1. Introduction
Light Detection and Ranging (LiDAR) systems provide a fast and accurate technology for three-dimensional (3D) spatial data acquisition. Compared with microwave imaging, LiDAR has higher resolution, better concealment and stronger anti-interference ability [
1]. Moreover, it has the potential for collecting a massive amount of data and is easy to update with low personal requirements. In addition, LiDAR imaging results are closer to optical images, which makes the imaging results easier to interpret and thereby can carry out image fusion of optical images obtained by visible light cameras. Therefore, LiDAR technology is showing great potential in mapping tunnels, forestry projects, military, driverless technology, power transmission project, traffic pipeline design, water conservancy project and digital city projects [
2].
Frequency modulation continuous wave (FMCW) LiDAR combines LiDAR and FMCW technologies [
3,
4]. FMCW LiDAR has high ranging precision with low power cost because of the coherent detection of FMCW, and it has broad applications in ranging and 3D imaging. However, the LiDAR platform usually suffers from vibration during the whole observation process in which the local vibrations in a single period can be approximated as a movement containing the accelerating or decelerating movement in one direction. In the subsequent parts, we shortly name the local vibration movement (i.e., accelerating/decelerating movement) as the “vibration”, and name the ranging error caused by the local vibration movement as the "vibration error". However, as the wavelength of the laser is very short, the vibrations on the order of micron will disturb the range measurement [
5] and affect the density of points per unit area, thus affecting the subsequent 3D imaging and target recognition [
6,
7]. Therefore, research on vibration compensation methods is of great significance for the range measurement and imaging of FMCW LiDAR.
At present, there are two main kinds of approaches to reduce the impact of vibrations on ranging [
8,
9]. One approach is to compensate for the vibration errors by changing the hardware design, such as adding another laser or velocity measuring equipment. Kakuma et al. applied two vertical cavity surface lasers with opposite frequency swept directions to a basic ranging system and then compensated for the vibration errors by averaging the phase shift of the two received signals [
10]. Krause et al. proposed a new LiDAR system that contains two lasers, in which one laser has a constant transmitted frequency and the other has modulated transmitted frequency. Then they compensated for the vibration errors by establishing mathematical relations of the received signals obtained from the two lasers [
11]. Lu et al. [
12] introduced a Doppler velocimeter to the basic FMCW LiDAR ranging system, which can measure the Doppler frequency shift introduced by vibrations and thereby estimate the absolute range of the target. The above methods change hardware designs of the basic LiDAR system and achieve good performance in range measurement under a vibrating environment, but they increase the complexity of the LiDAR systems especially those installed on aircraft.
To reduce the load of hardware, the other approach established mathematical relations by using the collected echo signals, after which the vibration errors can be eliminated and the range of the target can be accurately estimated. Tao et al. [
13] used a laser with tunable transmitted frequency, and then the LiDAR system collects successive echo signals with different modulation directions. A Kalman filter (KF) method was applied to multiple-period echo signals to eliminate the disturbance of vibrations on range measurements. Jia et al. [
14] used a time-varying KF method to the received echo signals obtained by traditional range measurement systems, achieving better-ranging accuracy. However, the KF methods in [
13] and [
14] needed many measurement results to predict the actual range of the target, so it requires a long observation time. However, FMCW LiDAR 3D imaging uses a laser scanner to dynamically measure the range of the target, and the observation time of a single measurement spot is short, which does not meet the requirements of the above methods. Wang et al. [
8] and [
9] proposed an instantaneous ranging model which can provide sufficient measurement results with a single-period observation for time-varying vibration compensation, but this model is computationally expensive. Huang et al. [
5] adopted a dot-linear modulated frequency signal waveform for detection, which achieves both velocity and range information in the same period. Swinkels et al. [
15] proposed a three-point method to compensate for vibrations and it only requires one laser that transmits triangular frequency swept signals. The vibration errors can be effectively removed through comprehensive processing of the received signals obtained from the up and down observations. The three-point method only needs a one-period signal, but it is less effective for noisy signals. The Doppler frequency shift method can eliminate the vibration errors by using a single-period echo signal of FMCW LiDAR under the assumption of constant vibration velocity [
16]. However, for the FMCW LiDAR system especially that installed on an airborne platform, the vibration frequency can be up to several hundred hertz and the vibration velocity are time-varying. Therefore, the Doppler frequency shift method is less accurate for errors caused by time-varying vibration velocity.
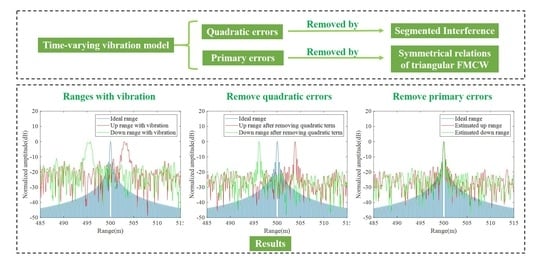
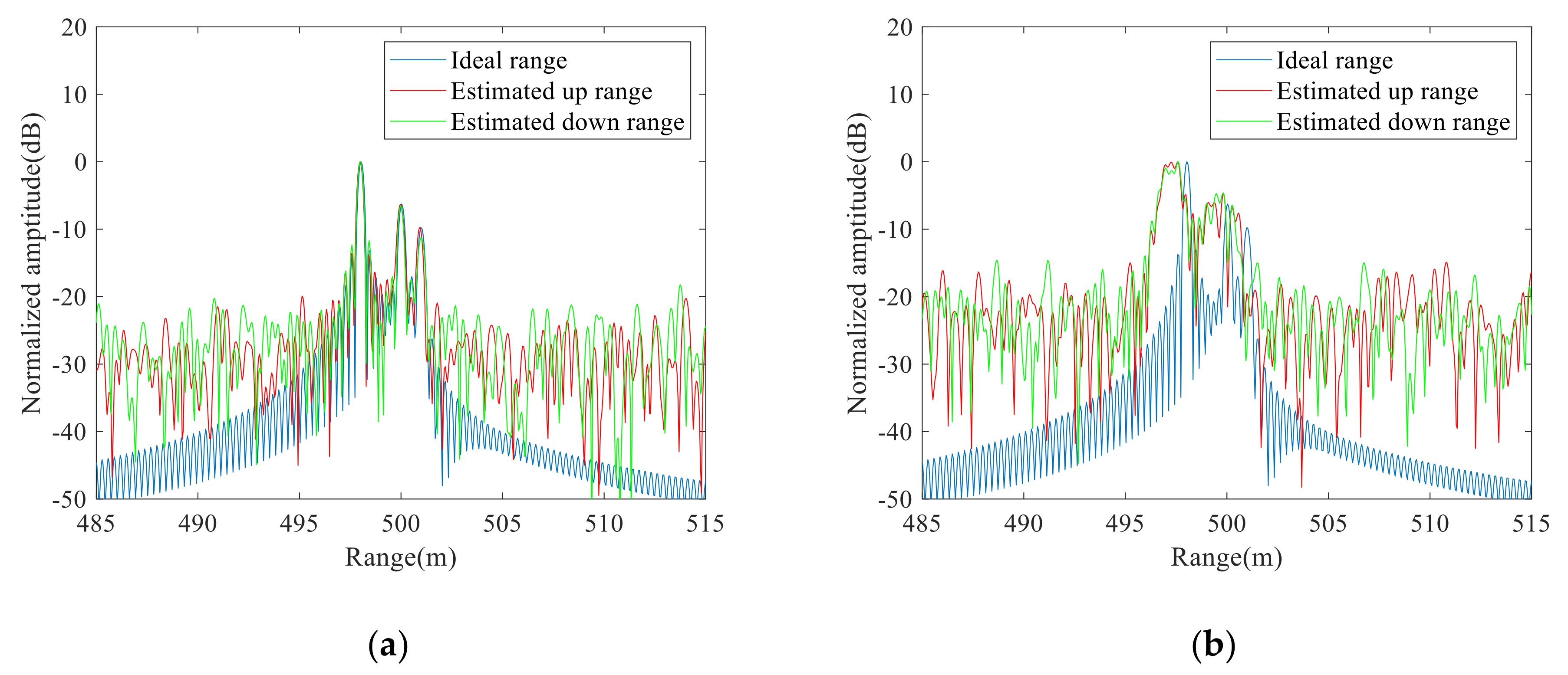
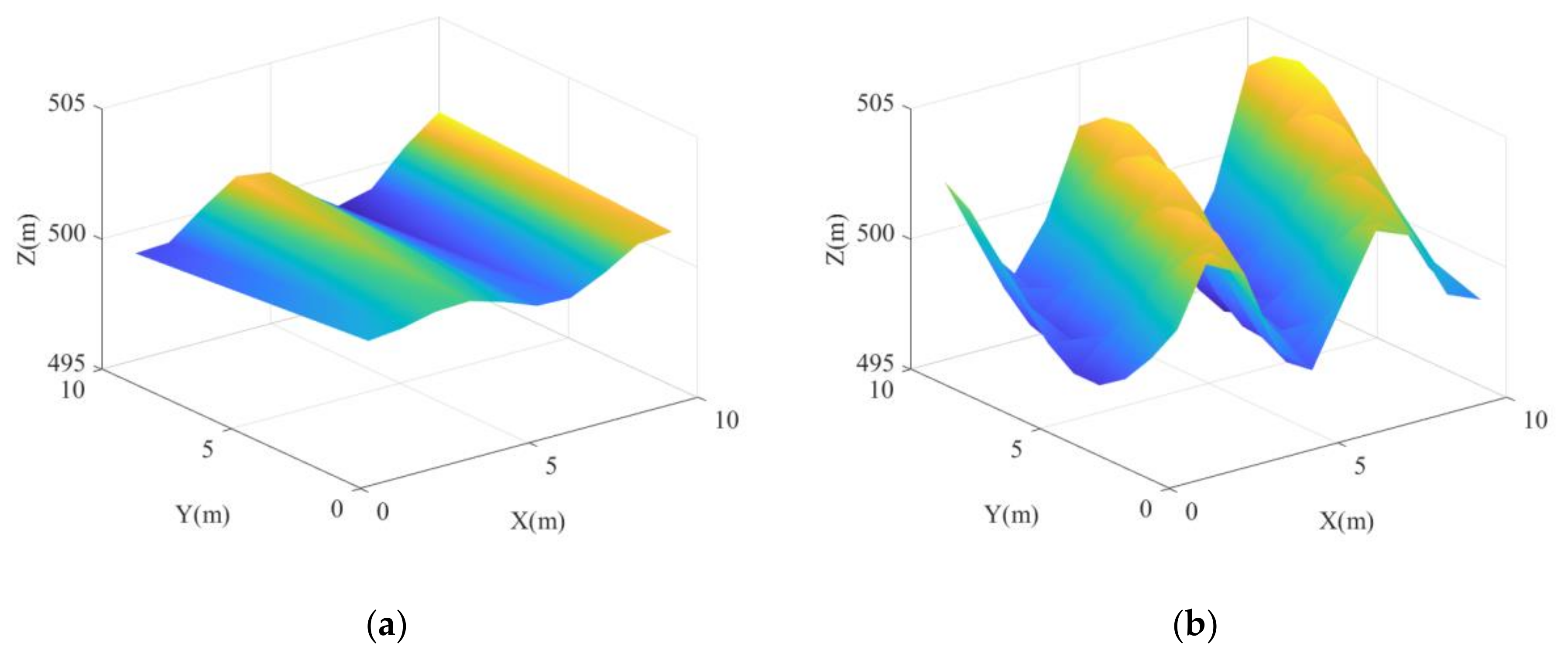
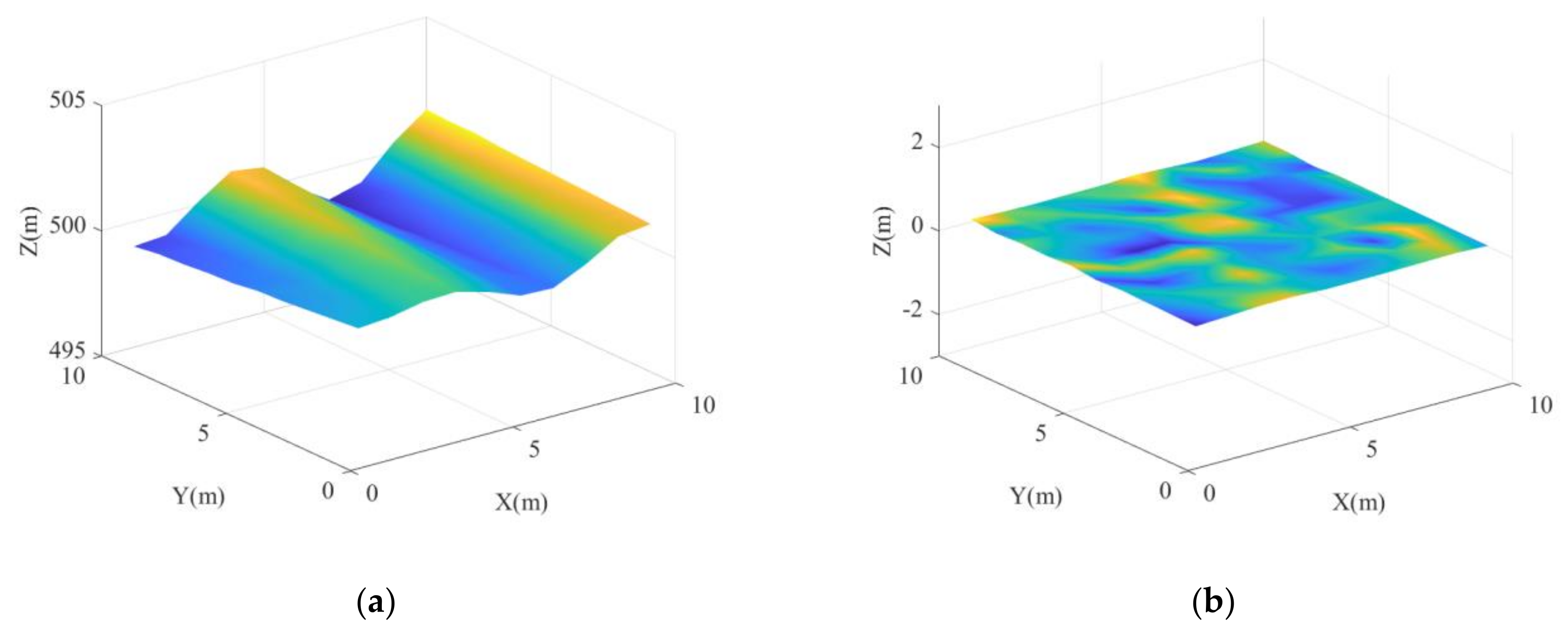
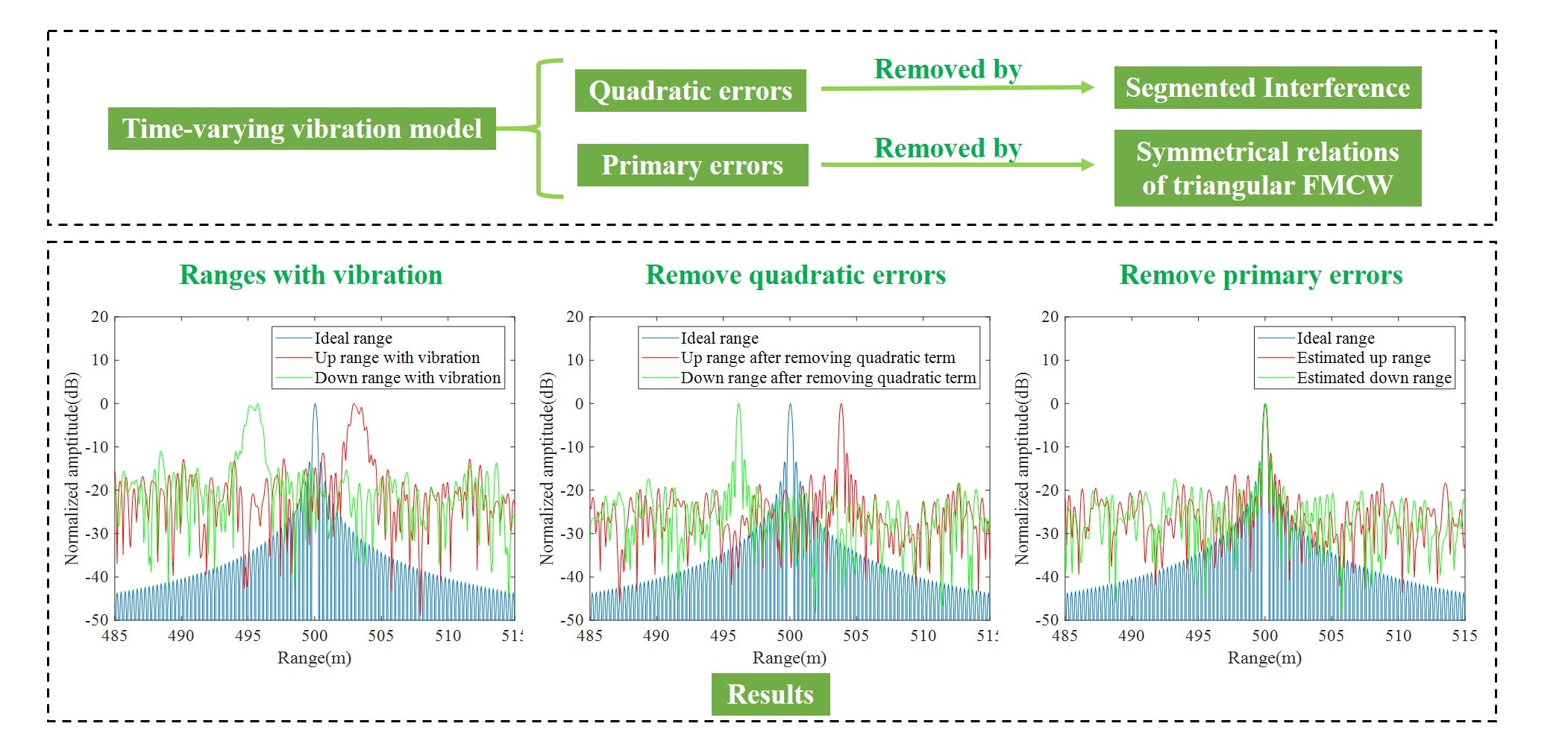
Therefore, the objective of this paper is to compensate for time-varying vibration errors by using only one-period signals without adding additional hardware. To achieve this goal, we first give an analysis of the vibration influence on the range measurement of FMCW LiDAR signals and then propose a time-varying vibration compensation method by using segmented interference. In this method, we divide the time-varying vibration errors into primary errors caused by the constant vibration velocity and quadratic errors. The quadratic vibration errors are removed by the segmented interference method, and the primary vibration errors are compensated by establishing symmetrical mathematical relations of one-period triangular FMCW signals. We verify the effectiveness of the proposed method and its superiority over traditional methods by simulation tests of point target and 3D target. Compared with traditional methods, the advantages of the proposed method include: (1) it can compensate for not only the errors with constant vibration velocity but also time-varying vibration errors without changing the system design; (2) it uses only one-period dechirp signals, which meets the requirement of 3D scanning image; (3) it adopts coherent accumulation in the frequency domain, making it robust to noise.
2. Time-varying Vibrations in FMCW LiDAR Signals
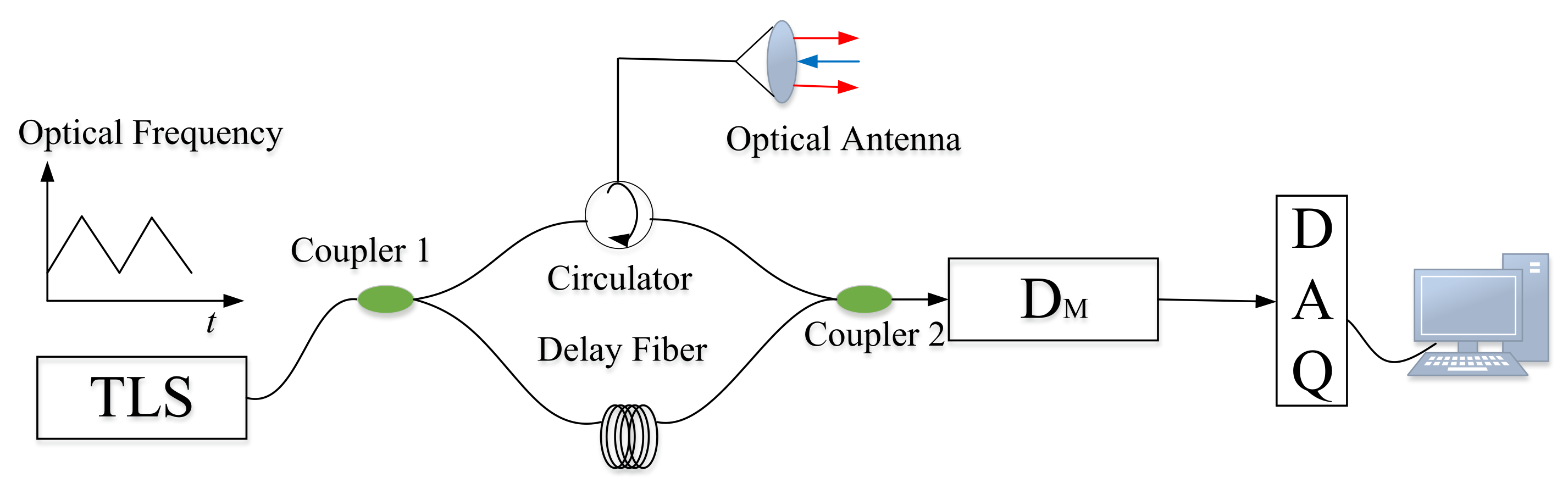
Figure 1 represents the system design of triangular FMCW coherent LiDAR. The waveform of the transmitted signal is triangular FMCW that is generated by a tunable laser, and the transmitted signal is then divided into two signals through coupler 1. One signal separated by coupler 1 serves as a local oscillator signal, and the other signal serves as a transmitted signal that is emitted by an optical antenna. Then, the transmitted signal is reflected when a target is encountered and passes through a circulator. Next, the local oscillator signal separated by coupler 1 travels through a delay fiber, which is then mixed with the echo signal reflected from a target through coupler 2. The mixed signal is coherently detected by detector D
M [
17]. At last, a digital acquisition card DAQ is used to sample the dechirp signals, and the data is sent to the computer for subsequent signal processing [
18,
19]. The coherently detected signals are called dechirp signals in the following part.
The up observation of a triangular FMCW period is taken as an example to derive the influence of time-varying vibration errors on ranging. The ideal transmitted signal is a linear frequency modulation signal, which can be expressed as:
where
is the transmitted signal;
is the envelope of the transmitted signal;
is the initial frequency of the tunable laser, and
is the frequency modulation rate.
The echo signal reflected by a target at range
can be expressed as:
where
is the received signal at range
;
is the velocity of laser, and
is the delay time of the echo signal.
Then, we coherently interfere with the transmitted signal and the echo signal and obtain the dechirp signal that is represented as:
where
is the dechirp signal; * is the conjugate process, and the envelope
will be ignored in the following part. The term
of the above equation represents the residual video phase (RVP) introduced by the dechirp process, which can be removed by using an RVP filter in the frequency domain. The RVP filter is expressed as:
After removing RVP from Equation (3) by using the RVP filter, the dechirp signal shown in Equation (3) is now simplified as:
By applying Fourier transform to the above equation, we can obtain the frequency spectrum:
where
represents the signal period. The frequency spectrum is converted into the range of target:
where
is the theoretical dechirp frequency at range
without vibrations.
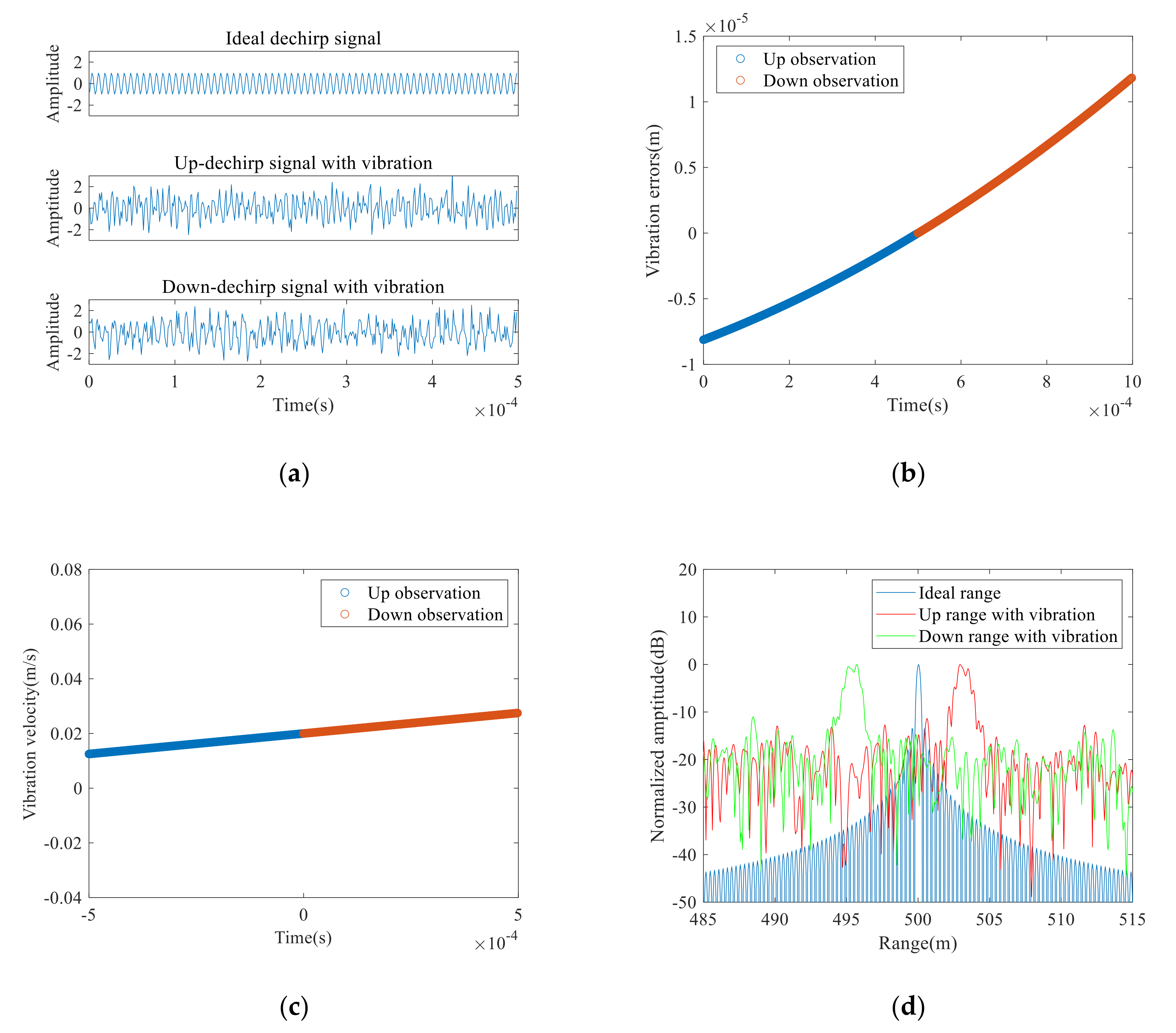
The above equations are correct when the relative range between the LiDAR platform and the target is constant. For a vibrating LiDAR platform, the range of target can be expressed as second-order Taylor expansion [
13,
14]:
where
is the time-varying range in a vibrated environment,
and
is the initial velocity and acceleration of vibration, respectively. We should note that the sine function is more realistic to describe the vibration of the lidar platform in the whole observation process if the vibration is particularly regular. In this case, the local sinusoidal vibration can be approximated as a polynomial form when the vibration period is much larger than the signal period. According to References [
13,
14], the vibration in a one-period signal can be expressed as the quadratic function. Thus, we use the quadratic function to approximate the vibration in a one-period signal. Then, the dechirp signals containing time-varying vibration errors can be expressed as [
20]:
In the above equation, the maximum range error
introduced by cubic term within a period can be approximated to:
where
is the dechirp frequency introduced by cubic term in Equation (9). As
is on the order of microseconds or milliseconds, the range error introduced by cubic term can be ignored. Thus, the dechirp signal containing vibration errors can be simplified as:
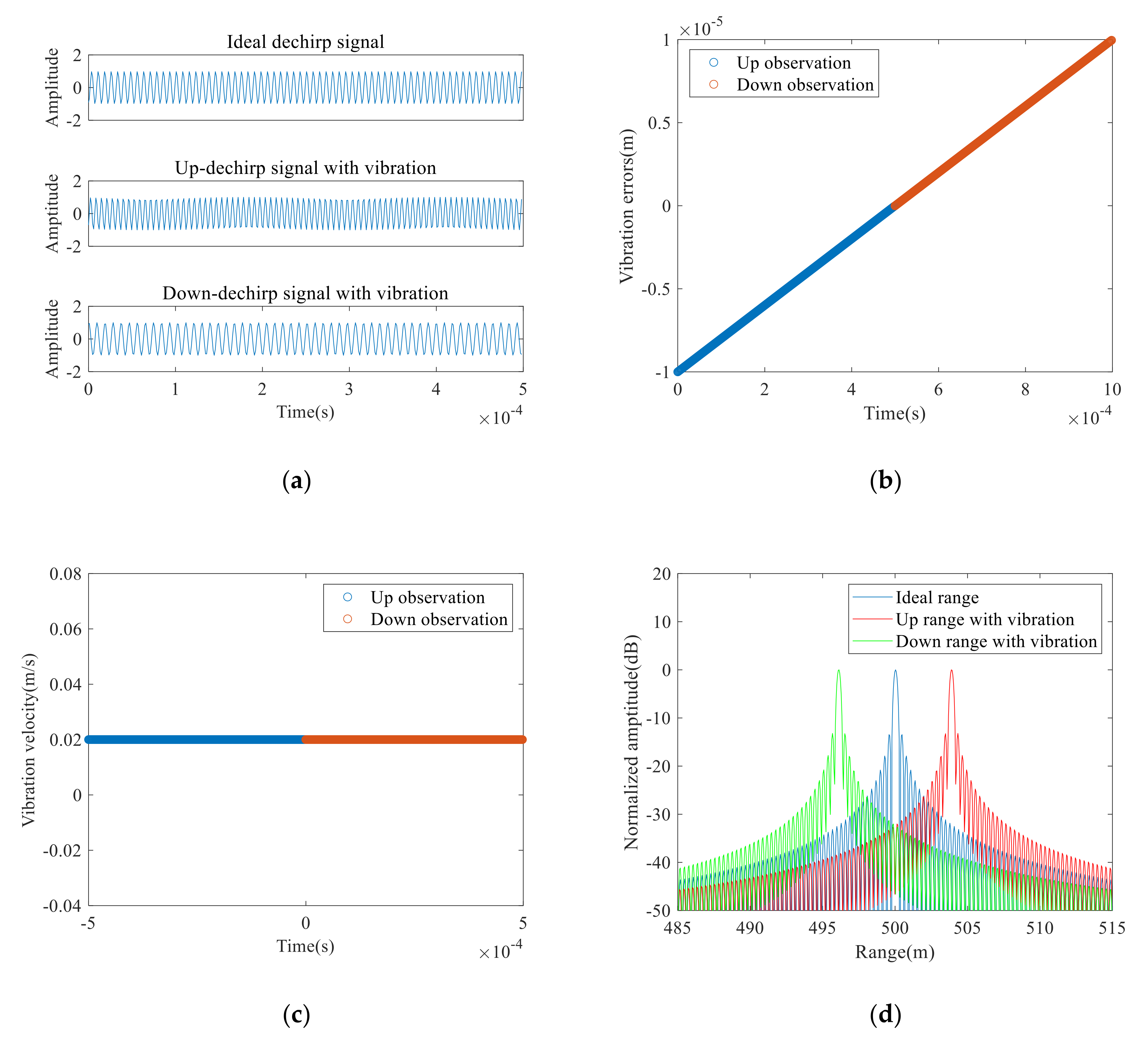
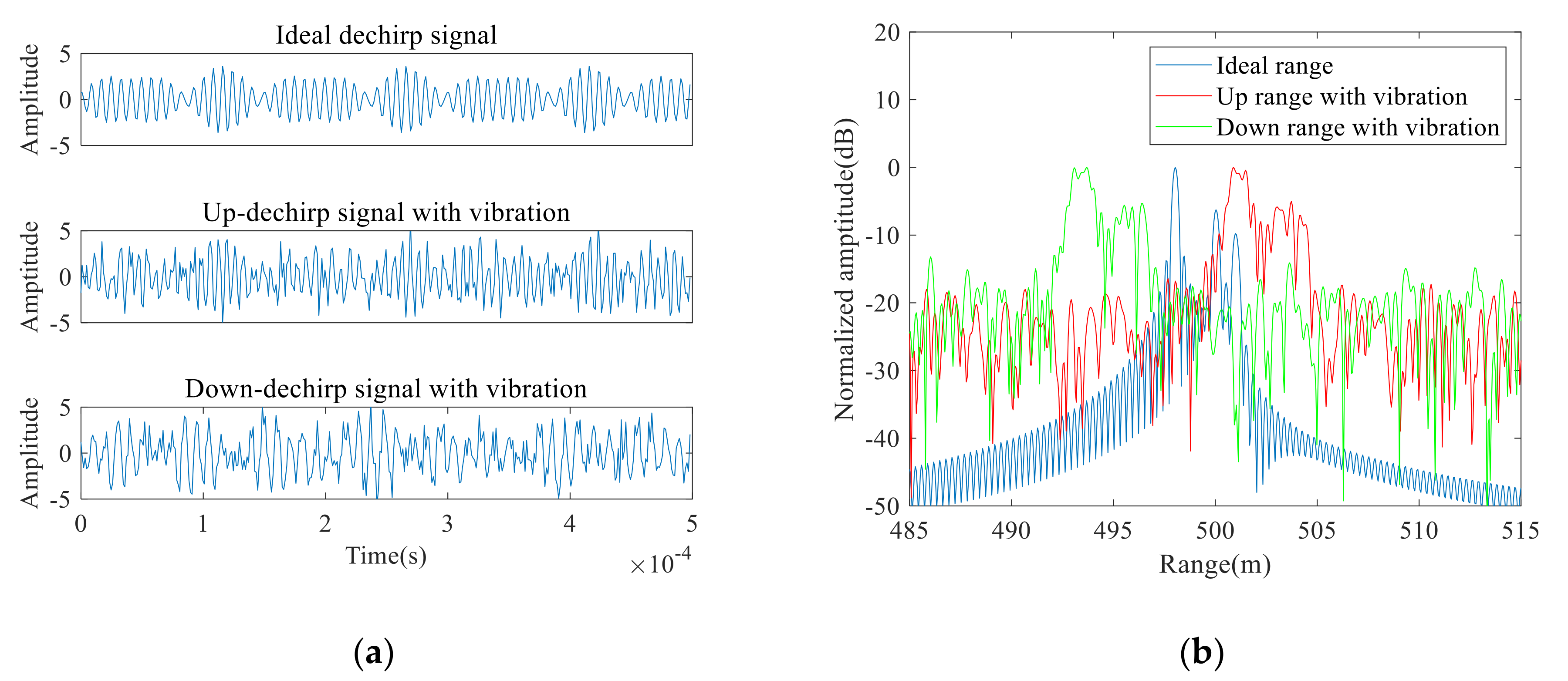
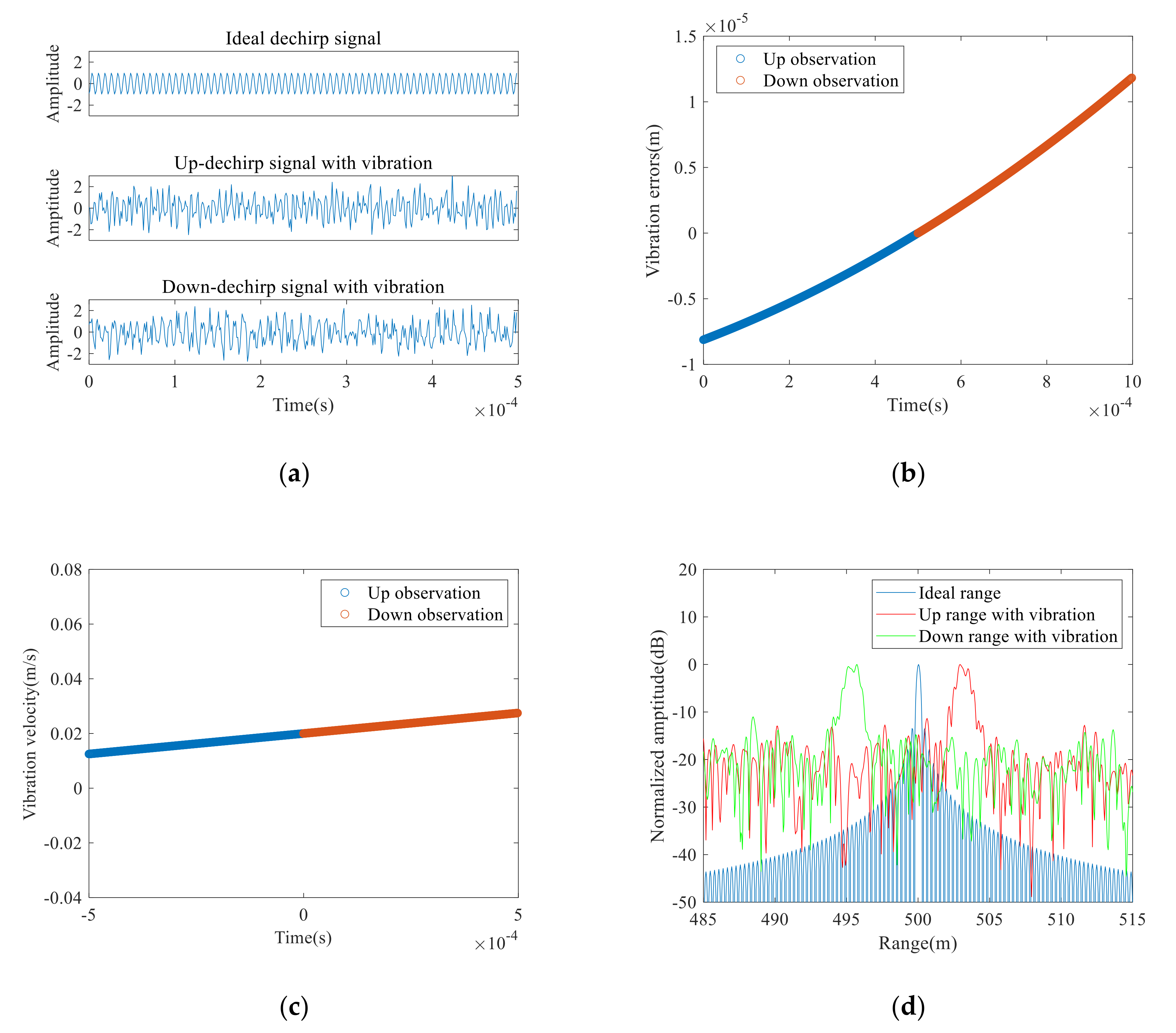
The dechirp signal with vibration errors in the above equation can be regarded as a signal with linear frequency modulation, whose initial frequency is the primary coefficient and the modulation frequency rate is which is twice the quadratic coefficient. In the following part, and are denoted as the quadratic vibration error and the primary vibration error, respectively. The vibration displacement is usually magnified thousands of times because the laser wavelength is short, and the primary vibration errors will cause a great deviation of the ranging results. In addition, the quadratic vibration errors and noise will cause spectrum broadening. In the case of high SNR, the quadratic vibration errors are mainly responsible for the main lobe broadening. The scattering point of a target range will spread to the adjacent range gate, making the one-dimensional range distributions blurred. Therefore, the existence of time-varying vibration errors defocuses the imaging result and yields a large error to the ranging result, and it is necessary to reduce the effect of time-varying vibrations to improve ranging performance.
3. Time-varying Vibration Compensation Based on Segmented Interference
Triangular FMCW is used as the transmitted signal, and the up dechirp signal and down dechirp signal are obtained by coherent detection. Then the dechirp signals containing time-varying vibration errors are respectively expressed as:
where
and
represent the up and down dechirp signals in a triangular frequency modulation period, respectively;
and
are the center time of up and down observations in one-period FMCW signal, respectively. The above equation can be abbreviated as follows:
where
,
, and
are the constant term, the primary coefficient and the quadratic coefficient in the phase of
, respectively;
,
and
are the constant term, the primary coefficient and the quadratic coefficient in the phase of
, respectively. Then, we will introduce the quadratic vibration error and primary vibration error compensation methods, respectively.
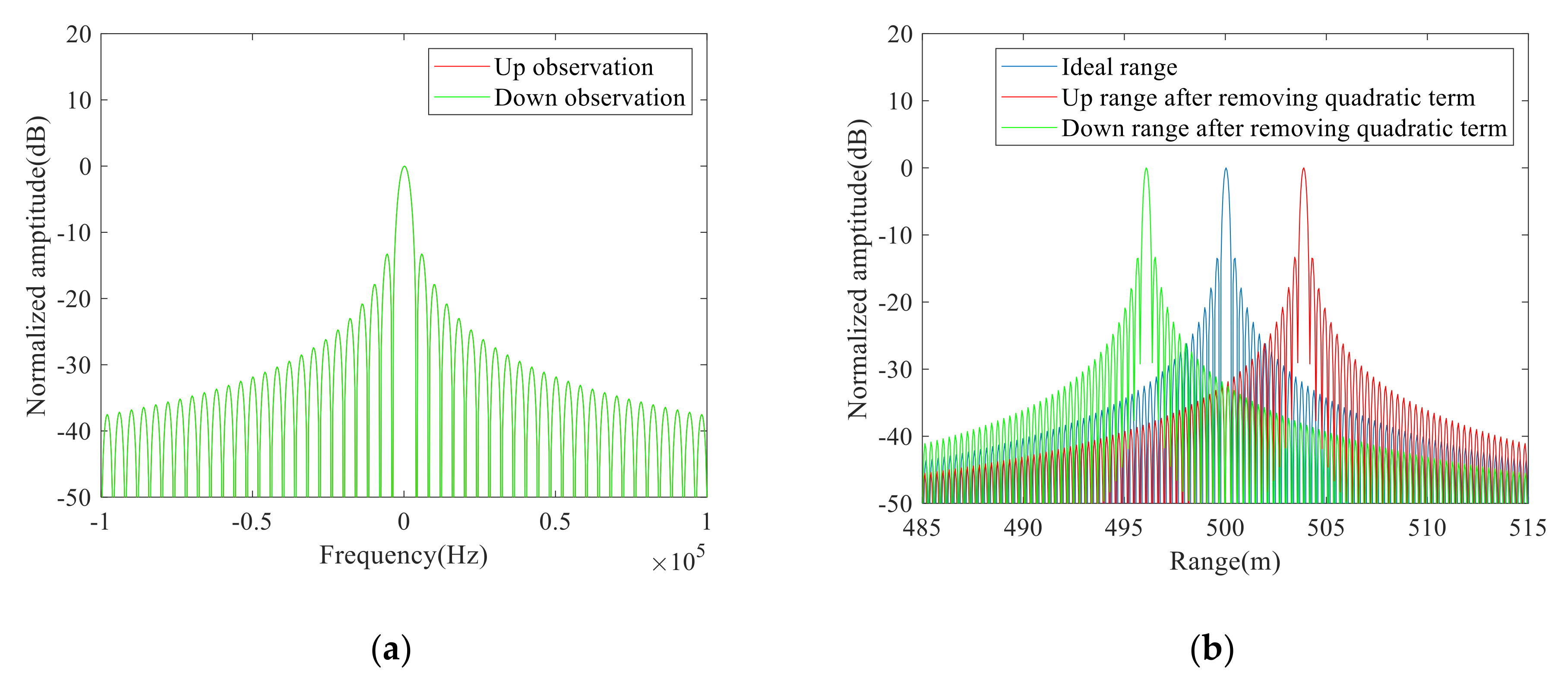
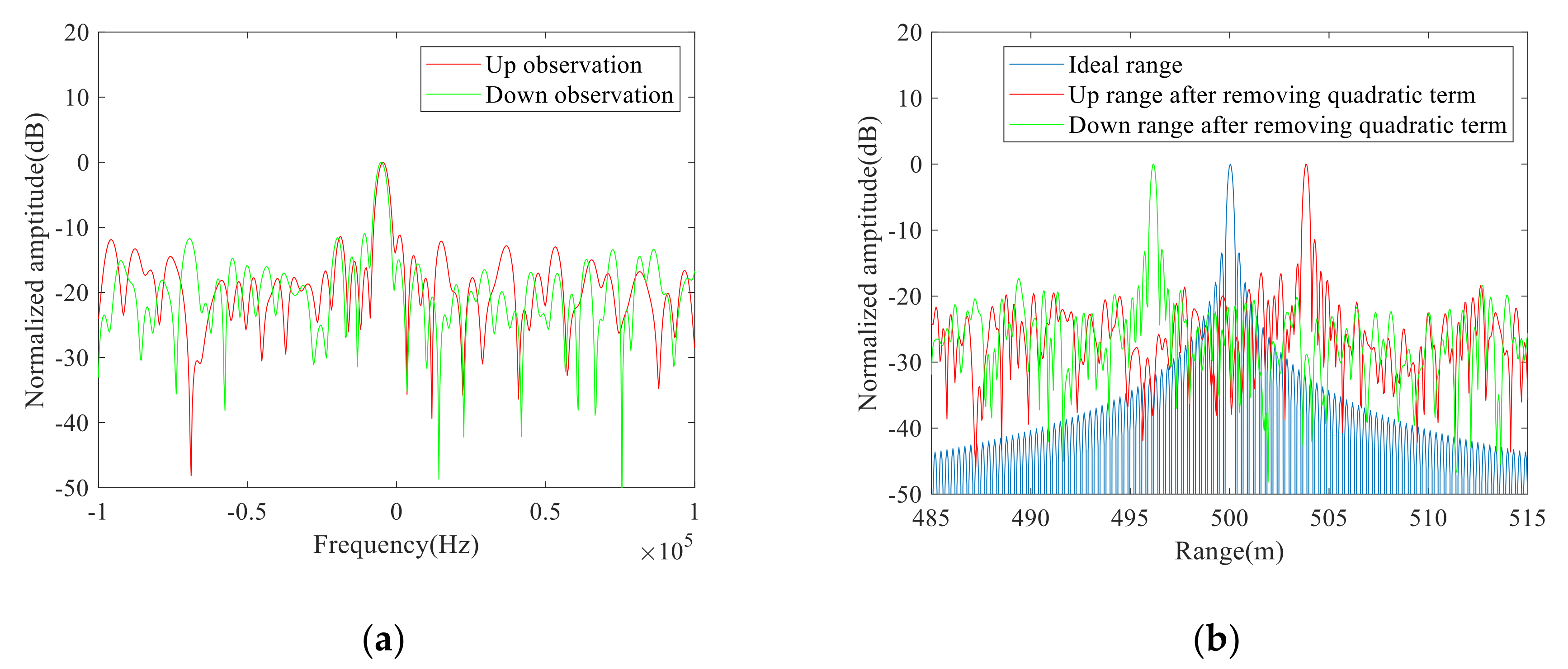
3.1. Compensate for the Quadratic Vibration Errors
In this section, a segmented interference method is used to compensate for the quadratic vibration errors of the dechirp signals. The up and down dechirp signals in Equation (13) are first derived into two segmented dechirp signals by half and half, and the segments are not overlapping. The up segmented dechirp signals and the down segmented dechirp signals can be denoted as:
where
and
are segmented signals of up dechirp signal with a center time of
and
, respectively;
and
are segmented signals of down dechirp signal with a center time of
and
, respectively. Then, the up interference signal is obtained by interfering
and
, and the down interference signal is obtained by interfering
and
. The interference signals are shown as:
where
and
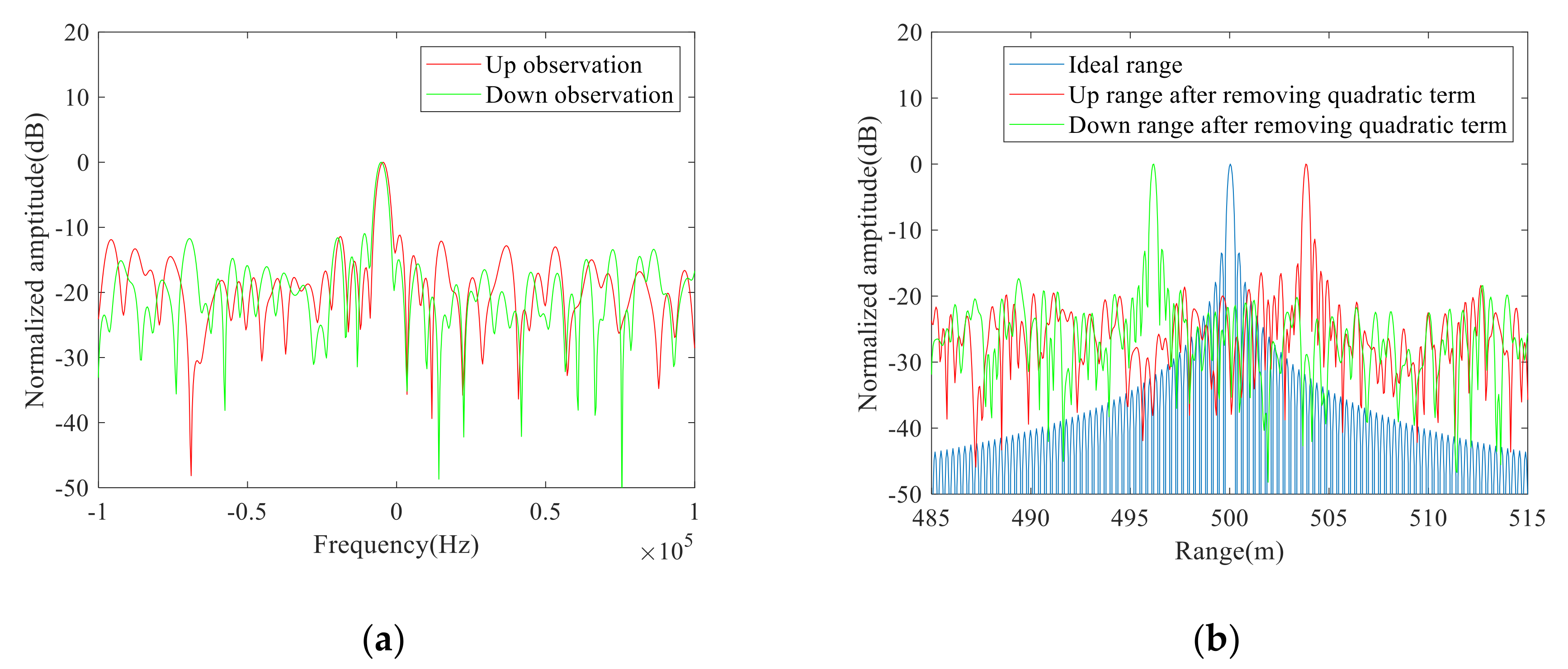
are the up and down interference signals, respectively. The interference signals in Equation (15) are single-frequency signals. Then, we apply Fourier transform to the interference signals, and the frequencies of up and down interference signals can be expressed as:
where
and
are the interference frequencies of up and down interference signals, respectively. The quadratic coefficients of up and down dechirp signals can be obtained:
where
and
are the estimated quadratic coefficient, respectively. The quadratic vibration compensation filters can be designed by using the estimated coefficients, which are shown as:
where
and
are the quadratic vibration compensation filters of up and down observations, respectively. Then,
and
are used to remove the quadratic vibration errors shown in Equation (12). The dechirp signals after removing quadratic vibration errors are shown as:
where
and
are the up and down dechirp signals after compensating for the quadratic vibration errors, respectively.
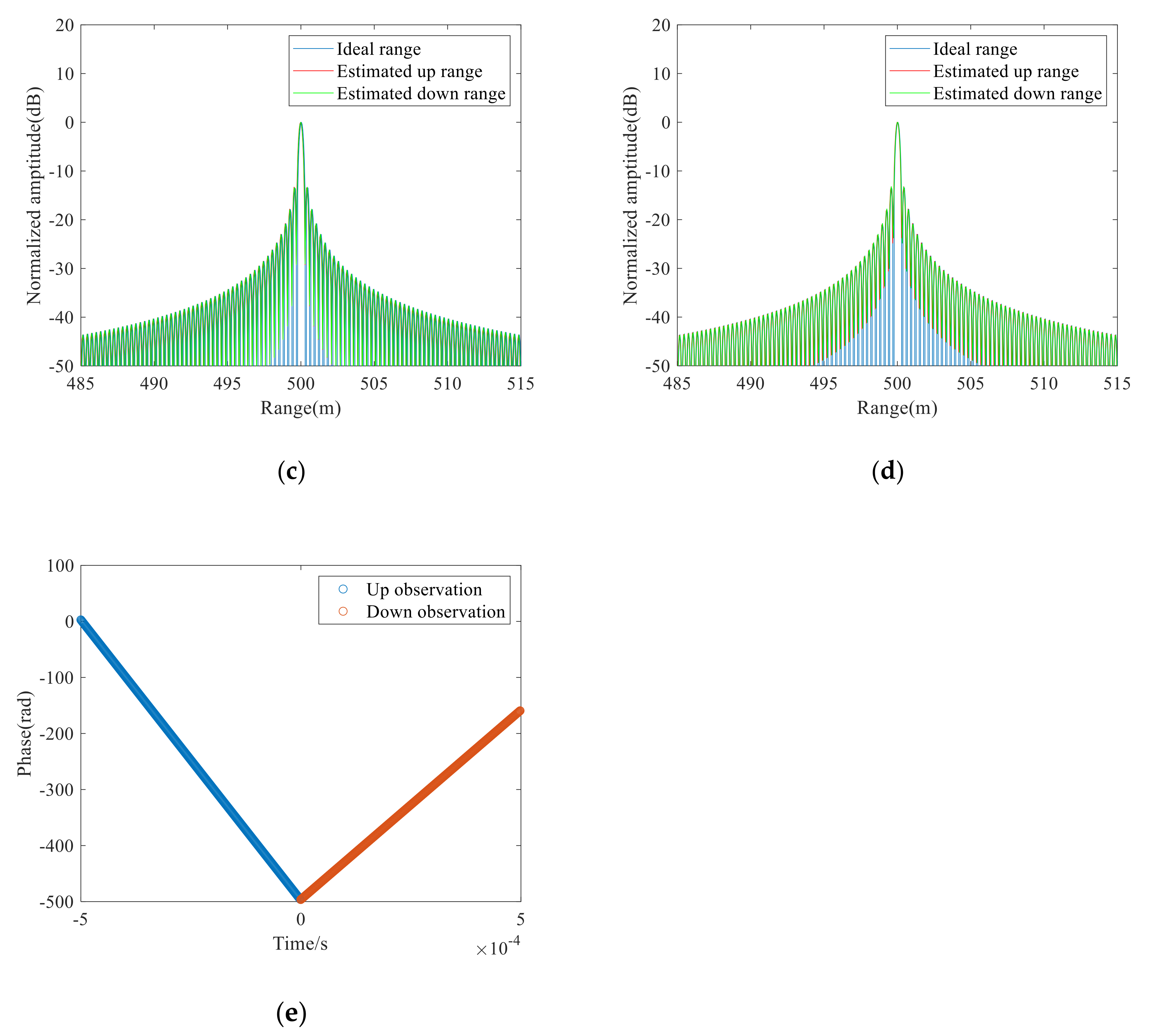
3.2. Compensate for the Primary Vibration Errors
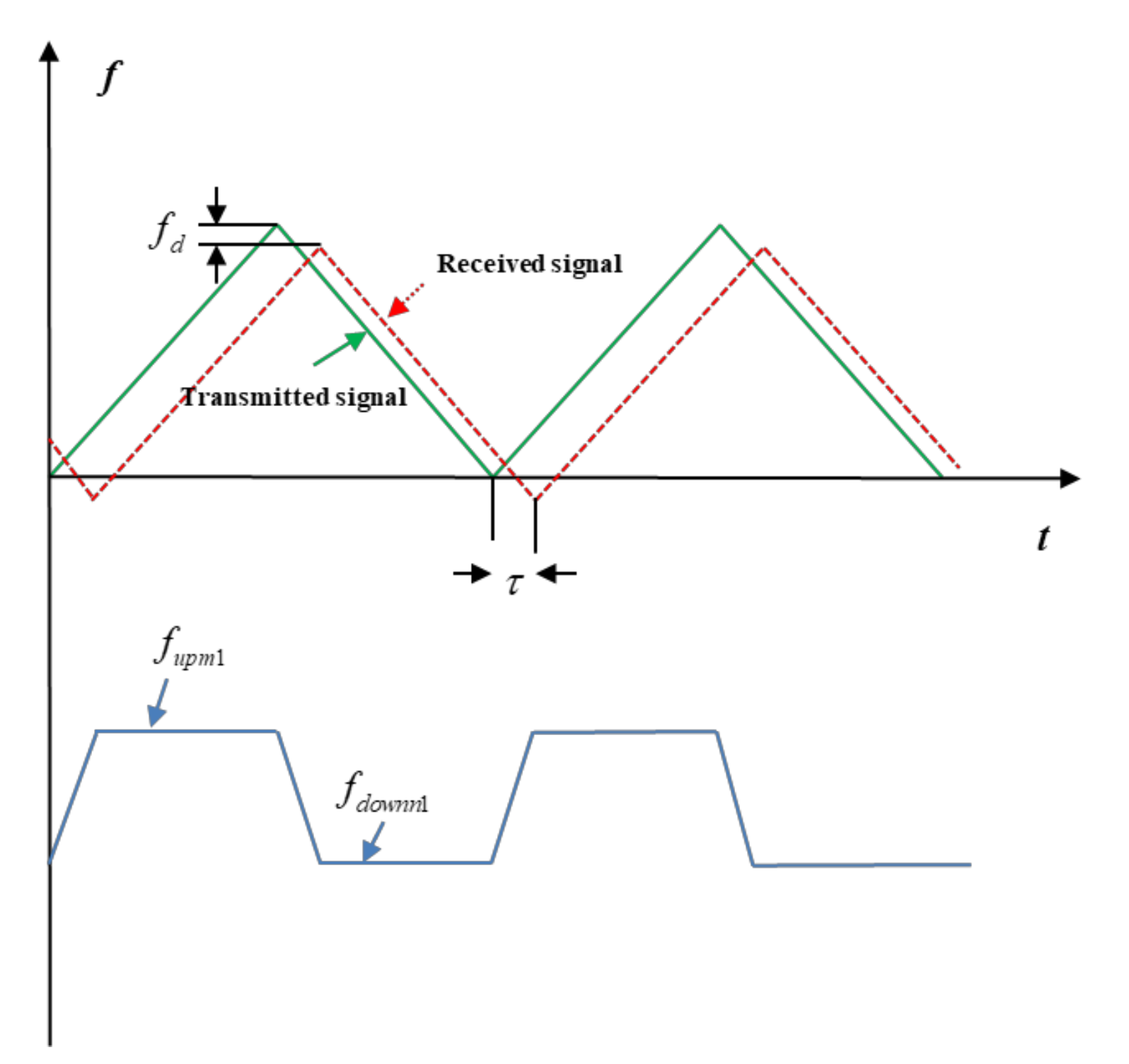
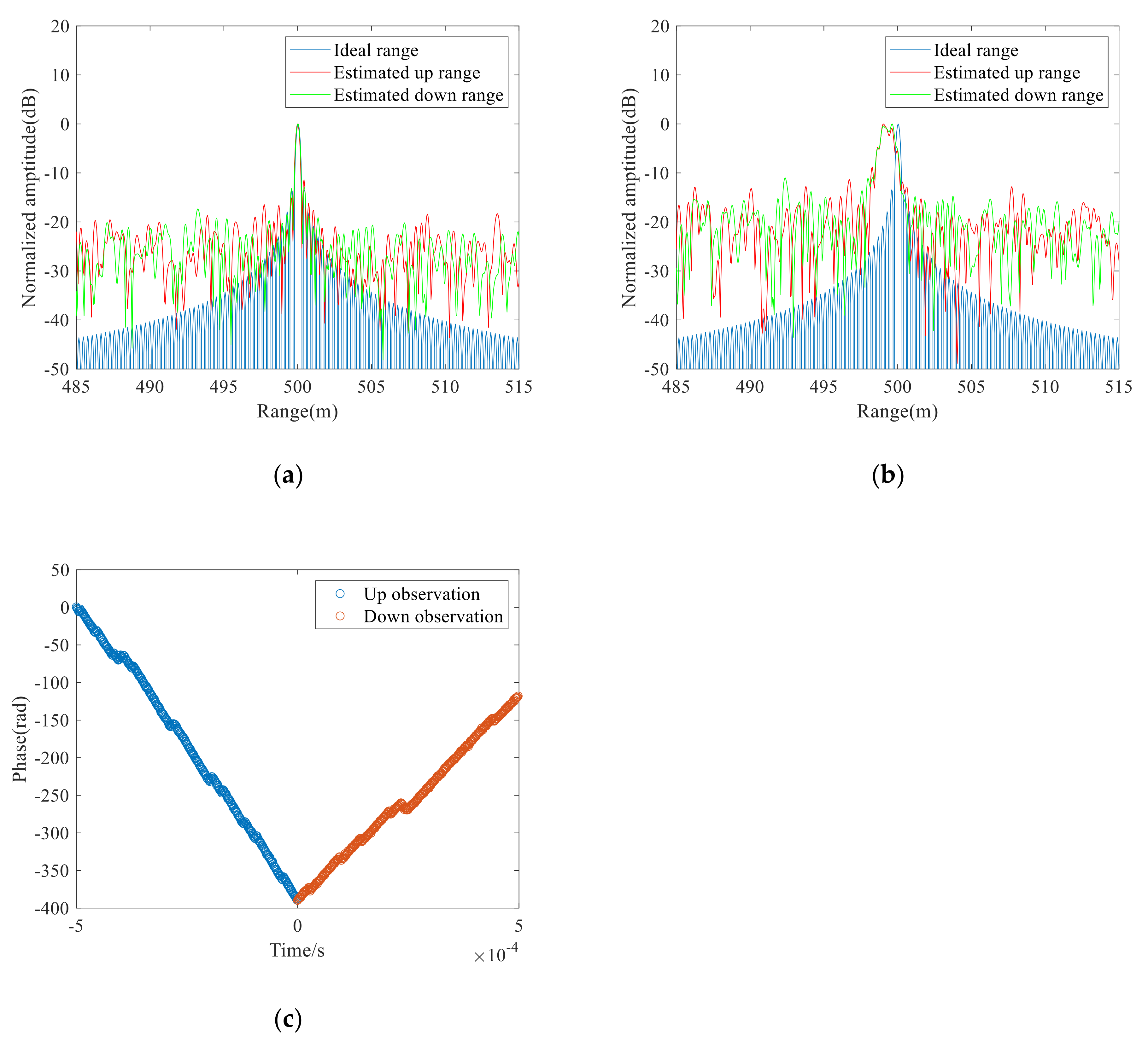
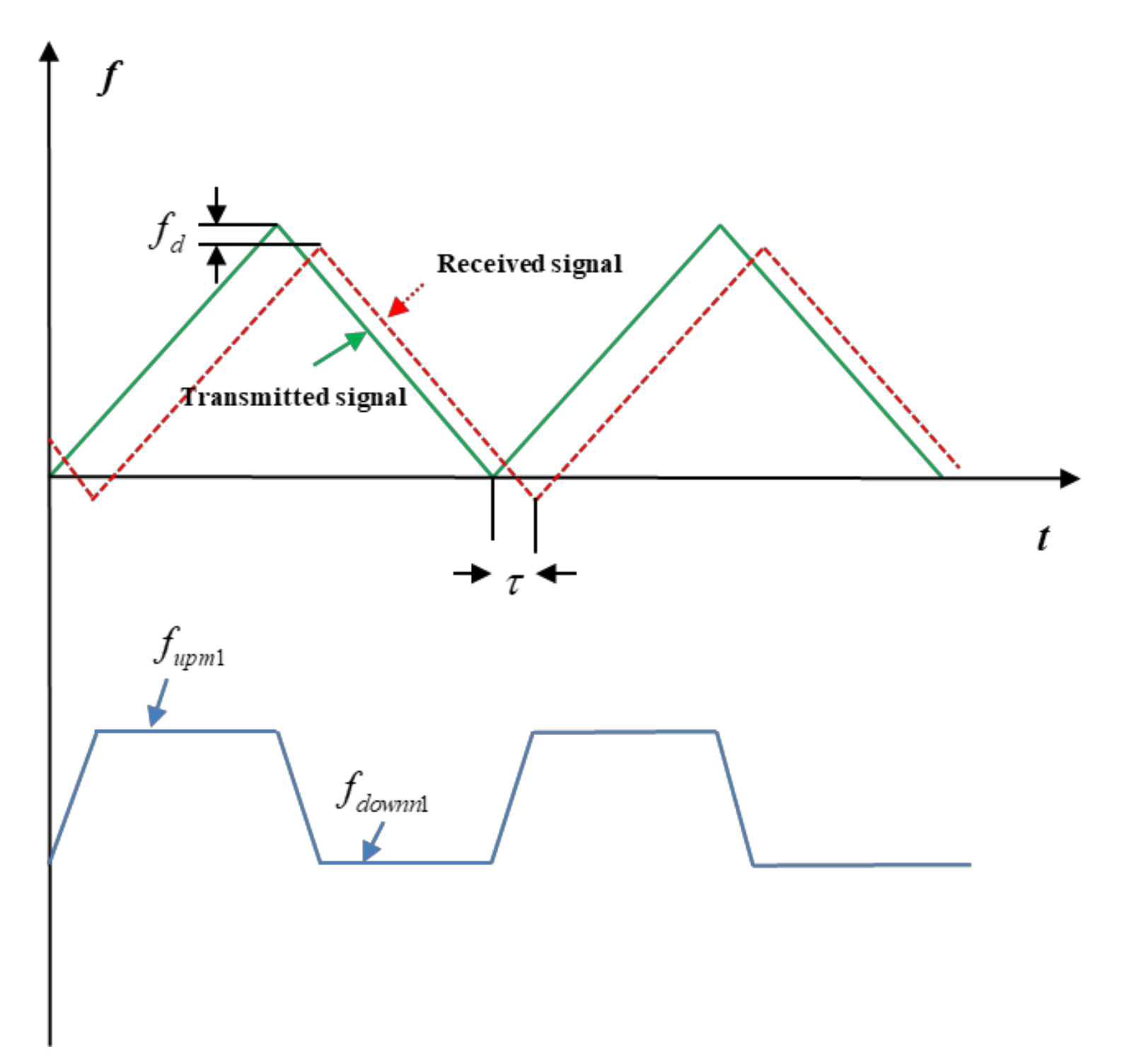
Figure 2 shows the schematic diagram of triangular FMCW ranging with primary vibration errors. The green line represents the ideal transmitted frequency, and the red dashed line represents the received echo that contains primary vibration errors. Then, we use blue solid lines to denote the dechirp frequency containing primary vibration errors and
represent the Doppler frequency introduced by primary vibration errors. The Doppler frequency in the up and down dechirp signals can be estimated by using the symmetrical relations of the spectrums of the up and down dechirp signals. Then the primary vibration errors can be calculated by using the estimated Doppler frequency.
In Equation (19), the dechirp signals after removing the quadratic vibration errors are single-frequency signals, and there is no obvious spectrum spread in the one-dimensional range distributions, making the spectrum peak clearly discernable. Therefore, Fourier transform is performed on the up and down dechirp signals in Equation (19), and the frequencies corresponding to the spectrum peaks are the dechirp frequencies containing only primary vibration errors. The dechirp frequencies of the up and down dechirp signals can be respectively expressed as:
where
is the dechirp frequency corresponding to the ideal range of the target, and
is the Doppler frequency introduced by the primary vibration errors. According to the principle of Doppler effect, the relationship between Doppler frequency and velocity can be expressed as:
The initial vibration velocity can be estimated by using Equations (20) and (21):
where
is the estimated initial velocity. The estimated initial velocity is then used to design the primary vibration compensation filters that can be expressed as:
The above filters are used to compensate for the primary vibration errors of the dechirp signals. Then, the up and down dechirp signals after compensating for primary vibration errors can be respectively expressed as:
At last, Fourier transform is applied to Equation (24) to estimate the actual range of target after removing the vibration errors.
3.3. Process Flow of the Proposed Vibration Compensation method
This section introduces the process flow of the proposed time-varying vibration compensation method by using segmented interference. First, the dechirp signal of one triangular FMCW period is divided into up and down dechirp signals which are then divided into two segmented dechirp signals, respectively. Second, the quadratic vibration coefficients are estimated by segmented interference of the segmented dechirp signals, and then quadratic compensation filters are established to remove the quadratic vibrations from the original dechirp signals. Finally, the primary vibration errors are estimated by using the symmetrical mathematical relations of the dechirp signals in one triangular FMCW period, and the primary compensation filters are designed to remove the primary vibrations introduced by constant vibration velocity. The process flow of the proposed time-varying vibration compensation method by using segmented interference is shown in
Table 1.
In
Table 1, the symbol
j is used to denote the directions of frequency sweep, namely, the dechirp signals and the dechirp frequencies of up and down observations in a triangular FMCW period. To be specific,
j = 1 represents the corresponding data of up observation and
j = 2 represents the corresponding data of down observation.
5. Discussion
Studies [
10,
11,
12] used multiple lasers or additional hardware devices to compensate for vibration errors and thereby achieve accurate ranging results. However, multiple lasers may introduce asynchronous problems and increase costs. Compared with [
10,
11,
12], the proposed method does not need additional lasers and avoids the asynchronous problem between multiple lasers, which reduces the hardware configuration. Tao et al. [
13,
14] needed long-time observed data to eliminate the vibrations. However, a 3D imaging system uses a laser scanner to dynamically measure the range of the target, and the observation time of one laser spot is short, which does not meet the requirements of the above methods. To solve the above problems, the dechirp signal of one triangular FMCW period is firstly divided into up and down dechirp signals, and then the up and down dechirp signals are divided into segmented dechirp signals, respectively. Compared with [
13,
14], the proposed method only needs one-period signals to compensate for the time-varying vibration errors, which is suitable for 3D imaging.
The three-point method [
15] selects three phase points from one-period signals to establish mathematical relations and thereby remove the errors introduced by constant vibration velocity, but the jitters introduced by random noise will affect the phase unwrapping and the ranging accuracy. However, the proposed method adopts coherent accumulation in the frequency domain, which can effectively eliminate the influence of noise on ranging. The Doppler frequency shift method [
16] can use one-period signals to estimate and thereby eliminate the relative frequency shift, which achieves excellent results under the condition of constant vibration velocity. However, the vibration velocity is time-varying, which degrades the accuracy of range measurements of this method. To solve the above problems, the segmented interference is first used in the proposed method to estimate and eliminate the quadratic vibrations, following which the symmetrical mathematical relations of up and down signals are used to remove the primary vibrations. Therefore, the time-varying vibration errors can be effectively compensated by the proposed method.
When we establish the time-varying vibration model, the range of the target is approximated by a second-order Taylor expansion, which is suitable for the scene with slowly varying vibration. To be specific, we divide the time-varying vibration errors into primary errors caused by the vibration with constant velocity and quadratic errors. However, vibration with severely time-varying acceleration can lead to not only primary and quadratic errors but also higher-order errors; therefore, the proposed method may not perform well because the approximation accuracy of the quadratic function to higher-order errors is limited. For severe vibrations, we will consider the higher-order approximation in our future research.
Synthetic aperture LiDAR (SAL) and inverse synthetic aperture LiDAR (ISAL) have attracted much attention in recent years due to their ability to achieve high-resolution imaging and accurate target recognition. However, vibration has also become a tricky issue in SAL and ISAL applications. Therefore, the application of the proposed method in SAL and ISAL is our future research direction.



 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}