1. Introduction
The Tibetan Plateau (TiP) is known to be crucial (1) for the global atmospheric circulation with special reference to the east Asian monsoon system and (2) for humans who depend on the water supply by rivers originating in the high mountains of the TiP [
1]. Particularly for (2), the exact knowledge on the spatial extent and temporal development of precipitation is of utmost importance. Unfortunately, precipitation on the TiP is not well observed. The high elevated plateau (ca. 4500 m a.s.l. on average) with its complex terrain challenges the installation and maintenance of climate stations and weather radars [
2]. On the monthly and annual scale, many attempts have been made over the last few decades to extrapolate the rain gauge networks with a coarse spatial resolution to produce area-wide rainfall information in a high spatial resolution (e.g., [
3,
4]). On the other hand, downscaling reanalysis data [
5,
6] and specific model based hindcast approaches [
7,
8,
9] provided a significant progress in high resolution rainfall information for the plateau. Regarding real observations in very high spatio-temporal resolution, satellite-based precipitation retrievals might help to properly understand precipitation behaviour in space and time. TRMM-based (Tropical Rainfall Measuring Mission) products are frequently used to characterize the spatio-temporal rainfall pattern of high Asia and the TiP [
10,
11,
12,
13], which, however, showed some biases, particularly without taking additional factors such as topography into account (e.g., [
14]). In comparison to the polar or inclined orbiting satellite systems (such as TRMM) which have a restricted temporal resolution, satellites from the geostationary orbit (GEO) warrant a very high temporal resolution (15–30 min) that is superior to observe highly dynamic precipitation events e.g., from convective storms. Many algorithms have been successfully developed so far for GEO systems such as Geostationary Operational Environmental Satellite (GOES), Himawari and Meteosat, in the last few years mainly based on machine learning [
15,
16,
17,
18,
19,
20,
21]. Accuracies (Probability of Detection, POD) up to 0.6 could be reached for a precipitation amount while better results are achieved by solely classifying the precipitating areas [
22]. The discrimination between liquid and solid precipitation is not conducted in these studies. A basal setback for GEO applications over the TiP is the fact that the satellite systems mentioned above hardly cover the plateau because of a low viewing angle. For the more central GEO’s such as the Russian Elektro-L2 and the Indian Insat-3D system, hardly any studies on precipitation retrieval over the TiP are conducted. Even the new Modified-IMSRA (M-IMSRA) algorithm of the Indian Meteorological Department (IMD), combining precipitation area delineation and rainfall retrieval, is mostly applied to the Indian subcontinent [
23]. To combine the high temporal resolution of GEO retrieval and the advantages of passive and active microwave radiances for rainfall retrieval, several hybrid approaches were developed: CMORPH (Climate Prediction Center MORPHing technique; [
24]), PERSIANN (Precipitation Estimation from Remotely Sensed Information using Artificial Neural Networks; [
25,
26]) and TMPA (TRMM Multi-satellite Precipitation Analysis [
27,
28]). Applied to the TiP, CMORPH was proven to over-/underestimate the frequency of low/high precipitation [
29]. CMORPH and TMPA were found superior to PERSIANN where all retrievals showed more problems over the more arid regions of the TiP [
30,
31].
The newest generation hybrid retrieval combining active and passive microwave (MW), GEO-IR and ground data are the Integrated Multi-satellitE Retrievals for GPM (IMERG) from the Global Precipitation Measurement mission (GPM) [
28,
32]. IMERG provides the microwave only estimates, morphed precipitation estimates, infrared (IR) only precipitation and gauge calibrated MW precipitation. The quality of the different products vary within IMERG. The radiative signatures from MW sensors are able to see through clouds and have therefore a direct connection with rainfall [
28,
33,
34]. Hence, MW estimates provide accurate precipitation retrievals. IMERG intends to use MW estimates whenever possible. Over snowy/icy surfaces, IR data are used because passive microwave (PMW) data are not reliable. The MW estimates were cross calibrated between all instruments with reference to the GPM imager GMI. The DPR (dual-frequency precipitation radar) and the GMI from the GPM core instrument are combined to retrieve precipitation estimates (GPM Combined Radar-Radiometer CORRA) [
32,
35]. However, MW precipitation estimates tend to underestimate the number of rain events [
14,
28,
36,
37]. To improve the MW precipitation estimates, IMERG provides MW precipitation, which is calibrated against gauge observations over land. It should be stressed that the precipitation estimates derived from IR only are developed by just using one single band (10.8
m) from GEO satellites. These simple estimates suffer from the indirect relationship between IR and precipitation and the use of only one spectral band which highlights the uncertainty of this product. Tan et al. [
28] analyzed the sources of error in IMERG and find that IR only precipitation performs poorly and remarkably fails to identify rain events. They conclude that, due to the misses, IR only issues an underestimation of precipitation. Tests on the TiP in comparison to TRMM products showed that warm season and light rainfall were captured with higher accuracy but high altitude (>4500 m) precipitation partly with slightly lower accuracy [
38,
39].
In summary, there is still a large amount of uncertainty in precipitation retrieval even in the newest generation products due to various reasons. One main problem seems to be the still insufficient delineation of the precipitating areas in different regimes (dry, moist areas) and topographies, combined with a very restricted use of GEO IR data in the hybrid products.
Thus, we generally focus on an improvement of precipitation retrieval by (i) the best GEO selection for the TiP, (ii) combining the full spectral range of second generation GEO systems with (iii) the powerful tools of machine learning technology (Random Forest, RF). In this paper, we develop a precipitation methodology to delineate precipitating areas using a combination of Insat-3D and Elektro-L2. We therefore present various tests to select the best model to delineate precipitating areas on the TiP. RF models are trained by the high quality, gauge calibrated MW estimates from IMERG [
28,
31]. The classification results are validated against independent GPM IMERG data not used for model training.
3. Results
3.1. Results of the Selection of the Best Model
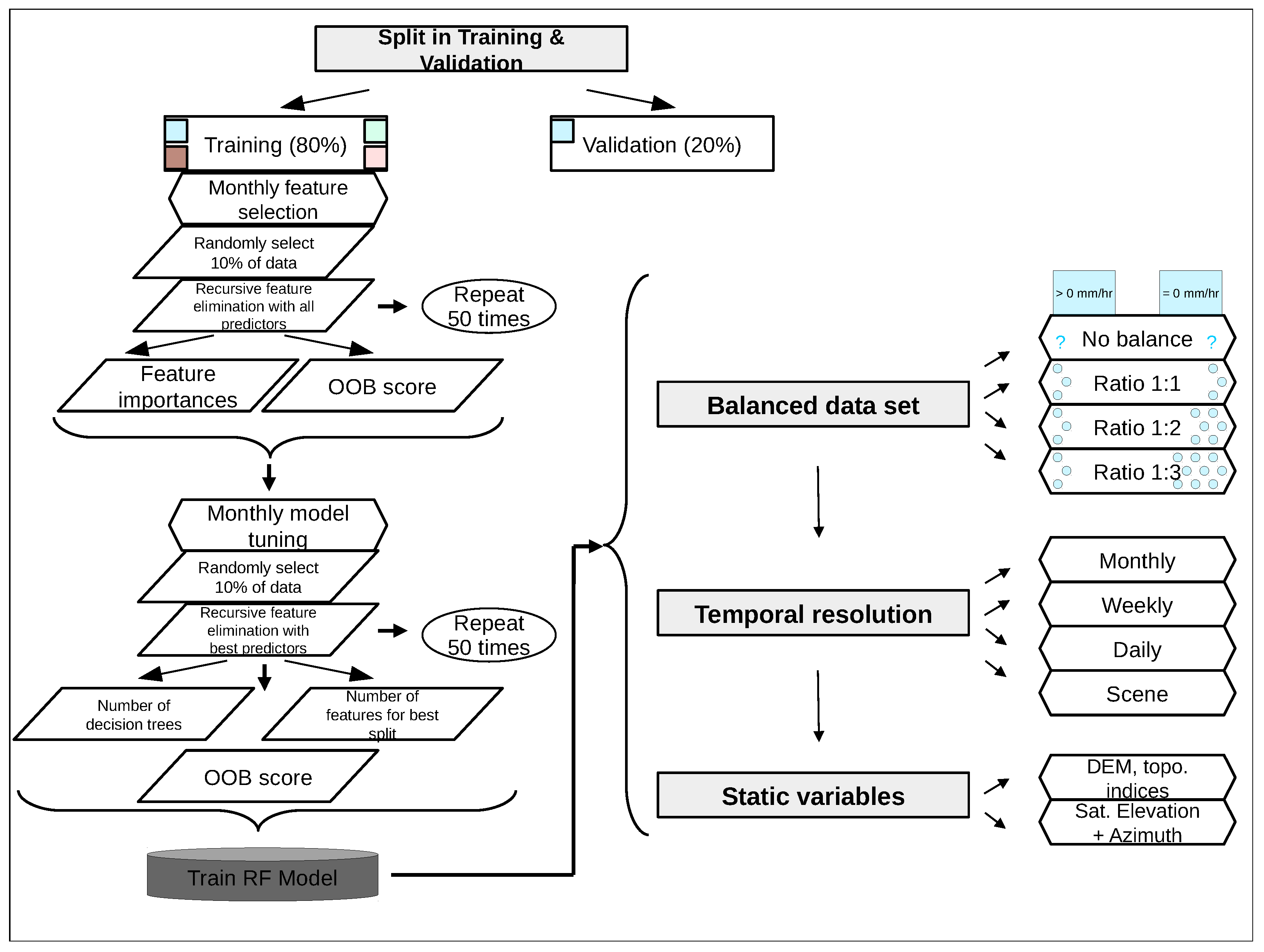
The feature selection and tuning were performed on a monthly basis, whereas the training was performed on a monthly, weekly, daily and scene based resolution. All of these temporal variations were also tested using a different amount of non-rainy pixels (unbalanced, ratio of 1:1, ratio1:2 and ratio of 1:3).
The results from the model training on a monthly and unbalanced selected pixel basis revealed the following model performance. The POD was very high ranging from 0.76–0.83 for the five test weeks and the POFD was very low at around 0.08. However, the FAR was very high (0.76 on average). The HSS was especially low in the less rainy seasons like May and September with values 0.15–0.25 and higher in the rainy months like June, July and August (0.37 on average). The PC was overall very high at 0.93 since most rainy pixels are recognized correctly by the model.
The POD was for all temporal resolutions stable and ranged from 0.73–0.87 with an unbalanced choice of pixels regarding all test weeks. When using the ratio of 1:1, the POD dropped for all temporal resolutions because this ratio highly overestimates the true distribution of rainfall data. The POD ranged between 0.22–0.41. We tested the ratio1:2 which resulted in a higher POD compared the ratio of 1:1 and a lower POD than the unbalanced choice (0.33–0.52). Training the RF models with a ratio of 1:3 led to a moderate POD of 0.40–0.61 for all temporal resolutions. The POFD was overall low for all tests ranging between 0.01–0.08.
The FAR decreased in all test weeks with increasing temporal resolution (e.g., from a monthly to weekly resolution) using the unbalanced option when training the RF model. Using the unbalanced choice of pixels, however, led to enormous high FAR up to 0.9. The FAR dropped rapidly when the models were trained using the ratio of 1:1. Modeling with the ratio of 1:1 led to an improvement of the FAR on all time scales which could be reduced down to 0.11. The FAR increased for all temporal scales when the models were trained using the ratio1:2 and ratio of 1:3. However, the POD in both cases was higher compared to the POD of the ratio of 1:1 at all temporal scales.
The HSS displays the overall performance of the model. The HSS increased when the temporal resolution decreased. This is due to the decreasing FAR with decreasing temporal resolution. The highest HSS was found when training the model on a scene basis. Regarding the amount of rainy pixels for training, we find that the HSS was highest when trained with the ratio of 1:3.
The PC was lowest for all temporal resolutions when the model is trained with a ratio of 1:1 (0.79–0.86). It increased for all test weeks with a ratio of 1:2 and reached very good results when the model is either trained unbalanced or with a ratio of 1:3 (up to 0.93). The PC in the unbalanced ratio was very high due to the many correctly negative classified pixels.
To summarize, we find that training the models on a scene basis together with the ratio of 1:3 performs best. This means that we choose all rainy pixels and the triple amount of non-rainy pixels for each scene separately. We also find that the results improve with increasing temporal resolution (see
Figure 5).
Although other studies improved their model performance by the use of static predictors, we found that there is hardly any difference when training the model using static predictors on a scene basis with a ratio of 1:3 (see
Figure 2 and
Table 3). In order to test the effect of static predictors, we performed a separate feature selection and a separate RF parameter tuning on a monthly basis (see
Table 6 for the comparison).
Figure 6 displays the validation scores for the precipitation area delineation for 5–12 July 2017. There are some differences in the POD, FAR and HSS, but hardly any differences in the POFD and PC. The HSS is highest when the POD is high and the FAR low.
Figure 7 states that low precipitation rates (<10th percentile) are prone to errors with a relatively low POD and a high FAR, whereas high precipitation rates (>90th percentile) display a very POD (ca. 0.9), and a low FAR (ca. 0.2). The POD and HSS increase with increasing precipitation rates, whereas the FAR decreases with increasing precipitation rates.
A reason for that might be that clouds with low precipitation amounts do not differ much from non-precipitating clouds in terms of their top temperatures in the different channels. By contrast, the top cloud temperatures from clouds that lead to high amounts of precipitation can be distinguished more easily from the non-precipitating clouds because of the significant temperature differences.
3.2. Results of the Comparison between the New Precipitation Area Delineation and IMERG’s IR Only Precipitation
The best model was compared to the IR only product which uses only one spectral band for precipitation retrieval (see
Table 7). Compared to IMERG’s IR only, the new precipitation delineation based on Elektro-L2 and Insat-3D displayed a higher POD (0.4–0.59) than IR only (0.24 on average) which highly underestimates precipitation events. The POFD of IR only is comparably low. The FAR is extremely high (between 0.43–0.99) compared to the new precipitation delineation. The HSS and partly the PC of IR only produce lower values (HSS at 0.19 and PC at 0.84 on average for all months), which stresses the improvement of the new multispectral delineation.
Figure 8 shows an example of a scene from 7 July 2017 at 4:00 p.m. UTC. Grey represents the MW swath where the gauge calibrated MW precipitation is available and no clouds occur. The white areas are masked out due to a low quality index below 0.9 which indicates that these areas could not be filled with gauge calibrated MW precipitation and therefore are probably snow or ice covered. The white areas cannot be used for training and validation. The colours yellow (TN), red (FN), blue (FP) and green (TP) indicate the verification measures. The left graphic depicts the performance of the new precipitation area delineation based on the gauge calibrated MW precipitation from IMERG.
The graphic on the right shows the differences in the IR only and gauge calibrated MW precipitation product for 7 July 2017 at 4:00 p.m. UTC on the TiP as an example. It indicates that IR only does not capture the precipitating areas which occur in the gauge calibrated MW precipitation product (FN) and also produces some False Positives (FP) where no precipitation occurred.
Our findings show that our model performs better than IR only precipitation compared to IMERG’s gauge calibrated MW precipitation.
Figure 9 distinguishes the modeling performance of IR only in low (<10th percentile), medium (between > 10th and < 90th percentile) and high (>90th percentile) precipitation rates. It reveals that high precipitation rates are easier to detect compared to low precipitation rates by IR only. The POFD is comparably low and the FAR decreases with high precipitation rates. The HSS increases with the increase in precipitation. The PC decreases in comparison from high to low precipitation rates.
4. Discussion
In this study we present the first rain area delineation on the TiP based on GEO satellite data which are fully validated across space and time.
Due to the missing IMERG independent gauge and weather radar network on the TiP, the variety of validation data are restricted. We therefore use the gauge calibrated MW precipitation from IMERG which was excluded from the feature selection, tuning and training processes to gain independent precipitation data.
Before modeling, we defined conditions for the selection of the data (see
Section 2.3 RF model training and validation). When checking the data, we found pixels in the gauge calibrated MW precipitation of IMERG which are flagged as rainy but are not marked as cloudy in the Insat-3D cloud mask. Since they do not fulfill the condition of being cloudy in the cloud mask, they are excluded from training and validation. Some of these pixels were classified as probably cloudy in the cloud mask of Insat-3D. However, we decided to use only those pixels which were clearly classified as cloudy.
We also note that many pixels in all seasons, but especially in May and September, are frequently masked out due to IMERG’s quality index, which, in these cases, is below 0.9. The snow and ice covered areas are not used for precipitation retrieval. The IMERG algorithm adds IR information when MW is not able to produce reliable estimates due to the high reflectance of snow and ice. The IR reduces the quality of the precipitation estimates, which are then excluded from training and validation.
Due to computational effort, we performed the feature selection and RF parameter tuning only once; however, the results might change when performing a feature selection for all of the different settings of the models.
There are several possibilities for the failure of the precipitation area delineation. We find that the detection of high precipitation amounts (above 90th percentile) is quite well captured by the new precipitation delineation, whereas low precipitation (below 10th percentile) performs poorly. The medium range of precipitation (between 10th and 90th percentile) is better (worse) captured (1) than precipitation below (above) the 10th (90th) percentile and (2) in the rainy season. Our results indicate that low precipitation rates are hard to capture using GEO satellite data. The difference of the brightness temperatures between precipitating and non-precipitating pixels, especially for low precipitation rates, is not inconsistent and leads to false results. In addition, a high FAR indicates that the model is not able to sufficiently differ between precipitation and no precipitation. High precipitation rates are especially important regarding disaster management and water availability for humans.
Adding static predictors did not change our results. We assume that, due to the rather coarse monthly basis, the feature selection did not include many of the static predictors, which, therefore, did not change the results much.
Our study shows that precipitation area delineation works best in the rainy months (July, August). We found quite a poor performance for the rather dry months May and September. The precipitating areas in June are captured with intermediate accuracy.
We tested four different temporal resolutions and found that scene based trained models performed best. Coarse temporal resolutions like monthly trained models instead lead to worse results. Daily and weekly trained models performed at an intermediate level, with a better tendency of daily models to capture precipitation. Furthermore, we tested four different balancing methods when training the model. We found that there are differences in the performance when changing the balance of rainy and non-rainy pixels. Both tests changed the results which indicates that the data input highly affects the prediction outcome. Depending on the modeling approach, the training data should be selected carefully.
We use IMERG’s gauge calibrated MW precipitation for training and validation because it is the most reliable satellite precipitation product within IMERG [
28]. However, it is restricted to those areas where MW is available. The gaps, where MW is not available, are filled in IMERG with IR based on one single band from GEO satellites. The indirect relation between IR and precipitation leads to an underestimation of precipitation. However, the IR is more frequently available compared to the MW precipitation. IMERG’s IR only product is not able to capture precipitation precisely.
We showed that our precipitation area delineation outperforms the IR only precipitation from IMERG. This is due to the very low POD (missing precipitation) and the very high FAR in the IR only product. We therefore conclude that multispectral IR information enhances the precipitation area classification results.
Figure 10 displays the distribution of the validation measures covering the available data in 2017 (
Figure 10a–d). There is hardly any pattern visible for TP, FP and FN, but the TN are found to mostly occur in the south of the TiP. The western part of the TiP contains frequently masked out areas covered with snow and ice leading to data gaps in all verification measures. The gauge calibrated MW precipitation totals (
Figure 10e) and the frequency of gauge calibrated MW precipitation (
Figure 10f) capture the dry western and some northern parts of the TiP, whereas the south and southeast are moist and influenced by (1) orographic effects and (2) the monsoon.
Other studies also focus on the classification of precipitating areas. To this end, the Meteosat Second Generation (MSG) Spinning Enhanced Visible and InfraRed Imager (SEVIRI) data with its resolution of 3 km and 15 min or the Himawari-8 with its 2 km and 15 min resolution are used several times for various areas [
15,
16,
17,
18,
19,
20,
21]. Thies et al. [
17] discriminate raining from non-raining cloud areas over Germany using MSG SEVIRI with reference to a German Weather radar product and found for night-time a POD of 0.6, a POFD of 0.2 and a FAR of 0.5. They also find comparable results for daytime. In their study about precipitation process and rainfall intensity differentiation, Thies et al. [
18] use the detection of the precipitation areas together with the precipitation process to assign the precipitation rates. The POD varies between 0.1–0.7, whereas the POFD varies between 0–0.6, the FAR is between 0.3–0.9 and the HSS does not exceed 0.2. Kühnlein et al. [
16] derive precipitation estimates from MSG SEVIRI using RF and find a POD of 0.5, POFD of 0.15, FAR of 0.5 and HSS of 0.2–0.5 for their classification of precipitating areas in Germany. Mapping rainfall over southern Africa using MSG SEVIRI lead to a validation aggregation of 1 h to a POD of 0.6, a low POFD of 0.18, but a high FAR of 0.8 and a low HSS of 0.18 [
20].
Precipitating clouds were classified using IR from Himawari-8 where an enormous high POD of 0.98 and a high HSS of 0.2–0.8 is found, whereas the FAR does not exceed 0.01 [
22]. Min et al. [
21] estimate summertime precipitation from Himawari-8 and determine a POD of 0.58, a FAR between 0.27–0.41 and a HSS of 0.53. The TiP is especially challenging for satellite based precipitation retrieval techniques. This is due to the high elevation that causes low surface temperatures. These low surface temperatures hardly differ from the temperature of the clouds. This is problematic for the IR based techniques. On the other side, the high elevation and the semi-arid conditions are problematic for PMW sensors, since they often detect the ground signal in these cases which leads to misinterpretations in the retrieval algorithms. The same holds true for snow and ice covered areas which are very common on the TiP. Even if we use the best available data source within the IMERG product by choosing the MW based precipitation information as a reference for our technique, one has to keep in mind that this rainfall information should not be considered as the “truth” because of the described uncertainties.
GPM rainfall estimates are evaluated against gauge networks by Tan et al. [
64] and their evaluation results in a POD of 0.7, FAR of 0.3-0.8 and a HSS of 0.3-0.7, whereas the data were evaluated on a precipitation threshold of 0.2 mm/hr. Everything below 0.2 mm/hr is not considered as precipitation because they state that small precipitation rates cannot be captured by satellites.
Table 8 summarizes the validation metrics of other studies compared to our results.
We use two GEO satellites to retrieve the precipitating area over the TiP. Future enhanced GEO systems from the Elektro-L series with a variety of spectral bands which can be operationally used will enhance the retrieval of precipitation over the TiP. In addition, possible minimal spatial offsets when superimposing the three different satellite products (Elektro-L2, Insat-3D, GPM IMERG) might be reduced. In addition, other studies indicate this issue [
55,
65].
The gauge calibrated MW precipitation combines imager and sounder which were all calibrated to the GPM core instrument (GMI). However, there are differences in the performance of precipitation detection in each sensor and especially in the differentiation between imager and sounder. There are two imagers (GMI, AMSR) and three sounders (ATMS, MHS, SSMIS) available in the V05B IMERG version. A sounder might perform worse than an imager, which then leads to a false classification [
28]. The microwave humidity sounder (MHS) is known to strongly overestimate low rain rates and underestimate moderate intensities [
28,
36]. The MHS and the advanced temperature and moisture sounder (ATMS) are less accurate than the conical-scanning sensors like the GMI [
66]. Since we would lose too much data when removing the sounder, we keep all data.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}