Understanding Ku-Band Ocean Radar Backscatter at Low Incidence Angles under Weak to Severe Wind Conditions by Comparison of Measurements and Models

Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Data and Collocation
2.1.1. Satellite Data
2.1.2. Buoy Winds
2.1.3. SFMR Wind Speeds
2.1.4. H*Wind Data
2.2. Scattering Models
2.3. Wave Spectrum
3. Results
3.1. Comparison of the PO Model with Measurements
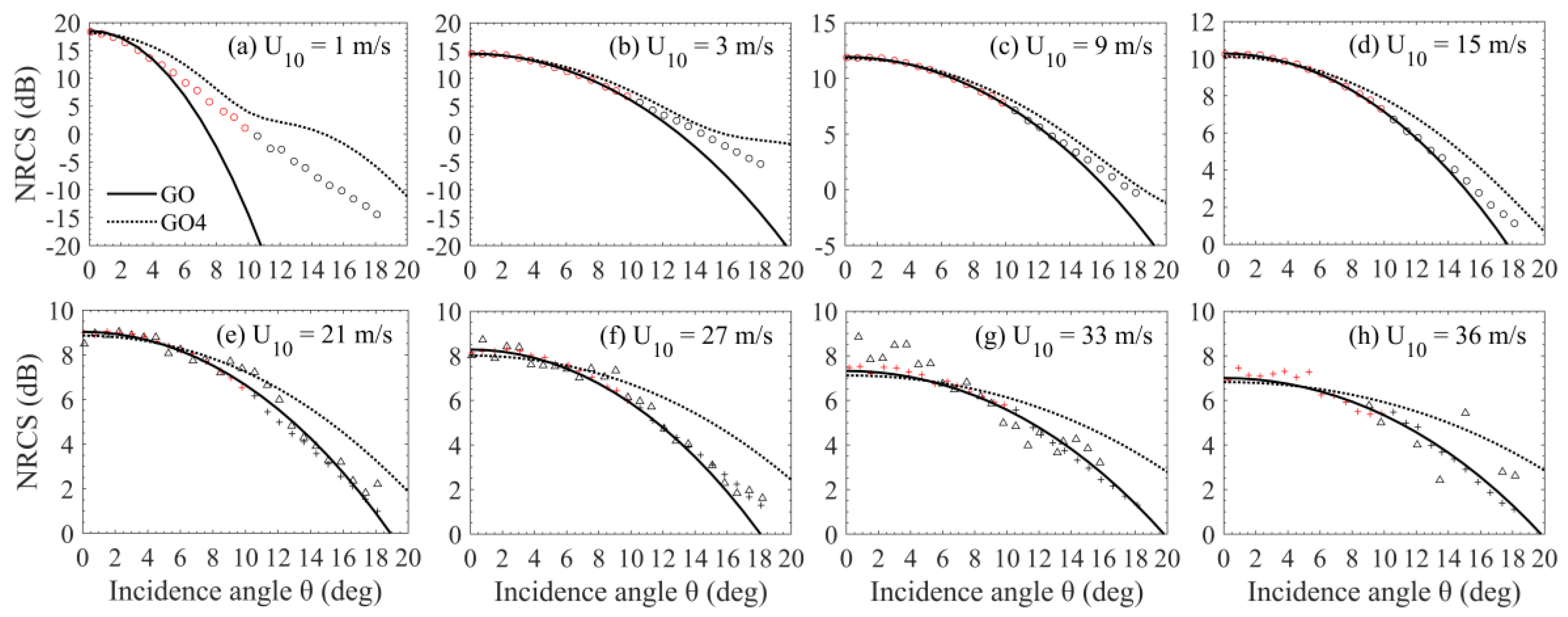
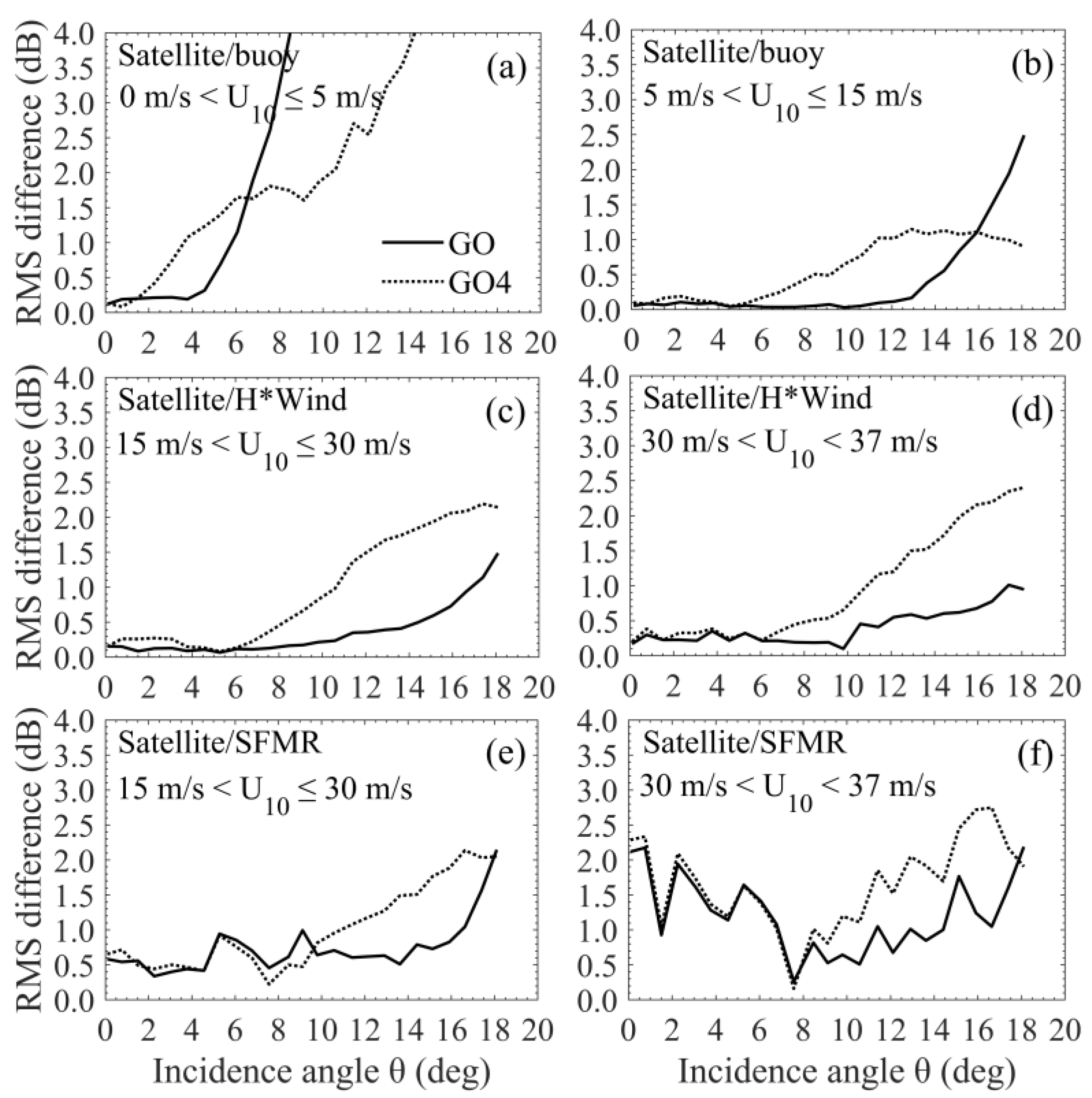
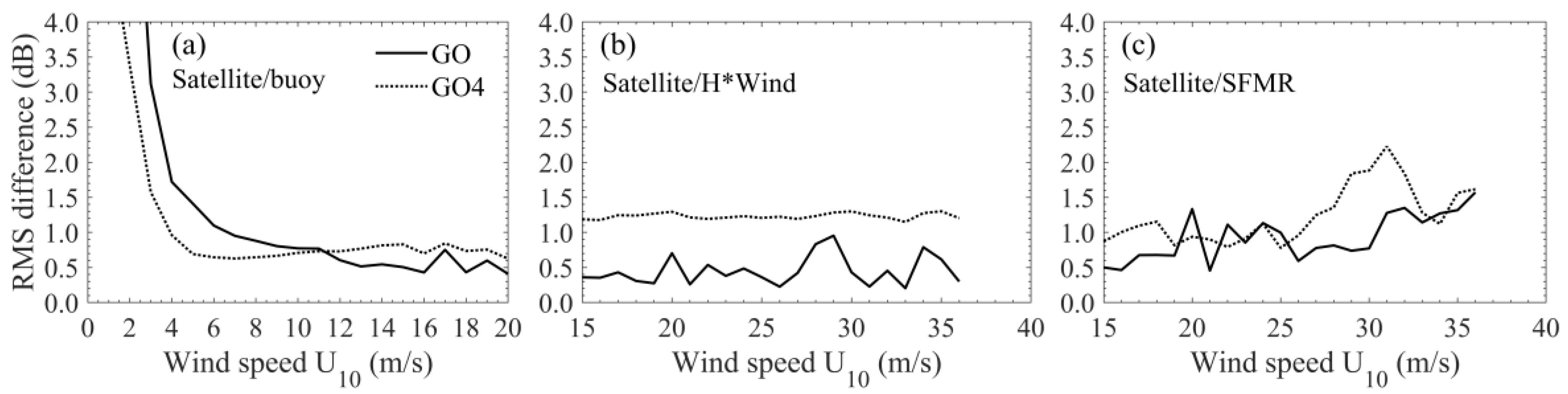
3.2. Comparison with GO and GO4 Models
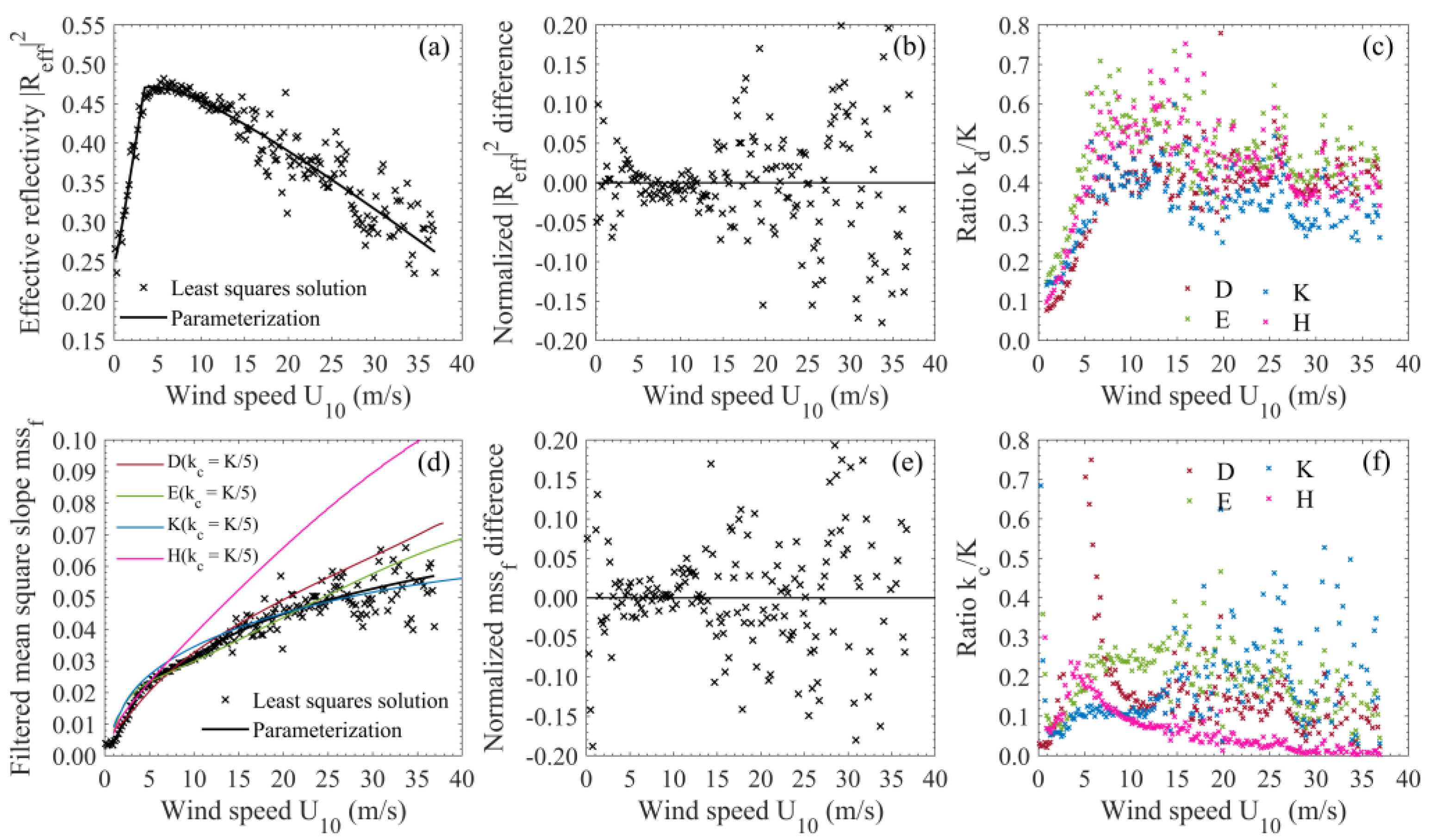
3.3. Further Analysis on the Imapct of Wave Breaking
4. Discussion
4.1. Impact of Sea State on NRCS
4.2. Impact of Sea State on Radar-Estimated Parameters
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hauser, D.; Tison, C.; Amiot, T.; Delaye, L.; Corcoral, N.; Castillan, P. SWIM: The first spaceborne wave scatterometer. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3000–3014. [Google Scholar] [CrossRef]
- Abdalla, S. Ku-band radar altimeter surface wind speed algorithm. Mar. Geod. 2012, 35, 276–298. [Google Scholar] [CrossRef]
- Yang, J.; Ren, L.; Wang, J.; Zheng, G.; Li, X. Preliminary retrieval of ocean winds and waves from Chinese newly launched spaceborne microwave sensors. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Valenzuela, G. Theories for the interaction of electromagnetic and oceanic waves—A review. Bound. Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Barrick, D. Rough surface scattering based on the specular point theory. IEEE Trans. Antennas Propagat. 1968, 16, 449–454. [Google Scholar] [CrossRef]
- Brown, G. Quasi-specular scattering from the air-sea interface. In Surface Waves and Fluxes; Springer: Dordrecht, The Netherlands, 1990; pp. 1–39. [Google Scholar]
- Boisot, O.; Nouguier, F.; Chapron, B.; Guérin, C. The GO4 model in near-nadir microwave scattering from the sea surface. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5889–5900. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Guérin, C. A critical survey of approximate scattering wave theories from random rough surfaces. Waves Random Media 2004, 14, R1–R40. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Brown, G. Backscattering from a Gaussian-distributed perfectly conducting rough surface. IEEE Trans. Antennas Propagat. 1978, 26, 472–482. [Google Scholar] [CrossRef]
- Freilich, M.; Vanhoff, B. The relationship between winds, surface roughness, and radar backscatter at low incidence angles from TRMM precipitation radar measurements. J. Atmos. Ocean. Technol. 2003, 20, 549–562. [Google Scholar] [CrossRef]
- Thompson, D.; Elfouhaily, T.; Garrison, J. An improved geometrical optics model for bistatic GPS scattering from the ocean surface. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2810–2821. [Google Scholar] [CrossRef]
- Bringer, A.; Guérin, C.; Chapron, B.; Mouche, A. Peakedness effects in near-nadir radar observations of the sea surface. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3293–3301. [Google Scholar] [CrossRef]
- Hauser, D.; Caudal, G.; Guimbard, S.; Mouche, A. A study of the slope probability density function of the ocean waves from radar observations. J. Geophys. Res. Ocean. 2008, 113, 710–713. [Google Scholar] [CrossRef]
- Boisot, O.; Pioch, S.; Fatras, C.; Caulliez, G.; Bringer, A.; Borderies, P.; Lalaurie, J.; Guérin, C. Ka-band backscattering from water surface at small incidence: A wind-wave tank study. J. Geophys. Res. Ocean. 2015, 120, 3261–3285. [Google Scholar] [CrossRef]
- Ping, C.; Gang, Z.; Hauser, D.; Fei, X. Quasi-Gaussian probability density function of sea wave slopes from near nadir Ku-band radar observations. Remote Sens. Environ. 2018, 217, 86–100. [Google Scholar]
- Donnelly, W.; Carswell, J.; Mcintosh, R.; Chang, P.; Wilkerson, J.; Marks, F.; Black, P. Revised ocean backscatter models at C and Ku band under high-wind conditions. J. Geophys. Res. Ocean. 1999, 104, 11485–11497. [Google Scholar] [CrossRef]
- Fernandez, D.; Carswell, J.; Frasier, S.; Chang, P.; Black, P.; Marks, F. Dual-polarized C- and Ku-band ocean backscatter response to hurricane-force winds. J. Geophys. Res. 2006, 111, 1–17. [Google Scholar] [CrossRef]
- Sapp, J.; Chang, P.; Jelenak, Z.; Frasier, S.; Hartley, T. Sea-surface NRCS observations in high winds at low incidence angles. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Kudryavtsev, V.; Hauser, D.; Caudal, G.; Chapron, B. A semi-empirical model of the normalized radar cross section of the sea surface 1. Background model. J. Geophys. Res. 2003, 108, 2-1–2-24. [Google Scholar]
- Quilfen, Y.; Tournadre, J.; Chapron, B. Altimeter dual-frequency observations of surface winds, waves, and rain rate in tropical cyclone Isabel. J. Geophys. Res. Ocean. 2006, 111, 1–13. [Google Scholar] [CrossRef]
- Li, X.; Zhang, B.; Mouche, A.; He, Y.; Perrie, W. Ku-band sea surface radar backscatter at low incidence angles under extreme wind conditions. Remote Sens. 2017, 9, 474. [Google Scholar] [CrossRef]
- NASDA Earth Observation Center. TRMM Data Users Handbook; National Space Development Agency of Japan: Hiki-gun, Japan, 2001. [Google Scholar]
- Hou, A.; Kakar, R.; Neeck, S.; Azarbarzin, A.; Kummerow, C.; Kojima, M.; Nakamura, K.; Oki, R.; Iguchi, T. The global precipitation measurement mission. Bull. Amer. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Liao, L.; Meneghini, R. Validation of TRMM precipitation radar through comparison of its multiyear measurements with ground-based radar. J. Appl. Meteorol. Climatol. 2009, 48, 804–817. [Google Scholar] [CrossRef]
- Evans, D.; Conrad, C.; Paul, F. Handbook of Automated Data Quality Control Checks and Procedures; NOAA National Data Buoy Center Tech: Stennis Space Center, MS, USA, 2009.
- Liu, W.; Tang, W. Equivalent Neutral Wind; NASA Jet Propulsion Laboratory: Pasadena, CA, USA, 1996.
- Uhlhorn, E.; Black, P.; Franklin, J.; Goodberlet, M.; Carswell, J.; Goldstein, A. Hurricane surface wind measurements from an operational stepped frequency microwave radiometer. Mon. Weather Rev. 2007, 135, 3070–3085. [Google Scholar] [CrossRef]
- Klotz, B.; Uhlhorn, E. Improved stepped frequency microwave radiometer tropical cyclone surface winds in heavy precipitation. J. Atmos. Ocean. Technol. 2014, 31, 2392–2408. [Google Scholar] [CrossRef]
- Sapp, J.; Alsweiss, S.; Jelenak, Z.; Chang, P.; Carswell, J. Stepped frequency microwave radiometer wind-speed retrieval improvements. Remote Sens. 2019, 11, 214. [Google Scholar] [CrossRef]
- Powell, M.; Houston, S.; Amat, L.; Morisseau-Leroy, N. The HRD real-time hurricane wind analysis system. J. Wind. Eng. Ind. Aerodyn. 1998, 77, 53–64. [Google Scholar] [CrossRef]
- Dinapoli, S.; Bourassa, M.; Powell, M. Uncertainty and intercalibration analysis of H*Wind. J. Atmos. Ocean. Technol. 2012, 29, 822–833. [Google Scholar] [CrossRef]
- Li, S.; Shen, H.; Hou, Y.; He, Y.; Bi, F. Sea surface wind speed and sea state retrievals from dual-frequency altimeter and its preliminary application in global view of wind-sea and swell distributions. Int. J. Remote Sens. 2018, 39, 3076–3093. [Google Scholar] [CrossRef]
- Plant, W. A stochastic multiscale model of microwave backscatter from the ocean. J. Geophys. Res. Ocean. 2002, 107, 3-1–3-21. [Google Scholar] [CrossRef]
- Plant, W. Effects of wind variability on scatterometry at low wind speeds. J. Geophys. Res. 2000, 105, 16899–16910. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. 1997, 102, 15781–15796. [Google Scholar] [CrossRef]
- Kudryavtsev, V.; Makin, V.; Chapron, B. Coupled sea surface-atmosphere model 2. Spectrum of short wind waves. J. Geophys. Res. 1999, 104, 7625–7639. [Google Scholar] [CrossRef]
- Yurovskaya, M.; Dulov, V.; Chapron, B.; Kudryavtsev, V. Directional short wind wave spectra derived from the sea surface photography. J. Geophys. Res. Ocean. 2013, 118, 4380–4394. [Google Scholar] [CrossRef]
- Hwang, P.; Wang, D. An empirical investigation of source term balance of small scale surface waves. Geophys. Res. Lett. 2004, 31, L15301-1–L15301-5. [Google Scholar] [CrossRef]
- Hwang, P. Observations of swell influence on ocean surface roughness. J. Geophys. Res. 2008, 113, C12024-1–C12024-14. [Google Scholar] [CrossRef]
- Hwang, P.; Burrage, D.; Wang, D.; Wesson, J. Ocean surface roughness spectrum in high wind condition for microwave backscatter and emission computations. J. Atmos. Ocean. Tech. 2013, 30, 2168–2188. [Google Scholar] [CrossRef]
- Hwang, P.; Fois, F. Surface roughness and breaking wave properties retrieved from polarimetric microwave radar backscattering. J. Geophys. Res. Ocean. 2015, 120, 3640–3657. [Google Scholar] [CrossRef]
- Hwang, P.; Sletten, M.; Toporkov, J. Analysis of radar sea return for breaking wave investigation. J. Geophys. Res. 2008, 113, C02003-1–C02003-16. [Google Scholar] [CrossRef]
- Wentz, F.; Smith, D.; Mears, C.; Gentemann, C. Advanced algorithms for QuikScat and SeaWinds/AMSR. In Proceedings of the 2001 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Sydney, Australia, 9–13 July 2001. [Google Scholar]
- Hersbach, H.; Stoffelen, A.; Haan, S. An improved C-band scatterometer ocean geophysical model function: CMOD5. J. Geophys. Res. Ocean. 2005, 572, 1–18. [Google Scholar] [CrossRef]
- Isoguchi, O.; Shimada, M. An L-band ocean geophysical model function derived from PALSAR. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1925–1936. [Google Scholar] [CrossRef]
- Yueh, S.; Dinardo, S.; Fore, A.; Li, F. Passive and active L-band microwave observations and modeling of ocean surface winds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3087–3100. [Google Scholar] [CrossRef]
- Yan, Q.; Zhang, J.; Fan, C.; Meng, J. Analysis of Ku-and Ka-band sea surface backscattering characteristics at low-incidence angles based on the GPM dual-frequency precipitation radar measurements. Remote Sens. 2019, 11, 754. [Google Scholar] [CrossRef]
- Majurec, N.; Johnson, J.; Tanelli, S.; Durden, S. Comparison of model predictions with measurements of Ku- and Ka-band near-nadir normalized radar cross sections of the sea surface from the Genesis and Rapid Intensification Processes experiment. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5320–5332. [Google Scholar] [CrossRef]
- Verhoef, A.; Stoffelen, A. Algorithm Theoretical Basis Document for the OSI SAF Wind Products Version 1.7; Ocean and Sea Ice SAF, Royal Netherlands Meteorological Institute: De Bilt, The Netherlands, 2018. [Google Scholar]
- Yan, Q.; Zhang, J.; Fan, C.; Wang, J.; Meng, J. Study of sea surface slope distribution and its effect on radar backscatter based on GPM Ku-band precipitation radar measurements. J. Appl. Remote Sens. 2018, 12, 1–16. [Google Scholar] [CrossRef]
- Ulaby, F.; Long, D. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Jackson, F.; Walton, W.; Hines, D.; Walter, B.; Peng, C. Sea surface mean square slope from Ku-band backscatter data. J. Geophys. Res. 1992, 97, 11411–11427. [Google Scholar] [CrossRef]
- Donelan, M.; Haus, B.; Reul, N.; Plant, W.; Stiassnie, M.; Graber, H.; Brown, O.; Saltzman, E. On the limiting aerodynamic roughness of the ocean in very strong winds. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Chu, X.; He, Y.; Chen, G. Asymmetry and Anisotropy of Microwave Backscatter at Low Incidence Angles. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4014–4024. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Q.; Fan, C.; Zhang, J.; Meng, J. Understanding Ku-Band Ocean Radar Backscatter at Low Incidence Angles under Weak to Severe Wind Conditions by Comparison of Measurements and Models. Remote Sens. 2020, 12, 3445. https://doi.org/10.3390/rs12203445
Yan Q, Fan C, Zhang J, Meng J. Understanding Ku-Band Ocean Radar Backscatter at Low Incidence Angles under Weak to Severe Wind Conditions by Comparison of Measurements and Models. Remote Sensing. 2020; 12(20):3445. https://doi.org/10.3390/rs12203445
Chicago/Turabian StyleYan, Qiushuang, Chenqing Fan, Jie Zhang, and Junmin Meng. 2020. "Understanding Ku-Band Ocean Radar Backscatter at Low Incidence Angles under Weak to Severe Wind Conditions by Comparison of Measurements and Models" Remote Sensing 12, no. 20: 3445. https://doi.org/10.3390/rs12203445
APA StyleYan, Q., Fan, C., Zhang, J., & Meng, J. (2020). Understanding Ku-Band Ocean Radar Backscatter at Low Incidence Angles under Weak to Severe Wind Conditions by Comparison of Measurements and Models. Remote Sensing, 12(20), 3445. https://doi.org/10.3390/rs12203445