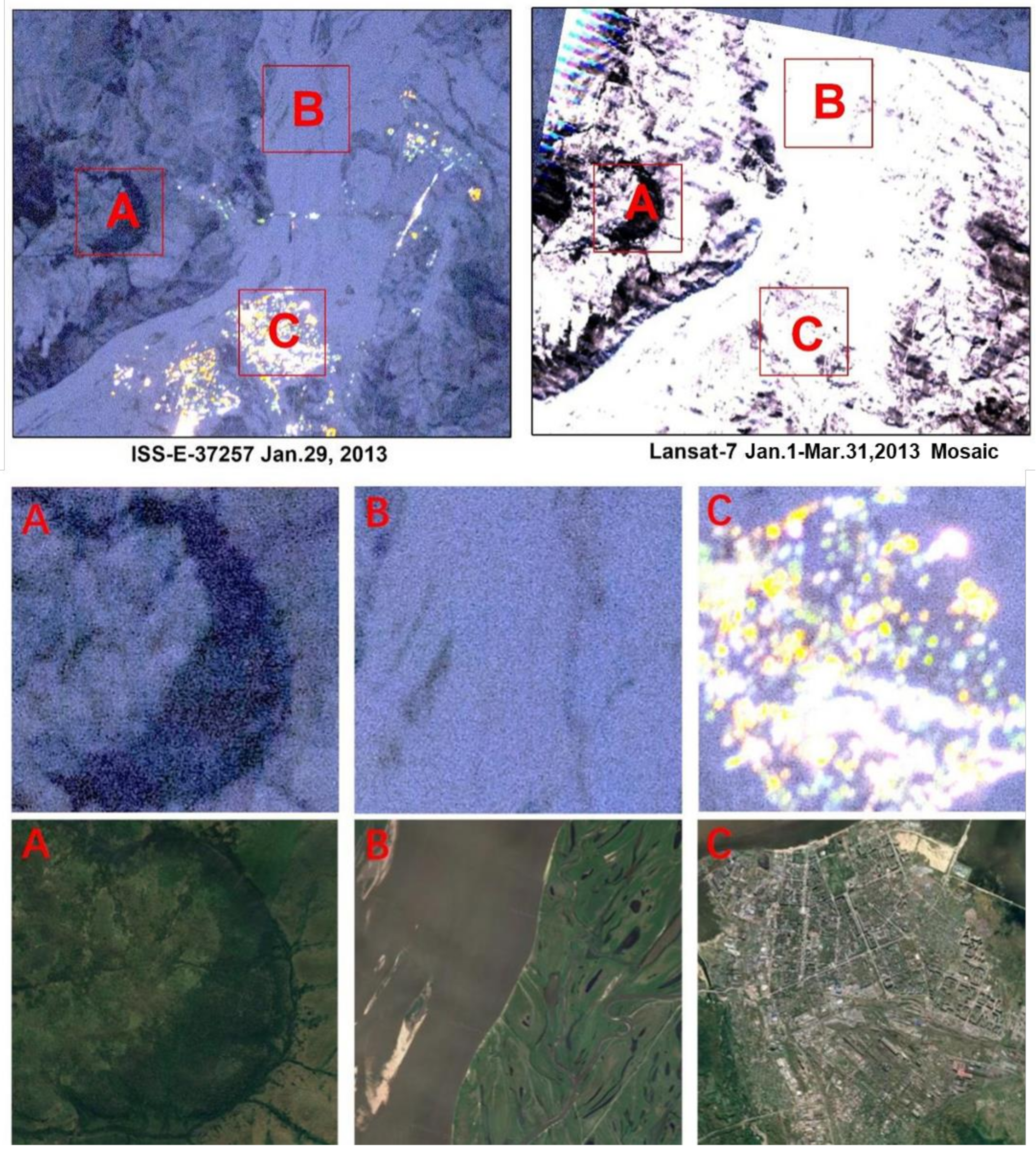
4.1.2. Visual Examination of the ISS Nightlight Imagery
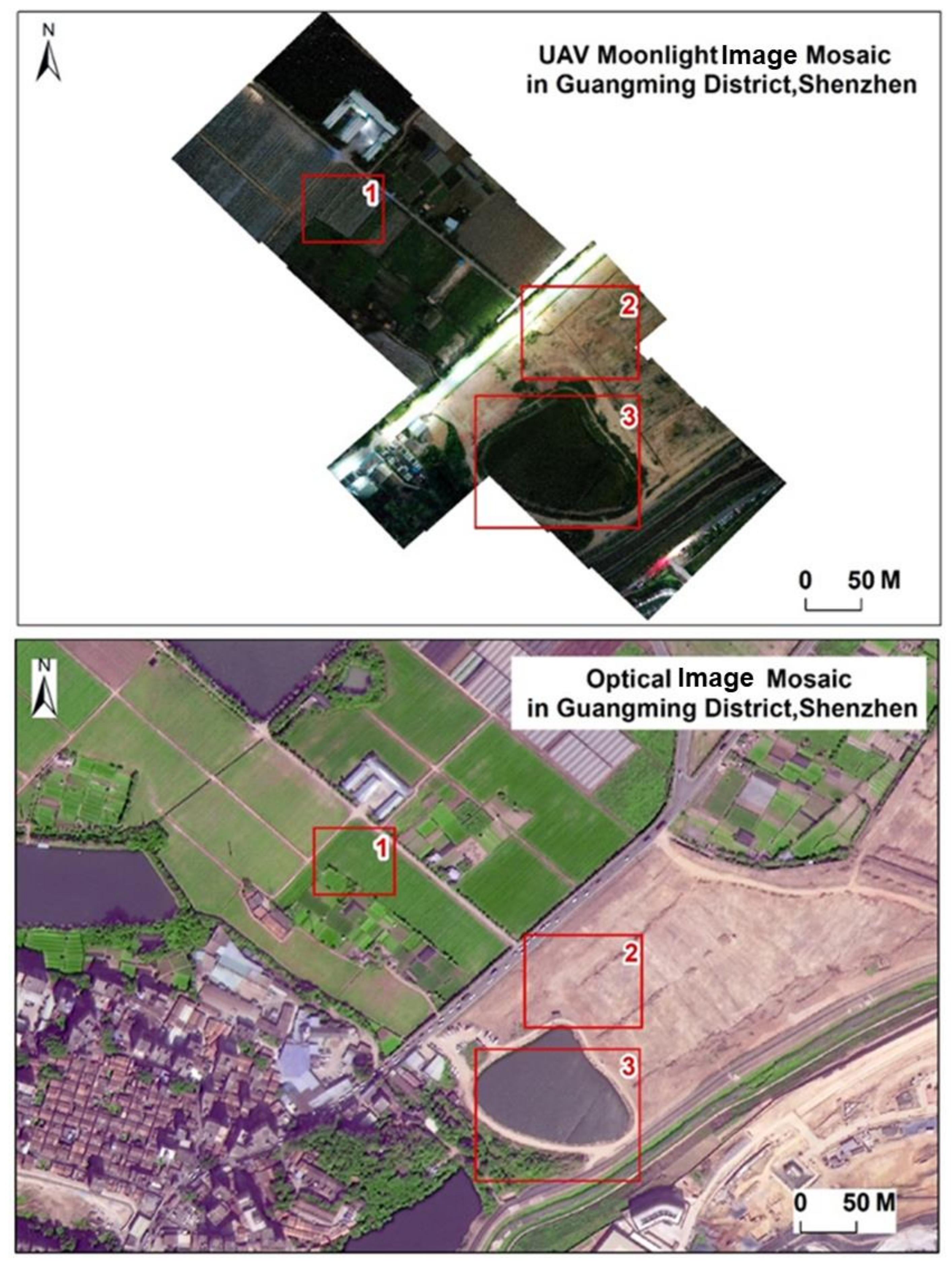
4.1.3. Visual Examination of the UAV Moonlight Image
4.2. Land Surface Classification Results
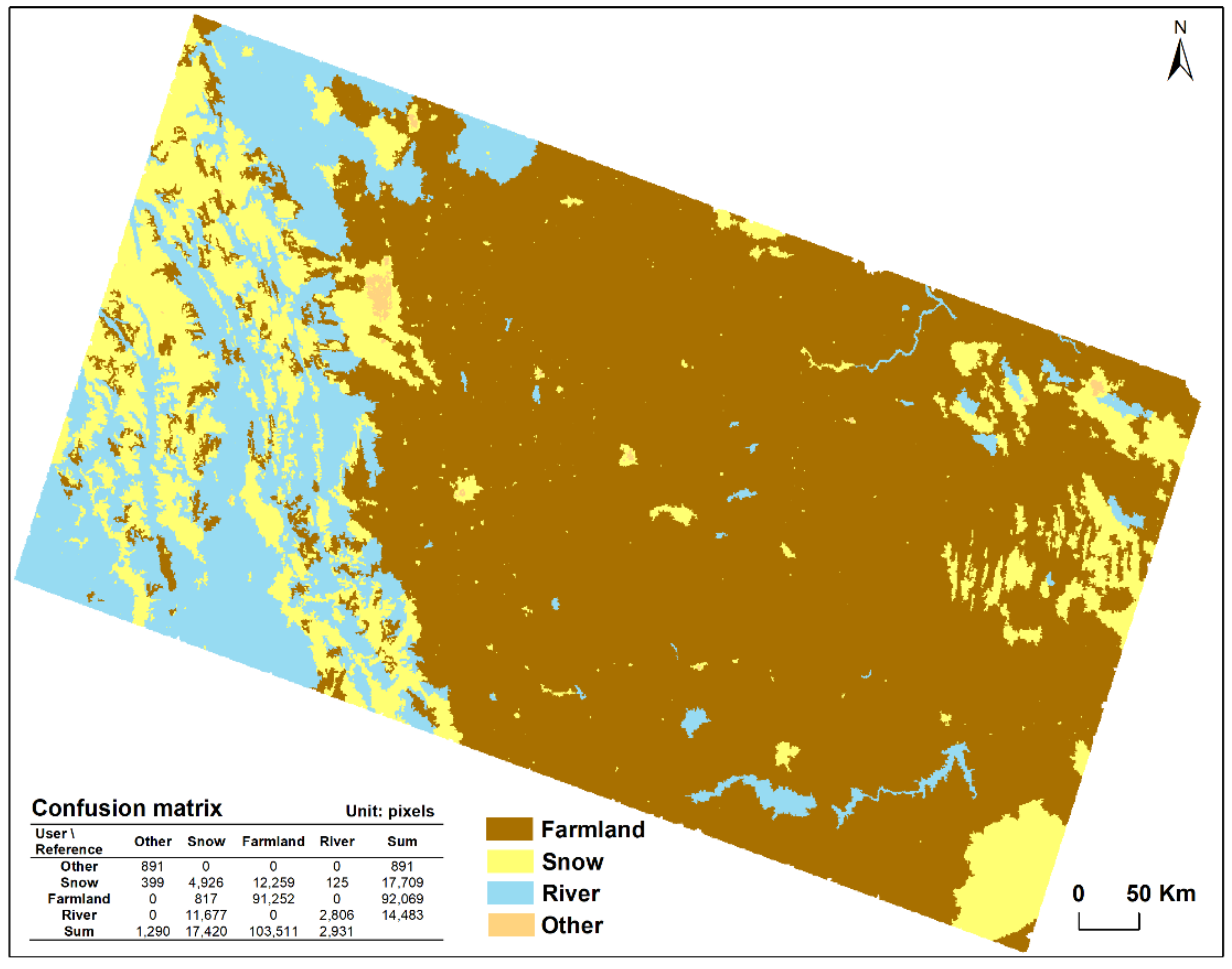
4.2.1. Result with the Mono-Spectral VIIRS/DNB Moonlight Image
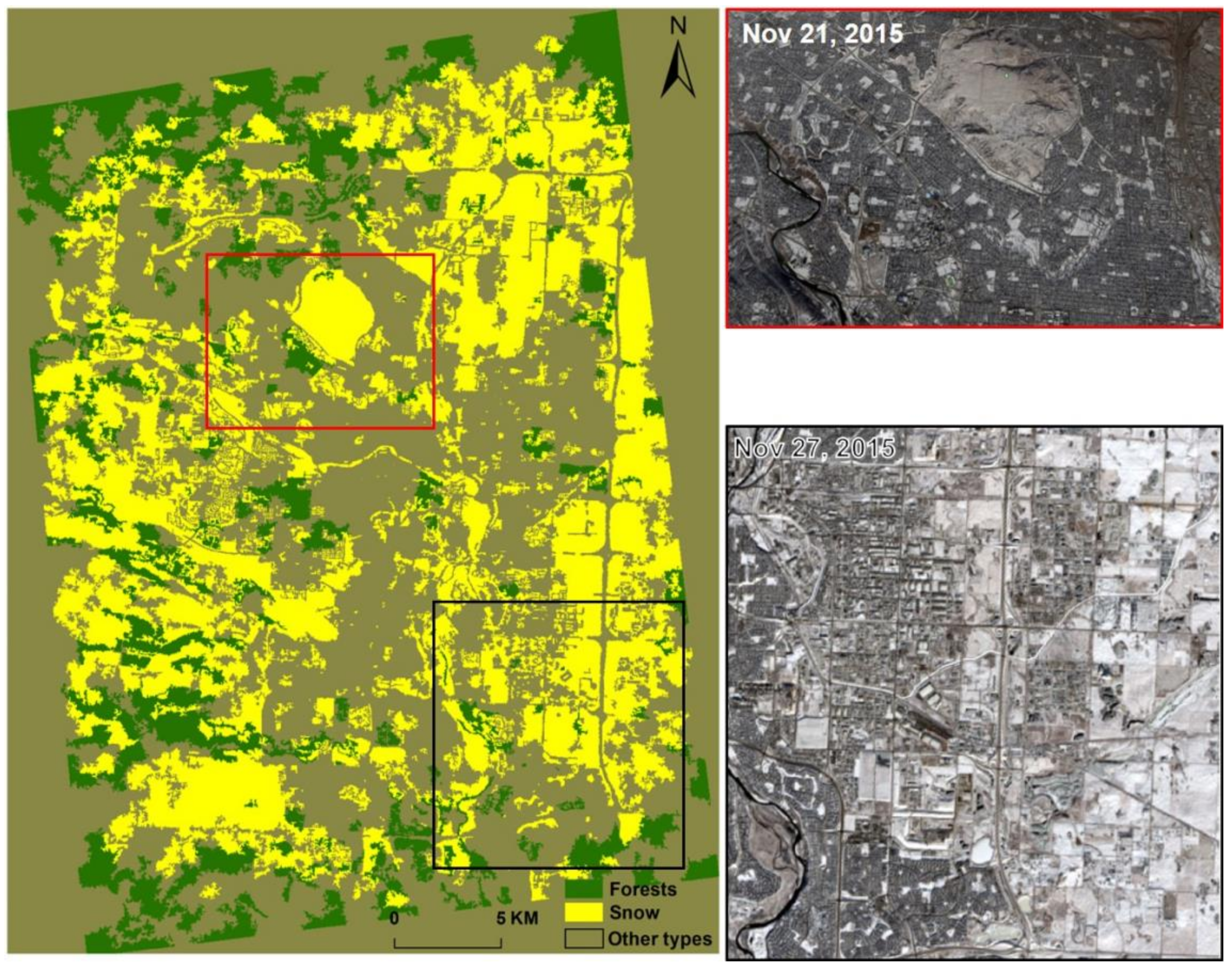
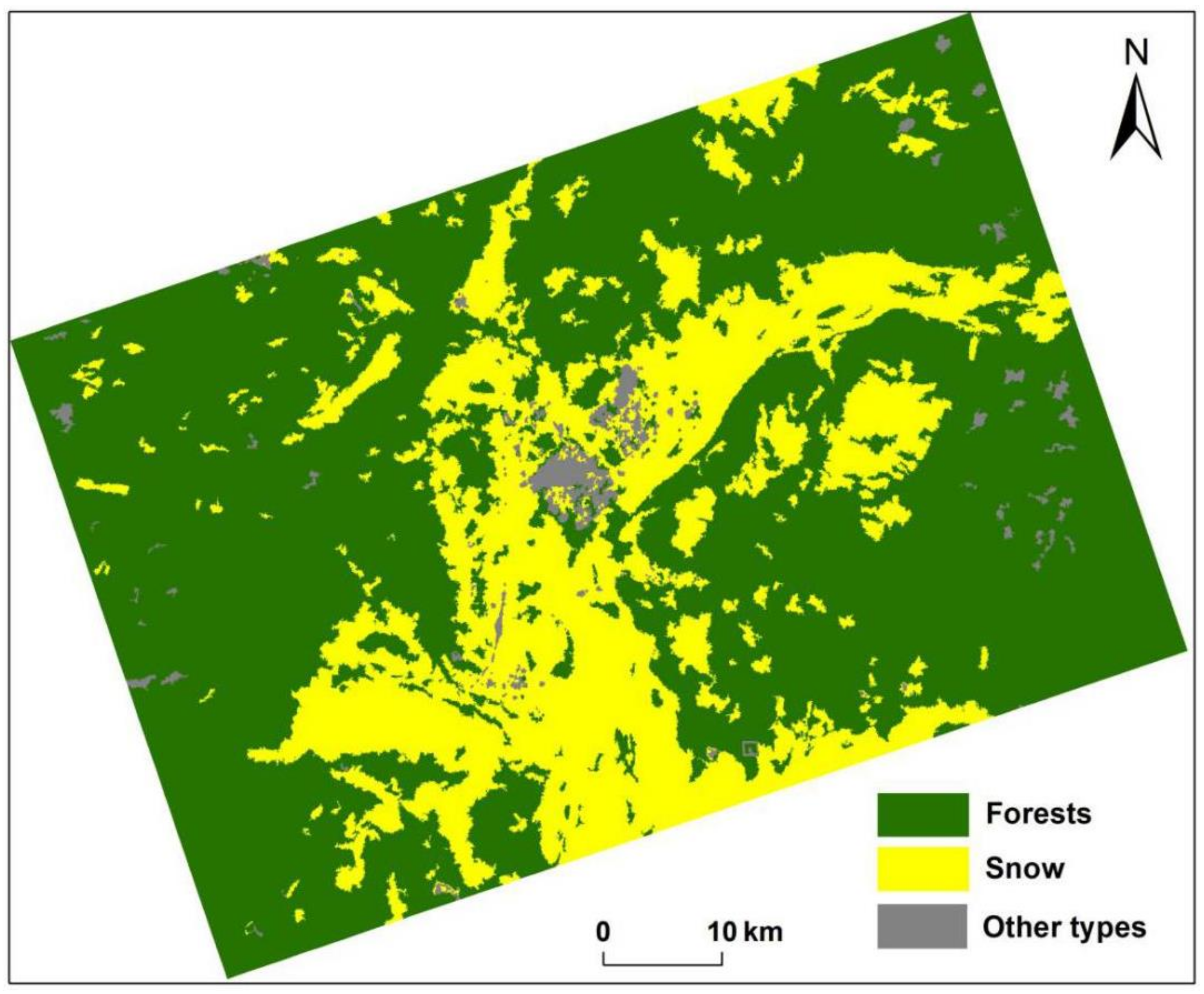
4.2.2. Result with the Multi-Spectral ISS Moonlight Images
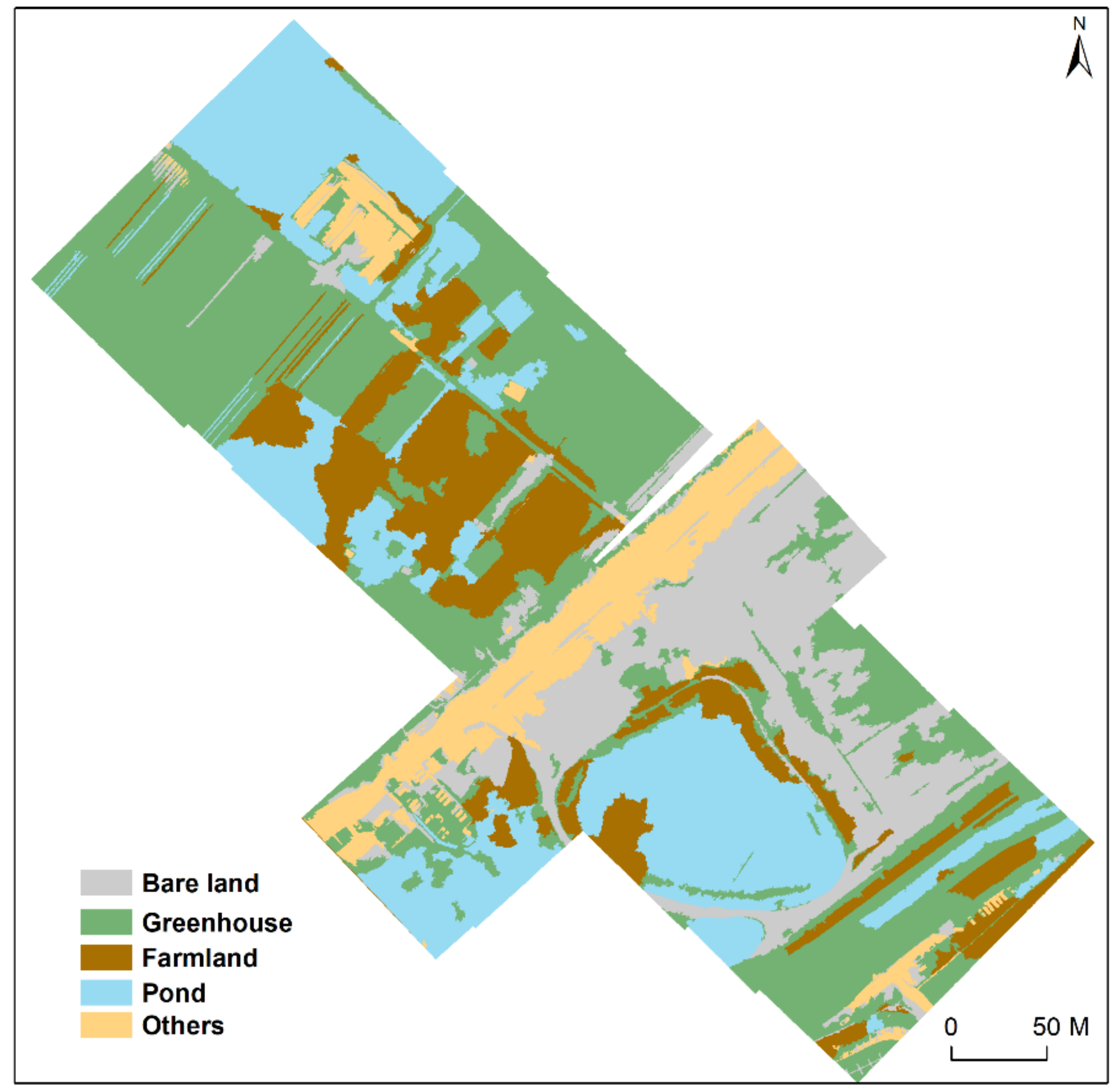
4.2.3. Results with the Multi-Spectral UAV Moonlight Image
4.3. The Characteristics of Current Moonlight Remote Sensing
5. Discussions
5.1. The Potential of Moonlight Remote Sensing to Increase Temporal Resolution
5.2. Technical Speculations for the New Generation of Nightlight Satellite Sensors
5.2.1. Spectral Resolution
5.2.2. Spatial Resolution
5.2.3. Imaging Sensitivity Requirement
6. Conclusions
- (1)
- The reliability of the moonlight remote-sensing imagery.
- (2)
- Land surface classification of moonlight remote-sensing imagery.
- (3)
- The characteristics of current moonlight remote sensing.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sentinel 2 User Handbook. 2015. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/document-library/-/asset_publisher/xlslt4309D5h/content/sentinel-2-user-handbook (accessed on 20 September 2021).
- Guk, E.; Levin, N. Analyzing spatial variability in night-time lights using a high spatial resolution color Jilin-1 image—Je-rusalem as a case study. ISPRS J. Photogramm. Remote Sens. 2020, 163, 121–136. [Google Scholar] [CrossRef]
- Dove Satellite Constellation. 2017. Available online: https://www.satimagingcorp.com/satellite-sensors/other-satellite-sensors/dove-3m/ (accessed on 20 September 2021).
- Miller, S.; Straka, W.; Mills, S.; Elvidge, C.; Lee, T.; Solbrig, J.; Walther, A.; Heidinger, A.; Weiss, S. Illuminating the capabilities of the Suomi National Polar-Orbiting partnership (NPP) visible infrared imaging radiometer suite (VIIRS) day/night band. Remote Sens. 2013, 5, 6717–6766. [Google Scholar] [CrossRef] [Green Version]
- Dvornyk, V.; Vinogradova, O.; Nevo, E. Origin and evolution of circadian clock genes in prokaryotes. Proc. Natl. Acad. Sci. USA 2003, 100, 2495–2500. [Google Scholar] [CrossRef] [Green Version]
- Martino, T.; Arab, S.; Straume, M.; Belsham, D.D.; Tata, N.; Cai, F.; Liu, P.; Trivieri, M.; Ralph, M.; Sole, M.J. Day/night rhythms in gene expression of the normal murine heart. J. Mol. Med. 2004, 82, 256–264. [Google Scholar] [CrossRef] [PubMed]
- Reddy, M.P.M.; Affholder, M. Descriptive Physical Oceanography: State of the Art; Taylor and Francis: Oxfordshire, UK, 2001; p. 249. ISBN 9054107065. [Google Scholar]
- DeCoursey, P.J.; Dunlap, J.C.; Loros, J.J. Chronobiology; Sinauer Associates Inc.: Sunderland, MA, USA, 2003; ISBN 978-0-87893-149-1. [Google Scholar]
- La Sorte, F.A.; Fink, D.; Buler, J.J.; Farnsworth, A.; Cabrera-Cruz, S.A. Seasonal associations with urban light pollution for nocturnally migrating bird populations. Glob. Chang. Biol. 2017, 23, 4609–4619. [Google Scholar] [CrossRef]
- Cabrera-Cruz, S.A.; Smolinsky, J.A.; Buler, J.J. Light pollution is greatest within migration passage areas for nocturnally-migrating birds around the world. Sci. Rep. 2018, 8, 3261. [Google Scholar] [CrossRef] [PubMed]
- Sakai, Y.; Hatta, M.; Furukawa, S.; Kawata, M.; Ueno, N.; Maruyama, S. Environmental factors explain spawning day deviation from full moon in the scleractinian coral Acropora. Biol. Lett. 2020, 16, 20190760. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lovatt, A.; O’Connor, J. Cities and the night-time economy. Plan. Pr. Res. 1995, 10, 127–134. [Google Scholar] [CrossRef]
- Zhang, Q.; Levin, N.; Chalkias, C.; Letu, H. Nighttime Light Remote Sensing–Monitoring Human Societies from Outerspace; Thenkabail, P.S., Ed.; Taylor and Francis Inc.: London, UK, 2015; p. 289e310. [Google Scholar]
- Li, X.; Levin, N.; Xie, J.; Li, D. Monitoring hourly night-time light by an unmanned aerial vehicle and its implications to satellite remote sensing. Remote Sens. Environ. 2020, 247, 111942. [Google Scholar] [CrossRef]
- Goldblatt, R.; Stuhlmacher, M.F.; Tellman, B.; Clinton, N.; Hanson, G.; Georgescu, M.; Wang, C.; Serrano-Candela, F.; Khandelwal, A.K.; Cheng, W.-H.; et al. Using Landsat and nighttime lights for supervised pixel-based image classification of urban land cover. Remote Sens. Environ. 2018, 205, 253–275. [Google Scholar]
- Xie, Y.; Weng, Q.; Fu, P. Temporal variations of artificial nighttime lights and their implications for urbanization in the conterminous United States, 2013–2017. Remote Sens. Environ. 2019, 225, 160–174. [Google Scholar] [CrossRef]
- Zhao, M.; Zhou, Y.; Li, X.; Cheng, W.; Zhou, C.; Ma, T.; Li, M.; Huang, K. Mapping urban dynamics (1992–2018) in Southeast Asia using consistent nighttime light data from DMSP and VIIRS. Remote Sens. Environ. 2020, 248, 111980. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, X.; Asrar, G.R.; Smith, S.; Imhoff, M. A global record of annual urban dynamics (1992–2013) from nighttime lights. Remote Sens. Environ. 2018, 219, 206–220. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhou, Y.; Seto, K.C.; Stokes, E.C.; Deng, C.; Pickett, S.T.; Taubenböck, H. Understanding an urbanizing planet: Strategic directions for remote sensing. Remote Sens. Environ. 2019, 228, 164–182. [Google Scholar] [CrossRef]
- Chen, X.; Nordhaus, W.D. Using luminosity data as a proxy for economic statistics. Proc. Natl. Acad. Sci. USA 2011, 108, 8589–8594. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keola, S.; Andersson, M.; Hall, O. Monitoring economic development from space: Using nighttime light and land cover data to measure economic growth. World Dev. 2015, 66, 322–334. [Google Scholar] [CrossRef]
- Levin, N.; Zhang, Q. A global analysis of factors controlling VIIRS nighttime light levels from densely populated areas. Remote Sens. Environ. 2017, 190, 366–382. [Google Scholar] [CrossRef] [Green Version]
- Yu, B.; Shi, K.; Hu, Y.; Huang, C.; Chen, Z.; Wu, J. Poverty evaluation using NPP-VIIRS nighttime light composite data at the county level in China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1217–1229. [Google Scholar] [CrossRef]
- Chen, T.-H.K.; Prishchepov, A.V.; Fensholt, R.; Sabel, C. Detecting and monitoring long-term landslides in urbanized areas with nighttime light data and multi-seasonal Landsat imagery across Taiwan from 1998 to 2017. Remote Sens. Environ. 2019, 225, 317–327. [Google Scholar] [CrossRef]
- Román, M.O.; Stokes, E.C.; Shrestha, R.; Wang, Z.; Schultz, L.; Carlo, E.A.S.; Sun, Q.; Bell, J.; Molthan, A.; Kalb, V.; et al. Satellite-based assessment of electricity restoration efforts in Puerto Rico after Hurricane Maria. PLoS ONE 2019, 14, e0218883. [Google Scholar] [CrossRef]
- Zhao, X.; Yu, B.; Liu, Y.; Yao, S.; Lian, T.; Chen, L.; Yang, C.; Chen, Z.; Wu, J. NPP-VIIRS DNB daily data in natural disaster assessment: Evidence from selected case studies. Remote Sens. 2018, 10, 1526. [Google Scholar] [CrossRef] [Green Version]
- Kyba, C.C.M.; Aronson, K.J. Assessing exposure to outdoor lighting and health risks. Epidemiology 2015, 26, e50. [Google Scholar] [CrossRef] [PubMed]
- Kyba, C.C.M. Is light pollution getting better or worse? Nat. Astron. 2018, 2, 267–269. [Google Scholar] [CrossRef]
- Lunn, R.M.; Blask, D.E.; Coogan, A.N.; Figueiro, M.G.; Gorman, M.R.; Hall, J.E.; Hansen, J.; Nelson, R.J.; Panda, S.; Smolensky, M.H.; et al. Health consequences of electric lighting practices in the modern world: A report on the National Toxicology Program’s workshop on shift work at night, artificial light at night, and circadian disruption. Sci. Total Environ. 2017, 607, 1073–1084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Croft, T.A. Nighttime images of the earth from space. Sci. Am. 1978, 239, 86–98. [Google Scholar] [CrossRef]
- Elvidge, C.D.B.; Dietz, K.E.; Bland, J.B.; Sutton, T.; Kroehl, P.C. Radiance calibration of DMSP-OLS low-light imaging data of human settlements. Remote Sens. Environ. 1999, 68, 77–88. [Google Scholar] [CrossRef]
- Román, M.O.; Wang, Z.; Sun, Q.; Kalb, V.; Miller, S.D.; Molthan, A.; Schultz, L.; Bell, J.; Stokes, E.C.; Pandey, B.; et al. NASA’s Black Marble nighttime lights product suite. Remote Sens. Environ. 2018, 210, 113–143. [Google Scholar] [CrossRef]
- Miller, S.D.; Mills, S.P.; Elvidge, C.D.; Lindsey, D.; Lee, T.F.; Hawkins, J.D. Suomi satellite brings to light a unique frontier of nighttime environmental sensing capabilities. Proc. Natl. Acad. Sci. USA 2012, 109, 15706–15711. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miller, S.D.; Turner, R.E. A dynamic lunar spectral irradiance data set for NPOESS/VIIRS day/night band nighttime environmental applications. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2316–2329. [Google Scholar] [CrossRef]
- Calgary Industries. Calgary Economic Development. Archived from the original on 18 February 2014. Retrieved 31 January 2014. Available online: https://www.calgaryeconomicdevelopment.com/industries (accessed on 20 September 2021).
- Population and Dwelling Counts, for Canada, Provinces and Territories, and Census Subdivisions (Municipalities), 2011 and 2006 censuses (Alberta). Statistics Canada. 8 February 2012. Available online: https://www12.statcan.gc.ca/census-recensement/2016/dp-pd/hlt-fst/pd-pl/Table.cfm?Lang=Eng&T=801&SR=1&S=3&O=D&RPP=100&PR=48&CMA=0#tPopDwell (accessed on 20 September 2021).
- Russian Federal State Statistics Service. Bcepoccийcкaя пepeпиcь нaceлeния 2010 гoдa. Toм 1. Bcepoccийcкaя пepeпиcь нaceлeния 2010 гoдa; Federal State Statistics Service: Moscow, Russia, 2011; Available online: http://government.ru/en/department/456/ (accessed on 20 September 2021).
- Guangming District. Retrieved 2018-05-25. Available online: https://en.wikipedia.org/wiki/Guangming_District (accessed on 20 September 2021).
- Sánchez de Miguel, A.; Zamorano, J.; Pascual, S.; López Cayuela, M.; Ocaña, F.; Challupner, P.; de Miguel, E. ISS nocturnal images as a scientific tool against light pollution: Flux calibration and colors. In Highlights of Spanish Astrophysics VII; Springer: Berlin, Germany, 2013; Volume 1, pp. 916–919. [Google Scholar]
- Anderson, S.J.; Tuttle, B.T.; Powell, R.L.; Sutton, P. Characterizing relationships between population density and nighttime imagery for Denver, Colorado: Issues of scale and representation. Int. J. Remote Sens. 2010, 31, 5733–5746. [Google Scholar] [CrossRef]
- De Miguel, A.S.; Castaño, J.G.; Zamorano, J.; Pascual, S.; Ángeles, M.; Cayuela, L.; Martinez, G.M.; Challupner, P.; Kyba, C.C.M. Atlas of astronaut photos of Earth at night. Astron. Geophys. 2014, 55. [Google Scholar] [CrossRef] [Green Version]
- Kotarba, A.Z.; Aleksandrowicz, S. Impervious surface detection with nighttime photography from the International Space Station. Remote Sens. Environ. 2016, 176, 295–307. [Google Scholar] [CrossRef]
- Schueler, C.F.; Clement, J.E.; Ardanuy, P.E.; Welsch, C.; Deluccia, F.; Swenson, H. NPOESS VIIRS sensor design overview. In Proceedings of the International Symposium on Optical Science and Technology, San Diego, CA, USA, 29 July–3 August 2001; pp. 11–23. [Google Scholar]
- Elvidge, C.D.; Baugh, K.; Zhizhin, M.; Hsu, F.C.; Ghosh, T. VIIRS night-time lights. Int. J. Remote Sens. 2017, 38, 5860–5879. [Google Scholar] [CrossRef]
- Levin, N.; Kyba, C.C.; Zhang, Q.; de Miguel, A.S.; Román, M.O.; Li, X.; Portnov, B.A.; Molthan, A.L.; Jechow, A.; Miller, S.D.; et al. Remote sensing of night lights: A review and an outlook for the future. Remote Sens. Environ. 2020, 237, 111443. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring Google earth engine platform for big data processing: Classification of multi-temporal satellite imagery for crop mapping. Front. Earth Sci. 2017, 5, 5. [Google Scholar] [CrossRef] [Green Version]
- De Miguel, A.S.; Kyba, C.C.; Aubé, M.; Zamorano, J.; Cardiel, N.; Tapia, C.; Bennie, J.; Gaston, K.J. Colour remote sensing of the impact of artificial light at night (I): The potential of the International Space Station and other DSLR-based platforms. Remote Sens. Environ. 2019, 224, 92–103. [Google Scholar] [CrossRef]
- De Miguel, A.S.; Kyba, C.C.; Aubé, M.; Zamorano, J.; Cardiel, N.; Tapia, C.; Bennie, J.; Gaston, K.J. Colour remote sensing of the impact of artificial light at night (II): Calibration of DSLR-based images from the International Space Station. Remote Sens. Environ. 2021, 264, 112611. [Google Scholar] [CrossRef]
- Jiao, X.; Kovacs, J.; Shang, J.; McNairn, H.; Walters, D.; Ma, B.; Geng, X. Object-oriented crop mapping and monitoring using multi-temporal polarimetric RADARSAT-2 data. ISPRS J. Photogramm. Remote Sens. 2014, 96, 38–46. [Google Scholar] [CrossRef]
- Baatz, M.; Benz, U.; Dehghani, S.; Heynen, M.; Höltje, A.; Hofmann, P.; Lingenfelder, I.; Mimler, M.; Sohlbach, M.; Weber, M. eCognition professional user guide. UNBC GIS Lab. 2004, 4, 72. [Google Scholar]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Cao, X.; Chen, J.; Imura, H.; Higashi, O. A SVM-based method to extract urban areas from DMSP-OLS and SPOT VGT data. Remote Sens. Environ. 2009, 113, 2205–2209. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.-O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ. 2012, 118, 21–39. [Google Scholar] [CrossRef]
- Liu, D.; Qi, Z.; Zhang, H.; Li, X.; Yeh, A.G.O.; Wang, J. Investigation of the capability of multitemporal RADARSAT-2 fully polarimetric SAR images for land cover classification: A case of Panyu, Guangdong province. Eur. J. Remote Sens. 2021, 54, 338–350. [Google Scholar] [CrossRef]
- Du, P.; Samat, A.; Waske, B.; Liu, S.; Li, Z. Random forest and rotation forest for fully polarized SAR image classification using polarimetric and spatial features. ISPRS J. Photogramm. Remote Sens. 2015, 105, 38–53. [Google Scholar] [CrossRef]
- Sabbatini, M. NightPod-Nodding Mechanism for the ISS. Technical Report; European Space Agency: Noordwijk, The Netherlands, 2014. [Google Scholar]
- Elvidge, C.D.; Cinzano, P.; Pettit, D.R.; Arvesen, J.; Sutton, P.; Small, C.; Nemani, R.; Longcore, T.; Rich, C.; Safran, J.; et al. The Nightsat mission concept. Int. J. Remote Sens. 2007, 28, 2645–2670. [Google Scholar] [CrossRef]
- De Meester, J.; Storch, T. Optimized performance parameters for nighttime multispectral satellite imagery to analyze lightings in urban areas. Sensors 2020, 20, 3313. [Google Scholar] [CrossRef]
- Barentine, J.C.; Walczak, K.; Gyuk, G.; Tarr, C.; Longcore, T. A case for a new satellite mission for remote sensing of night lights. Remote Sens. 2021, 13, 2294. [Google Scholar] [CrossRef]
- Cheng, B.; Chen, Z.; Yu, B.; Li, Q.; Wang, C.; Li, B.; Wu, B.; Li, Y.; Wu, J. Automated extraction of street lights from JL1-3B nighttime light data and assessment of their solar energy potential. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 675–684. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, B.; Thau, D.; Moore, R. Building a better urban picture: Combining day and night remote sensing imagery. Remote Sens. 2015, 7, 11887–11913. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Date | LT | Lat°, Lon° | Camera | Len | City |
|---|---|---|---|---|---|---|
| VIIRS/DNB | 4 May 2015 | 03:43:43 | 51.03, −114.03 | CCD | 500–900 nm | Calgary |
| ISS034-E-37257 | 29 January 2013 | 03:09:05 | 50.5, 137.5 | Nikon D3S | 180 mm | Komsomolsk |
| ISS045-E-155029 | 28 November 2015 | 00:07:23 | 51.03, −114.03 | Nikon D4 | 400 mm | Calgary |
| UAV-Mosaic | 20 June 2021 | 22:24–22:34 | 22.48, 113.56 | Hasselblad L1D-20c | 35 mm | Guangming |
| ID | Geometric Correction | Threshold Values | Multi-Resolution Segmentation (Low-Light Areas) | Samples | Classification Method |
|---|---|---|---|---|---|
| ISS034-E-37257 | Landsat-7 | 50, 50, 45 | 40 | 100, 100 | RF |
| ISS045-E-155029 | Landsat-8 | 35, 30, 25 | 50 | 76, 86 | RF |
| ID | Geometric Correction | Threshold Values | Multi-Resolution Segmentation (Low-Light Areas) | Samples | Classification Method |
|---|---|---|---|---|---|
| VIIRS/DNB | Landsat-8 | 1.7 × 10−8 | 20 | 93, 96 | RF |
| UAV-Mosaic | SuperView-1 | - | 200 | 113, 113 | RF |
| ID | Camera | Len | ISO | Exposure | AV | Distance | WB |
|---|---|---|---|---|---|---|---|
| ISS026-E-12438 | Nikon D3S | 180 mm | 12,800 | 1/15S | F/2.8 | 409 KM | Auto-adjustment |
| ISS045-E-155029 | Nikon D4 | 400 mm | 10,000 | 1/25S | F/2.8 | 394 KM | Auto-adjustment |
| UAV-Mosaic | Hasselblad L1D-20c | 28 mm | 3200 | 1S | F/2.8 | 120 M | Auto-adjustment |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Zhang, Q.; Wang, J.; Wang, Y.; Shen, Y.; Shuai, Y. The Potential of Moonlight Remote Sensing: A Systematic Assessment with Multi-Source Nightlight Remote Sensing Data. Remote Sens. 2021, 13, 4639. https://doi.org/10.3390/rs13224639
Liu D, Zhang Q, Wang J, Wang Y, Shen Y, Shuai Y. The Potential of Moonlight Remote Sensing: A Systematic Assessment with Multi-Source Nightlight Remote Sensing Data. Remote Sensing. 2021; 13(22):4639. https://doi.org/10.3390/rs13224639
Chicago/Turabian StyleLiu, Di, Qingling Zhang, Jiao Wang, Yifang Wang, Yanyun Shen, and Yanmin Shuai. 2021. "The Potential of Moonlight Remote Sensing: A Systematic Assessment with Multi-Source Nightlight Remote Sensing Data" Remote Sensing 13, no. 22: 4639. https://doi.org/10.3390/rs13224639
APA StyleLiu, D., Zhang, Q., Wang, J., Wang, Y., Shen, Y., & Shuai, Y. (2021). The Potential of Moonlight Remote Sensing: A Systematic Assessment with Multi-Source Nightlight Remote Sensing Data. Remote Sensing, 13(22), 4639. https://doi.org/10.3390/rs13224639