UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes

 , , and
, , and
Abstract
1. Introduction
1.1. From Outside-to-Inside
1.2. From Fieldwork to Virtual Design: BIM as a Tool towards Sustainability
2. Objectives
2.1. Bringing the Outside-to-Inside Methodology Closer to the User
- Topography: Its application not only consists of the collection and cataloging of data but also if the novelty of the inside to outside perspective is added in this chronological stage of the design implementation process, it can serve as a real scenario of the architecture and be used as a projection tool.
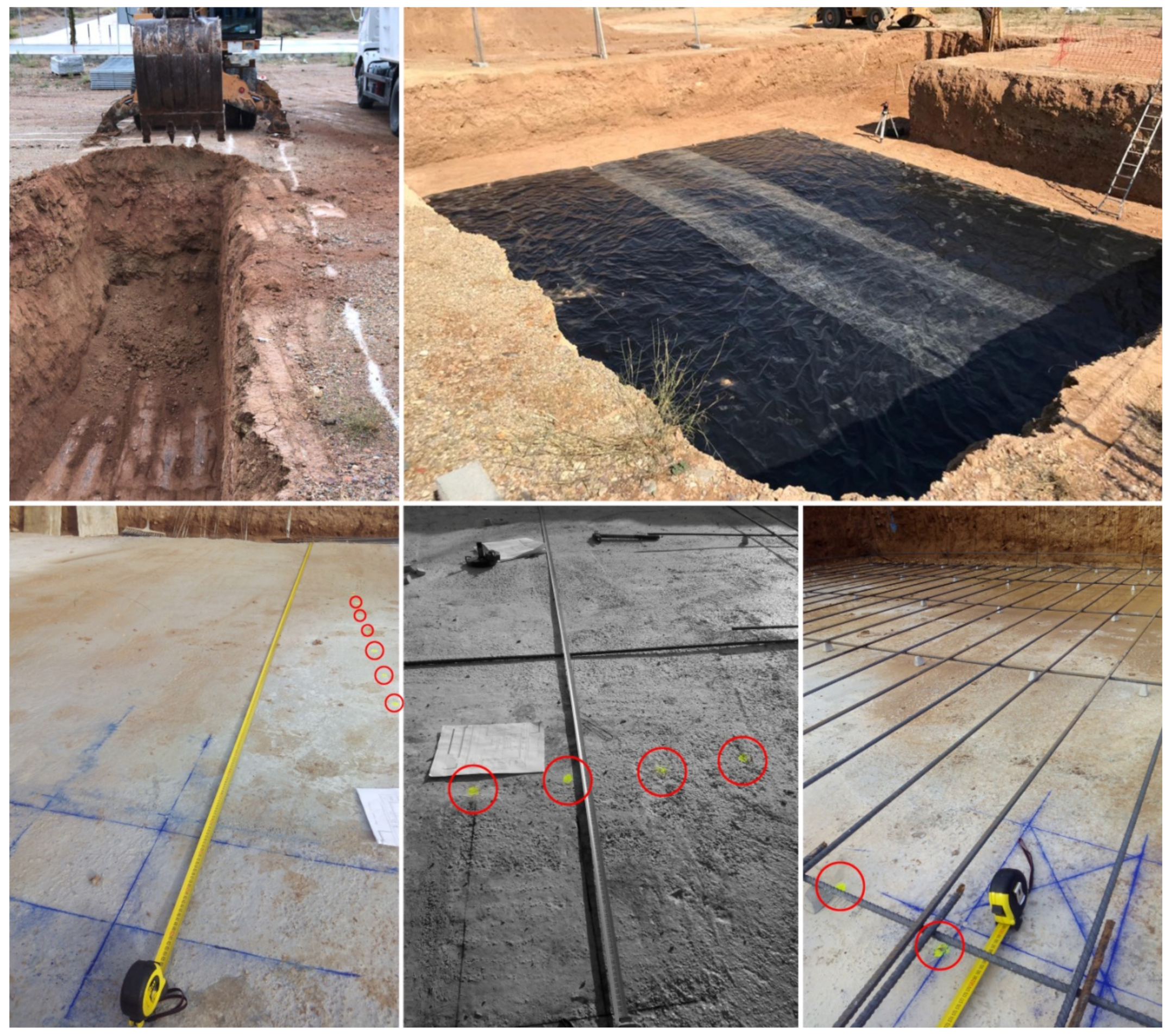
- Stakeout: Through the application of UAVs, the novelty of serving as a tool for staking out foundations and arming is proposed.
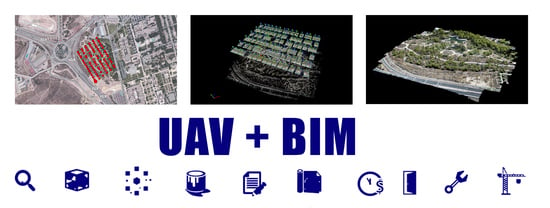
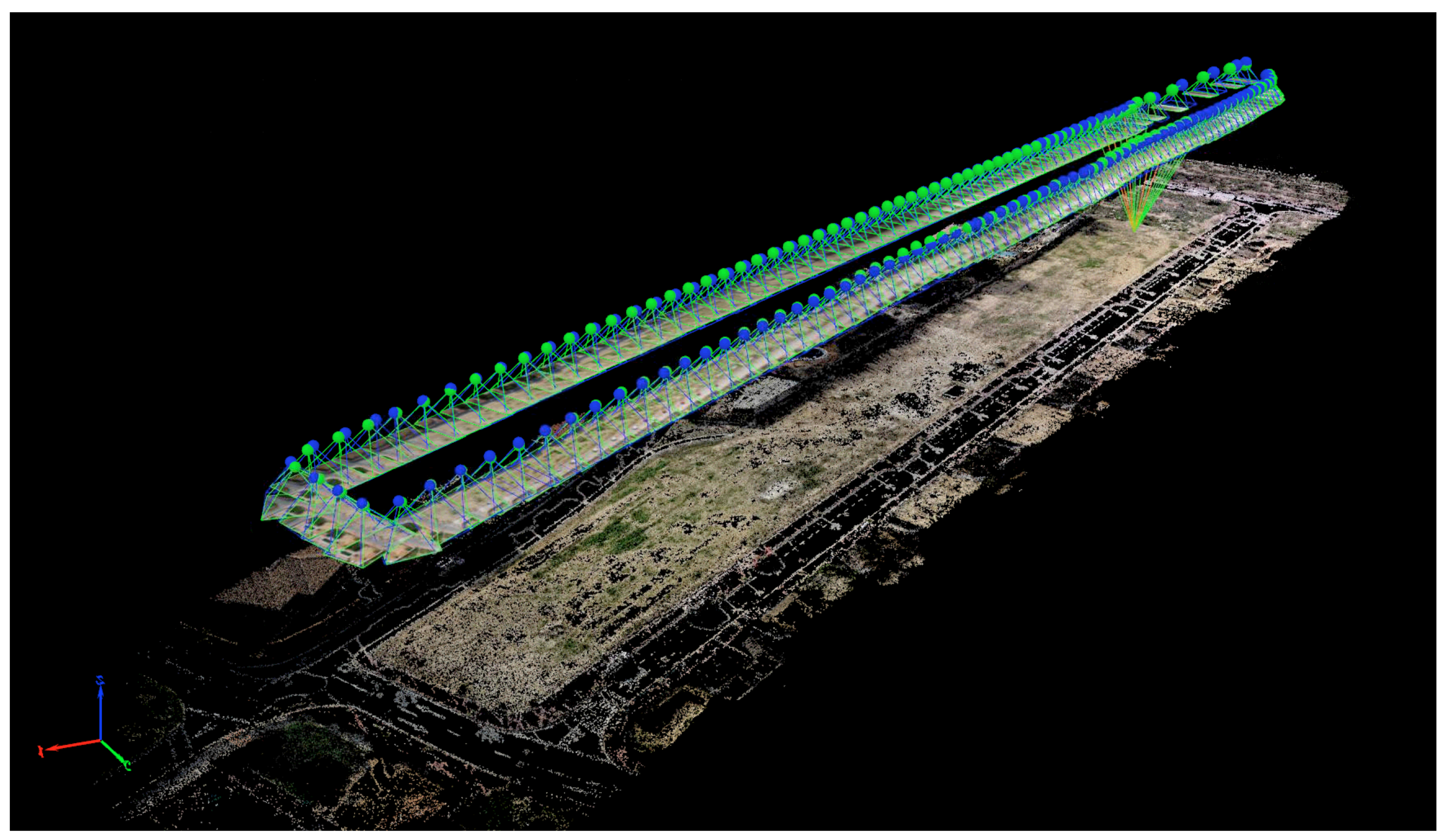
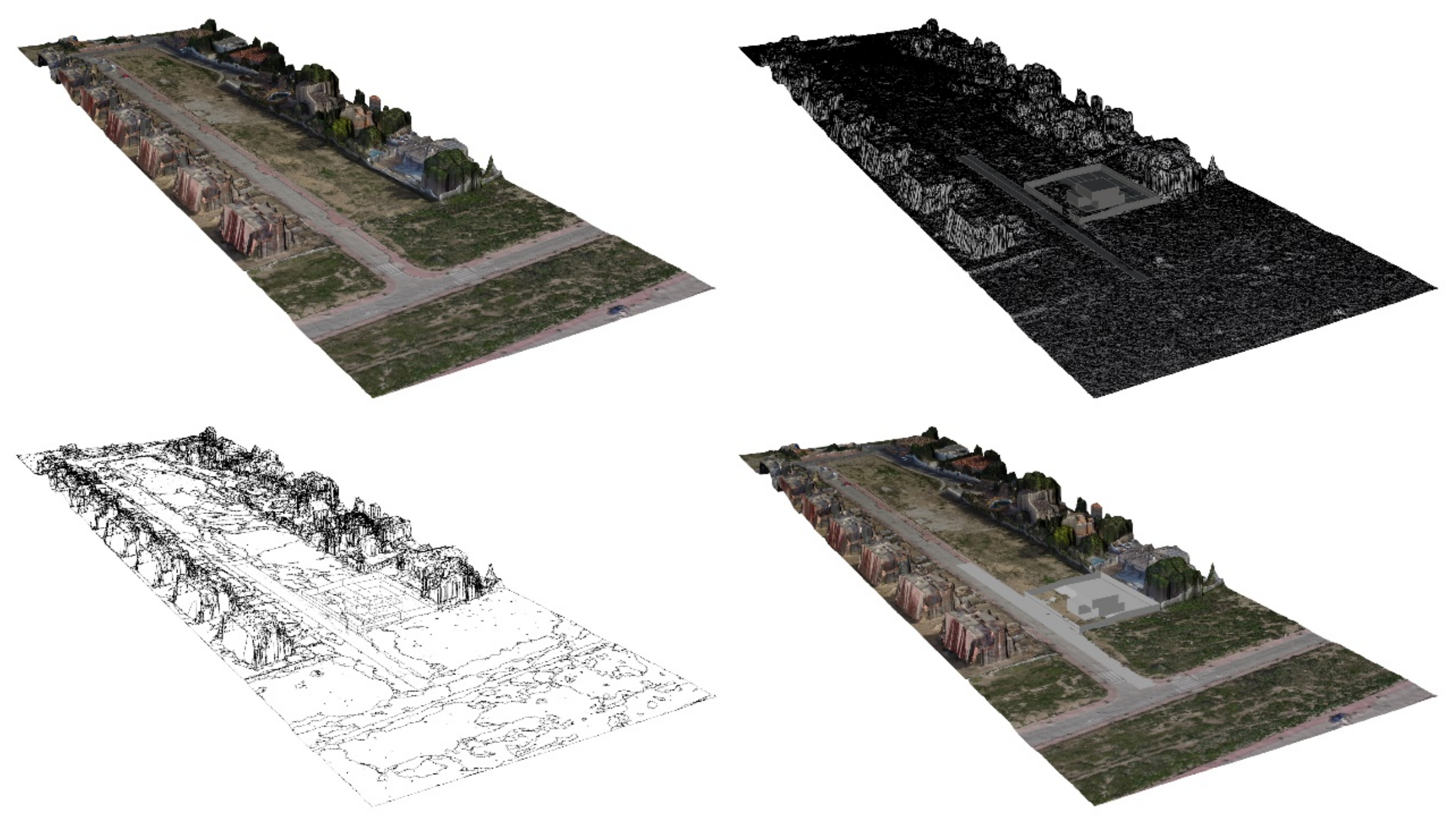
2.2. UAV Environment Acquisition. Photogrammetric 3D Reconstruction
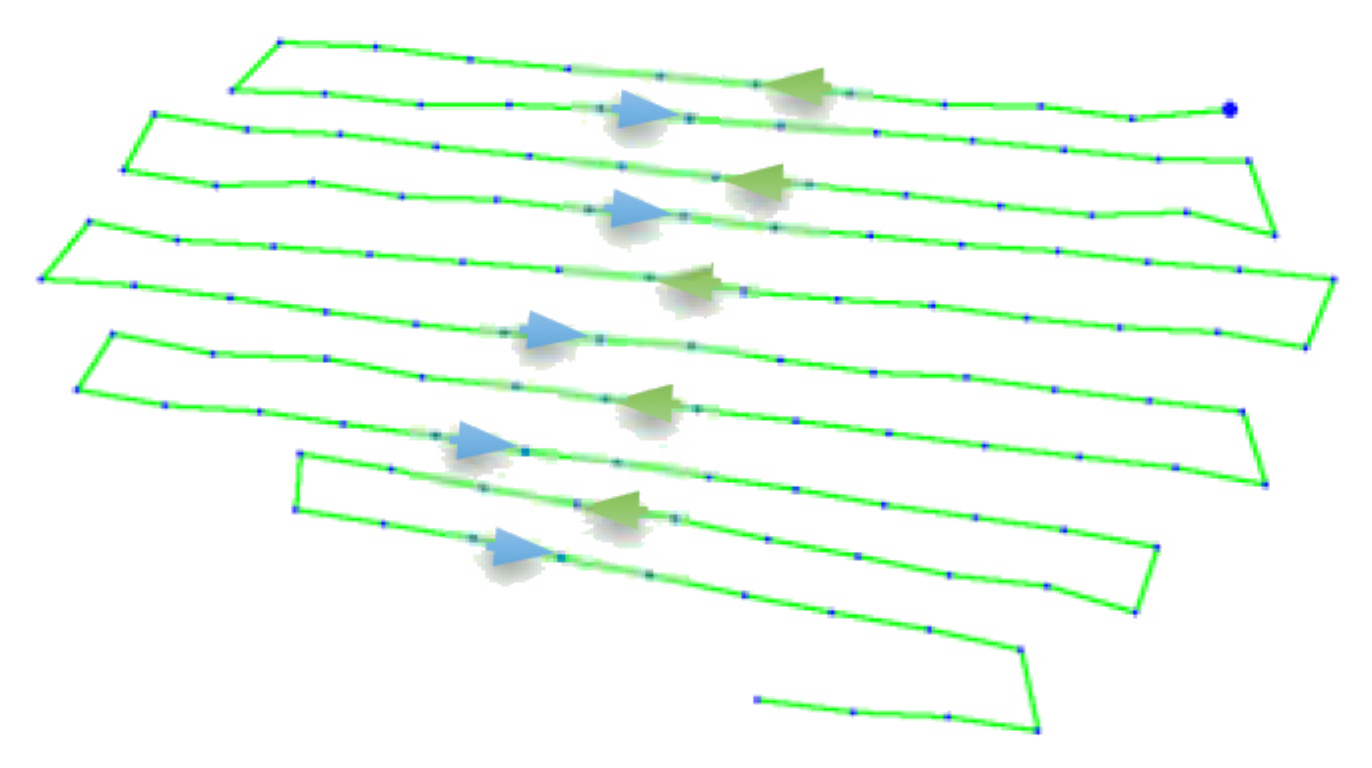
- Programming the route with the premises
- Obtaining images
- Image adjustment and correlation.
- Correspondence of the same point in several images.
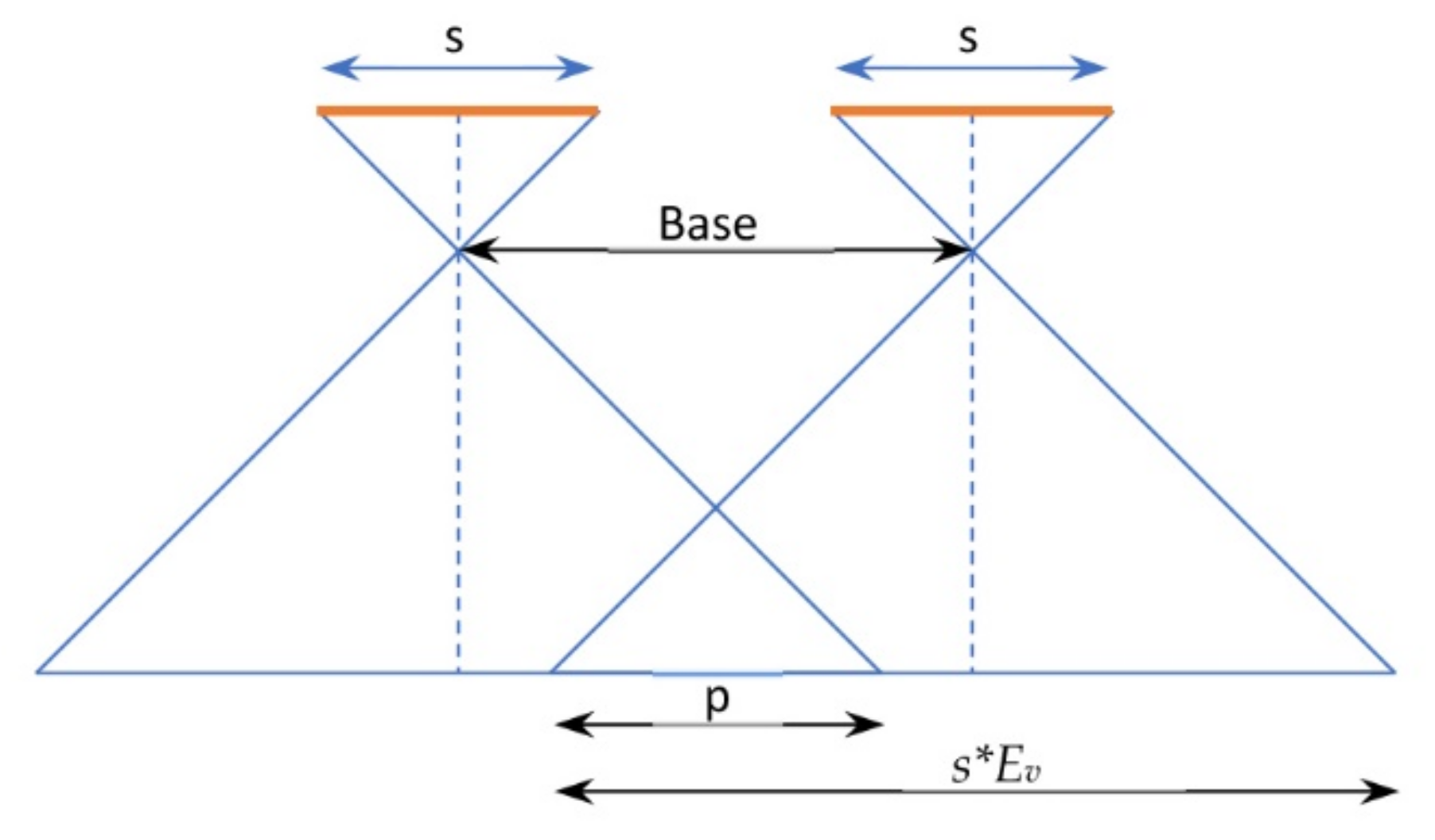
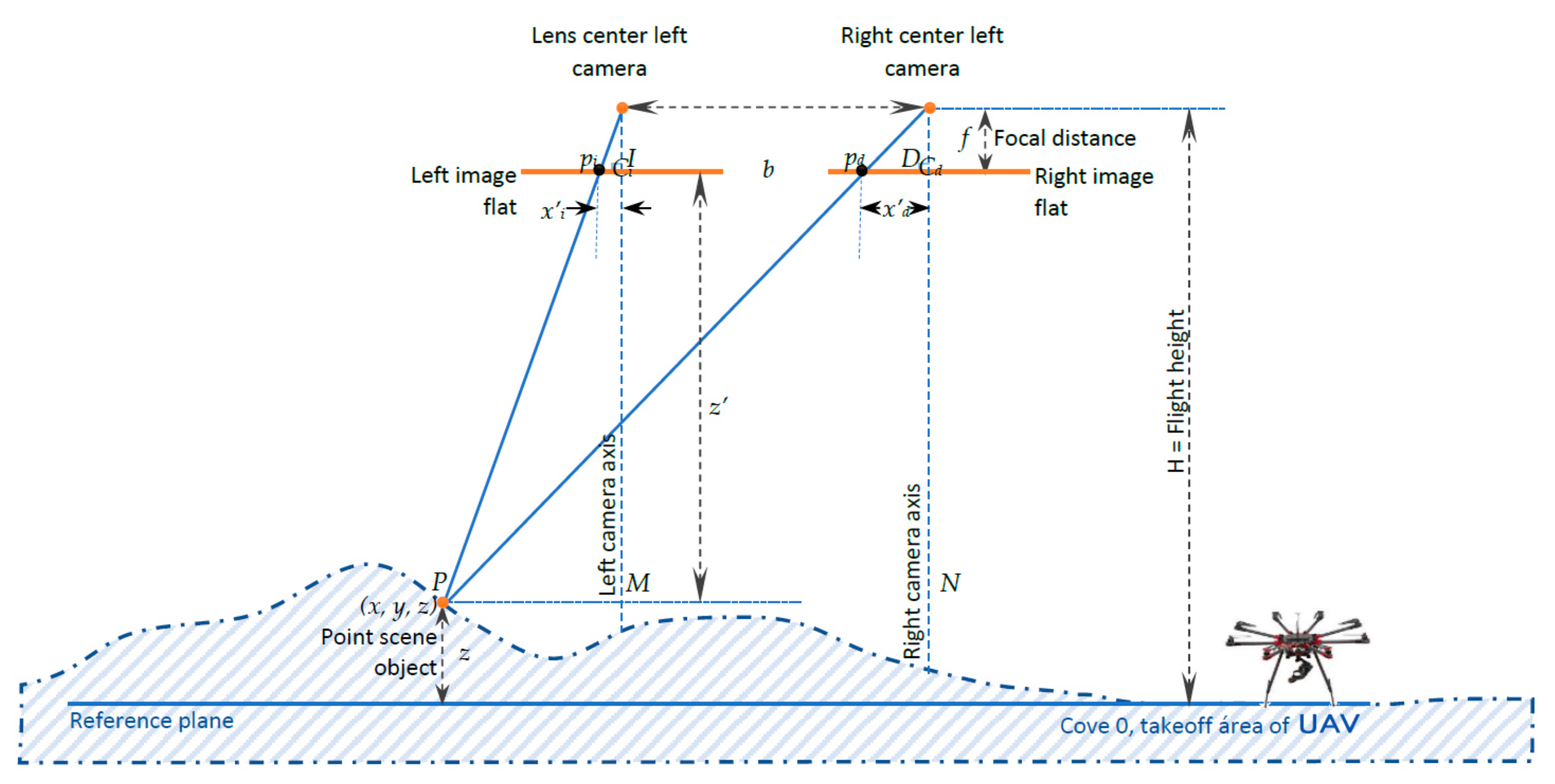
- Dimensioning by means of epipolar geometry.
3. Method
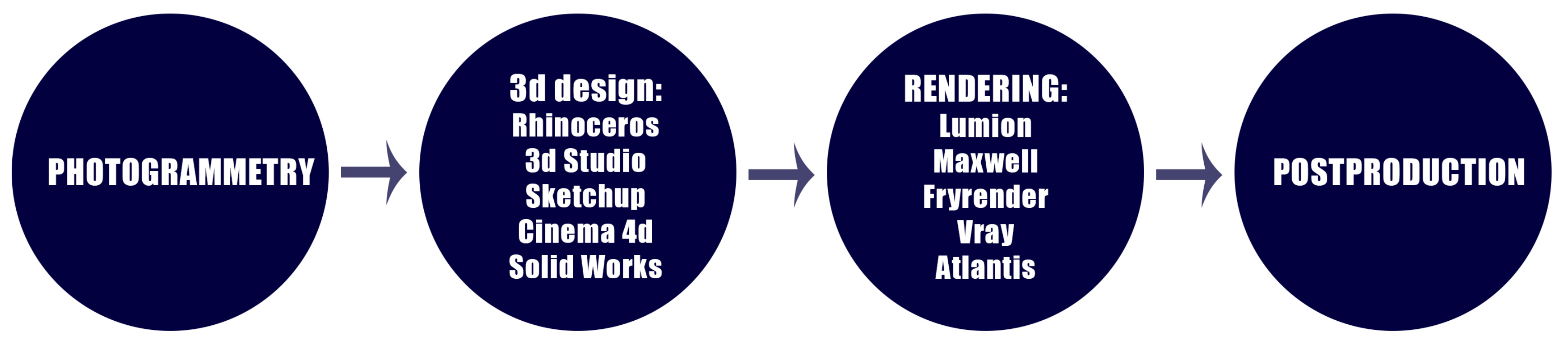
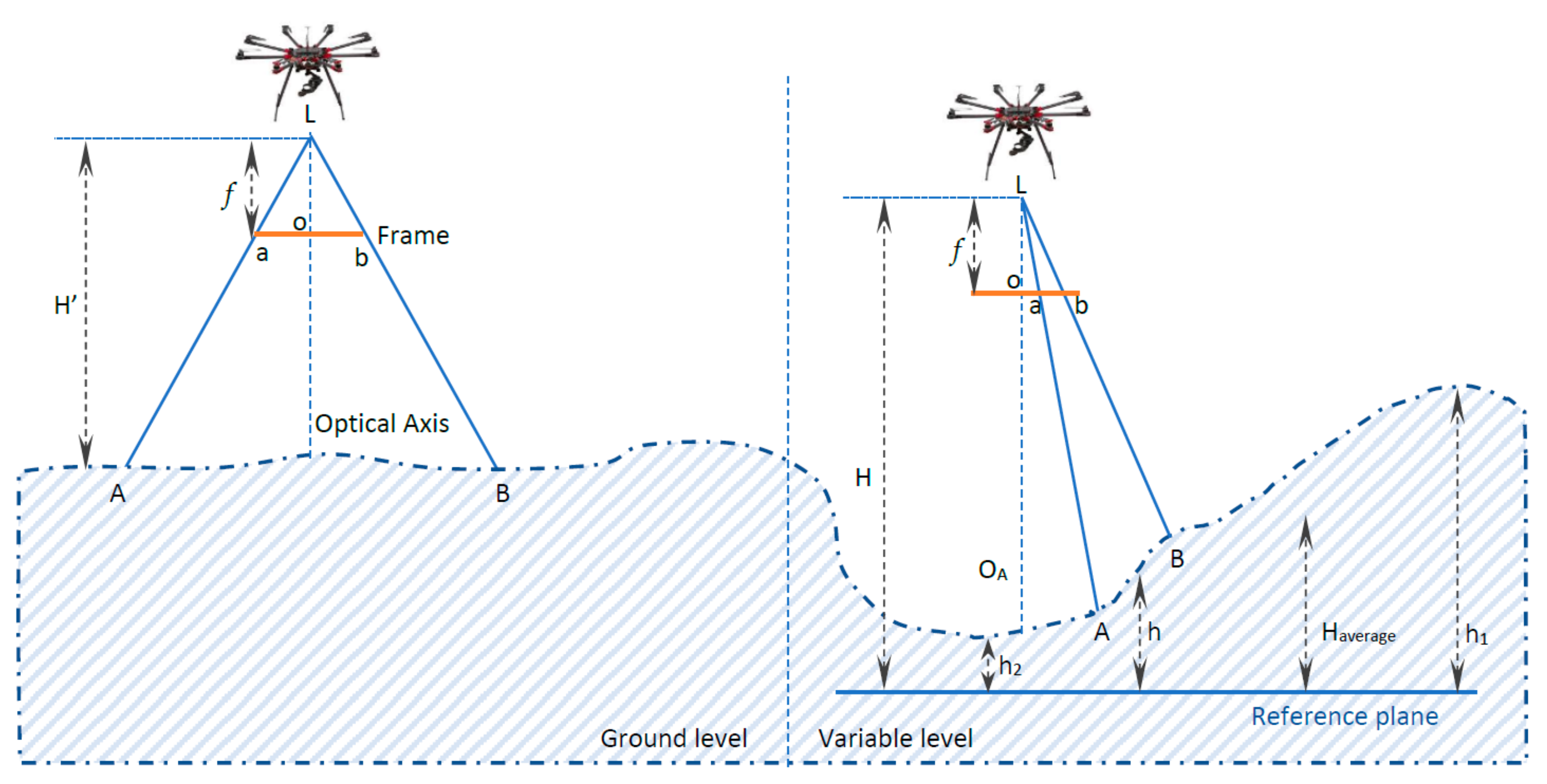
3.1. Photogrammetry with UAV
3.2. Stereoscopic Correspondence
- Internal orientation. Determination of the perspective beam from the data known as the focal length and other parameters mentioned.
- Relative guidance. Determination of the position of one beam in relation to the other.
- Absolute orientation. Location and scaling according to a system of terrain coordinates
- Restitution. Identification and correspondence of homologous rays and therefore of the height of the points on the ground.
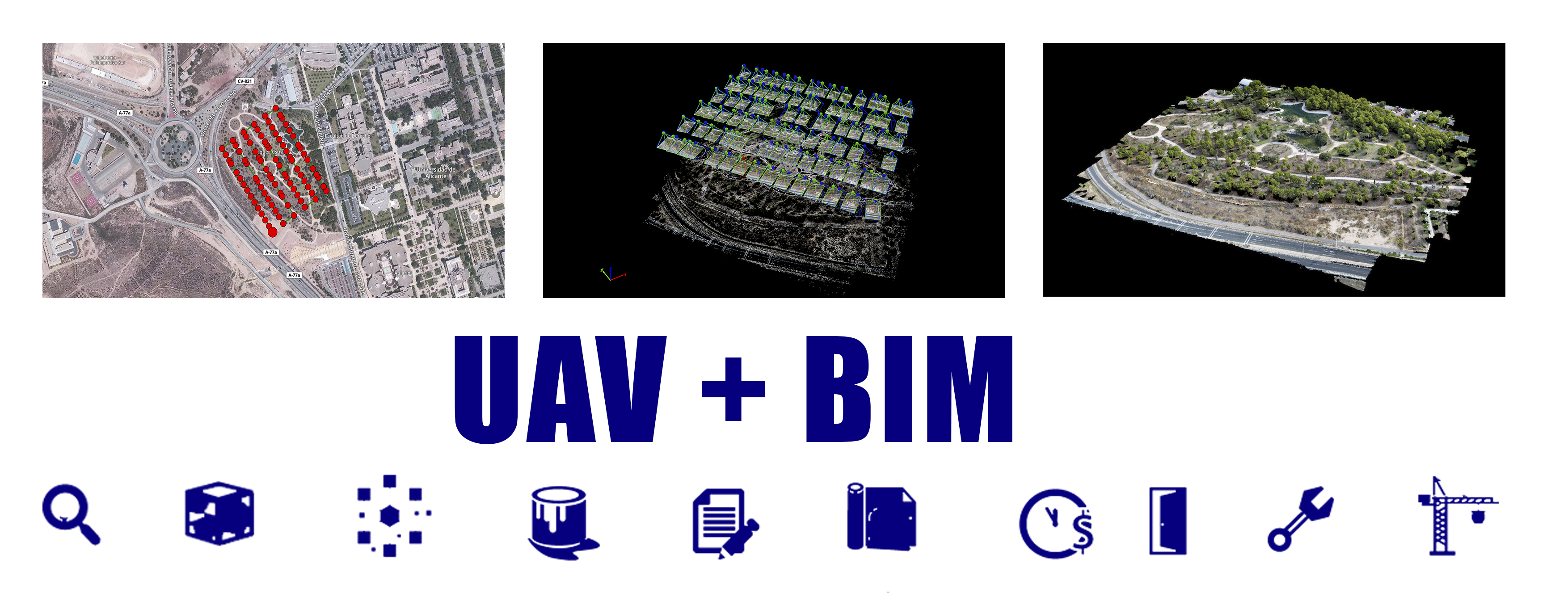
3.3. Description of the Photogrammetric Techniques Used
3.4. The BIM Software Interconnection. Connection of BIM Modules
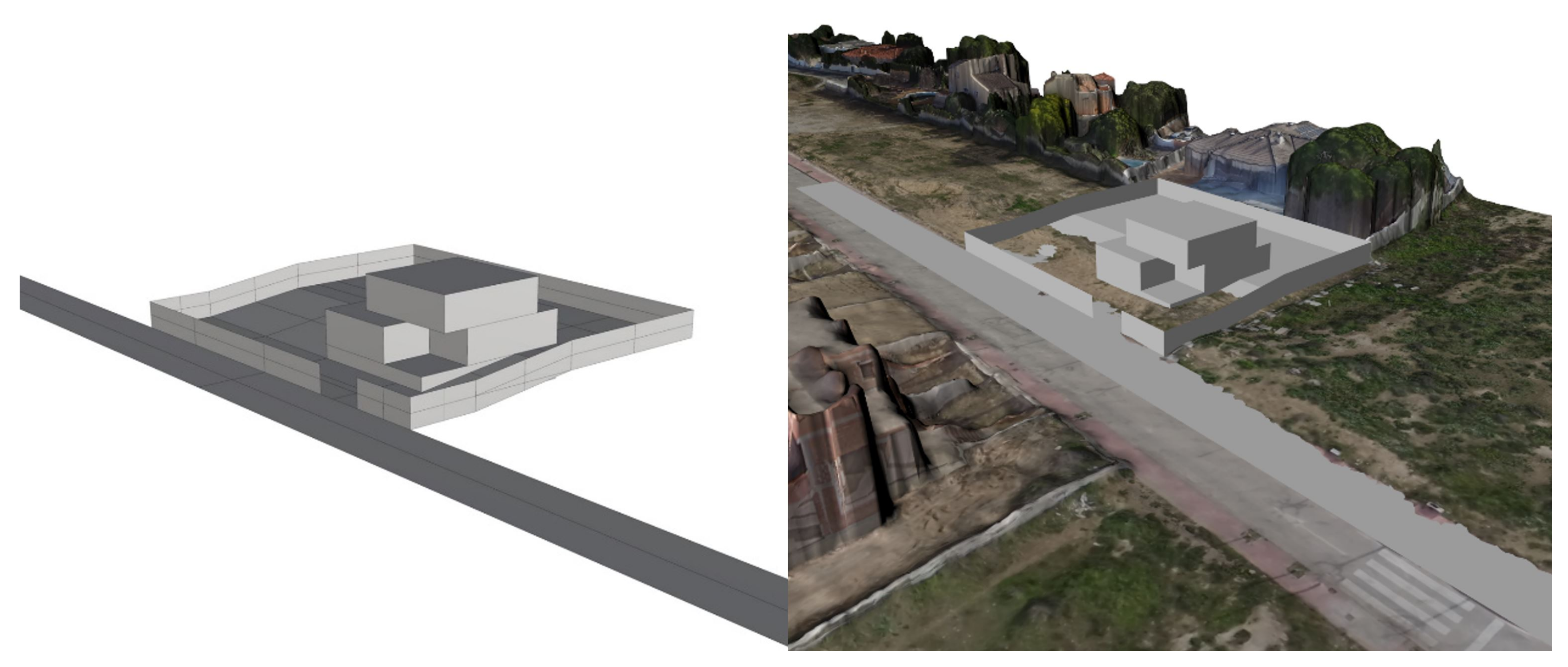
3.5. Integration of the Projected Building with Building Information Modeling (BIM)
4. Evaluation of the Results Obtained in the Experience. Classic Method against UAV + BIM
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eisenbeiss, H.; Sauerbier, M. Investigation of uav systems and flight modes for photogrammetric applications. Photogramm. Rec. 2011, 26, 400–421. [Google Scholar] [CrossRef]
- García-Pulido, L.J.; Jaramillo, J.R.; Dorado, M.I.A. Heritage survey and scientific analysis of the watchtowers that defended the last Islamic Kingdom in the iberian peninsula (Thirteen To Fifeteenth Century). ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W5, 259–265. [Google Scholar]
- Irschara, A.; Kaufmann, V.; Klopschitz, M.; Bischof, H.; Leberl, F. Towards Fully Automatic Photogrammetric Reconstruction Using Digital Images Taken from UAVs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 65–70. [Google Scholar]
- Colomina, I.; Blázquez, M.; Molina, P.; Parés, M.E.; Wis, M. Towards a new paradigm for high-resolution low-cost photogrammetryand remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII, 1201–1206. [Google Scholar]
- Rodriguez-Navarro, P.; Gil-Piqueras, T.; Verdiani, G. Drones for Architectural Surveying. Their Use in Documenting Towers of the Valencian Coast. Available online: https://www.researchgate.net/publication/320066302_Drones_for_Architectural_Surveying_Their_Use_in_Documenting_Towers_of_the_Valencian_Coast (accessed on 12 January 2020).
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Accuracy of Digital Surface Models and Orthophotos Derived from Unmanned Aerial Vehicle Photogrammetry. J. Surv. Eng. 2017, 143, 04016025. [Google Scholar] [CrossRef]
- Dai, F.; Lu, M. Assessing the Accuracy of Applying Photogrammetry to Take Geometric Measurements on Building Products. J. Constr. Eng. Manag. 2010, 136, 242–250. [Google Scholar] [CrossRef]
- Fraser, C.S.; Edmundson, K.L. Design and implementation of a computational processing system for off-line digital close-range photogrammetry. ISPRS J. Photogram. Remote Sens. 2000, 55, 94–104. [Google Scholar] [CrossRef]
- Everaerts, J. The use of unmanned aerial vehicles (UAVs) for remote sensing and mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1187–1192. [Google Scholar]
- Hiep, V.H.; Keriven, R.; Labatut, P.; Pons, J.P. Towards high-resolution large-scale multi-view stereo. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1430–1437. [Google Scholar]
- Opitz, R.; Simon, K.; Barnes, A.; Fisher, K.; Lippiello, L. Close-Range Photogrammetry vs. 3D Scanning: Comparing Data Capture, Processing and Model Generation in the Field and the Lab. Available online: https://www.google.com.hk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwj685XmstjqAhUhGaYKHbY6CQAQFjABegQIAhAB&url=https%3A%2F%2Fncptt.nps.gov%2Fwp-content%2Fuploads%2Fsimon.pdf&usg=AOvVaw2sB1-arFK-LCViuMGoKuox (accessed on 12 January 2020).
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. On Integrating Unmanned Aircraft Systems into the National Airspace System; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Kim, K.; Hyun, J.; Myung, H. Development of aerial image transmitting sensor platform for disaster site surveillance. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems, Jeju, South Korea, 18–21 October 2017; pp. 794–796. [Google Scholar]
- Sánchez-Bou, C.; López-Pujol, J. The coming revolution: The use of drones in plant conservation. Collect. Bot. 2014, 33, 7. [Google Scholar]
- Wing, M.G.; Burnett, J.D.; Sessions, J. Remote Sensing and Unmanned Aerial System Technology for Monitoring and Quantifying Forest Fire Impacts. Int. J. Remote Sens. Appl. 2014, 4, 18. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A.; et al. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Ivosevic, B.; Han, Y.G.; Kwon, O. Calculating coniferous tree coverage using unmanned aerial vehicle photogrammetry. J. Ecol. Environ. 2017, 41, 10. [Google Scholar] [CrossRef]
- Harvey, M.C.; Harvey, C.C.; Rowland, J.; Luketina, K.M. Drones in geothermal exploration: Thermal infrared imagery, aerial photos and digital elevation models. In Proceedings of the 6th African Rift Geothermal Conference, Addis Ababa, Ethiopia, 2–4 November 2016. [Google Scholar]
- Bohmann, K.; Schnell, I.B.; Gilbert, M.T.P. When bugs reveal biodiversity. Mol. Ecol. 2013, 22, 909–911. [Google Scholar] [CrossRef] [PubMed]
- Gasinec, J.; Gašincová, S.; Černota, P.; Staňková, H. Uses of terrestrial laser sanning in mnitoring of ground ice within dobšinská ice cave. J. Pol. Miner. Eng. Soc. 2012, 30, 31–42. [Google Scholar]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone Technology: Types, Payloads, Applications, Frequency Spectrum Issues and Future Developments In The Future of Drone Use; TMC Asser Press: The Hague, The Netherlands, 2016. [Google Scholar]
- Ivošević, B.; Han, Y.G.; Cho, Y.; Kwon, O. The use of conservation drones in ecology and wildlife research. J. Ecol. Environ. 2015, 38, 113–118. [Google Scholar] [CrossRef]
- Vaquero-Melchor, D.; Campaña, I.; Bernardos, A.M.; Bergesio, L.; Besada, J.A. A distributed drone-oriented architecture for in-flight object detection. In Proceedings of the 13th International Conference on Hybrid Artificial Intelligence Systems, Oviedo, Spain, 20–22 June 2018; Springer: Cham, The Netherlands, 2018. [Google Scholar]
- Arias, P.; Herráez, J.; Lorenzo, H.; Ordóñez, C. Control of structural problems in cultural heritage monuments using close-range photogrammetry and computer methods. Comput. Struct. 2005, 83, 1754–1766. [Google Scholar] [CrossRef]
- Püschel, H.; Sauerbier, M.; Eisenbeiss, H. A 3D model of Castle Landenberg (CH) from combined photogrammetric processing of terrestrial and UAV-based images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 93–98. [Google Scholar]
- Aydin, C.C. Designing building façades for the urban rebuilt environment with integration of digital close-range photogrammetry and geographical information systems. Autom. Constr. 2014, 43, 38–48. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3d modeling—Current status and future perspectives. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 25–31. [Google Scholar] [CrossRef]
- Mirjan, A.; Gramazio, F.; Kohler, M.; Augugliaro, F.; Andrea, R.D. Architectural fabrication of tensile structures with flying machines. In Green Design, Materials and Manufacturing Processes; Taylor & Francis Group: London, UK, 2013. [Google Scholar]
- Vempati, A.S. PaintCopter: An Autonomous UAV for Spray Painting on Three-Dimensional Surfaces. IEEE Robot. Autom. Lett. 2018, 3, 2862–2869. [Google Scholar] [CrossRef]
- Augugliaro, F. The flight assembled architecture installation: Cooperative contruction with flying machines. IEEE Control Syst. 2014, 34, 46–64. [Google Scholar]
- Chaltiel, S.; Bravo, M.; Chronis, A. Digital fabricationwith Virtual and Augmented Reality for Monolithic Shells. Available online: https://www.researchgate.net/publication/320839954_Digital_fabrication_with_Virtual_and_Augmented_Reality_for_Monolithic_Shells (accessed on 12 January 2020).
- Garrigós, A.; Kouider, T. The Virtual Interactive Relationship Between BIM Project Teams: Effective Communication to aid Collaboration in the Design Process. In Healthy Buildings, Innovation, Desing & Technology: Conference Proceedings of the 6th International Congress of Architectural Technology; Universidad de Alicante: San Vicente del Raspeig, Spain, 2016; pp. 12–14. [Google Scholar]
- Gaujena, B.; Borodinecs, A.; Zemitis, J.; Prozuments, A. Influence of Building Envelope Thermal Mass on Heating Design Temperature. IOP Conf. Ser. Mater. Sci. Eng. 2015, 96, 012031. [Google Scholar] [CrossRef]
- Domínguez, S.; Sendra, J.J.; León, A.L.; Esquivias, P.M. Towards Energy Demand Reduction in Social Housing Buildings: Envelope System Optimization Strategies. Energies 2012, 5, 2263–2287. [Google Scholar] [CrossRef]
- Cho, Y.K.; Ham, Y.; Golpavar-Fard, M. 3D as-is building energy modeling and diagnostics: A review of the state-of-the-art. Adv. Eng. Inform. 2015, 29, 184–195. [Google Scholar] [CrossRef]
- Pellegrino, J.; Fanney, A.H.; Persily, A.K.; Domanski, P.A.; Healy, W.M.; Bushby, S.T. Measurement Science Roadmap for Net-Zero Energy Buildings; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2010; p. 1660. [Google Scholar]
- Larsen, K.E.; Lattke, F.; Ott, S.; Winter, S. Surveying and digital workflow in energy performance retrofit projects using prefabricated elements. Autom. Constr. 2011, 20, 999–1011. [Google Scholar] [CrossRef]
- Wang, C.; Cho, Y.K.; Gai, M. As-Is 3D Thermal Modeling for Existing Building Envelopes Using a Hybrid LIDAR System. J. Comput. Civ. Eng. 2013, 27, 645–656. [Google Scholar] [CrossRef]
- Lou, J.; Xu, J.; Wang, K. Study on Construction Quality Control of Urban Complex Project Based on BIM. Procedia Eng. 2017, 174, 668–676. [Google Scholar] [CrossRef]
- Azhar, S.; Brown, J. BIM for Sustainability Analyses. Int. J. Constr. Educ. Res. 2009, 5, 276–292. [Google Scholar] [CrossRef]
- Bruce-Hyrkäs, T.; Pasanen, P.; Castro, R. Overview of Whole Building Life-Cycle Assessment for Green Building Certification and Ecodesign through Industry Surveys and Interviews. Procedia CIRP 2018, 69, 178–183. [Google Scholar] [CrossRef]
- Jalaei, F.; Jrade, A. Integrating Building Information Modeling (BIM) and energy analysis tools with green building certification system to conceptually design sustainable buildings. J. Inf. Technol. Constr. 2014, 19, 494–519. [Google Scholar]
- Turner, W.J.; Kinnane, O.; Basu, B. Demand-side Characterization of the Smart City for Energy Modelling. Energy Procedia 2014, 62, 160–169. [Google Scholar] [CrossRef][Green Version]
- Krygiel, E.; Nies, B. Green BIM: Successful Sustainable Design with Building Information Modeling; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Peruzzi, L.; Salata, F.; de Lieto Vollaro, A.; de Lieto Vollaro, R. The reliability of technological systems with high energy efficiency in residential buildings. Energy Build. 2014, 68, 19–24. [Google Scholar] [CrossRef]
- Pérez-Lombard, L.; Ortiz, J.; Pout, C. A review on buildings energy consumption information. Energy Build. 2008, 40, 394–398. [Google Scholar] [CrossRef]
- Vollaro, R.D.L.; Guattari, C.; Evangelisti, L.; Battista, G.; Carnielo, E.; Gori, P. Building energy performance analysis: A case study. Energy Build. 2015, 87, 87–94. [Google Scholar] [CrossRef]
- Ham, Y.; Golparvar-Fard, M. Mapping actual thermal properties to building elements in gbXML-based BIM for reliable building energy performance modeling. Autom. Constr. 2015, 49, 214–224. [Google Scholar] [CrossRef]
- Motawa, I.; Carter, K. Sustainable BIM-based Evaluation of Buildings. Procedia Soc. Behav. Sci. 2013, 74, 419–428. [Google Scholar] [CrossRef]
- Kim, J.B.; Jeong, W.; Clayton, M.J.; Haberl, J.S.; Yan, W. Developing a physical BIM library for building thermal energy simulation. Autom. Constr. 2015, 50, 16–28. [Google Scholar] [CrossRef]
- Martínez-Rocamora, A.; Solís-Guzmán, J.; Marrero, M. LCA databases focused on construction materials: A review. Renew. Sustain. Energy Rev. 2016, 58, 565–573. [Google Scholar] [CrossRef]
- Scheuer, C.; Keoleian, G.A.; Reppe, P. Life cycle energy and environmental performance of a new university building: Modeling challenges and design implications. Energy Build. 2003, 35, 1049–1064. [Google Scholar] [CrossRef]
- Raji, B.; Tenpierik, M.; van den Dobbelsteen, A. Early-Stage Design Considerations for the Energy-Efficiency of High-Rise Office Buildings. Sustainability 2017, 9, 623. [Google Scholar] [CrossRef]
- Mahdavi, A.; Doppelbauer, E.M. A performance comparison of passive and low-energy buildings. Energy Build. 2010, 42, 1314–1319. [Google Scholar] [CrossRef]
- Qin, Z.; Zhai, G.; Wu, X.; Yu, Y.; Zhang, Z. Carbon footprint evaluation of coal-to-methanol chain with the hierarchical attribution management and life cycle assessment. Energy Convers. Manag. 2016, 124, 168–179. [Google Scholar] [CrossRef]
- Thormark, C. A low energy building in a life cycle—Its embodied energy, energy need for operation and recycling potential. Build. Environ. 2002, 37, 429–435. [Google Scholar] [CrossRef]
- Bribián, I.Z.; Usón, A.A.; Scarpellini, S. Life cycle assessment in buildings: State-of-the-art and simplified LCA methodology as a complement for building certification. Build. Environ. 2009, 44, 2510–2520. [Google Scholar] [CrossRef]
- Tronchin, L.; Fabbri, K. Energy performance building evaluation in Mediterranean countries: Comparison between software simulations and operating rating simulation. Energy Build. 2008, 40, 1176–1187. [Google Scholar] [CrossRef]
- Serrano, A.R.; Álvarez, S.P. Life Cycle Assessment in Building: A Case Study on the Energy and Emissions Impact Related to the Choice of Housing Typologies and Construction Process in Spain. Sustainability 2016, 8, 287. [Google Scholar] [CrossRef]
- Evangelisti, L.; Battista, G.; Guattari, C.; Basilicata, C.; de Lieto Vollaro, R. Analysis of Two Models for Evaluating the Energy Performance of Different Buildings. Sustainability 2014, 6, 5311–5321. [Google Scholar] [CrossRef]
- Evangelisti, L. Influence of the Thermal Inertia in the European Simplified Procedures for the Assessment of Buildings’ Energy Performance. Sustainability 2014, 6, 4514–4524. [Google Scholar] [CrossRef]
- Macias, J.; Iturburu, L.; Rodriguez, C.; Agdas, D.; Boero, A.; Soriano, G. Embodied and operational energy assessment of different construction methods employed on social interest dwellings in Ecuador. Energy Build. 2017, 151, 107–120. [Google Scholar] [CrossRef]
- Carrión, M.T.P.; Prieto, J.I.; Boza, R.E.; Tomás, R.; Cardona, M.G.S.; Díaz, M.D.C. Las Maquetas Como Material Didáctico Para la EnseñAnza y Aprendizaje de la Lectura e Interpretación de Planos en la Ingeniería. Available online: https://docplayer.es/18845885-Las-maquetas-como-material-didactico-para-la-ensenanza-y-aprendizaje-de-la-lectura-e-interpretacion-de-planos-en-la-ingenieria.html (accessed on 12 January 2020).
- Koch, R. 3-D Modeling of Human Heads from Stereoscopic Image Sequences; Springer: Berlin/Heidelberg, Germany, 1996; pp. 169–178. [Google Scholar]
- Otero, I.; Ezquerra, A.; Solano, R.; Martín, L.; Bachelor, I. FOTOGRAMETRÍA. Available online: http://ocw.upm.es/pluginfile.php/1068/mod_label/intro/fotogrametria_cap_libro.pdf (accessed on 12 January 2020).
- Schenk, T. Introduction to Photogrammetry; ETSI Roads, Canals and Ports; The Ohio State University: Columbus, OH, USA, 2005. [Google Scholar]
- Gu, N.; London, K. Understanding and facilitating BIM adoption in the AEC industry. Autom. Constr. 2010, 19, 988–999. [Google Scholar] [CrossRef]
- Succar, B.; Sher, W.; Williams, A. Measuring BIM performance: Five metrics. Archit. Eng. Des. Manag. 2012, 8, 120–142. [Google Scholar] [CrossRef]
- Achille, C.; Lombardini, N.; Tommasi, C. BIM and cultural heritage: Compatibility tests in an archaeological site. Trans. Built Environ. 2015, 149, 593–604. [Google Scholar]
- Scianna, A.; Gristina, S.; Paliaga, S. Experimental BIM applications in archaeology: A work-flow. In Proceedings of the Euro-Mediterranean Conference, Limassol, Cyprus, 3–8 November 2014; Springer: Cham, The Netherlands, 2014. [Google Scholar]
- Real Decreto 314/2006, de 17 de Marzo, por el que se Aprueba el Código Técnico de la Edificación. Available online: https://www.boe.es/buscar/act.php?id=BOE-A-2006-5515 (accessed on 12 January 2020).
- Corbusier, L.; International Congresses for Modern Architecture. An die Studenten: Die “Charte d’Athènes”; Rowohlt: Reinbek, Germany, 1962. [Google Scholar]
- Neutra, R. Gestaltete Umwelt: Erfahrungen und Forderungen Eines Architekten; Verlag der Kunst: Dresden, Germany, 1976. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Early Project Phase | Assumption 1 Traditional/2D | Assumption 2 Traditional/3D BIM | Assumption 3 UAV/3D BIM |
|---|---|---|---|
| Accuracy | 50% | 75% | 100% |
| Time (plot 500 m) | 4 h + 1 h | 4 h + 1 h | 1 h + 1 h |
| Interconnection | 70% | 85% | 100% |
| Changes | NOT | NOT | YES |
| 360° | NOT | YES | YES |
| Tour | NOT | NOT | YES |
| Armed Stakeout | Assumption 1 Traditional/2D | Assumption 2 Traditional/3D BIM | Assumption 3 UAV/3D BIM |
|---|---|---|---|
| Accuracy | mm/cm | mm/cm | mm/mm |
| Time 100 m slab | 1 h | 1 h | 0.7 h |
| Accuracy | 70% | 85% | 100% |
| Staff | 2 | 2 | 1 (UAV pilot) |
| Control | under | medium | high |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizo-Maestre, C.; González-Avilés, Á.; Galiano-Garrigós, A.; Andújar-Montoya, M.D.; Puchol-García, J.A. UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes. Remote Sens. 2020, 12, 2329. https://doi.org/10.3390/rs12142329
Rizo-Maestre C, González-Avilés Á, Galiano-Garrigós A, Andújar-Montoya MD, Puchol-García JA. UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes. Remote Sensing. 2020; 12(14):2329. https://doi.org/10.3390/rs12142329
Chicago/Turabian StyleRizo-Maestre, Carlos, Ángel González-Avilés, Antonio Galiano-Garrigós, María Dolores Andújar-Montoya, and Juan Antonio Puchol-García. 2020. "UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes" Remote Sensing 12, no. 14: 2329. https://doi.org/10.3390/rs12142329
APA StyleRizo-Maestre, C., González-Avilés, Á., Galiano-Garrigós, A., Andújar-Montoya, M. D., & Puchol-García, J. A. (2020). UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes. Remote Sensing, 12(14), 2329. https://doi.org/10.3390/rs12142329