An Efficient Ground Manoeuvring Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation

 ,
,
Abstract
1. Introduction
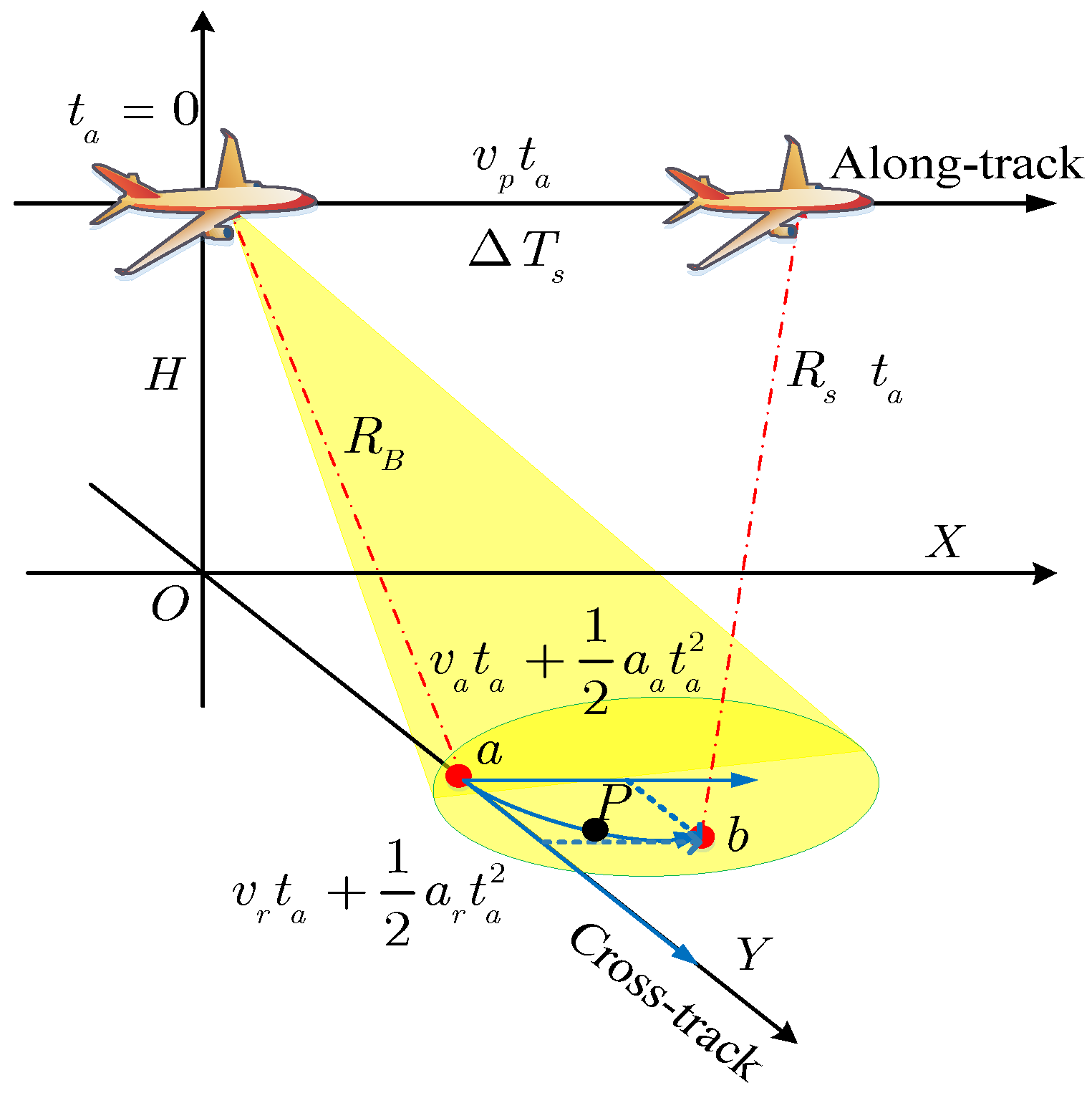
2. Geometric and Signal Model for Ground Manoeuvring Target
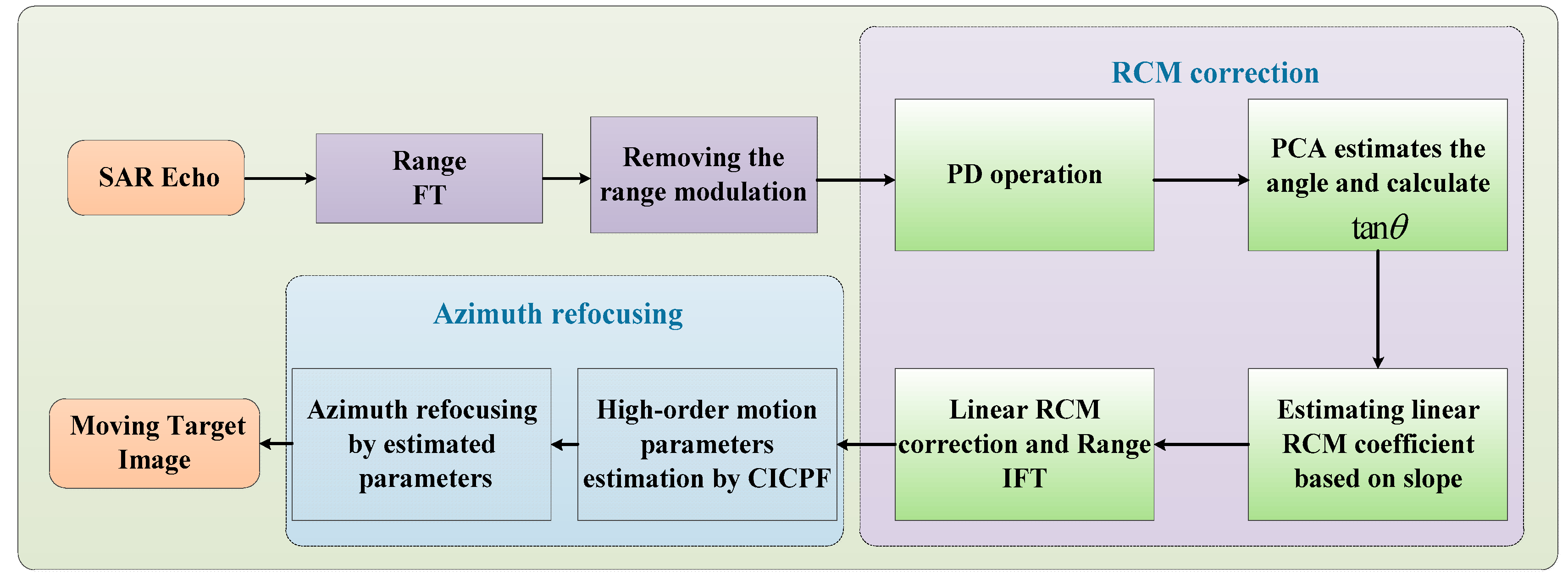
3. Description of the Proposed Method
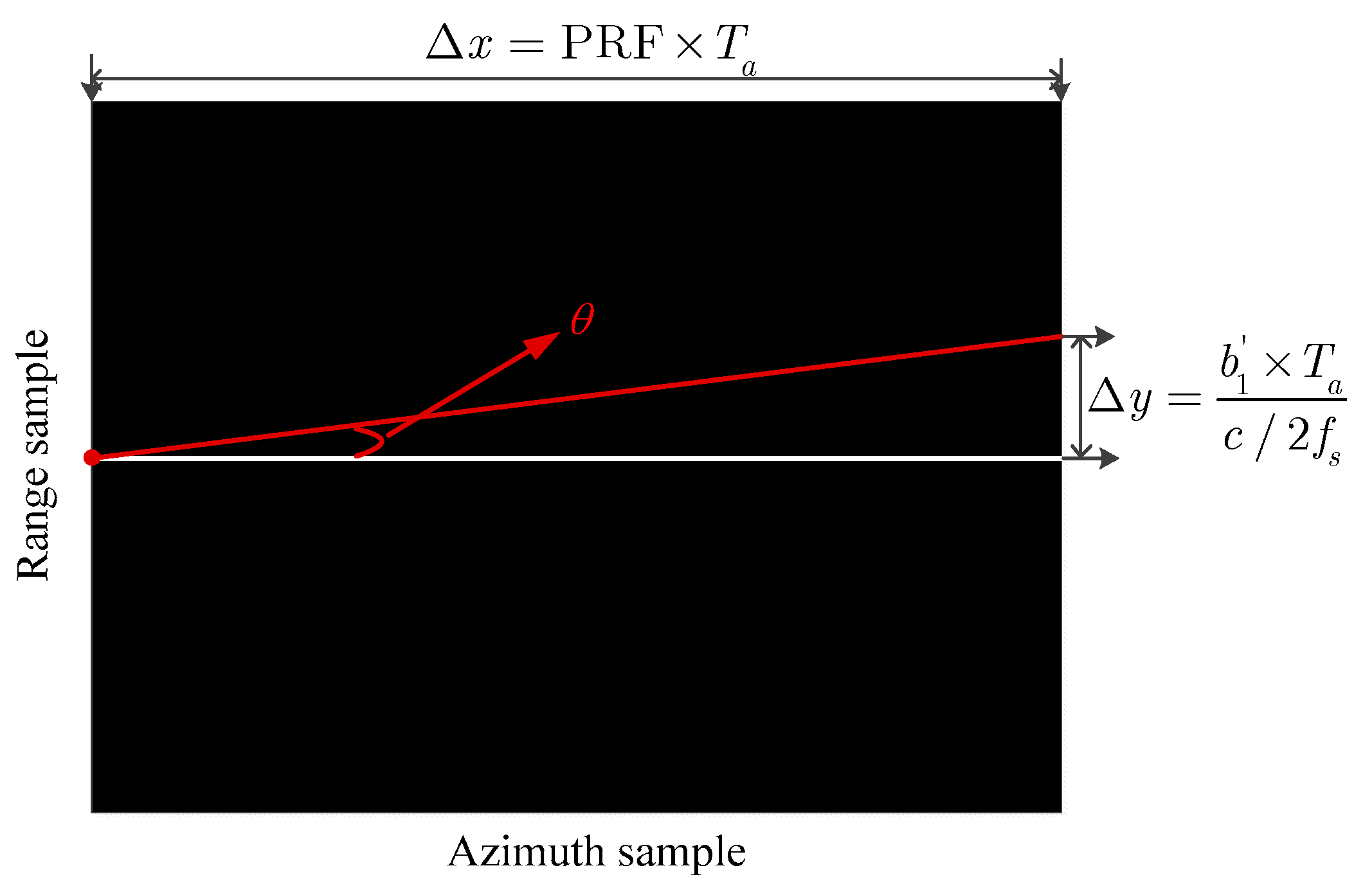
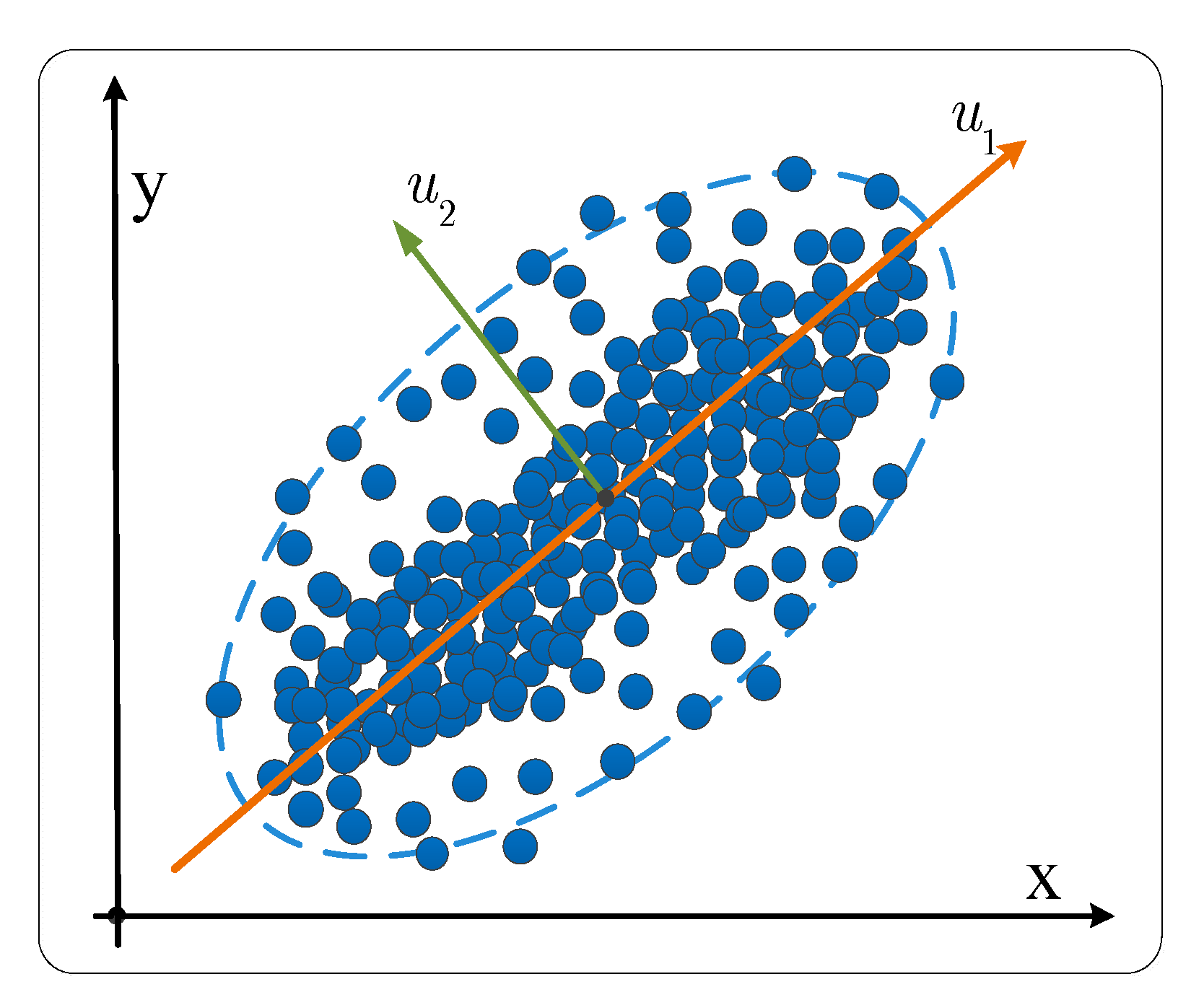
3.1. RCM Correction
3.2. Motion Parameter Estimation Using CICPF
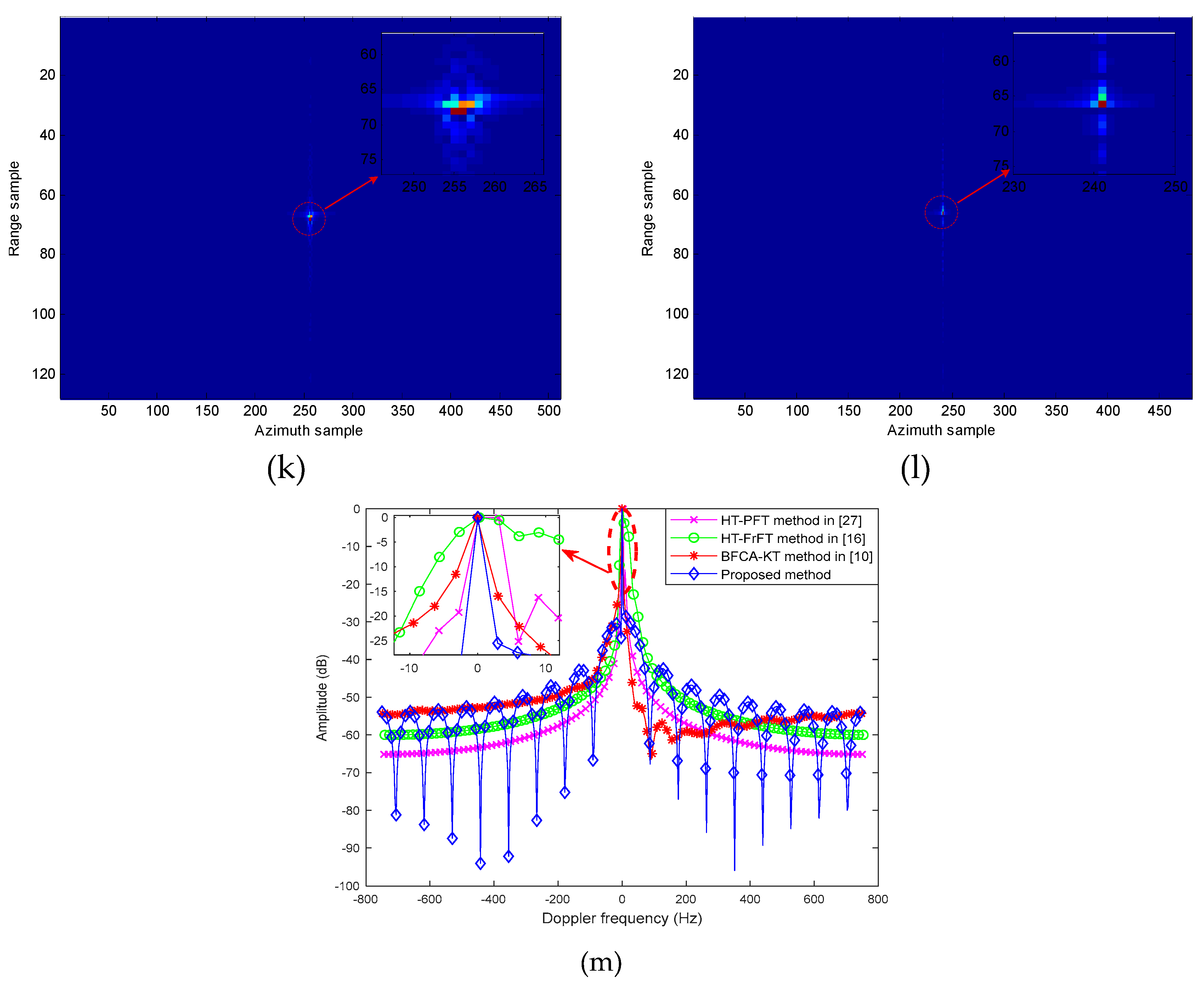
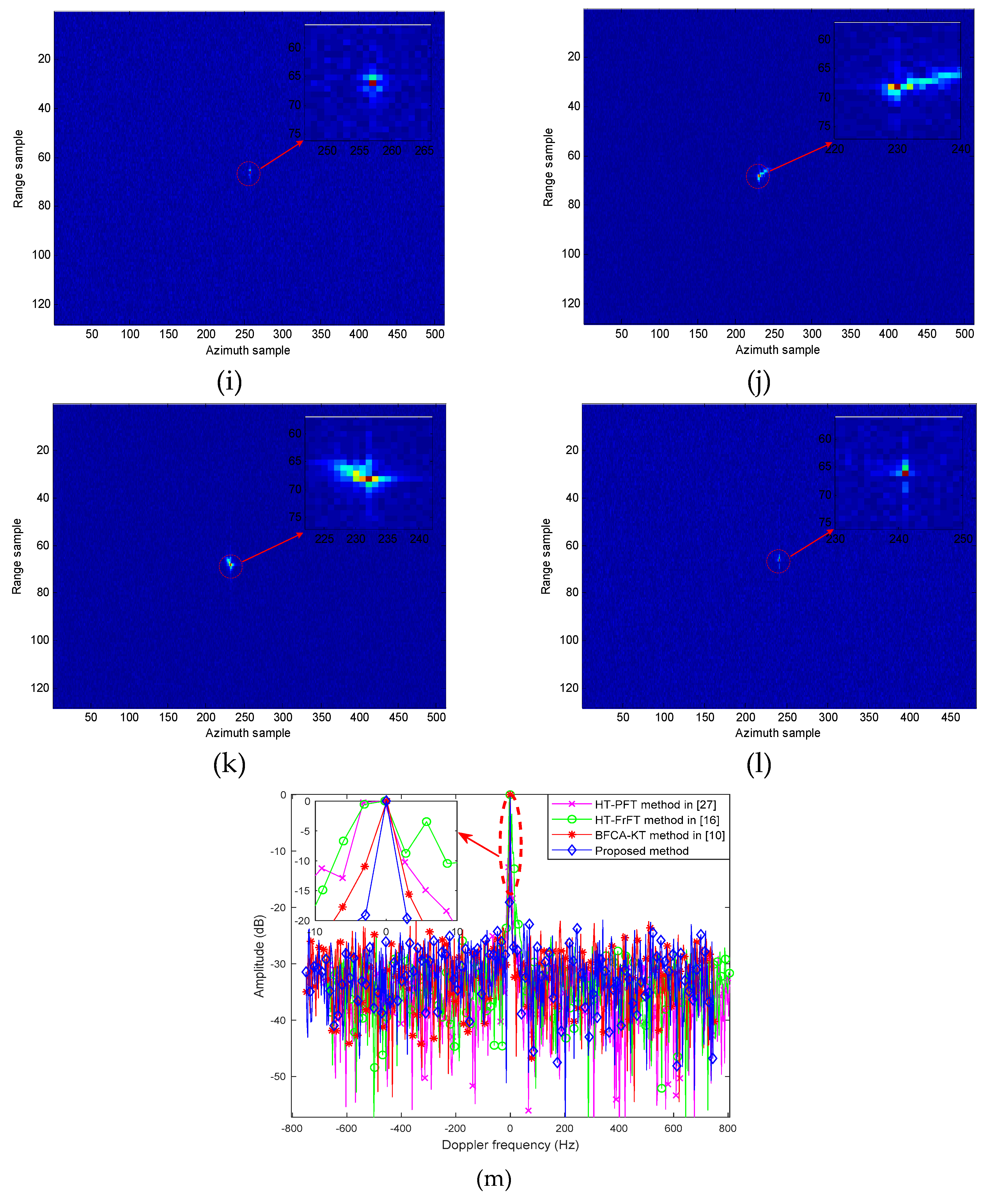
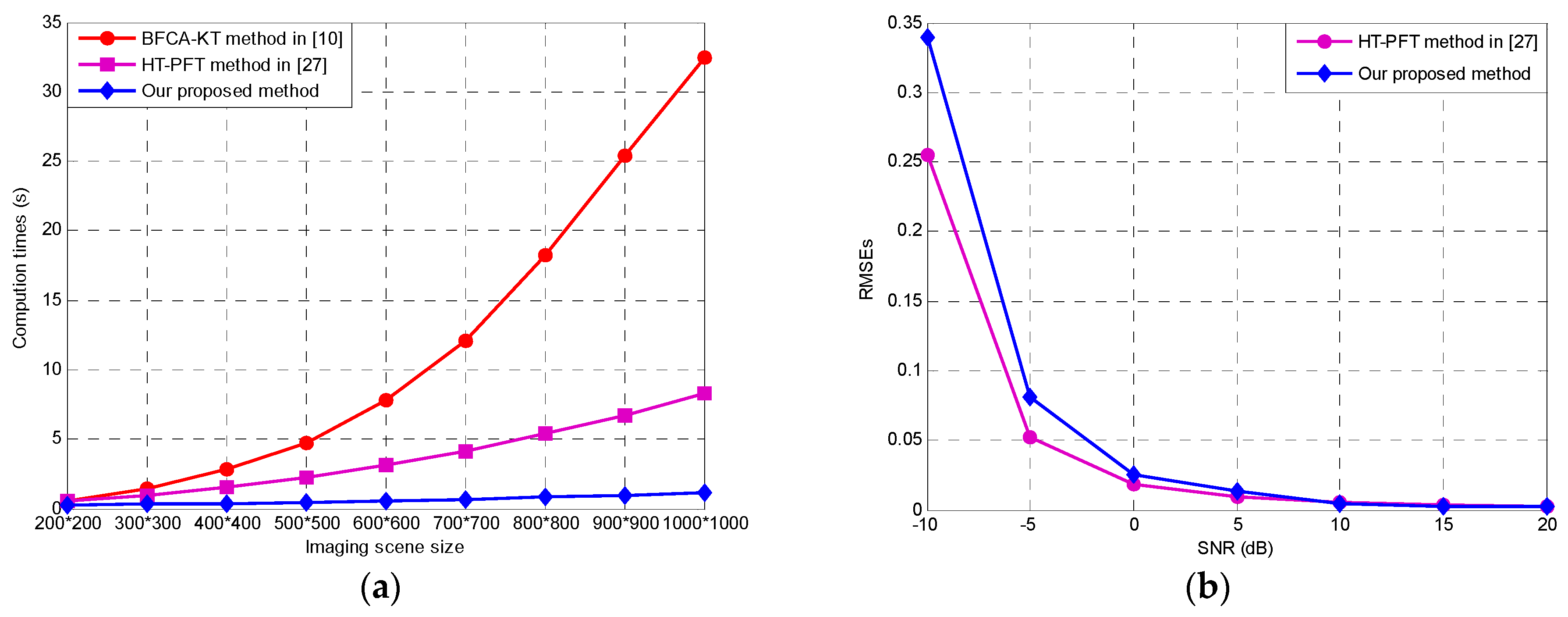
4. Experimental Results and Analysis
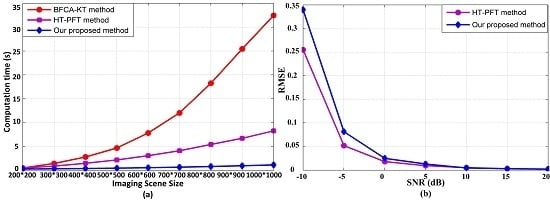
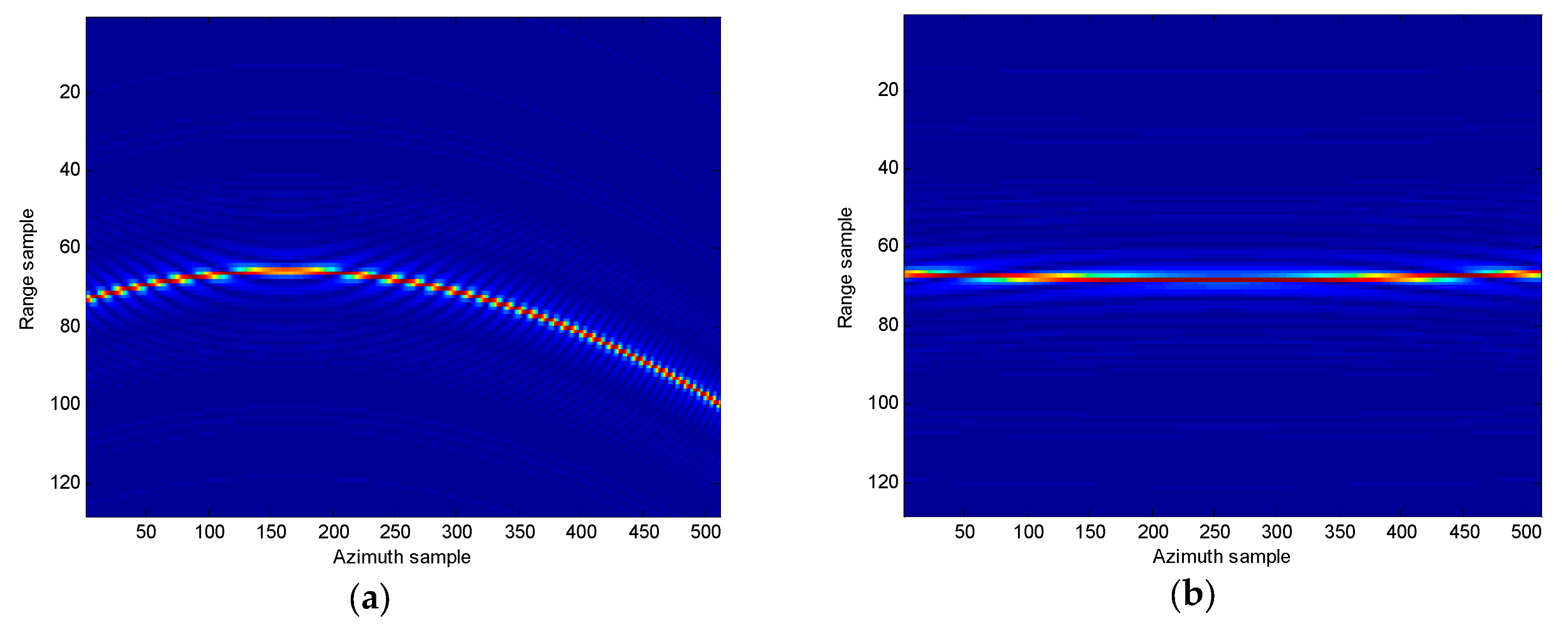
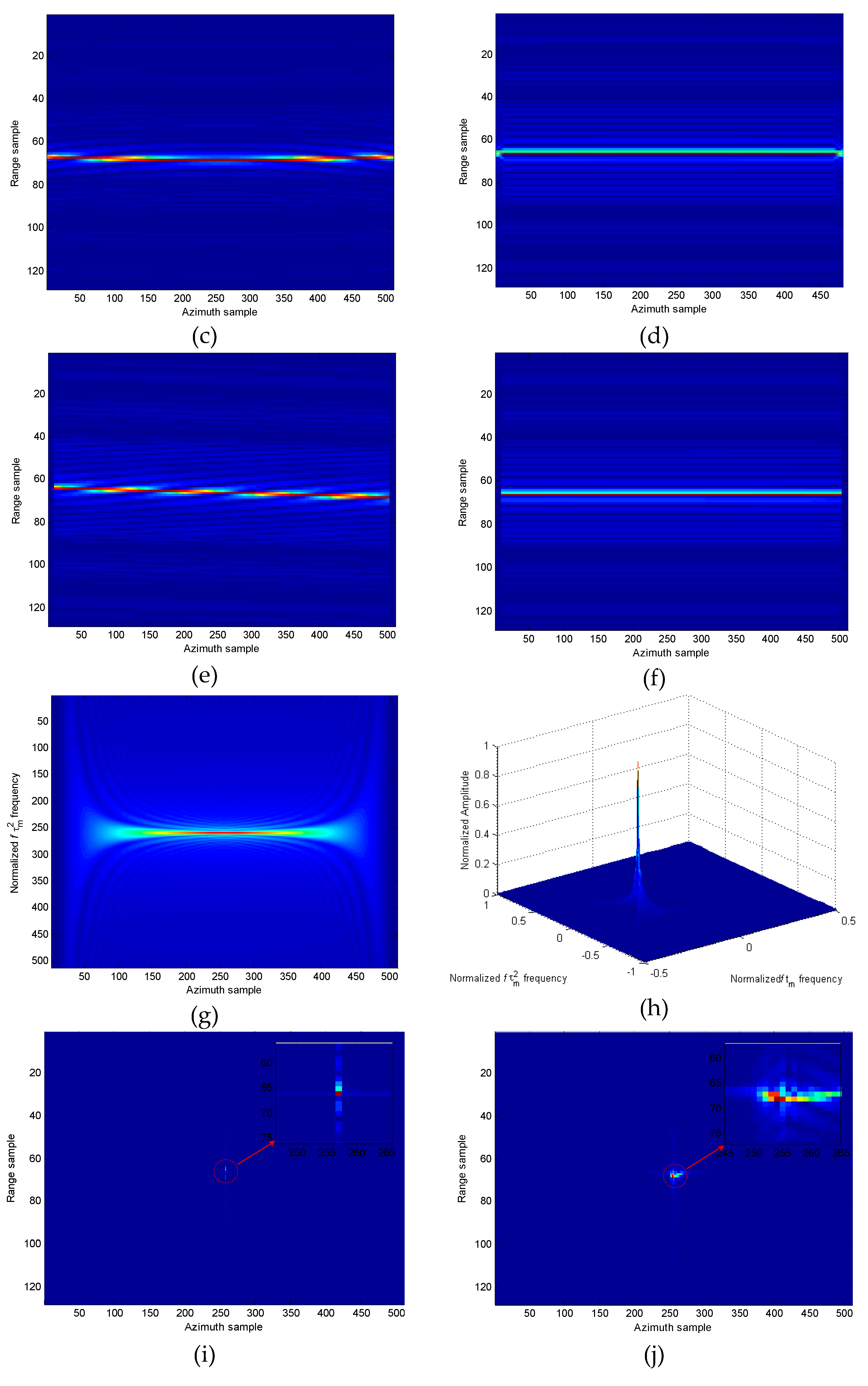
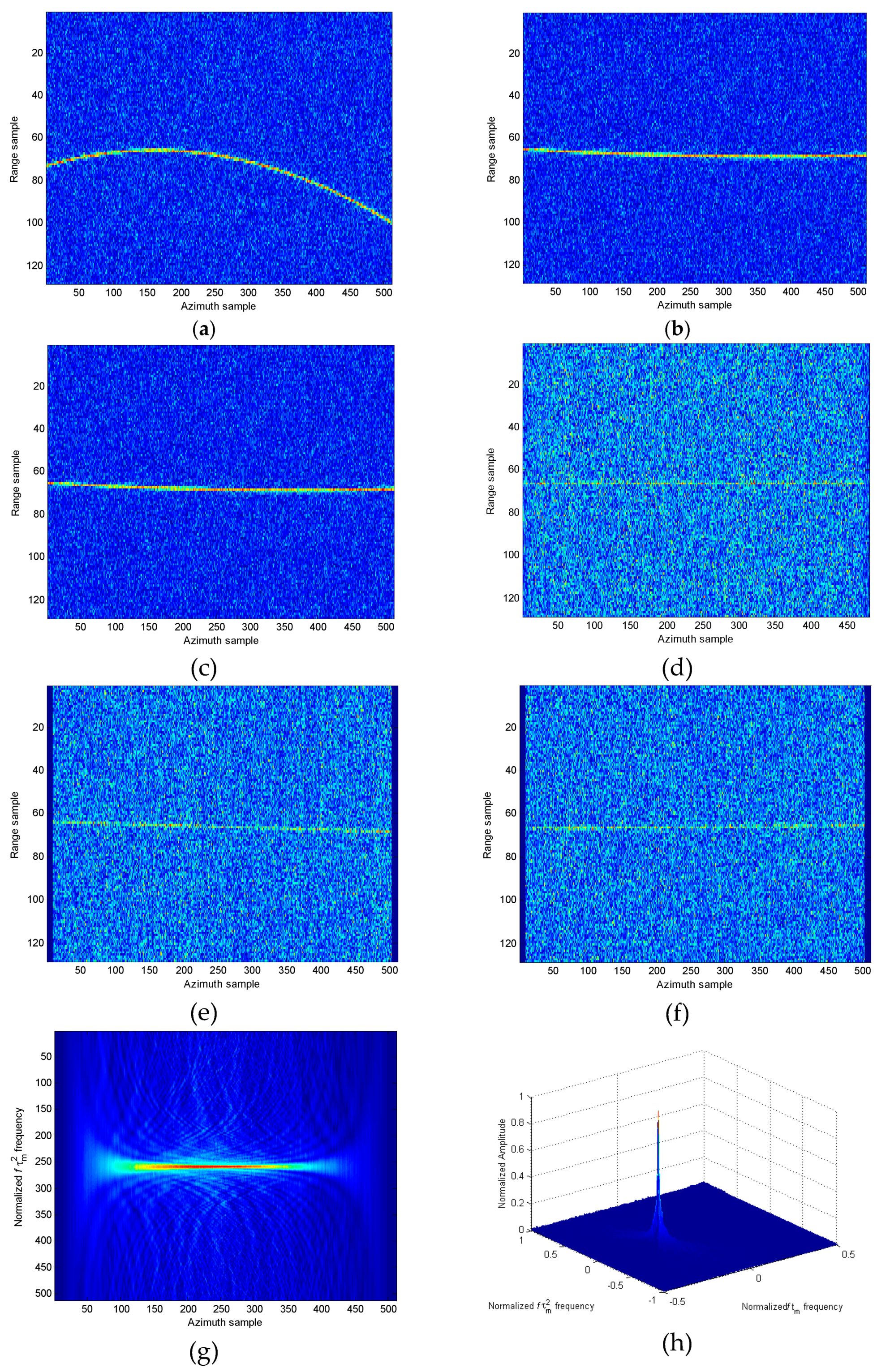
4.1. Simulation Results and Analysis
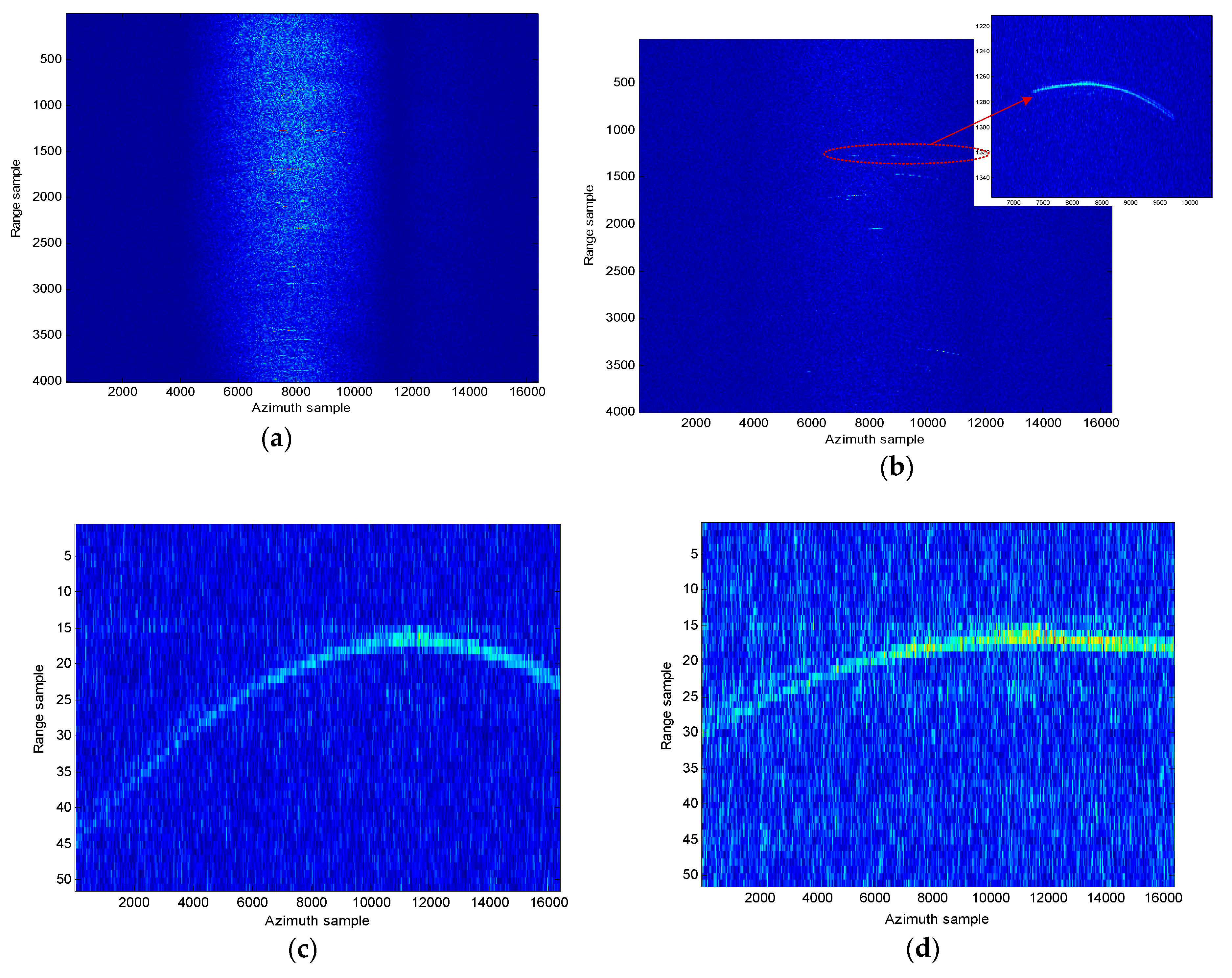
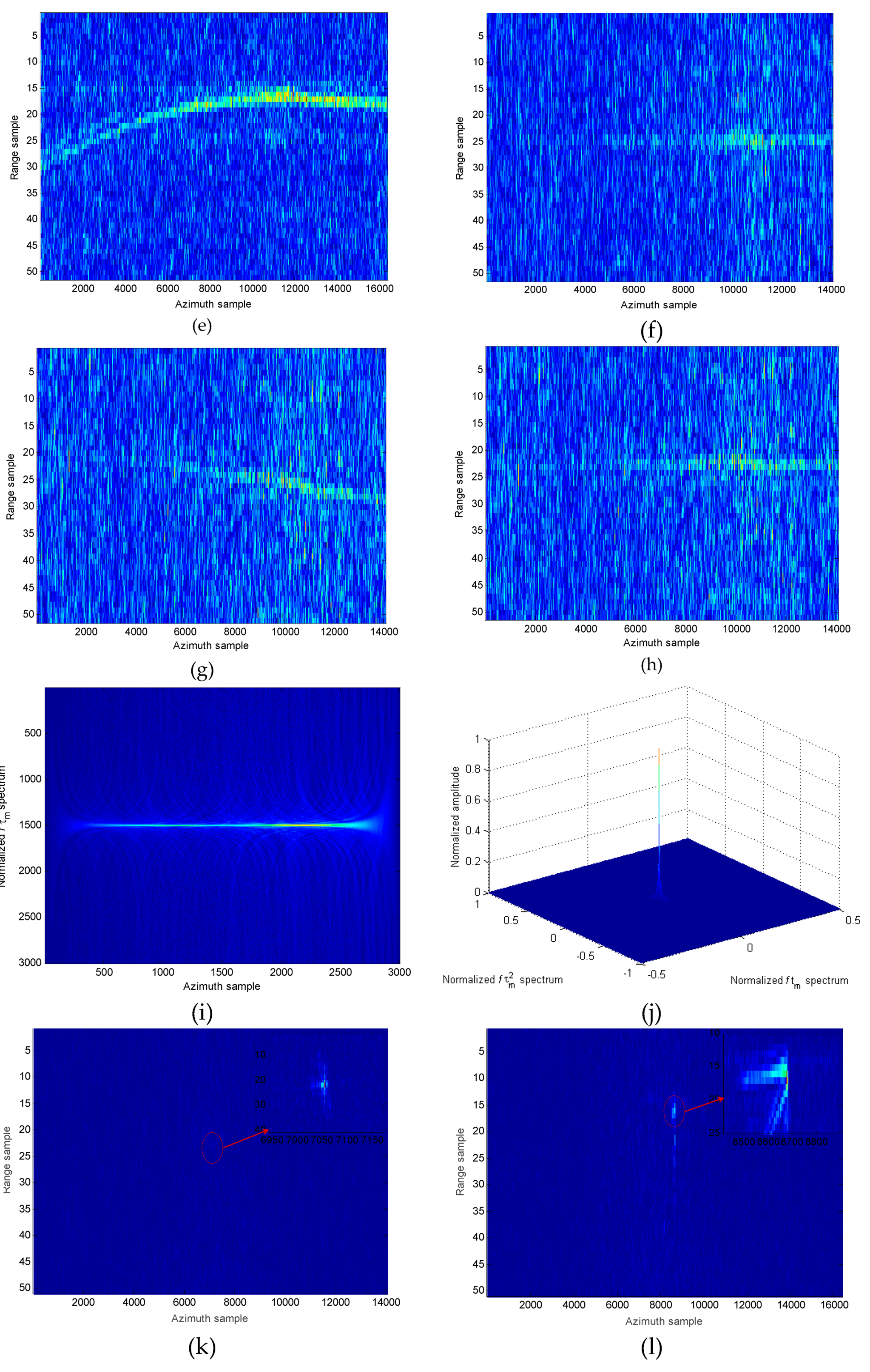
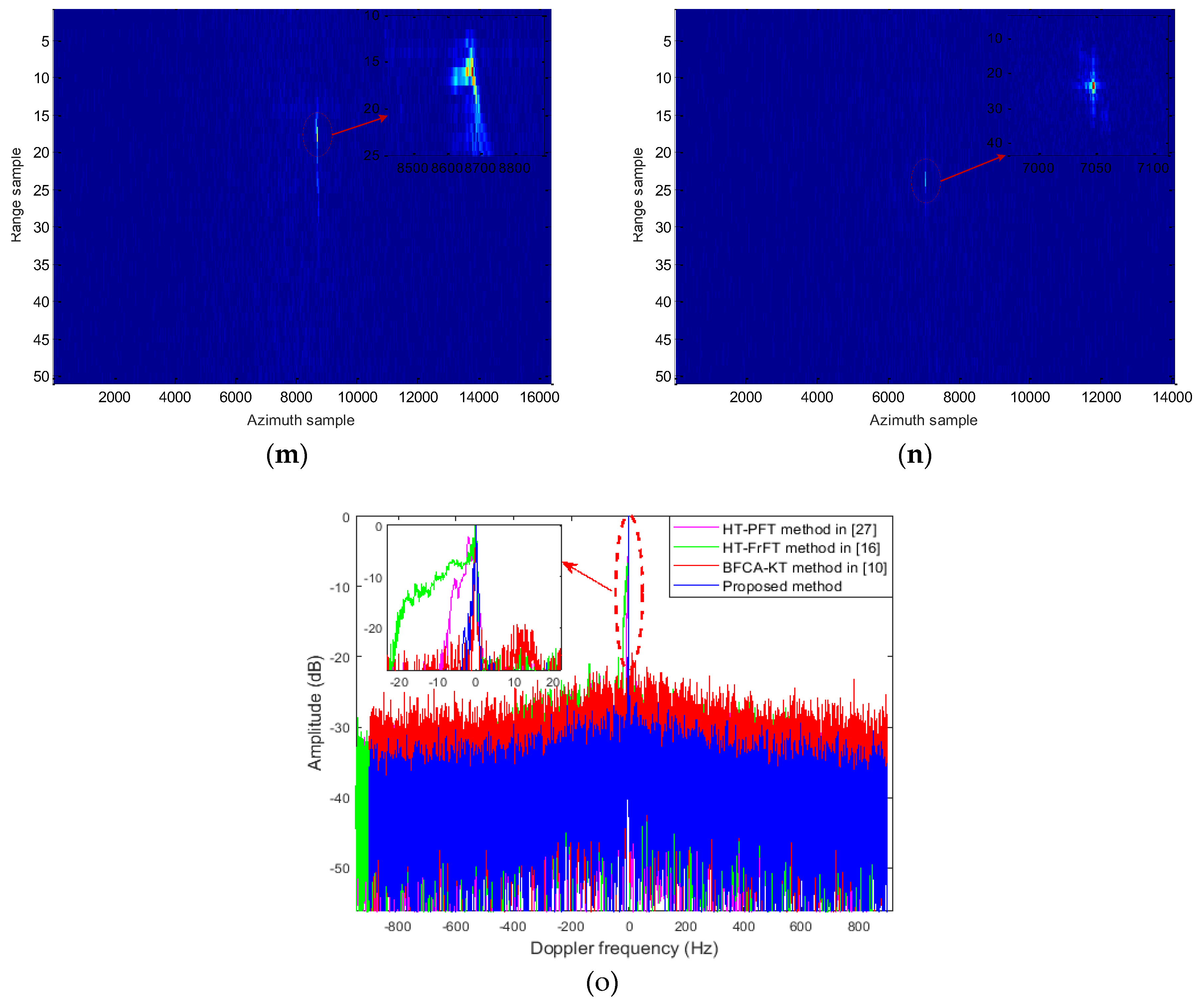
4.2. Measured Data Results and Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wong, F.H.; Yeo, T.S. New application of nonlinear chirp scaling in SAR data processing. IEEE Trans. Geosci. Remote Sens. 2001, 39, 946–953. [Google Scholar] [CrossRef]
- Kim, A.J.; Dogan, S.; Fisher, J.W.; Moses, R.L.; Willsky, A.S. Attributing scatterer anisotropy for model-based ATR. In Algorithms for Synthetic Aperture Radar Imagery VII; International Society for Optics and Photonics: Bellingham, WA, USA, 2000; Volume 4053, pp. 176–189. [Google Scholar]
- Sadjadi, F.A. New experiments in inverse synthetic aperture radar image exploitation for maritime surveillance. In Automatic Target Recognition XXIV; SPIE Defense + Security: Baltimore, MD, USA, 2014. [Google Scholar]
- Noviello, C.; Fornaro, G.; Martorella, M. Focused SAR image formation of moving targets based on Doppler parameter estimation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3460–3470. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Huang, Y.; Sun, Z.; Yang, J. Ground-moving target imaging and velocity estimation based on mismatched compression for bistatic forward-looking SAR. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3277–3291. [Google Scholar] [CrossRef]
- Tian, J.; Cui, W.; Xia, X.; Wu, S. Parameter estimation of ground moving targets based on SKT-DLVT processing. IEEE Trans. Comput. Imaging 2016, 2, 13–26. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.; Ma, J.; Zhang, X. A fast SAR imaging method for ground moving target using a second-order WVD transform. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1940–1956. [Google Scholar] [CrossRef]
- Zhu, D.; Li, Y.; Zhu, Z. A keystone transform without interpolation for SAR ground moving-target imaging. IEEE Trans. Geosci. Remote Sens. Lett. 2007, 4, 18–22. [Google Scholar] [CrossRef]
- Huang, P.; Xia, X.; Liao, G.; Yang, Z. Ground Moving Target Imaging Based on Keystone Transform and Coherently Integrated CPF With a Single-Channel SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5686–5694. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Kirkland, D. Imaging moving targets using the second-order keystone transform. IET Radar Sonar Navig. 2011, 5, 902–910. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.; Peng, Y. Doppler keystone transform: An approach suitable for parallel implementation of SAR moving target imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.; Xia, X. Radon–Fourier transform for radar target detection, I: Generalized Doppler filter bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Wang, Y. Detection and imaging of ground moving targets with real SAR data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 920–932. [Google Scholar] [CrossRef]
- Li, W.; Wang, X.; Wang, G. Scaled Radon-Wigner transform imaging and scaling of maneuvering target. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2043–2051. [Google Scholar] [CrossRef]
- Raihan, S.M.; Abeysekera, S.S. Efficient wideband signal parameter estimation using a radon-ambiguity transform slice. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 673–688. [Google Scholar]
- Zhu, S.; Liao, G.; Qu, Y.; Zhou, Z.; Liu, X. Ground moving targets imaging algorithm for synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 462–477. [Google Scholar] [CrossRef]
- Zhang, X.; Liao, G.; Zhu, S.; Zeng, C.; Shu, Y. Geometry-information-aided efficient radial velocity estimation for moving target imaging and location based on Radon transform. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1105–1117. [Google Scholar] [CrossRef]
- Lv, G.; Li, Y.; Wang, G.; Zhang, Y. Ground moving target indication in SAR images with symmetric Doppler views. IEEE Trans. Geosci. Remote Sens. 2016, 54, 533–543. [Google Scholar] [CrossRef]
- Chen, V.; Ling, H. Joint time-frequency analysis for radar signal and image processing. IEEE Signal Process. Mag. 1999, 16, 81–93. [Google Scholar] [CrossRef]
- Kersten, P.R.; Jansen, R.W.; Luc, K.; Ainsworth, T.L. Motion analysis in SAR images of unfocused objects using time-frequency methods. IEEE Geosci. Remote Sens. Lett. 2007, 4, 527–531. [Google Scholar] [CrossRef]
- Jeong-Won, P.; Joong-Sun, W. An efficient method of Doppler parameter estimation in the time-frequency domain for a moving object from TerraSAR-X data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4771–4787. [Google Scholar] [CrossRef]
- Porat, B.; Benjamin, F. Asymptotic statistical analysis of the high-order ambiguity function for parameter estimation of polynomial-phase signals. IEEE Trans. Inf. Theory 1996, 42, 995–1001. [Google Scholar] [CrossRef]
- Barbarossa, S.; Di Lorenzo, P.; Vecchiarelli, P. Parameter estimation of 2D multi-component polynomial phase signals: An application to SAR imaging of moving targets. IEEE Trans. Signal Process. 2014, 62, 4375–4389. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Wang, Y. Imaging and parameter estimation of fast-moving targets with single-antenna SAR. IEEE Trans. Geosci. Remote Sens. 2014, 11, 529–533. [Google Scholar] [CrossRef]
- Sharma, J.; Gierull, C.H.; Collins, M.J. Compensating the effects of target acceleration in dual-channel SAR-GMTI. IEE Proc. Radar Sonar Navig. 2006, 153, 53–62. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.; Ma, J. Ground maneuvering target imaging and high-order motion parameter estimation based on second-order Keystone and generalized Hough-HAF transform. IEEE Trans. Geosci. Remote Sens. 2017, 55, 320–335. [Google Scholar] [CrossRef]
- Xu, J.; Xia, X.; Peng, S.; Yu, J.; Peng, Y.; Qian, L. Radar maneuvering target motion estimation based on generalized Radon–Fourier transform. IEEE Trans. Signal Process. 2012, 60, 6190–6201. [Google Scholar]
- Kong, L.; Li, X.; Cui, G.; Yi, W.; Yang, Y. Coherent integration algorithm for a maneuvering target with high-order range migration. IEEE Trans. Signal Process. 2015, 63, 4474–4486. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y. An airborne SAR moving target imaging and motion parameters estimation algorithm with azimuth-dechirping and the second-order Keystone transform applied. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3967–3976. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y.; Kang, X. A Doppler ambiguity tolerated algorithm for airborne SAR ground moving target imaging and motion parameters estimation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2398–2402. [Google Scholar] [CrossRef]
- Li, D.; Zhan, M.; Liu, H.; Liao, Y.; Liao, G. A Robust Translational Motion Compensation Method for ISAR Imaging Based on Keystone Transform and Fractional Fourier Transform Under Low SNR Environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2140–2156. [Google Scholar] [CrossRef]
- Barbarossa, S.; Scaglione, A.; Giannakis, G.B. Product high-order ambiguity function for multicomponent polynomial-phase signal modeling. IEEE Trans. Signal Process. 1998, 46, 691–708. [Google Scholar] [CrossRef]
- Li, X.; Liu, G.; Ni, J. Autofocusing of ISAR images based on entropy-minimization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1240–1252. [Google Scholar] [CrossRef]
- Kang, J.; Kang, B.; Kim, K. ISAR cross-range scaling using iterative processing via principal component analysis and bisection algorithm. IEEE Trans. Signal Process. 2016, 64, 3909–3918. [Google Scholar] [CrossRef]
- Partridge, M.; Calvo, R.A. Fast dimensionality reduction and simple PCA. Intell. Data Anal. 1998, 2, 203–214. [Google Scholar] [CrossRef]
- O’Shea, P. A fast algorithm for estimating the parameters of a quadratic FM signal. IEEE Trans. Signal Process. 2004, 52, 385–393. [Google Scholar] [CrossRef]
- Wang, P.; Yang, J. Multicomponent chirp signals analysis using product cubic phase function. Dig. Signal Process. 2006, 16, 654–669. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Djurovic, I.; Himed, B. Integrated cubic phase function for linear FM signal analysis. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 963–977. [Google Scholar] [CrossRef]
- Li, D.; Zhan, M.; Su, J.; Liu, H.; Zhang, X.; Liao, G. Performances analysis of coherently integrated CPF for LFM signal under low SNR and its application to ground moving target imaging. IEEE Geosci. Remote Sens. 2017, 55, 6402–6419. [Google Scholar] [CrossRef]
- Xu, G.; Gao, Y.; Li, J.; Xing, M. A Review on InSAR Phase Denoising. IEEE Geosci. Remote Sens. Mag. 2019. [Google Scholar] [CrossRef]
- Li, D.; Gui, X.; Liu, H.; Su, J.; Xiong, H. An ISAR Imaging Algorithm for Maneuvering Targets With Low SNR Based on Parameter Estimation of Multicomponent Quadratic FM Signals and Nonuniform FFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 12, 5688–5702. [Google Scholar] [CrossRef]
- DiPietro, R.C. Extended factored space-time processing for airborne radar systems. In Proceedings of the of the Twenty-Sixth Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 26–28 October 1992; pp. 425–430. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 10 GHz |
| Nearest slant range | 400 m |
| Range bandwidth | 1 GHz |
| Pulse repetition frequency | 1500 Hz |
| SAR platform velocity | 200 m/s |
| Along-track velocity | 10 m/s |
| Cross-track velocity | 6 m/s |
| Along-track acceleration | |
| Cross-track acceleration |
| Parameter | Value |
|---|---|
| Carrier frequency | 5.4 GHz |
| Range bandwidth | 210 MHz |
| Range sampling frequency | 267 MHz |
| Pulse repetition frequency | 1800 Hz |
| Pulse duration time | 10 µs |
| SAR platform velocity | 130 m/s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Ma, H.; Liu, H.; Chen, Z.; Su, J.; Zhou, X.; Li, W.; Yang, Z. An Efficient Ground Manoeuvring Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation. Remote Sens. 2020, 12, 378. https://doi.org/10.3390/rs12030378
Li D, Ma H, Liu H, Chen Z, Su J, Zhou X, Li W, Yang Z. An Efficient Ground Manoeuvring Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation. Remote Sensing. 2020; 12(3):378. https://doi.org/10.3390/rs12030378
Chicago/Turabian StyleLi, Dong, Haining Ma, Hongqing Liu, Zhanye Chen, Jia Su, Xichuan Zhou, Wei Li, and Zhijun Yang. 2020. "An Efficient Ground Manoeuvring Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation" Remote Sensing 12, no. 3: 378. https://doi.org/10.3390/rs12030378
APA StyleLi, D., Ma, H., Liu, H., Chen, Z., Su, J., Zhou, X., Li, W., & Yang, Z. (2020). An Efficient Ground Manoeuvring Target Refocusing Method Based on Principal Component Analysis and Motion Parameter Estimation. Remote Sensing, 12(3), 378. https://doi.org/10.3390/rs12030378