Super Resolution by Deep Learning Improves Boulder Detection in Side Scan Sonar Backscatter Mosaics


Abstract
1. Introduction
2. Data and Methods
2.1. Acoustic Data
2.2. Regional Setting
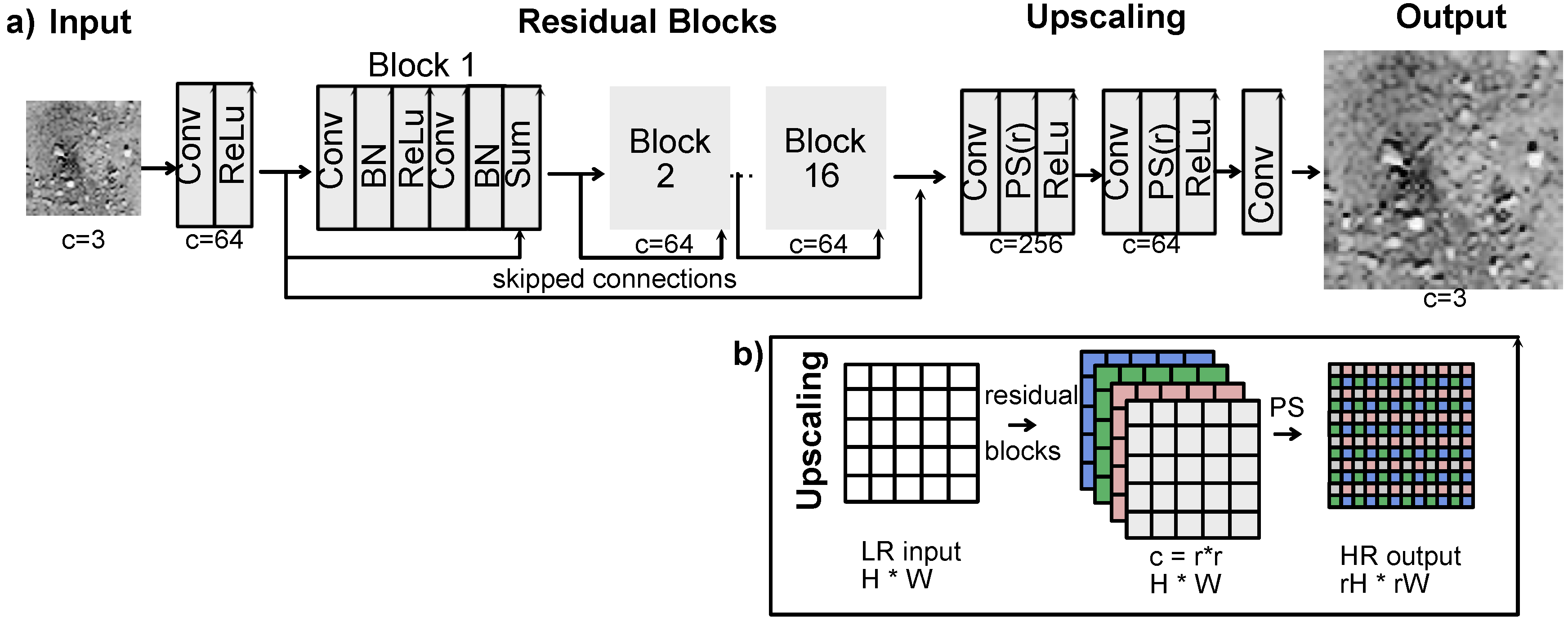
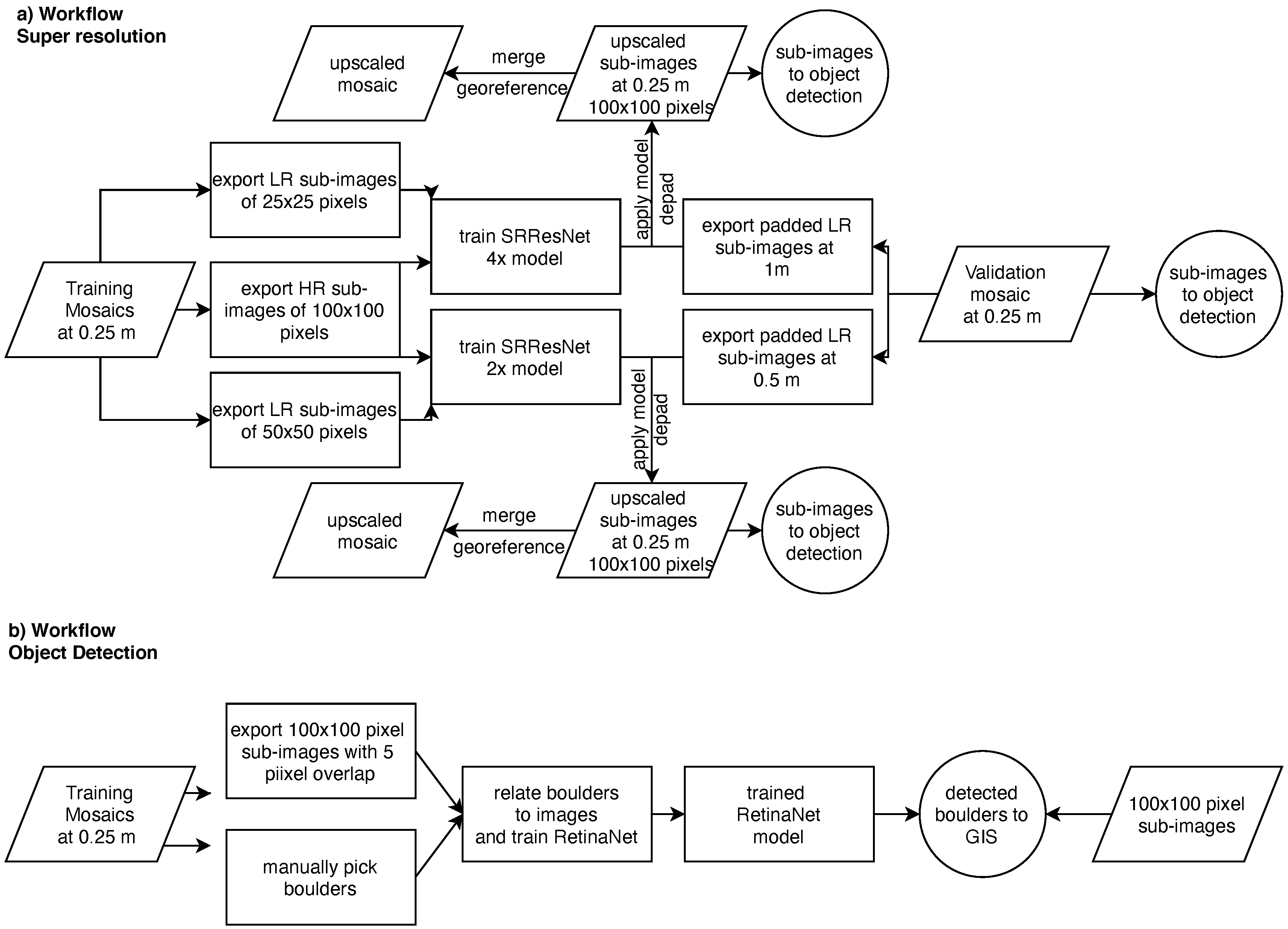
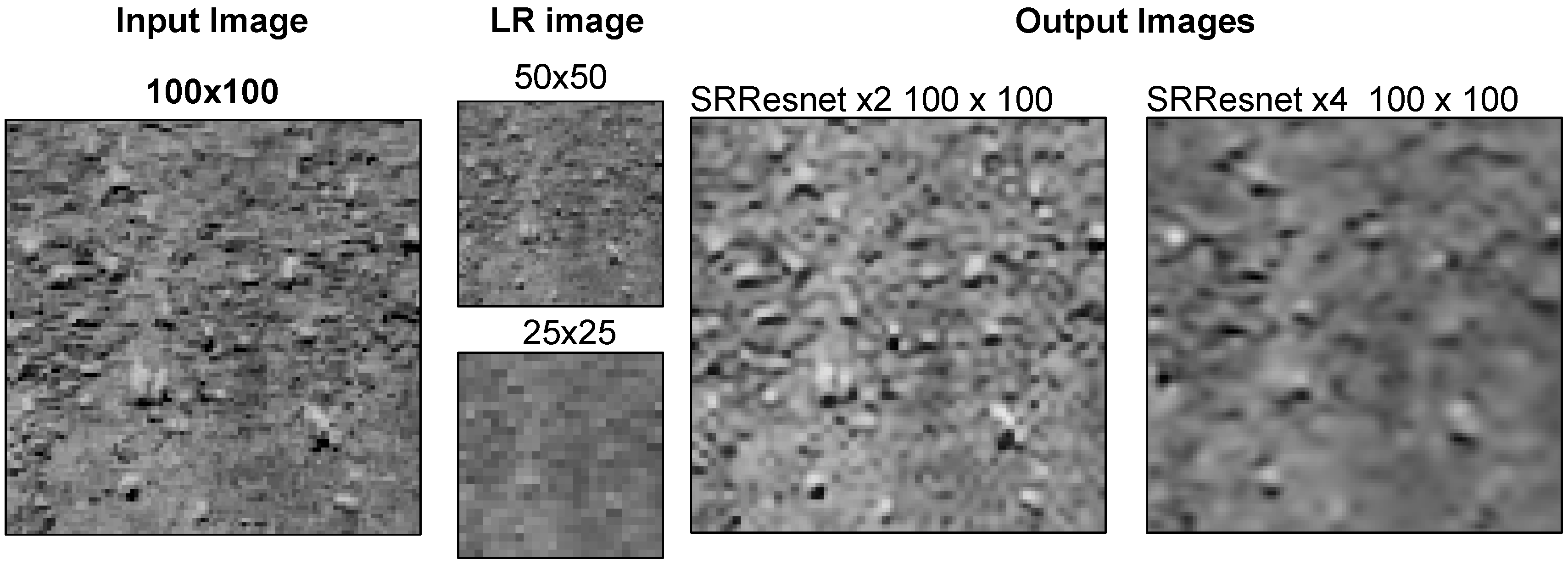
2.3. Image Super Resolution
2.4. Object Detection
2.4.1. Manual Object Detection
2.4.2. Automated Object Detection
3. Results
3.1. Grids of Boulder Density
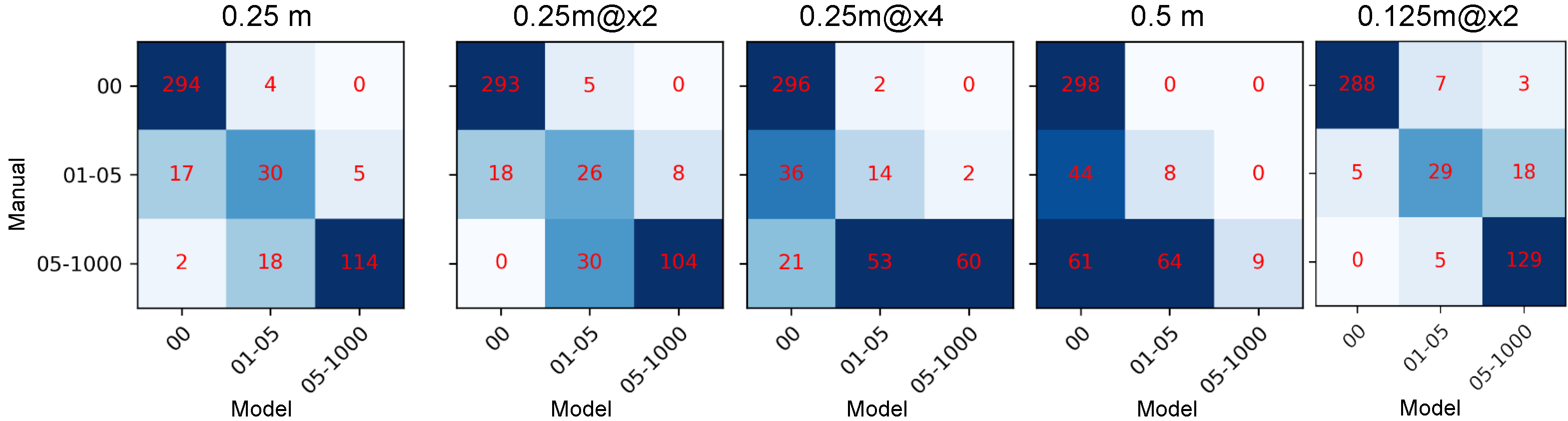
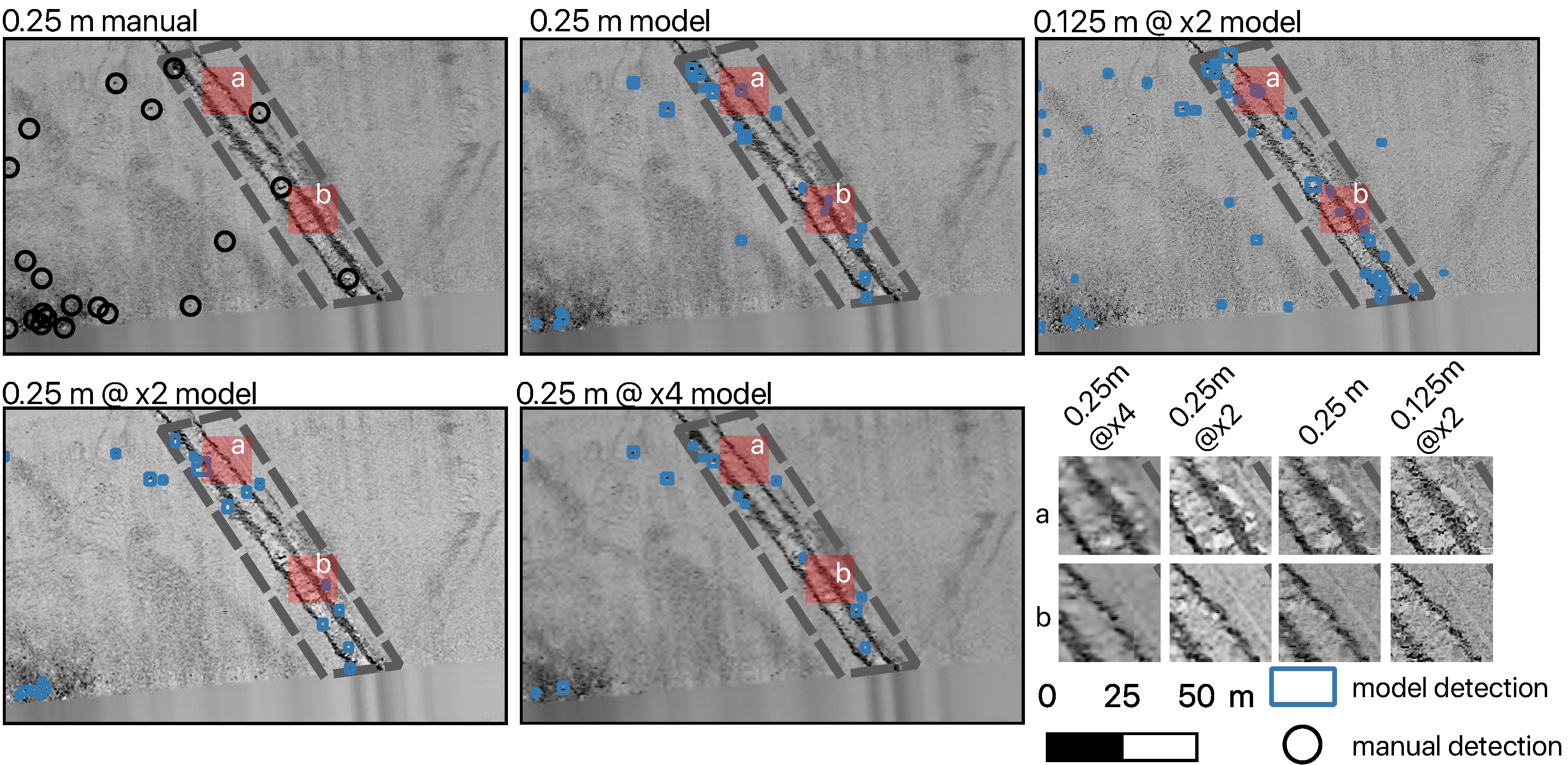
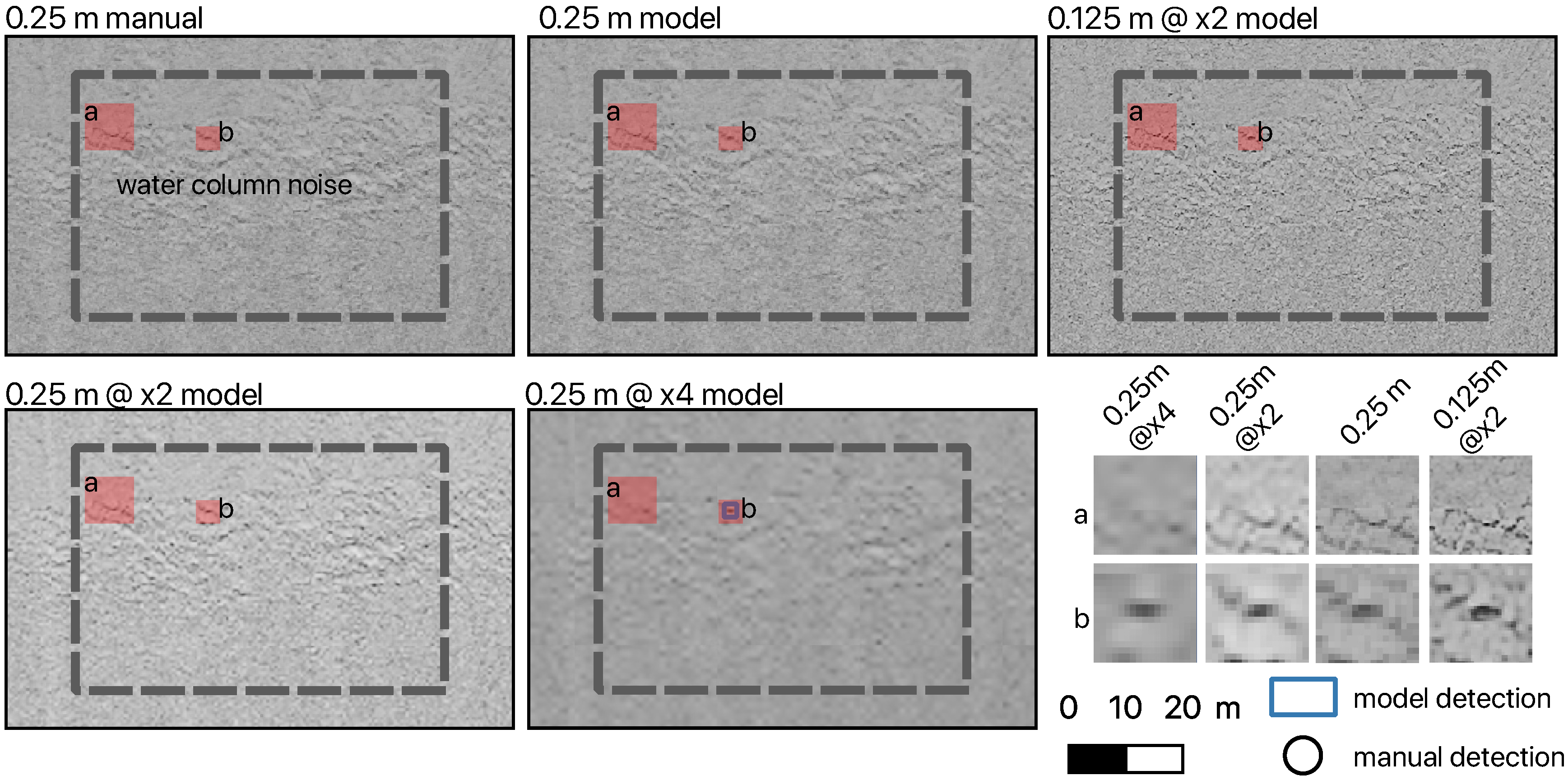
3.2. Boulder Detection Performance in Different Seafloor Facies
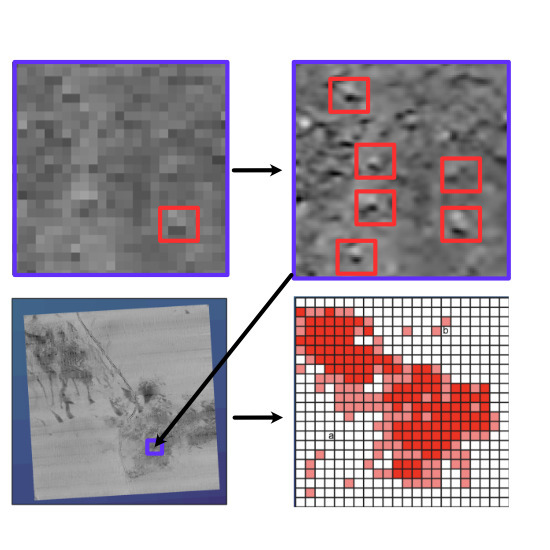
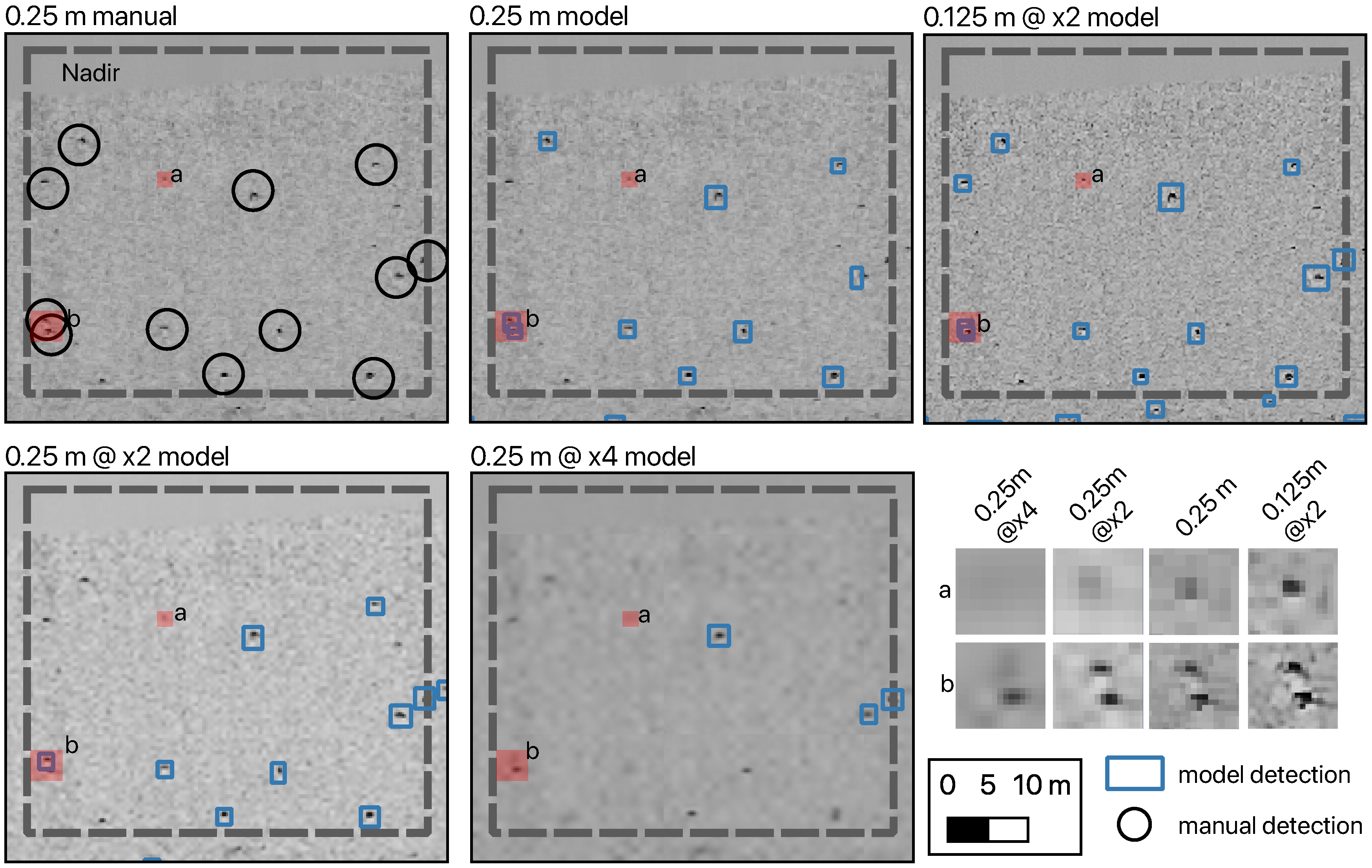
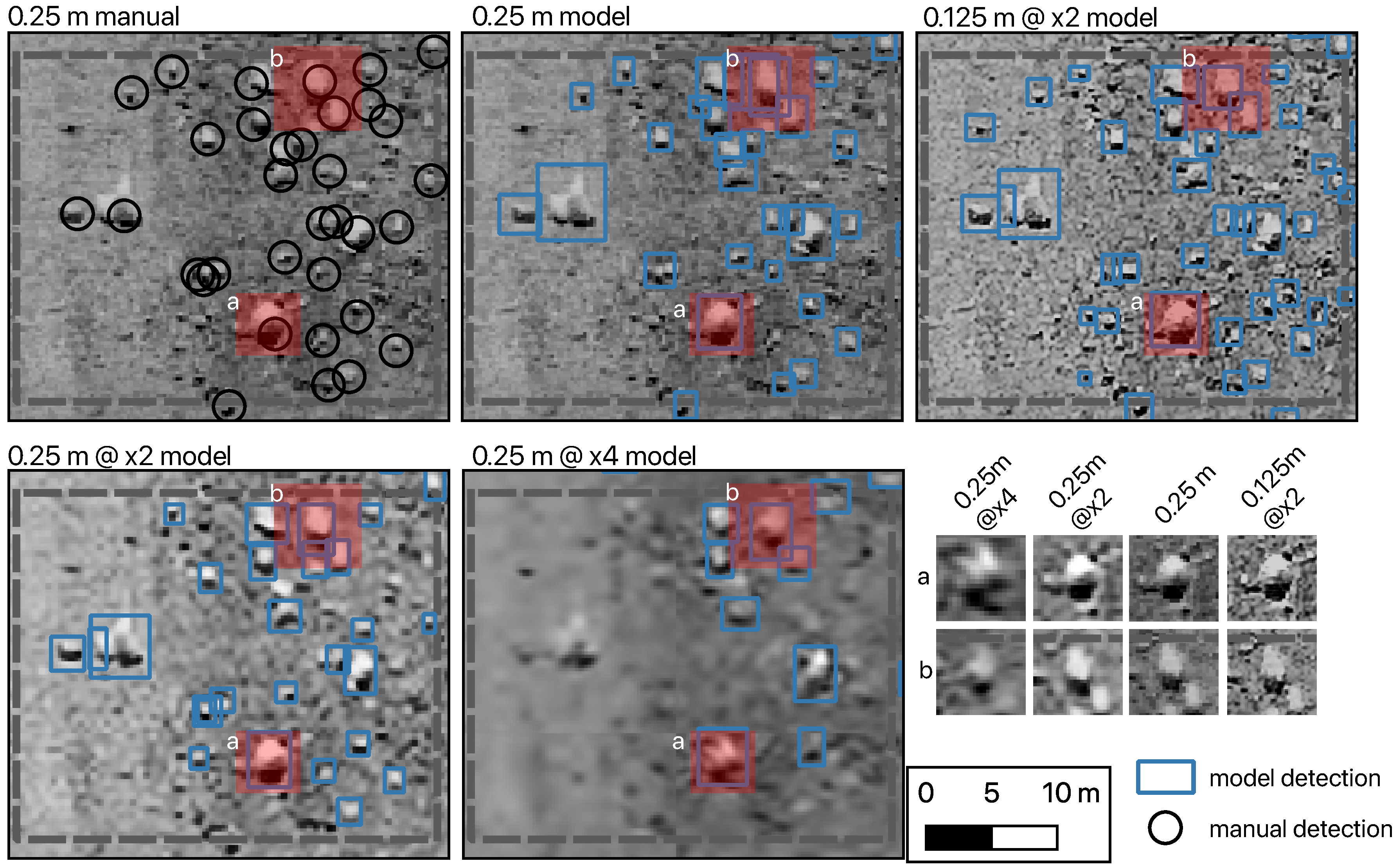
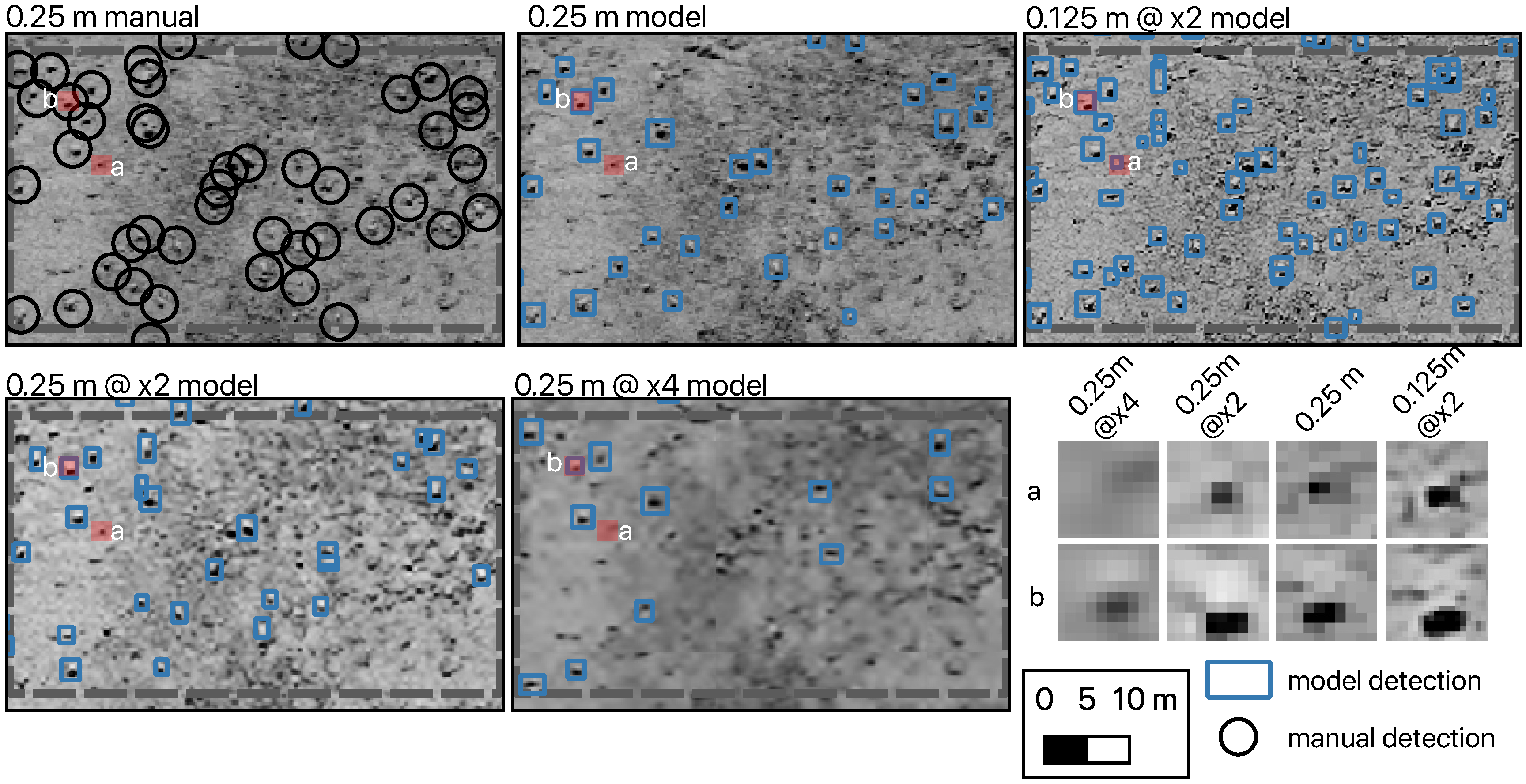
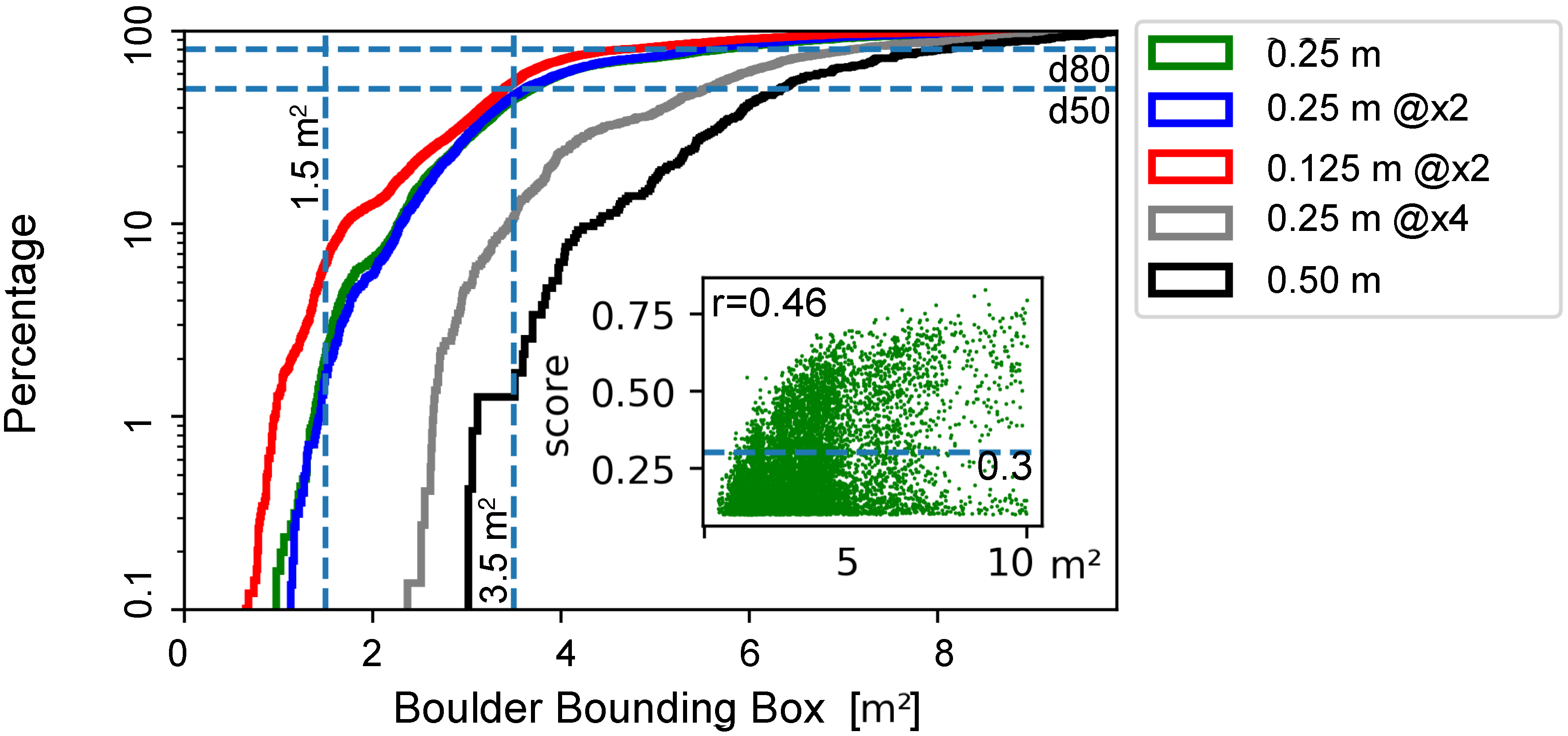
3.3. Small Object Detection
4. Discussion
4.1. Impact on Boulder Density Grids
4.2. Impact of Seafloor Facies
4.3. Impact on Small Object Detection
5. Conclusions
Supplementary Materials
Funding
Acknowledgments
Conflicts of Interest
References
- Anwar, S.; Khan, S.; Barnes, N. A Deep Journey into Super-resolution: A survey. ACM Comput. Surv. 2020, 53, 60:1–60:34. [Google Scholar] [CrossRef]
- Michaelis, R.; Hass, H.C.; Mielck, F.; Papenmeier, S.; Sander, L.; Ebbe, B.; Gutow, L.; Wiltshire, K.H. Hard-substrate habitats in the German Bight (South-Eastern North Sea) observed using drift videos. J. Sea Res. 2019, 144, 78–84. [Google Scholar] [CrossRef]
- Michaelis, R.; Hass, H.C.; Papenmeier, S.; Wiltshire, K.H. Automated Stone Detection on Side-Scan Sonar Mosaics Using Haar-Like Features. Geosciences 2019, 9, 216. [Google Scholar] [CrossRef]
- Papenmeier, S.; Hass, H.C. Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys. Geosciences 2018, 8, 279. [Google Scholar] [CrossRef]
- Papenmeier, S.; Darr, A.; Feldens, P.; Michaelis, R. Hydroacoustic Mapping of Geogenic Hard Substrates: Challenges and Review of German Approaches. Geosciences 2020, 10, 100. [Google Scholar] [CrossRef]
- Brown, C.J.; Blondel, P. Developments in the application of multibeam sonar backscatter for seafloor habitat mapping. Appl. Acoust. 2009, 70, 1242–1247. [Google Scholar] [CrossRef]
- Wei, B.; Zhou, T.; Li, H.; Xing, T.; Li, Y. Theoretical and experimental study on multibeam synthetic aperture sonar. J. Acoust. Soc. Am. 2019, 145, 3177. [Google Scholar] [CrossRef]
- Feldens, P.; Darr, A.; Feldens, A.; Tauber, F. Detection of Boulders in Side Scan Sonar Mosaics by a Neural Network. Geosciences 2019, 9, 159. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, C.; Xiao, S. Small Object Detection in Optical Remote Sensing Images via Modified Faster R-CNN. Appl. Sci. 2018, 8, 813. [Google Scholar] [CrossRef]
- Chen, X.; Andersen, T.J.; Morono, Y.; Inagaki, F.; Jørgensen, B.B.; Lever, M.A. Bioturbation as a key driver behind the dominance of Bacteria over Archaea in near-surface sediment. Sci. Rep. 2017, 7, 1–14. [Google Scholar] [CrossRef]
- Eggert, C.; Zecha, D.; Brehm, S.; Lienhart, R. Improving Small Object Proposals for Company Logo Detection. In Proceedings of the 2017 ACM on International Conference on Multimedia Retrieval—ICMR ‘17, Bucharest, Romania, 6–9 June 2017; pp. 167–174. [Google Scholar]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote. Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Yue, L.; Shen, H.; Li, J.; Yuan, Q.; Zhang, H.; Zhang, L. Image super-resolution: The techniques, applications, and future. Signal Process. 2016, 128, 389–408. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image Super-Resolution Using Deep Convolutional Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 295–307. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Hoi, S.C.H. Deep Learning for Image Super-resolution: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef]
- Liebel, L.; Körner, M. Single-Image Super Resolution For Multispectral Remote Sensing Data Using Convolutional Neural Networks. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2016, XLI-B3, 883–890. [Google Scholar] [CrossRef]
- Shermeyer, J.; Van Etten, A. The effects of super-resolution on object detection performance in satellite imagery. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Blondel, P. The Handbook of Sidescan Sonar; Springer: Berlin, Germany; New York, NY, USA; Chichester, UK, 2009; p. 316. [Google Scholar]
- Lurton, X.; Lamarche, G.; Brown, C.; Lucieer, V.; Rice, G.; Schimel, A.; Weber, T. Backscatter Measurements by Seafloor-Mapping Sonars Guidelines and Recommendations. 2015. Available online: http://geohab.org/wp-content/uploads/2018/09/BWSG-REPORT-MAY2015.pdf (accessed on 5 June 2020).
- Wilken, D.; Feldens, P.; Wunderlich, T.; Heinrich, C. Application of 2D Fourier filtering for elimination of stripe noise in side-scan sonar mosaics. Geo Mar. Lett. 2012, 32, 337–347. [Google Scholar] [CrossRef]
- Lamarche, G.; Lurton, X.; Verdier, A.L.; Augustin, J.M. Quantitative characterisation of seafloor substrate and bedforms using advanced processing of multibeam backscatter—Application to Cook Strait, New Zealand. Cont. Shelf Res. 2011, 31, S93–S109. [Google Scholar] [CrossRef]
- BSH. Guideline for Seafloor Mapping in German Marine Waters Using High-Resolution Sonars. BSH No. 7201. 2016, p. 147. Available online: https://www.bsh.de/DE/PUBLIKATIONEN/_Anlagen/Downloads/Meer_und_Umwelt/Weitere_Publikationen/Guideline-for-Seafloor-Mapping.html (accessed on 5 June 2020).
- Feldens, P.; Schwarzer, K. The Ancylus Lake stage of the Baltic Sea in Fehmarn Belt: Indications of a new threshold. Cont. Shelf Res. 2012, 35, 43–52. [Google Scholar] [CrossRef]
- Heinrich, C.; Anders, S.; Schwarzer, K. Late Pleistocene and early Holocene drainage events in the eastern Fehmarn Belt and Mecklenburg Bight, SW Baltic Sea. Boreas 2018, 47, 754–767. [Google Scholar] [CrossRef]
- Lemke, W.; Kuijpers, A.; Hoffmann, G.; Milkert, D.; Atzler, R. The Darss Sill, hydrographic threshold in the southwestern Baltic: Late Quaternary geology and recent sediment dynamics. Cont. Shelf Res. 1994, 14, 847–870. [Google Scholar] [CrossRef]
- Nielsen, E.P.; Jensen, J.; M, B.; Lomholt, S.; Kuijpers, A. Marine aggregates in the Danish sector of the Baltic Sea: Geological setting, exploitation potential and environmental assessment. Z. FüR Angew. Geol. 2004, NS2, 87–109. [Google Scholar]
- Ledig, C.; Theis, L.; Huszar, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4681–4690. [Google Scholar]
- Shi, W.; Caballero, J.; Huszár, F.; Totz, J.; Aitken, A.P.; Bishop, R.; Rueckert, D.; Wang, Z. Real-Time Single Image and Video Super-Resolution Using an Efficient Sub-Pixel Convolutional Neural Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1874–1883. [Google Scholar]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Aitken, A.; Ledig, C.; Theis, L.; Caballero, J.; Wang, Z.; Shi, W. Checkerboard artifact free sub-pixel convolution: A note on sub-pixel convolution, resize convolution and convolution resize. arXiv 2017, arXiv:1707.02937. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Zlocha, M.; Dou, Q.; Glocker, B. Improving RetinaNet for CT Lesion Detection with Dense Masks from Weak RECIST Labels. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Germany, 2019; pp. 402–410. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Beisiegel, K.; Darr, A.; Zettler, M.L.; Friedland, R.; Gräwe, U.; Gogina, M. Understanding the spatial distribution of subtidal reef assemblages in the southern Baltic Sea using towed camera platform imagery. Estuarine Coast. Shelf Sci. 2018, 207, 82–92. [Google Scholar] [CrossRef]
- Rönn, G.A.V.; Schwarzer, K.; Reimers, H.C.; Winter, C. Limitations of Boulder Detection in Shallow Water Habitats Using High-Resolution Sidescan Sonar Images. Geosciences 2019, 9, 390. [Google Scholar] [CrossRef]
- Terry, J.; Goff, J. Megaclasts: Proposed Revised Nomenclature At the Coarse End of the Udden-Wentworth Grain-Size Scale for Sedimentary Particles. J. Sediment. Res. 2014, 84, 192–197. [Google Scholar] [CrossRef]
- Michaelis, R.; Hass, H.C.; Mielck, F.; Papenmeier, S.; Sander, L.; Gutow, L.; Wiltshire, K.H. Epibenthic assemblages of hard-substrate habitats in the German Bight (south-eastern North Sea) described using drift videos. Cont. Shelf Res. 2019, 175, 30–41. [Google Scholar] [CrossRef]
- Diesing, M.; Schwarzer, K. Identification of submarine hard-bottom substrates in the German North Sea and Baltic Sea EEZ with high-resolution acoustic seafloor imaging. In Progress in Marine Conservation in Europe; Springer: Berlin/Heidelberg, Germany, 2006; pp. 111–125. [Google Scholar]
- Haldorsen, S. Grain-size distribution of subglacial till and its relstion to glacial crushing and abrasion. Boreas 1981, 10, 91–105. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mosaic | Boulder Count | Precision | Recall | F |
|---|---|---|---|---|
| Mosaic manual | 3170 | - | - | - |
| Mosaic 0.25 m resolution | 2704 | 0.82 | 0.80 | 0.81 |
| Mosaic 0.5 m resolution | 353 | 0.62 | 0.41 | 0.37 |
| Mosaic 0.125 m @ × 2 | 4593 | 0.85 | 0.83 | 0.84 |
| Mosaic 0.25 m @ × 2 | 2333 | 0.77 | 0.75 | 0.76 |
| Mosaic 0.25 m @ × 4 | 884 | 0.67 | 0.57 | 0.58 |
| Mosaic | Facies | Manual Count | Model Count | TP | FN | FP | Precision | Recall | F |
|---|---|---|---|---|---|---|---|---|---|
| Mosaic 0.25 m | isolated | 12 | 10 | 10 | 2 | 0 | 1.0 | 0.83 | 0.91 |
| Mosaic 0.25 m @ × 2 | isolated | 9 | 9 | 3 | 0 | 1.0 | 0.75 | 0.86 | |
| Mosaic 0.25 m @ × 4 | isolated | 3 | 3 | 9 | 0 | 1.0 | 0.25 | 0.4 | |
| Mosaic 0.125 m @ × 2 | isolated | 14 | 12 | 12 | 2 | 0 | 1.0 | 0.86 | 0.92 |
| Mosaic 0.25 m | large | 32 | 28 | 25 | 6 | 3 | 0.89 | 0.81 | 0.85 |
| Mosaic 0.25m @ × 2 | large | 26 | 22 | 11 | 4 | 0.85 | 0.67 | 0.75 | |
| Mosaic 0.25 m @ × 4 | large | 9 | 9 | 23 | 0 | 1.0 | 0.28 | 0.44 | |
| Mosaic 0.125 m @ × 2 | large | 55 | 35 | 34 | 21 | 1 | 0.97 | 0.64 | 0.77 |
| Mosaic 0.25 m | small | 42 | 29 | 28 | 14 | 1 | 0.97 | 0.67 | 0.82 |
| Mosaic 0.25 m @ × 2 | small | 26 | 23 | 19 | 3 | 0.88 | 0.55 | 0.68 | |
| Mosaic 0.25 m @ × 4 | small | 12 | 11 | 31 | 1 | 0.92 | 0.26 | 0.41 | |
| Mosaic 0.125 m @ × 2 | small | 82 | 59 | 54 | 28 | 5 | 0.92 | 0.66 | 0.77 |
| Mosaic 0.25 m | plough | 4 | 12 | 3 | 1 | 9 | 0.25 | 0.75 | 0.38 |
| Mosaic 0.25 m @ × 2 | plough | 12 | 3 | 1 | 9 | 0.25 | 0.75 | 0.38 | |
| Mosaic 0.25 m @ × 4 | plough | 10 | 3 | 1 | 7 | 0.3 | 0.75 | 0.43 | |
| Mosaic 0.125 m @ × 2 | plough | 5 | 29 | 3 | 2 | 26 | 0.10 | 0.6 | 0.17 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feldens, P. Super Resolution by Deep Learning Improves Boulder Detection in Side Scan Sonar Backscatter Mosaics. Remote Sens. 2020, 12, 2284. https://doi.org/10.3390/rs12142284
Feldens P. Super Resolution by Deep Learning Improves Boulder Detection in Side Scan Sonar Backscatter Mosaics. Remote Sensing. 2020; 12(14):2284. https://doi.org/10.3390/rs12142284
Chicago/Turabian StyleFeldens, Peter. 2020. "Super Resolution by Deep Learning Improves Boulder Detection in Side Scan Sonar Backscatter Mosaics" Remote Sensing 12, no. 14: 2284. https://doi.org/10.3390/rs12142284
APA StyleFeldens, P. (2020). Super Resolution by Deep Learning Improves Boulder Detection in Side Scan Sonar Backscatter Mosaics. Remote Sensing, 12(14), 2284. https://doi.org/10.3390/rs12142284