Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China

 ,
,  and
and
Abstract
1. Introduction
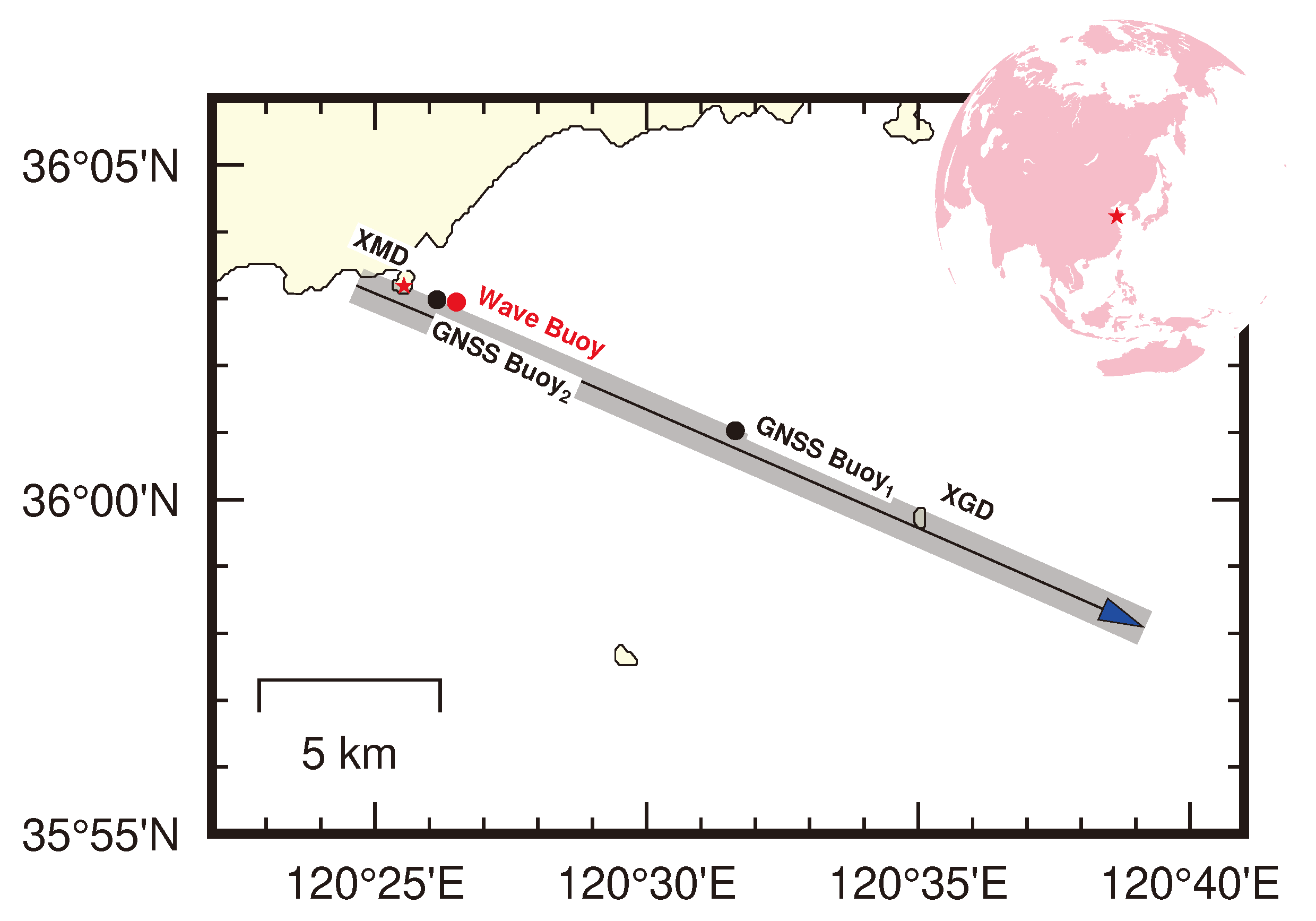
2. Basic Description of the Validation Campaign
3. The AIRAS and in Situ Data
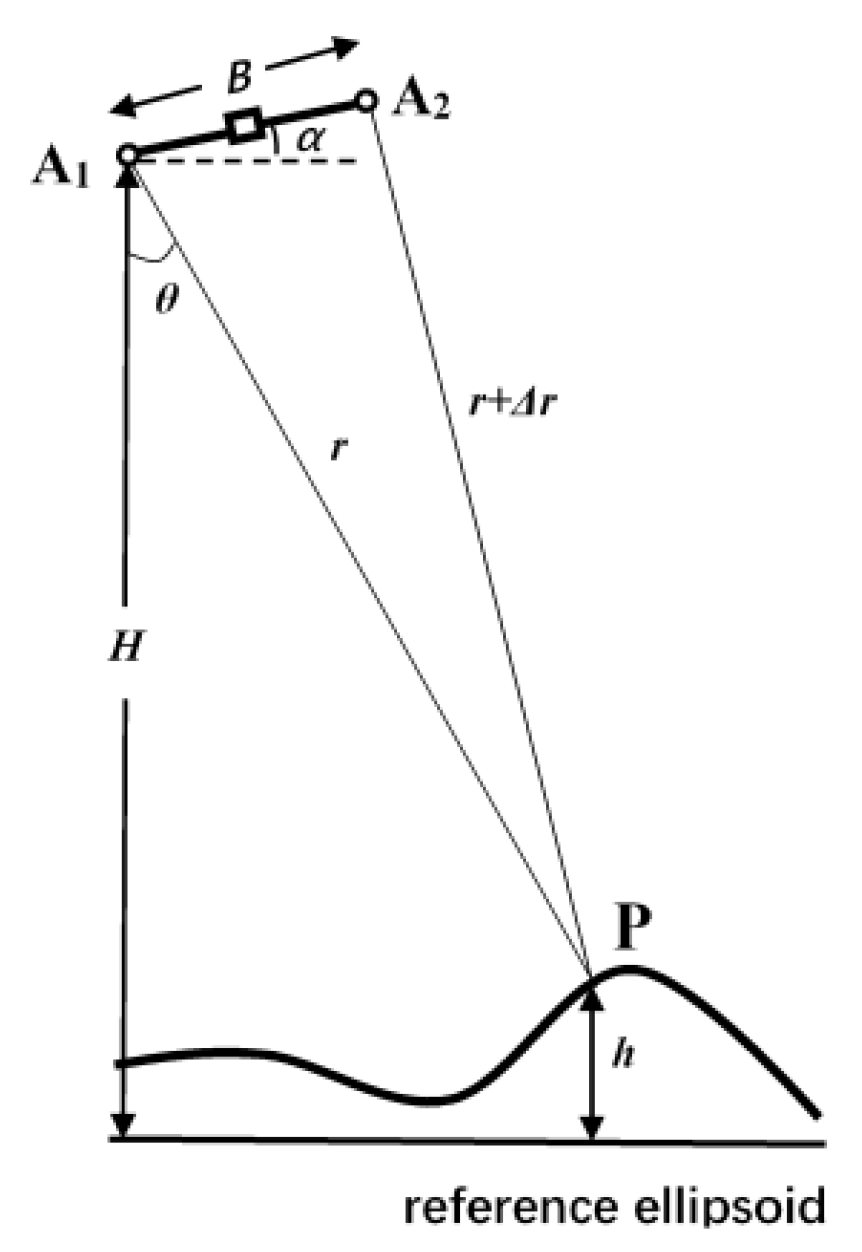
3.1. The Principle of AIRAS Measurements
3.2. The AIRAS Sea Surface Height Determination
3.3. In Situ Data
3.4. The GNSS Data: Ambiguity Resolution and Processing
3.5. Estimates of the Relative Sea Surface Height Difference
4. Methodology
4.1. Validation of Sea Surface Height Difference
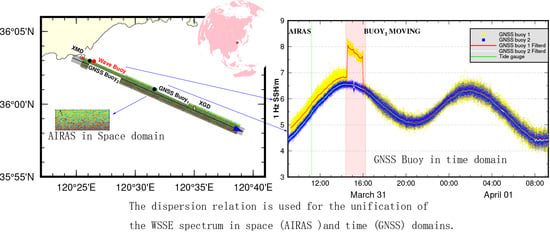
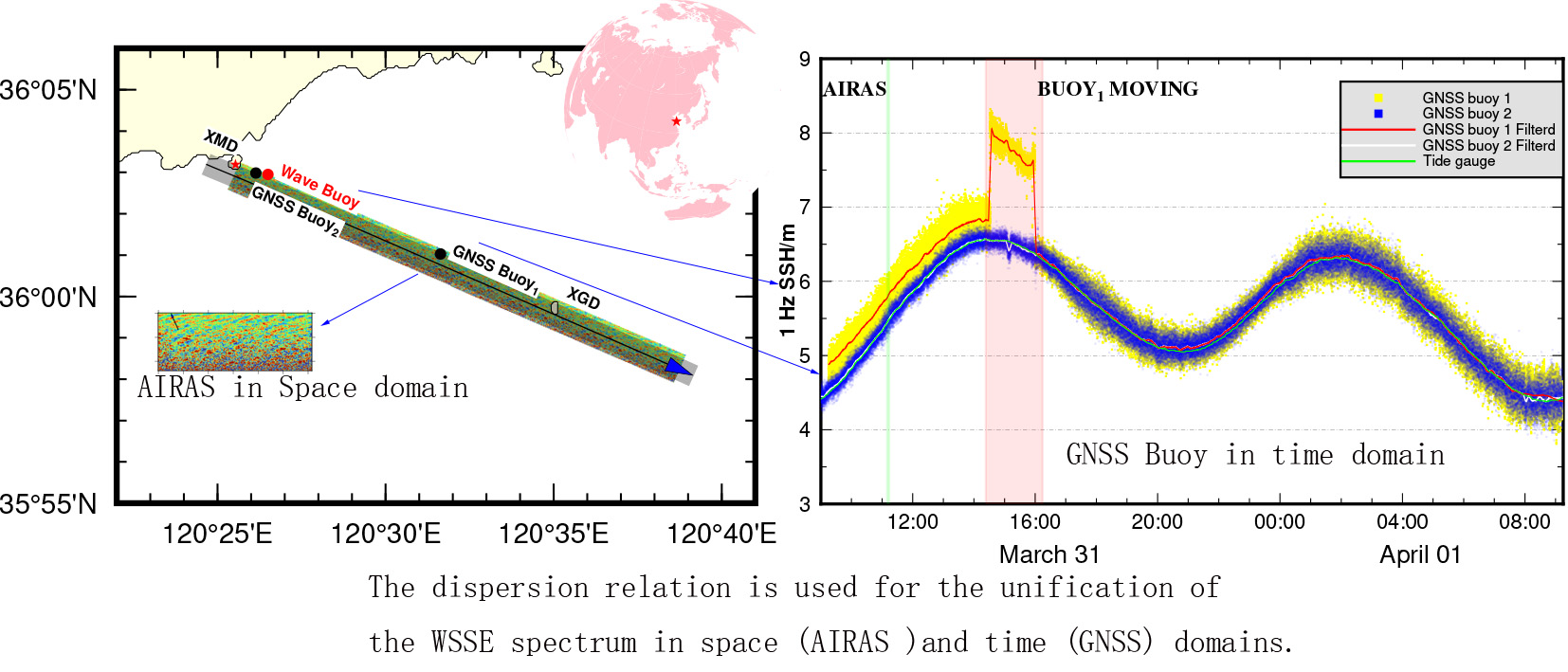
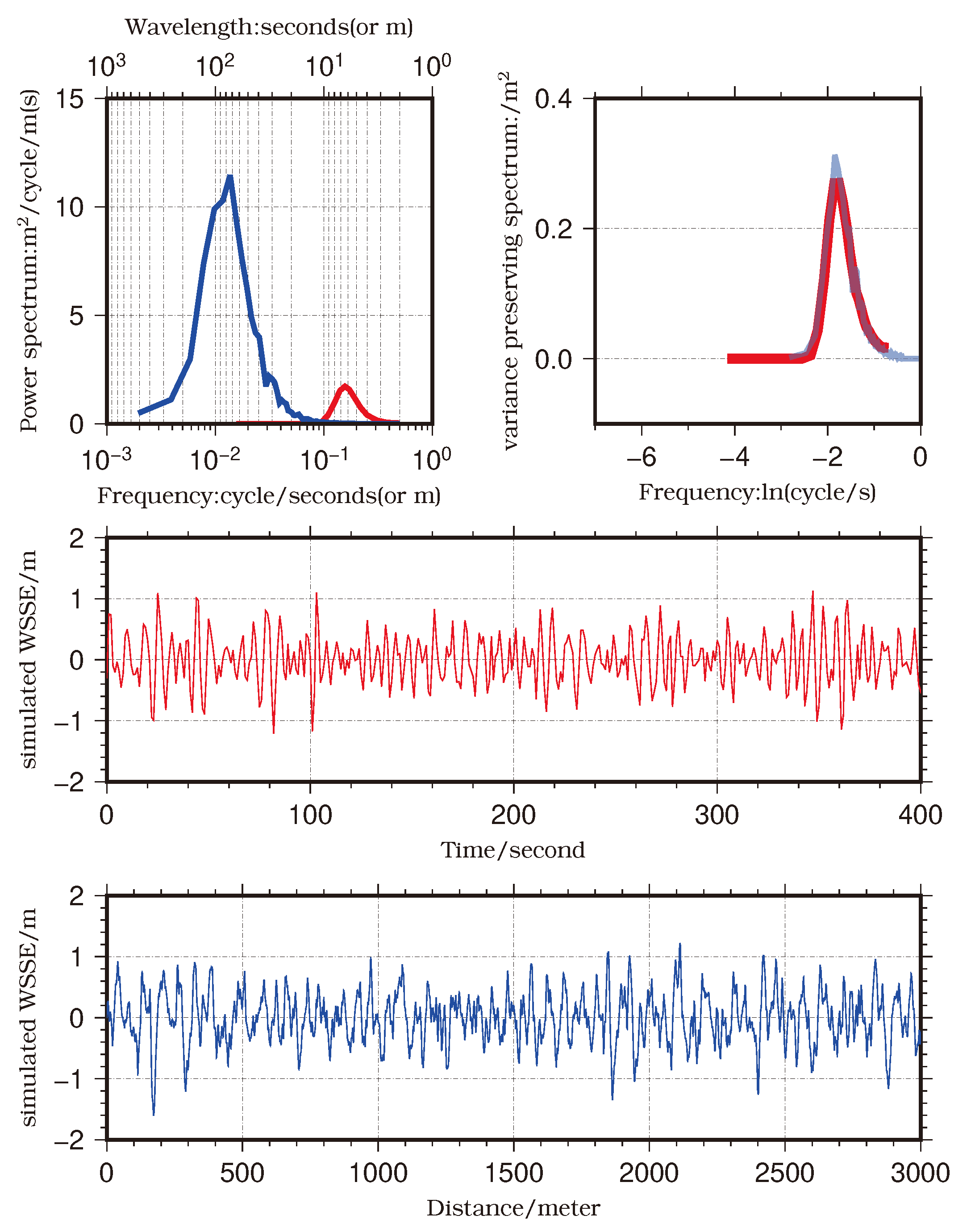
4.2. Validation of Wave-Induced Sea Surface Elevation
- (1)
- If the time series of the measured sea surface elevation is sufficiently long, the variance of the sea surface elevation measured at any place within the domain is the same (i.e., no place is different).
- (2)
- If the area of the measured sea surface elevation is sufficiently large, the variance of the sea surface elevation measured at any time within the domain is the same (i.e., no time is different).
- (3)
- If statements (1) and (2) are true, the WSSE is a uniform field in space and time, and the variances of (1) and (2) are equal.
5. Results
5.1. Simulated WSSE
5.2. Sea Surface Height Difference Between Validation Locations
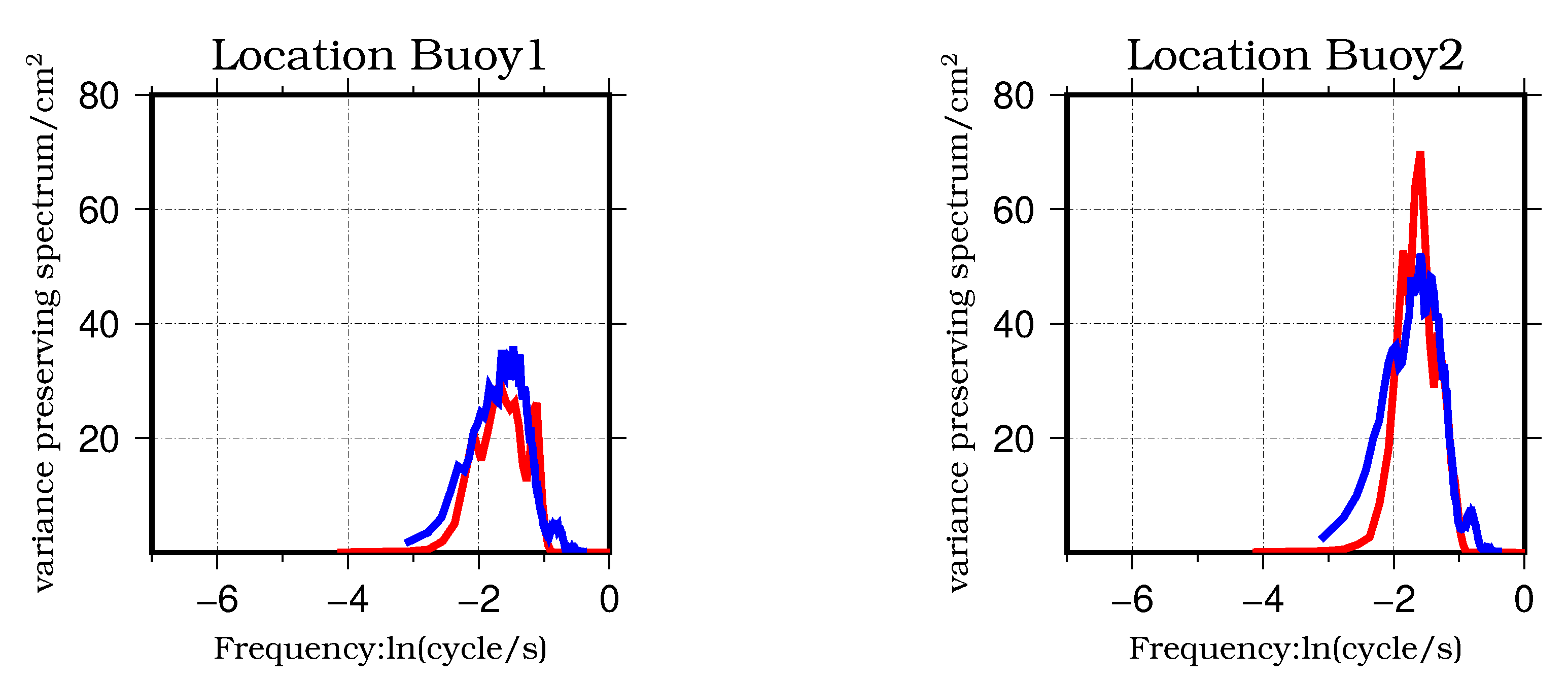
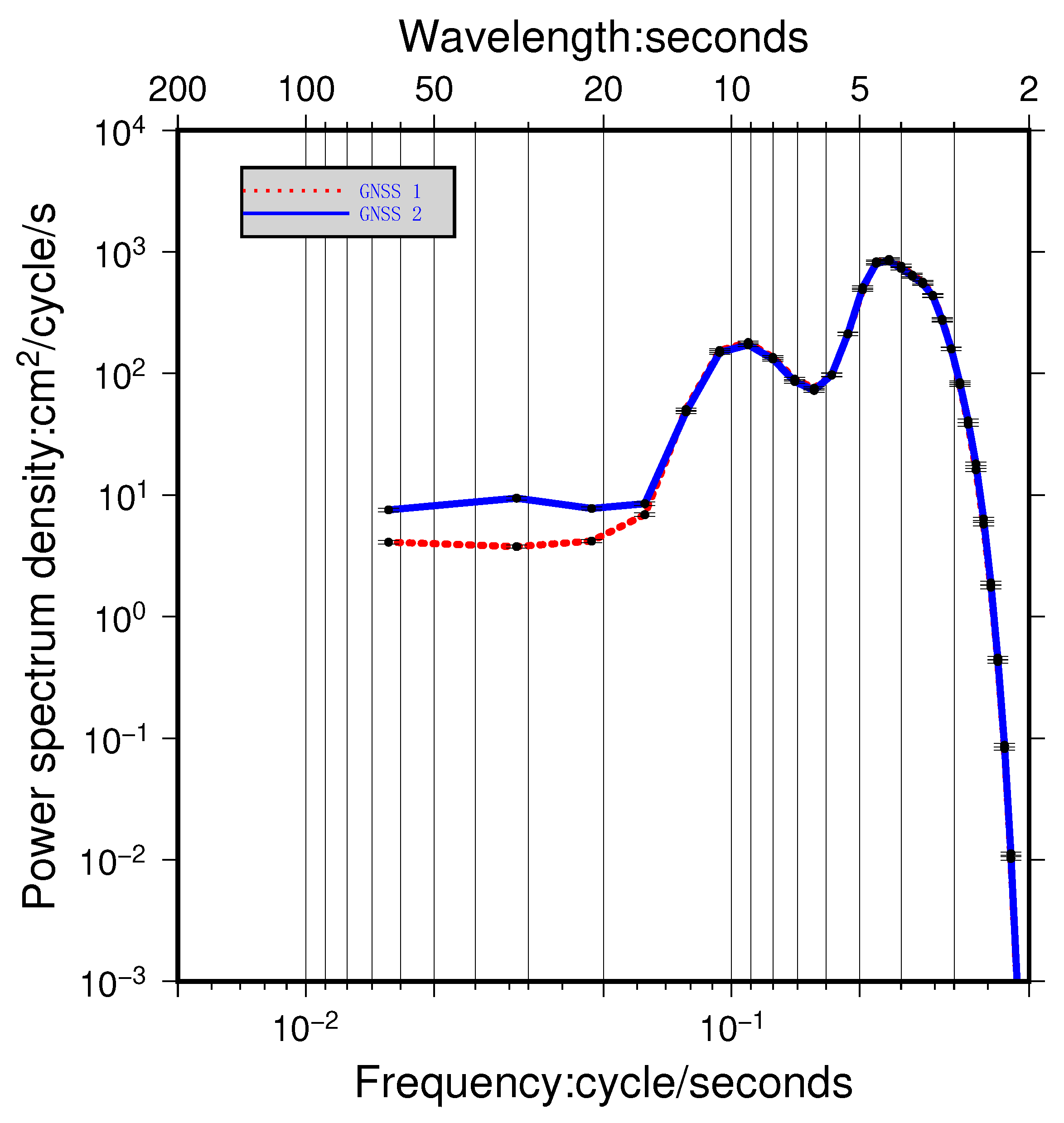
5.3. Spectrum Validation of the Wave-Induced Sea Surface Elevation
6. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| AIRAS | Airborne Interferometric Radar Altimeter System |
| Cal/Val | Calibration/Validation |
| PSD | Power Spectrum Density |
| VPS | Variance-Preserving Spectrum |
| SSH | Sea Surface Height |
| WSSE | Wind-induced Sea Surface Elevation |
| SWH | Significant Wave Height |
| SWOT | Surface Water and Ocean Topography |
| PPK | Post-Processing Kinetic |
Appendix A. Power Spectrum Density Estimation

Appendix B. Unification of Power Spectrum Density in the Time and Space Domains
References
- Fu, L.L.; Haines, B.J. The challenges in long-term altimetry calibration for addressing the problem of global sea level change. Adv. Space Res. 2013, 51, 1284–1300. [Google Scholar] [CrossRef]
- Haines, B.J.; Desai, S.D.; Born, G.H. The Harvest Experiment: Calibration of the Climate Data Record from TOPEX/Poseidon, Jason-1 and the Ocean Surface Topography Mission. Mar. Geod. 2010, 33, 91–113. [Google Scholar] [CrossRef]
- Haines, B.J.; Dong, D.; Born, G.H.; Gill, S.K. The Harvest Experiment: Monitoring Jason-1 and TOPEX/POSEIDON from a California Offshore Platform Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 239–259. [Google Scholar] [CrossRef]
- Ménard, Y.; Jeansou, E.; Vincent, P. Calibration of the TOPEX/POSEIDON altimeters at Lampedusa: Additional results at Harvest. J. Geophys. Res. Ocean. (1978–2012) 1994, 99, 24487–24504. [Google Scholar] [CrossRef]
- Christensen, E.J.; Haines, B.J.; Keihm, S.J.; Morris, C.S.; Norman, R.A.; Purcell, G.H.; Williams, B.G.; Wilson, B.D.; Born, G.H.; Parke, M.E.; et al. Calibration of TOPEX/POSEIDON at Platform Harvest. J. Geophys. Res. Ocean. 1994, 99, 24465–24485. [Google Scholar] [CrossRef]
- Bonnefond, P.; Laurain, O.; Exertier, P.; Boy, F.; Guinle, T.; Picot, N.; Labroue, S.; Raynal, M.; Donlon, C.; Féménias, P.; et al. Calibrating the SAR SSH of Sentinel-3A and CryoSat-2 over the Corsica Facilities. Remote Sens. 2018, 10, 92. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Ménard, Y.; Orsoni, A.; Jeansou, E.; Haines, B.J.; Kubitschek, D.G.; Born, G. Leveling the Sea Surface Using a GPS-Catamaran Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 319–334. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guillot, A.; Picot, N.; Cancet, M.; Lyard, F. SARAL/AltiKa Absolute Calibration from the Multi-Mission Corsica Facilities. Mar. Geod. 2015, 38, 171–192. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Jan, G. Absolute calibration of Jason-1 and Jason-2 altimeters in Corsica during the formation flight phase. Mar. Geod. 2010, 33, 80–90. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Ménard, Y.; Orsoni, A.; Jan, G.; Jeansou, E. Absolute Calibration of Jason-1 and TOPEX/Poseidon Altimeters in Corsica Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 261–284. [Google Scholar] [CrossRef]
- Mertikas, S.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Kokolakis, C.; Tziavos, I.N.; Vergos, G.; et al. Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece. Remote Sens. 2018, 10, 1808. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, G.; Vuilleumier, P.; Cullen, R.; Féménias, P.; Tripolitsiotis, A. An Action Plan Towards Fiducial Reference Measurements for Satellite Altimetry. Remote Sens. 2019, 11, 1993. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; Vergos, G.; Guinle, T. Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sens. 2018, 10, 1557. [Google Scholar] [CrossRef]
- Watson, C.; White, N.; Church, J.; Burgette, R.; Tregoning, P.; Coleman, R. Absolute Calibration in Bass Strait, Australia: TOPEX, Jason-1 and OSTM/Jason-2. Mar. Geod. 2011, 34, 242–260. [Google Scholar] [CrossRef]
- Watson, C.; Coleman, R.; White, N.; Church, J.; Govind, R. Absolute Calibration of TOPEX/Poseidon and Jason-1 Using GPS Buoys in Bass Strait, Australia Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 285–304. [Google Scholar] [CrossRef]
- Watson, C.; White, N.; Coleman, R.; Church, J.; Morgan, P.; Govind, R. TOPEX/Poseidon and Jason-1: Absolute Calibration in Bass Strait, Australia. Mar. Geod. 2004, 27, 107–131. [Google Scholar] [CrossRef]
- Yang, L.; Zhou, X.; Mertikas, S.P.; Zhu, L.; Yang, L.; Lei, N. First Calibration Results of Jason-2 and Saral/AltiKa Satellite Altimeters from the Qianliyan Permanent Facilities. Adv. Space Res. 2017, 59, 2831–2842. [Google Scholar] [CrossRef]
- Zhou, X.; Yang, L.; Wang, Y.; Zhu, L.; Fu, Y.; Li, F. Research Progress of Satellite Altimeter Calibration in China. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8297–8299, ISSN 2153-6996. [Google Scholar] [CrossRef]
- Lei, Y.; Xinghua, Z.; Quanjun, X.; Baogui, K.; Bo, M.; Lin, Z. Research status of satellite altimeter calibration. J. Remote Sens. 2019, 23, 392–407. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Bergé-Nguyen, M.; Calmant, S.; Jamangulova, N.; Satylkanov, R.; Lyard, F.; Perosanz, F.; Verron, J.; Samine Montazem, A.; Le Guilcher, G.; et al. Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Calmant, S.; Romanovski, V.; Perosanz, F.; Tashbaeva, S.; Bonnefond, P.; Moreira, D.; Shum, C.; Nino, F.; Bergé-Nguyen, M. Absolute calibration of Jason radar altimeters from GPS kinematic campaigns over Lake Issykkul. Mar. Geod. 2011, 34, 291–318. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Calmant, S.; Romanovski, V.; Shabunin, A.; Lyard, F.; Bergé-Nguyen, M.; Cazenave, A.; Hernandez, F.; Perosanz, F. An absolute calibration site for radar altimeters in the continental domain: Lake Issykkul in Central Asia. J. Geod. 2008, 83, 723–735. [Google Scholar] [CrossRef]
- Shum, C.; Yi, Y.; Cheng, K.; Kuo, C.; Braun, A.; Calmant, S.; Chambers, D. Calibration of JASON-1 Altimeter over Lake Erie Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 335–354. [Google Scholar] [CrossRef]
- Dong, X.; Woodworth, P.; Moore, P.; Bingley, R. Absolute Calibration of the TOPEX/POSEIDON Altimeters using UK Tide Gauges, GPS, and Precise, Local Geoid-Differences. Mar. Geod. 2002, 25, 189–204. [Google Scholar] [CrossRef]
- Chen, G.; Tang, J.; Zhao, C.; Wu, S.; Yu, F.; Ma, C.; Xu, Y.; Chen, W.; Zhang, Y.; Liu, J.; et al. Concept Design of the “Guanlan” Science Mission: China’s Novel Contribution to Space Oceanography. Front. Mar. Sci. 2019, 6, 194. [Google Scholar] [CrossRef]
- Fu, L.L.; Ubelmann, C. On the Transition from Profile Altimeter to Swath Altimeter for Observing Global Ocean Surface Topography. J. Atmos. Ocean. Technol. 2014, 31, 560–568. [Google Scholar] [CrossRef]
- Wang, J.; Fu, L.L.; Torres, H.S.; Chen, S.; Qiu, B.; Menemenlis, D. On the Spatial Scales to be Resolved by the Surface Water and Ocean Topography Ka-Band Radar Interferometer. J. Atmos. Ocean. Technol. 2019, 36, 87–99. [Google Scholar] [CrossRef]
- Morrow, R.; Fu, L.L.; Ardhuin, F.; Benkiran, M.; Chapron, B.; Cosme, E.; d’Ovidio, F.; Farrar, J.T.; Gille, S.T.; Lapeyre, G.; et al. Global Observations of Fine-Scale Ocean Surface Topography With the Surface Water and Ocean Topography (SWOT) Mission. Front. Mar. Sci. 2019, 6, 232. [Google Scholar] [CrossRef]
- Wang, J.; Fu, L.L. On the Long-Wavelength Validation of the SWOT KaRIn Measurement. J. Atmos. Ocean. Technol. 2019, 36, 843–848. [Google Scholar] [CrossRef]
- Daniel, E.F. SWOT Project Mission Performance and Error Budget Revision A; Technical Report JPL D-79084; NASA/JPL: Pasadena, CA, USA, 2017.
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Lion, C.; Pitcher, L.H.; Allen, G.H.; Bates, P.D.; Calmant, S.; Durand, M.; Smith, L.C. AirSWOT measurements of river water surface elevation and slope: Tanana River, AK. Geophys. Res. Lett. 2017, 44, 181–189. [Google Scholar] [CrossRef]
- Tuozzolo, S.; Lind, G.; Overstreet, B.; Mangano, J.; Fonstad, M.; Hagemann, M.; Frasson, R.P.M.; Larnier, K.; Garambois, P.A.; Monnier, J.; et al. Estimating River Discharge with Swath Altimetry: A Proof of Concept Using AirSWOT Observations. Geophys. Res. Lett. 2019, 46, 1459–1466. [Google Scholar] [CrossRef]
- Wang, J.; Fu, L.L.; Qiu, B.; Menemenlis, D.; Farrar, J.T.; Chao, Y.; Thompson, A.F.; Flexas, M.M. An Observing System Simulation Experiment for the Calibration and Validation of the Surface Water Ocean Topography Sea Surface Height Measurement Using In Situ Platforms. J. Atmos. Ocean. Technol. 2017, 35, 281–297. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Fu, L.L. An Observing System Simulation Experiment for Ocean State Estimation to Assess the Performance of the SWOT Mission: Part 1—A Twin Experiment. J. Geophys. Res. Ocean. 2019, 124, 4838–4855. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, X.; Wang, H.; Tan, Y.; Zhai, W.; Dong, X.; Kang, X.; Yang, Q.; Li, D.; Jiang, J. Interferometric Imaging Radar Altimeter on Board Chinese Tiangong-2 Space Laboratory. In Proceedings of the 2018 Asia-Pacific Microwave Conference (APMC), Kyoto, Japan, 6–9 November 2018; pp. 851–853. [Google Scholar] [CrossRef]
- Alves, J.H.G.M.; Banner, M.L.; Young, I.R. Revisiting the Pierson–Moskowitz Asymptotic Limits for Fully Developed Wind Waves. J. Phys. Oceanogr. 2003, 33, 1301–1323. [Google Scholar] [CrossRef]
- Rodriguez, E.; Martin, J. Theory and design of interferometric synthetic aperture radars. IEE Proc. F Radar Signal Process. 1992, 139, 147–159. [Google Scholar] [CrossRef]
- Toffoli, A.; Bitner-Gregersen, E.M. Types of Ocean Surface Waves, Wave Classification. In Encyclopedia of Maritime and Offshore Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Lin, Y. Development and Applications of A GNSS Buoy for Monitoring tides and Ocean Waves in Coastal Areas. Ph.D. Thesis, National Cheng Kung University, Tainan, Taiwan, 2018. [Google Scholar]
- Herring, T.; King, R.; McClusky, S. GAMIT Reference Manual, GPS Analysis at MIT, Release 10.4.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Matsumoto, K.; Takanezawa, T.; Ooe, M. Ocean Tide Models Developed by Assimilating TOPEX/POSEIDON Altimeter Data into Hydrodynamical Model: A Global Model and a Regional Model around Japan. J. Oceanogr. 2000, 56, 567–581. [Google Scholar] [CrossRef]
- Andersen, O.; Knudsen, P.; Stenseng, L. The DTU13 MSS (Mean Sea Surface) and MDT (Mean Dynamic Topography) from 20 Years of Satellite Altimetry. In IGFS 2014; Jin, S., Barzaghi, R., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 111–121. [Google Scholar]
- Martinez-Benjamin, J.J.; Martinez-Garcia, M.; Lopez, S.G.; Andres, A.N.; Pozuelo, F.B.; Infantes, M.E.; Lopez-Marco, J.; Davila, J.M.; Pasquin, J.G.; Silva, C.G.; et al. Ibiza Absolute Calibration Experiment: Survey and Preliminary Results. Marine Geodesy 2004, 27, 657–681. [Google Scholar] [CrossRef]
- Rikka, S.; Uiboupin, R.; Kõuts, T.; Vahter, K.; Pärt, S. A Method for Significant Wave Height Estimation from Circularly Polarized X-Band Coastal Marine Radar Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 844–848. [Google Scholar] [CrossRef]
- Populus, J.; Aristaghes, C.; Jonsson, L.; Augustin, J.; Pouliquen, E. The use of SPOT data for wave analysis. Remote Sens. Environ. 1991, 36, 55–65. [Google Scholar] [CrossRef]
- Salin, B.M.; Salin, M.B. Combined Method for Measuring 3D Wave Spectra. II. Examples of Using the Basic Measurement Procedures and Analysis of the Obtained Results. Radiophys. Quantum Electron. 2015, 58, 185–196. [Google Scholar] [CrossRef]
- Emery, W.J.; Thomson, R.E. Data Analysis Methods in Physical Oceanography; Elsevier Science: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Qiufu, J.; Yongsheng, X.; Hanwei, S.; Lideng, W.; Lei, Y. Ocean Surface Waves Observation from Airborne Ka band Interferometric Altimeter. Remote Sens. 2020. submitted. [Google Scholar]
- Wessel, P.; Smith, W.H.F.; Scharroo, R.; Luis, J.; Wobbe, F. Generic Mapping Tools: Improved Version Released. Eos Trans. Am. Geophys. Union 2013, 94, 409–410. [Google Scholar] [CrossRef]
- Welch, P.D. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Percival, D.B.; Walden, A.T. Spectral Analysis for Physical Applications; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Ka Band Interferometric Altimeter |
|---|---|
| Center frequency | 35 GHz |
| Processed incidence angle | 1–15 |
| Bandwidth | 500 MHz |
| Pulse repetition frequency | 2000 Hz |
| Range resolution | 0.3 m |
| Azimuth resolution | 0.3 m |
| Flight altitude | 3000 m |
| Baseline length | 30 cm |
| Source | SSH Difference | Standard Deviation |
|---|---|---|
| GNSS buoys | 30 cm | cm |
| AIRAS | 27 cm | NaN |
| DTU MSS 2018 model | 27 cm | NaN |
| Location | Source | Variance | Bias | Correlation Coefficient |
|---|---|---|---|---|
| GNSS Buoy 1 | GNSS | 28 cm | 8 cm | |
| AIRAS | 36 cm | |||
| GNSS buoy 2 | GNSS | 45 cm | 7 cm | |
| AIRAS | 52 cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Xu, Y.; Zhou, X.; Zhu, L.; Jiang, Q.; Sun, H.; Chen, G.; Wang, P.; Mertikas, S.P.; Fu, Y.; et al. Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China. Remote Sens. 2020, 12, 1651. https://doi.org/10.3390/rs12101651
Yang L, Xu Y, Zhou X, Zhu L, Jiang Q, Sun H, Chen G, Wang P, Mertikas SP, Fu Y, et al. Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China. Remote Sensing. 2020; 12(10):1651. https://doi.org/10.3390/rs12101651
Chicago/Turabian StyleYang, Lei, Yongsheng Xu, Xinghua Zhou, Lin Zhu, Qiufu Jiang, Hanwei Sun, Ge Chen, Panlong Wang, Stelios P. Mertikas, Yanguang Fu, and et al. 2020. "Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China" Remote Sensing 12, no. 10: 1651. https://doi.org/10.3390/rs12101651
APA StyleYang, L., Xu, Y., Zhou, X., Zhu, L., Jiang, Q., Sun, H., Chen, G., Wang, P., Mertikas, S. P., Fu, Y., Tang, Q., & Yu, F. (2020). Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China. Remote Sensing, 12(10), 1651. https://doi.org/10.3390/rs12101651