The New Potential of Deep Convective Clouds as a Calibration Target for a Geostationary UV/VIS Hyperspectral Spectrometer


Abstract
1. Introduction
2. Data and Methods
2.1. UV–VIS Hyperspectral Sensor
2.1.1. GEMS
2.1.2. OMI and TROPOMI
2.2. DCC Climatology
2.2.1. AHI Data Processing
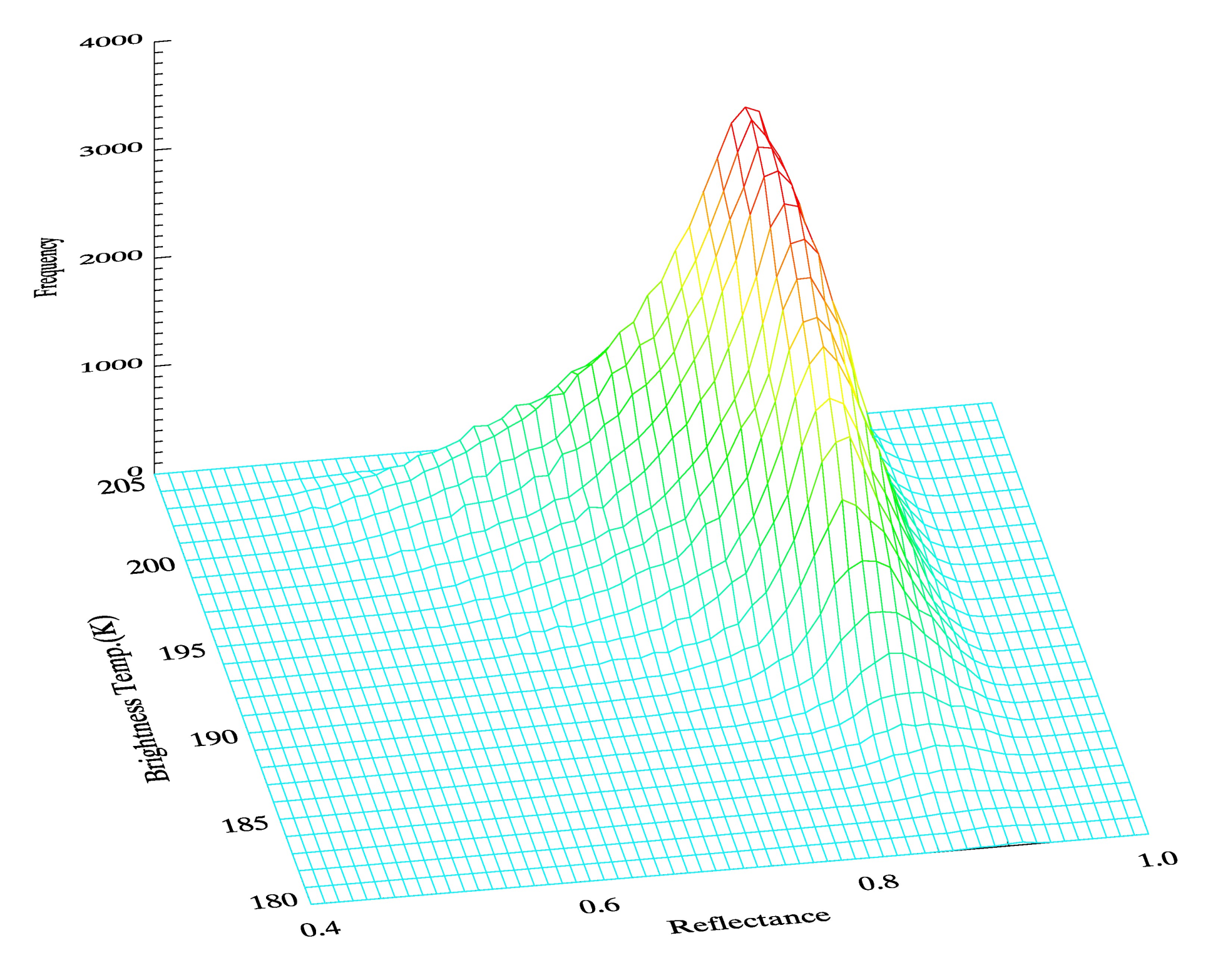
2.2.2. Frequency Distribution
2.3. DCC Reflectivity Spectrum
2.3.1. Collocation Process
2.3.2. Apparent Reflectivity of DCCs
3. Results
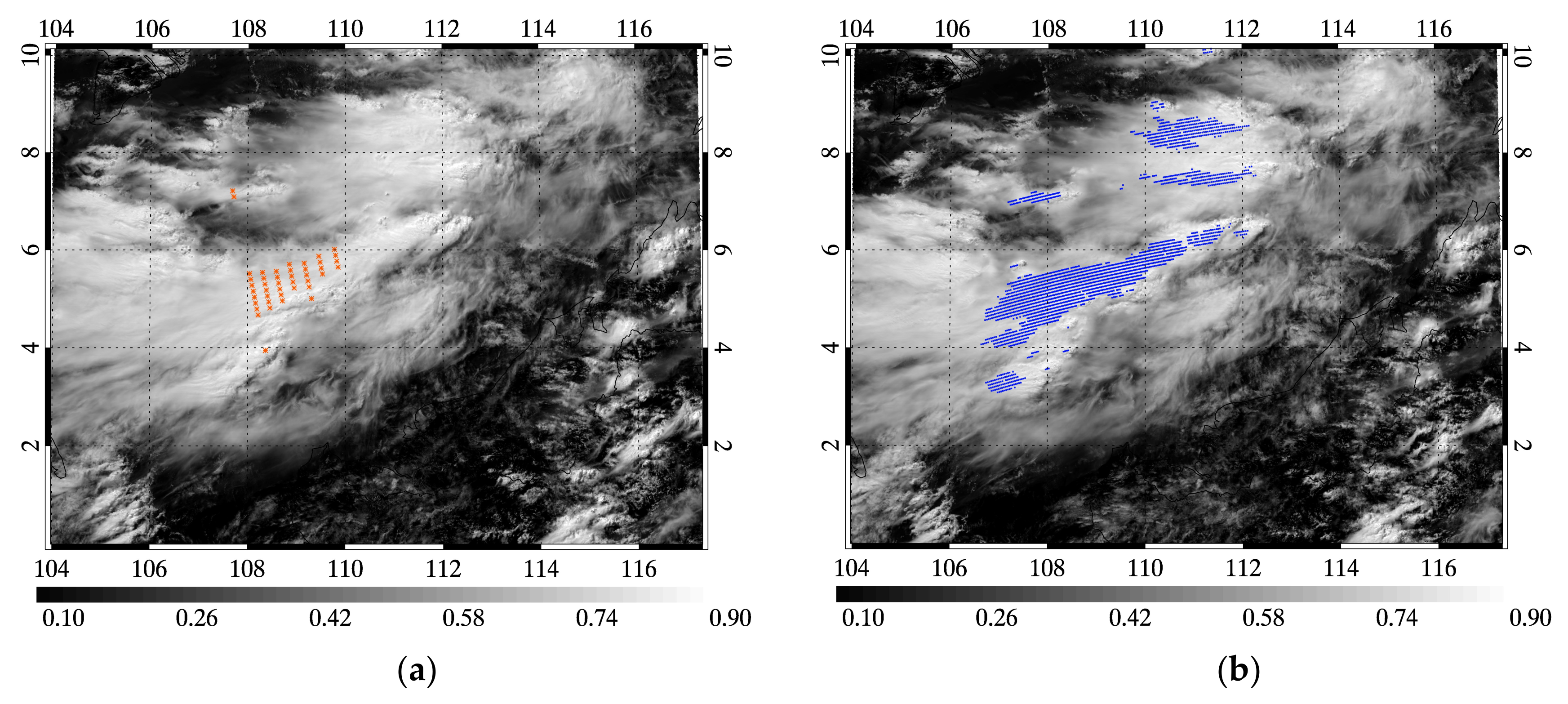
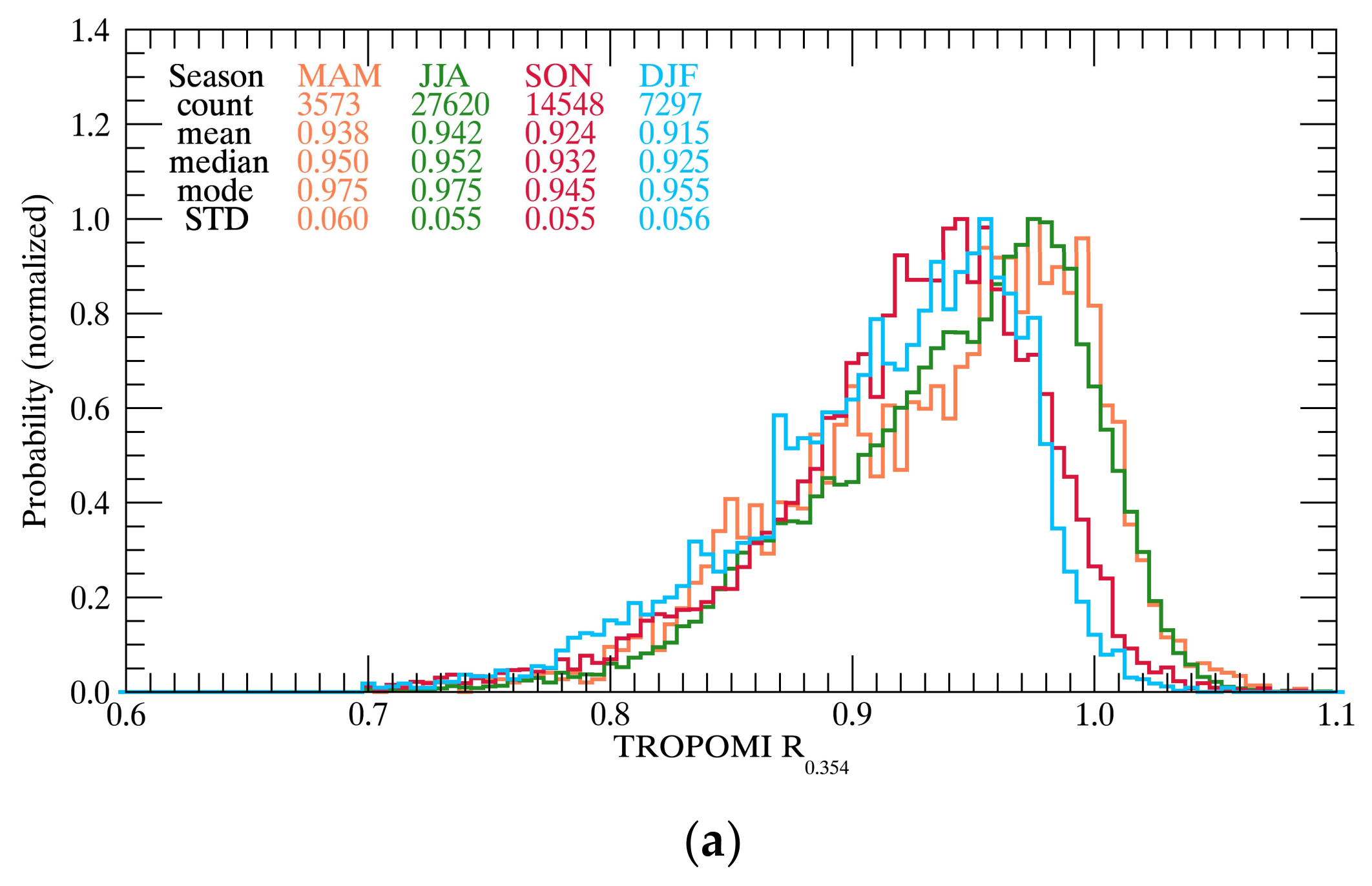
3.1. DCCs Detected Using the OMI and TROPOMI
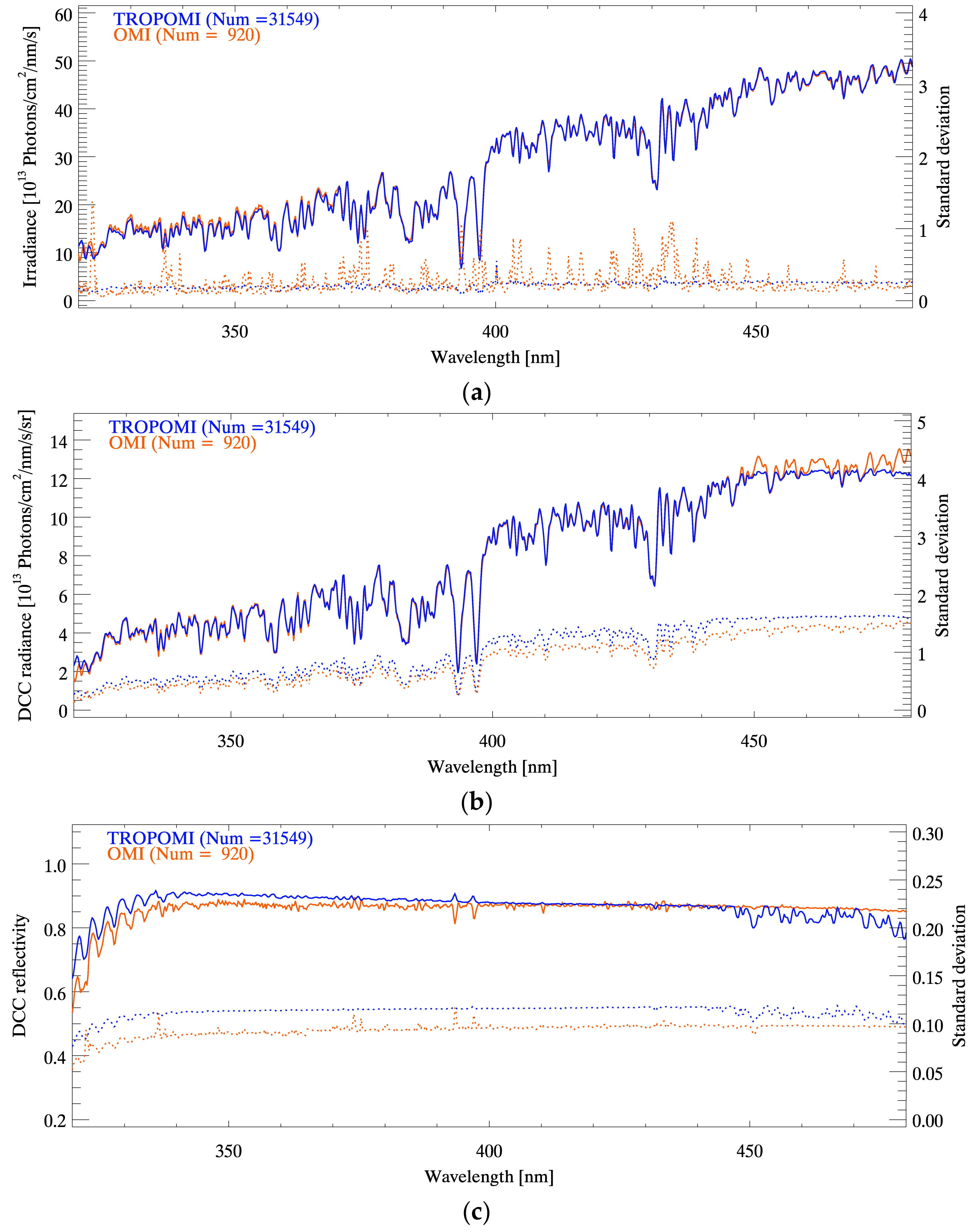
3.2. DCC Reflectivity Spectrum
3.3. Improvement in DCC Detection
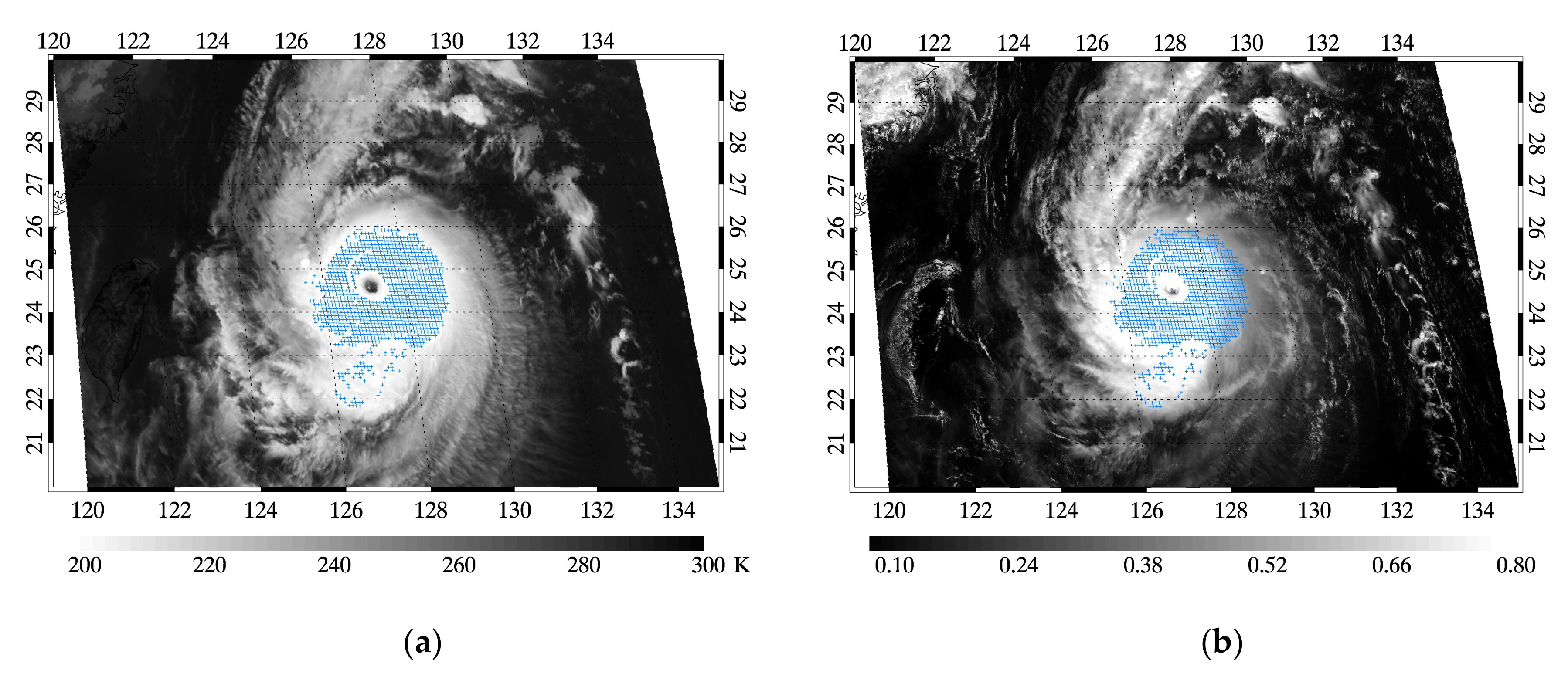
3.3.1. Comparison of VIS and IR Radiation
3.3.2. DCC Detection with Additional VIS Reflectivity
4. Discussion
4.1. Verification of the Updated DCC Detection Method
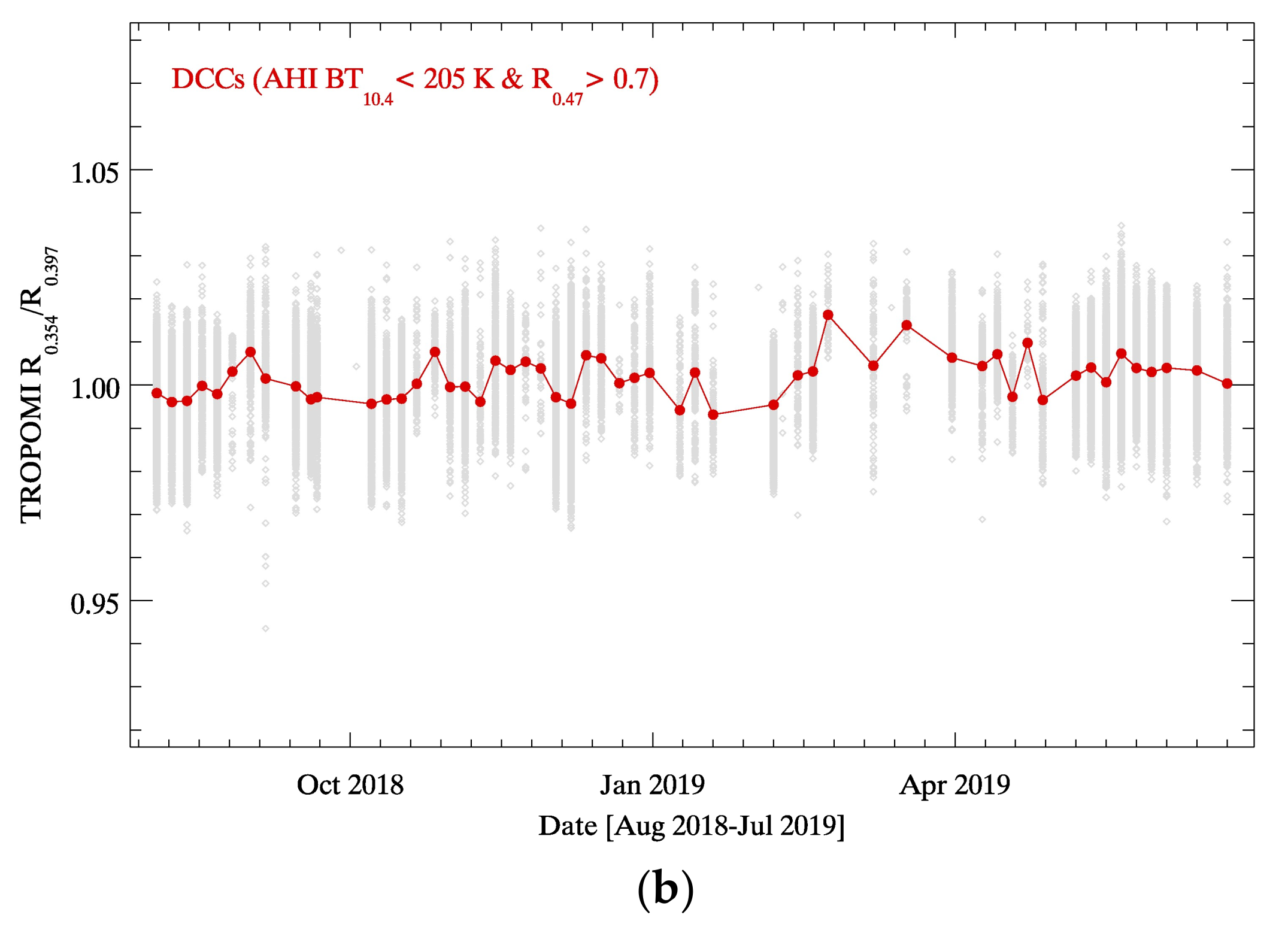
4.1.1. Spectral Analysis of DCC Reflectivity
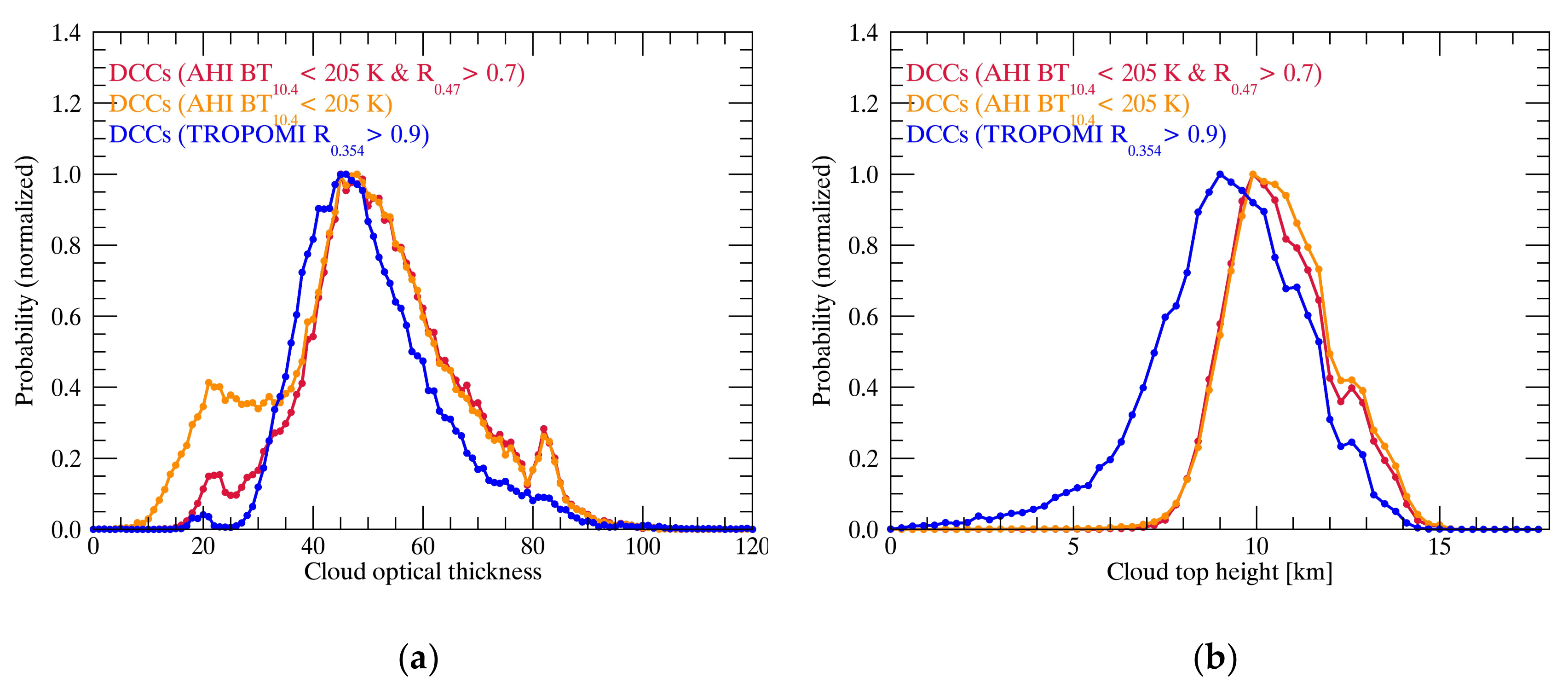
4.1.2. Cloud Properties of DCCs
4.2. Feasibility and Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, H.-O.; Kim, H.-S.; Lim, H.-S.; Choi, H.-J. Space-Based Earth Observation Activities in South Korea [Space Agencies]. IEEE Geosci. Remote Sens. Mag. 2015, 3, 34–39. [Google Scholar] [CrossRef]
- Choi, W.J.; Moon, K.-J.; Yoon, J.; Cho, A.; Kim, S.; Lee, S.; Ko, D.H.; Kim, J.; Ahn, M.H.; Kim, D.-R.; et al. Introducing the geostationary environment monitoring spectrometer. J. Appl. Remote Sens. 2019, 13, 1. [Google Scholar] [CrossRef]
- Veefkind, J.P.; De Leeuw, G.; Stammes, P.; Koelemeijer, R.B.A. Regional distribution of aerosol over land, derived from ATSR-2 and GOME. Remote Sens. Environ. 2000, 74, 377–386. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Zhang, Q.; Li, Z.L. Validation of the land-surface temperature products retrieved from terra moderate resolution imaging spectroradiometer data. Remote Sens. Environ. 2002, 83, 163–180. [Google Scholar] [CrossRef]
- Boersma, K.F.; Eskes, H.J.; Veefkind, J.P.; Brinksma, E.J.; Van Der A, R.J.; Sneep, M.; Van Den Oord, G.H.J.; Levelt, P.F.; Stammes, P.; Gleason, J.F.; et al. Atmospheric Chemistry and Physics Near-real time retrieval of tropospheric NO2 from OMI. Atmos. Chem. Phys 2007, 7, 2103–2118. [Google Scholar] [CrossRef]
- Gloudemans, A.M.S.; Schrijver, H.; Hasekamp, O.P.; Aben, I. Error analysis for CO and CH4 total column retrievals from SCIAMACHY 2.3 μm spectra. Atmos. Chem. Phys. 2008, 8, 3999–4017. [Google Scholar] [CrossRef]
- Loyola, D.G.; Koukouli, M.E.; Valks, P.; Balis, D.S.; Hao, N.; Van Roozendael, M.; Spurr, R.J.D.; Zimmer, W.; Kiemle, S.; Lerot, C.; et al. The GOME-2 total column ozone product: Retrieval algorithm and ground-based validation. J. Geophys. Res. Atmos. 2011, 116, 1–11. [Google Scholar] [CrossRef]
- Yoshida, Y.; Ota, Y.; Eguchi, N.; Kikuchi, N.; Nobuta, K.; Tran, H.; Morino, I.; Yokota, T. Retrieval algorithm for CO2 and CH4 column abundances from short-wavelength infrared spectral observations by the Greenhouse gases observing satellite. Atmos. Meas. Tech. 2011, 4, 717–734. [Google Scholar] [CrossRef]
- Dinguirard, M.; Slater, P.N. Calibration of space-multispectral imaging sensors: A review. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Kowalewski, M.G.; Jaross, G.; Cebula, R.P.; Taylor, S.L.; van den Oord, G.H.J.; Dobber, M.R.; Dirksen, R. Evaluation of the Ozone Monitoring Instrument’s pre-launch radiometric calibration using in-flight data. In Proceedings of the Optics and Photonics 2005, San Diego, CA, USA, 22 August 2005. [Google Scholar]
- Jaross, G.; Warner, J. Use of Antarctica for validating reflected solar radiation measured by satellite sensors. J. Geophys. Res. Atmos. 2008, 113, 1–13. [Google Scholar] [CrossRef]
- Brook, A.; Dor, E. Ben Supervised vicarious calibration (SVC) of hyperspectral remote-sensing data. Remote Sens. Environ. 2011, 115, 1543–1555. [Google Scholar] [CrossRef]
- Sterckx, S.; Livens, S.; Adriaensen, S. Rayleigh, Deep Convective Clouds, and Cross-Sensor Desert Vicarious Calibration Validation for the PROBA-V Mission. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1437–1452. [Google Scholar] [CrossRef]
- Bhatt, R.; Doelling, D.R.; Wu, A.; Xiong, X.; Scarino, B.R.; Haney, C.O.; Gopalan, A. Initial stability assessment of S-NPP VIIRS reflective solar band calibration using invariant desert and deep convective cloud targets. Remote Sens. 2014, 6, 2809–2826. [Google Scholar] [CrossRef]
- Di Giuseppe, F.; Tompkins, A.M. Three-dimensional radiative transfer in tropical deep convective clouds. J. Geophys. Res. D Atmos. 2003, 108, 4741. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, G.Y.; Stephens, G.L. CloudSat adding new insight into tropical penetrating convection. Geophys. Res. Lett. 2008, 35, 2–6. [Google Scholar] [CrossRef]
- Setvák, M.; Lindsey, D.T.; Rabin, R.M.; Wang, P.K.; Demeterová, A. Indication of water vapor transport into the lower stratosphere above midlatitude convective storms: Meteosat Second Generation satellite observations and radiative transfer model simulations. Atmos. Res. 2008, 89, 170–180. [Google Scholar] [CrossRef]
- Fan, J.; Leung, L.R.; Rosenfeld, D.; Chen, Q.; Li, Z.; Zhang, J.; Yan, H. Microphysical effects determine macrophysical response for aerosol impacts on deep convective clouds. Proc. Natl. Acad. Sci. USA 2013, 110, E4581–E4590. [Google Scholar] [CrossRef]
- Loeb, N.G.; Manalo-Smith, N.; Kato, S.; Miller, W.F.; Gupta, S.K.; Minnis, P.; Wielicki, B.A. Angular Distribution Models for Top-of-Atmosphere Radiative Flux Estimation from the Clouds and the Earth’s Radiant Energy System Instrument on the Tropical Rainfall Measuring Mission Satellite. Part I: Methodology. J. Appl. Meteorol. 2003, 42, 240–265. [Google Scholar] [CrossRef]
- Yongxiang, H.; Wielicki, B.A.; Ping, Y.; Stackhouse, P.W.; Lin, B.; Young, D.F. Application of deep convective cloud albedo observation to satellite-based study of the terrestrial atmosphere: Monitoring the stability of spaceborne measurements and assessing absorption anomaly. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2594–2599. [Google Scholar] [CrossRef]
- Sohn, B.-J.; Ham, S.-H.; Yang, P. Possibility of the Visible-Channel Calibration Using Deep Convective Clouds Overshooting the TTL. J. Appl. Meteorol. Climatol. 2009, 48, 2271–2283. [Google Scholar] [CrossRef]
- Bhatt, R.; Doelling, D.; Scarino, B.; Haney, C.; Gopalan, A. Development of Seasonal BRDF Models to Extend the Use of Deep Convective Clouds as Invariant Targets for Satellite SWIR-Band Calibration. Remote Sens. 2017, 9, 1061. [Google Scholar] [CrossRef]
- Schmetz, J.; Tjemkes, S.A.; Gube, M.; Van De Berg, L. Monitoring deep convection and convective overshooting with METEOSAT. Adv. Sp. Res. 1997, 19, 433–441. [Google Scholar] [CrossRef]
- Doelling, D.R.; Nguyen, L.; Minnis, P. On the use of deep convective clouds to calibrate AVHRR data. In Proceedings of the Optical Science and Technology, the SPIE 49th Annual Meeting, Denver, CO, USA, 26 October 2004. [Google Scholar]
- Minnis, P.; Doelling, D.R.; Nguyen, L.; Miller, W.F.; Chakrapani, V. Assessment of the Visible Channel Calibrations of the VIRS on TRMM and MODIS on Aqua and Terra. J. Atmos. Ocean. Technol. 2008, 25, 385–400. [Google Scholar] [CrossRef]
- Doelling, D.; Morstad, D.; Bhatt, R.; Scarino, B. Algorithm Theoretical Basis Document (ATBD) for Deep Convective Cloud (DCC) technique of calibrating GEO sensors with Aqua-MODIS for GSICS. Available online: http://gsics.atmos.umd.edu/pub/Development/AtbdCentral/GSICS_ATBD_DCC_NASA_2011_09.pdf (accessed on 31 January 2020).
- Doelling, D.R.; Morstad, D.; Scarino, B.R.; Bhatt, R.; Gopalan, A. The Characterization of Deep Convective Clouds as an Invariant Calibration Target and as a Visible Calibration Technique. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1147–1159. [Google Scholar] [CrossRef]
- Wang, W.; Cao, C. DCC Radiometric Sensitivity to Spatial Resolution, Cluster Size, and LWIR Calibration Bias Based on VIIRS Observations. J. Atmos. Ocean. Technol. 2015, 32, 48–60. [Google Scholar] [CrossRef]
- Wang, W.; Cao, C. Monitoring the NOAA operational VIIRS RSB and DNB calibration stability using monthly and semi-monthly deep convective clouds time series. Remote Sens. 2016, 8, 1–19. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X. Radiometric inter-calibration between Himawari-8 AHI and S-NPP viirs for the solar reflective bands. Remote Sens. 2016, 8, 1–16. [Google Scholar] [CrossRef]
- Ai, Y.; Li, J.; Shi, W.; Schmit, T.J.; Cao, C.; Li, W. Deep convective cloud characterizations from both broadband imager and hyperspectral infrared sounder measurements. J. Geophys. Res. 2017, 122, 1700–1712. [Google Scholar] [CrossRef]
- Schenkeveld, V.M.E.; Jaross, G.; Marchenko, S.; Haffner, D.; Kleipool, Q.L.; Rozemeijer, N.C.; Veefkind, J.P.; Levelt, P.F. In-flight performance of the Ozone Monitoring Instrument. Atmos. Meas. Tech. 2017, 10, 1957–1986. [Google Scholar] [CrossRef]
- Sneep, M.; de Haan, J.F.; Stammes, P.; Wang, P.; Vanbauce, C.; Joiner, J.; Vasilkov, A.P.; Levelt, P.F. Three-way comparison between OMI and PARASOL cloud pressure products. J. Geophys. Res. 2008, 113, 1–11. [Google Scholar] [CrossRef]
- Vasilkov, A.; Joiner, J.; Spurr, R.; Bhartia, P.K.; Levelt, P.; Stephens, G. Evaluation of the OMI cloud pressures derived from rotational Raman scattering by comparisons with other satellite data and radiative transfer simulations. J. Geophys. Res. 2008, 113, D15S19. [Google Scholar] [CrossRef]
- Kim, J.; Jeong, U.; Ahn, M.-H.; Kim, J.H.; Park, R.J.; Lee, H.; Song, C.H.; Choi, Y.-S.; Lee, K.-H.; Yoo, J.-M.; et al. New Era of Air Quality Monitoring from Space: Geostationary Environment Monitoring Spectrometer (GEMS). Bull. Am. Meteorol. Soc. 2019, 84, 00. [Google Scholar] [CrossRef]
- Lambert, J.-C.; Keppens, A.; Hubert, D.; Langerock, B.; Eichmann, K.-U.; Kleipool, Q.; Sneep, M.; Verhoelst, T.; Wagner, T.; Weber, M.; et al. Quarterly Validation Report of the Copernicus Sentinel-5 Precursor Operational Data Products #04: April 2018–August 2019; Tropomi: De Bilt, The Netherlands, 20 April; pp. 1–125.
- Hong, G.; Heygster, G.; Miao, J.; Kunzi, K. Detection of tropical deep convective clouds from AMSU-B water vapor channels measurements. J. Geophys. Res. D Atmos. 2005, 110, 1–15. [Google Scholar] [CrossRef]
- Liu, C.; Zipser, E.J.; Nesbitt, S.W. Global distribution of tropical deep convection: Different perspectives from TRMM infrared and radar data. J. Clim. 2007, 20, 489–503. [Google Scholar] [CrossRef]
- Sassen, K.; Wang, Z.; Liu, D. Cirrus clouds and deep convection in the tropics: Insights from CALIPSO and CloudSat. J. Geophys. Res. 2009, 114, D00H06. [Google Scholar] [CrossRef]
- Alcala, C.M.; Dessler, A.E. Observations of deep convection in the tropics using the Tropical Rainfall Measuring Mission (TRMM) precipitation radar. J. Geophys. Res. Atmos. 2002, 107, 4792. [Google Scholar] [CrossRef]
- Jiang, J.H.; Wang, B.; Goya, K.; Hocke, K.; Eckermann, S.D.; Ma, J.; Wu, D.L.; Read, W.G. Geographical distribution and interseasonal variability of tropical deep convection: UARS MLS observations and analyses. J. Geophys. Res. Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Rossow, W.B.; Kinne, S.; Ackerman, S.; Cesana, G.; Chepfer, H.; Di Girolamo, L.; Getzewich, B.; Guignard, A.; Heidinger, A.; et al. Assessment of Global Cloud Datasets from Satellites: Project and Database Initiated by the GEWEX Radiation Panel. Bull. Am. Meteorol. Soc. 2013, 94, 1031–1049. [Google Scholar] [CrossRef]
- Ahmad, Z.; Bhartia, P.K.; Krotkov, N. Spectral properties of backscattered UV radiation in cloudy atmospheres. J. Geophys. Res. D Atmos. 2004, 109, D01201. [Google Scholar] [CrossRef]
- Hewison, T.J.; Wu, X.; Yu, F.; Tahara, Y.; Hu, X.; Kim, D.; Koenig, M. GSICS inter-calibration of infrared channels of geostationary imagers using metop/IASI. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1160–1170. [Google Scholar] [CrossRef]
- Dobber, M.; Kleipool, Q.; Dirksen, R.; Levelt, P.; Jaross, G.; Taylor, S.; Kelly, T.; Flynn, L.; Leppelmeier, G.; Rozemeijer, N. Validation of Ozone Monitoring Instrument level 1b data products. J. Geophys. Res. 2008, 113, 1–12. [Google Scholar] [CrossRef]
- Bodhaine, B.A.; Wood, N.B.; Dutton, E.G.; Slusser, J.R. On Rayleigh optical depth calculations. J. Atmos. Ocean. Technol. 1999, 16, 1854–1861. [Google Scholar] [CrossRef]
- Pinto da Silva Neto, C.; Alves Barbosa, H.; Assis Beneti, C.A. A method for convective storm detection using satellite data. Atmósfera 2016, 29, 343–358. [Google Scholar] [CrossRef]
- Joiner, J.; Bhartia, P.K.; Cebula, R.P.; Hilsenrath, E.; McPeters, R.D.; Park, H. Rotational Raman scattering (Ring effect) in satellite backscatter ultraviolet measurements. Appl. Opt. 1995, 34, 4513. [Google Scholar] [CrossRef] [PubMed]
- Loyola, D.G.; Gimeno García, S.; Lutz, R.; Argyrouli, A.; Romahn, F.; Spurr, R.J.D.; Pedergnana, M.; Doicu, A.; Molina García, V.; Schüssler, O. The operational cloud retrieval algorithms from TROPOMI on board Sentinel-5 Precursor. Atmos. Meas. Tech 2018, 11, 409–427. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | GEMS | OMI | TROPOMI | ||
|---|---|---|---|---|---|
| Orbit type | Geosynchronous (nadir at 128°E) | Sun-synchronous mean LST – 13:45) | Sun-synchronous (mean LST – 13:35) | ||
| Spectral range | 300–500 nm | UV-2 | 307–383 nm | Band 3 | 320–405 nm |
| VIS | 349–504 nm | Band 4 | 405–500 nm | ||
| Spectral resolution | < 0.60 nm | UV-2 | 0.42 nm | Band 3 | 0.55 nm |
| VIS | 0.63 nm | Band 4 | |||
| Spectral sampling | < 0.20 nm/pixel | UV-2 | 0.14 nm/pixel | Band 3 | 0.20 nm/pixel |
| VIS | 0.21 nm/pixel | Band 4 | |||
| Spatial resolution | 3.5 8 km2 (at Seoul) | 13 24 km2 (along across track) | 5.5 3.5 km2 (along across track) | ||
| Condition | Threshold |
|---|---|
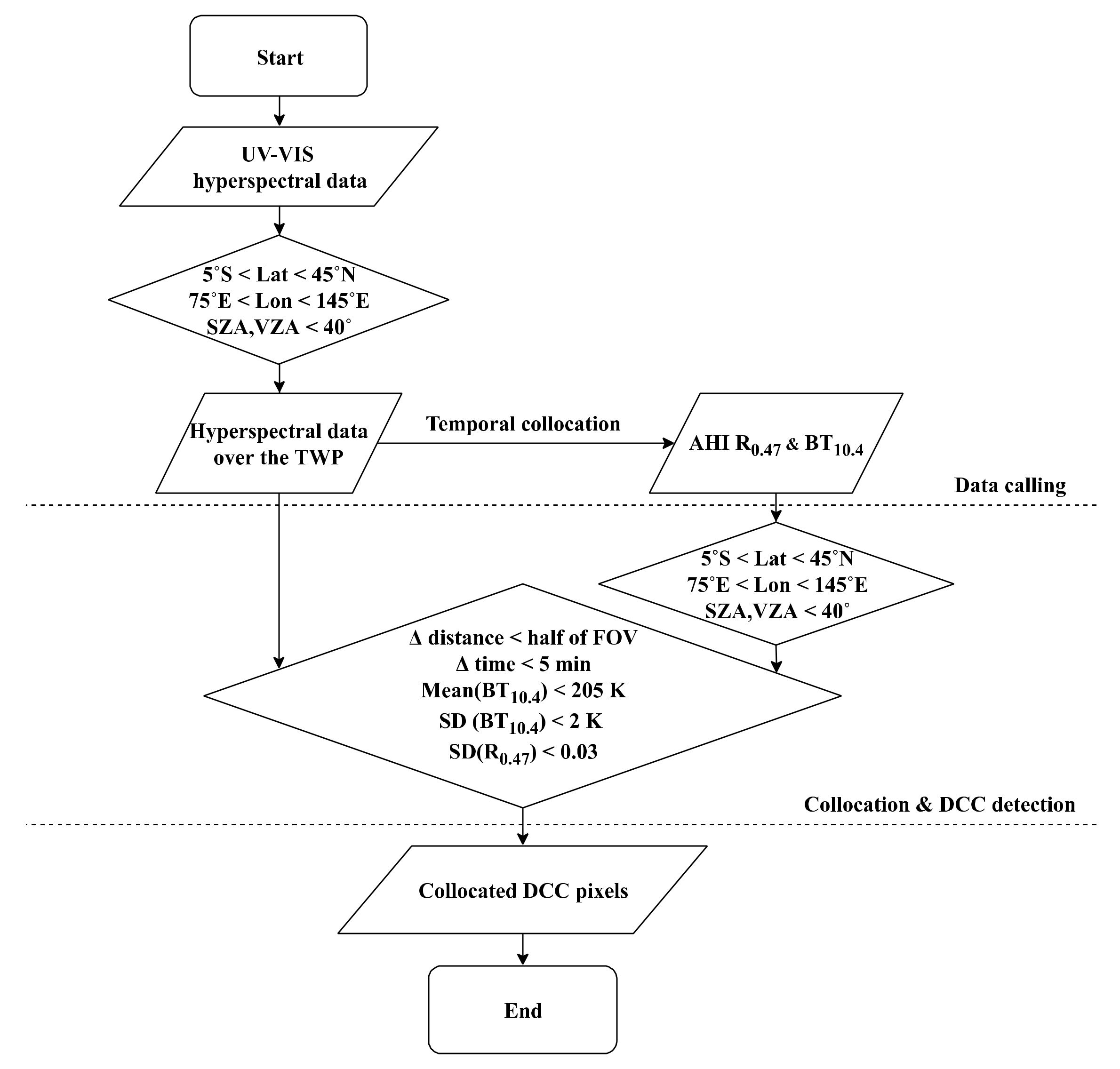
| Infrared brightness temperature (TBIR) | TBIR < 205 K |
| Spatial uniformity (TBIR) | Standard deviation of TBIR < 2 K |
| Spatial uniformity (RVIS) | Standard deviation of RVIS < 0.03 |
| Solar and viewing zenith angle (θ0 and θ) | θ0 < 40°, θ < 40° |
| GEMS observation area | 5°S–45°N, 75°E–145°E |
| AHI | Ch01 (R0.47) | Ch13 (TB10.4) |
|---|---|---|
| Channel | VIS | IR (window channel) |
| Wavelength | 0.47 µm | 10.4 µm |
| Spatial resolution | 1 1 km2 | 2 2 km2 |
| Observation interval | Every 10 min | |
| Spatial coverage | Full-disk scan (nadir at 140.7°E) | |
| AHI R0.47 | w/o | 0.60 | 0.62 | 0.64 | 0.66 | 0.68 | 0.70 | 0.72 | 0.74 | 0.76 |
| Count | 91630 | 90752 | 89861 | 88286 | 86138 | 83569 | 80475 | 76696 | 71469 | 64857 |
| Mean | 0.916 | 0.917 | 0.919 | 0.922 | 0.925 | 0.929 | 0.933 | 0.938 | 0.943 | 0.949 |
| Median | 0.932 | 0.933 | 0.934 | 0.936 | 0.938 | 0.940 | 0.943 | 0.946 | 0.951 | 0.956 |
| Mode* | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 |
| SD* | 0.076 | 0.074 | 0.072 | 0.070 | 0.067 | 0.063 | 0.060 | 0.057 | 0.053 | 0.050 |
| Skewness | −0.779 | −0.769 | −0.765 | −0.761 | −0.767 | −0.780 | −0.803 | −0.848 | −0.917 | −1.021 |
| Kurtosis | -0.027 | -0.008 | 0.029 | 0.110 | 0.255 | 0.448 | 0.706 | 1.056 | 1.570 | 2.225 |
| SD* of AHI R0.47 | w/o | 0.025 | 0.024 | 0.023 | 0.022 | 0.021 | 0.020 | 0.019 | 0.018 | 0.017 |
| Count | 91630 | 84159 | 82454 | 80629 | 78626 | 76557 | 74241 | 71737 | 69135 | 66243 |
| Mean | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 | 0.916 |
| Median | 0.932 | 0.933 | 0.933 | 0.933 | 0.933 | 0.933 | 0.933 | 0.932 | 0.932 | 0.932 |
| Mode* | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 | 0.960 |
| SD* | 0.076 | 0.075 | 0.075 | 0.075 | 0.074 | 0.074 | 0.074 | 0.074 | 0.074 | 0.074 |
| Skewness | −0.779 | −0.788 | −0.789 | −0.792 | −0.793 | −0.795 | −0.797 | −0.796 | −0.795 | −0.797 |
| Kurtosis | −0.027 | −0.002 | 0.006 | 0.012 | 0.017 | 0.019 | 0.026 | 0.025 | 0.023 | 0.026 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.; Ahn, M.-H.; Kang, M. The New Potential of Deep Convective Clouds as a Calibration Target for a Geostationary UV/VIS Hyperspectral Spectrometer. Remote Sens. 2020, 12, 446. https://doi.org/10.3390/rs12030446
Lee Y, Ahn M-H, Kang M. The New Potential of Deep Convective Clouds as a Calibration Target for a Geostationary UV/VIS Hyperspectral Spectrometer. Remote Sensing. 2020; 12(3):446. https://doi.org/10.3390/rs12030446
Chicago/Turabian StyleLee, Yeeun, Myoung-Hwan Ahn, and Mina Kang. 2020. "The New Potential of Deep Convective Clouds as a Calibration Target for a Geostationary UV/VIS Hyperspectral Spectrometer" Remote Sensing 12, no. 3: 446. https://doi.org/10.3390/rs12030446
APA StyleLee, Y., Ahn, M.-H., & Kang, M. (2020). The New Potential of Deep Convective Clouds as a Calibration Target for a Geostationary UV/VIS Hyperspectral Spectrometer. Remote Sensing, 12(3), 446. https://doi.org/10.3390/rs12030446