Ku Band Terrestrial Radar Observations by Means of Circular Polarized Antennas



Abstract
1. Introduction
2. Materials and Methods
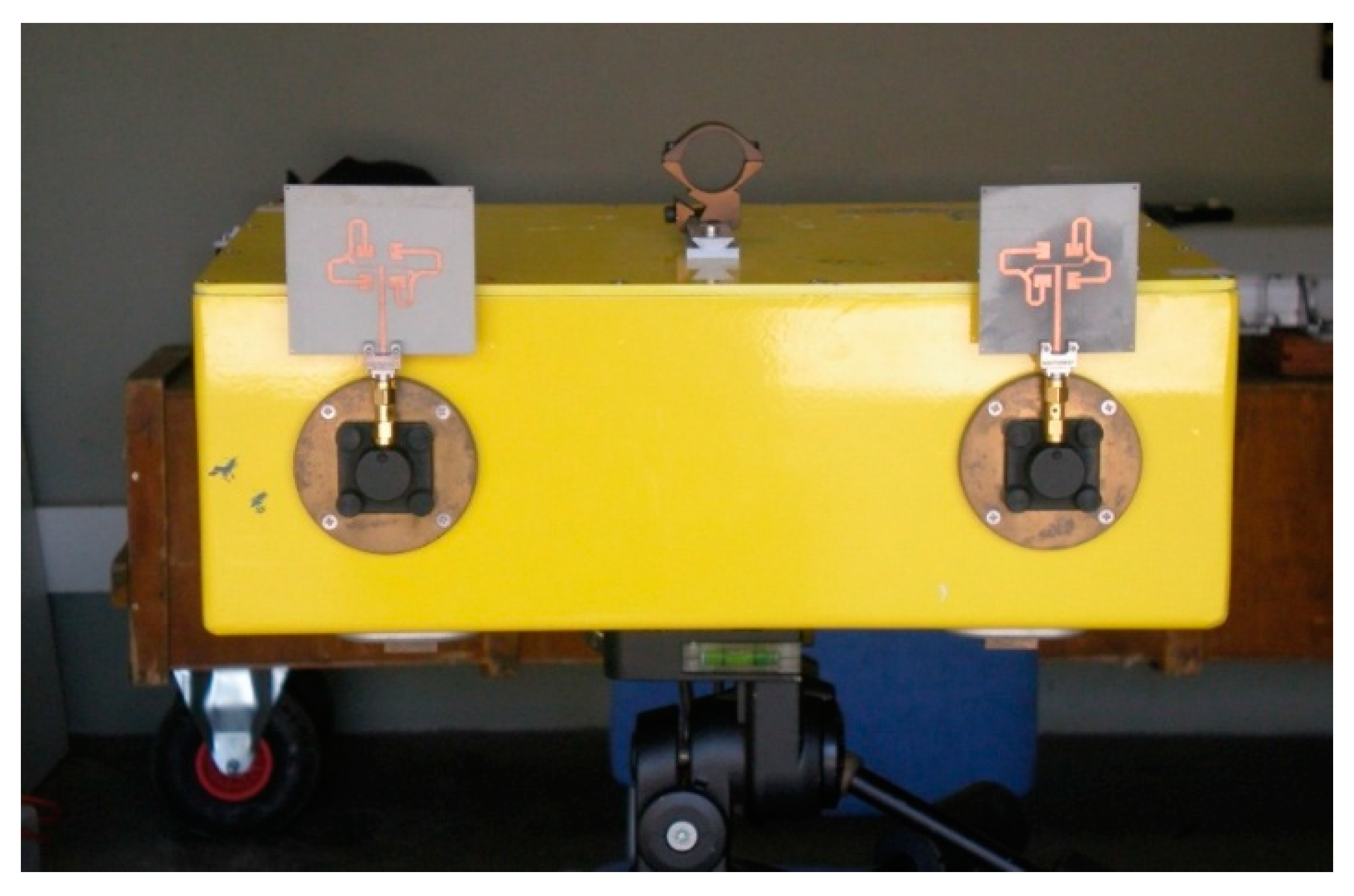
2.1. The Radar Setup
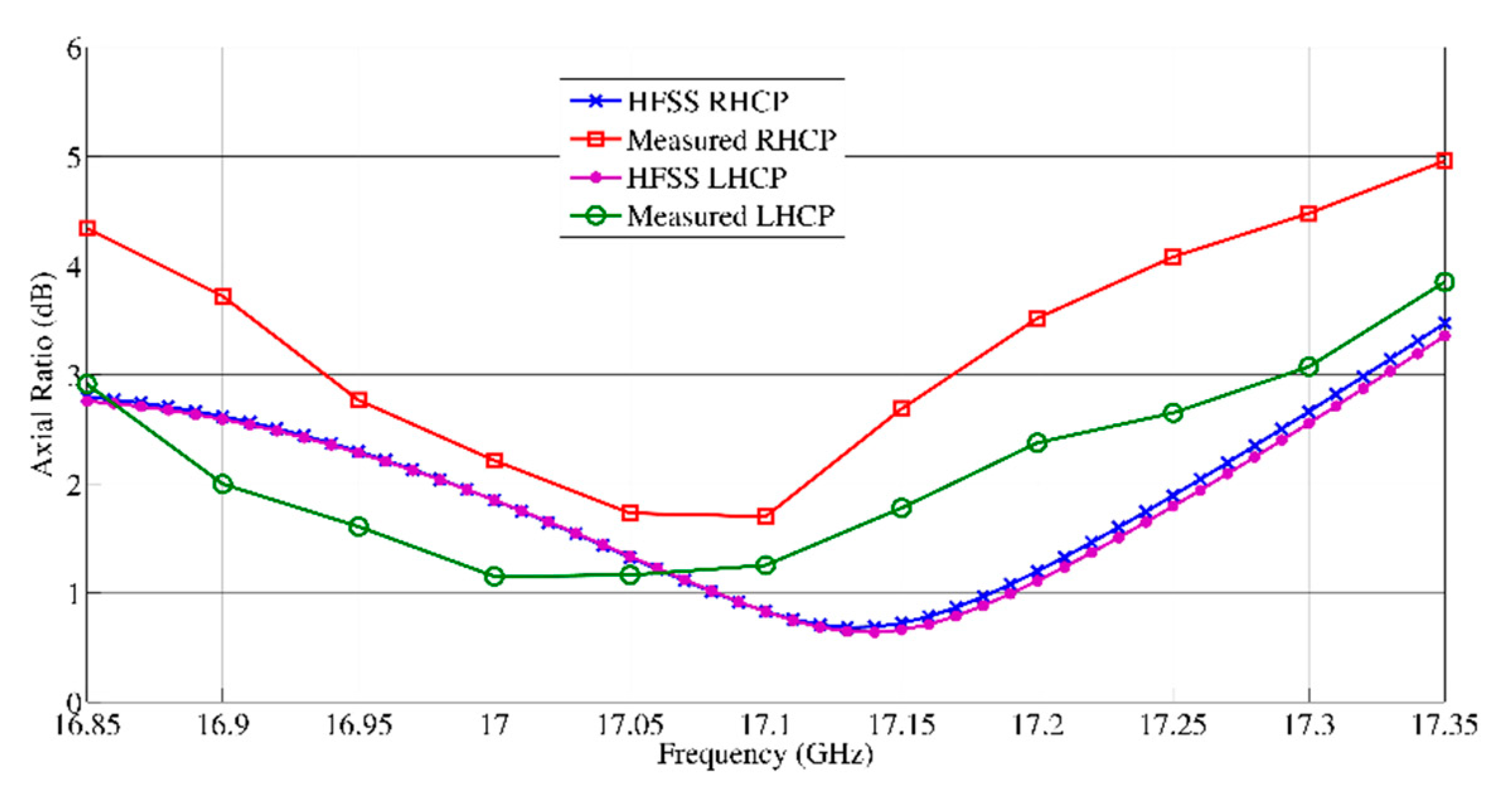
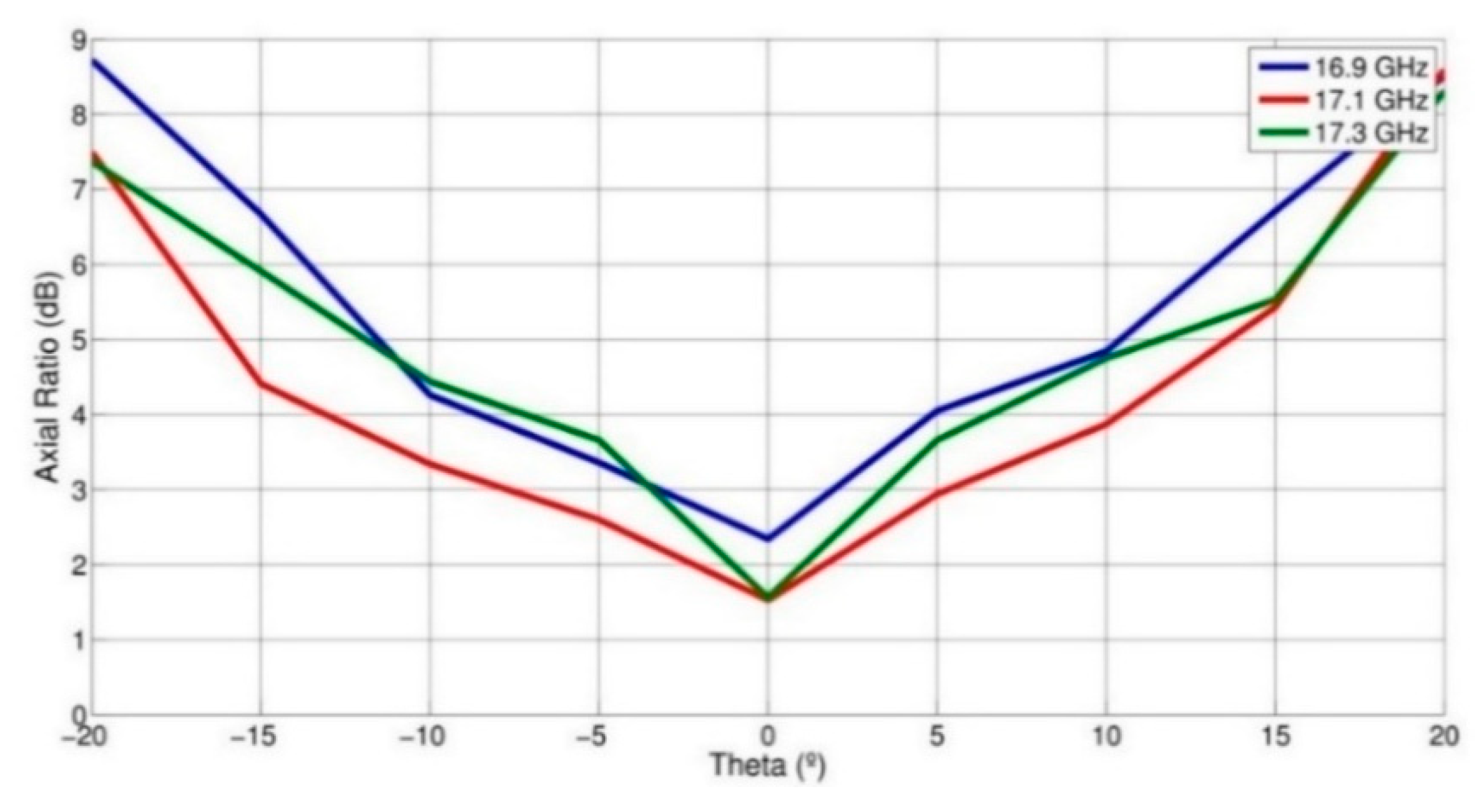
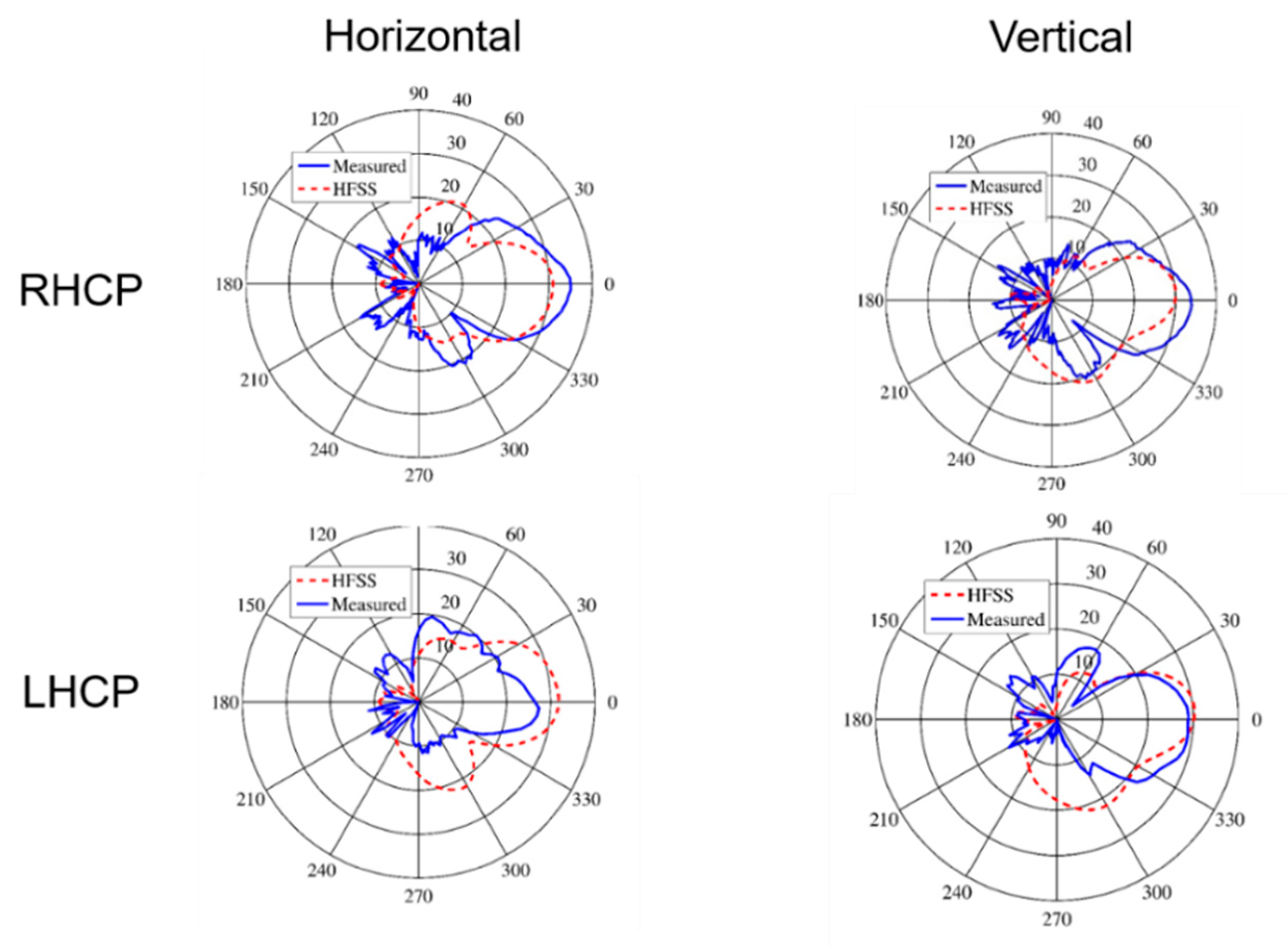
2.2. The Circular Polarization Antennas
2.3. Circularly Polarized Antennas’ Gain Estimate
- : Received power at measurement .
- : Transmitted power (at the port of the transmitting antenna).
- : Gain of the linear polarized horn.
- : Gain of the circularly polarized patch array.
- : radar cross section of the target.
- : propagation and loss factor.
3. Experimental Results
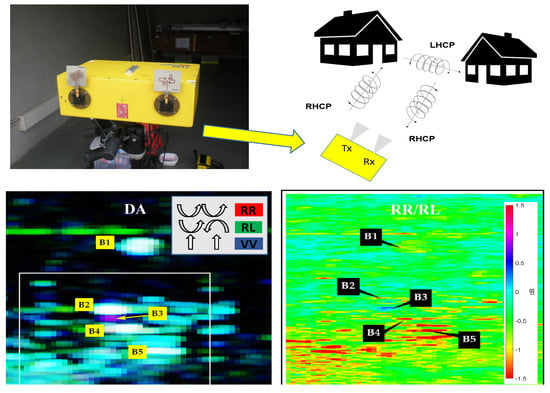
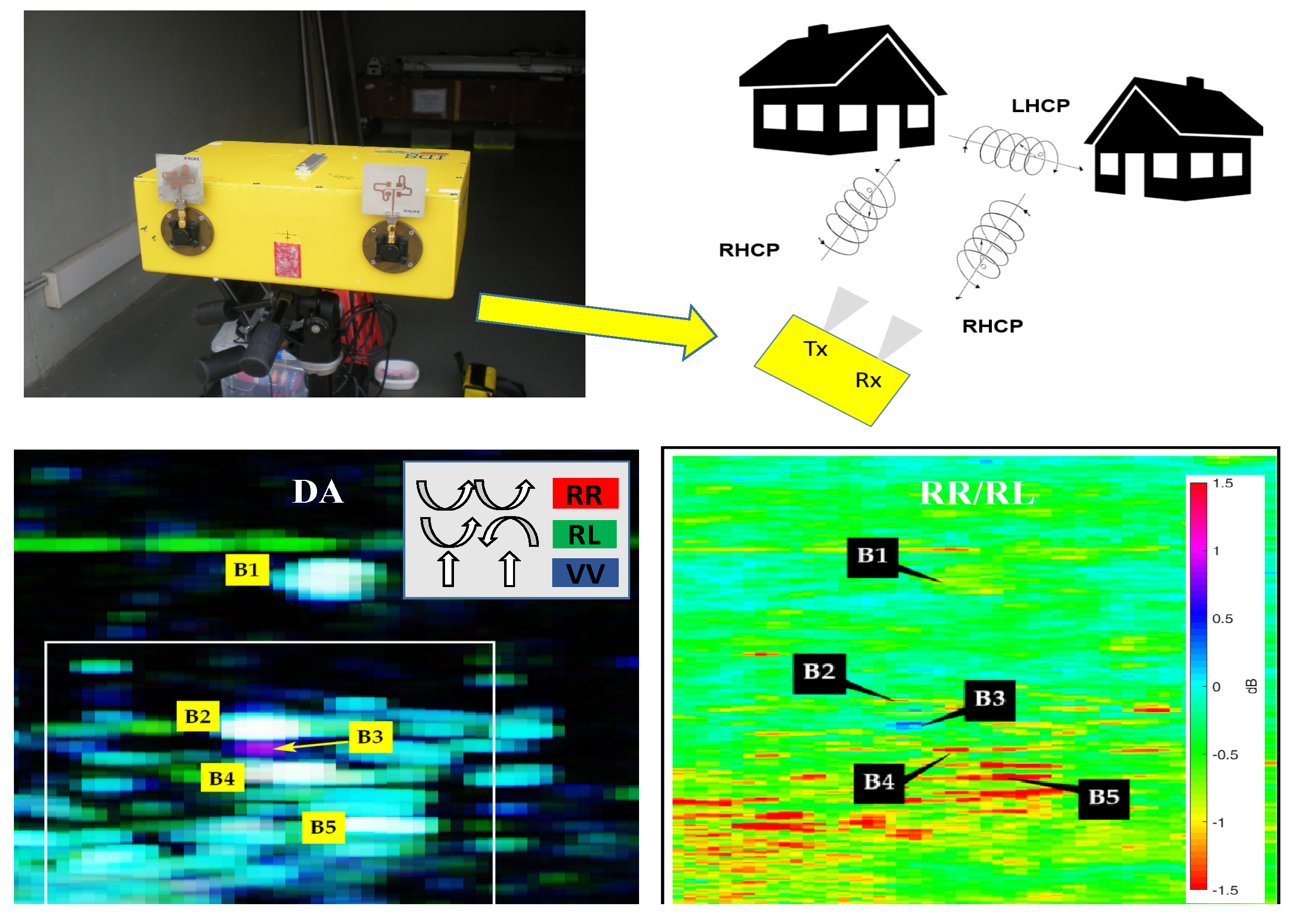
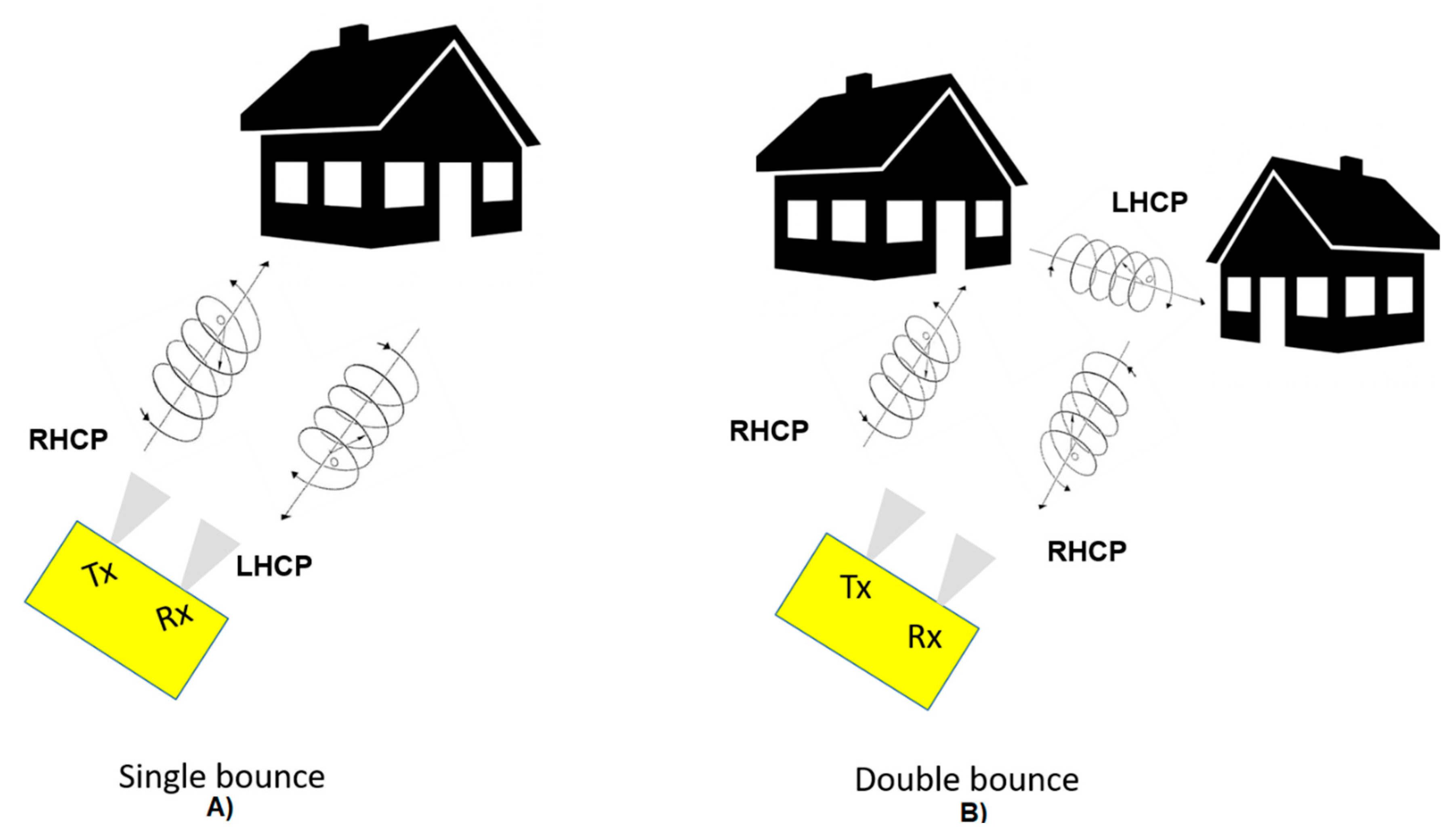
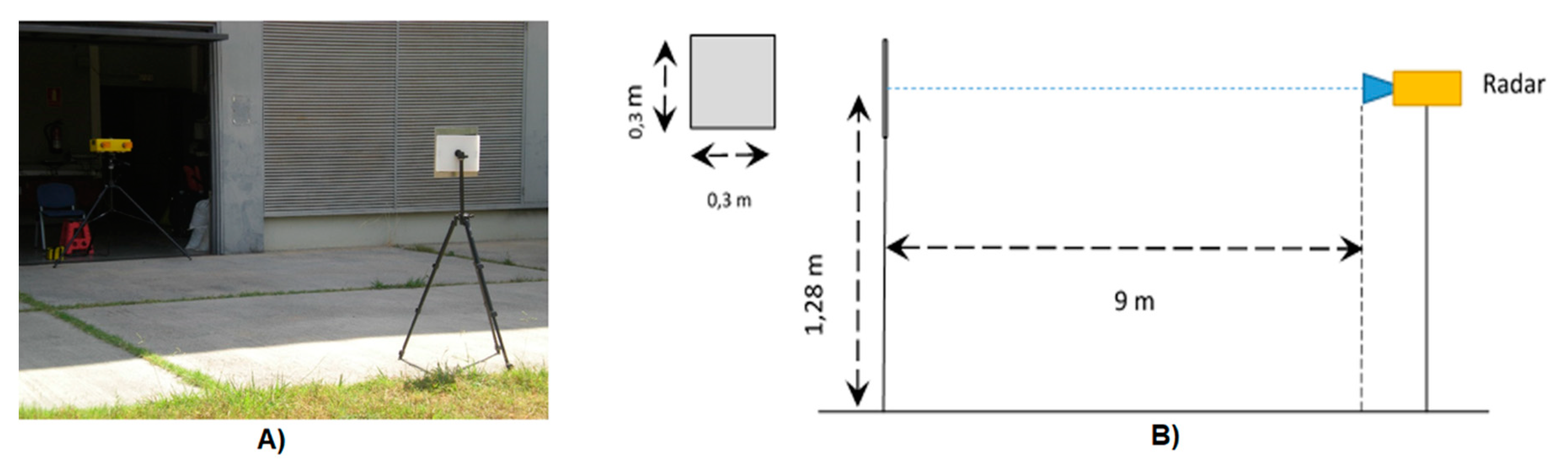
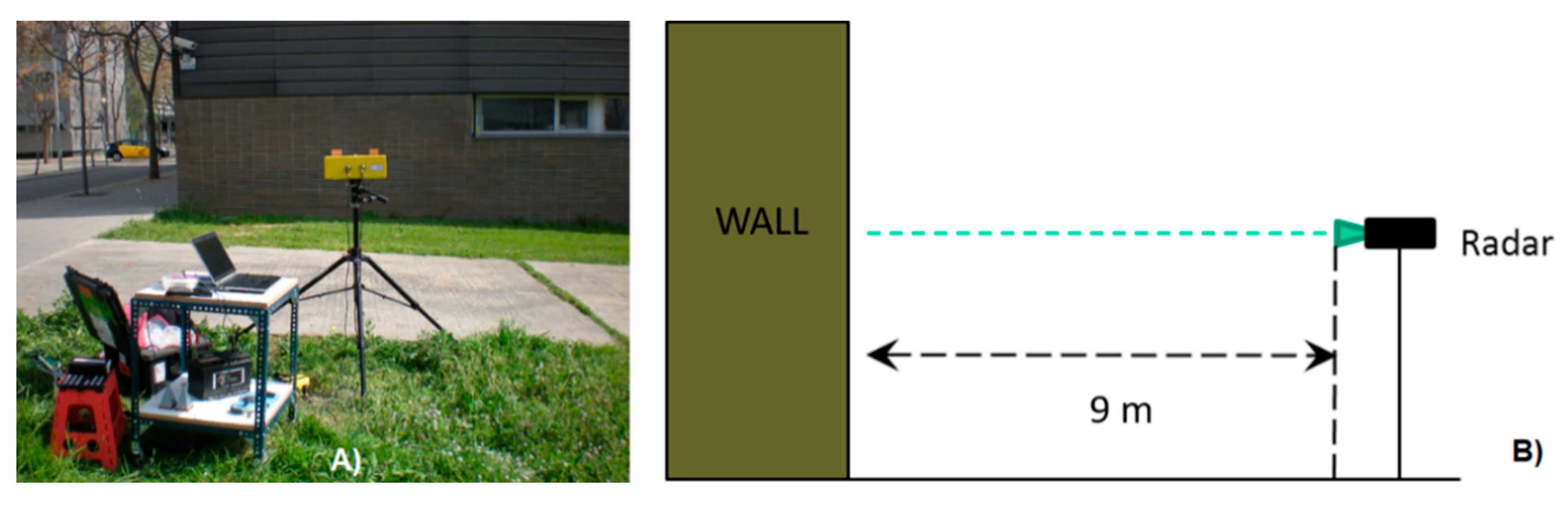
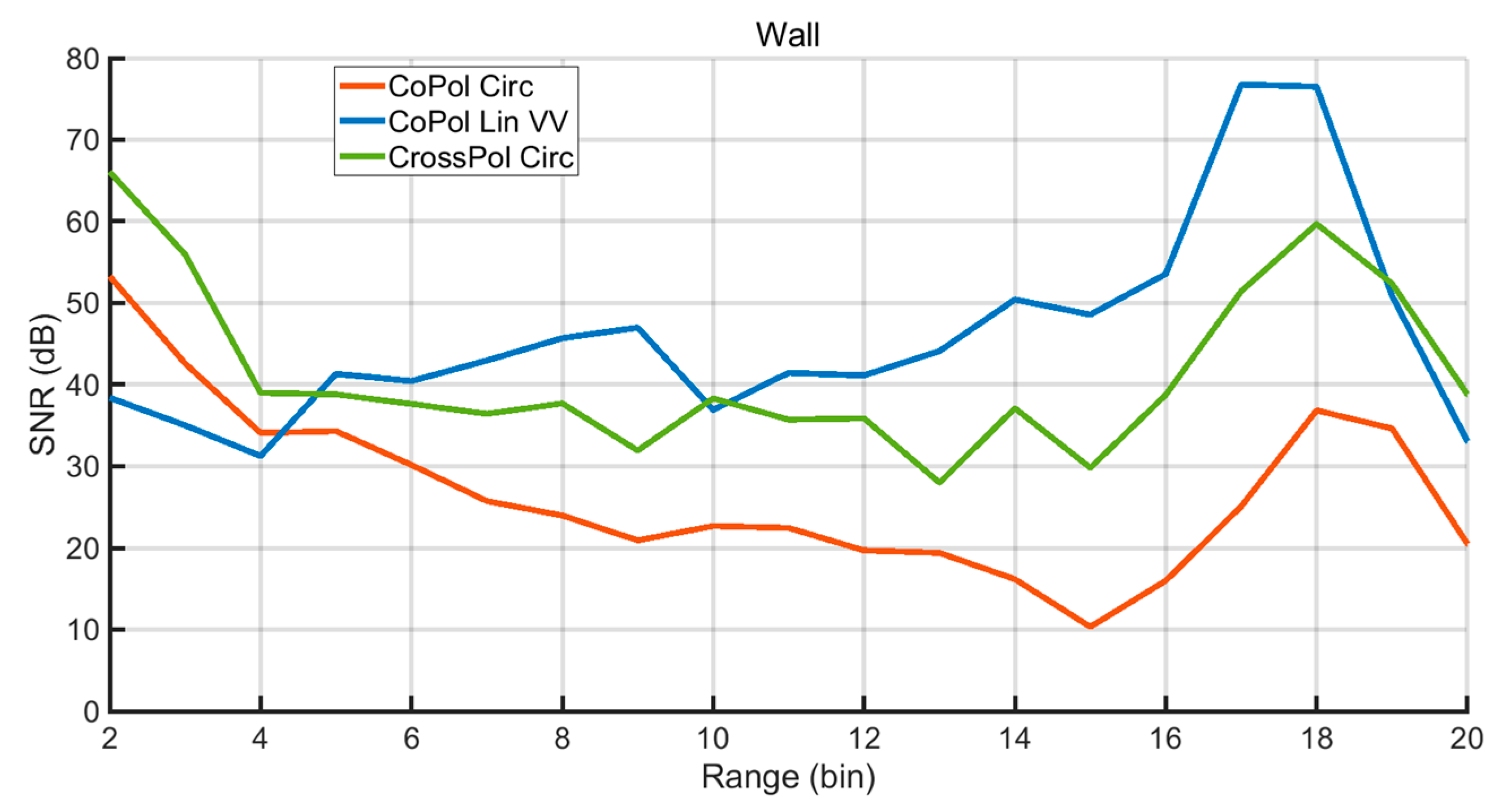
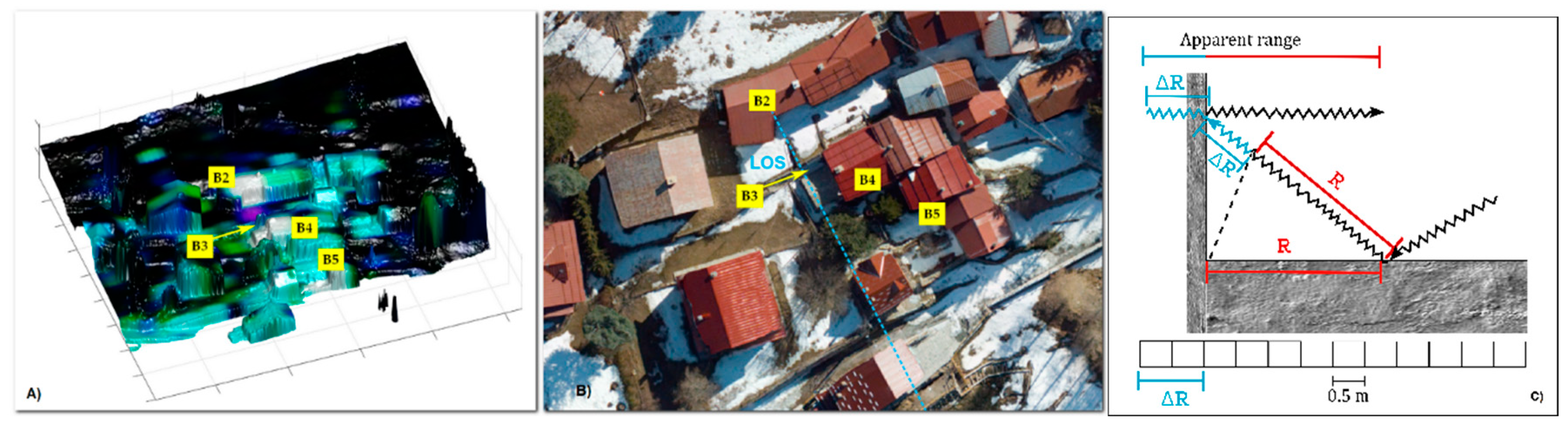
3.1. RAR Acquisitions: The Response of a Wall
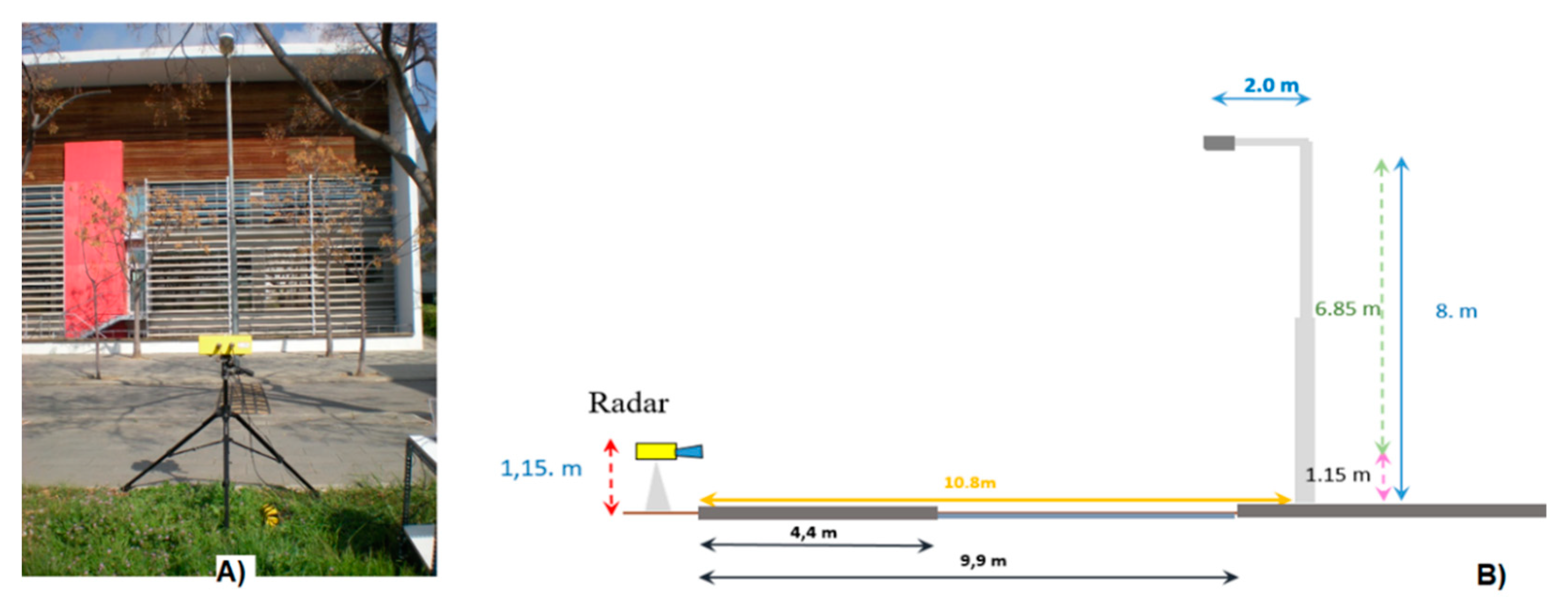
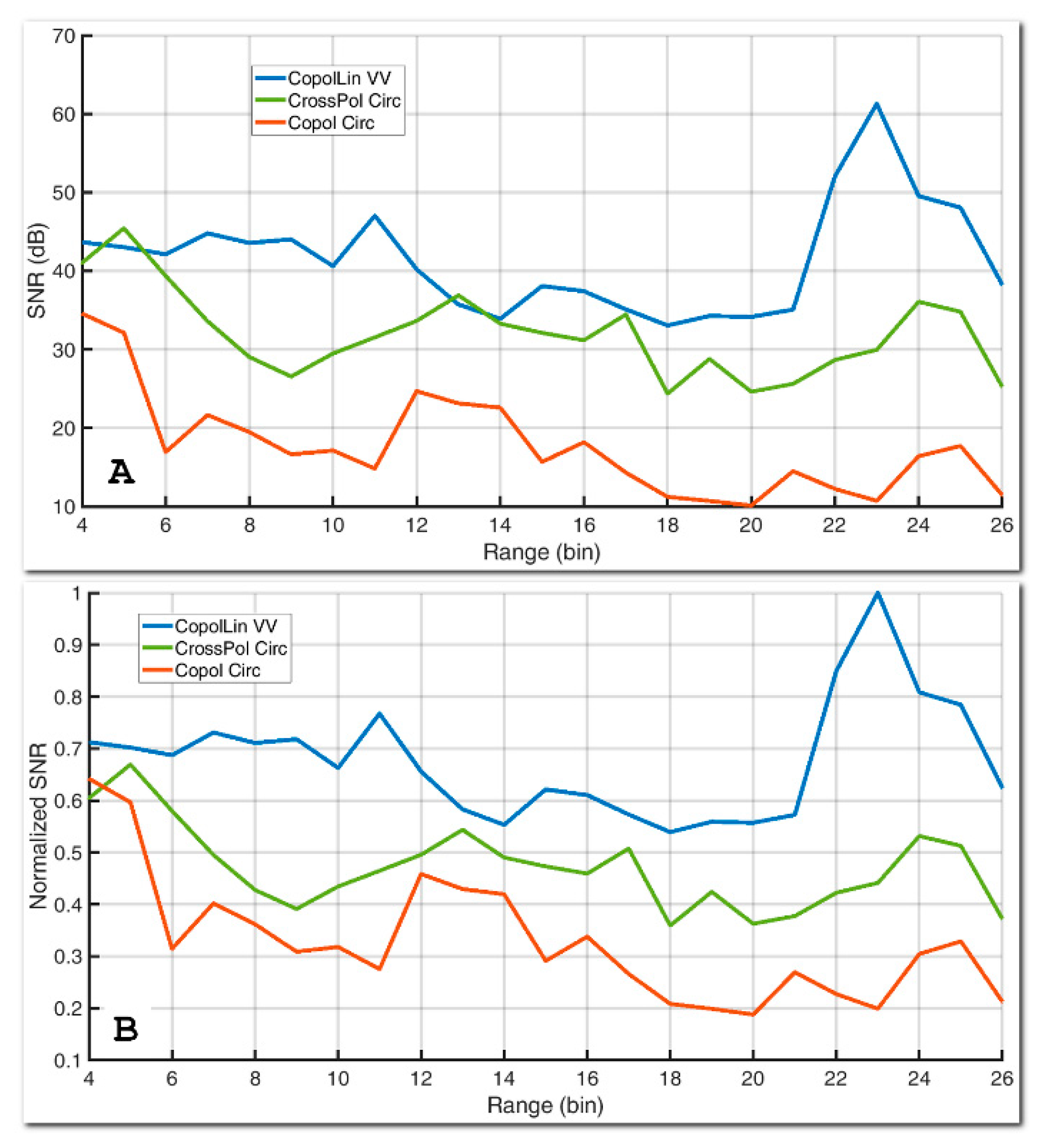
3.2. RAR Acquisitions: The Response of a Lightpole
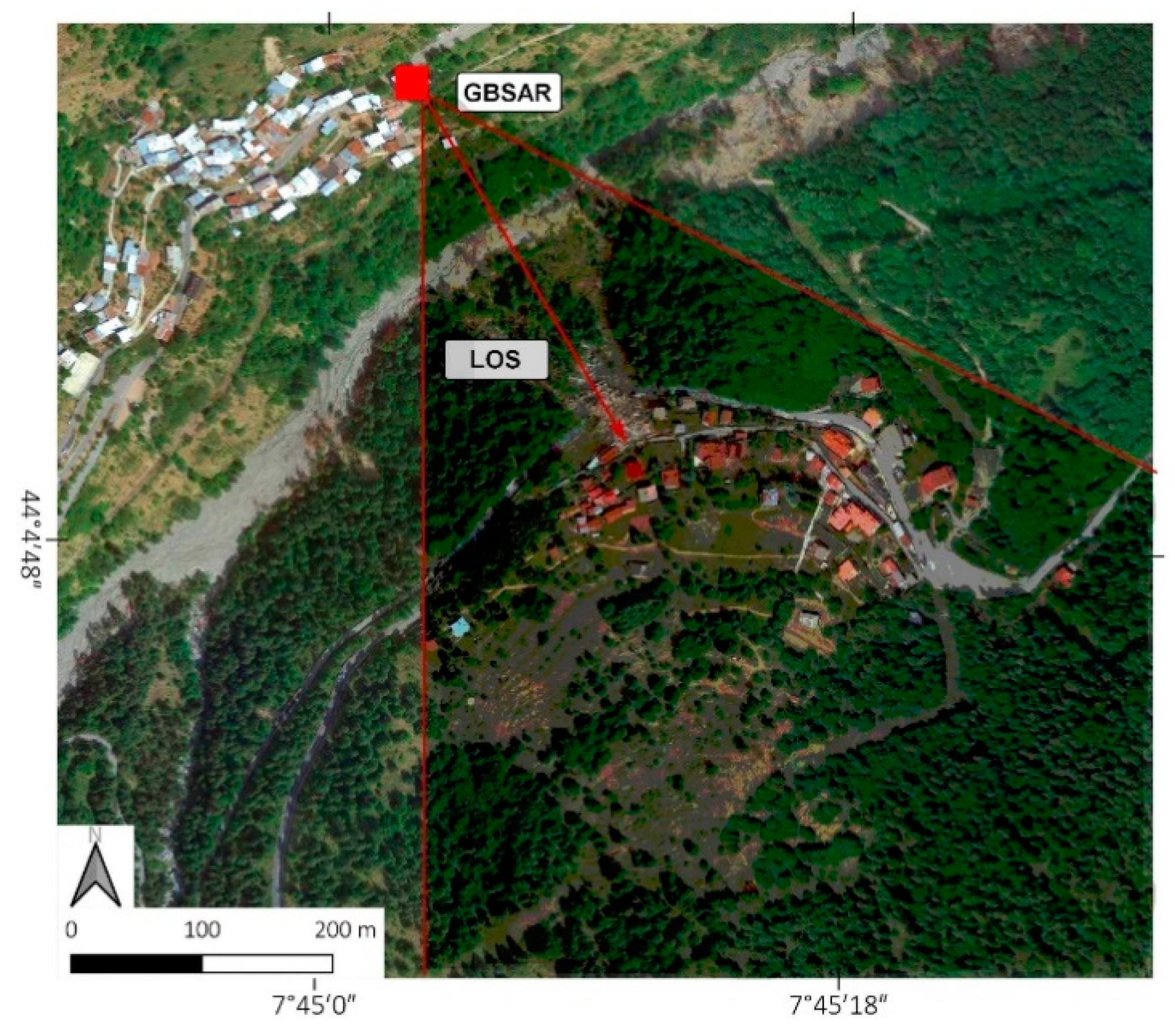
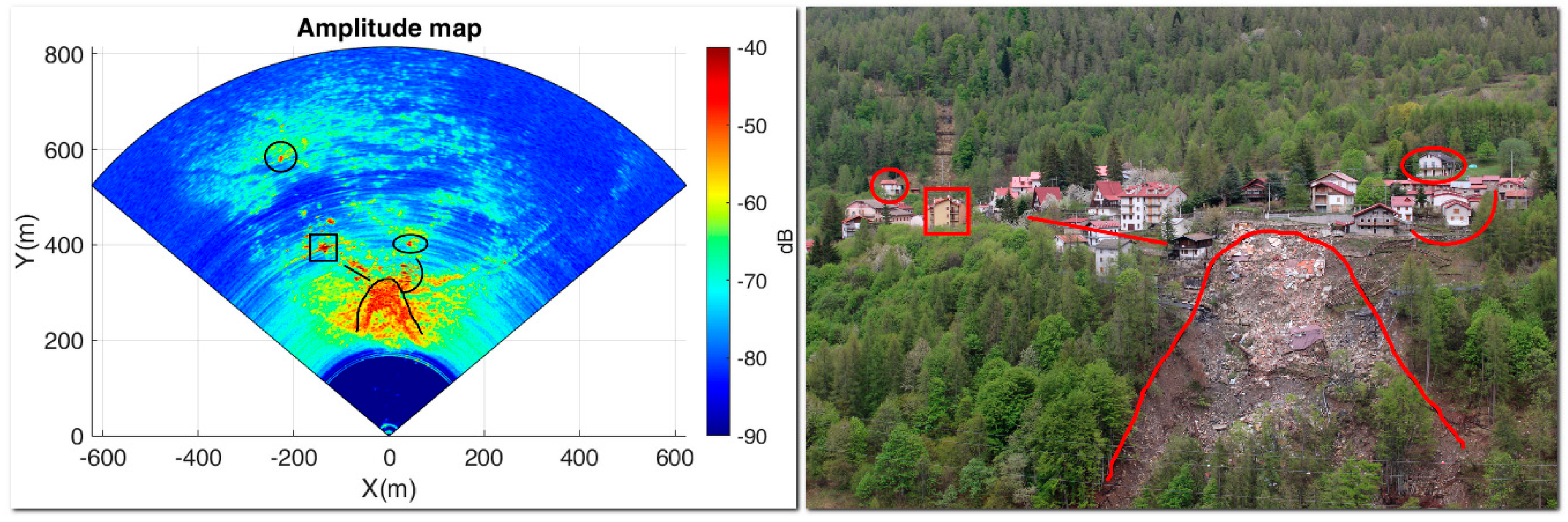
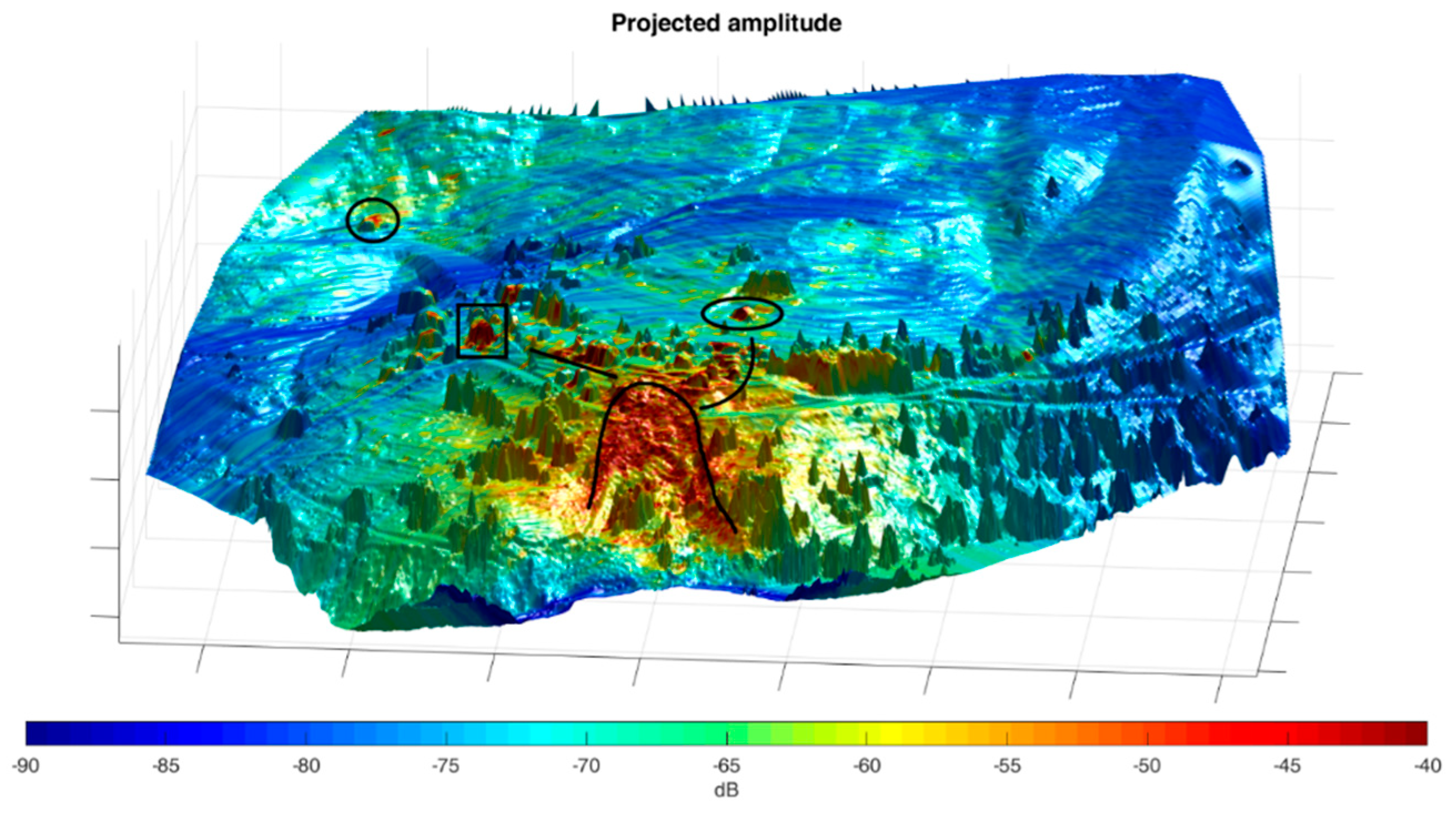
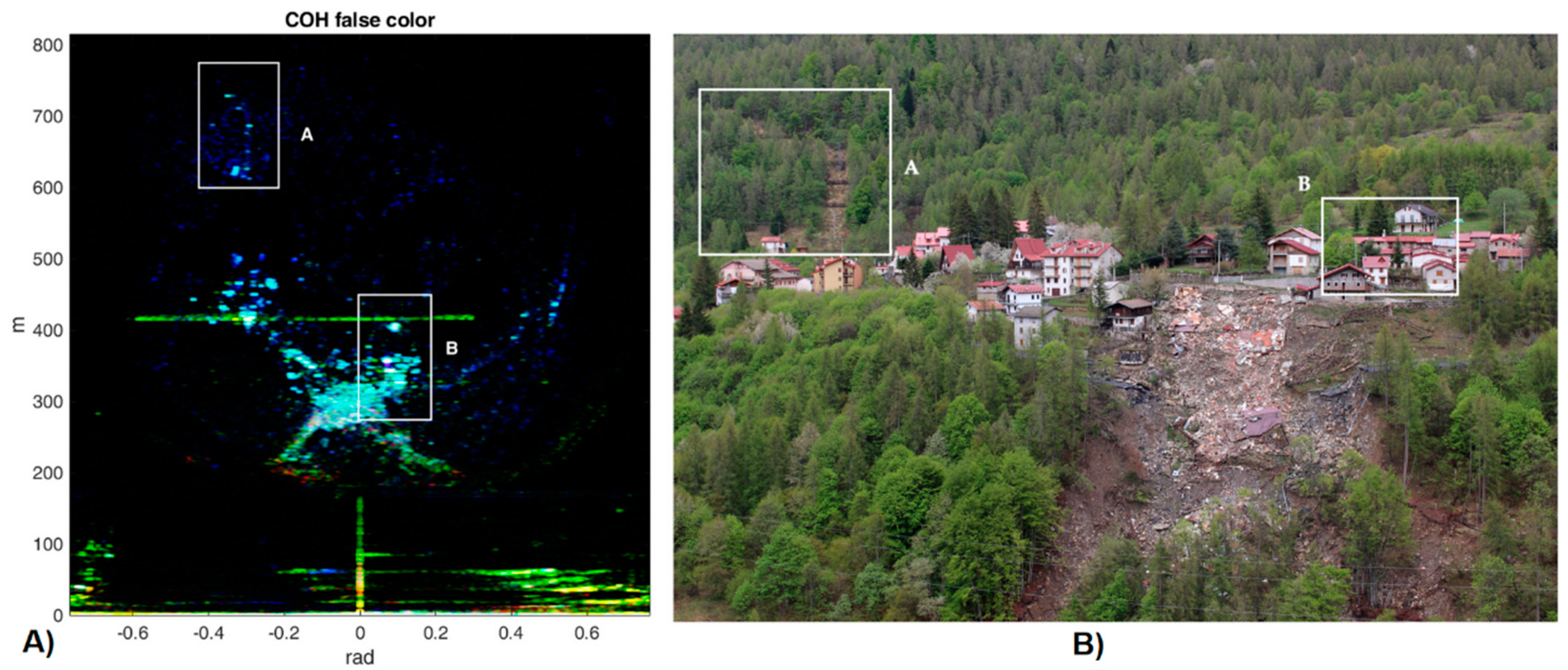
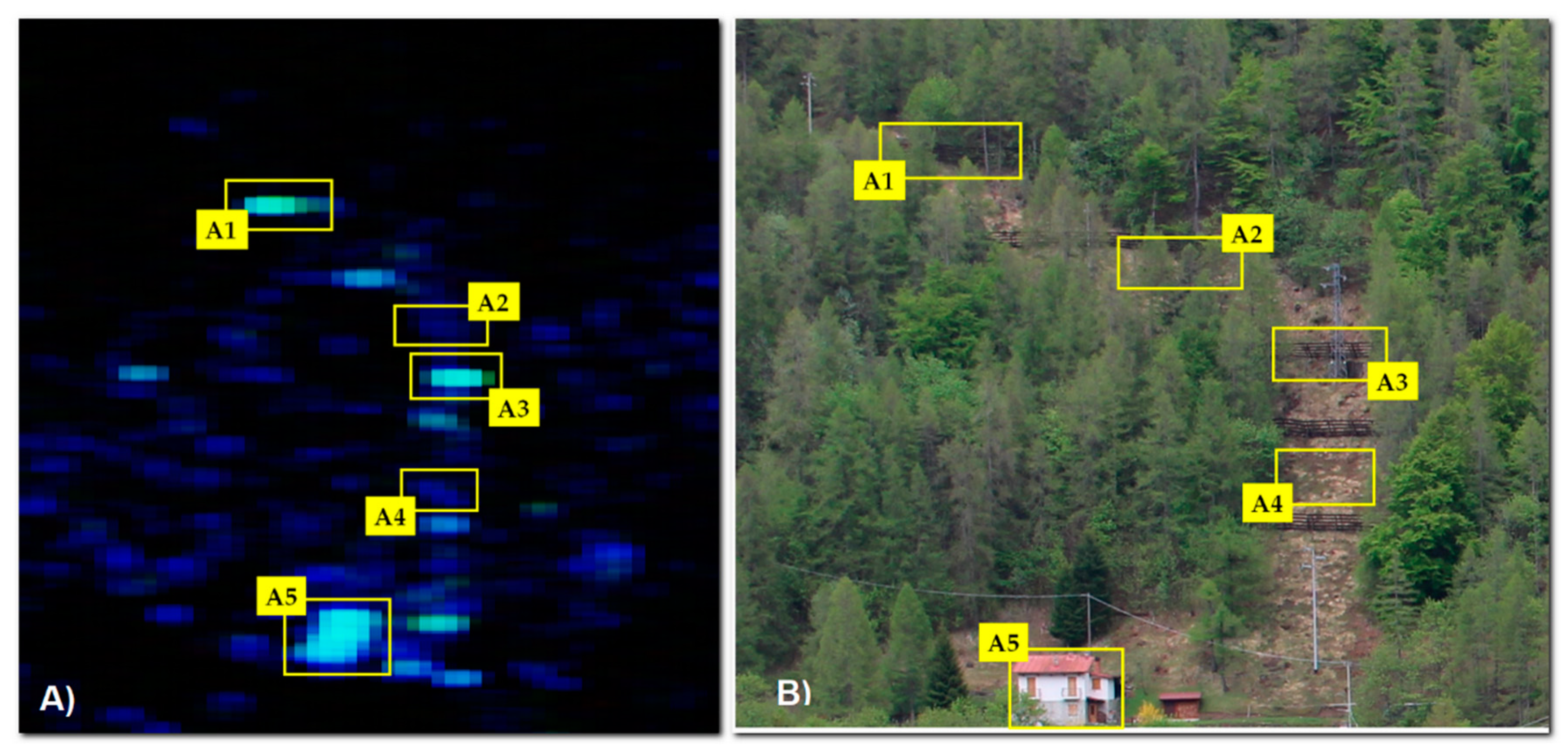
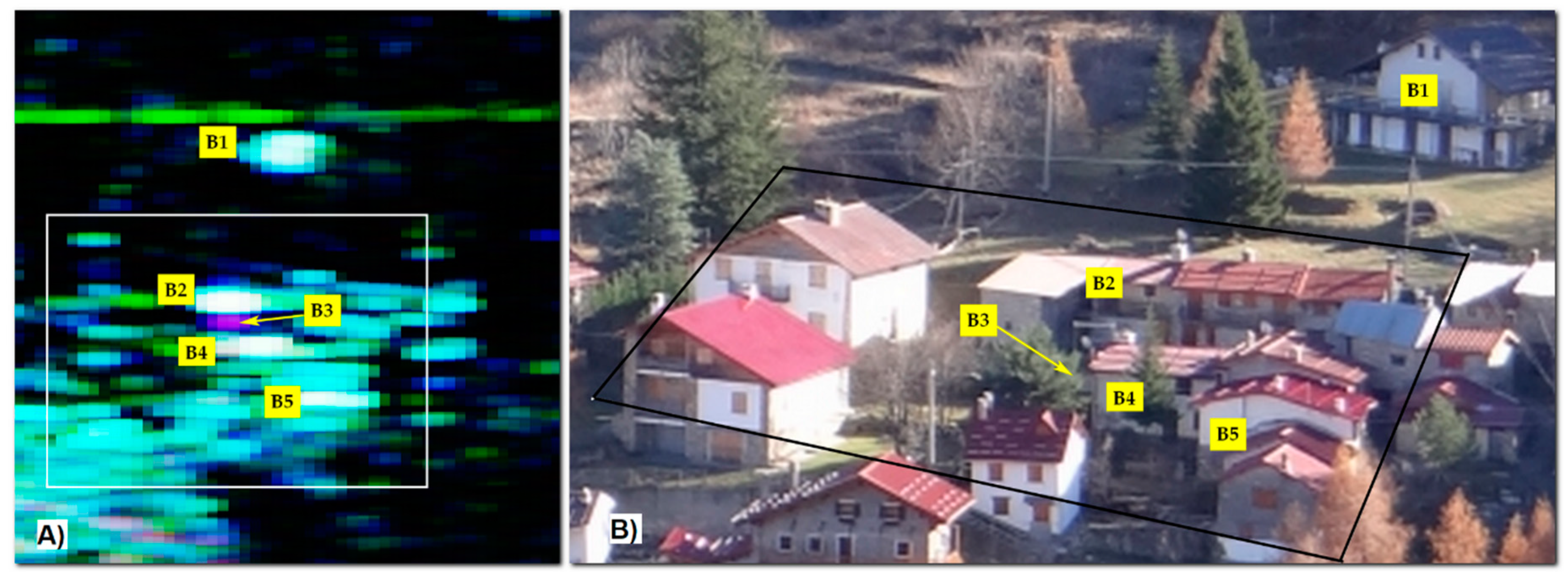
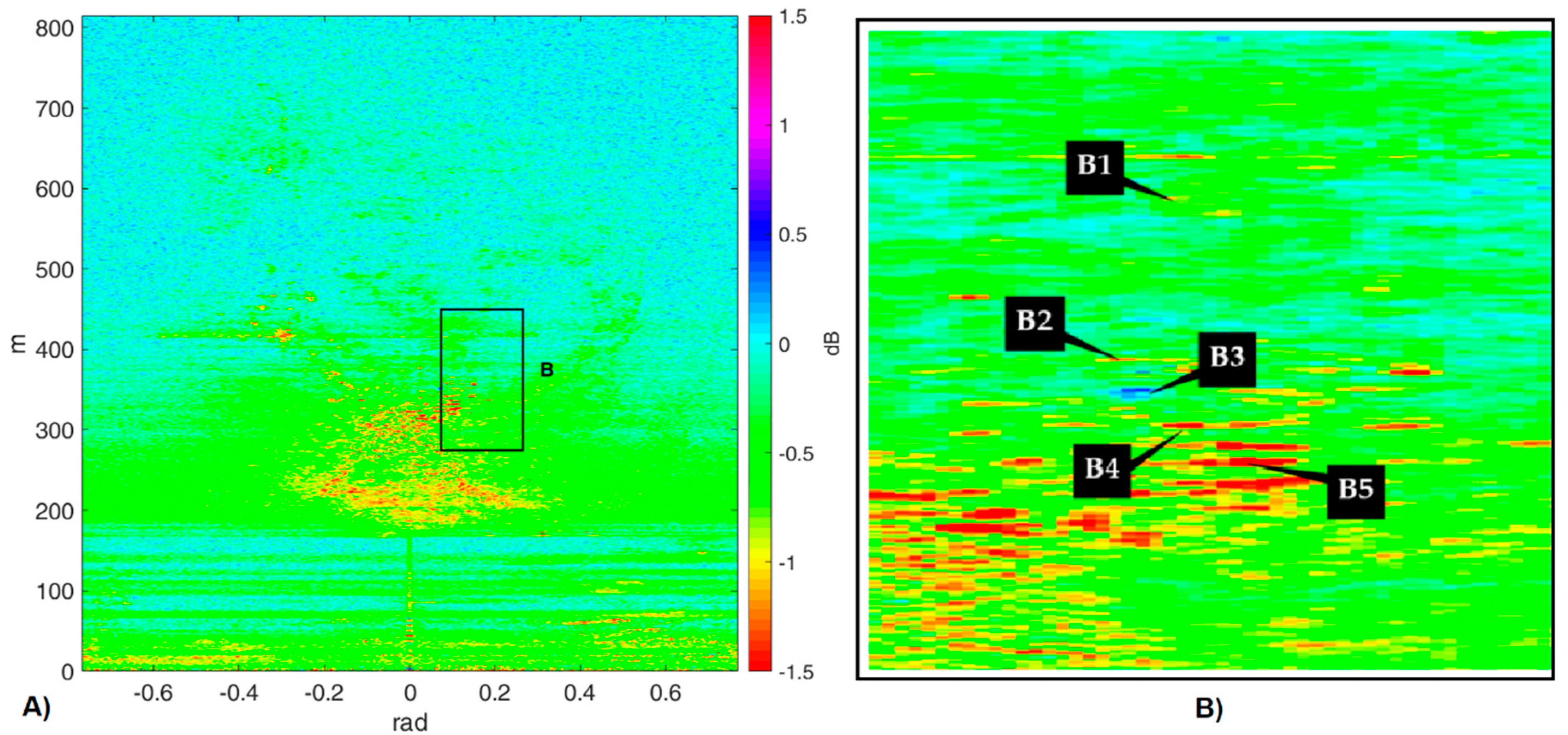
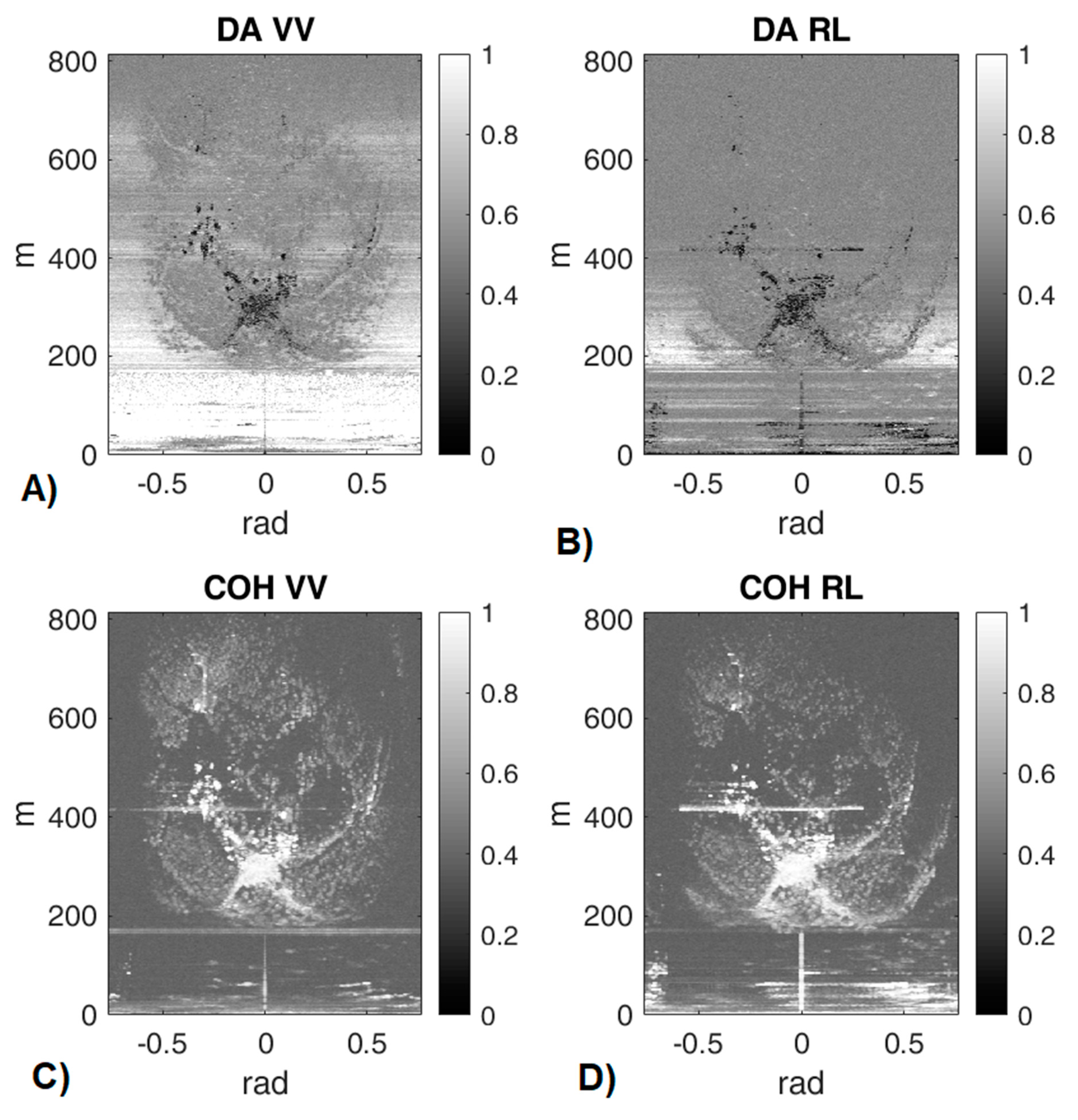
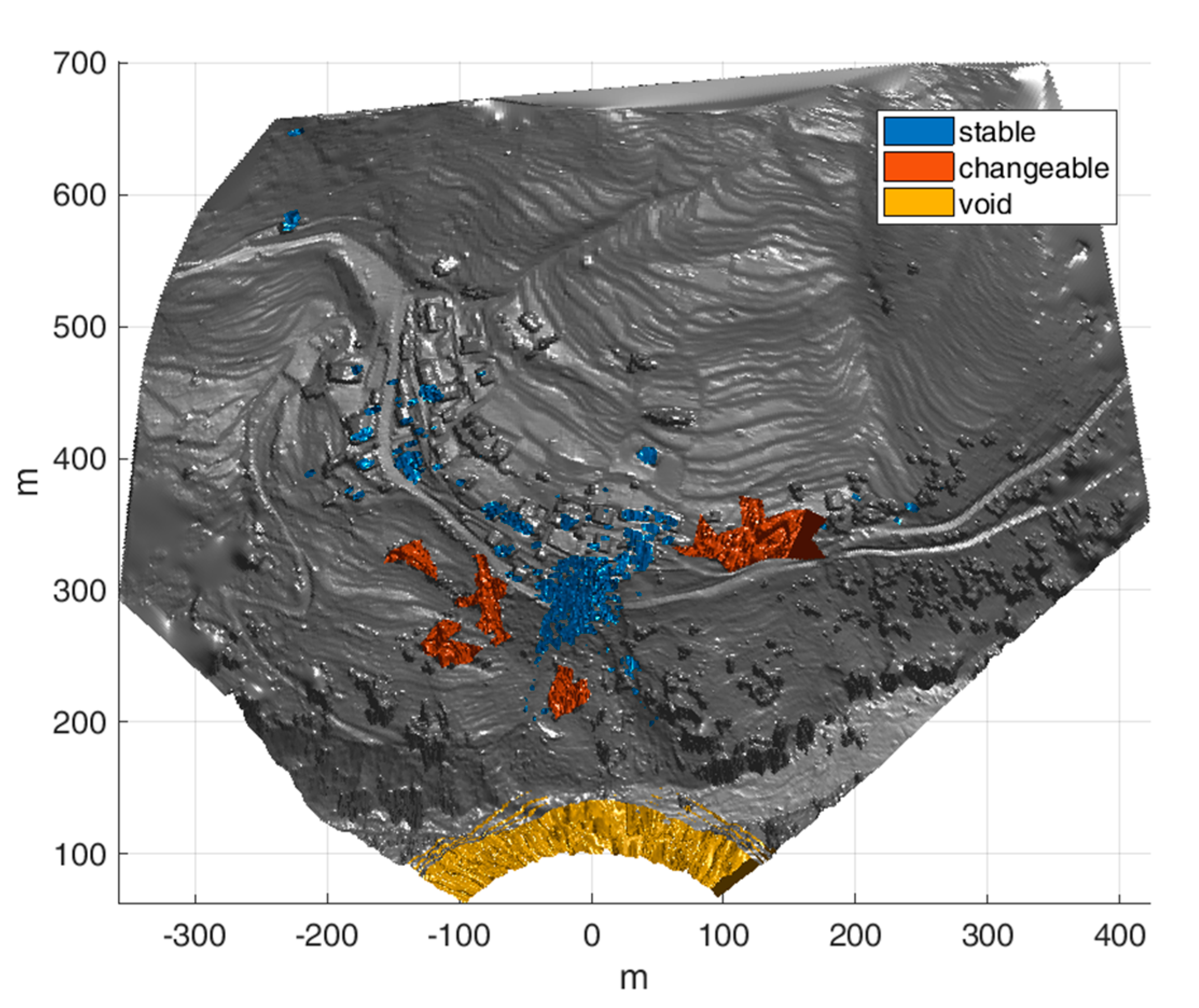
3.3. GBSAR Acquisitions of a Landslide Area
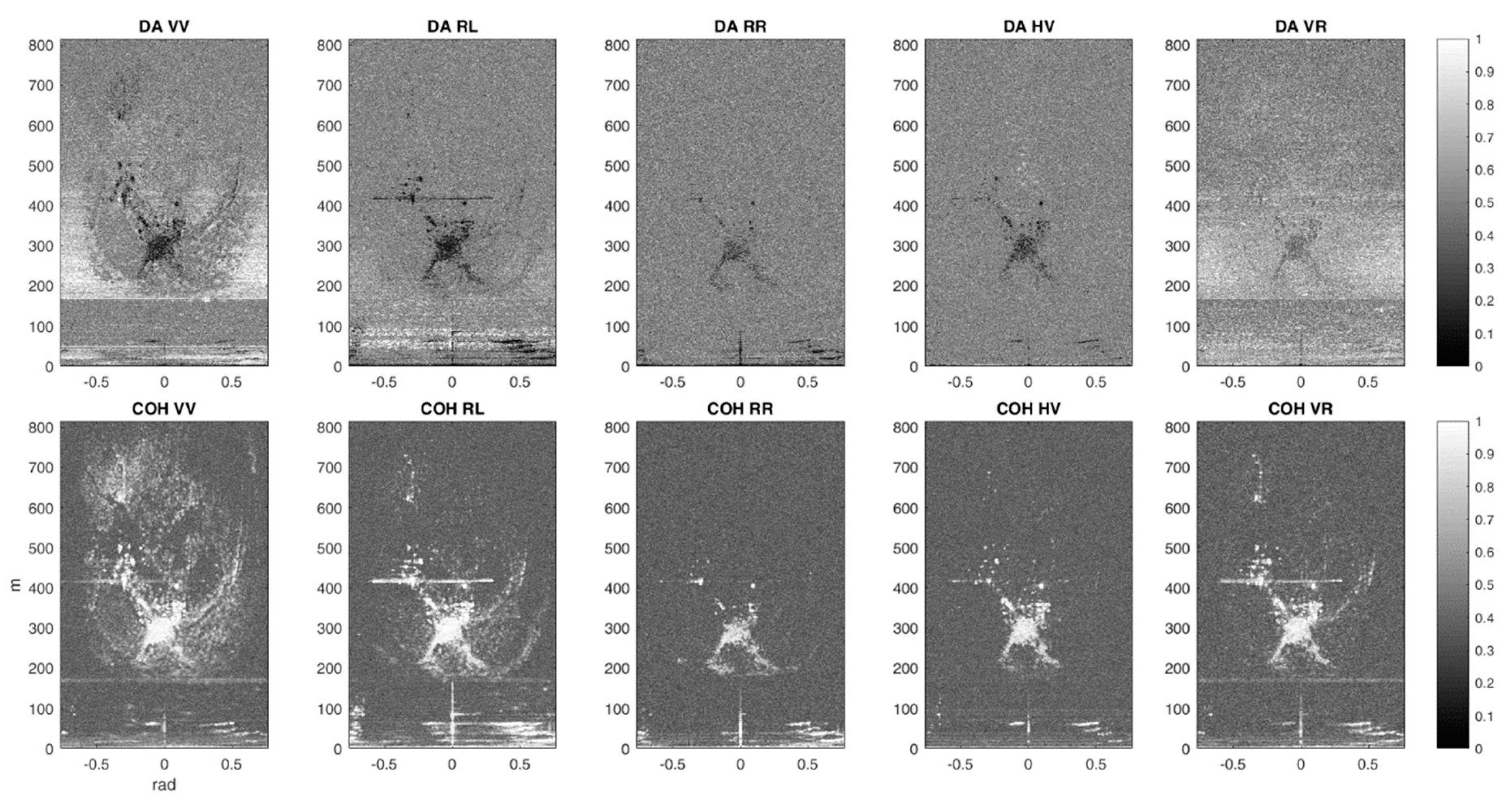
3.3.1. The Short Time Series
3.3.2. The Long Time Series
4. Discussion of the Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Caduff, R.; Schlunegger, F.; Kos, A.; Wiesmann, A. A review of terrestrial radar interferometry for measuring surface change in the geosciences. Earth Surf. Process. Landf. 2015, 40, 208–228. [Google Scholar] [CrossRef]
- Monserrat, O.; Crosetto, M.; Luzi, G. A review of ground-based SAR interferometry for deformation measurement. ISPRS J. Photogramm. Remote Sens. 2014, 93, 40–48. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Abdikan, S.; Sekertekin, A.; Ustunern, M.; Sanli, F.B.; Nasirzadehdizaji, R. Backscatter analysis using multi-temporal SEentinel-1 SAR data for crop growth of maize in Konia basin, Turley. In Proceedings of the ISPRS TC III Mid-Term Symposium “Developments, Technologies and Applications in Remote Sensing”, Beijing, China, 7–10 May 2018; Volume XLII-3, pp. 9–13. [Google Scholar]
- Iglesias, R.; Aguasca, A.; Fabregas, X.; Mallorqui, J.J.; Monells, D.; López-Martínez, C.; Pipia, L. Ground-Based Polarimetric SAR Interferometry for the Monitoring of Terrain Displacement Phenomena–Part I: Theoretical Description. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 980–993. [Google Scholar] [CrossRef]
- Rodelsperger, S.; Coccia, A.; Vicente, D.; Meta, A. Introduction to the new metasensing ground-based SAR: Technical description and data analysis. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 4790–4792. [Google Scholar]
- Baffelli, S.; Frey, O.; Werner, C.; Hajnsek, I. Polarimetric Calibration of the Ku-Band Advanced Polarimetric Radar Interferometer. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2295–2311. [Google Scholar] [CrossRef]
- Bennet, J.C.; Morrison, K. Development of a ground-based polarimetric synthetic aperture radar. In Proceedings of the EEE Aerospace Applications Conference, Aspen, CO, USA, 10 February 1998. [Google Scholar]
- European Communications Committee. Compatibility Studies between Ground Based Synthetic Aperture RADAR and Existing Services in the Range 17.1 GHz to 17.3 GHz. Report 111. 2007. Available online: https://www.ecodocdb.dk/download/04a2c838-7bf3/ECCREP111.PDF (accessed on 29 January 2019).
- Kang, M.K.; Kim, K.E.; Lee, H.; Cho, S.J.; Lee, J.H. Preliminary results of Polarimetric Characteristics for C-band quad–polarization GB-SAR images using H/A/a polarimetric decomposition theorem. Korean J. Remote Sens. 2009, 25, 531–546. [Google Scholar]
- Luzi, G. Ground Based SAR Interferometry: A novel tool for Geoscienc. In Geoscience and Remote Sensing, New Achievements; Imperatore, P., Riccio, D., Eds.; InTech: London, UK, 2010; ISBN 978-953-7619-97-8. [Google Scholar]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Zhou, Z.S.; Boerner, W.M.; Sato, M. Development of a Ground-Based Polarimetric Broadband SAR System for Noninvasive Ground-Truth Validation in Vegetation Monitoring. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1803–1810. [Google Scholar] [CrossRef]
- Brown, S.C.M.; Quegan, S.; Morrison, K.; Bennett, J.C.; Cookmartin, G. High-Resolution Measurements of Scattering in Wheat Canopies—Implications for Crop Parameter Retrieval. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1602–1610. [Google Scholar] [CrossRef]
- Pipia, L.; Fabregas, X.; Aguasca, A.; Lopez-Martinez, C.; Duque, S.; Mallorqui, J.; Marturia, J. Polarimetric Differential SAR Interferometry: First Results with Ground-Based Measurements. IEEE Geosci. Remote Sens. Lett. 2009, 6, 157–171. [Google Scholar] [CrossRef]
- Pipia, L.; Fabregas, X.; Lopez-Martinez, C.; Aguasca, A.; Mallorqui, J.J.; Marturià, J. Polarimetric Temporal Stability of Urban GB-SAR Measurements. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Baffelli, S.; Marino, A.; Frey, O.; Hajnsek, I.; Werner, C. KAPRI KU Band AND Polarimetric-Interferometric ground Based Real Aperture Radar: Calibration and first observations. In Proceedings of the POLINSAR, Frascati, Italy, 26–30 January 2015. [Google Scholar]
- Ferrer, P.J.; López-Martínez, C.; Aguasca, A.; Pipia, L.; González-Arbesú, J.M.; Fabregas, X.; Romeu, J. Transpolarizing Trihedral Corner Reflector Characterization Using a GB-SAR System. IEEE Geosci. Remote Sens. Lett. 2011, 8, 774–778. [Google Scholar] [CrossRef]
- Izumi, Y.; Demirci, S.; Baharuddin, M.Z.; Sumantyo, J.T.S.; Yang, H. Analysis of Circular Polarization Backscattering and Target Decomposition Using GB-SAR. Prog. Electromagn. Res. B 2017, 73, 17–29. [Google Scholar] [CrossRef]
- Izumi, Y.; Demirci, S.; Baharuddin, M.Z.; Waqar, M.M.; Sumantyo, J.T.S. The Development and Comparison of Two Polarimetric Calibration Techniques for Ground-Based Circularly Polarized Radar System. Prog. Electromagn. Res. B 2017, 73, 79–93. [Google Scholar] [CrossRef]
- Najibi, N.; Jin, S. Physical Reflectivity and Polarization Characteristics for Snow and Ice-Covered Surfaces Interacting with GPS Signals. Remote Sens. 2013, 5, 4006–4030. [Google Scholar] [CrossRef]
- Spudis, P.D.; Bussey, D.B.J.; Baloga, S.M.; Butler, B.J.; Carl, D.; Carter, L.M.; Chakraborty, M.; Elphic, R.C.; Gillis-Davis, J.J.; Goswami, J.N.; et al. Initial results for the north pole of the Moon from Mini-SAR, Chandrayaan-1 mission. Geophys. Phys. Res. Lett. 2010, 37, L06204. [Google Scholar] [CrossRef]
- Campbell, A. High circular polarization ratios in radar scattering from geologic targets. J. Geophys. Res. 2012, 117, E06008. [Google Scholar] [CrossRef]
- Ferré, R.; Mira, F.; Luzi, G.; Mateu, J.; Kalialakis, C. A Ku band circularly polarized 2 × 2 microstrip antenna array for remote sensing applications. In Proceedings of the International Applied Computational Electromagnetics Society Symposium, Florence Italy, 26–30 March 2017. [Google Scholar]
- Coppi, F.; Gentile, C.; Ricci, P. A software tool for processing the displacement time series extracted from raw radar data. In Proceedings of the 9th International Conference on Vibration Measurements by Laser and Non-Contact Techniques, Ancona, Italy, 22–25 June 2010. [Google Scholar]
- Pieraccini, M. Monitoring of Civil Infrastructures by Interferometric Radar: A Review. Sci. World J. 2013, 2013, 786961. [Google Scholar] [CrossRef] [PubMed]
- Boskovic, N.; Jokanovic, B.; Olivieri, F.; Tarchi, D. High gain printed antenna array for FMCW radar at 17 GHz. In Proceedings of the 12th International Conference on Telecommunication in Modern Satellite, Cable and Broadcasting Services, Nis, Serbia, 14–17 October 2015. [Google Scholar]
- Toh, B.Y.; Cahill, R.; Fusco, V.F. Understanding and Measuring Circular Polarization. IEEE Trans. Educ. 2003, 46, 313–318. [Google Scholar]
- Ansys Corporation. HFSS; Suite v15; Ansys Corporation: Pittsburg, CA, USA, 2014. [Google Scholar]
- Skolnik, M. Introduction to Radar Systems, 2nd ed.; McGraw Hill Book Co.: New York, NY, USA, 1980. [Google Scholar]
- Heimdall Collaborative Project Call/Topic H2020-SEC-2016-2017/H2020-SEC-2016-2017-1 Title Multi-Hazard Cooperative Management Tool for Data Exchange, Response Planning and Scenario Building. Project Number 740689 Project Acronym HEIMDALL. Available online: http://heimdall-h2020.eu/ (accessed on 29 January 2019).
- Dematteis, N.; Luzi, G.; Giordan, D.; Zucca, F.; Allasia, P. Monitoring Alpine glacier surface deformations with GB-SAR. Remote Sens. Lett. 2017, 10, 947–956. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameters | ||
|---|---|---|
| Mode | RAR | SAR |
| Central frequency/wavelength | 17.1 GHz/0.0175 m | 17.1 GHz/0.0175 m |
| Range resolution | 0.5 m | 0.5 m |
| Azimuth resolution | NA | 4.4 mrad (<2 m @ 500 m) |
| Maximum Range | 400 m | 4 km |
| Sampling frequency | 200 Hz | 6 min |
| Output Data format | 1D Range profile | 2D Images |
| Measurement 1 | Measurement 2 | |
|---|---|---|
 |  | |
| Transmitting antenna | Horn 20 dB Pol: V | Patch LHCP/RHCP |
| Receiving antenna | Patch RHCP | Patch RHCP/LHCP |
| Max received power (db) | 60 dB | 50 db ± 1 dB |
| Measurement 1 | Measurement 2 | Measurement 1 | |
|---|---|---|---|
 |  |  | |
| Transmitting antenna | Horn 20 dB. Pol: V | Patch LHCP | Patch RHCP |
| Receiving antenna | Horn 20 dB. Pol: V | Patch RHCP | Patch RHCP |
| Max received power (db) | 77 dB | 60 db | 37 dB |
| Symbol | Pol Transmitting Antenna | Pol Receiving Antenna | # Images |
|---|---|---|---|
| VV | Linear vertical | Linear vertical | 20 |
| RL | Circular right-hand | Circular left-hand | 20 |
| RR | Circular right-hand | Circular right-hand | 16 |
| HV | Linear horizontal | Linear vertical | 14 |
| VR | Linear vertical | Circular right-hand | 20 |
| Target | Red VV | Green RL | Blue RR |
|---|---|---|---|
| B1 | 222 | 250 | 250 |
| B2 | 250 | 255 | 250 |
| B3 | 173 | 23 | 240 |
| B4 | 245 | 255 | 250 |
| B5 | 1 | 245 | 250 |
| Symbol | Pol Transmitting Antenna | Pol Receiving Antenna | # Images |
|---|---|---|---|
| VV | Linear vertical | Linear vertical | 200 |
| RL | Circular right-hand | Circular left-hand | 185 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luzi, G.; Dematteis, N. Ku Band Terrestrial Radar Observations by Means of Circular Polarized Antennas. Remote Sens. 2019, 11, 270. https://doi.org/10.3390/rs11030270
Luzi G, Dematteis N. Ku Band Terrestrial Radar Observations by Means of Circular Polarized Antennas. Remote Sensing. 2019; 11(3):270. https://doi.org/10.3390/rs11030270
Chicago/Turabian StyleLuzi, Guido, and Niccolò Dematteis. 2019. "Ku Band Terrestrial Radar Observations by Means of Circular Polarized Antennas" Remote Sensing 11, no. 3: 270. https://doi.org/10.3390/rs11030270
APA StyleLuzi, G., & Dematteis, N. (2019). Ku Band Terrestrial Radar Observations by Means of Circular Polarized Antennas. Remote Sensing, 11(3), 270. https://doi.org/10.3390/rs11030270