Small Multicopter-UAV-Based Radar Imaging: Performance Assessment for a Single Flight Track

 ,
, 
 , ,
, ,  and
and 
Abstract
1. Introduction
2. Imaging System
- Small M-UAV platform: DJI F550 hexacopter able to fly at very low speeds (about 1 m/s), thus ensuring a small spatial sampling step and the ability to take-off and land from a very small area;
- Radar system: Pulson P440 radar is a light and compact time-domain device transmitting ultra-wideband pulses (about 1.7 GHz bandwidth centered at the carrier frequency of 3.95 GHz) with a low power consumption [25]. The radar system is mounted rigidly on the UAV body (strapdown installation) and no gimbal is adopted. The limited altitude dynamics experienced during flights (very low ground speed and wind speed conditions resulting in small and almost constant roll/pitch angles), the relatively large radar antenna lobes and the limited baseline between the radar antenna and the drone center of mass are such that altitude/pointing knowledge does not play a significant role;
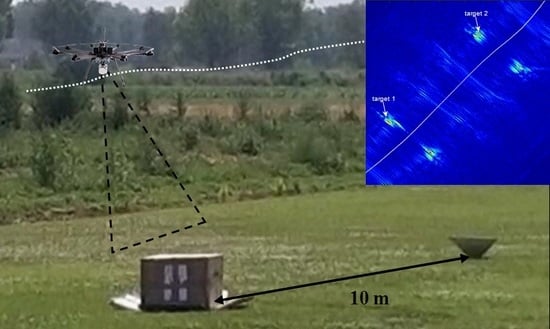
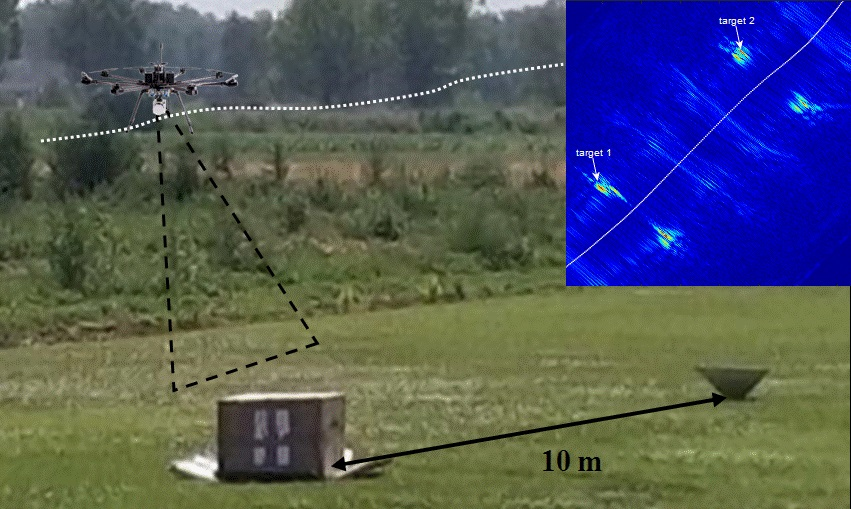
- GPS receivers/antennas: two single-frequency Ublox LEA-6T devices are chosen, one mounted onboard the UAV and the other one used as a ground-based station. Both are connected to an active patch antenna. The antenna is directly placed on the ground (Figure 1b) in order to get from CDGPS a direct estimate of the height above ground for the antenna mounted on the drone;
- CPU controller: Linux-based Odroid XU4 is devoted to managing the data acquisition for both radar system and onboard GPS receiver, while assuring their time synchronization.
3. Radar Signal Processing
- Zero-timing;
- Background removal;
- Time-gating.
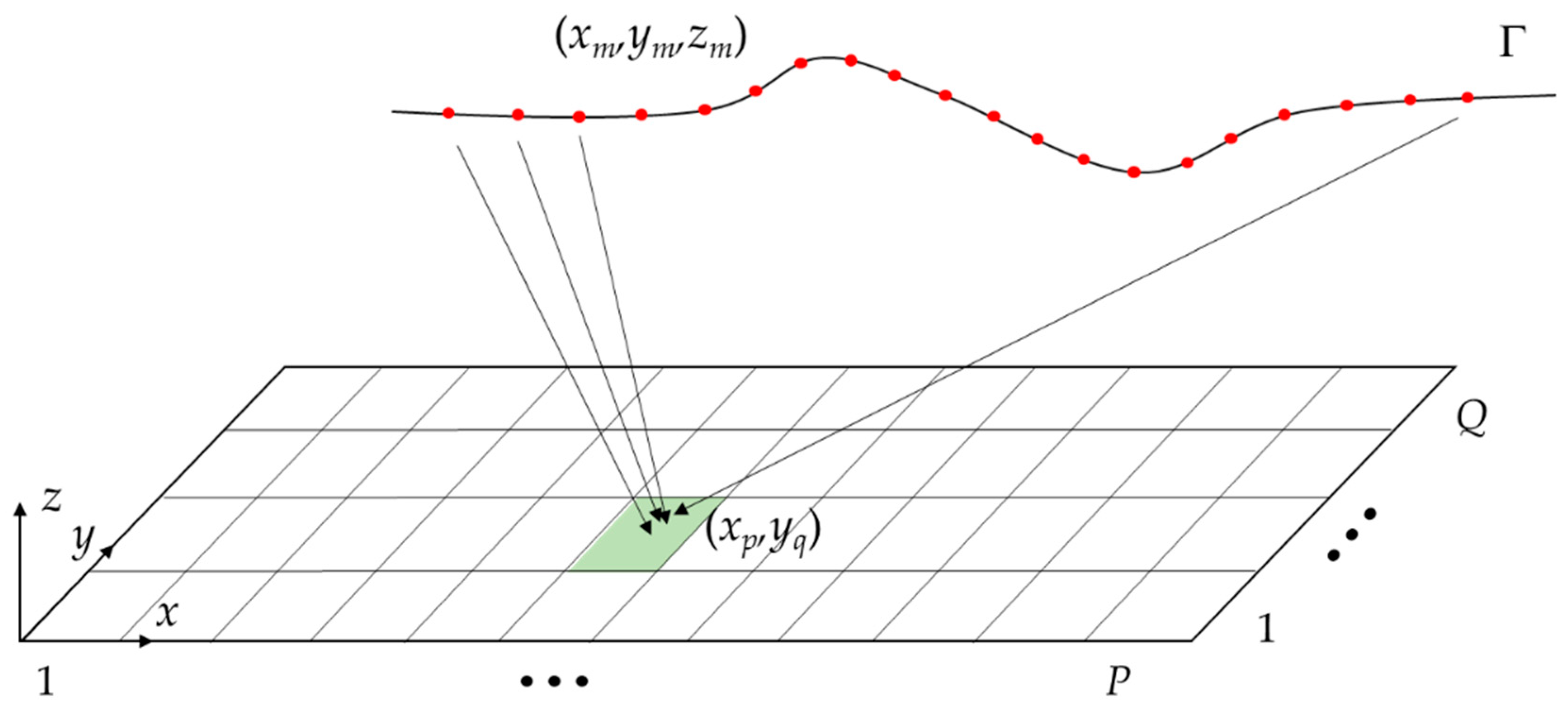
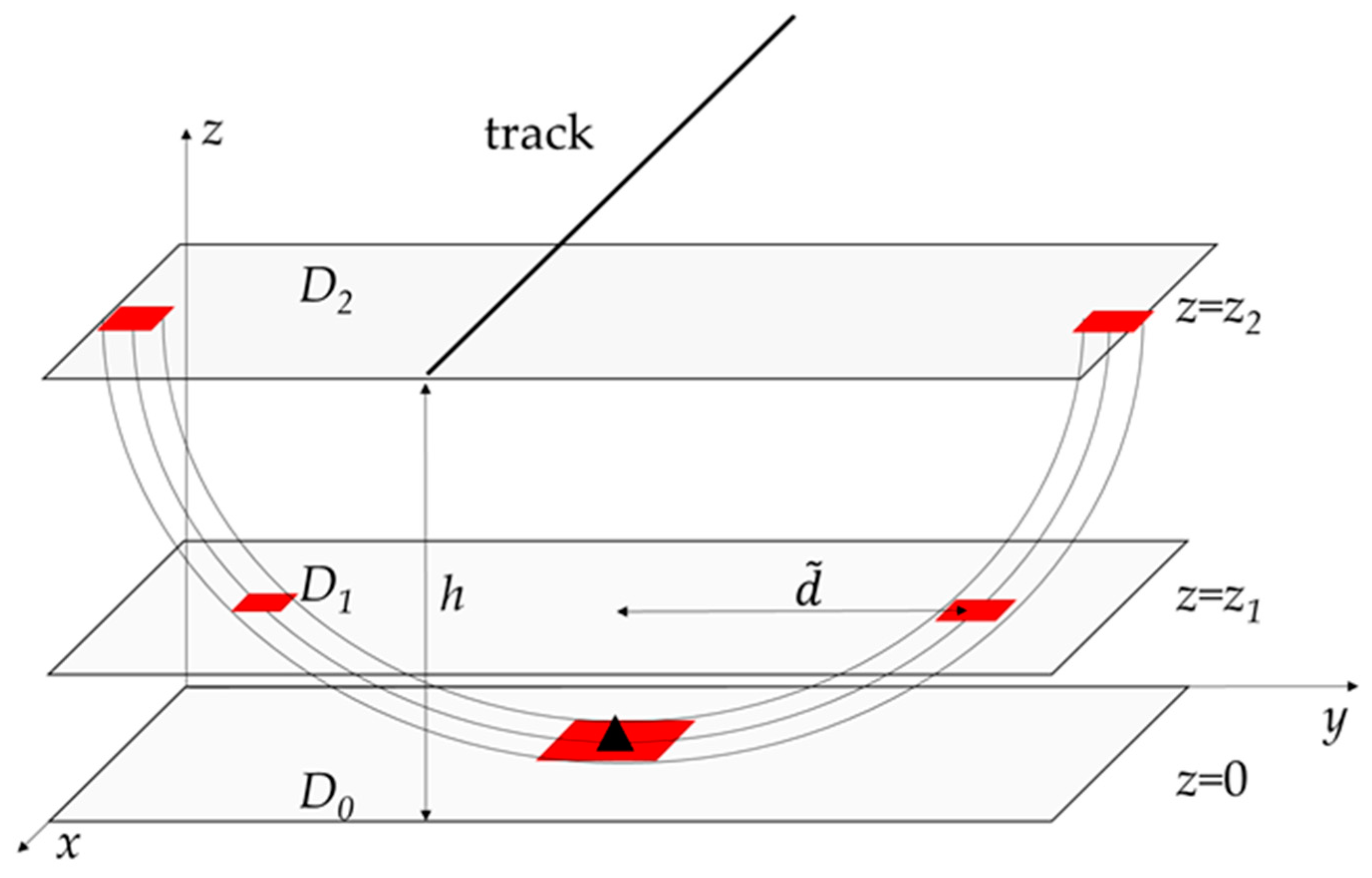
3.1. Radar Imaging Approach
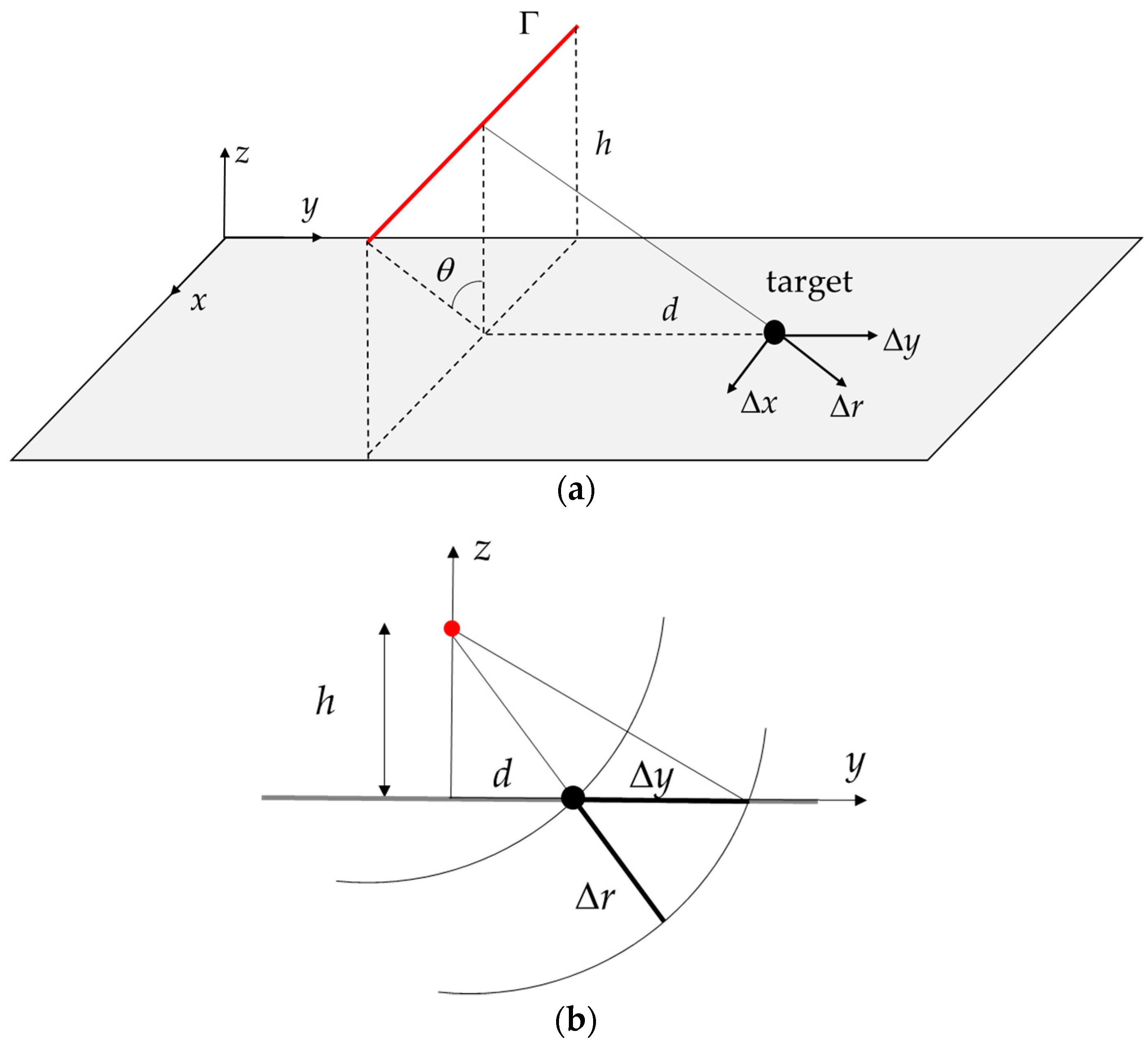
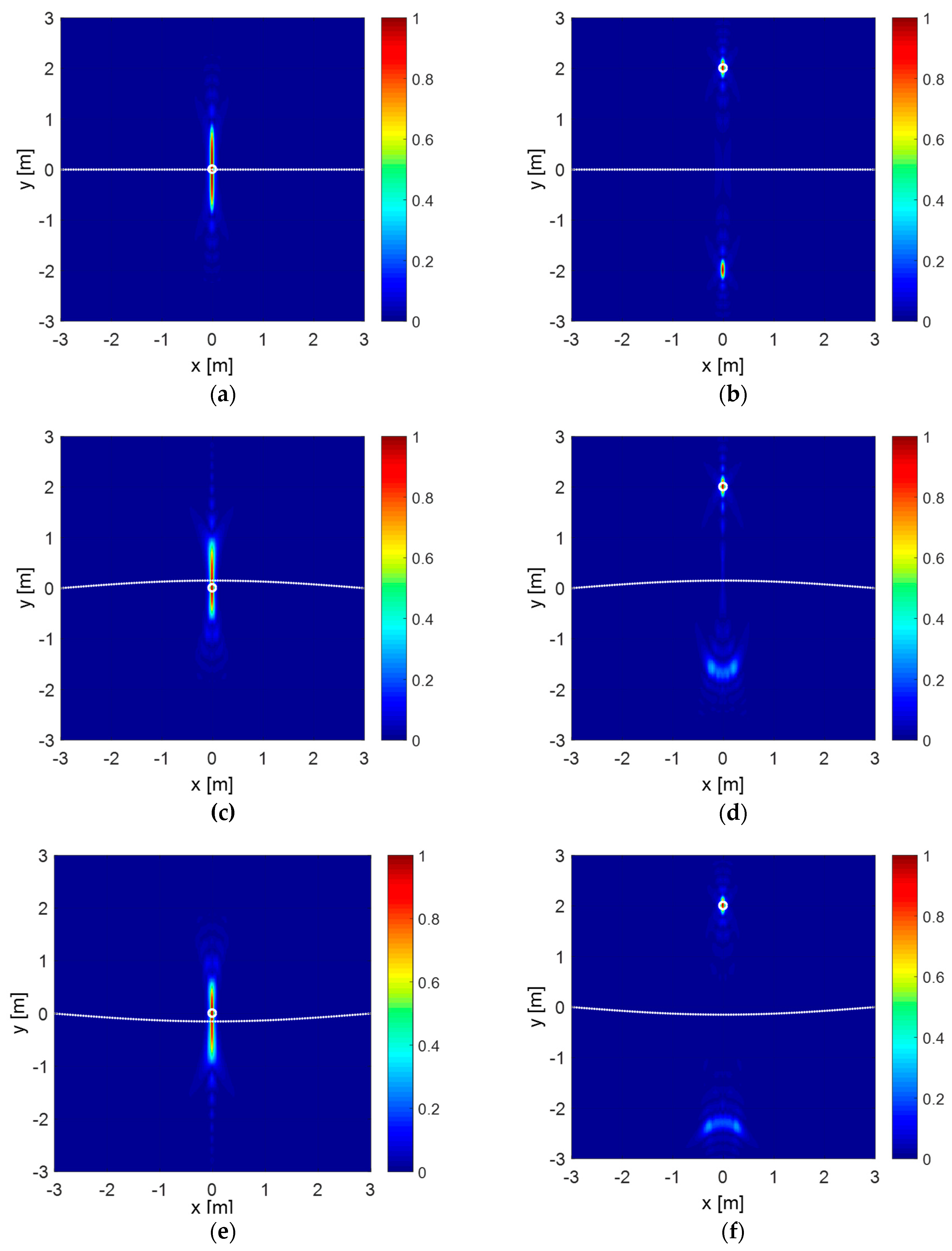
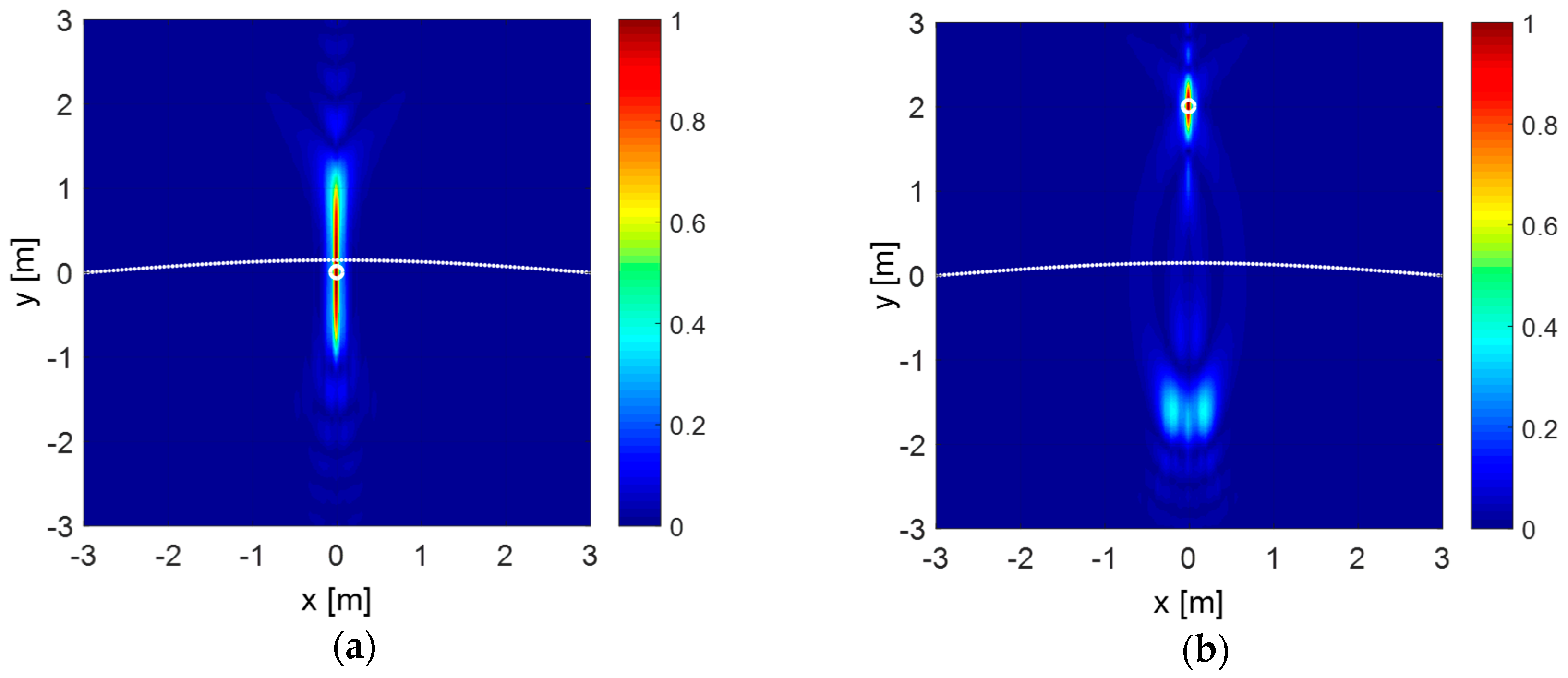
3.2. Resolution Analysis
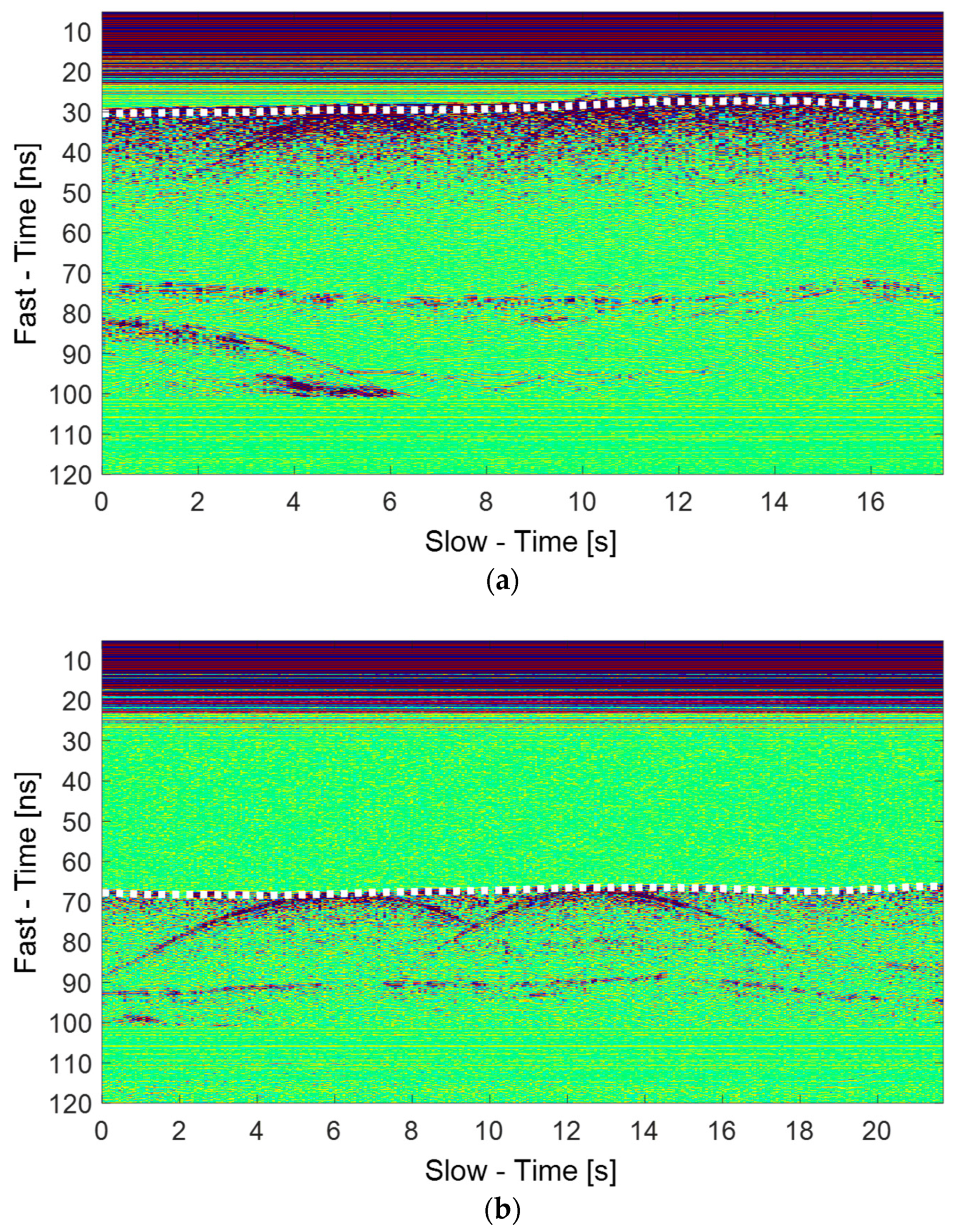
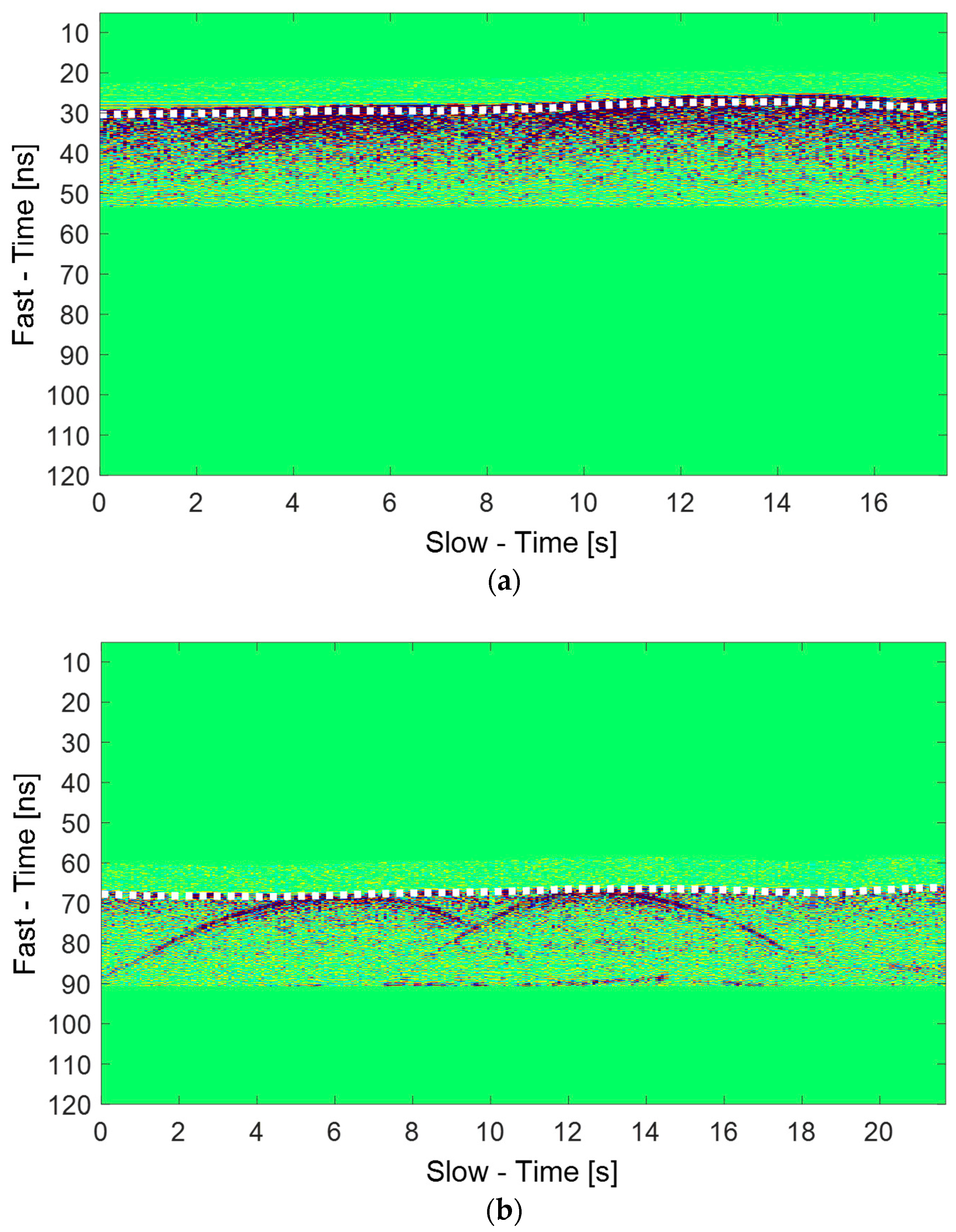
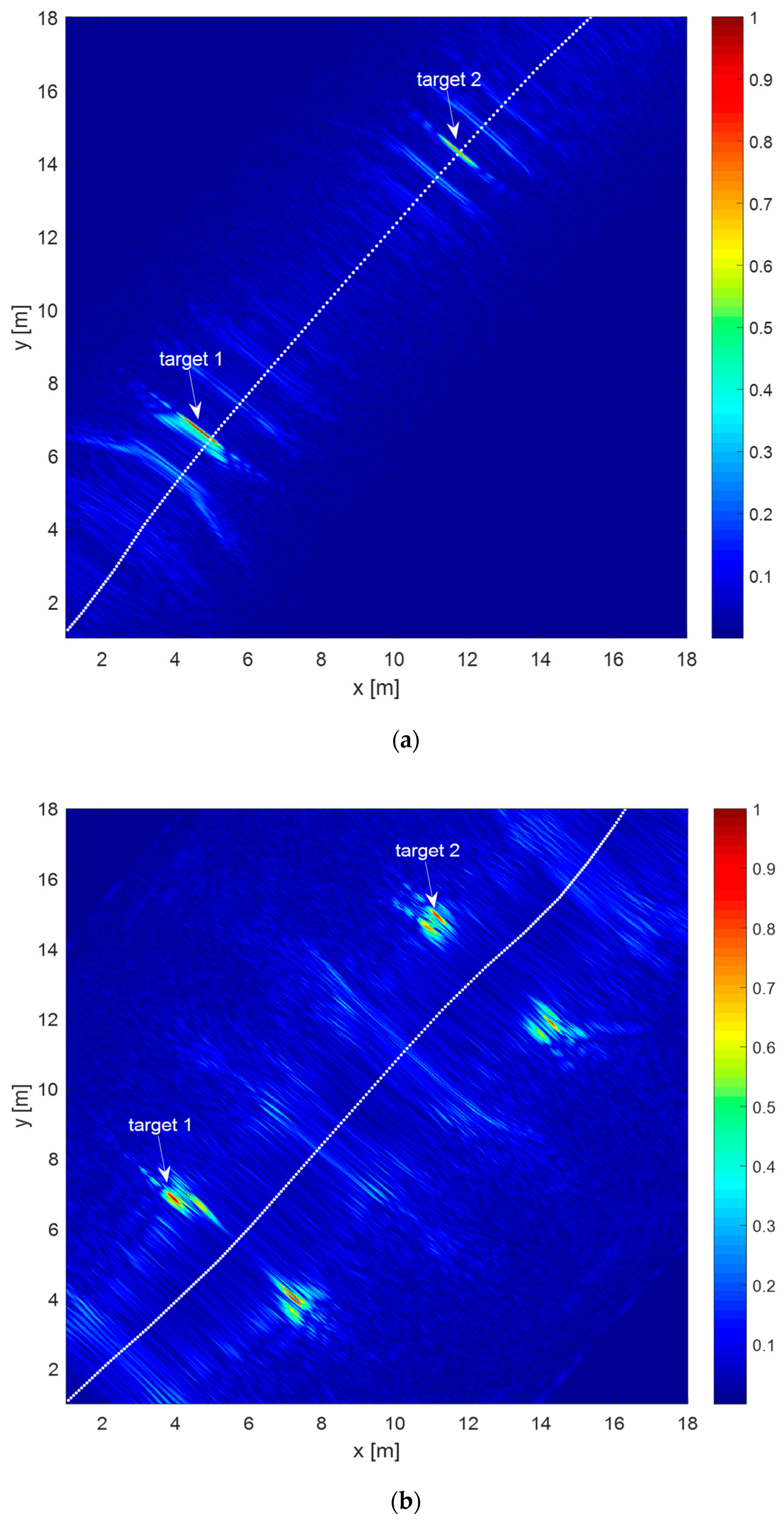
4. Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Everaerts, J. The Use of Unmanned Aerial Vehicles (UAVs) for Remote Sensing and Mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1187–1192. [Google Scholar]
- Quan, Q. Introduction to Multicopter Design and Control; Springer: Singapore, 2017. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Catapano, I.; Di Napoli, R.; Soldovieri, F.; Bavusi, M.; Loperte, A.; Dumoulin, J. Structural Monitoring via Microwave Tomography-Enhanced GPR: The Montagnole test site. J. Geophys. Eng. 2012, 9, 100–107. [Google Scholar] [CrossRef]
- Oriot, H.; Cantalloube, H. Circular SAR imagery for urban remote sensing. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for Small Unmanned Aerial Vehicles: A survey. Int. J. Control Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Massonnet, D.; Souyris, J.C. Imaging with Synthetic Aperture Radar; EPFL Press: Lausanne, Switzerland, 2008. [Google Scholar]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef]
- Li, C.J.; Ling, H. High-resolution, downward-looking radar imaging using a small consumer drone. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016; pp. 2037–2038. [Google Scholar]
- Bhardwaj, A.; Sam, L.; Akansha, L.; Martin-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Remy, M.A.; de Macedo, K.A.; Moreira, J.R. The first UAV-based P-and X-band interferometric SAR system. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 5041–5044. [Google Scholar]
- Llort, M.; Aguasca, A.; Lopez-Martinez, C.; Martínez-Marin, T. Initial Evaluation of SAR Capabilities in UAV Multicopter Platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 127–140. [Google Scholar] [CrossRef]
- Amiri, A.; Tong, K.; Chetty, K. Feasibility study of multi-frequency ground penetrating radar for rotary UAV platforms. In Proceedings of the IET International Conference on Radar Systems, Glasgow, UK, 22–25 October 2012; pp. 1–6. [Google Scholar]
- Fernández, M.G.; López, Y.Á.; Arboleya, A.A.; Valdés, B.G.; Vaqueiro, Y.R.; Andrés, F.L.H.; García, A.P. Synthetic aperture radar imaging system for landmine detection using a ground penetrating radar on board a unmanned aerial vehicle. IEEE Access 2018, 6, 45100–45112. [Google Scholar] [CrossRef]
- Soumekh, M. Synthetic Aperture Radar Signal Processing; Wiley: New York, NY, USA, 1999; Volume 7. [Google Scholar]
- Ludeno, G.; Catapano, I.; Renga, A.; Vetrella, A.; Fasano, G.; Soldovieri, F. Assessment of a micro-UAV system for microwave tomography radar imaging. Remote Sens. Environ. 2018, 212, 90–102. [Google Scholar] [CrossRef]
- Chao, H.; Gu, Y.; Napolitano, M. A Survey of Optical Flow Techniques for Robotics Navigation Applications. J. Intell. Robot. Syst. 2013, 73, 361–372. [Google Scholar] [CrossRef]
- Fletcher, I.; Watts, C.; Miller, E.; Rabinkin, D. Minimum entropy autofocus for 3D SAR images from a UAV platform. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Kaplan, E.; Hegarty, C.J. Understanding GPS–Principles and Applications, 2nd ed.; Artech House: Boston, MA, USA; London, UK, 2006. [Google Scholar]
- Available online: http://www.rtklib.com/rtklib_document.htm (accessed on 28 February 2020).
- Chew, W.C. Waves and Fields in Inhomogeneous Media; IEEE Press: Piscataway, NJ, USA, 1995. [Google Scholar]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Gennarelli, G.; Catapano, I.; Soldovieri, F. Reconstruction capabilities of down-looking airborne GPRs: The single frequency case. IEEE Trans. Comput. Imaging 2017, 3, 917–927. [Google Scholar] [CrossRef]
- Available online: https://www.humatics.com/products/scholar-radar/ (accessed on 28 February 2020).
- Standard, G.S.P. Available online: https://trade.ec.europa.eu/tradehelp/standard-gsp (accessed on 28 February 2020).
- Milbert, D. Dilution of precision revisited. Navigation 2008, 55, 67–81. [Google Scholar] [CrossRef]
- Farrell, J.A. Aided Navigation: GPS with High Rate Sensors; Mc Graw. Hill: New York, NY, USA, 2–5 June 2008. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Renga, A.; Fasano, G.; Accardo, D.; Grassi, M.; Tancredi, U.; Rufino, G.; Simonetti, A. Navigation facility for high accuracy offline trajectory and attitude estimation in airborne applications. Int. J. Navig. Obs. 2013, 1–13. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground penetrating radar. In Encyclopedia of RF and Microwave Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Catapano, I.; Gennarelli, G.; Ludeno, G.; Soldovieri, F.; Persico, R. Ground-Penetrating Radar: Operation Principle and Data Processing. Wiley Encycl. Electr. Electron. Eng. 2019, 1–23. [Google Scholar]
- Balanis, C.A. Advanced Engineering Electromagnetics; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Solimene, R.; Catapano, I.; Gennarelli, G.; Cuccaro, A.; Dell’Aversano, A.; Soldovieri, F. SAR Imaging Algorithms and some Unconventional Applications: A Unified Mathematical Overview. IEEE Signal Proc. Mag. 2014, 31, 90–98. [Google Scholar] [CrossRef]
- Harrington, R.F. Field Computation by Moment Methods; Wiley-IEEE Press: Hoboken, NJ, USA, 1993. [Google Scholar]
- Gennarelli, G.; Catapano, I.; Ludeno, G.; Noviello, C.; Papa, C.; Pica, G.; Soldovieri, F.; Alberti, G. A low frequency airborne GPR System for Wide Area Geophysical Surveys: The Case Study of Morocco Desert. Remote Sens. Environ. 2019, 233, 111409. [Google Scholar] [CrossRef]
- Scherzer, O. Handbook of Mathematical Methods in Imaging; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; Tata McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Cheney, M.; Borden, B. Fundamentals of Radar Imaging; Siam: Philadelphia, PA, USA, 2009; Volume 79. [Google Scholar]
- Gašparović, M.; Jurjević, L. Gimbal influence on the stability of exterior orientation parameters of UAV acquired images. Sensors 2017, 17, 401. [Google Scholar] [CrossRef] [PubMed]
- Pérez, J.A.; Gonçalves, G.R.; Rangel, J.M.G.; Ortega, P.F. Accuracy and effectiveness of orthophotos obtained from low cost UASs video imagery for traffic accident scenes documentation. Adv. Eng. Softw. 2019, 132, 47–54. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Along-Track Resolution (m) | Across-Track Resolution (m) | |
|---|---|---|
| Rectilinear path, target offset m, flight altitude m | 0.04 | 0.95 |
| Rectilinear path, target offset m, flight altitude m | 0.04 | 0.25 |
| Path , target offset m, flight altitude m | 0.04 | 0.95 |
| Path , target offset m, flight altitude m | 0.04 | 0.25 |
| Path , target offset m, flight altitude m | 0.04 | 0.95 |
| Path , target offset m, flight altitude m | 0.04 | 0.25 |
| Path , target offset m, flight altitude m | 0.07 | 1.30 |
| Path , target offset m, flight altitude m | 0.07 | 0.47 |
| Parameters | Specification |
|---|---|
| Carrier Frequency | 3.95 GHz |
| Frequency Band | 1.7 GHz |
| Maximum Emitted Power | –13 dBm |
| Maximum Dynamic Range | 75 dB |
| Pulse Repetition Frequency | 14.28 Hz |
| Received Signal Sampling Frequency | 16 GHz |
| Errors (cm) | x | y | z |
|---|---|---|---|
| Track 1 | 4.3 | 4.6 | 9.4 |
| Track 2 | 0.6 | 0.8 | 1.5 |
| Experimental Along-Track Resolution (m) | Theoretical Along-Track Resolution (m) | Experimental Across-Track Resolution (m) | Theoretical Across-Track Resolution (m) | ||
|---|---|---|---|---|---|
| Track 11 | Target 1 | 0.05 | 0.02 | 1.15 | 0.85 |
| Target 2 | 0.04 | 0.02 | 0.99 | 0.85 | |
| Track 22 | Target 1 | 0.07 | 0.03 | 0.51 | 0.41 |
| Target 2 | 0.09 | 0.03 | 0.50 | 0.41 |
| True Target Position | Retrieved Target Positions Versus Height of Image Plane | |||
|---|---|---|---|---|
| z = 0 m | z = 0.2 m | z = 0.4 m | ||
| T1 | (−2, 0, 0) m | (−2, 0, 0) m | (−2, ±1.4, 0.2) | (−2, ±1.99, 0.4) m |
| T2 | (0, 0, 0.2) m | - | (0, 0, 0.2) | (0, ±1.4, 0.4) m |
| T3 | (2, 0, 0.4) m | - | - | (2, 0, 0.4) m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Catapano, I.; Gennarelli, G.; Ludeno, G.; Noviello, C.; Esposito, G.; Renga, A.; Fasano, G.; Soldovieri, F. Small Multicopter-UAV-Based Radar Imaging: Performance Assessment for a Single Flight Track. Remote Sens. 2020, 12, 774. https://doi.org/10.3390/rs12050774
Catapano I, Gennarelli G, Ludeno G, Noviello C, Esposito G, Renga A, Fasano G, Soldovieri F. Small Multicopter-UAV-Based Radar Imaging: Performance Assessment for a Single Flight Track. Remote Sensing. 2020; 12(5):774. https://doi.org/10.3390/rs12050774
Chicago/Turabian StyleCatapano, Ilaria, Gianluca Gennarelli, Giovanni Ludeno, Carlo Noviello, Giuseppe Esposito, Alfredo Renga, Giancarmine Fasano, and Francesco Soldovieri. 2020. "Small Multicopter-UAV-Based Radar Imaging: Performance Assessment for a Single Flight Track" Remote Sensing 12, no. 5: 774. https://doi.org/10.3390/rs12050774
APA StyleCatapano, I., Gennarelli, G., Ludeno, G., Noviello, C., Esposito, G., Renga, A., Fasano, G., & Soldovieri, F. (2020). Small Multicopter-UAV-Based Radar Imaging: Performance Assessment for a Single Flight Track. Remote Sensing, 12(5), 774. https://doi.org/10.3390/rs12050774