Detection and Validation of Tropical Peatland Flaming and Smouldering Using Landsat-8 SWIR and TIRS Bands



Abstract
1. Introduction
2. Materials and Methods
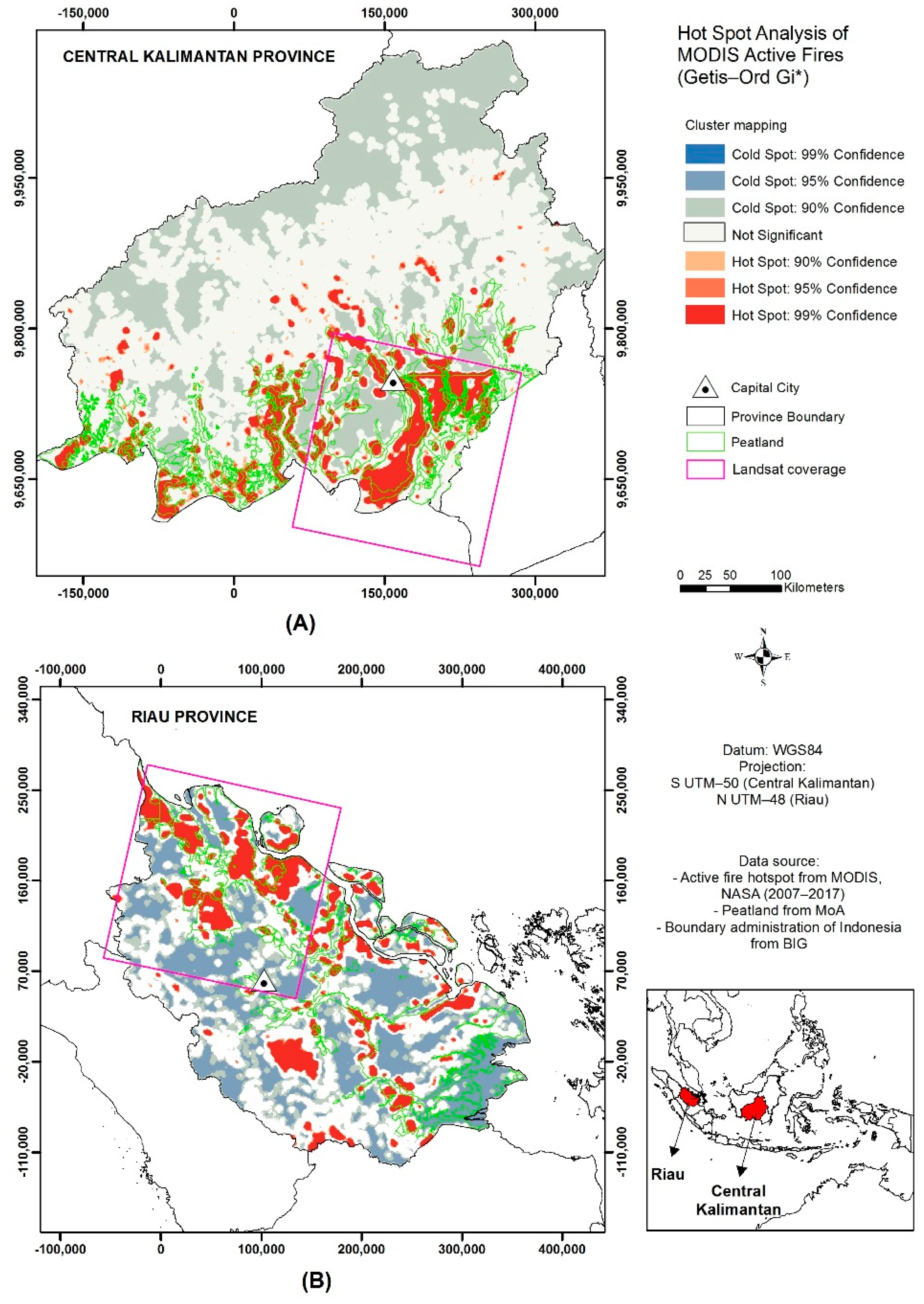
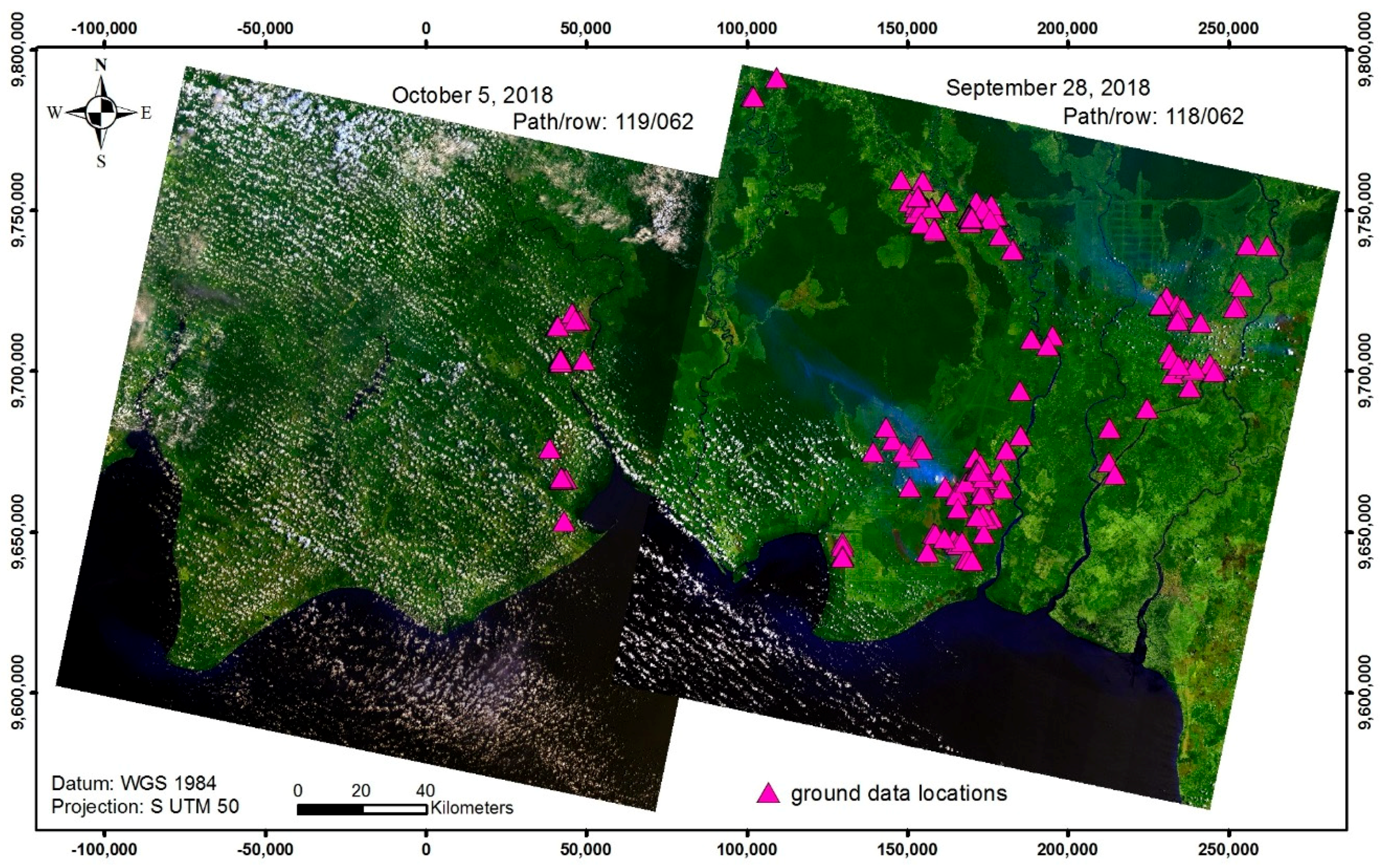
2.1. Study Site
2.2. Data
2.3. Pre-processing of Landsat-8 Data
2.4. Separation of Combustion Area and Non-Combustion Area
2.5. Smoke Haze Distribution
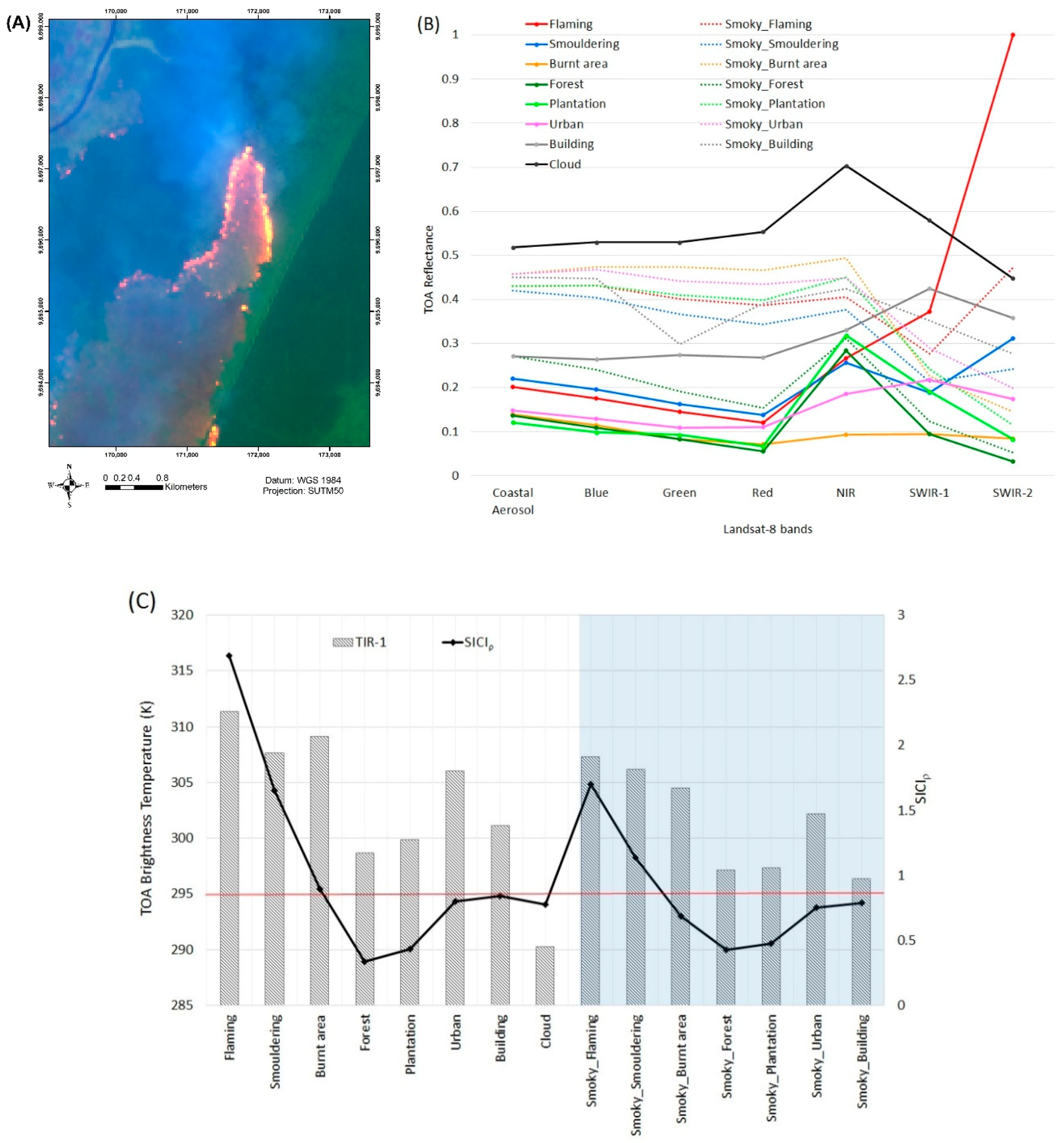
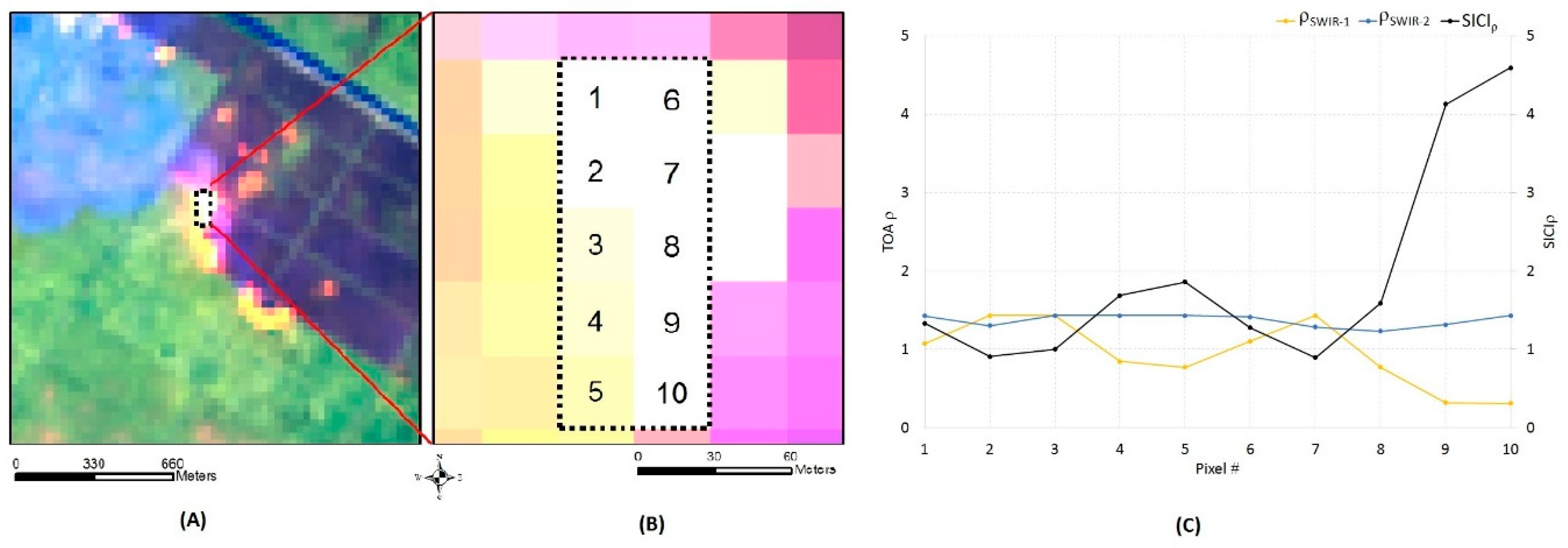
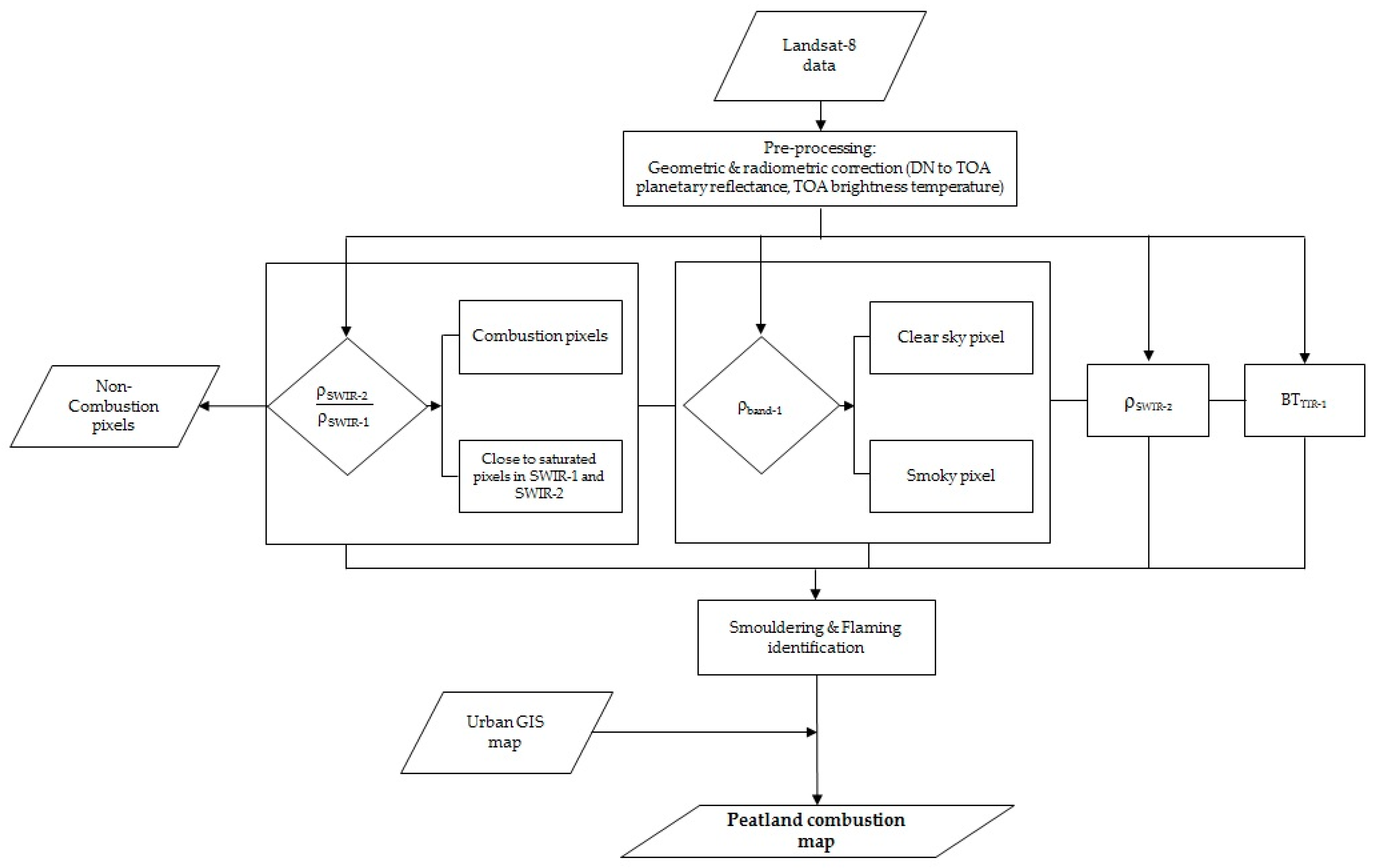
2.6. Tropical Peatland Combustion Algorithm
2.7. Comparison with the Previous Landsat-8 Active Fire of Global Operational Land Imager
2.8. Validation with Ground Truth
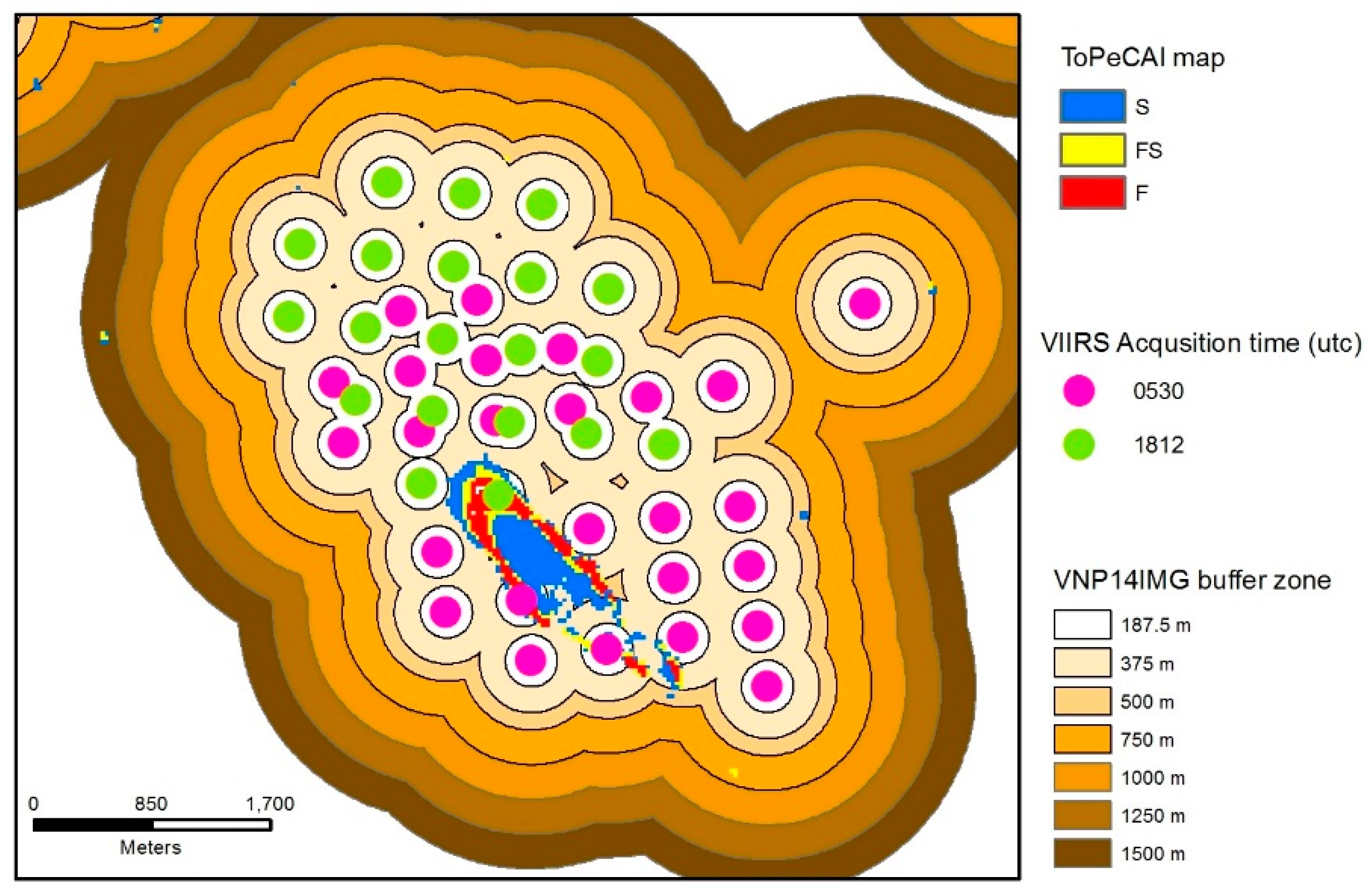
2.9. Comparison with the 375 m Visible Infrared Imaging Radiometer Suite Active Fire Product
3. Results
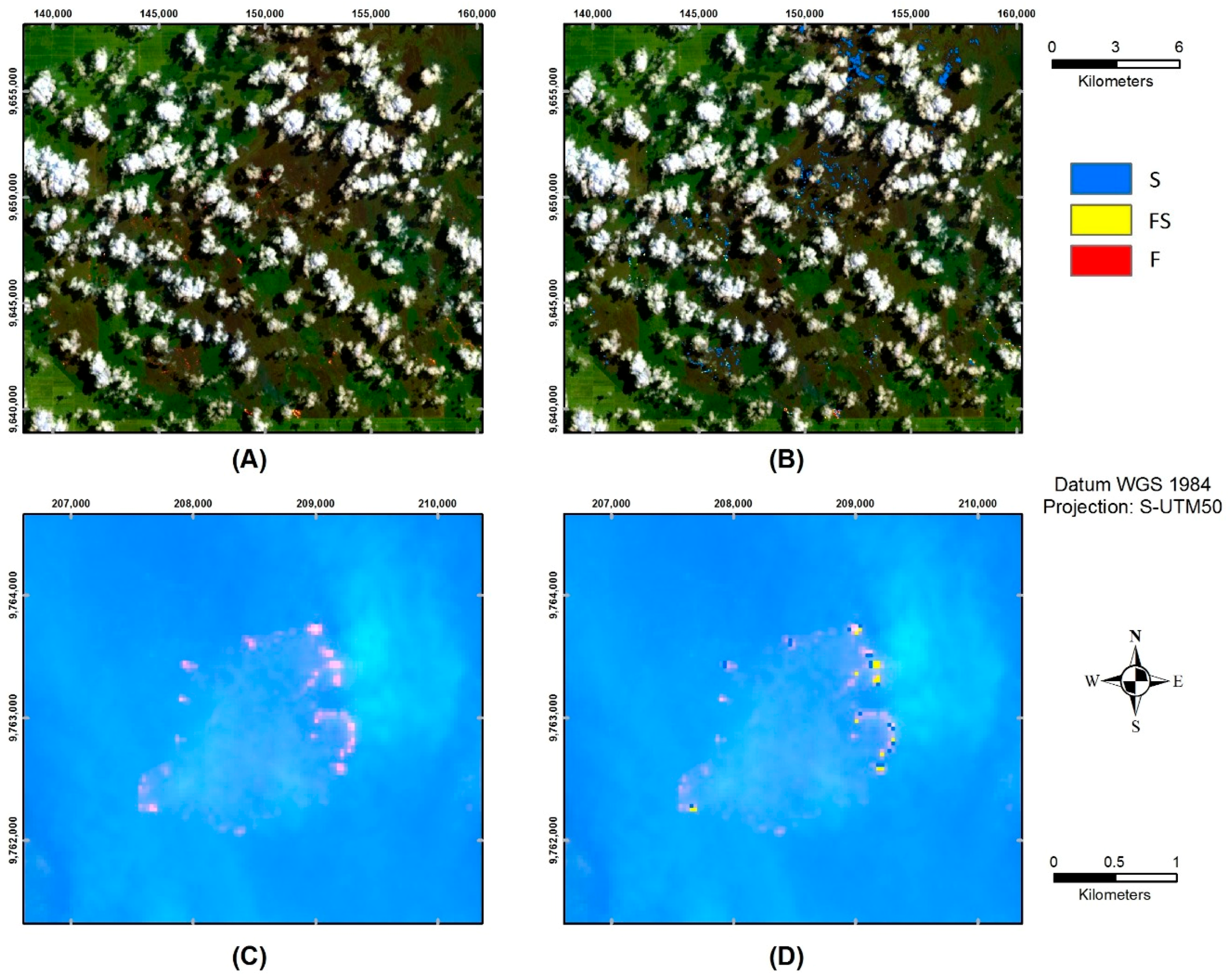
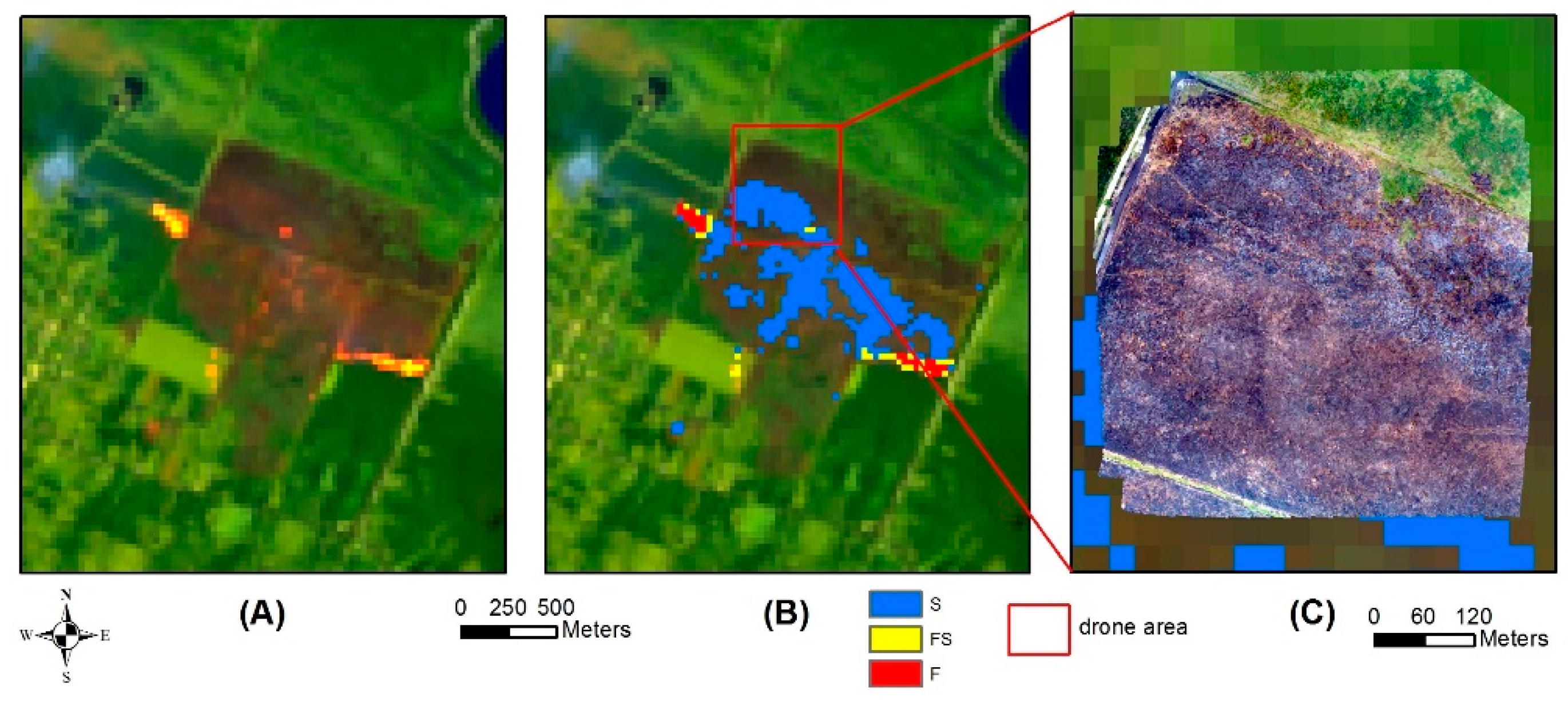
3.1. Implementation of Tropical Peatland Combustion Algorithm
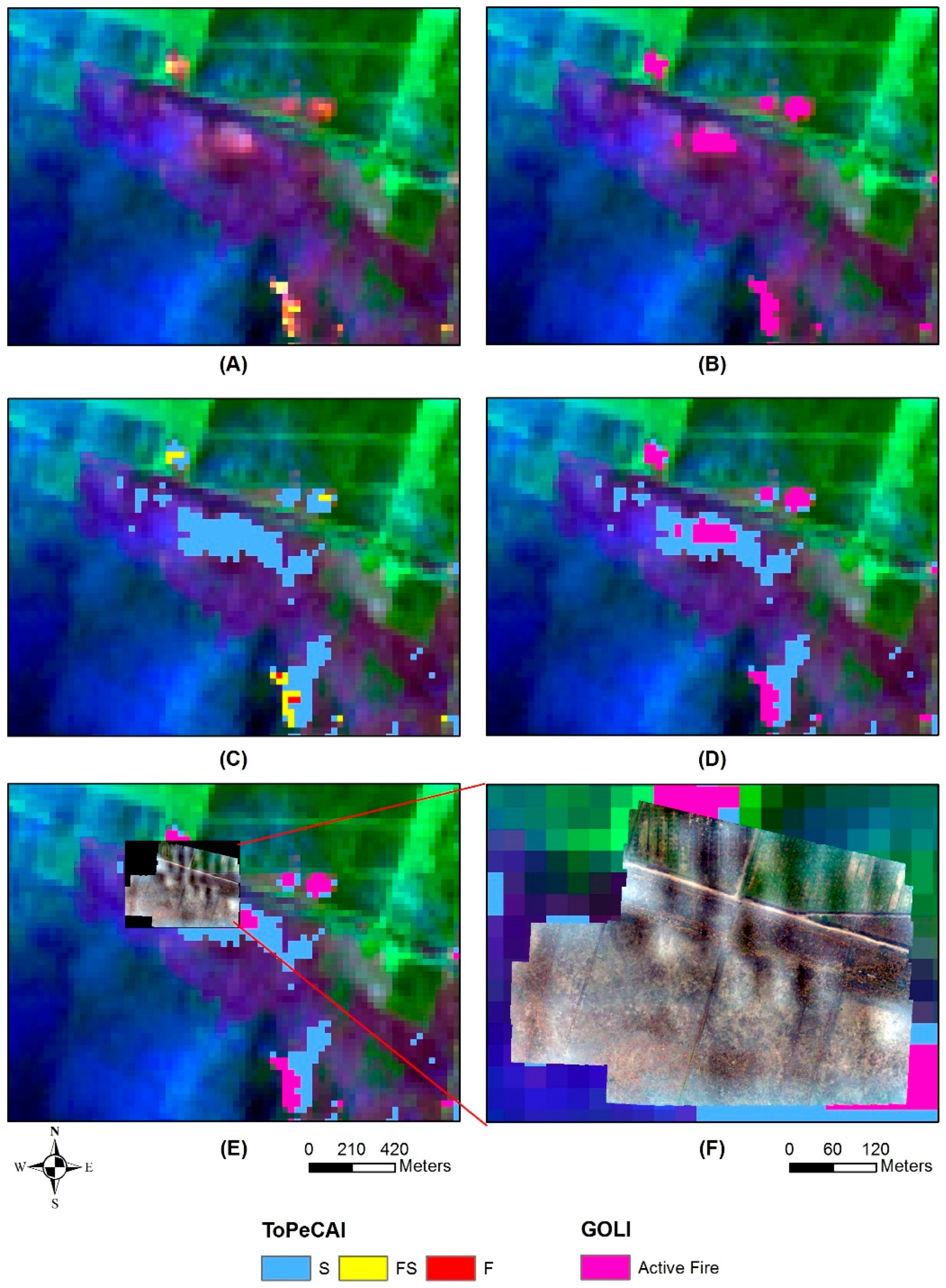
3.2. Comparison of Tropical Peatland Combustion Algorithm with Global Operational Land Imager Results
3.3. Validation of Tropical Peatland Combustion Algorithm Mapping
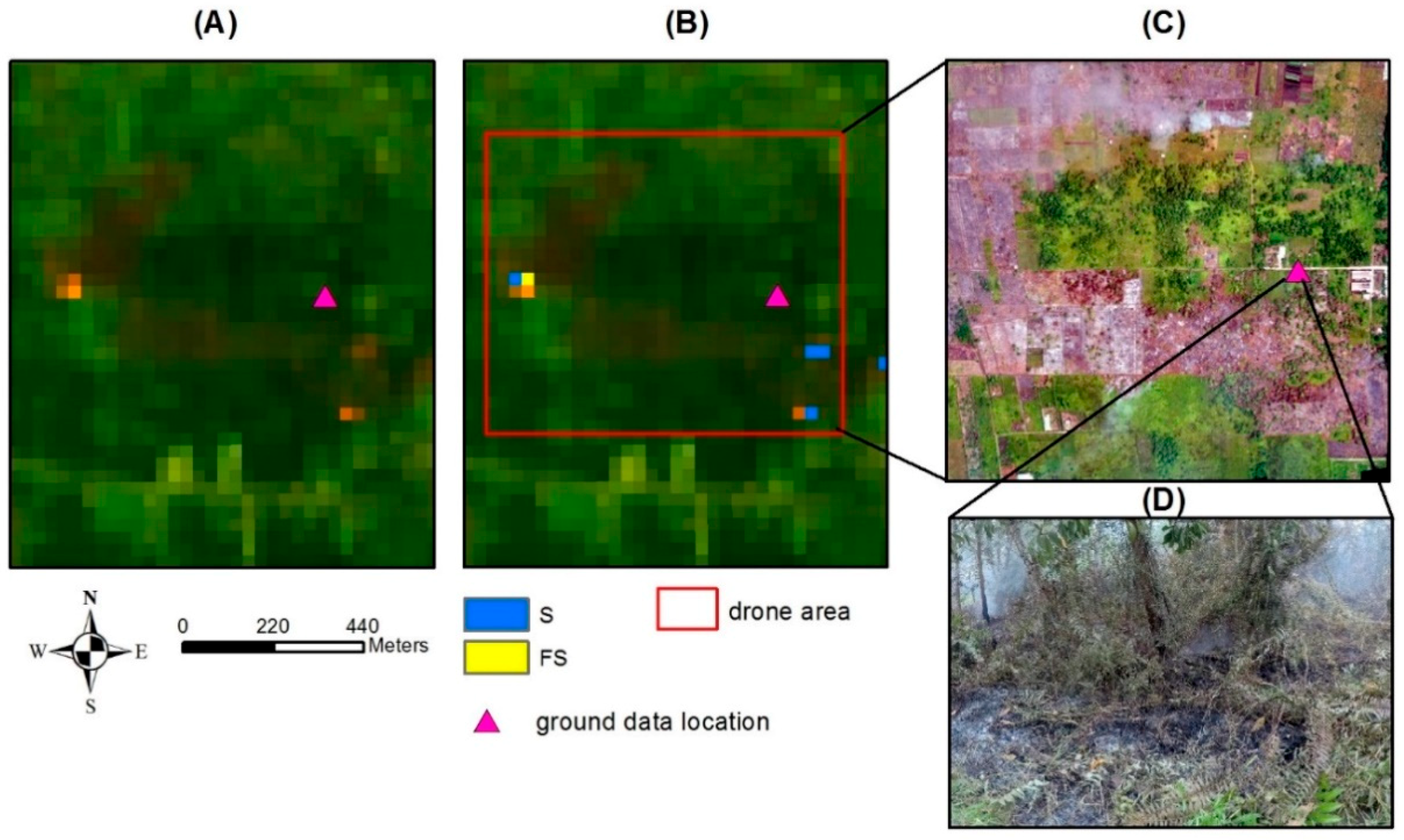
3.3.1. Internal Validation in Central Kalimantan Province
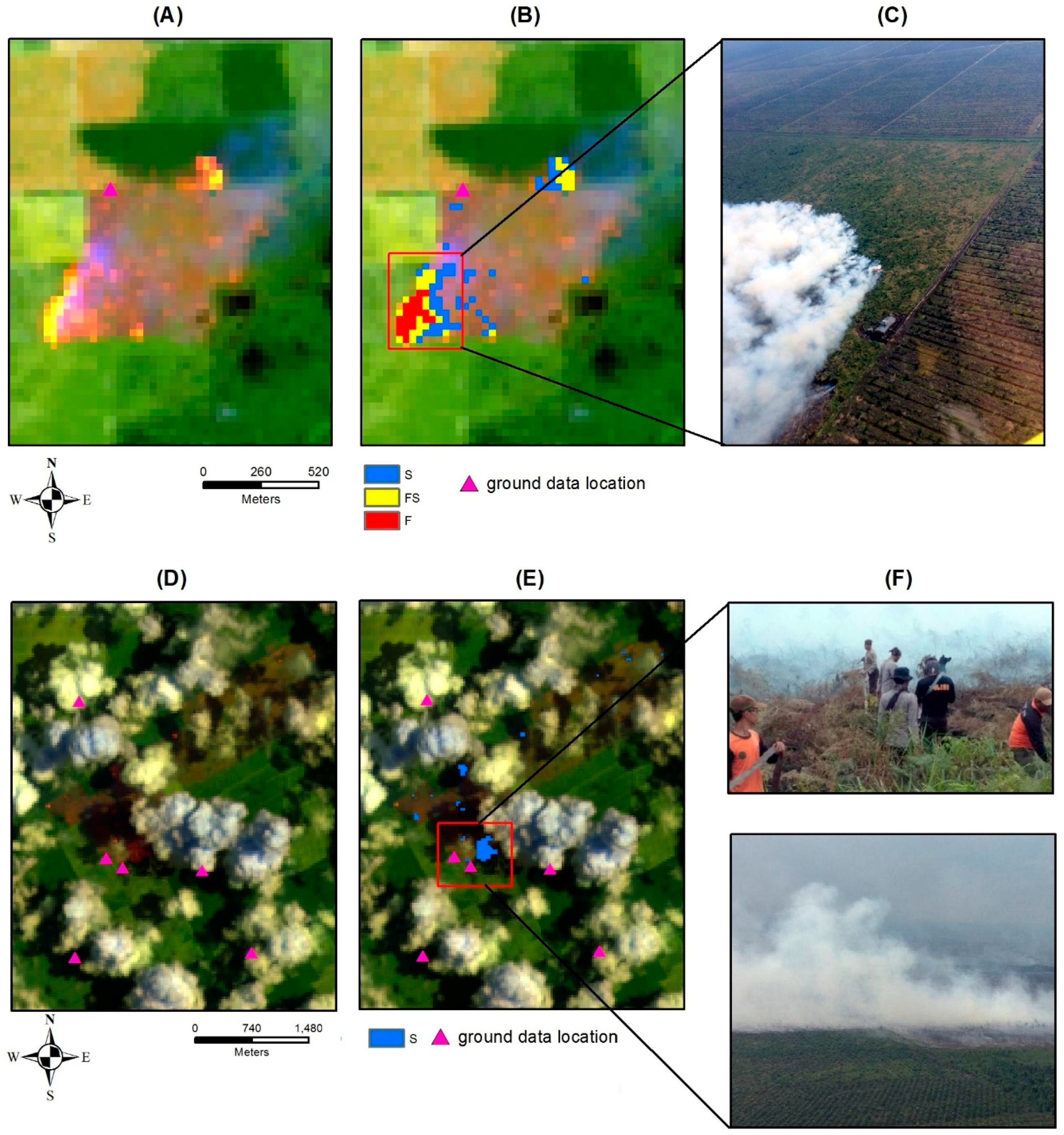
3.3.2. External Validation in Riau Province
3.3.3. Statistical Assessment of Tropical Peatland Combustion Algorithm Validation
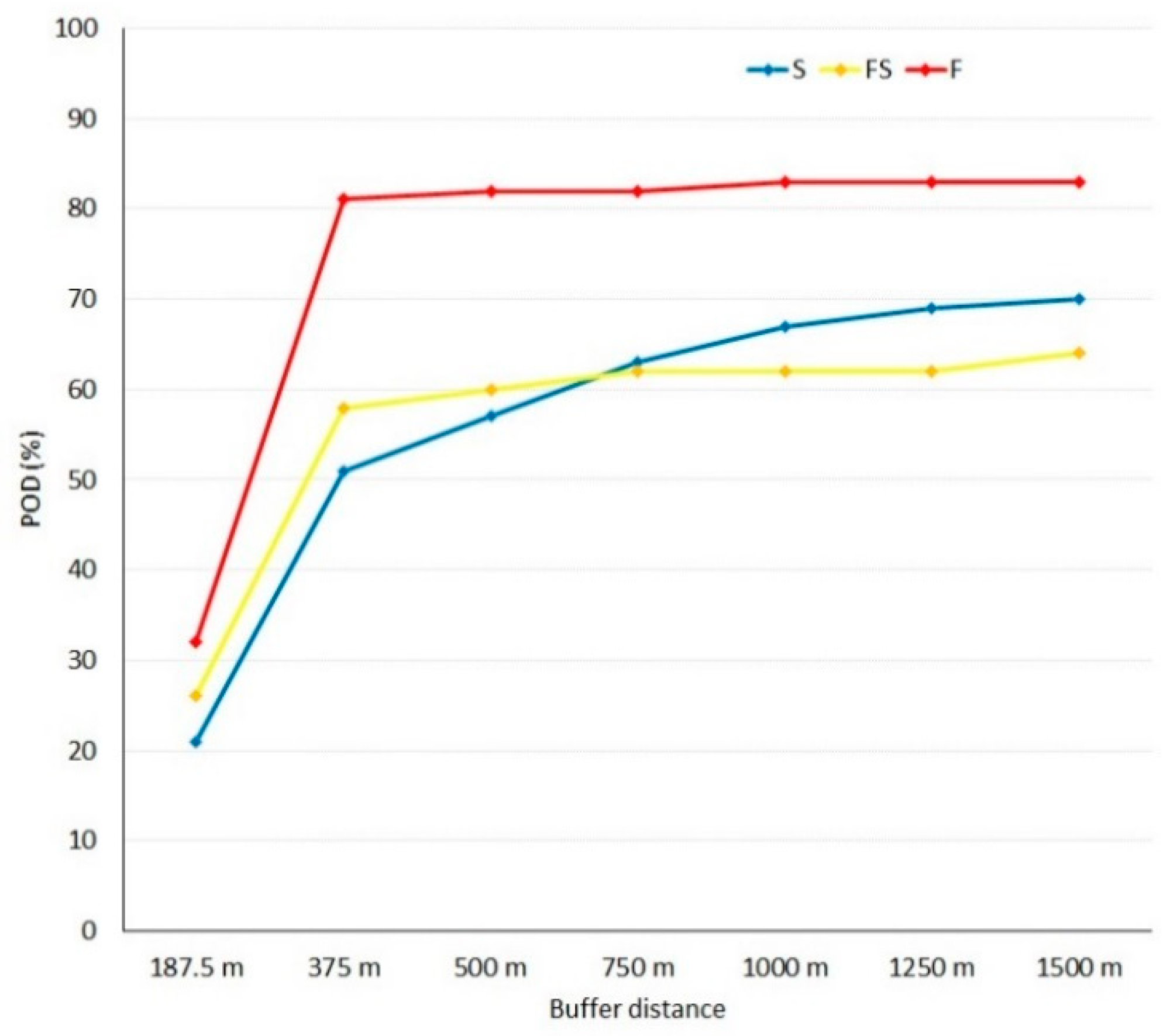
3.3.4. Statistical Assessment of the 375 m Visible Infrared Imaging Radiometer Suite Active Fire Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Name | Band Width (µm) | Center Wavelength (µm) | Saturation | |
|---|---|---|---|---|
| Radiance (Wm−2sr−1µm−1) | Temperature (K) | |||
| Band-1: coastal/aerosol | 0.435–0.451 | 0.443 | 950 | - |
| Band-2: blue | 0.452–0.512 | 0.482 | 800 | - |
| Band-3: green | 0.533–0.590 | 0.561 | 760 | - |
| Band-4: red | 0.636–0.673 | 0.655 | 740 | - |
| Band-5: NIR | 0.851–0.879 | 0.865 | 500 | - |
| Band-6: SWIR-1 | 1.566–1.651 | 1.609 | 96 | - |
| Band-7: SWIR-2 | 2.107–2.294 | 2.201 | 29 | - |
| Band-10: TIR-1 | 10.61–11.19 | 10.9 | 20.5 | 360 |
| Band-11: TIR-2 | 11.50–-12.51 | 12.0 | 17.8 | 360 |
References
- Justice, C.; Giglio, L.; Korontzi, S.; Owens, J.; Morisette, J.; Roy, D.; Descloitres, J.; Alleaume, S.; Petitcolin, F.; Kaufman, Y. The MODIS fire products. Remote Sens. Environ. 2002, 83, 244–262. [Google Scholar] [CrossRef]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Vadrevu, K.P.; Justice, C.O.; Wind, B. Active fires from the Suomi NPP visible infrared imaging radiometer suite: Product status and first evaluation results. J. Geophys. Res. Atmos. 2014, 119, 803–816. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [PubMed]
- Page, S.E.; Rieley, J.; Banks, C. Global and regional importance of the tropical peatland carbon pool. Glob. Chang. Biol. 2011, 17, 798–818. [Google Scholar] [CrossRef]
- Rieley, J.; Page, S. Tropical Peatland of the World; Springer: Tokyo, Japan, 2016. [Google Scholar]
- Osaki, M.; Nursyamsi, D.; Noor, M.; Wahyunto; Segah, H. Peatland in Indonesia. In Tropical Peatland Ecosystems, 1st ed.; Osaki, M., Tsuji, N., Eds.; Springer: Tokyo, Japan, 2016; pp. 49–58. [Google Scholar]
- Tacconi, L. Fires in Indonesia: Causes, Costs and Policy Implications; CIFOR: Bogor, Indonesia, 2003. [Google Scholar]
- World-Bank. The Cost of Fire: An Economic Analysis of Indonesia’s 2015 Fire Crisis; World Bank Group: Jakarta, Indonesia, 2016; Available online: http://pubdocs.worldbank.org/en/643781465442350600/Indonesia-forest-fire-notes.pdf (accessed on 8 April 2017).
- Purnomo, H.; Shantiko, B.; Sitorus, S.; Gunawan, H.; Achdiawan, R.; Kartodihardjo, H.; Dewayani, A.A. Fire economy and actor network of forest and land fires in Indonesia. For. Policy Econ. 2017, 78, 21–31. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; Roberts, G.; Freeborn, P. New GOES imager algorithms for cloud and active fire detection and fire radiative power assessment across north, south and central America. Remote Sens. Environ. 2010, 114, 1876–1895. [Google Scholar] [CrossRef]
- Filizzola, C.; Corrado, R.; Marchese, F.; Mazzeo, G.; Paciello, R.; Pergola, N.; Tramutoli, V. RST-fires, an exportable algorithm for early-fire detection and monitoring: Description, implementation, and field validation in the case of the MSG-SEVIRI sensor. Remote Sens. Environ. 2016, 186, 196–216. [Google Scholar] [CrossRef]
- Fuller, D.O. Satellite remote sensing of biomass burning with optical and thermal sensors. Prog. Phys. Geogr. 2000, 24, 543–561. [Google Scholar] [CrossRef]
- Langner, A.; Siegert, F. Spatiotemporal fire occurrence in Borneo over a period of 10 years. Glob. Chang. Biol. 2009, 15, 48–62. [Google Scholar] [CrossRef]
- Caúla, R.H.; Oliveira-Júnior, J.F.; Lyra, G.B.; Delgado, R.C.; Heilbron Filho, P.F.L. Overview of fire foci causes and locations in Brazil based on meteorological satellite data from 1998 to 2011. Environ. Earth Sci. 2015, 74, 1497–1508. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I. The new VIIRS 375 m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S. Assessment of the utility of the advanced Himawari imager to detect active fire over Australia. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 65–71. [Google Scholar] [CrossRef]
- BNPB (Central Kalimantan Province, Indonesia). Personal Communication, 2018.
- Rein, G. Smoldering combustion. In SFPE Handbook of Fire Protection Engineering; Springer: New York, NY, USA, 2016; pp. 581–603. [Google Scholar]
- Hawbaker, T.J.; Radeloff, V.C.; Syphard, A.D.; Zhu, Z.; Stewart, S.I. Detection rates of the modis active fire product in the United States. Remote Sens Environ. 2008, 112, 2656–2664. [Google Scholar] [CrossRef]
- Hantson, S.; Padilla, M.; Corti, D.; Chuvieco, E. Strengths and weaknesses of modis hotspots to characterize global fire occurrence. Remote Sens Environ. 2013, 131, 152–159. [Google Scholar] [CrossRef]
- Loboda, T.V.; Csiszar, I.A. Reconstruction of fire spread within wildland fire events in northern Eurasia from the MODIS active fire product. Glob. Planet. Chang. 2007, 56, 258–273. [Google Scholar] [CrossRef]
- Jones, S.; Hally, B.; Reinke, K.; Wickramasinghe, C.; Wallace, L.; Engel, C. Next Generation Fire Detection from Geostationary Satellites. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 5465–5468. [Google Scholar]
- Rein, G. Smouldering fires and natural fuels. In Fire Phenomena and the Earth System: An Interdisciplinary Guide to Fire Science; Belcher, Ed.; Wiley and Sons: Hoboken, NJ, USA, 2013; Chapter 2; pp. 13–22. [Google Scholar]
- Zaccone, C.; Rein, G.; D’Orazio, V.; Hadden, R.M.; Belcher, C.M.; Miano, T.M. Smouldering fire signatures in peat and their implications for palaeoenvironmental reconstructions. Geochim. Cosmochim. Acta 2014, 137, 134–146. [Google Scholar] [CrossRef]
- Koppmann, R.; von Czapiewski, K.; Reid, J.S. A review of biomass burning emissions, part I: Gaseous emissions of carbon monoxide, methane, volatile organic compounds, and nitrogen containing compounds. Atmos. Chem. Phys. Discuss. 2005, 5, 10455–10516. [Google Scholar] [CrossRef]
- Reid, J.S.; Koppmann, R.; Eck, T.F.; Eleuterio, D.P. A review of biomass burning emissions part II: Intensive physical properties of biomass burning particles. Atmos. Chem. Phys. 2005, 5, 799–825. [Google Scholar] [CrossRef]
- Giglio, L.; Kendall, J.D. Application of the dozier retrieval to wildfire characterization: A sensitivity analysis. Remote Sens Environ. 2001, 77, 34–49. [Google Scholar] [CrossRef]
- Kelhä, V.; Rauste, Y.; Häme, T.; Sephton, T.; Buongiorno, A.; Frauenberger, O.; Soini, K.; Venäläinen, A.; Miguel-Ayanz, J.S.; Vainio, T. Combining AVHRR and ATSR satellite sensor data for operational boreal forest fire detection. Int. J. Remote Sens. 2003, 24, 1691–1708. [Google Scholar] [CrossRef]
- Murphy, S.W.; de Souza Filho, C.R.; Wright, R.; Sabatino, G.; Correa Pabon, R. Hotmap: Global hot target detection at moderate spatial resolution. Remote Sens. Environ. 2016, 177, 78–88. [Google Scholar] [CrossRef]
- Siegert, F.; Zhukov, B.; Oertel, D.; Limin, S.; Page, S.E.; Rieley, J.O. Peat fires detected by the BIRD satellite. Int. J. Remote Sens. 2004, 25, 3221–3230. [Google Scholar] [CrossRef]
- Mitchell, S.; Jones, S.; Reinke, K.; Lorenz, E.; Reulke, R. Assessing the utility of the TET-1 hotspot detection and characterization algorithm for determining wildfire size and temperature. Int. J. Remote Sens. 2016, 37, 4731–4747. [Google Scholar] [CrossRef]
- Atwood, E.; Englhart, S.; Lorenz, E.; Halle, W.; Wiedemann, W.; Siegert, F. Detection and characterization of low temperature peat fires during the 2015 fire catastrophe in indonesia using a new high-sensitivity fire monitoring satellite sensor (FireBird). PLoS ONE 2016, 11, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Eckmann, T.; Roberts, D.; Still, C. Estimating subpixel fire sizes and temperatures from aster using multiple endmember spectral mixture analysis. Int. J. Remote Sens. 2009, 30, 5851–5864. [Google Scholar] [CrossRef]
- Giglio, L.; Csiszar, I.; Restás, Á.; Morisette, J.T.; Schroeder, W.; Morton, D.; Justice, C.O. Active fire detection and characterization with the advanced spaceborne thermal emission and reflection radiometer (ASTER). Remote Sens. Environ. 2008, 112, 3055–3063. [Google Scholar] [CrossRef]
- Polivka, T.N.; Jun Wang, L.T.; Ellison, E.J.; Hyer, C.M.; Ichoku, C.M. Improving nocturnal fire detection with the VIIRS day–night band. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5503–5519. [Google Scholar] [CrossRef]
- Wooster, M.J.; Xu, W.; Nightingale, T. Sentinel-3 SLSTR active fire detection and FRP product: Pre-launch algorithm development and performance evaluation using MODIS and ASTER datasets. Remote Sens. Environ. 2012, 120, 236–254. [Google Scholar] [CrossRef]
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS active fire detection products using ASTER and ETM+ data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Morisette, J.; Giglio, L.; Csiszar, I.; Justice, C. Validation of the MODIS active fire product over southern Africa with ASTER data. Int. J. Remote Sens. 2005, 26, 4239–4264. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active fire detection using Landsat-8/OLI data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef]
- Dennison, P.E.; Roberts, D.A. Daytime fire detection using airborne hyperspectral data. Remote Sens. Environ. 2009, 113, 1646–1657. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.; Baugh, K.; Khomarudin, M.; Vetrita, Y.; Sofan, P.; Suwarsono; Hilman, D. Long-wave infrared identification of smoldering peat fires in Indonesia with nighttime Landsat data. Environ. Res. Lett. 2015, 10, 065002. [Google Scholar] [CrossRef]
- Kumar, S.S.; Roy, D.P. Global operational land imager Landsat-8 reflectance-based active fire detection algorithm. Int. J. Digit. Earth 2018, 11, 154–178. [Google Scholar] [CrossRef]
- BPS-Statistic Central Kalimantan Province. Kalimantan Tengah in Figures 2018. Available online: https://kalteng.bps.go.id/publication/2018/08/16/ceed046d35684aefde786f04/provinsi-kalimantan-tengah-dalam-angka-2018.html (accessed on 16 August 2018).
- BPS-Statistic Indonesia. Plantation Area by Province and Crops, Indonesia (000 ha), 2012–2015. 2015. Available online: https://www.neliti.com/publications/52029/plantation-area-by-province-and-crops-indonesia-000-ha-2012-2015 (accessed on 10 December 2017).
- Getis, A.; Ord, J.K. The analysis of spatial association by use of distance statistics. In Perspectives on Spatial Data Analysis; Springer: Berlin/Heidelberg, Germany, 1992; pp. 189–206. [Google Scholar]
- Mitchell, A. The ESRI Guide to GIS Analysis, 1st ed.; ESRI: Redlands, CA, USA, 1999. [Google Scholar]
- BPS-Statistic Riau Province. Riau Province in Figures 2018. Available online: https://riau.bps.go.id/publication/2018/08/16/b3aeccc52eab08744fbd1ddf/provinsi-riau-dalam-angka-2018.html (accessed on 6 September 2018).
- Ritung, S.; Wahyunto, N.K. Karakteristik dan sebaran lahan gambut di Sumatera, Kalimantan dan Papua. In Pengelolaan Lahan Gambut Berkelanjutan; Balai Besar Litbang SDLP: Bogor, Indonesia, 2012. (In Bahasa) [Google Scholar]
- Sofan, P.; Bruce, D.; Jones, E.; Marsden, J. Detecting peatland combustion using shortwave and thermal infrared Landsat-8 data. In Advance Forest Fire Research; Imprensa da Universidade de Coimbra: Coimbra, Portugal, 2018; pp. 969–979. [Google Scholar]
- Petitcolin, F.; Vermote, E. Land surface reflectance, emissivity and temperature from MODIS middle and thermal infrared data. Remote Sens. Environ. 2002, 83, 112–134. [Google Scholar] [CrossRef]
- Nikam, B.R.; Ibragimov, F.; Chouksey, A.; Garg, V.; Aggarwal, S.P. Retrieval of land surface temperature from Landsat 8 TIRS for the command area of mula irrigation project. Environ. Earth Sci. 2016, 75, 1169. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jimenez-Munoz, J.C.; Soria, G.; Romaguera, M.; Guanter, L.; Moreno, J.; Plaza, A.; Martinez, P. Land surface emissivity retrieval from different VNIR and TIR sensors. IEEE Trans. Geosci. Remote Sens. 2008, 46, 316–327. [Google Scholar] [CrossRef]
- Guillevic, P.; Göttsche, F.; Nickeson, J.; Hulley, G.; Ghent, D.; Yu, Y.; Trigo, I.; Hook, S.; Sobrino, J.A.; Remedios, J.; et al. Land Surface Temperature Product Validation Best Practice Protocol. Land Product Validation Subgroup (WGCV/CEOS). 2018. Available online: https://lpvs.gsfc.nasa.gov/PDF/CEOS_LST_PROTOCOL_Feb2018_v1.1.0_light.pdf (accessed on 25 December 2018).
- Marchetti, D. A physics exhibit to show the effect of the aerosol in the atmosphere on electromagnetic wave propagation. Procedia Soc. Behav. Sci. 2015, 174, 2975–2982. [Google Scholar] [CrossRef]
- Morfitt, R.; Barsi, J.; Levy, R.; Markham, B.; Micijevic, E.; Ong, L.; Scaramuzza, P.; Vanderwerff, K. Landsat-8 operational land imager (OLI) radiometric performance on-orbit. Remote Sens. 2015, 7, 2208–2237. [Google Scholar] [CrossRef]
- Aufaristama, M.; Hoskuldsson, A.; Jonsdottir, I.; Ulfarsson, M.O.; Thordarson, T. New insights for detecting and deriving thermal properties of lava flow using infrared satellite during 2014–2015 effusive eruption at holuhraun, iceland. Remote Sens. 2018, 10, 151. [Google Scholar] [CrossRef]
- Stanski, H.R.; Wilson, L.J.; Burrows, W.R. Survey of Common Verification Methods in Meteorology; World Meteorological Organization: Geneva, Switzerland, 1989. [Google Scholar]
- Stefano Mariani, M.C. Forecast Verification: A Summary of Common Approaches, and Examples of Application; University of Trento: Trento, Italy, 2008. [Google Scholar]
- Schroeder, W. Visible Infrared Imaging Radiometer Suite (VIIRS) 375 m & 750 m Active Fire Detection Data Sets Based on Nasa VIIRS Land Science Investigator Processing System (SIPS) Reprocessed Data-Version 1. NASA, 2017. Available online: https://lpdaac.usgs.gov/sites/default/files/public/product_documentation/vnp14_user_guide_v1.3.pdf (accessed on 12 December 2018).
- USGS. Landsat 8 (L8) Data Users Handbook. LSDS-1574 Version 3.0 ed.; South Dakota, U.S.; 2018. Available online: https://landsat.usgs.gov/landsat-8-data-users-handbook (accessed on 28 November 2018).
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat data continuity mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]













| Acquisition Date | Path-Row | Study Site | Utilised for | Cloud Cover (over Land) | Haze Condition |
|---|---|---|---|---|---|
| 3 August 2015 | 118-062 | Central Kalimantan | development | 1.48% | no haze |
| 19 August 2015 | 118-062 | Central Kalimantan | development | 1.96% | thin smoke haze |
| 4 September 2015 | 118-062 | Central Kalimantan | development | 47.2% | medium smoke haze |
| 20 September 2015 | 118-062 | Central Kalimantan | development | 96.07% | thick smoke haze |
| 22 October 2015 | 118-062 | Central Kalimantan | development | 99.69% | thick smoke haze |
| 28 September 2018 | 118-062 | Central Kalimantan | internal validation | 3.96% | thin smoke haze |
| 5 October 2018 | 119-062 | Central Kalimantan | internal validation | 40.50% | thin smoke haze |
| 20 August 2016 | 127-059 | Riau | external validation | 29.08% | thin smoke haze |
| 4 April 2018 | 127-059 | Riau | external validation | 38.67% | thin smoke haze |
| 7 July 2018 | 126-059 | Riau | external validation | 77.55% | medium smoke haze |
| 7 July 2018 | 126-060 | Riau | external validation | 43.29% | medium smoke haze |
| Object | Clear Sky (Pixel) | Smoky (Pixel) |
|---|---|---|
| Flaming | 584 | 1,143 |
| Smouldering | 515 | 1,347 |
| Burnt area | 9,068 | 5,107 |
| Forest | 211,501 | 9,160 |
| Plantation | 6,076 | 3,779 |
| Urban | 4,212 | 5,303 |
| Building | 1,640 | 398 |
| Cloud | 5,176 | |
| Total | 238,772 | 26,237 |
| Combustion Types | Criterion 1 SICIρ | AND | Criterion 2 ρband-1 | AND | Criterion 3 ρSWIR-2 | AND | Criterion 4 BTTIR-1 (K) |
|---|---|---|---|---|---|---|---|
| S | >1 | Clear sky (ρband-1 < 0.27) | ≥0.09 and ≤0.31 | ≥297 | |||
| FS | >1 | > 0.31 | >300 | ||||
| F | >1 | ≥0.68 | ≥307 | ||||
| F (for close to saturated pixel) | ≤1 | Clear sky (ρband-1 < 0.27) | ≥0.68 | ≥307 | |||
| S | >1 | Smoky (ρband-1 ≥ 0.27) | ≥0.11 and ≤0.32 | ≥297 | |||
| FS | >1 | ≥0.32 and ≤0.47 | >297 | ||||
| F | >1 | ≥0.47 | ≥303 | ||||
| F (for close to saturated pixel) | ≤1 | Smoky (ρband-1 ≥ 0.27) | ≥0.47 | ≥303 |
| ToPeCAl Results Mapping | ||||||
|---|---|---|---|---|---|---|
| Categories | S | FS | F | Non | Total | |
| Ground truth | S | a1 | a2 | a3 | a4 | GΣS |
| FS | b1 | b2 | b3 | b4 | GΣFS | |
| F | c1 | c2 | c3 | c4 | GΣF | |
| Non | d1 | d2 | d3 | d4 | GΣNon | |
| Total | TΣS | TΣFS | TΣF | TΣNon | Σ | |
| (A) | ||||
| VNP14IMG | ||||
| Categories | Yes-Fire | No-Fire | Total | |
| Ground truth | Yes-Fire | a1 | a2 | GΣYes-Fire |
| Yes-Fire | b1 | b2 | GΣNo-Fire | |
| Total | VΣYes-Fire | VΣNo-Fire | Σ | |
| (B) | ||||
| VNP14IMG | ||||
| Categories | Yes-Fire | No-Fire | Total | |
| ToPeCAl | Yes-Fire | a1 | a2 | TΣYes-Fire |
| No-Fire | b1 | b2 | TΣNo-Fire | |
| Total | VΣYes-Fire | VΣNo-Fire | Σ | Σ |
| (C) | ||||
| VNP14IMG | Total | |||
| Categories | Yes-Fire | No-Fire | ||
| ToPeCAl | S | a1 | a2 | TΣS |
| FS | b1 | b2 | TΣFS | |
| F | c1 | c2 | TΣF | |
| Non | d1 | d2 | TΣNon | |
| Total | VΣYes-Fire | VΣNo-Fire | Σ | |
| (A) | ||||||
| ToPeCAl Mapping Counts | Total | |||||
| Categories | S | FS | F | Non | ||
| Ground truth | S | 44 | 1 | 0 | 15 | 60 |
| FS | 0 | 26 | 1 | 0 | 27 | |
| F | 0 | 0 | 16 | 0 | 16 | |
| Non | 0 | 5 | 0 | 14 | 19 | |
| Total | 44 | 32 | 17 | 29 | 122 | |
| (B) | ||||||
| ToPeCAl Mapping | SCORES | |||||
| PC | FAR | POD | BIAS | |||
| S | 82% | 0% | 73% | 0.73 | ||
| FS | 16% | 96% | 1.19 | |||
| F | 0% | 100% | 1.06 | |||
| Non | 48% | 74% | 1.53 | |||
| (A) | ||||
| VNP14IMG | Total | |||
| Categories | Yes-Fire | No-Fire | ||
| Ground truth | Yes-Fire | 73 | 15 | 88 |
| No-Fire | 20 | 14 | 34 | |
| Total | 93 | 29 | 122 | |
| (B) | ||||
| VNP14IMG | SCORES | |||
| PC | FAR | POD | BIAS | |
| Yes-Fire | 71% | 22% | 83% | 1.05 |
| No-Fire | 48% | 41% | 0.85 | |
| (A) | ||||
| Buffer Zone (m) | PC | FAR | POD | BIAS |
| 187.5 | 99.9% | 94.3% | 6% | 1.1 |
| 375 | 99.8% | 95.9% | 19% | 4.7 |
| 500 | 99.8% | 96.2% | 21% | 5.3 |
| 750 | 97.7% | 97.7% | 29% | 12.8 |
| 1000 | 99.2% | 98.3% | 33% | 19.6 |
| 1250 | 98.9% | 98.7% | 37% | 27.5 |
| 1500 | 98.5% | 98.8% | 42% | 35.7 |
| (B) | ||||
| Buffer Zone (m) | PC | FAR | POD | BIAS |
| 187.5 | 99.9% | 91.7% | 23% | 2.8 |
| 375 | 99.7% | 92.8% | 57% | 8.0 |
| 500 | 99.6% | 94.4% | 62% | 11.0 |
| 750 | 99.4% | 96.3% | 66% | 17.8 |
| 1000 | 99.1% | 97.3% | 69% | 25.4 |
| 1250 | 98.8% | 97.9% | 70% | 33.9 |
| 1500 | 98.5% | 98.3% | 72% | 43.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sofan, P.; Bruce, D.; Jones, E.; Marsden, J. Detection and Validation of Tropical Peatland Flaming and Smouldering Using Landsat-8 SWIR and TIRS Bands. Remote Sens. 2019, 11, 465. https://doi.org/10.3390/rs11040465
Sofan P, Bruce D, Jones E, Marsden J. Detection and Validation of Tropical Peatland Flaming and Smouldering Using Landsat-8 SWIR and TIRS Bands. Remote Sensing. 2019; 11(4):465. https://doi.org/10.3390/rs11040465
Chicago/Turabian StyleSofan, Parwati, David Bruce, Eriita Jones, and Jackie Marsden. 2019. "Detection and Validation of Tropical Peatland Flaming and Smouldering Using Landsat-8 SWIR and TIRS Bands" Remote Sensing 11, no. 4: 465. https://doi.org/10.3390/rs11040465
APA StyleSofan, P., Bruce, D., Jones, E., & Marsden, J. (2019). Detection and Validation of Tropical Peatland Flaming and Smouldering Using Landsat-8 SWIR and TIRS Bands. Remote Sensing, 11(4), 465. https://doi.org/10.3390/rs11040465