A Correlated Multi-Pixel Inversion Approach for Aerosol Remote Sensing



Abstract

1. Introduction
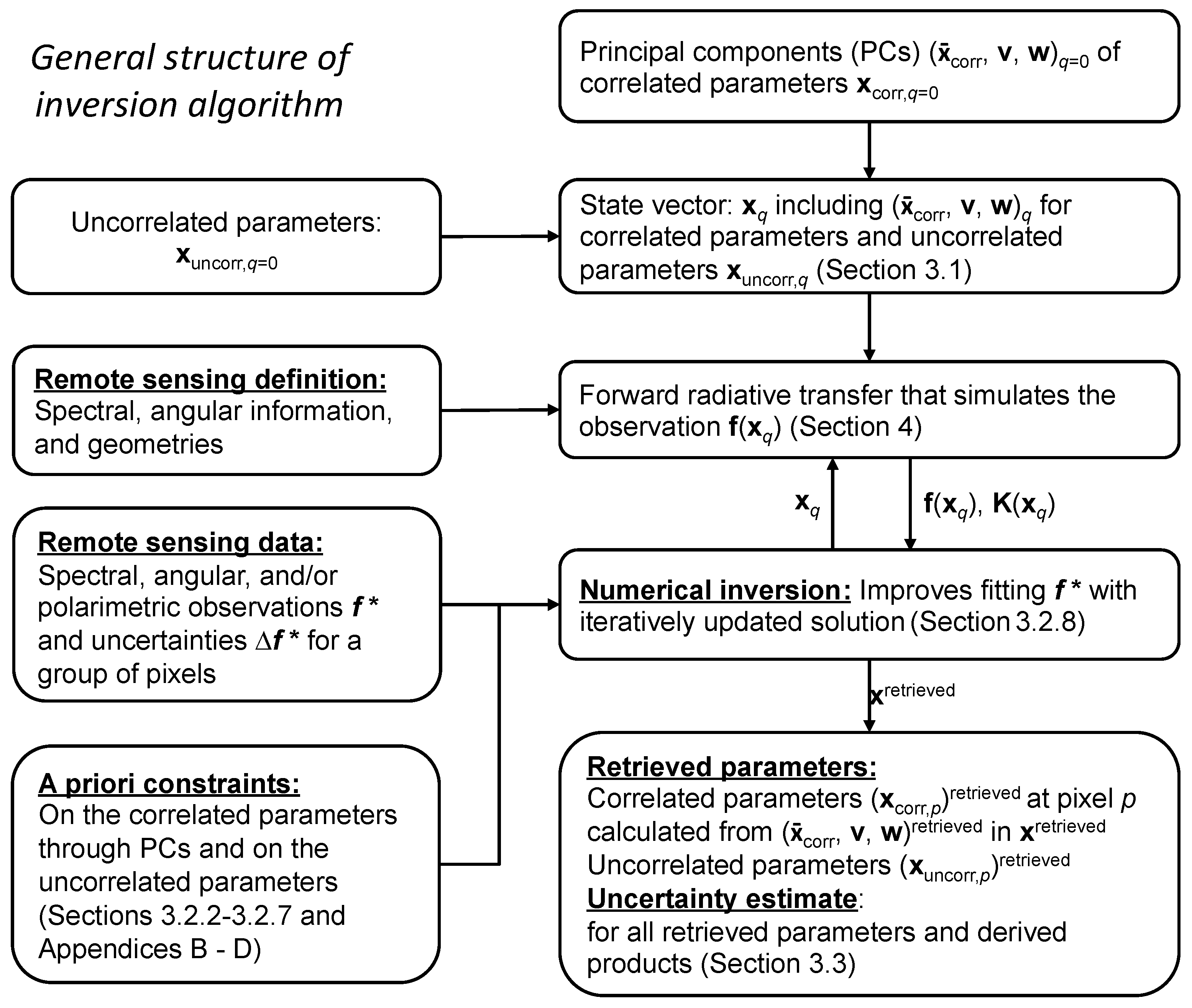
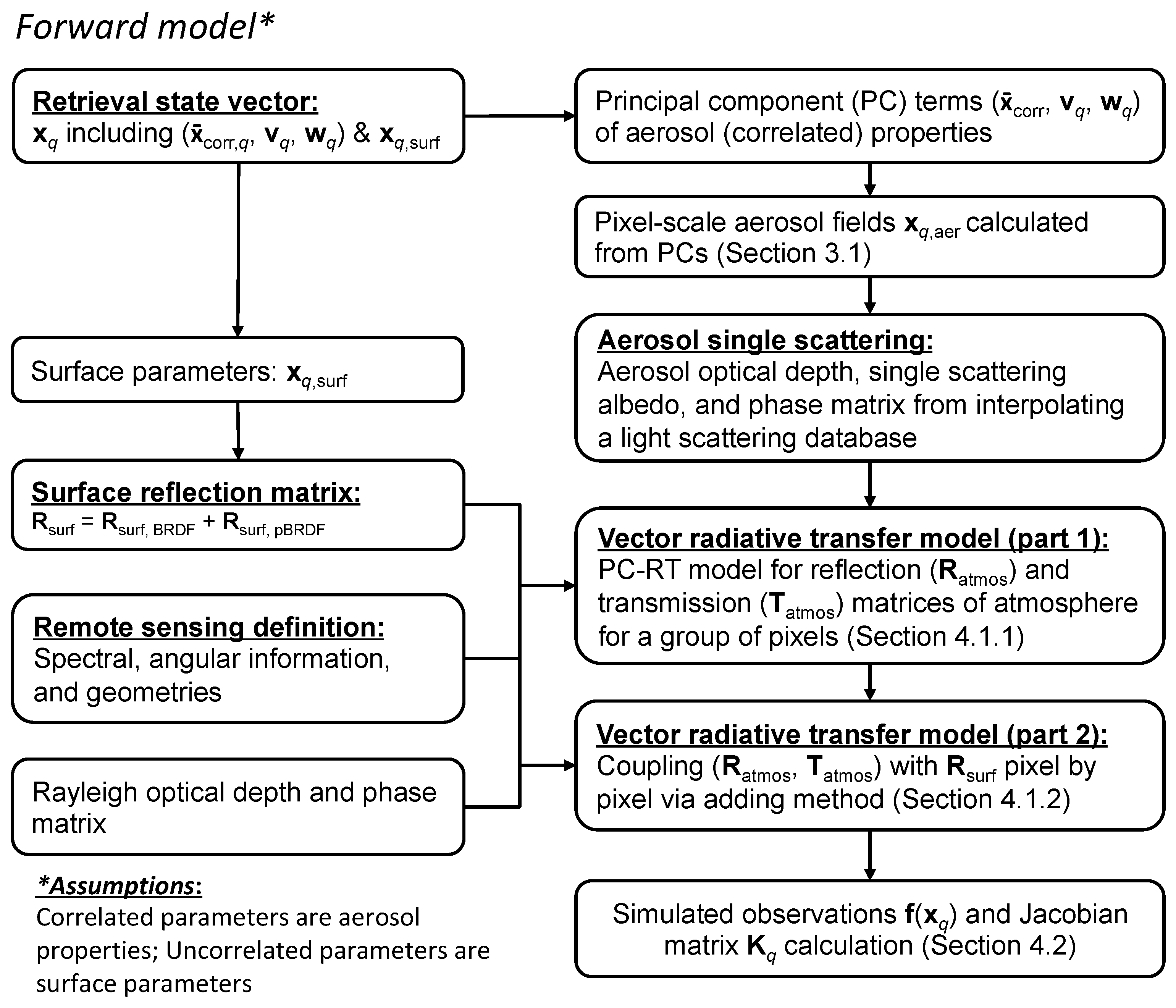
2. General Structure of the Algorithm
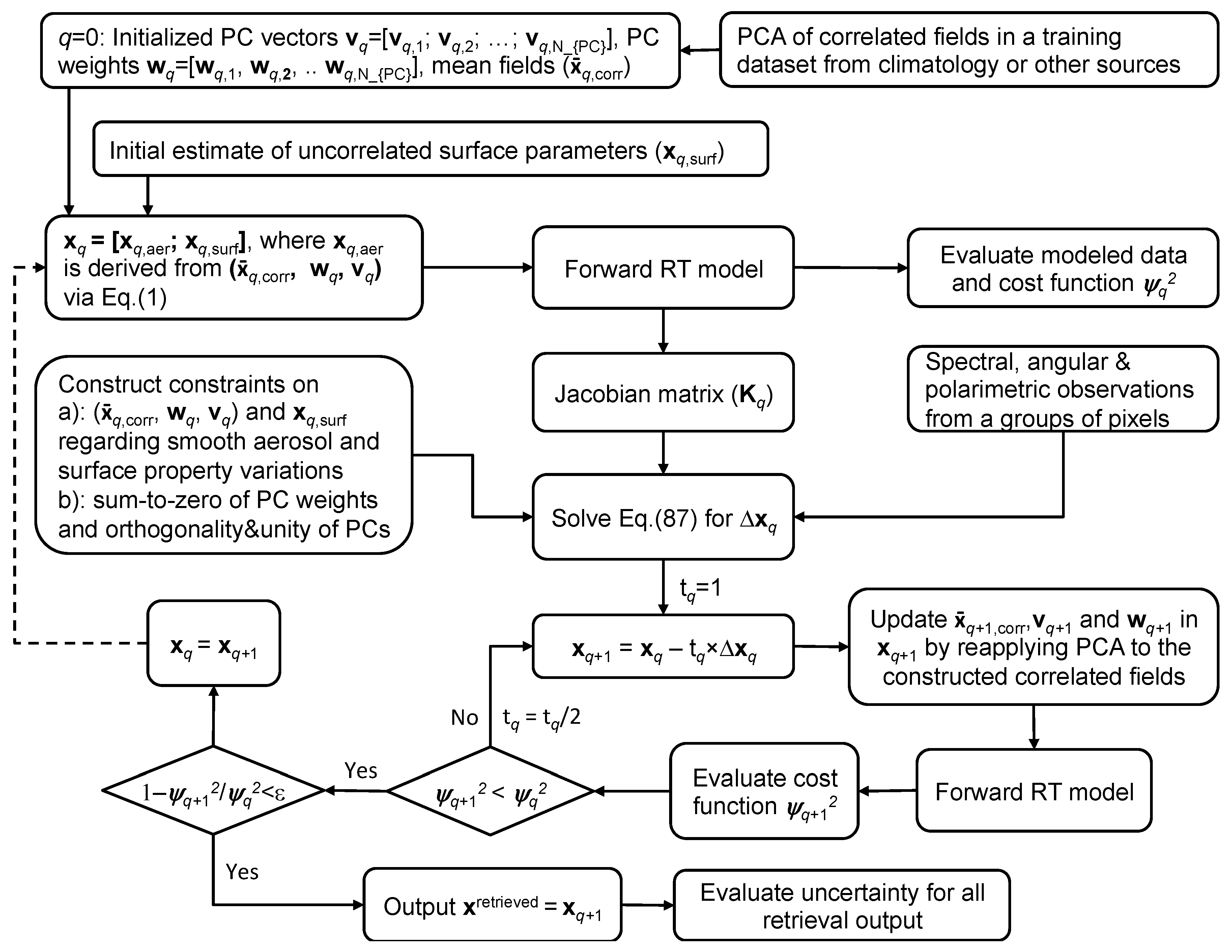
3. Inversion
3.1. State Vector
3.2. Constraints
- The first type of constraint, formulated in Section 3.2.1, consists of the observations provided directly by the remote sensing instrument(s).
- The second type of constraint consists of a priori values for the retrieval parameters, and is described in Section 3.2.2.
- For the uncorrelated fields (such as surface reflection properties), the pixel-resolved properties can be subjected to both across-pixel and within-pixel constraints. Imposition of these types of constraints has been incorporated into the original multi-pixel inversion [6] and is repeated in Section 3.2.3 as well as in Appendix B as the third type of constraint.
- When a set of parameters (e.g., aerosol properties) are correlated with each other, their mean can be subjected to smoothness constraints. This is referred to as the fourth type of constraint in Section 3.2.3.
- Transformation of smooth variations of aerosol properties from regular aerosol parameters into the PC space forms the fifth type of constraint, discussed in Section 3.2.4.
- In PC space, the smoothness constraints can be applied to the PC weights w and vectors v separately. Application to across-pixel weights w, discussed in Section 3.2.3, forms the sixth type of constraint.
- Similarly, application of the smoothness constraints to certain type of parameters within a PC vector , also discussed in Section 3.2.3, forms the seventh type of constraint. Although it appears that the sixth and seventh types of constraints applied to “w” and “v” separately are redundant with the fifth type of constraint that ensures a smooth variation of overall correlated field constructed from PCs; they are helpful when poor initial guesses of “w” and “v” are provided by a training dataset.
- The eighth type of constraint, formulated in Section 3.2.5, imposes a zero sum of the PC weights.
- The ninth type of constraint, formulated in Section 3.2.6, imposes mutual orthogonality of the PC vectors.
- The tenth type of constraint, formulated in Section 3.2.7, imposes unit norm on all PC vectors.
3.2.1. Observational Constraints (i = 1)
3.2.2. A Priori Constraints (i = 2)
3.2.3. Smoothness Constraints in Regular Parameter Space (i = 3, 4, 6, and 7)
3.2.4. Smoothness Constraints in PC Space (i = 5)
3.2.5. Zero-sum Constraint on PC Weights (i = 8)
3.2.6. Mutual Orthogonality Constraint among PC Vectors (i = 9)
3.2.7. Unity-norm Constraint PC Vectors (i = 10)
3.2.8. Construction of Overall Equation System
3.2.9. Determination of Lagrange Multipliers
3.3. Retrieval Error Estiamte
3.4. Retrieval Options
4. Radiative Transfer in a Coupled Atmosphere-Surface System
4.1. Fast Multi-Pixel Polarized RT Modeling in the Atmosphere
4.1.1. Fast Multiple-Pixel Radiative Transfer Modeling Utilizing Correlation
4.1.2. Coupling Atmospheric Radiation with Surface Reflection
4.2. Jacobian Evaluation
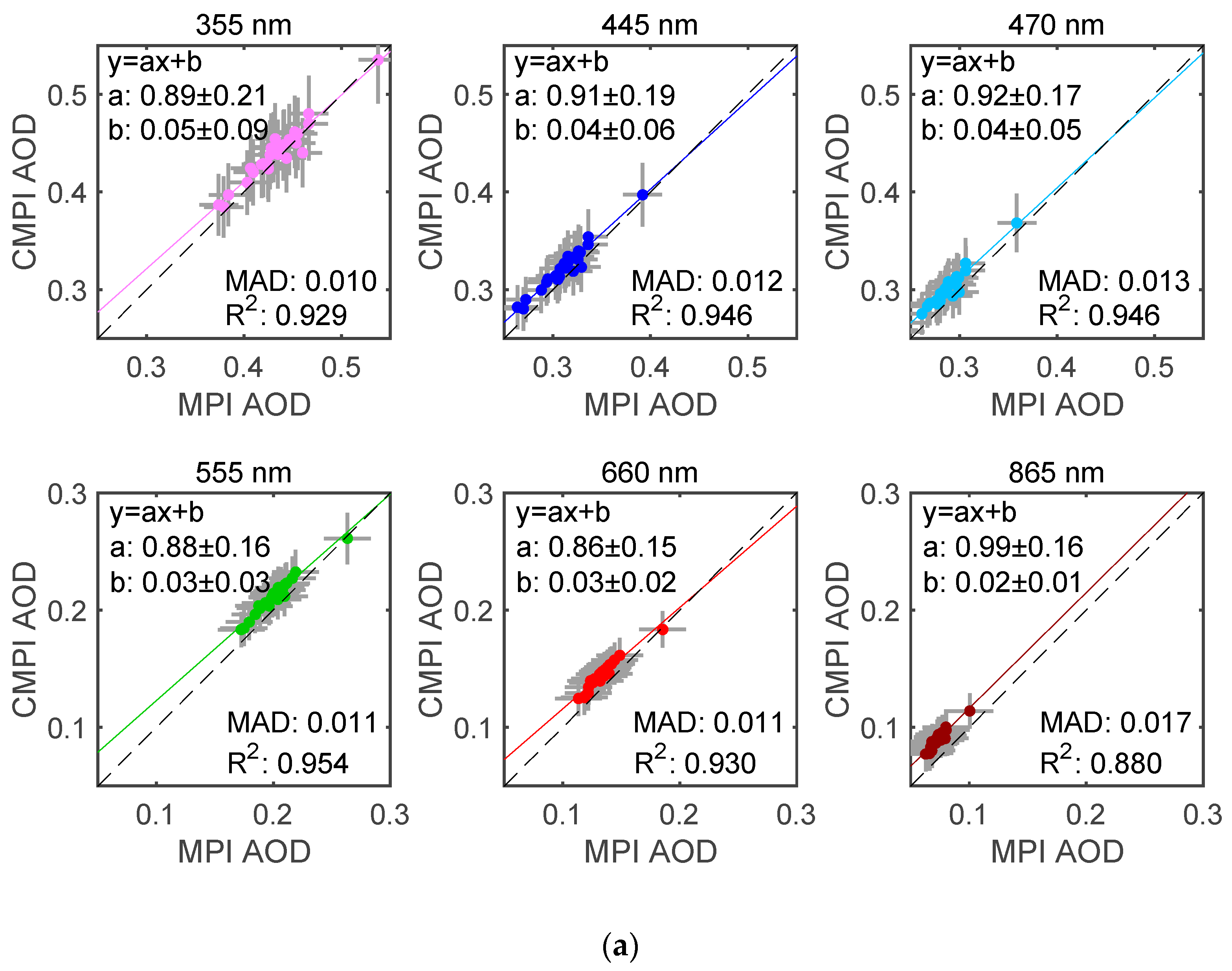
5. Inversion of Aerosol and Surface Properties
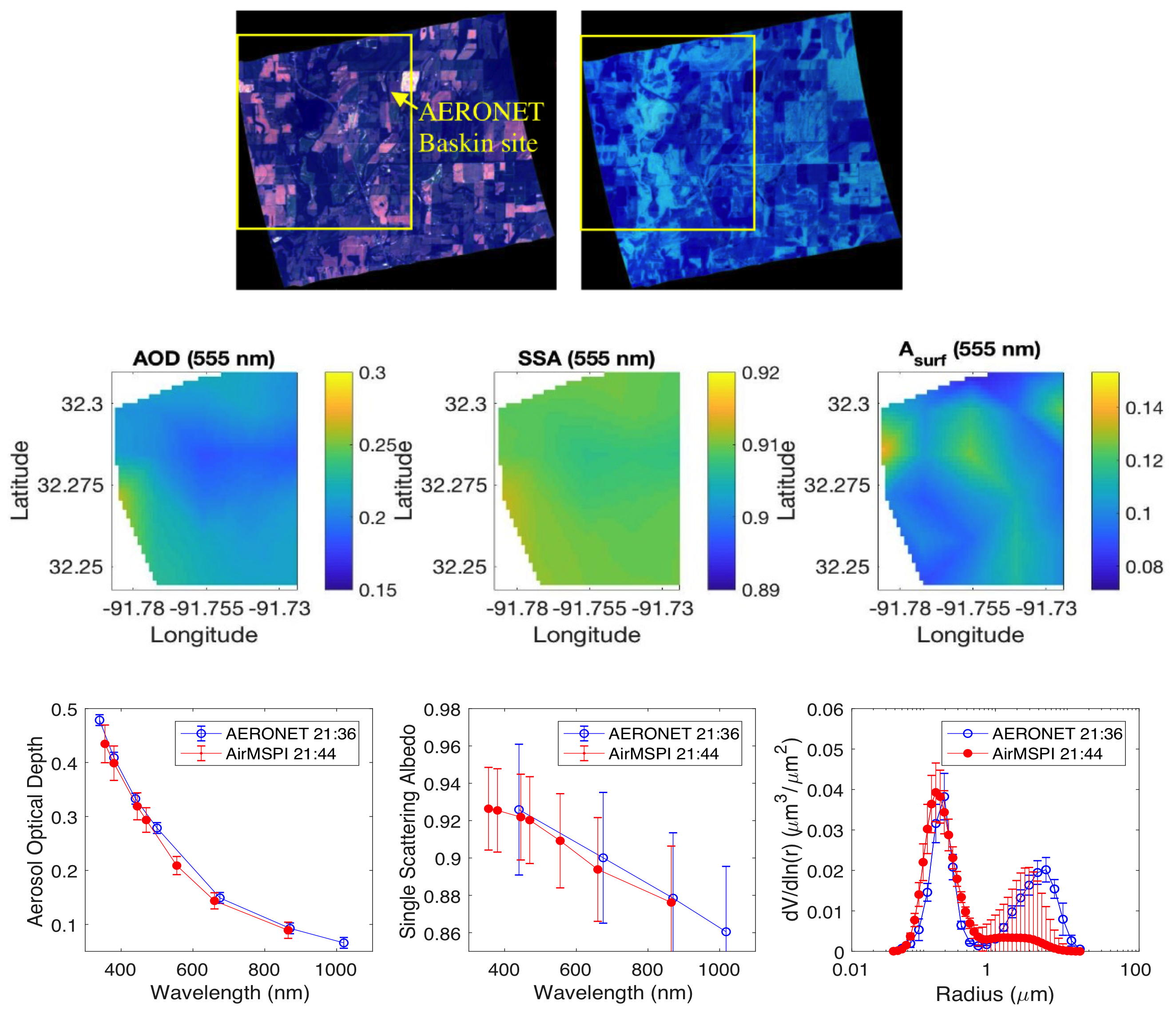
5.1. AirMSPI Datasets
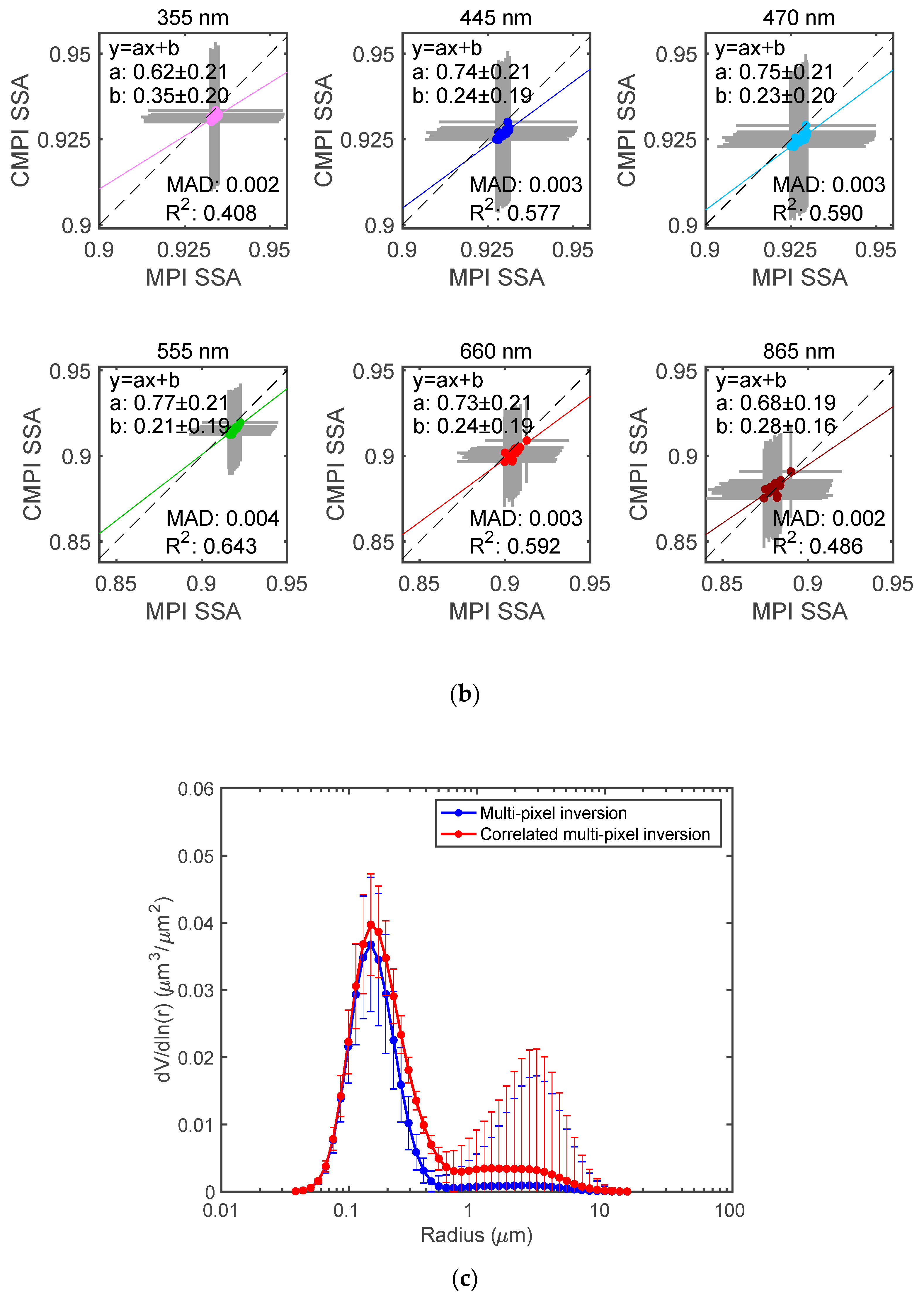
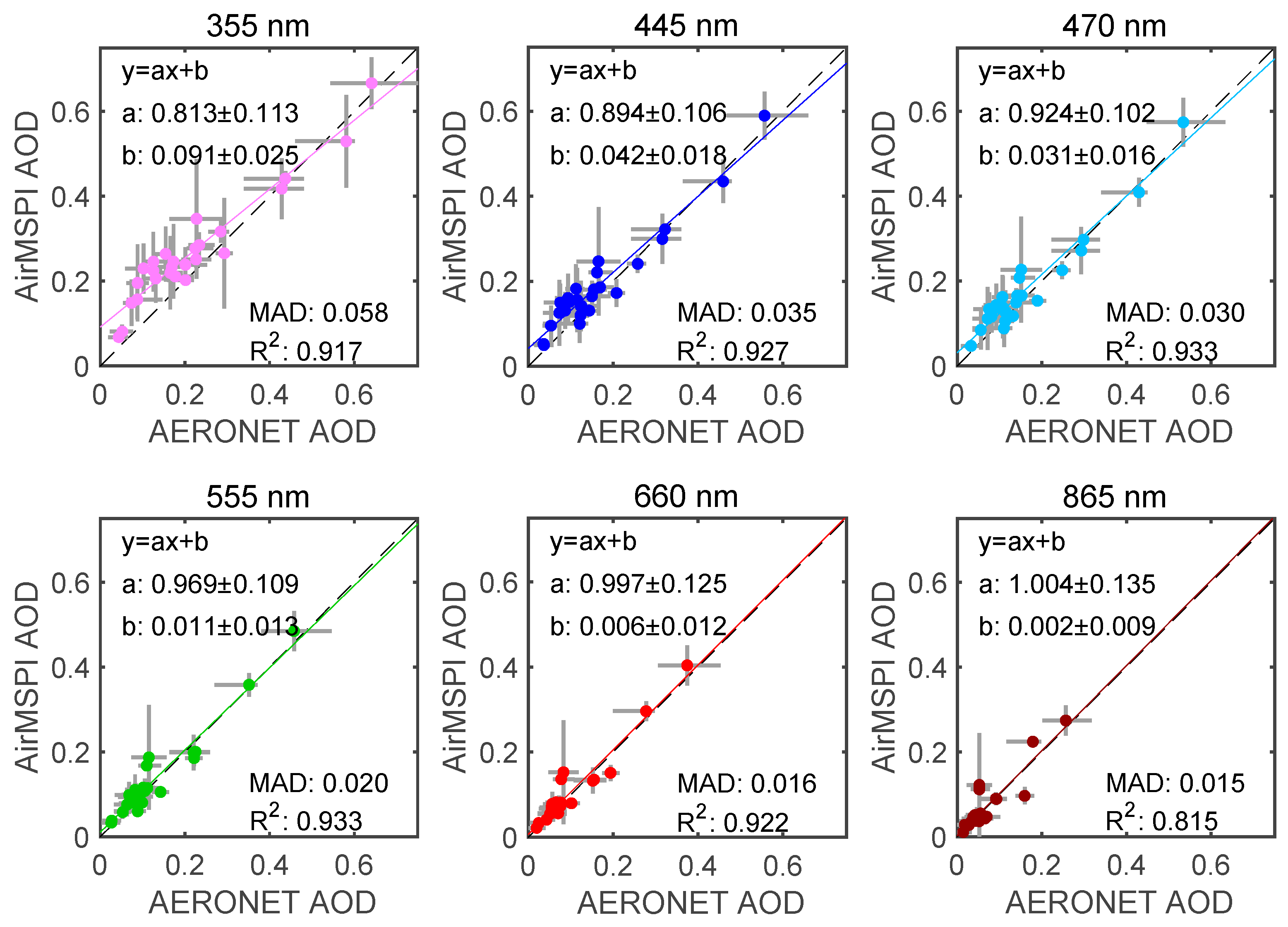
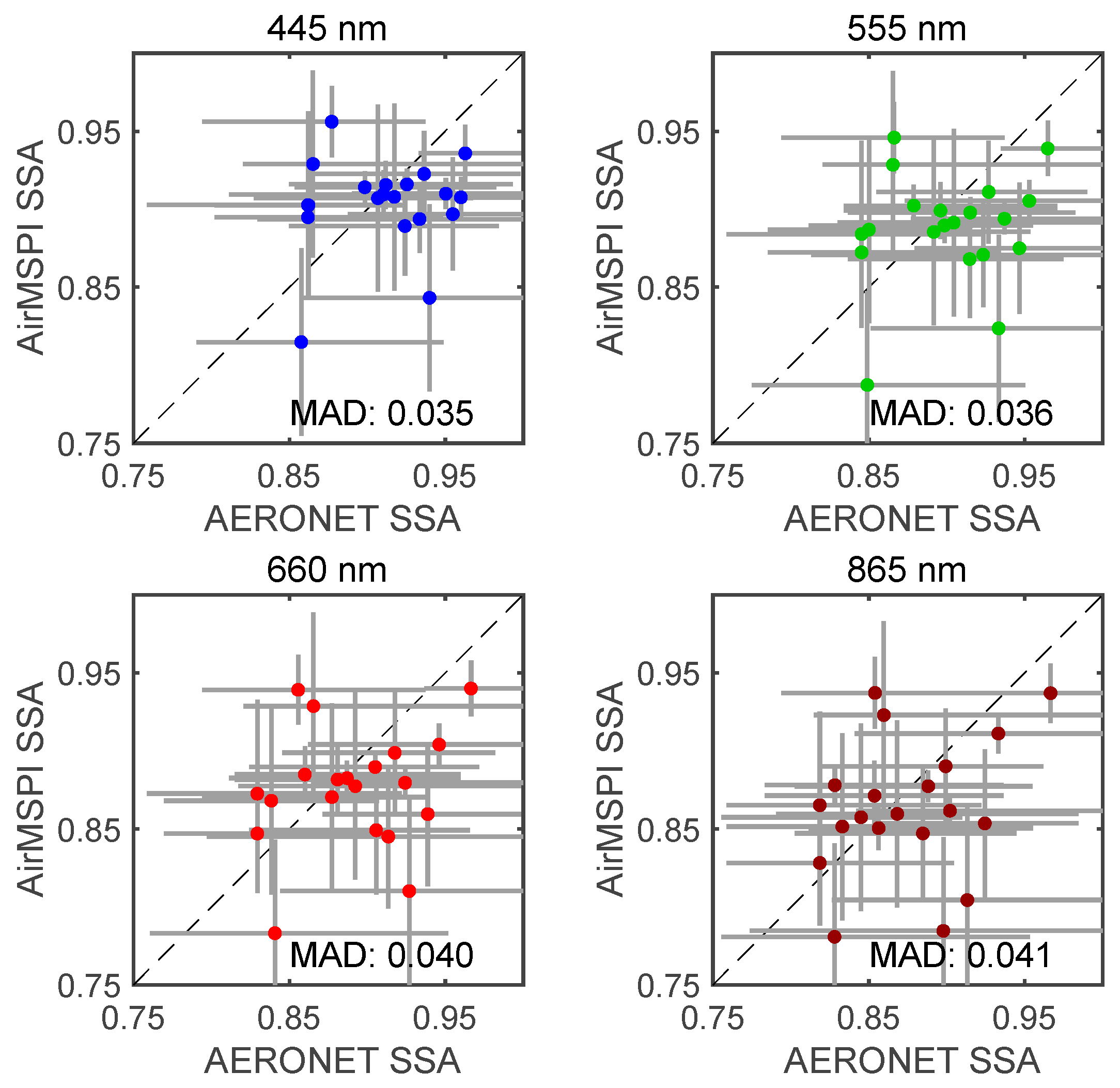
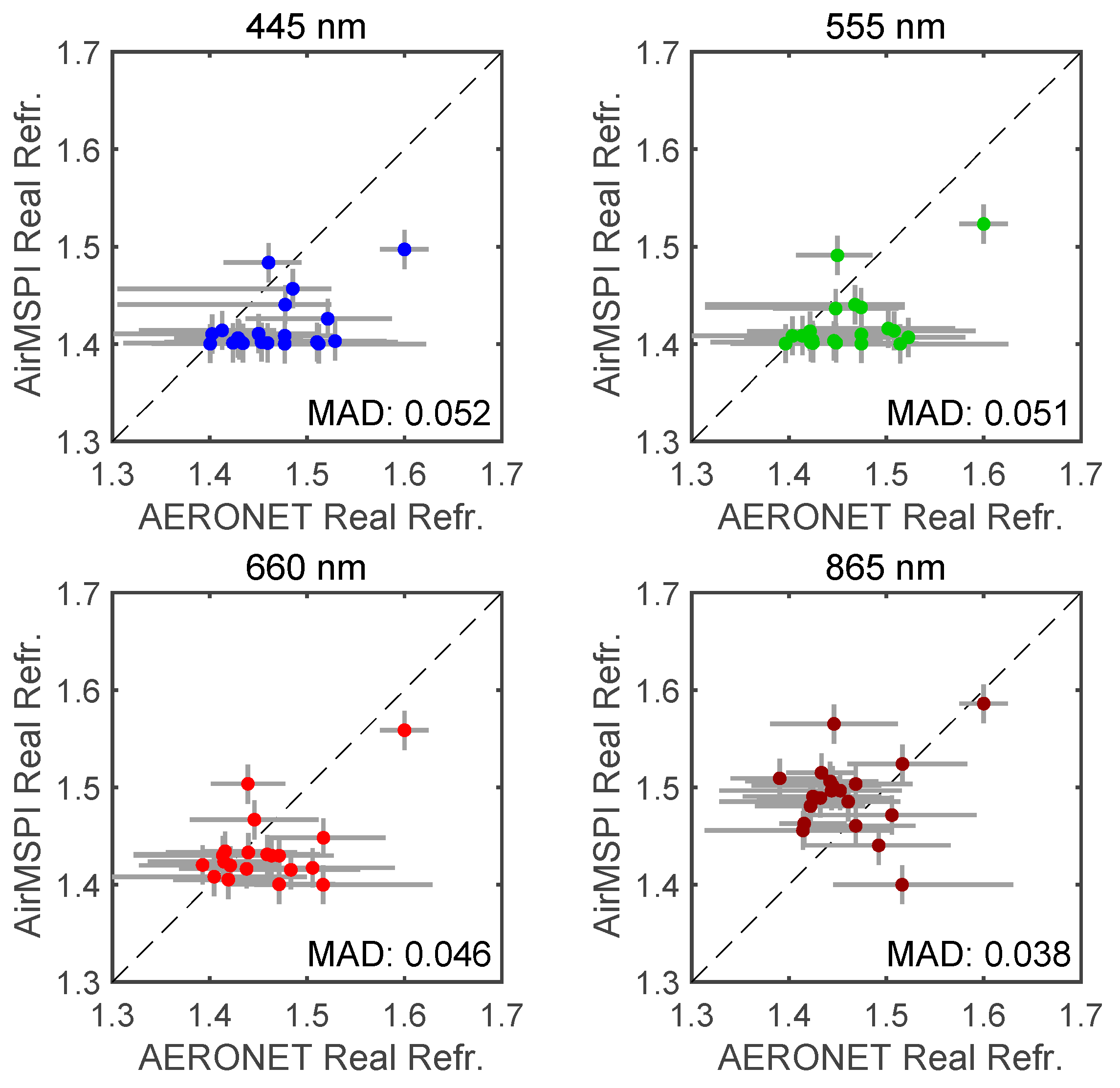
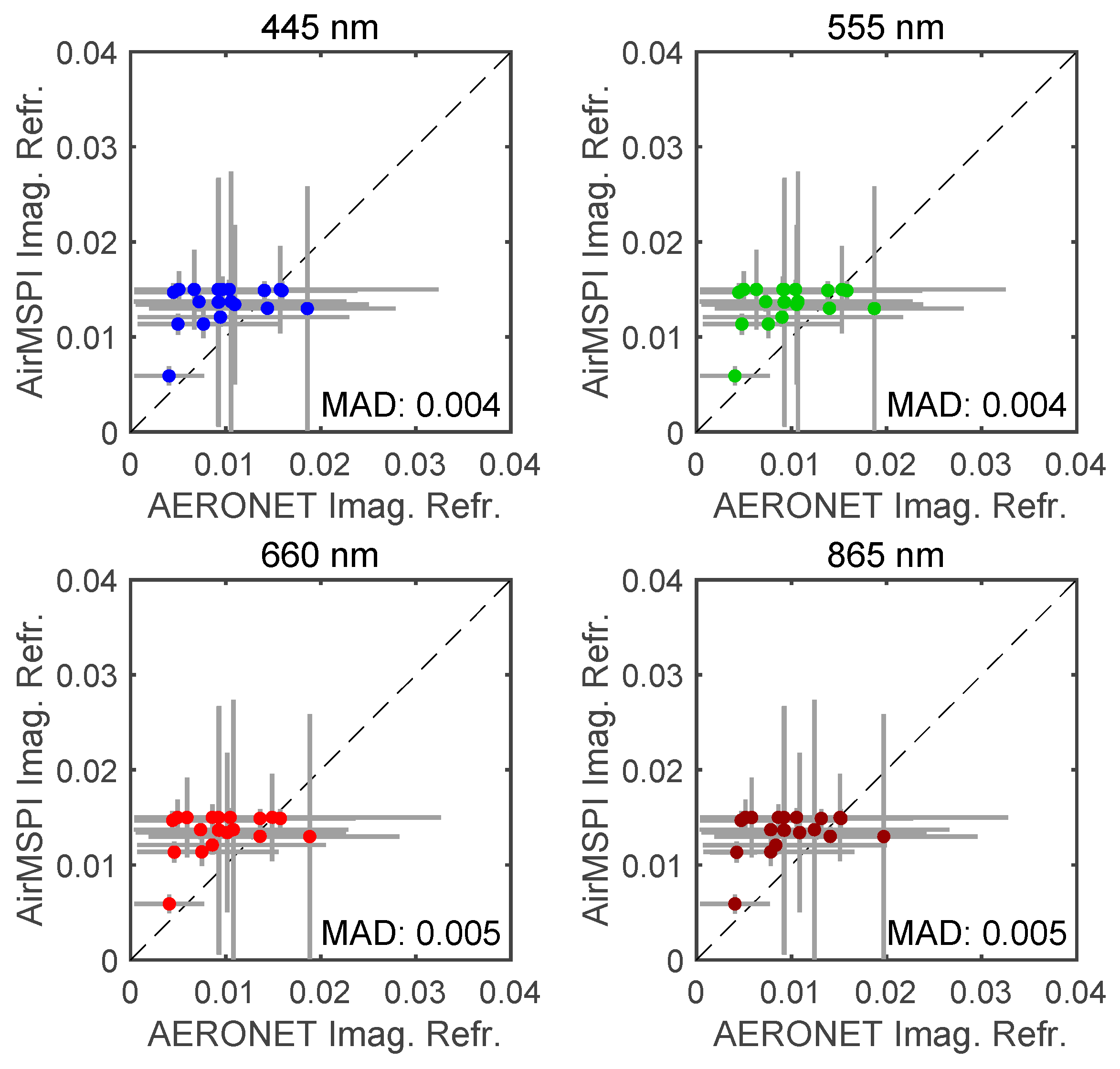
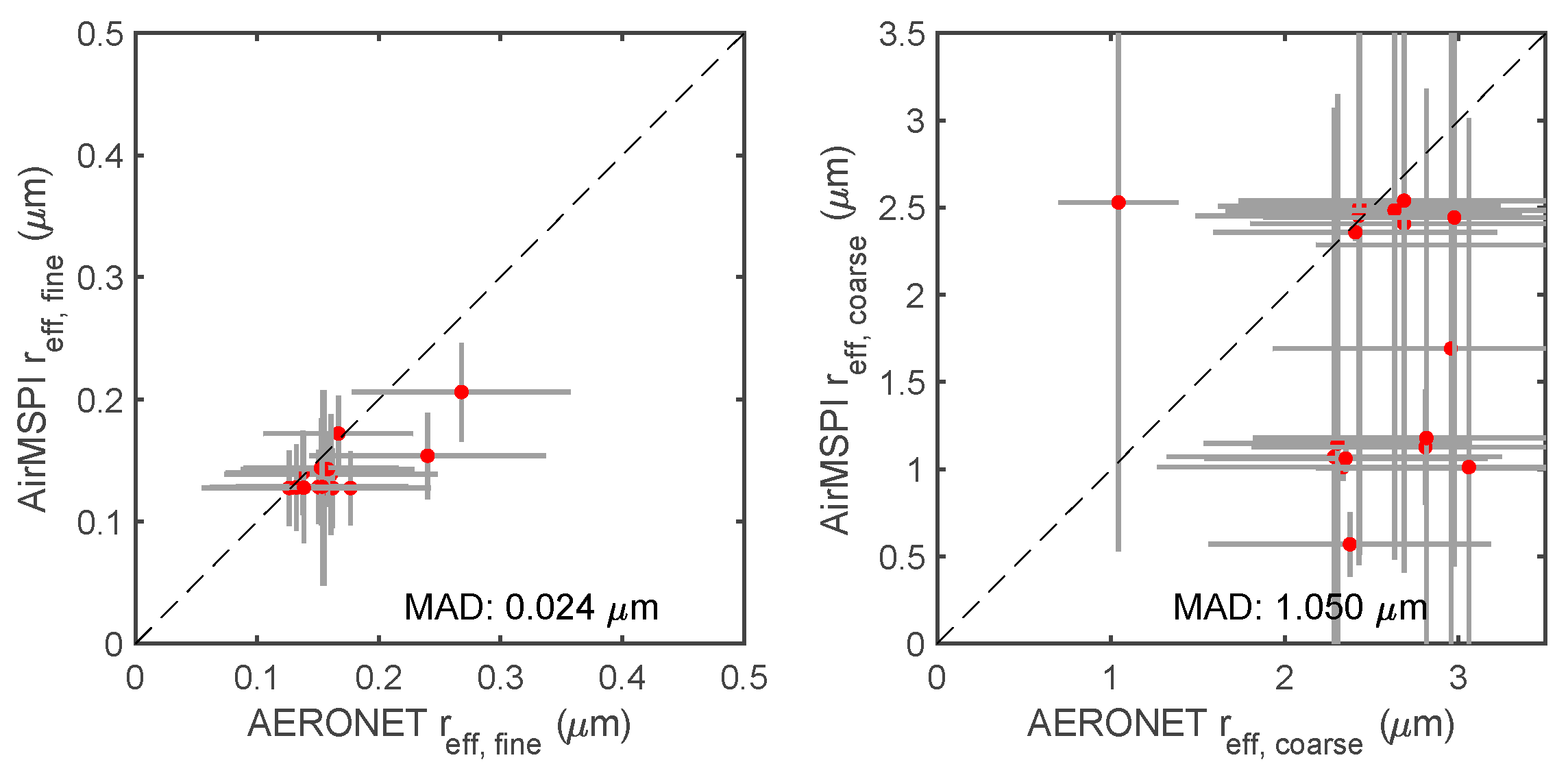
5.2. Retrieval Validation against AERONET Products
6. Summary and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Symbols and Abbreviations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol/Abbreviation | Description |
|---|---|
| a | Slope of a regression line |
| Mean slope of a set of regression lines | |
| Spectral weight of surface BRDF | |
| A | Coefficient for a basic smooth function shape, e.g., “g(z) = Az 2 + Bz + C” for a parabola |
| A | Fischer matrix |
| AERONET | Aerosol Robotic Network |
| AirMSPI | Airborne Multiangle SpectroPolarimetric Imager |
| AOD | Aerosol optical depth |
| ASTER | Advanced Spaceborne Thermal Emission and Reflection Radiometer |
| Asurf | Surface albedo |
| b | Intercept of a regression line |
| Mean intercept of a set of regression lines | |
| B | Coefficient for a basic smooth function shape, e.g., “g(z) = Az 2 + Bz + C” for a parabola |
| BRDF | Bidirectional reflectance distribution function |
| BRF | Bidirectional reflectance factor (BRF) associated with Stokes vector component I |
| c | Constant column vector that weight correlated fields in PC analysis |
| C | Coefficient for a basic smooth function shape, e.g., “g(z) = Az 2 + Bz + C” for a parabola |
| Covariance matrix of i-th type of constraint | |
| Covariance matrix of random errors in the measurements | |
| Cv,sphere | Column volume concentration of spherical aerosols |
| Cv,tot | Total column volume concentration of aerosols |
| d | Differentiation array |
| Earth-Sun distance | |
| DOLP | Degree of linear polarization |
| dV/dln(r) | Volume weighted aerosol size distribution |
| Exo-atmospheric solar irradiance | |
| Column vector of i-th type of constraint | |
| Column vector that contains model prediction to fit i-th type of constraint | |
| Column vector that contains the errors of i-th type of constraint | |
| ffine | Fine mode aerosol fraction |
| fv,sphere | Volume fraction of spherical aerosols |
| g(z) | Smooth function with variable z |
| Spectral anisotropy parameter of surface BRDF | |
| GRASP | Generalized Retrieval of Aerosol and Surface ProperEes |
| h | Cartesian coordinate in the direction h |
| ha | Central height of aerosol vertical profile (constrained by Gaussian profile) |
| I | First Stokes vector component |
| I | Identity matrix |
| Imeas | Measured radiance |
| Spectral anisotropy parameter of surface BRDF | |
| Shadowing width of polarized BRDF | |
| Jacobian matrix | |
| The Jacobian matrix associated with i-th type of constraint | |
| L(j) | Length of j-th type of correlated parameters (fields) |
| m | Order of difference in constructing smoothness matrix |
| M | Number of types of constraints imposed on retrieval |
| MAD | Mean absolute difference |
| MAIAC | MultiAngle Implementation of Atmospheric Correction |
| MISR | Multi-angle Imaging SpectroRadiometer |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| nr, j | Real part of refractive index at j-th wavelength |
| ni, j | Imaginary part refractive index at j-th wavelength |
| Total number of retrieval parameters | |
| Total number of a priori estimate of parameters | |
| Total number of constraints imposed on retrieval | |
| Number of correlated parameters (fields) | |
| Total number of observations (all pixels are accounted) | |
| Total number of i-th type of constraint | |
| Total number of principle components | |
| Total number of pixels | |
| Number of aerosol size components | |
| Total number of types of uncorrelated parameters | |
| O | Constraining matrix that reflects zero-sum of PC weights |
| pBRDF | Polarized BRDF |
| P | Probability distribution function (PDF) |
| PC | Principal component |
| PCA | Principal component analysis |
| POLDER | Polarization and Directionality of Earth’s Reflectance |
| q | Ratio of Stokes components Q and I |
| q | Iterative step during optimization |
| qBRFTOA | Top-of-atmosphere BRF associated with Stokes vector component Q |
| Q | Second Stokes vector component |
| r | Radius of aerosol |
| reff,coarse | Effective radius of coarse mode aerosols |
| reff,fine | Effective radius of fine mode aerosols |
| R | Reflection matrix |
| R2 | Coefficient of determination |
| Reflection matrix for atmosphere associated with light illumination from top of the atmosphere | |
| Reflection matrix for atmosphere associated with light illumination from bottom of the atmosphere | |
| Reflection matrix for the coupled atmosphere-surface system (CAS) | |
| RPV | Rahman-Pinty-Verstraete (surface BRDF model) |
| Surface reflection matrix | |
| Depolarizing part of surface reflection matrix | |
| Polarizing part of surface reflection matrix | |
| RT | Radiative transfer |
| sa | Standard deviation of aerosol vertical profile (constrained by Gaussian profile) |
| Differentiation matrix of m-th order for i-th type of constraint | |
| SSA | Single scattering albedo |
| t | Temporal coordinate |
| T | Transmission matrix |
| Transmission matrix for atmosphere associated with light illumination from top of the atmosphere | |
| Transmission matrix for atmosphere associated with light illumination from bottom of the atmosphere | |
| TOA | Top-of-atmosphere |
| u | Cartesian coordinate in the direction u |
| u | Ratio of Stokes components U and I |
| uBRFTOA | Top-of-atmosphere BRF associated with Stokes vector component U |
| U | Third Stokes vector component |
| U | Constraining matrix that reflects the unit length of a PC |
| USGS | U.S. Geological Survey |
| v | Cartesian coordinate in the direction v |
| PC matrix containing NPC columns PC vectors | |
| vBRFTOA | Top-of-atmosphere BRF associated with Stokes vector component V |
| The k-th PC vector | |
| Column vector containing all PC vectors | |
| w | PC weight matrix containing Npixel column vectors containing PC weights |
| Weight matrix for i-th type of constraint | |
| Column vector containing PC weights for p-th pixel | |
| Column vector containing all PC weights | |
| Column state vector including all retrieval parameters | |
| a priori of state vector | |
| Column vector containing spatial and temporal mean of correlated parameters (fields) | |
| Column vector containing correlated parameters (fields) for p-th pixel | |
| The vector consisting of correlated aerosol properties – calculated from the solution at q-th iteration | |
| The vector consisting of uncorrelated surface reflection properties – containing in the solution at q-th iteration | |
| Retrieved column state vector | |
| Systematic error in retrieval | |
| Column vector containing uncorrelated parameters (fields) for p-th pixel | |
| Column state vector associated with true solution | |
| Column vector including PC weights and vectors | |
| The retrieval error in j-th parameter | |
| i-th observational signal | |
| Output of RT calculation with high stream approximation | |
| Output of RT calculation with low stream approximation | |
| z | Variable of a smooth function |
| zmin | Lower bound of z |
| zmax | Upper bound of z |
| Z | Number of observations per pixel |
| Kronecker delta | |
| Scale factor that perturbs a PC vector | |
| Random error in measurements | |
| Spectral weight of pBRDF | |
| First diagonal element of Ci | |
| User-specified threshold value to diagnose the convergence of optimization | |
| Expected variance due to measurement errors | |
| Solar zenith angle | |
| View zenith angle | |
| Wavelength | |
| Cosine of solar zenith angle | |
| Lagrange factor for i-th type of constraint | |
| Solar azimuthal angle | |
| Objective cost function for i-th type of constraint | |
| Overall objective cost function | |
| Gradient of the objective cost function for i-th type of constraint | |
| Gradient of the overall objective cost function | |
| The smoothness matrix associated with i-th type of constraints | |
| The rearranged smoothness matrix from | |
| The smoothness matrix imposed on uncorrelated parameters (fields) | |
| The smoothness matrix imposed on spatial and temporal mean mean of correlated parameters (fields) | |
| Smoothness matrix imposed on pixel resolved PC weights | |
| Smoothness matrix imposed on a PC vector | |
| Smoothness matrix imposed on correlated parameters (fields) | |
| Standard deviation of a correlated field x | |
| Uncertainty estimate of a correlated field x | |
| Slope variance of polarized BRDF | |
| Total aerosol optical depth | |
| Total absorption aerosol optical depth | |
| Atmospheric optical depth | |
| Constraining matrix that reflects the mutual orthogonality in PCs |
Appendix B. Smoothness Matrix to Constrain Uncorrelated Parameter Retrieval
Appendix B.1. Across-Pixel Smoothness Matrix
Appendix B.2. Within-Pixel Smoothness Matrix
Appendix C. Smoothness Matrix for Correlated Parameters
Appendix C.1. Across-Pixel Smoothness Constraints
Appendix C.2. Within-Pixel Smoothness Matrix
Appendix D. Decoupled Smoothness Constraints
Appendix D.1. Across-Pixel Smoothness Constraints on PC Weights
Appendix D.2. Within-PC Smoothness Constraints
References
- Phillips, D.L. A technique for numerical solution of certain integral equation of first kind. J. ACM 1962, 9, 84–97. [Google Scholar] [CrossRef]
- Twomey, S. On the numerical solution of Fredholm integral equations of the first kind by the inversion of the linear system produced by quadrature. J. ACM 1963, 10, 97–101. [Google Scholar] [CrossRef]
- Twomey, S. Introduction to the Mathematics of Inversion in Remote Sensing and Indirect Measurements; Elsevier: New York, NY, USA, 1977. [Google Scholar]
- Tikhonov, A.N. On the solution of incorrectly stated problems and a method of regularization. Dokl. Akad. Nauk SSSR 1963, 151, 501–504. [Google Scholar]
- Tikhonov, A.N.; Arsenin, V.Y. Solution of Ill-Posed Problems; Wiley: New York, NY, USA, 1977. [Google Scholar]
- Dubovik, O.; Herman, M.; Holdak, A.; Lapyonok, T.; Tanré, D.; Deuzé, J.L.; Ducos, F.; Sinyuk, A.; Lopatin, A. Statistically optimized inversion algorithm for enhanced retrieval of aerosol properties from spectral multi-angle polarimetric satellite observations. Atmos. Meas. Tech. 2011, 4, 975–1018. [Google Scholar] [CrossRef]
- Liu, X.; Smith, W.L.; Zhou, D.K.; Larar, A. Principal component-based radiative transfer model for hyperspectral sensors: Theoretical concept. Appl. Opt. 2006, 45, 201–209. [Google Scholar] [CrossRef] [PubMed]
- Natraj, V.; Spurr, R.J.D. A fast linearized pseudo-spherical two orders of scattering model to account for polarization in vertically inhomogeneous scattering-absorbing media. J. Quant. Spectrosc. Radiat. Transf. 2007, 107, 263–293. [Google Scholar] [CrossRef]
- Spurr, R.J.D.; Natraj, V.; Lerot, C.; van Roozendael, M.; Loyola, D. Linearization of the principal component analysis method for radiative transfer acceleration: Application to retrieval algorithms and sensitivity studies. J. Quant. Spectrosc. Radiat. Transf. 2013, 125, 1–17. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, D.K.; Larar, A.M.; Smith, W.L.; Mango, S.A. Case-study of a principal-component-based radiative transferforward model and retrieval algorithm using EAQUATE data. Q. J. R. Meteorol. Soc. 2007, 133, 243–256. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, D.K.; Larar, A.M.; Smith, W.L.; Schluessel, P.; Newman, S.M.; Taylor, J.P.; Wu, W. Retrieval of atmospheric profiles and cloud properties from IASI spectra using super-channels. Atmos. Chem. Phys. 2009, 9, 9121–9142. [Google Scholar] [CrossRef]
- Liu, X.; Liu, L.; Zhang, S.; Zhou, X. New spectral fitting method for full-spectrum solar-induced chlorophyll fluorescence retrieval based on principal components analysis. Remote Sens. 2015, 7, 10626–10645. [Google Scholar] [CrossRef]
- Martonchik, J.V.; Diner, D.J.; Kahn, R.A.; Verstraete, M.M.; Pinty, B.; Gordon, H.R.; Ackerman, T.P. Techniques for the retrieval of aerosol properties over land and ocean using multiangle data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1212–1227. [Google Scholar] [CrossRef]
- Martonchik, J.V.; Kahn, R.A.; Diner, D.J. Retrieval of aerosol properties over land using MISR observations. In Satellite Aerosol Remote Sensing over Land; Kokhanovsky, A., de Leeuw, G., Eds.; Springer: Berlin, Germany, 2009. [Google Scholar]
- Diner, D.J.; Martonchik, J.V.; Kahn, R.A.; Pinty, B.; Gobron, N.; Nelson, D.L.; Holben, B.N. Using angular and spectral shape similarity constraints to improve MISR aerosol and surface retrievals overland. Remote Sens. Environ. 2005, 94, 155–171. [Google Scholar] [CrossRef]
- Dubovik, O.; Li, Z.; Mishchenko, M.I.; Tanré, D.; Karol, Y.; Bojkov, B.; Cairns, B.; Diner, D.J.; Espinosa, W.R.; Goloub, P.; et al. Polarimetric remote sensing of atmospheric aerosols: Instruments, methodologies, results, and perspectives. J. Quant. Spectrosc. Radiat. Transf. 2019, 224, 474–511. [Google Scholar] [CrossRef]
- Kokhanovsky, A.A. The modern aerosol retrieval algorithms based on the simultaneous measurements of the intensity and polarization of reflected solar light: A review. Front. Environ. Sci. 2015, 3, 4. [Google Scholar] [CrossRef]
- Xu, F.; Dubovik, O.; Zhai, P.-W.; Diner, D.J.; Kalashnikova, O.V.; Seidel, F.C.; Litvinov, P.; Bovchaliuk, A.; Garay, M.J.; van Harten, G.; et al. Joint retrieval of aerosol and water-leaving radiance from multispectral, multiangular and polarimetric measurements over ocean. Atmos. Meas. Tech. 2016, 9, 2877–2907. [Google Scholar] [CrossRef]
- Xu, F.; van Harten, G.; Diner, D.J.; Kalashnikova, O.V.; Seidel, F.C.; Bruegge, C.J.; Dubovik, O. Coupled retrieval of aerosol properties and land surface reflection using the Airborne Multiangle SpectroPolarimetric Imager. J. Geophys. Res. Atmos. 2017, 122, 7004–7026. [Google Scholar] [CrossRef]
- Cahalan, R.F.; Ridgway, W.; Wiscombe, W.J.; Bell, T.L.; Snider, J.B. The albedo of fractal stratocumulus clouds. J. Atmos. Sci. 1994, 51, 2434–2455. [Google Scholar] [CrossRef]
- Hou, W.; Wang, J.; Xu, X.; Reid, J.S.; Han, D. An algorithm for hyperspectral remote sensing of aerosols: 1. Development of theoretical framework. J. Quant. Spectrosc. Radiat. Transf. 2016, 178, 400–415. [Google Scholar] [CrossRef]
- Hou, W.; Wang, J.; Xu, X.; Reid, J.S. An algorithm for hyperspectral remote sensing of aerosols: 2. Information content analysis for aerosol parameters and principal components of surface spectra. J. Quant. Spectrosc. Radiat. Transf. 2017, 192, 14–29. [Google Scholar] [CrossRef]
- Dubovik, O. (University of Lille); Xu, F. (Jet Propulsion Laboratory). Personal communication, 2018.
- Dubovik, O. Optimization of numerical inversion in photopolarimetric remote sensing. In Photopolarimetry in Remote Sensing; Videen, G., Yatskiv, Y., Mishchenko, M., Eds.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2004; pp. 65–106. [Google Scholar]
- Dubovik, O.; King, M.D. A flexible inversion algorithm for retrieval of aerosol optical properties from Sun and sky radiance measurements. J. Geophys. Res. 2000, 105, 673–696. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain non-linear problems in Least Squares. Quart. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef]
- Marquardt, D. An algorithm for least-squares estimation of nonlinear parameters. SIAM J. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Xu, F.; Davis, A.B.; West, R.A.; Esposito, L.W. Markov chain formalism for polarized light transfer in plane-parallel atmospheres, with numerical comparison to the Monte Carlo method. Opt. Express 2010, 19, 946–967. [Google Scholar] [CrossRef] [PubMed]
- Lacis, A.A.; Hansen, J.E. A parameterization for the absorption of solar radiation in the Earth’s atmosphere. J. Atmos. Sci. 1974, 31, 118–133. [Google Scholar] [CrossRef]
- Dubovik, O.; Sinyuk, A.; Lapyonok, T.; Holben, B.N.; Mishchenko, M.; Yang, P.; Eck, T.F.; Volten, H.; Muñoz, O.; Veihelmann, B.; et al. Application of spheroid models to account for aerosol particle nonsphericity in remote sensing of desert dust. J. Geophys. Res. 2006, 111, D11208. [Google Scholar] [CrossRef]
- Rahman, H.; Pinty, B.; Verstraete, M.M. Coupled surface-atmosphere reflectance (CSAR) model 2. Semiempirical surface model usable with NOAA advanced very high resolution radiometer data. J. Geophys. Res. 1993, 98, 20791–20801. [Google Scholar] [CrossRef]
- Litvinov, P.; Hasekamp, O.; Cairns, B. Models for surface reflection of radiance and polarized radiance: Comparison with airborne multi-angle photopolarimetric measurements and implications for modeling top-of-atmosphere measurements. Remote Sens. Environ. 2011, 115, 781–792. [Google Scholar] [CrossRef]
- Van Harten, G.; Diner, D.J.; Daugherty, B.J.S.; Rheingans, B.E.; Bull, M.A.; Seidel, F.C.; Chipman, R.A.; Cairns, B.; Wasilewski, A.P.; Knobelspiesse, K.D. Calibration and validation of airborne multiangle spectropolarimetric imager (AirMSPI) polarization measurements. Appl. Opt. 2018, 57, 4499–4513. [Google Scholar] [CrossRef]
- Dubovik, O.; Smirnov, A.; Holben, B.N.; King, M.D.; Kaufman, Y.J.; Eck, T.F.; Slutsker, I. Accuracy assessment of aerosol optical properties retrieval from AERONET sun and sky radiance measurements. J. Geophys. Res. 2000, 105, 9791–9806. [Google Scholar] [CrossRef]
- Dubovik, O.; Lapyonok, T.; Litvinov, P.; Herman, M.; Fuertes, D.; Ducos, F.; Lopatin, A.; Chaikovsky, A.; Torres, B.; Derimian, Y.; et al. GRASP: A versatile algorithm for characterizing the atmosphere. SPIE Newsroom 2014, 25. [Google Scholar] [CrossRef]
- Lyapustin, A.; Martonchik, J.; Wang, Y.; Laszlo, I.; Korkin, S. Multiangle implementation of atmospheric correction (MAIAC): 1. Radiative transfer basis and look-up tables. J. Geophys. Res. Atmos. 2011, 116, D03210. [Google Scholar] [CrossRef]
- Lyapustin, A.; Wang, Y.; Laszlo, I.; Kahn, R.; Korkin, S.; Remer, L.; Levy, R.; Reid, J.S. Multiangle implementation of atmospheric correction (MAIAC): 2. Aerosol algorithm. J. Geophys. Res. Atmos. 2011, 116, D03211. [Google Scholar] [CrossRef]
- Baldridge, A.M.; Hook, S.J.; Grove, C.I.; Rivera, G. The ASTER spectral library version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Clark, R.N.; Swayze, G.A.; Wise, R.; Livo, E.; Hoefen, T.; Kokaly, R.; Sutley, S.J. USGS digital spectral library splib06a. USA Geol. Surv. Digit. Data Ser. 2007, 231, 2007. [Google Scholar]
- Levy, R.C.; Remer, L.A.; Mattoo, S.; Vermote, E.F.; Kaufman, Y.J. Second-generation operational algorithm: Retrieval of aerosol properties over land from inversion of moderate resolution imaging spectroradiometer spectral reflectance. J. Geophys. Res. 2007, 112, D13211. [Google Scholar] [CrossRef]
- Diner, D.J.; Beckert, J.C.; Reilly, T.H.; Bruegge, C.J.; Conel, J.E.; Kahn, R.; Martonchik, J.V.; Ackerman, T.P.; Davies, R.; Gerstl, S.A.W.; et al. Multiangle imaging spectro-radiometer (MISR) description and experiment overview. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1072–1087. [Google Scholar] [CrossRef]
















| Cv,tot | ffine | reff,fine | reff,coarse | nr,1 | nr,2 | nr,3 | nr,4 | ni,1 | ni,2 | ni,3 | ni,4 | Cv,sphere | |
| Cv,tot | 1.00 | −0.34 | −0.41 | 0.08 | −0.12 | −0.01 | 0.01 | 0.02 | −0.01 | −0.16 | −0.23 | −0.25 | 0.06 |
| ffine | - | 1.00 | 0.18 | 0.30 | −0.34 | −0.36 | −0.34 | −0.35 | 0.22 | 0.32 | 0.31 | 0.30 | 0.67 |
| reff,fine | - | - | 1.00 | −0.01 | −0.17 | −0.35 | −0.41 | −0.43 | −0.16 | -0.08 | −0.01 | −0.01 | −0.06 |
| reff,coarse | - | - | - | 1.00 | −0.01 | −0.01 | −0.01 | −0.01 | 0.25 | 0.23 | 0.21 | 0.20 | 0.25 |
| nr,1 | - | - | - | - | 1.00 | 0.94 | 0.88 | 0.84 | 0.33 | 0.31 | 0.28 | 0.28 | −0.29 |
| nr,2 | - | - | - | - | - | 1.00 | 0.98 | 0.96 | 0.28 | 0.22 | 0.18 | 0.17 | −0.28 |
| nr,3 | - | - | - | - | - | - | 1.00 | 0.99 | 0.24 | 0.16 | 0.12 | 0.11 | −0.26 |
| nr,4 | - | - | - | - | - | - | - | 1.00 | 0.21 | 0.12 | 0.08 | 0.08 | −0.28 |
| ni,1 | - | - | - | - | - | - | - | - | 1.00 | 0.95 | 0.90 | 0.87 | 0.23 |
| ni,2 | - | - | - | - | - | - | - | - | - | 1.00 | 0.98 | 0.96 | 0.29 |
| ni,3 | - | - | - | - | - | - | - | - | - | - | 1.00 | 0.99 | 0.25 |
| ni,4 | - | - | - | - | - | - | - | - | - | - | - | 1.00 | 0.23 |
| Cv,sphere | - | - | - | - | - | - | - | - | - | - | - | - | 1.00 |
| Cv,tot | ffine | reff,fine | reff,coarse | nr,1 | nr,2 | nr,3 | nr,4 | ni,1 | ni,2 | ni,3 | ni,4 | Cv,sphere | |
| Cv,tot | 1.00 | −0.32 | −0.37 | −0.05 | −0.43 | −0.41 | −0.42 | −0.40 | −0.52 | −0.54 | −0.54 | −0.54 | 0.39 |
| ffine | - | 1.00 | 0.23 | 0.42 | −0.12 | −0.06 | 0.02 | 0.09 | 0.62 | 0.59 | 0.57 | 0.56 | 0.45 |
| reff,fine | - | - | 1.00 | −0.07 | 0.20 | 0.18 | 0.17 | 0.14 | 0.26 | 0.28 | 0.27 | 0.26 | −0.01 |
| reff,coarse | - | - | - | 1.00 | 0.14 | 0.19 | 0.25 | 0.33 | 0.36 | 0.41 | 0.41 | 0.42 | 0.26 |
| nr,1 | - | - | - | - | 1.00 | 0.97 | 0.92 | 0.86 | 0.51 | 0.58 | 0.58 | 0.58 | −0.31 |
| nr,2 | - | - | - | - | - | 1.00 | 0.98 | 0.94 | 0.57 | 0.61 | 0.61 | 0.61 | −0.28 |
| nr,3 | - | - | - | - | - | - | 1.00 | 0.98 | 0.61 | 0.63 | 0.63 | 0.62 | −0.22 |
| nr,4 | - | - | - | - | - | - | - | 1.00 | 0.62 | 0.63 | 0.63 | 0.62 | −0.17 |
| ni,1 | - | - | - | - | - | - | - | - | 1.00 | 0.96 | 0.94 | 0.92 | 0.19 |
| ni,2 | - | - | - | - | - | - | - | - | - | 1.00 | 0.99 | 0.99 | 0.12 |
| ni,3 | - | - | - | - | - | - | - | - | - | - | 1.00 | 1.00 | 0.09 |
| ni,4 | - | - | - | - | - | - | - | - | - | - | - | 1.00 | 0.08 |
| Cv,sphere | - | - | - | - | - | - | - | - | - | - | - | - | 1.00 |
| Range | First Guess | Order of Finite Difference for Spectral Smoothness Constraints | Lagrange Regularization Factor | |
|---|---|---|---|---|
| Aerosol parameters (scene-averaged) | ||||
| Volume concentration of size components (Cv, 1-5, μm3/μm2) | [1.0 × 10−6,5] | 0.002 | - | - |
| Central height of aerosol distribution profile (ha, km) | [0.05,10] | 1 | - | - |
| Standard deviation of aerosol distribution profile (sa) | [0.5,2.5] | 0.75 | - | - |
| Real part of refractive index (nr(λ)) | [1.33,1.60] | 1.50 | 1 | 0.1 |
| Imaginary part of refractive index (ni(λ)) | [5.0 × 10−7,5.0 × 10−1] | 0.005 | 2 | 0.01 |
| Spherical particle volume fraction (fv,sphere) | [0.5,1.0] | 0.95 | - | - |
| Surface parameters (pixel-resolved) | ||||
| BRDF spectral weight (aλ) | [0,0.7] | 0.015–0.1 | 3 | 0.1 |
| Anisotropy parameter (kλ) | [0,1] | 0.6 | 1 | 0.5 |
| Anisotropy parameter (gλ) | [−1,1] | 0.1 | 1 | 0.5 |
| pBRDF weight (ελ) | [0,10] | 0.01 | - | - |
| Shadowing width (kγ) | [0,1] | 0.75 | 1 | 0.1 |
| Slope variance (σs ) | [0.05,0.5] | 0.075 | - | - |
| Initial Guess (PC 1) | Range (PC 1) | Initial Guess (PC 2) | Range (PC 2) | Order of Finite Difference for Spectral Smoothness Constraints | Lagrange Multiplier | Order of Finite Difference for Spatial Smoothness Constraints | Lagrange Multiplier | |
|---|---|---|---|---|---|---|---|---|
| log(Cv, 1-5) | 0.1–0.6 | [−0.75,+0.75] | −3 × 10−1–7 × 10−1 | [−1,+1] | - | - | 1 | 1 |
| log(ha) | ≈−1 × 10−1 | [−0.9,+0.9] | ≈5 × 10−1 | [−1,+1] | - | - | 1 | 0.01 |
| log(sa) | ≈−2 × 10−2 | [−0.4,+0.4] | ≈7 × 10−2 | [−0.4,+0.4] | - | - | 1 | 0.01 |
| log(nr(λ)) | ≈3 × 10−3 | [−0.1,+0.1] | ≈5 × 10−3 | [−0.1,+0.1] | 1 | 0.1 | 1 | 10 |
| log(ni(λ)) | ≈−2 × 10−2 | [−0.1,+0.1] | ≈2 × 10−2 | [−0.1,+0.1] | 2 | 0.01 | 1 | 1 |
| log(fv,sphere) | ≈6 × 10−3 | [−0.05,+0.05] | ≈4 × 10−3 | [−0.05,+0.05] | - | - | 1 | 0.1 |
| Initial Guess | Range (in log-space) | Order of Finite Difference for Spectral Smoothness Constraints on First (Second) PC Vectors | Lagrange Multiplier on First (Second) PC Vectors | Order of Finite Difference for Spatial Smoothness Constraints on First (Second) PC weight | Lagrange Multiplier on PC Weights | |
|---|---|---|---|---|---|---|
| log(Cv, 1-5) | −0.3–0.7 | [−1,+1] | - | - | - | - |
| log(ha) | ≈5 × 10−1 | [−1,+1] | - | - | - | - |
| log(sa) | ≈7 × 10−2 | [−0.4,+0.4] | - | - | - | - |
| log(nr(λ)) | ≈5 × 10−3 | [−0.1,+0.1] | 1(1) | 0.01(0.001) | - | - |
| log(ni(λ)) | ≈2.5 × 10−2 | [−0.01,+0.01] | 2(2) | 0.001(0.00001) | - | - |
| log(fv,sphere) | ≈4 × 10−3 | [−0.05,+0.05] | - | - | 1(1) | 0.05(0.005) |
| wp | 0 | [−10,10] | - | - | 1(1) | 0.05(0.005) |
| Parameters | Correlated Multi-pixel Inversion | Original Multi-pixel Inversion | ||
|---|---|---|---|---|
| MAD | R2 | MAD | R2 | |
| AOD355 nm | 0.058 | 0.917 | 0.040 | 0.925 |
| AOD445 nm | 0.035 | 0.927 | 0.024 | 0.955 |
| AOD470 nm | 0.030 | 0.933 | 0.021 | 0.960 |
| AOD555 nm | 0.020 | 0.933 | 0.016 | 0.960 |
| AOD660 nm | 0.016 | 0.922 | 0.013 | 0.959 |
| AOD865 nm | 0.015 | 0.815 | 0.014 | 0.851 |
| SSA445 nm | 0.035 | - | 0.030 | - |
| SSA555 nm | 0.036 | - | 0.030 | - |
| SSA660 nm | 0.040 | - | 0.032 | - |
| SSA865 nm | 0.041 | - | 0.035 | - |
| nr,445 nm | 0.052 | - | 0.039 | - |
| nr,555 nm | 0.051 | - | 0.039 | - |
| nr,660 nm | 0.046 | - | 0.036 | - |
| nr,865 nm | 0.038 | - | 0.037 | - |
| ni,445 nm | 0.004 | - | 0.004 | - |
| ni,555 nm | 0.004 | - | 0.004 | - |
| ni,660 nm | 0.005 | - | 0.004 | - |
| ni,865 nm | 0.005 | - | 0.005 | - |
| reff,fine (μm) | 0.024 | - | 0.022 | - |
| reff,coarse (μm) | 1.050 | - | 0.993 | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Diner, D.J.; Dubovik, O.; Schechner, Y. A Correlated Multi-Pixel Inversion Approach for Aerosol Remote Sensing. Remote Sens. 2019, 11, 746. https://doi.org/10.3390/rs11070746
Xu F, Diner DJ, Dubovik O, Schechner Y. A Correlated Multi-Pixel Inversion Approach for Aerosol Remote Sensing. Remote Sensing. 2019; 11(7):746. https://doi.org/10.3390/rs11070746
Chicago/Turabian StyleXu, Feng, David J. Diner, Oleg Dubovik, and Yoav Schechner. 2019. "A Correlated Multi-Pixel Inversion Approach for Aerosol Remote Sensing" Remote Sensing 11, no. 7: 746. https://doi.org/10.3390/rs11070746
APA StyleXu, F., Diner, D. J., Dubovik, O., & Schechner, Y. (2019). A Correlated Multi-Pixel Inversion Approach for Aerosol Remote Sensing. Remote Sensing, 11(7), 746. https://doi.org/10.3390/rs11070746