Global Forecast Impact of Low Data Latency Infrared and Microwave Sounders Observations from Polar Orbiting Satellites


Abstract
1. Introduction
2. Used NWP System and Data Setup with Data Latency
2.1. Global Forecast System (GFS)
2.2. Data setup of LEO IR and MW sounders
3. Trial Experiment Design
4. Results
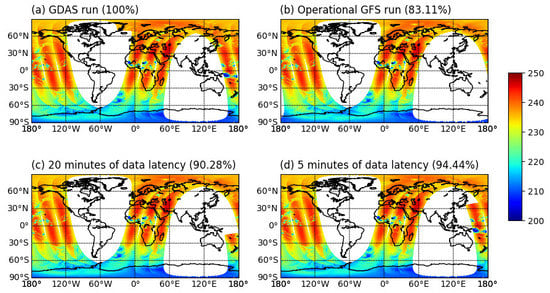
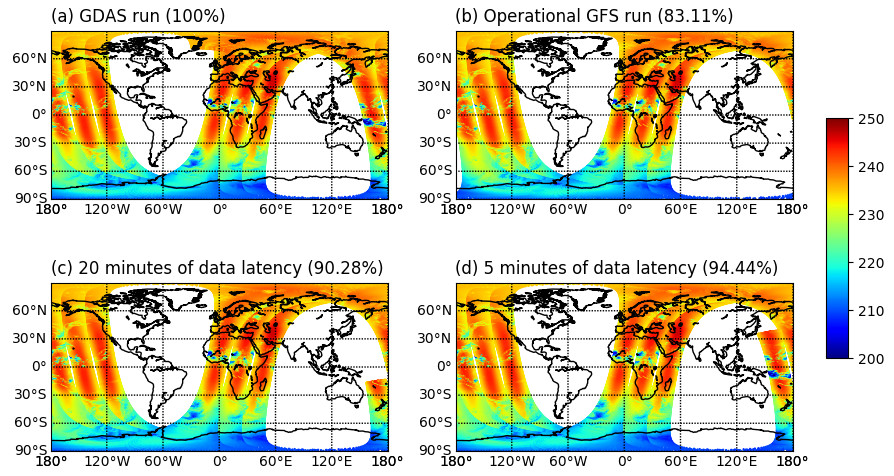
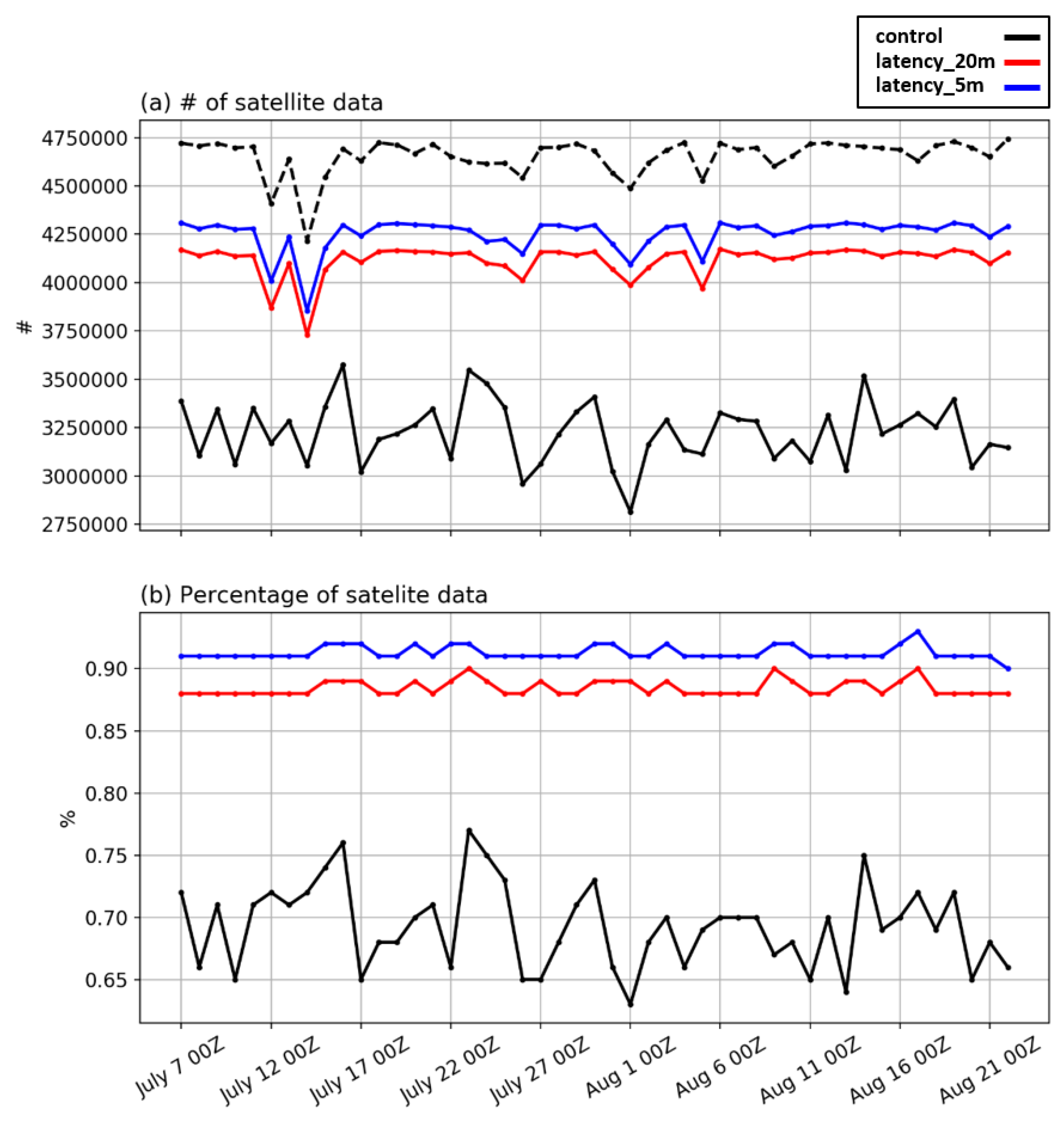
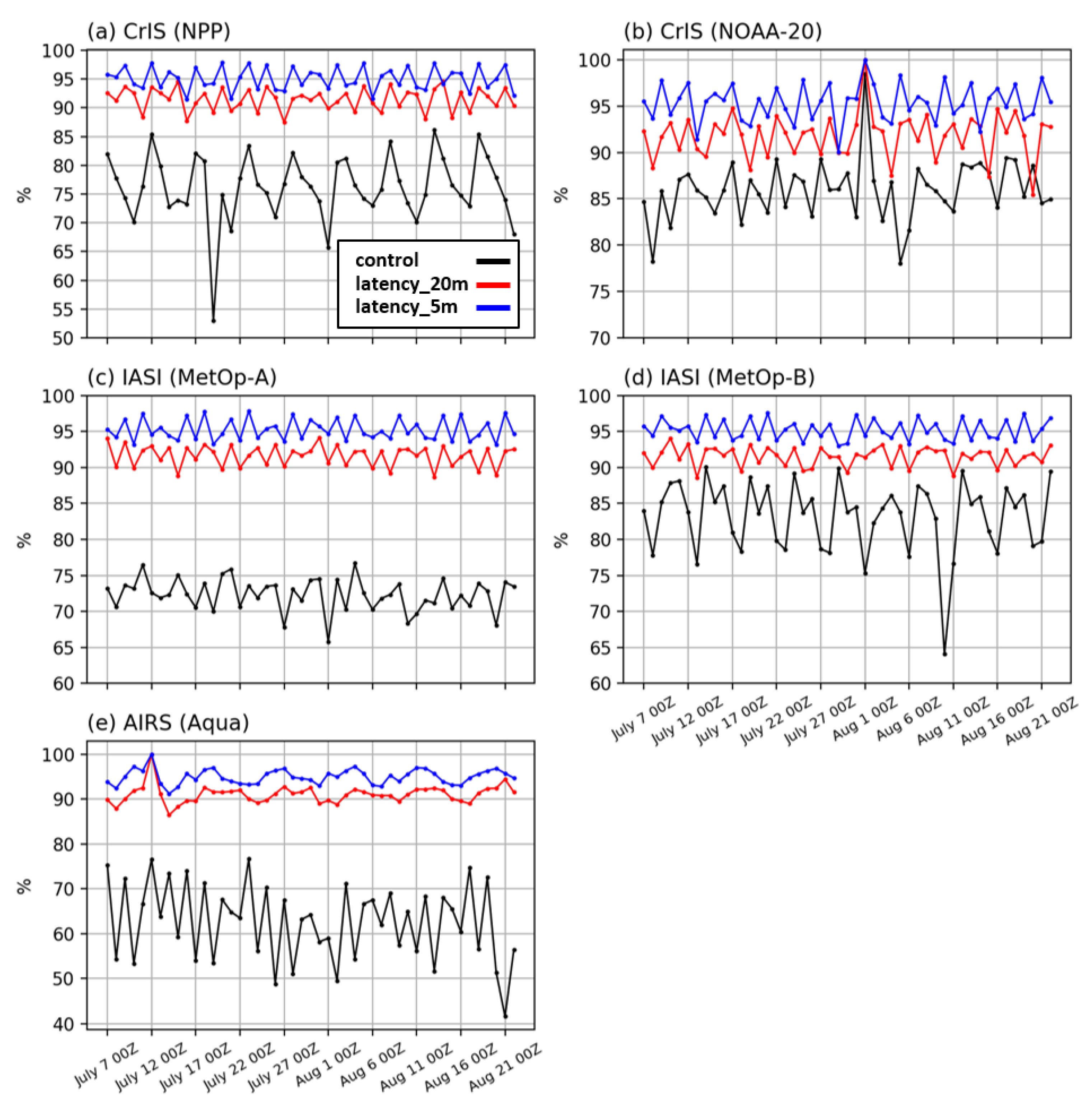
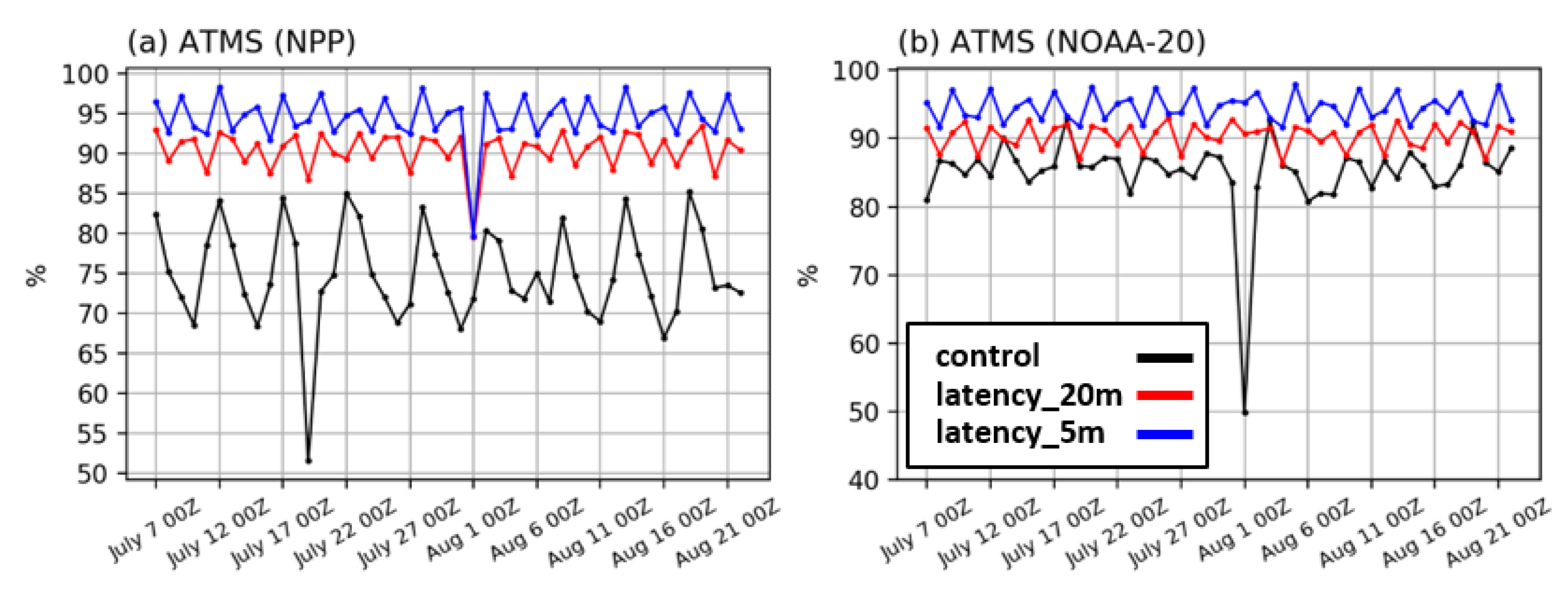
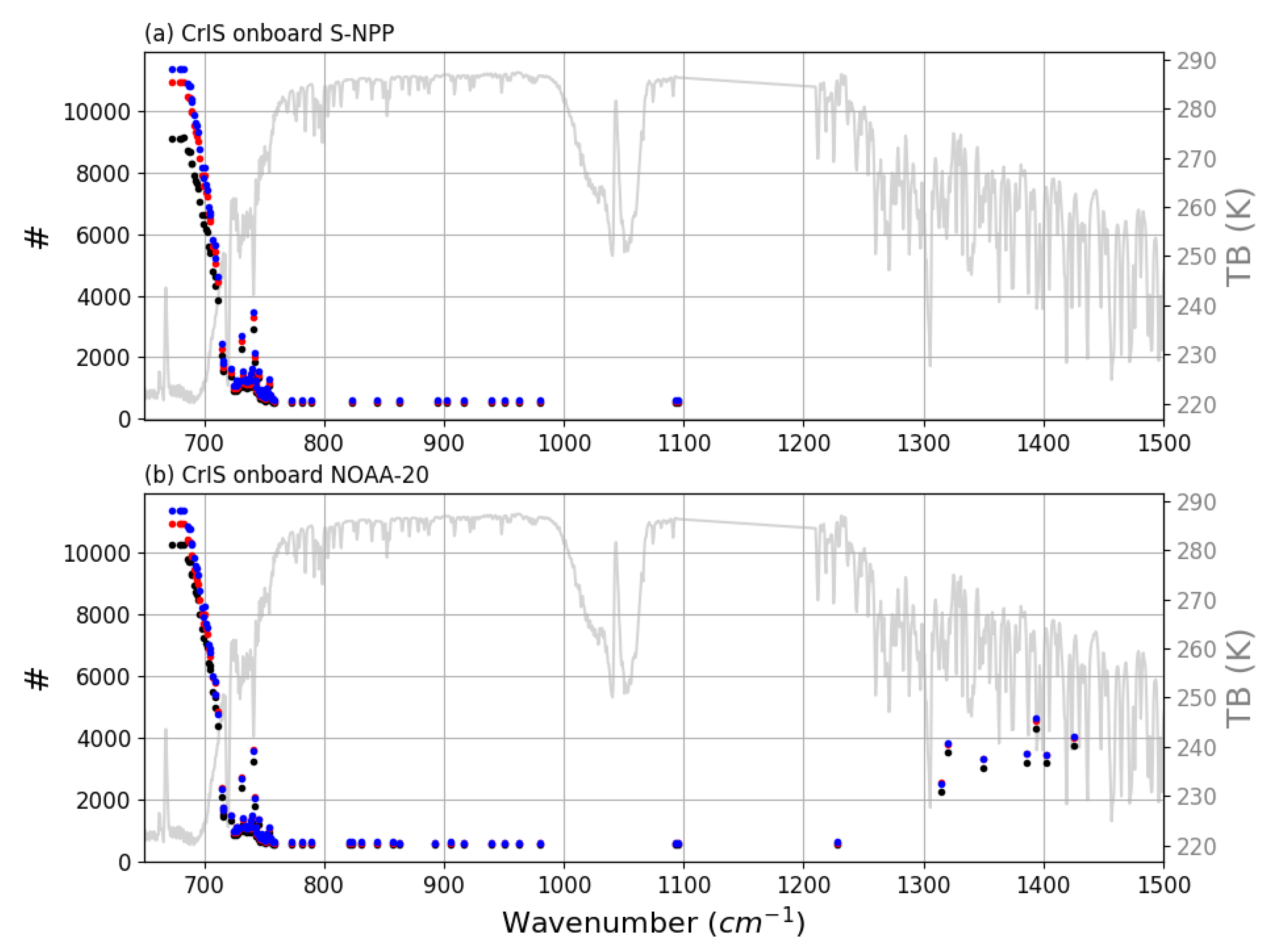
4.1. Comparison of LEO IR and MW Sounder Data Assimilated
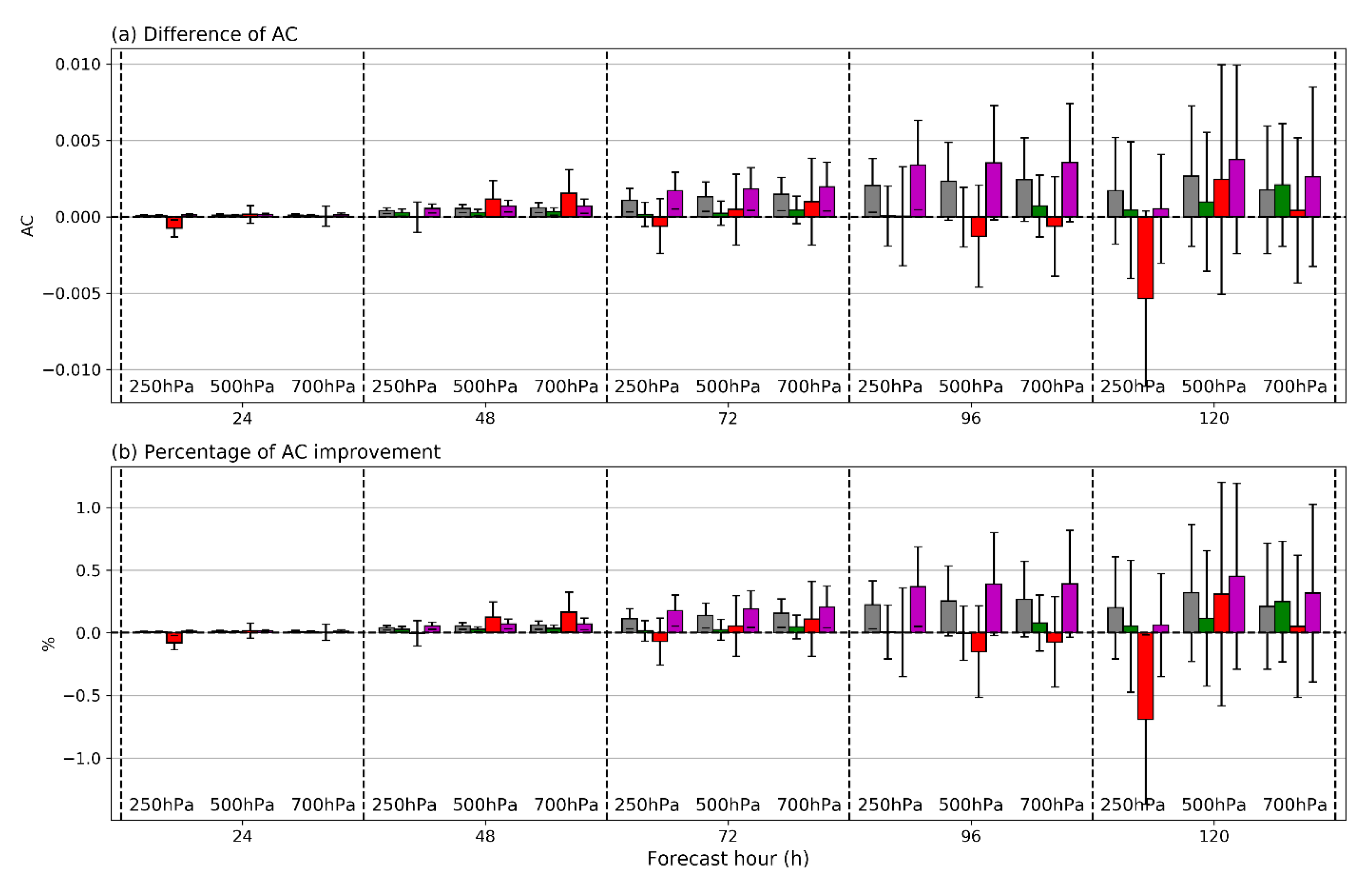
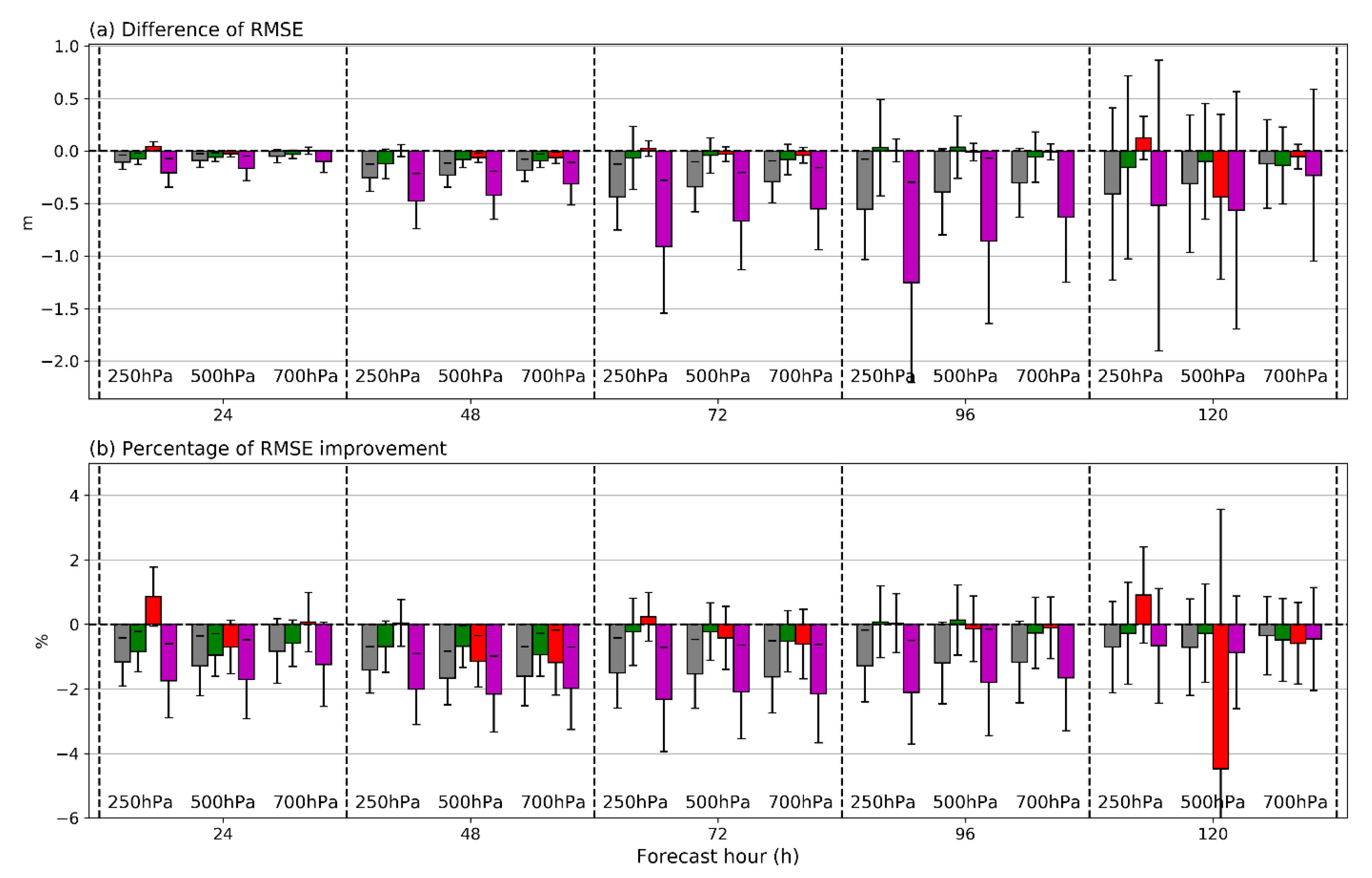
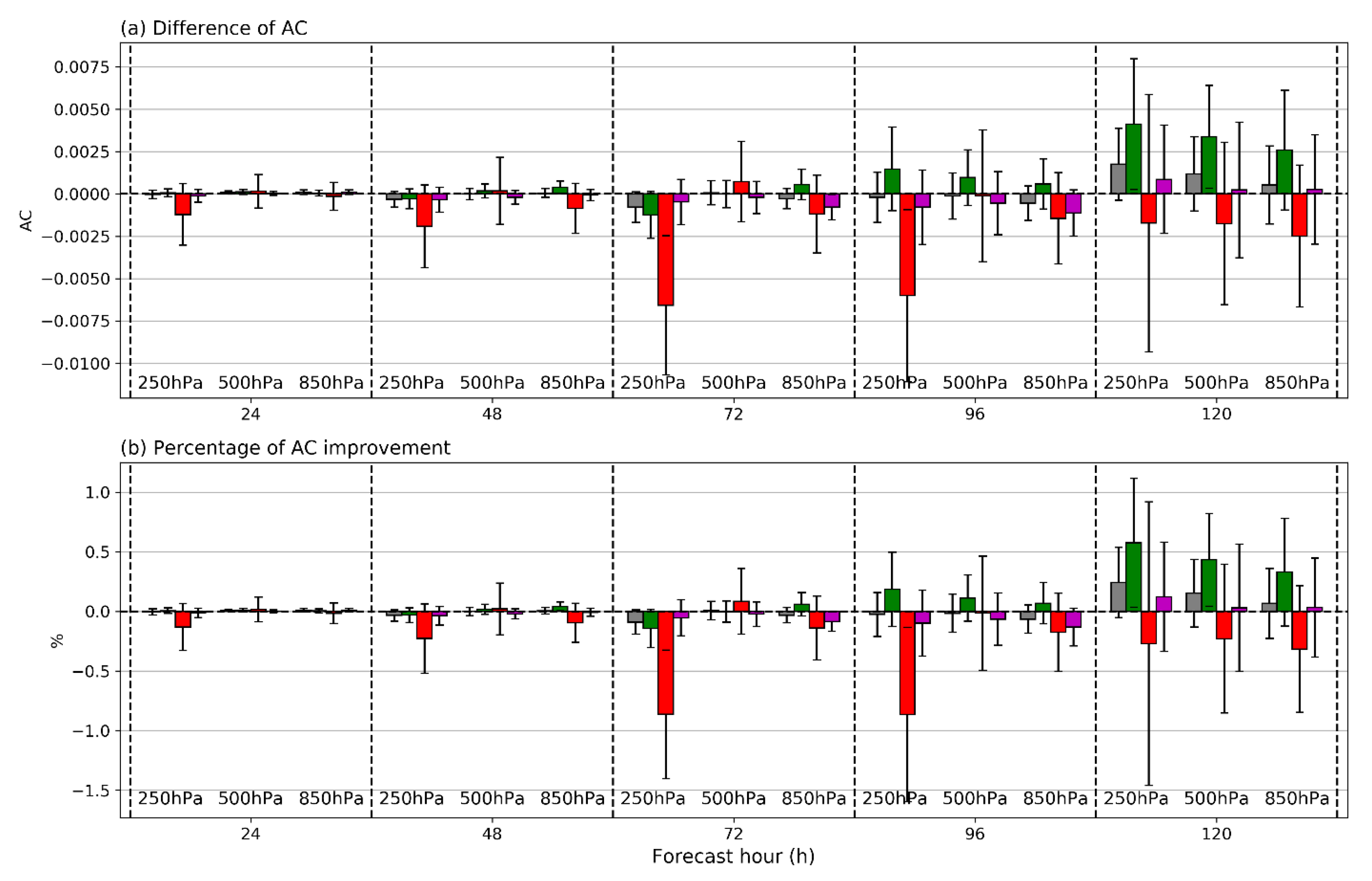
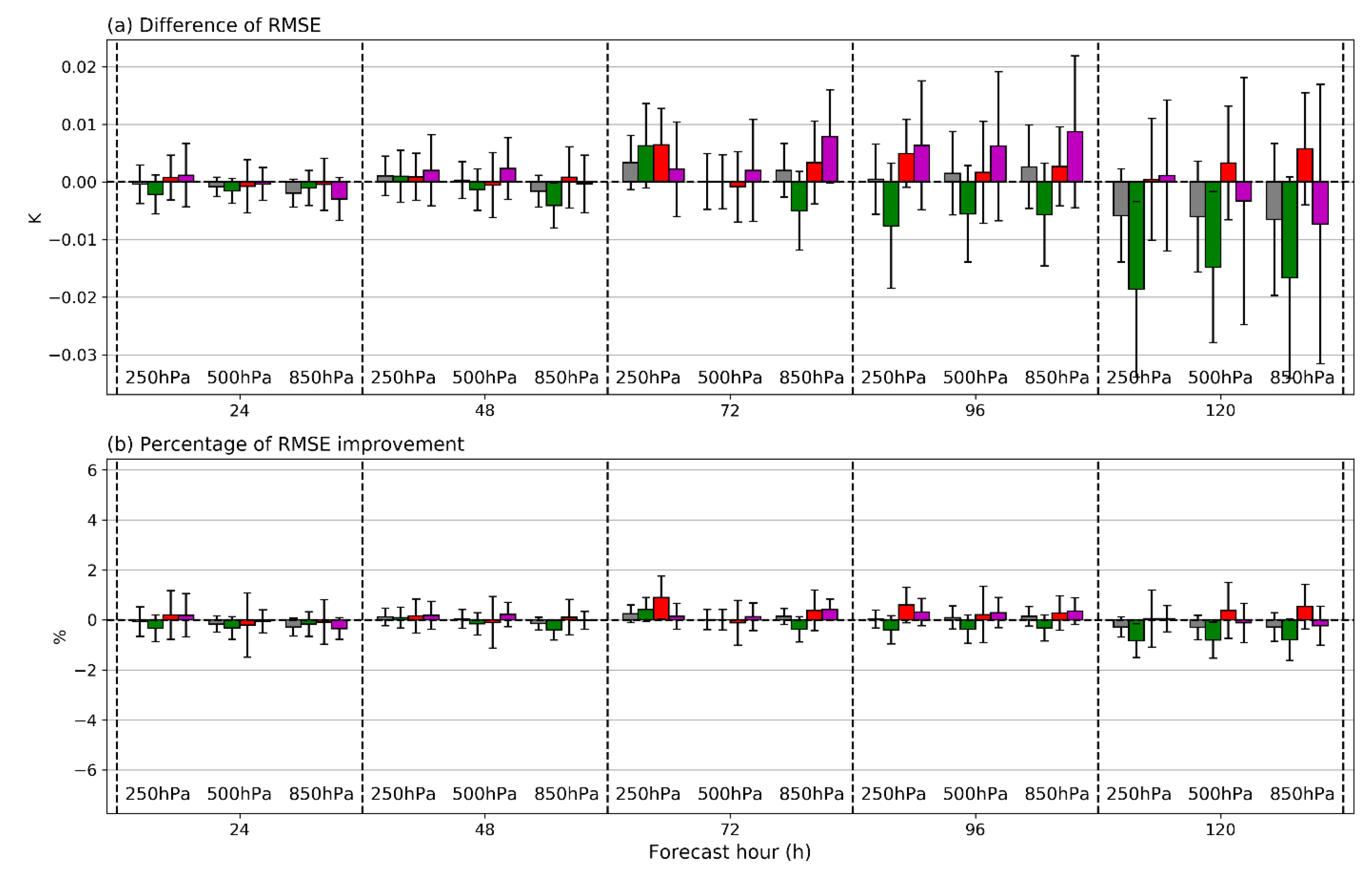
4.2. Assessment of Global Forecast Impact
5. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Glossary of Terminology and Abbreviations inTable 1 and Table 2 | |
| ABI | Advanced Baseline Imager |
| AIREP | Aircraft Report |
| AIRS | Atmospheric Infrared Sounder |
| AMDAR | Aircraft Meteorological Data Relay |
| AMI | Advanced Meteorological Imager |
| AMSU-A | Advanced Microwave Sounding Unit-A |
| AMV | Atmospheric Motion Vector |
| ATMS | Advanced Technology Microwave Sounder |
| ATOVS | Advanced TIROS Operational Vertical Sounder |
| Aqua | Satellite in EOS series |
| AVHRR | Advanced Very High-Resolution Radiometer |
| BOGUS | Bogus observations generated by national meteorological centers |
| COSMIC | Constellation Observing System for Meteorology Ionosphere and Climate |
| CrIS | Cross-track Infrared Sounder |
| DMSP | Defense Meteorological Satellite Program |
| EOS | Earth Observing System |
| EUMETSAT | European Organization for the Exploitation of Meteorological Satellites |
| GEO | Geosynchronous-orbiting (satellite) |
| GOES | Geostationary Operational Environmental Satellite |
| GPSRO | Global Positioning System Radio Occultation |
| GRAS | GNSS Receiver for Atmospheric Sounding |
| EUMETSAT | European Organization for the Exploitation of Meteorological Satellites |
| GEO | Geosynchronous-orbiting (satellite) |
| GOES | Geostationary Operational Environmental Satellite |
| GPSRO | Global Positioning System Radio Occultation |
| GRAS | GNSS Receiver for Atmospheric Sounding |
| Himawari | Geostationary satellite operated by JMA |
| HIRS | High Resolution Infrared Radiation Sounder |
| IASI | Infrared Atmospheric Sounding Interferometer |
| JMA | Japan Meteorological Agency |
| LEO | Low-Earth orbiting (satellite) |
| METAR | Meteorological Aerodrome Report |
| MetOp | Meteorological Operational satellite series operated by EUMETSAT |
| MHS | Microwave Humidity Sounder |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| NEXRAD | Next Generation Weather Radar |
| NOAA | National Oceanic and Atmospheric Administration |
| PIBAL | Pilot balloon (Upper-level wind observation) |
| S-NPP | Suomi National Polar-orbiting Partnership |
| SAR | Synthetic Aperture Radar |
| SSMIS | Special Sensor Microwave Imager/Sounder |
| TanDEM-X | German SAR Earth observation satellite |
| Terra | Satellite in EOS series |
| TerraSAR-X | German SAR Earth observation satellite |
References
- Zapotocny, T.H.; Jung, J.A.; Le Marshall, J.F.; Treadon, R.E. A two-season impact study of satellite and in situ data in the NCEP Global Data Assimilation System. Weather Forecast. 2007, 22, 887–909. [Google Scholar] [CrossRef]
- Joo, S.; Eyre, J.; Marriott, R. The impact of MetOp and other satellite data within the Met Office global NWP system using an adjoint-based sensitivity method. Mon. Weather Rev. 2013, 141, 3331–3342. [Google Scholar] [CrossRef]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Hilton, F.; Atkinson, N.C.; English, S.J.; Eyre, J.R. Assimilation of IASI at the Met Office and assessment of its impact through observing system experiments. Q. J. R. Meteorol. Soc. 2009, 135, 495–505. [Google Scholar] [CrossRef]
- Wang, P.; Li, J.; Li, Z.; Lim, A.H.N.; Li, J.; Schmit, T.J.; Goldberg, M.D. The impact of Cross-track Infrared Sounder (CrIS) cloud-cleared radiances on Hurricane Joaquin (2015) and Matthew (2016) forecasts. J. Geophys. Res. Atmos. 2017, 122, 13201–13218. [Google Scholar] [CrossRef]
- Menzel, W.P.; Schmit, T.J.; Zhang, P.; Li, J. Satellite based atmospheric infrared sounder development and applications. Bull. Am. Meteorol. Soc. 2018, 99, 583–603. [Google Scholar] [CrossRef]
- Kim, S.-M.; Kim, H.M. Forecast sensitivity observation impact in the 4DVAR and hybrid-4DVAR data assimilation systems. J. Atmos. Ocean. Technol. 2019, 36, 1563–1575. [Google Scholar] [CrossRef]
- Migliorini, S.; Candy, B. All-sky satellite data assimilation of microwave temperature sounding channels at the Met Office. Q. J. R. Meteorol. Soc. 2019, 145, 867–883. [Google Scholar] [CrossRef]
- WMO Guide to the Direct Broadcast Network for Near-real-time Relay of Low Earth Orbit Satellite Data: Attachment to the Guide to the WMO Information System (WMO-No. 1061). Available online: https://library.wmo.int/doc_num.php?explnum_id=4135 (accessed on 26 May 2020).
- Lin, H.; Weygandt, S.; Benjamin, S.; Hu, M. Satellite radiance data assimilation with the hourly updated rapid refresh. Weather Forecast. 2017, 32, 1273–1287. [Google Scholar] [CrossRef]
- Gumley, L.; Goldberg, M.; Flynn, B.; Santek, D. NOAA Direct Broadcast Real-Time Network (DBRTN): Advanced infrared and microwave sounder data from polar orbiting satellites for numerical weather prediction (NWP) and other time-sensitive applications. In Proceedings of the 2018 AGU Fall Meeting, Washington, DC, USA, 10–14 December 2018. [Google Scholar]
- Goldberg, M. NOAA Direct Broadcast Data Initiative to Meet NWP Latency Requirements. CGMS-41 NOAA-WP-13. Available online: https://www.cgms-info.org/documents/documents-cgms/2067741.pdf (accessed on 26 May 2020).
- Wang, P.; Li, J.; Schmit, T.J. The impact of low latency satellite sounder observations on local severe storm forecasts in regional NWP. Sensors 2020, 20, 650. [Google Scholar] [CrossRef] [PubMed]
- Diaz, S.W.; Casey, S.P.F.; Cucurull, L. Impact of satellite data latency on global weather forecasts. In Proceedings of the 2020 AMS Annual Meeting, Boston, MA, USA, 12–15 January 2020. [Google Scholar]
- Yang, F.; Pan, H.-L.; Krueger, S.K.; Moorthi, S.; Lord, S.J. Evaluation of the NCEP global forecast system at the ARM SGP site. Mon. Weather Rev. 2006, 134, 3668–3690. [Google Scholar] [CrossRef]
- Wang, X.; Parrish, D.; Kleist, D.; Whitaker, J. GSI 3DVarbased ensemble-variational hybrid data assimilation for NCEP global forecast system: Single-resolution experiments. Mon. Weather Rev. 2013, 141, 4098–4117. [Google Scholar] [CrossRef]
- Kleist, D.T.; Ide, K. An OSSE-based evaluation of hybrid variational-ensemble data assimilation for the NCEP GFS. Part II: 4DEnVar and hybrid variants. Mon. Weather Rev. 2015, 143, 452–470. [Google Scholar] [CrossRef]
- Ma, Z.; Maddy, E.S.; Zhang, B.; Zhu, T.; Boukabara, S.A. Impact assessment of Himawari-8 AHI data assimilation in NCEP GDAS/GFS with GSI. J. Atmos. Ocean. Technol. 2017, 34, 797–815. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, Y.; Hou, D.; Luo, Y.; Peng, J.; Wobus, R. Performance of the new NCEP Global Ensemble Forecast System in a parallel experiment. Weather Forecast. 2017, 32, 1989–2004. [Google Scholar] [CrossRef]
- Tallapragada, V. Recent updates to NCEP Global Modeling Systems: Implementation of FV3 based Global Forecast System (GFS v15.1) and plans for implementation of Global Ensemble Forecast System (GEFSv12). In Proceedings of the 2019 AGU Fall Meeting, San Francisco, MD, USA, 9–13 December 2019. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observation Type | Atmospheric Parameter |
|---|---|
| Rawinsonde and Dropsonde | Temperature, humidity, and wind profiles |
| PIBAL and Wind profiler | Wind profile |
| Ground radar (NEXRAD) | Wind and precipitation |
| Wind profiler | Wind profile |
| Land surface (METAR) | Surface pressure |
| Ship and Buoy | Temperature, humidity, and surface pressure |
| Aircraft (AIREP and AMDAR) | Wind |
| BOGUS | Wind of tropical cyclone |
| Observation Type | Instrument | Platform |
|---|---|---|
| Infrared sounder (LEO) | CrIS | S-NPP and NOAA-20 |
| IASI | MetOp-A and MetOp-B | |
| AIRS | Aqua | |
| Microwave sounder (LEO) | ATMS | S-NPP and NOAA-20 |
| AMSU-A | NOAA-15, NOAA-18, NOAA-19, MetOp-A, and Aqua | |
| MHS | NOAA-18, NOAA-19, MetOp-A, and MetOp-B | |
| GPSRO bending angle (LEO) | GPS sensor | COSMIC, TerraSAR-X, and TanDEM-X |
| GRAS | MetOp-A and MetOp-B | |
| AMV (GEO) | Imager | GOES-15 |
| AHI | Himawari-8 | |
| AMV (LEO) | MODIS | Aqua and Terra |
| VIIRS | S-NPP | |
| AVHRR | MetOp-A, MetOp-B, NOAA-15, NOAA-18, and NOAA-19 | |
| Sea surface wind (LEO) | ASCAT | MetOp-A and MetOp-B |
| Microwave imager (LEO) | SSMIS | DMSP-17 |
| Infrared sounder (GEO) | Sounder | GOES-15 |
| Radiometer (LEO) | AVHRR | NOAA-18 and MetOp-A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, Y.-C.; Lim, A.H.N.; Huang, H.-L.; Goldberg, M.D. Global Forecast Impact of Low Data Latency Infrared and Microwave Sounders Observations from Polar Orbiting Satellites. Remote Sens. 2020, 12, 2193. https://doi.org/10.3390/rs12142193
Noh Y-C, Lim AHN, Huang H-L, Goldberg MD. Global Forecast Impact of Low Data Latency Infrared and Microwave Sounders Observations from Polar Orbiting Satellites. Remote Sensing. 2020; 12(14):2193. https://doi.org/10.3390/rs12142193
Chicago/Turabian StyleNoh, Young-Chan, Agnes H. N. Lim, Hung-Lung Huang, and Mitchell D. Goldberg. 2020. "Global Forecast Impact of Low Data Latency Infrared and Microwave Sounders Observations from Polar Orbiting Satellites" Remote Sensing 12, no. 14: 2193. https://doi.org/10.3390/rs12142193
APA StyleNoh, Y.-C., Lim, A. H. N., Huang, H.-L., & Goldberg, M. D. (2020). Global Forecast Impact of Low Data Latency Infrared and Microwave Sounders Observations from Polar Orbiting Satellites. Remote Sensing, 12(14), 2193. https://doi.org/10.3390/rs12142193