Computer Vision and Deep Learning Techniques for the Analysis of Drone-Acquired Forest Images, a Transfer Learning Study

 , , and
, , and
Abstract
1. Introduction
1.1. State of the Art
- Develop an algorithm (that uses a ResNet50) to classify patches corresponding to tree species (Multi-Label Patch (MLP) algorithm). Assess (a) Quality of the results obtained with the amount of data available (2800 images), and (b) Degree of improvement achieved by Transfer Learning.
- Develop a semantic segmentation algorithm for tree species that is precise (DICE coefficient) and efficient (computation time), using three separate algorithmic approaches and two DL networks.
- Evaluate the applicability of the MLP algorithm to another practical problem: Detection of an invasive tree species in a coastal forest.
2. Methodology
2.1. Data Acquisition
2.1.1. Location 1: Yamagata University Research Forest
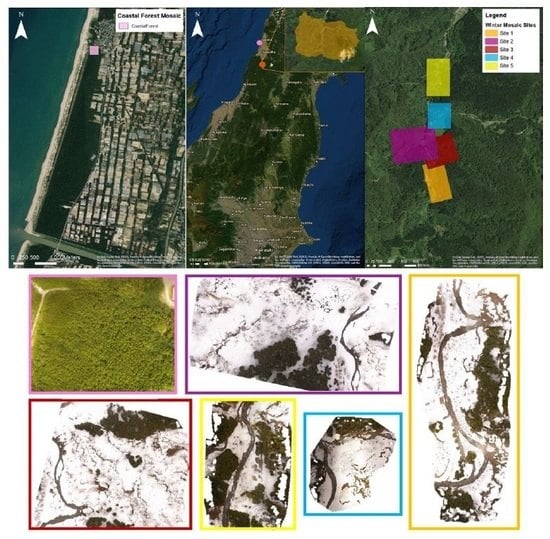
2.1.2. Location 2: Shonai Coastal Forest
2.2. Data Processing and Annotation
2.3. Problem Formalization
2.4. Multi-Label Patch Classification Using ResNet
2.4.1. Segmentation Refinement Using watersheds
2.5. Forest Mosaic Segmentation Using UNet
2.6. Evaluation Criteria
3. Results
3.1. Experiment 1: Transfer Learning and Multi-Label Patch Classification
- Random: In order to test whether Transfer Learning was necessary, we included a model initialised with random weights. Only results of the unfrozen random model were presented as the frozen random model had poor results.
- RN50F, RN50UNF: We also considered a ResNet50 with preloaded ImageNet [16] weights. The inclusion of this model allowed us to study whether or not a general-purpose classification model could be fit to solve our problem using a relatively low number of images. This model was re-trained frozen (RN50F) and unfrozen (RN50UNF).
- RN50 + PLANET-UNFF, RN50 + PLANET-UNFUNF, RN50 + PLANET-FF, RN50 + PLANET-FUNF: We also considered the ResNet model again and re-trained it using the PLANET dataset of satellite images of the Amazon rainforest [17]. In order to assess whether better results could be obtained when training from a problem (classification of satellite images of tropical vegetation) being more similar to our data. The ResNet model was considered frozen and unfrozen as before, RN50 + PLANET-F, RN50 + PLANET-UNF. These two models were subsequently retrained with our images each considered frozen and unfrozen producing 4 models: RN50 + PLANET-UNFF, RN50 + PLANET-UNFUNF, RN50 + PLANET-FF, RN50 + PLANET-FUNF.
3.2. Experiment 2: Semantic Segmentation
3.3. Experiment 3: Detection of Invasive Tree Species in the Coastal Forest
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, I.C.; Hill, J.K.; Ohlemüller, R.; Roy, D.B.; Thomas, C.D. Rapid Range Shifts of Species Associated with High Levels of Climate Warming. Science 2011, 333, 1024–1026. [Google Scholar] [CrossRef] [PubMed]
- Esquivel-Muelbert, A.; Baker, T.R.; Dexter, K.G.E.A. Compositional response of Amazon forests to climate change. Glob. Chang. Biol. 2019, 25, 39–56. [Google Scholar] [CrossRef] [PubMed]
- Kherchouche, D.; Slimani, S.; Touchan, R.; Touati, D.; Malki, H.; Baisan, C.H. Fire human-climate interaction in Atlas cedar forests of Aurès, Northern Algeria. Dendrochronologia 2019, 55, 125–134. [Google Scholar] [CrossRef]
- Coll, L.; Ameztegui, A.; Collet, C.; Löf, M.; Mason, B.; Pach, M.; Verheyen, K.; Abrudan, I.; Barbati, A.; Barreiro, S.; et al. Knowledge gaps about mixed forests: What do European forest managers want to know and what answers can science provide? For. Ecol. Manag. 2018, 407, 106–115. [Google Scholar] [CrossRef]
- Anderegg, W.R.L.; Anderegg, L.D.L.; Kerr, K.L.; Trugman, A.T. Widespread drought-induced tree mortality at dry range edges indicates that climate stress exceeds species’ compensating mechanisms. Glob. Chang. Biol. 2019, 25, 3793–3802. [Google Scholar] [CrossRef]
- Shimada, T. State of Japan’s Forests and Forest Management―2nd Country Report of Japan to the Montreal Process; Forestry Agency: Tokyo, Japan, 2009. [Google Scholar]
- Lopez C, M.L.; Mizota, C.; Nobori, Y.; Sasaki, T.; Yamanaka, T. Temporal changes in nitrogen acquisition of Japanese black pine (Pinus thunbergii) associated with black locust (Robinia pseudoacacia). J. For. Res. 2014, 25, 585–589. [Google Scholar] [CrossRef]
- Grotti, M.; Chianucci, F.; Puletti, N.; Fardusi, M.J.; Castaldi, C.; Corona, P. Spatio-temporal variability in structure and diversity in a semi-natural mixed oak-hornbeam floodplain forest. Ecol. Indic. 2019, 104, 576–587. [Google Scholar] [CrossRef]
- Frayer, W.E.; Furnival, G.M. Forest Survey Sampling Designs: A History. J. For. 1999, 97, 4–10. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Automatic classification of trees using a UAV onboard camera and deep learning. arXiv 2018, arXiv:abs/1804.10390. [Google Scholar]
- Natesan, S.; Armenakis, C.; Vepakomma, U. Resnet-Based Tree Species Classification Using UAV Images. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 475–481. [Google Scholar] [CrossRef]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of Fir Trees (Abies sibirica) Damaged by the Bark Beetle in Unmanned Aerial Vehicle Images with Deep Learning. Remote. Sens. 2019, 11, 643. [Google Scholar] [CrossRef]
- Fromm, M.; Schubert, M.; Castilla, G.; Linke, J.; McDermid, G. Automated Detection of Conifer Seedlings in Drone Imagery Using Convolutional Neural Networks. Remote. Sens. 2019, 11, 2585. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A Survey on Transfer Learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Diez, Y.; Kentsch, S.; Caceres, M.L.L.; Nguyen, H.T.; Serrano, D.; Roure, F. Comparison of Algorithms for Tree-top Detection in Drone Image Mosaics of Japanese Mixed Forests. In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods, Valletta, Malta, 22–24 February 2020; Volume 1: ICPRAM, INSTICC. SciTePress: Setubal, Portugal, 2020; pp. 75–87. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems 25; Pereira, F., Burges, C.J.C., Bottou, L., Weinberger, K.Q., Eds.; Curran Associates, Inc.: Dutchess County, NY, USA, 2012; pp. 1097–1105. [Google Scholar]
- Planet: Understanding the Amazon from Space. Available online: https://www.kaggle.com/c/planet-understanding-the-amazon-from-space (accessed on 19 August 2019).
- Richardson, D.; Binggeli, P.; Schroth, G. Invasive Agroforestry Trees—Problems and Solutions; Island Press: Washington, DC, USA, 2004; pp. 371–396. [Google Scholar]
- Mubin, N.A.; Nadarajoo, E.; Shafri, H.Z.M.; Hamedianfar, A. Young and mature oil palm tree detection and counting using convolutional neural network deep learning method. Int. J. Remote. Sens. 2019, 40, 7500–7515. [Google Scholar] [CrossRef]
- Lopez, M.L.C.; Nakano, S.; Ferrio, J.P.; Hayashi, M.; Nakatsuka, T.; Sano, M.; Yamanaka, T.; Nobori, Y. Evaluation of the effect of the 2011 Tsunami on coastal forests by means of multiple isotopic analyses of tree-rings. Isot. Environ. Health Stud. 2018, 54, 494–507. [Google Scholar] [CrossRef] [PubMed]
- Agisoft. Agisoft Metashape 1.5.5, Professional Edition. Available online: http://www.agisoft.com/downloads/installer/ (accessed on 19 March 2020).
- Team, T.G. GNU Image Manipulation Program. Available online: http://gimp.org (accessed on 19 March 2020).
- Guo, Y.; Liu, Y.; Georgiou, T.; Lew, M.S. A review of semantic segmentation using deep neural networks. Int. J. Multimed. Inf. Retr. 2018, 7, 87–93. [Google Scholar] [CrossRef]
- Beucher, S.; Meyer, F. The Morphological Approach to Segmentation: The Watershed Transformation; Marcel Dekker Inc.: New York, NY, USA, 1993; Volume 34, pp. 433–481. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:abs/1505.04597. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE Computer Society: Los Alamitos, CA, USA, 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Funke, J.; Tschopp, F.; Grisaitis, W.; Sheridan, A.; Singh, C.; Saalfeld, S.; Turaga, S.C. Large Scale Image Segmentation with Structured Loss Based Deep Learning for Connectome Reconstruction. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 1669–1680. [Google Scholar] [CrossRef] [PubMed]
- Howard, J.; Thomas, R.; Gugger, S. Fastai. Available online: https://github.com/fastai/fastai (accessed on 18 April 2020).
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–125. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Deciduous | wM1 | wM2 | wM3 | wM4 | B | wM6 | wM7 | AVG | AVG Site1 | |
|---|---|---|---|---|---|---|---|---|---|---|
| UNet | ||||||||||
| LR 0.3 | 0.253 | 0.222 | 0.000 | 0.402 | 0.254 | 0.329 | 0.397 | 0.265 | 0.219 | |
| LR 0.04 | 0.607 | 0.171 | 0.372 | 0.537 | 0.494 | 0.275 | 0.308 | 0.395 | 0.468 | |
| LR 0.003 | 0.650 | 0.631 | 0.571 | 0.448 | 0.429 | 0.254 | 0.326 | 0.473 | 0.483 | |
| LR 0.0005 | 0.824 | 0.772 | 0.797 | 0.609 | 0.596 | 0.664 | 0.699 | 0.709 | 0.667 | |
| LR | 0.792 | 0.740 | 0.784 | 0.591 | 0.637 | 0.639 | 0.620 | 0.686 | 0.671 | |
| Resnet | ||||||||||
| Patches 500 | Coarse | 0.665 | 0.572 | 0.659 | 0.569 | 0.666 | 0.492 | 0.521 | 0.592 | 0.631 |
| Refined | 0.704 | 0.597 | 0.695 | 0.501 | 0.583 | 0.510 | 0.568 | 0.594 | 0.593 | |
| Patches 300 | Coarse | 0.581 | 0.515 | 0.604 | 0.555 | 0.594 | 0.441 | 0.398 | 0.527 | 0.584 |
| Refined | 0.585 | 0.505 | 0.501 | 0.552 | 0.666 | 0.450 | 0.449 | 0.530 | 0.573 | |
| Patches 200 | Coarse | 0.684 | 0.576 | 0.687 | 0.609 | 0.670 | 0.559 | 0.514 | 0.614 | 0.656 |
| Refined | 0.720 | 0.613 | 0.708 | 0.510 | 0.597 | 0.555 | 0.616 | 0.617 | 0.605 | |
| Patches 100 | Coarse | 0.795 | 0.702 | 0.777 | 0.683 | 0.767 | 0.702 | 0.698 | 0.732 | 0.742 |
| Refined | 0.796 | 0.703 | 0.780 | 0.681 | 0.764 | 0.707 | 0.704 | 0.733 | 0.741 | |
| Patches 50 | Coarse | 0.860 | 0.779 | 0.782 | 0.711 | 0.790 | 0.761 | 0.753 | 0.777 | 0.761 |
| Refined | 0.667 | 0.614 | 0.514 | 0.570 | 0.670 | 0.432 | 0.509 | 0.568 | 0.585 | |
| Patches 25 | Coarse | 0.896 | 0.839 | 0.752 | 0.711 | 0.795 | 0.78 | 0.757 | 0.790 | 0.753 |
| Refined | 0.706 | 0.6 | 0.448 | 0.562 | 0.611 | 0.494 | 0.488 | 0.558 | 0.540 |
| Evergreen | wM1 | wM2 | wM3 | wM4 | wM5 | wM6 | wM7 | AVG | AVG Site1 | |
|---|---|---|---|---|---|---|---|---|---|---|
| UNet | ||||||||||
| LR 0.3 | 0.856 | 0.822 | 0.364 | 0.576 | 0.708 | 0.785 | 0.620 | 0.676 | 0.549 | |
| LR 0.04 | 0.894 | 0.806 | 0.798 | 0.767 | 0.828 | 0.769 | 0.612 | 0.782 | 0.797 | |
| LR 0.003 | 0.855 | 0.802 | 0.803 | 0.626 | 0.761 | 0.763 | 0.648 | 0.751 | 0.730 | |
| LR 0.0005 | 0.931 | 0.896 | 0.906 | 0.815 | 0.897 | 0.928 | 0.876 | 0.893 | 0.873 | |
| LR | 0.914 | 0.857 | 0.859 | 0.794 | 0.866 | 0.896 | 0.818 | 0.858 | 0.840 | |
| Resnet | ||||||||||
| Patches 500 | Coarse | 0.607 | 0.650 | 0.511 | 0.528 | 0.593 | 0.644 | 0.644 | 0.597 | 0.544 |
| Refined | 0.676 | 0.710 | 0.548 | 0.375 | 0.604 | 0.700 | 0.729 | 0.620 | 0.510 | |
| Patches 300 | Coarse | 0.697 | 0.729 | 0.651 | 0.634 | 0.661 | 0.723 | 0.691 | 0.684 | 0.648 |
| Refined | 0.804 | 0.345 | 0.744 | 0.708 | 0.676 | 0.800 | 0.809 | 0.698 | 0.709 | |
| Patches 200 | Coarse | 0.722 | 0.767 | 0.638 | 0.619 | 0.697 | 0.736 | 0.710 | 0.698 | 0.651 |
| Refined | 0.845 | 0.850 | 0.759 | 0.722 | 0.769 | 0.807 | 0.721 | 0.782 | 0.750 | |
| Patches 100 | Coarse | 0.865 | 0.844 | 0.796 | 0.767 | 0.806 | 0.847 | 0.803 | 0.818 | 0.789 |
| Refined | 0.887 | 0.869 | 0.884 | 0.689 | 0.873 | 0.907 | 0.877 | 0.855 | 0.815 | |
| Patches 50 | Coarse | 0.914 | 0.888 | 0.867 | 0.820 | 0.865 | 0.904 | 0.852 | 0.873 | 0.851 |
| Refined | 0.844 | 0.744 | 0.880 | 0.514 | 0.523 | 0.865 | 0.735 | 0.729 | 0.639 | |
| Patches 25 | Coarse | 0.923 | 0.875 | 0.881 | 0.84 | 0.89 | 0.926 | 0.843 | 0.883 | 0.870 |
| Refined | 0.424 | 0.529 | 0.621 | 0.514 | 0.55 | 0.656 | 0.675 | 0.567 | 0.562 |
| Onishi and Ise 2018 | Safonova et al. 2019 | Natesan et al. 2019 | Our Results | ||||
|---|---|---|---|---|---|---|---|
| Classes | Sens.% | Classes | Sens.% | Classes | Sens.% | Classes | Sens.% |
| Deciduous broadleaf | 95.83 | Healthy | 100.00 | Red Pine | 67.00 | Deciduous | 94.75 |
| Deciduous coniferous | 84.62 | Colonized | 86.11 | White Pine | 77.00 | Evergreen | 94.01 |
| Evergreen broadleaf | 68.00 | Recently died | 81.25 | None Pine | 97.00 | ||
| Chamaecyparis obtusa | 91.95 | Deadwood | 100.00 | ||||
| Pinus elliottii/taeda | 94.12 | ||||||
| Pinus strobus | 88.89 | ||||||
| Others | 88.20 | ||||||
| Average | 89.00 | 91.84 | 81.00 | 94.38 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kentsch, S.; Lopez Caceres, M.L.; Serrano, D.; Roure, F.; Diez, Y. Computer Vision and Deep Learning Techniques for the Analysis of Drone-Acquired Forest Images, a Transfer Learning Study. Remote Sens. 2020, 12, 1287. https://doi.org/10.3390/rs12081287
Kentsch S, Lopez Caceres ML, Serrano D, Roure F, Diez Y. Computer Vision and Deep Learning Techniques for the Analysis of Drone-Acquired Forest Images, a Transfer Learning Study. Remote Sensing. 2020; 12(8):1287. https://doi.org/10.3390/rs12081287
Chicago/Turabian StyleKentsch, Sarah, Maximo Larry Lopez Caceres, Daniel Serrano, Ferran Roure, and Yago Diez. 2020. "Computer Vision and Deep Learning Techniques for the Analysis of Drone-Acquired Forest Images, a Transfer Learning Study" Remote Sensing 12, no. 8: 1287. https://doi.org/10.3390/rs12081287
APA StyleKentsch, S., Lopez Caceres, M. L., Serrano, D., Roure, F., & Diez, Y. (2020). Computer Vision and Deep Learning Techniques for the Analysis of Drone-Acquired Forest Images, a Transfer Learning Study. Remote Sensing, 12(8), 1287. https://doi.org/10.3390/rs12081287