Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image



Abstract
1. Introduction
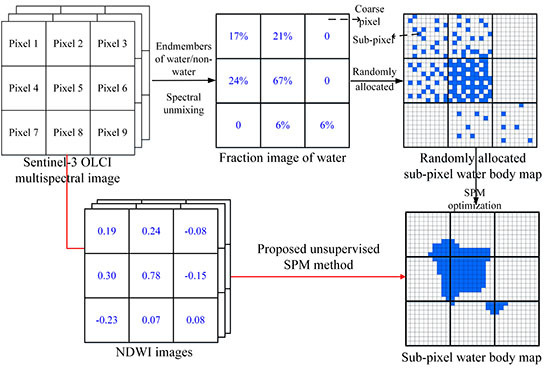
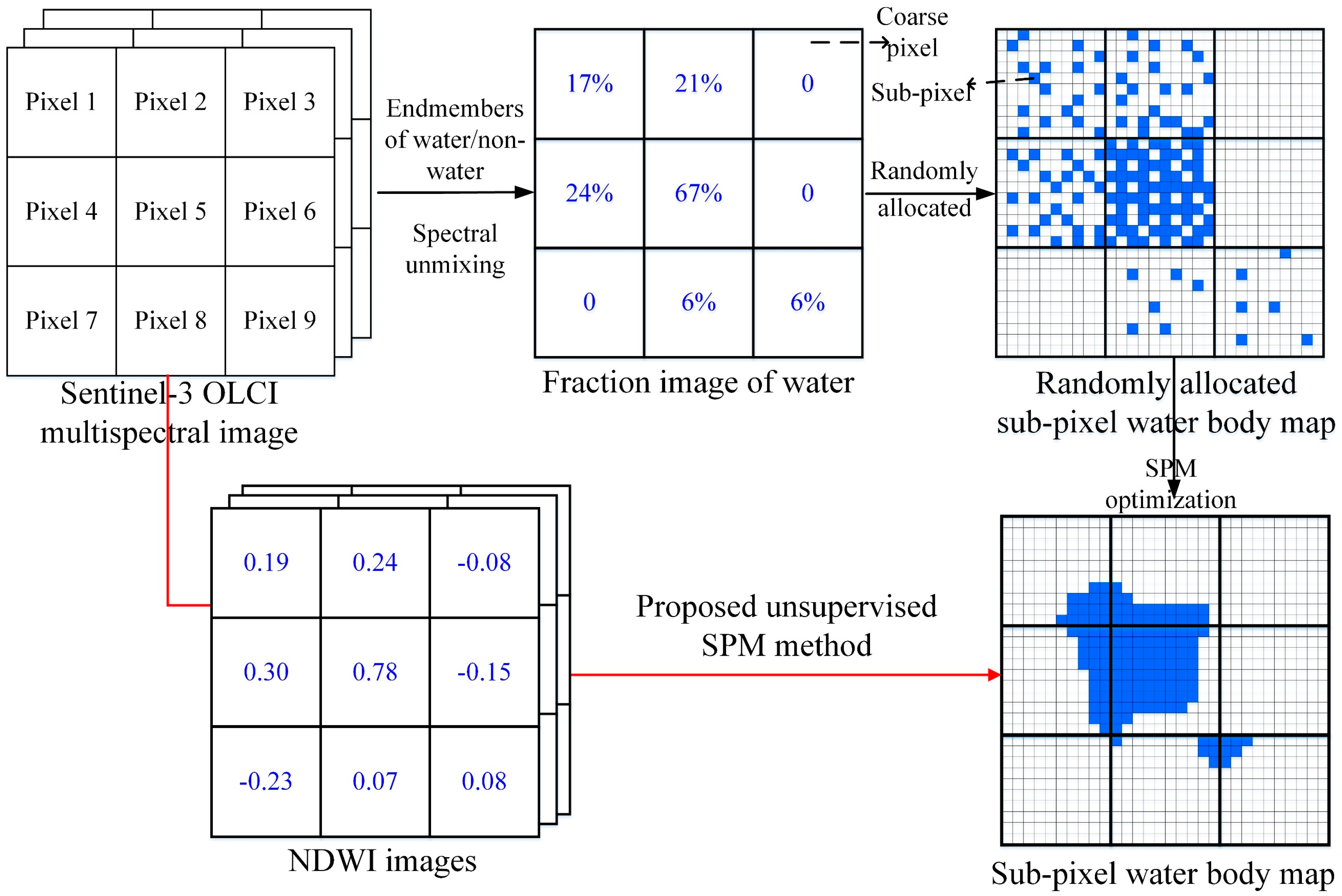
2. Sub-Pixel Water Body Mapping with SPM
3. Methods
3.1. The Objective Function of USWBM
3.2. The Spectral Water Index Term
3.3. The Sub-Pixel Water Spatial Dependence Term
3.4. The Coarse-Pixel Water Spatial Dependence Term
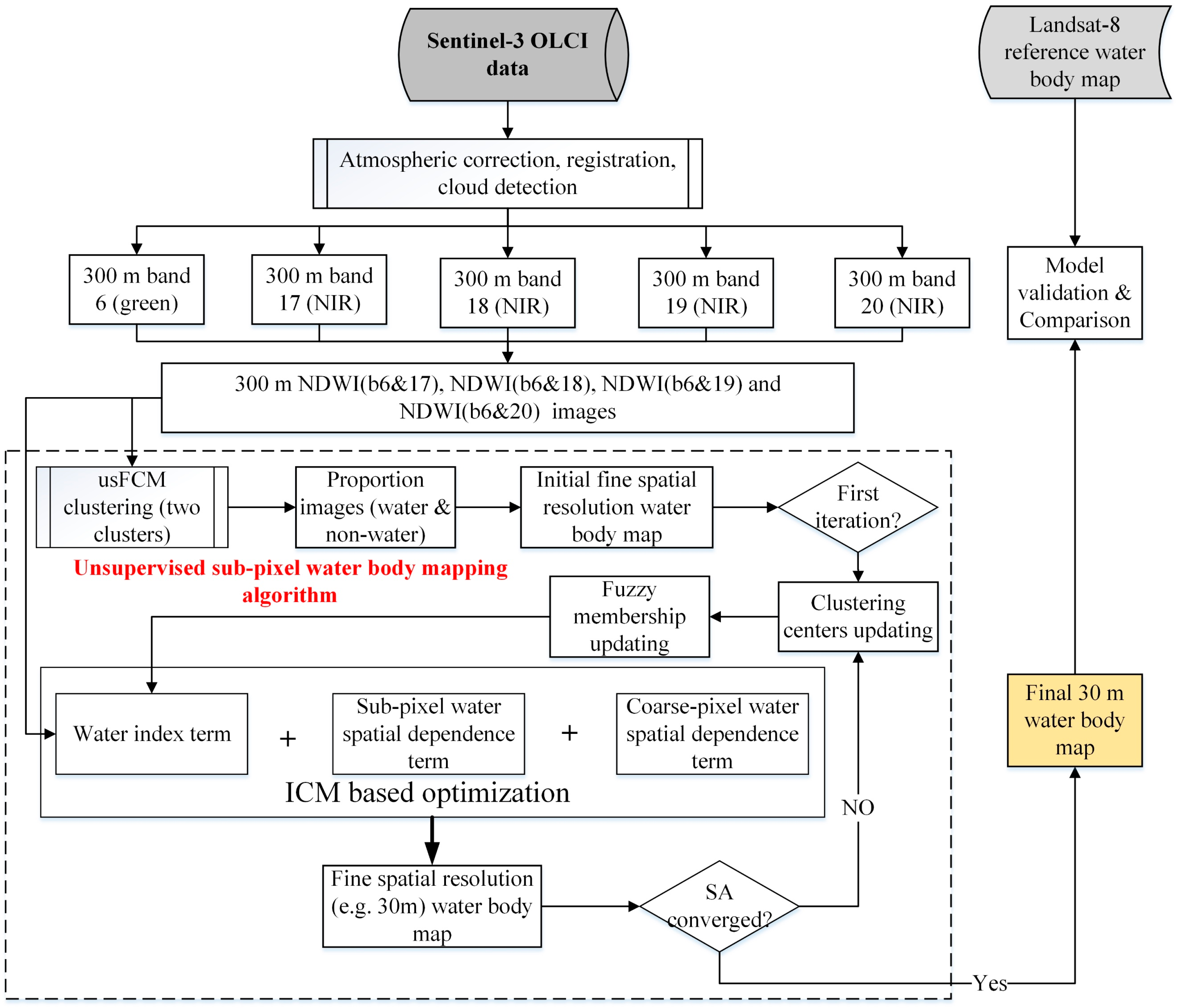
3.5. Implementation of USWBM
- (1)
- Pre-process the Sentinel-3 OLCI data, and extract the four NDWI images based on the band 6 and bands 17–20. Set the scale factor , the values of key parameters , and , the maximum iteration number , and the starting temperature .
- (2)
- Randomly label the sub-pixels within each coarse pixel as water or non-water classes, so as to generate an initialized sub-pixel water body map.
- (3)
- Obtain the fraction value and the clustering center vector for the initialized sub-pixel water body map via Equations (3) and (5), and then calculate the objective function value shown in Equation (1).
- (4)
- Decrease the temperature , the class labels of all the sub-pixels in the sub-pixel water body map are changed in terms of a row-wise visiting scheme, and update the fraction value and the clustering center vector .
- (5)
- End the iteration by reaching , or when no less than 0.1% of the sub-pixel labels are changed between two iterations; otherwise, steps 4 is repeated.
4. Experiment Results and Discussion
4.1. Experiment Setup
4.1.1. Datasets Pre-Processing
4.1.2. Accuracy Assessment
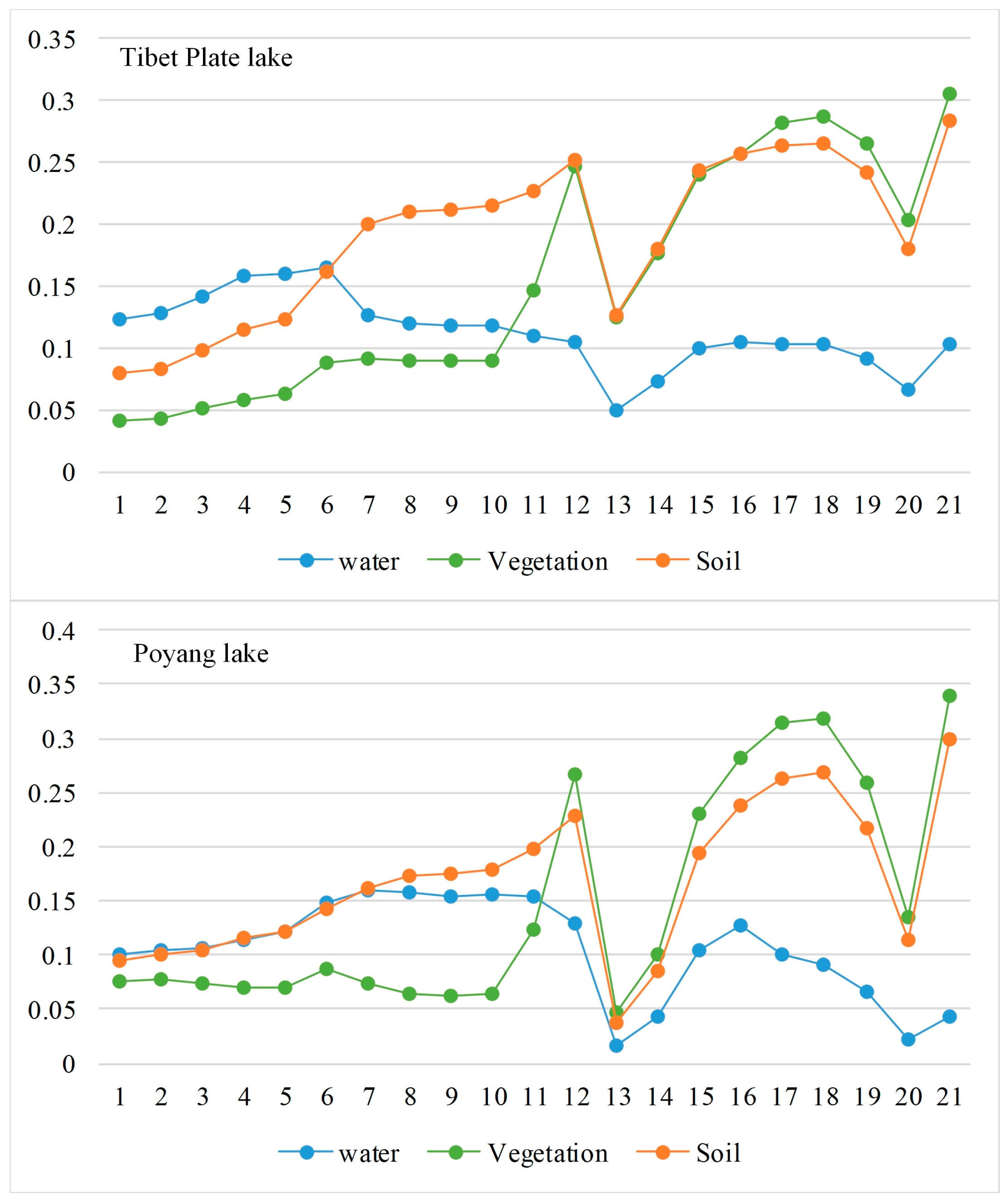
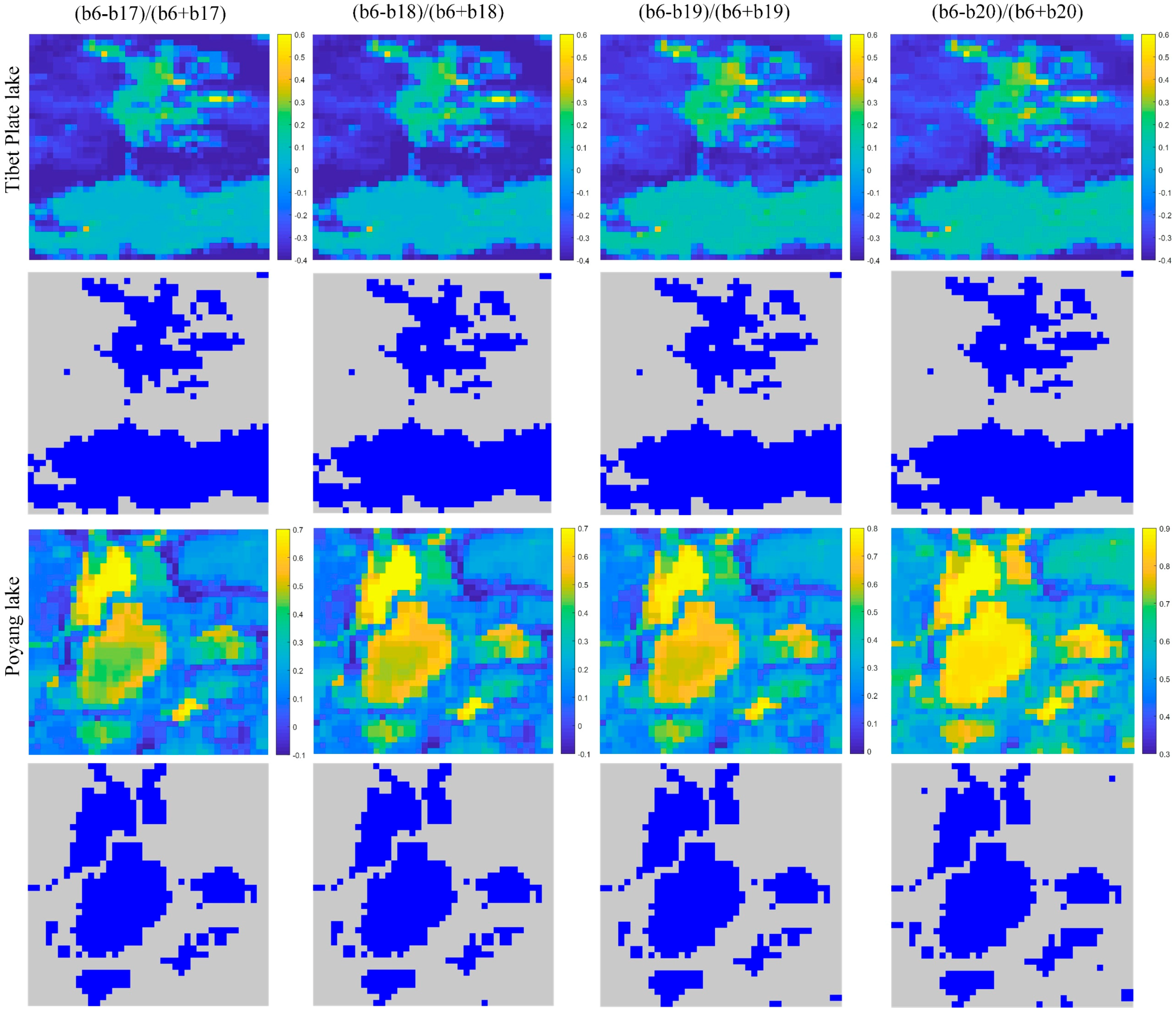
4.2. Spectral Response Analysis of Water Features
4.3. Pixel-Based Water Body Mapping from Different NDWI Images
4.4. Comparison of Water Body Mapping with Different Algorithms
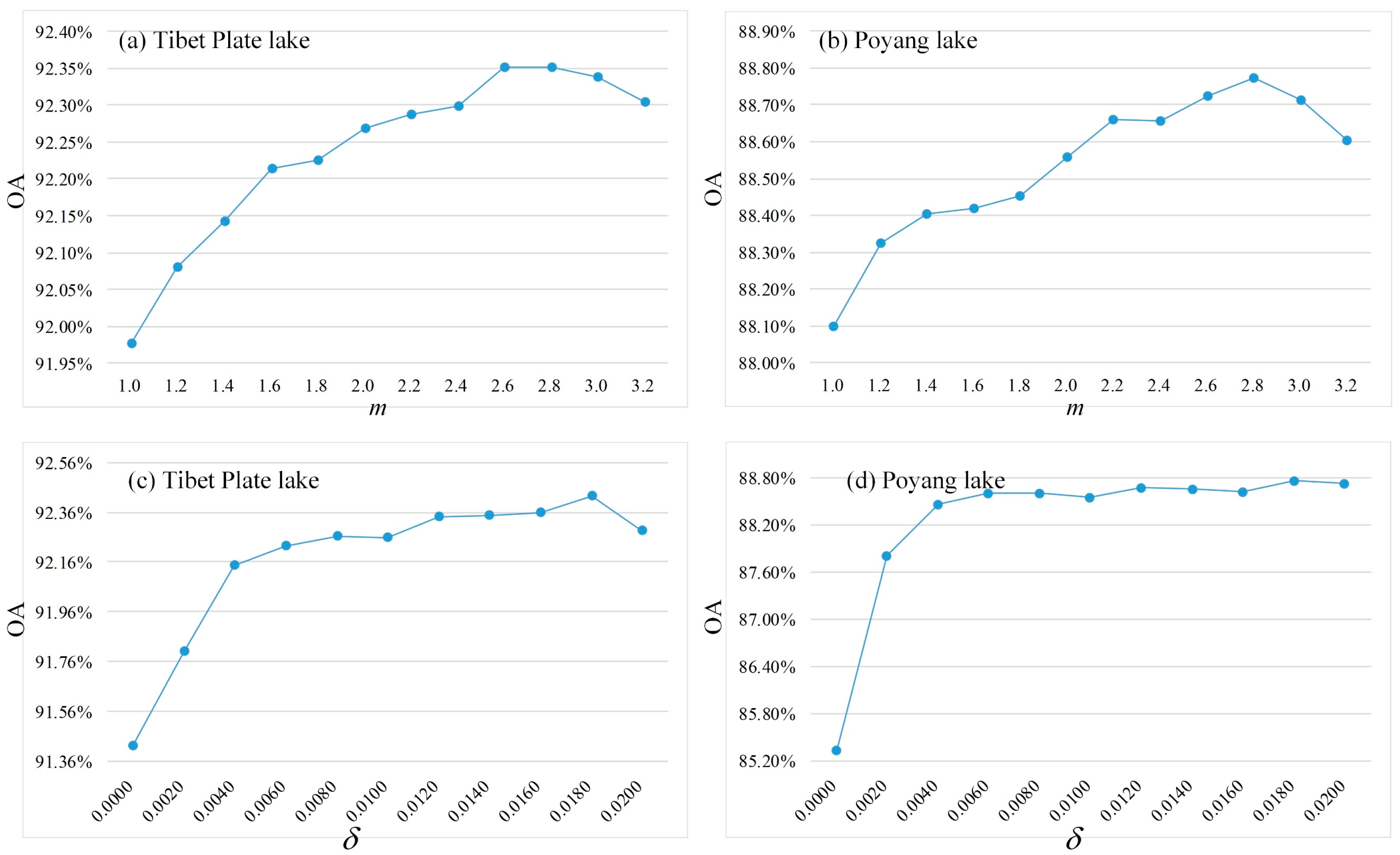
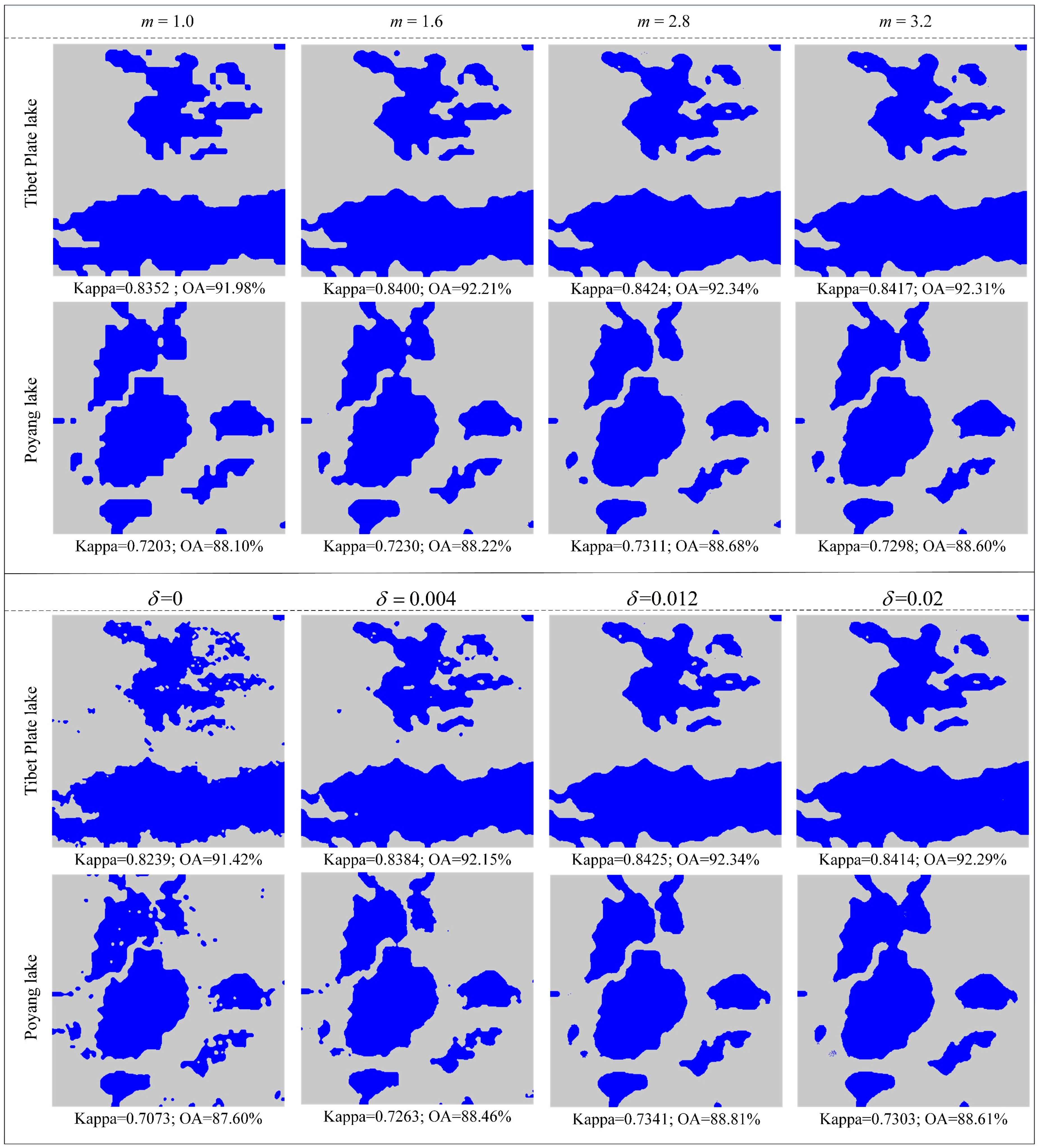
4.5. Effect of the Fuzziness Parameter and Coarse-Pixel Spatial Dependence
4.6. Advantages, Error Sources and Future Work
- (1)
- Compared with the traditional pixel-based water body mapping methods, USWBM can extract water body maps from Sentinel-3 OLCI image at the sub-pixel scale.
- (2)
- Compared with the traditional sub-pixel water body mapping methods, USWBM can directly extract water body map from NDWI images, and there is no need for USWBM to collect training samples and endmembers of water and non-water classes.
- (3)
- Compared with the traditional unsupervised sub-pixel mapping method of usFCM_SPM, USWBM takes into account the coarse-pixel spatial dependence of water features, so as to provide holistic information of water class. Moreover, USWBM would produce any sub-pixel water body maps that usFCM_SPM can generate, and usFCM_SPM is a special case of USWBM.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tolpekin, V.A.; Stein, A. Quantification of the effects of Land-Cover-Class spectral separability on the accuracy of markov-Random-Field-Based superresolution mapping. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 3283–3297. [Google Scholar] [CrossRef]
- Woerd, H.; Wernand, M. True colour classification of natural waters with medium-spectral resolution satellites: SeaWiFS, MODIS, MERIS and OLCI. Sensors 2015, 15, 25663–25680. [Google Scholar] [CrossRef] [PubMed]
- Toming, K.; Kutser, T.; Uiboupin, R.; Arikas, A.; Vahter, K.; Paavel, B. Mapping water quality parameters with Sentinel-3 ocean and land colour instrument imagery in the Baltic Sea. Remote Sens. 2017, 9, 1070. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M. Spatio-temporal fusion for daily sentinel-2 images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef]
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. ESA’s sentinel missions in support of Earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Verrelst, J.; Muñoz, J.; Alonso, L.; Delegido, J.; Rivera, J.P.; Camps-Valls, G.; Moreno, J. Machine learning regression algorithms for biophysical parameter retrieval: Opportunities for Sentinel-2 and -3. Remote Sens. Environ. 2012, 118, 127–139. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and -3. Int. J. Appl. Earth Obs. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Nguy-Robertson, A.L.; Gitelson, A.A. Algorithms for estimating green leaf area index in C3 and C4 crops for MODIS, Landsat TM/ETM+, MERIS, Sentinel MSI/OLCI, and Venµs sensors. Remote Sens. Lett. 2015, 6, 360–369. [Google Scholar] [CrossRef]
- Shen, M.; Duan, H.; Cao, Z.; Xue, K.; Loiselle, S.; Yesou, H. Determination of the downwelling diffuse attenuation coefficient of lake water with the Sentinel-3A OLCI. Remote Sens. 2017, 9, 1246. [Google Scholar] [CrossRef]
- Ruescas, A.; Hieronymi, M.; Mateo-Garcia, G.; Koponen, S.; Kallio, K.; Camps-Valls, G. Machine learning regression approaches for colored dissolved organic matter (CDOM) retrieval with S2-MSI and S3-OLCI simulated data. Remote Sens. 2018, 10, 786. [Google Scholar] [CrossRef]
- Schiller, H.; Doerffer, R. Improved determination of coastal water constituent concentrations from MERIS data. IEEE Trans. Geosci. Remote. Sens. 2005, 43, 1585–1591. [Google Scholar] [CrossRef]
- Carroll, M.L.; Townshend, J.R.; Dimiceli, C.M.; Noojipady, P.; Sohlberg, R.A. A new global raster water mask at 250 m resolution. Int. J. Digit. Earth 2009, 2, 291–308. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Cai, X.; Tian, L.; Gan, W. Assessment of inundation changes of Poyang Lake using MODIS observations between 2000 and 2010. Remote Sens. Environ. 2012, 121, 80–92. [Google Scholar] [CrossRef]
- Ge, X.; Sun, X.; Liu, Z. Object-oriented coastline classification and extraction from remote sensing imagery. Remote Sens. Environ. 2014, 140, 704–716. [Google Scholar]
- Li, S.; Sun, D.; Goldberg, M.; Stefanidis, A. Derivation of 30-m-resolution water maps from TERRA/MODIS and SRTM. Remote Sens. Environ. 2013, 134, 417–430. [Google Scholar] [CrossRef]
- Majozi, N.P.; Salama, M.S.; Bernard, S.; Harper, D.M.; Habte, M.G. Remote sensing of euphotic depth in shallow tropical inland waters of Lake Naivasha using MERIS data. Remote Sens. Environ. 2014, 148, 178–189. [Google Scholar] [CrossRef]
- Zurita-Milla, R.; Gomez-Chova, L.; Guanter, L.; Clevers, J.G.P.W.; Camps-Valls, G. Multitemporal unmixing of medium-spatial-resolution satellite images: A case study using MERIS images for land-cover mapping. IEEE Trans. Geosci. Remote. Sens. 2011, 49, 4308–4317. [Google Scholar] [CrossRef]
- Carrão, H.; Araujo, A.; Gonçalves, P.; Caetano, M. Multitemporal MERIS images for land-cover mapping at a national scale: A case study of Portugal. Int. J. Remote Sens. 2010, 31, 2063–2082. [Google Scholar] [CrossRef]
- Work, E.A., Jr.; Gilmer, D.S. Utilization of satellite data for inventorying prairie ponds and lakes. Photogramm. Eng. Remote Sens. 1976, 42, 685–694. [Google Scholar]
- Sun, D.; Yu, Y.; Goldberg, M.D. Deriving water fraction and flood maps from MODIS images using a decision tree approach. IEEE J. STARS 2011, 4, 814–825. [Google Scholar] [CrossRef]
- Crasto, N.; Hopkinson, C.; Forbes, D.L.; Lesack, L.; Marsh, P.; Spooner, I.; Van Der Sanden, J.J. A LiDAR-based decision-tree classification of open water surfaces in an Arctic delta. Remote Sens. Environ. 2015, 164, 90–102. [Google Scholar] [CrossRef]
- Franke, J.; Roberts, D.A.; Halligan, K.; Menz, G. Hierarchical Multiple Endmember Spectral Mixture Analysis (MESMA) of hyperspectral imagery for urban environments. Remote Sens. Environ. 2009, 113, 1712–1723. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from sentinel-2 imagery with modified normalized difference water index at 10-m spatial resolution produced by sharpening the SWIR band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Li, W.; Du, Z.; Ling, F.; Zhou, D.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. A comparison of land surface water mapping using the normalized difference water index from TM, ETM+ and ALI. Remote Sens. 2013, 5, 5530–5549. [Google Scholar] [CrossRef]
- Mcfeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Kasetkasem, T.; Arora, M.K.; Varshney, P.K. Super-resolution land cover mapping using a Markov random field based approach. Remote Sens. Environ. 2005, 96, 302–314. [Google Scholar] [CrossRef]
- Atkinson, P.M. Sub-pixel target mapping from soft-classified, remotely sensed imagery. Photogramm. Eng. Remote Sens. 2005, 71, 839–846. [Google Scholar] [CrossRef]
- Foody, G.M. Sharpening fuzzy classification output to refine the representation of sub-pixel land cover distribution. Int. J. Remote Sens. 1998, 19, 2593–2599. [Google Scholar] [CrossRef]
- Ling, F.; Xiao, F.; Du, Y.; Xue, H.P.; Ren, X.Y. Waterline mapping at the subpixel scale from remote sensing imagery with high-resolution digital elevation models. Int. J. Remote Sens. 2008, 29, 1809–1815. [Google Scholar] [CrossRef]
- Muad, A.M.; Foody, G.M. Super-resolution mapping of lakes from imagery with a coarse spatial and fine temporal resolution. Int. J. Appl. Earth Obs. 2012, 15, 79–91. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Wu, J. DEM-based modification of pixel-swapping algorithm for enhancing floodplain inundation mapping. Int. J. Remote Sens. 2014, 35, 365–381. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Yu, X.; Liu, R.; Huang, C. Sub-pixel flood inundation mapping from multispectral remotely sensed images based on discrete particle swarm optimization. ISPRS J. Photogramm. Remote Sens. 2015, 101, 10–21. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Xu, T.; Liu, R.; Shi, K.; Huang, C. Super-resolution mapping of wetland inundation from remote sensing imagery based on integration of back-propagation neural network and genetic algorithm. Remote Sens. Environ. 2015, 164, 142–154. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Ling, F.; Zheng, D. Locally adaptive super-resolution waterline mapping with MODIS imagery. Remote Sens. Lett. 2016, 7, 1121–1130. [Google Scholar] [CrossRef]
- Huang, W.; Devries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M. Automated extraction of surface water extent from Sentinel-1 data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Goldberg, M.D.; Sjoberg, B.; Santek, D.A.; Hoffman, J.P.; Deweese, M.; Restrepo, P.; Lindsey, S.; Holloway, E. Automatic near real-time flood detection using Suomi-NPP/VIIRS data. Remote Sens. Environ. 2018, 204, 672–689. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, Y.; Li, X.; Fang, S.; Ling, F. Unsupervised subpixel mapping of remotely sensed imagery based on fuzzy C-means clustering approach. IEEE Geosci. Remote Sens. 2014, 11, 1024–1028. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, Y.; Ling, F.; Wang, X.; Li, X. Spectral–spatial based sub-pixel mapping of remotely sensed imagery with multi-scale spatial dependence. Int. J. Remote Sens. 2015, 36, 2831–2850. [Google Scholar] [CrossRef]
- Wang, Q.; Shi, W.; Atkinson, P.M. Sub-pixel mapping of remote sensing images based on radial basis function interpolation. ISPRS J. Photogramm. Remote Sens. 2014, 92, 1–15. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Y.; Ling, F.; Xu, S. Fine spatial resolution coastline extracting from Landsat-8 OLI imagery by integrating downscaling and pansharpening approaches. Remote Sens. Lett. 2018, 9, 314–323. [Google Scholar] [CrossRef]
- Keshava, N.; Mustard, J.F. Spectral Unmixing. IEEE Signal Proc. Mag. 2002, 19, 44–57. [Google Scholar] [CrossRef]
- Atkinson, P.M. Mapping sub-pixel vector boundaries from remotely sensed images. Innov. GIS 1997, 4, 166–180. [Google Scholar]
- Tatem, A.J.; Lewis, H.G.; Atkinson, P.M.; Nixon, M.S. Super-resolution land cover pattern prediction using a Hopfield neural network. Remote Sens. Environ. 2002, 79, 1–14. [Google Scholar] [CrossRef]
- Foody, G.M.; Cox, D.P. Sub-pixel land cover composition estimation using a linear mixture model and fuzzy membership functions. Int. J. Remote Sens. 1994, 15, 619–631. [Google Scholar] [CrossRef]
- Lin, K.C. On improvement of the computation speed of Otsu’s image thresholding. J. Electron. Imaging 2005, 14, 023011. [Google Scholar] [CrossRef]
- Lim, Y.W.; Lee, S.U. On the color image segmentation algorithm based on the thresholding and the fuzzy C-means techniques. Pattern Recogn. 1990, 23, 935–952. [Google Scholar]
- Atkinson, P.M. Downscaling in remote sensing. Int. J. Appl. Earth Obs. 2013, 22, 106–114. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, Y.; Ling, F.; Fang, S.; Li, X. Example-Based Super-Resolution Land Cover Mapping Using Support Vector Regression. IEEE J. STARS 2014, 7, 1271–1283. [Google Scholar] [CrossRef]
- Ling, F.; Li, W.; Du, Y.; Li, X. Land cover change mapping at the subpixel scale with different spatial-resolution remotely sensed imagery. IEEE Geosci. Remote Sens. 2011, 8, 182–186. [Google Scholar] [CrossRef]
- Li, X.; Ling, F.; Foody, G.M.; Ge, Y.; Zhang, Y.; Du, Y. Generating a series of fine spatial and temporal resolution land cover maps by fusing coarse spatial resolution remotely sensed images and fine spatial resolution land cover maps. Remote Sens. Environ. 2017, 196, 293–311. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Wavelength Range (nm) | Function |
|---|---|---|
| Oa1 | 392.5–407.5 | Aerosol correction, improved water constituent retrieval |
| Oa2 | 407.5–417.5 | Yellow substance and detrital pigments (turbidity) |
| Oa3 | 437.5–447.5 | Chlorophyll (Chl )absorption max., biogeochemistry, vegetation |
| Oa4 | 485–495 | High Chl, other pigments |
| Oa5 | 505–515 | Chl, sediment, turbidity, red tide |
| Oa6 | 555–565 | Chl reference (Chl minimum) |
| Oa7 | 615–625 | Sediment loading |
| Oa8 | 660–670 | Chl (2nd Chl abs. max.), sediment, yellow substance/vegetation |
| Oa9 | 670–677.5 | For improved fluorescence retrieval and to better account for smile together with the bands 665 and 680 nm |
| Oa10 | 677.5–682 | Chl fluorescence peak, red edge |
| Oa11 | 703.75–713.75 | Chl fluorescence baseline, red edge transition |
| Oa12 | 750–757.5 | O2 absorption/clouds, vegetation |
| Oa13 | 760–762.5 | O2 absorption band/aerosol correction |
| Oa14 | 762.5–766.25 | Atmospheric correction |
| Oa15 | 766.25–768.75 | O2A used for cloud top pressure, fluorescence over land |
| Oa16 | 771.25–786.25 | Atmos. corr./aerosol correction |
| Oa17 | 855–876 | Atmos. corr./aerosol corr., clouds, pixel co-registration |
| Oa18 | 880–890 | Water vapour absorption reference band. Common reference band with SLSTR instrument. Vegetation monitoring |
| Oa19 | 895–905 | Water vapour absorption/vegetation monitoring (max. reflectance) |
| Oa20 | 930–950 | Water vapour absorption, atmos./aerosol corr. |
| Oa21 | 1000–1040 | Atmos./aerosol correction |
| Water Index (NDWI) | Kappa | OA | Omission Error (Water) | Commission Error (Water) | |
|---|---|---|---|---|---|
| Tibet plate lake | (b6-b17)/(b6+b17) | 0.8166 | 91.07% | 0.1166 | 0.0968 |
| (b6-b18)/(b6+b18) | 0.8166 | 91.08% | 0.1166 | 0.0968 | |
| (b6-b19)/(b6+b19) | 0.8166 | 91.08% | 0.1166 | 0.0968 | |
| (b6-b20)/(b6+b20) | 0.8146 | 90.96% | 0.1113 | 0.1035 | |
| Poyang lake | (b6-b17)/(b6+b17) | 0.7106 | 87.73% | 0.2077 | 0.1945 |
| (b6-b18)/(b6+b18) | 0.7066 | 87.58% | 0.2131 | 0.1950 | |
| (b6-b19)/(b6+b19) | 0.7038 | 87.43% | 0.2106 | 0.2007 | |
| (b6-b20)/(b6+b20) | 0.6983 | 87.04% | 0.1955 | 0.2192 |
| Coherence | Kappa | OA | Omission Error (Water) | Commission Error (Water) | ||
|---|---|---|---|---|---|---|
| Tibet plate lake | OSTU+NDWI | 0.8167 | 0.8166 | 91.07% | 0.1166 | 0.0968 |
| usFCM+NDWI | 0.8174 | 0.8173 | 91.07% | 0.1003 | 0.1098 | |
| usFCM+4NDWI | 0.8178 | 0.8178 | 91.09% | 0.0973 | 0.1119 | |
| usFCM_SPM+NDWI | 0.8276 | 0.8273 | 91.61% | 0.1153 | 0.0862 | |
| usFCM_SPM+4NDWI | 0.8329 | 0.8327 | 91.87% | 0.1102 | 0.0847 | |
| USWBM+4NDWI (δ = 0.004) | 0.8387 | 0.8384 | 92.15% | 0.1067 | 0.0810 | |
| USWBM+4NDWI (δ = 0.012) | 0.8432 | 0.8430 | 92.37% | 0.1033 | 0.0795 | |
| Poyang lake | OSTU+NDWI | 0.7106 | 0.7106 | 87.73% | 0.2077 | 0.1945 |
| usFCM+NDWI | 0.7106 | 0.7098 | 87.87% | 0.2309 | 0.1755 | |
| usFCM+4NDWI | 0.7144 | 0.7114 | 88.12% | 0.2541 | 0.1504 | |
| usFCM_SPM+NDWI | 0.7184 | 0.7181 | 88.12% | 0.2129 | 0.1804 | |
| usFCM_SPM+4NDWI | 0.7209 | 0.7207 | 88.20% | 0.2064 | 0.1826 | |
| USWBM+4NDWI (δ = 0.004) | 0.7265 | 0.7263 | 88.46% | 0.20599 | 0.1757 | |
| USWBM+4NDWI (δ = 0.012) | 0.7345 | 0.7341 | 88.81% | 0.2039 | 0.1672 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Ling, F.; Yao, H.; Liu, Y.; Xu, S. Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image. Remote Sens. 2019, 11, 327. https://doi.org/10.3390/rs11030327
Wang X, Ling F, Yao H, Liu Y, Xu S. Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image. Remote Sensing. 2019; 11(3):327. https://doi.org/10.3390/rs11030327
Chicago/Turabian StyleWang, Xia, Feng Ling, Huaiying Yao, Yaolin Liu, and Shuna Xu. 2019. "Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image" Remote Sensing 11, no. 3: 327. https://doi.org/10.3390/rs11030327
APA StyleWang, X., Ling, F., Yao, H., Liu, Y., & Xu, S. (2019). Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image. Remote Sensing, 11(3), 327. https://doi.org/10.3390/rs11030327