A Model-Based Design System for Terrestrial Laser Scanning Networks in Complex Sites


Abstract
:1. Introduction
- Zero-order design (ZOD)—defining the datum for the network to remove defects in position, orientation, and scale;
- First-order design (FOD)—determining the network configuration including the number of, the location, and the orientation of the instrument stations for data capture;
- Second-order design (SOD)—optimizing the stochastic model for observations, which refers to the selection of measurement equipment and observation procedure;
- Third-order design (TOD)—further improving the existing network by, e.g., enhancing the network with additional measurements.
- The near-optimal solution for the TLS network configuration is provided automatically. This solution takes both the reconstruction quality, completeness, and scanning economy into consideration. The superiority of the solution is realized in two aspects:
- For the scanner placement: A hierarchical pipeline is introduced for viewpoint planning, which speeds up the processing in the design stage. In addition, an improved optimization method, the weighted greedy algorithm (WGA), is proposed to reduce the number of required scans;
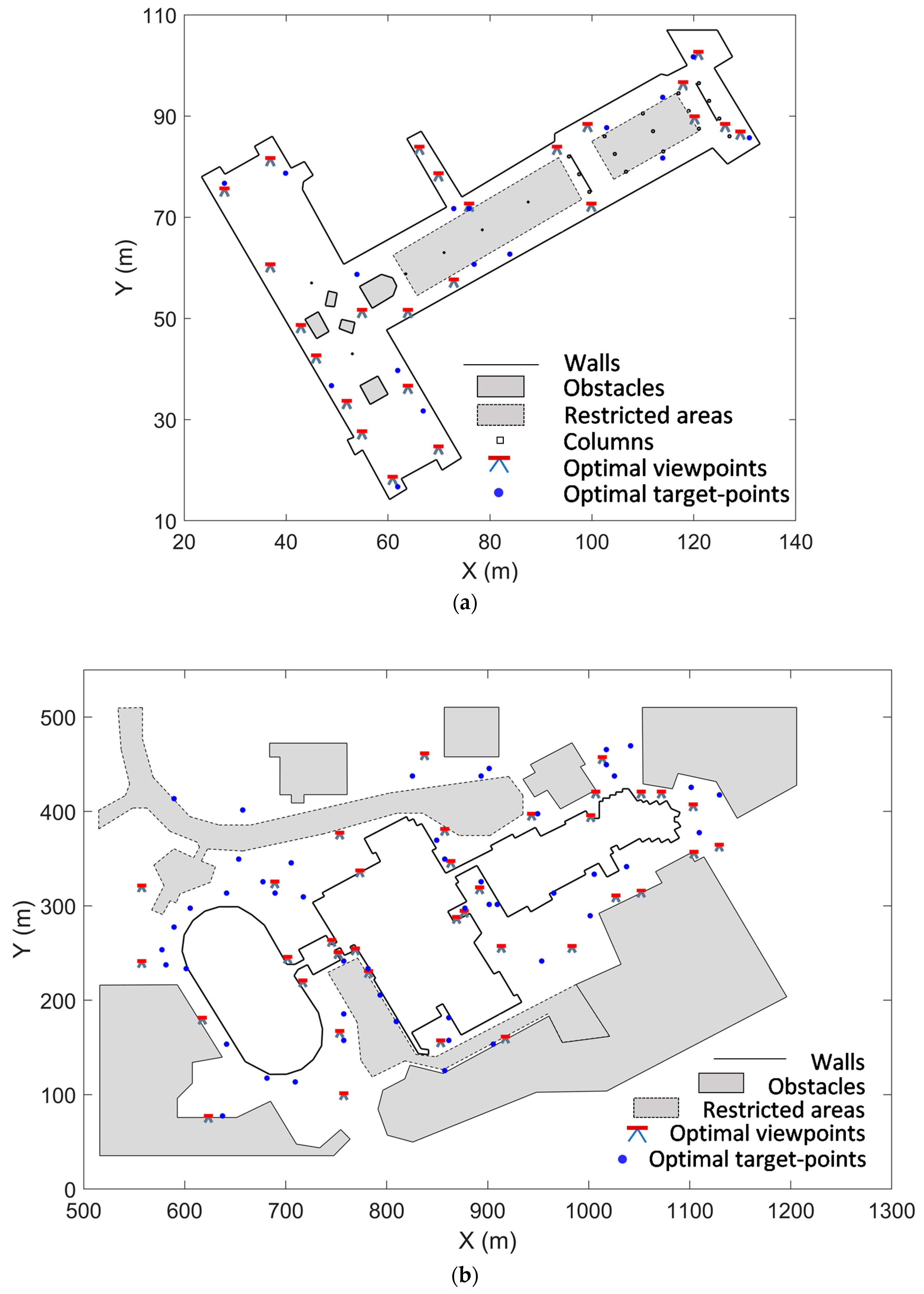
- For the target placement: A random sampling strategy is utilized to provide the target configuration that can maximize the registration precision with a minimum number of targets.
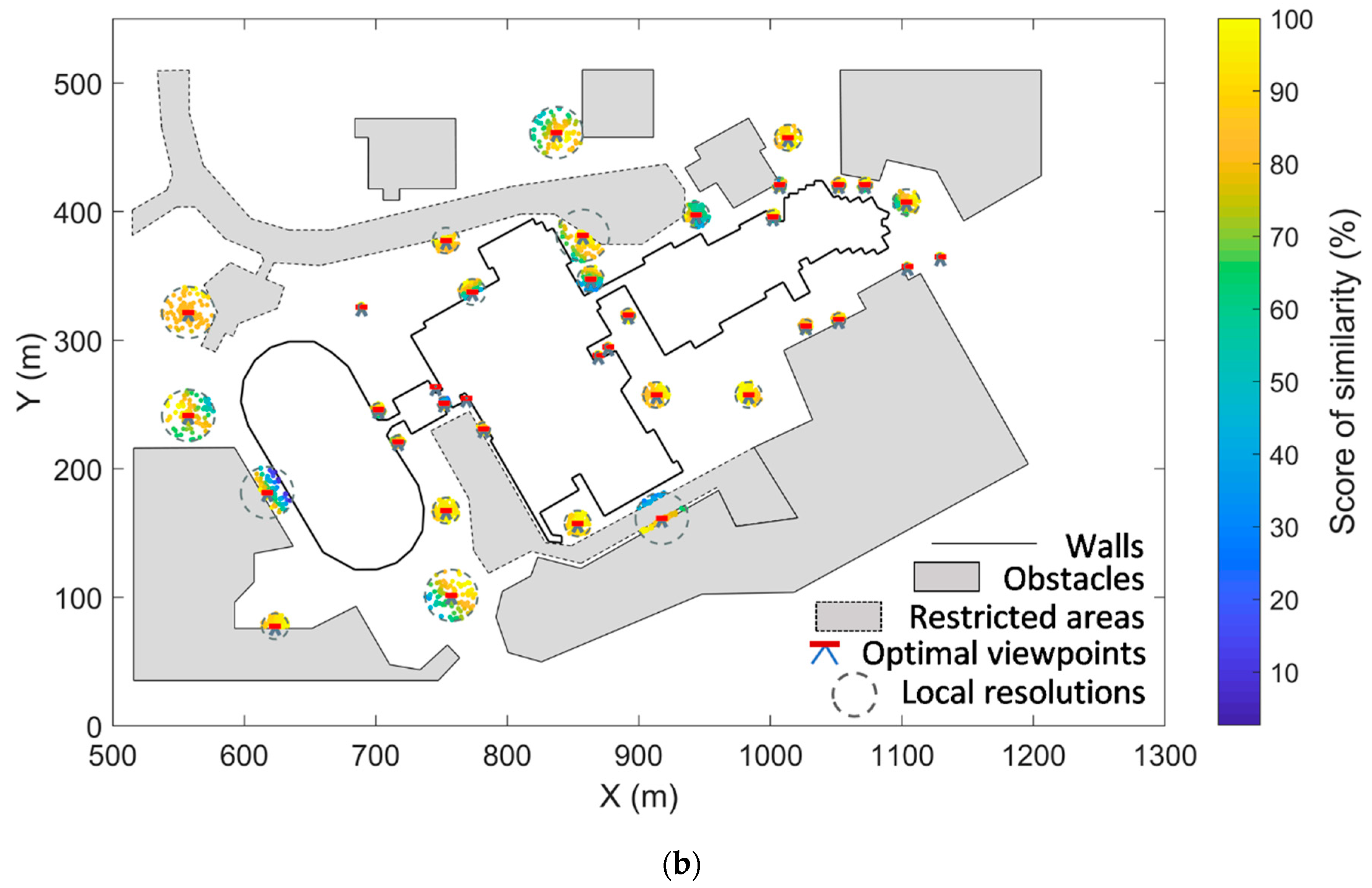
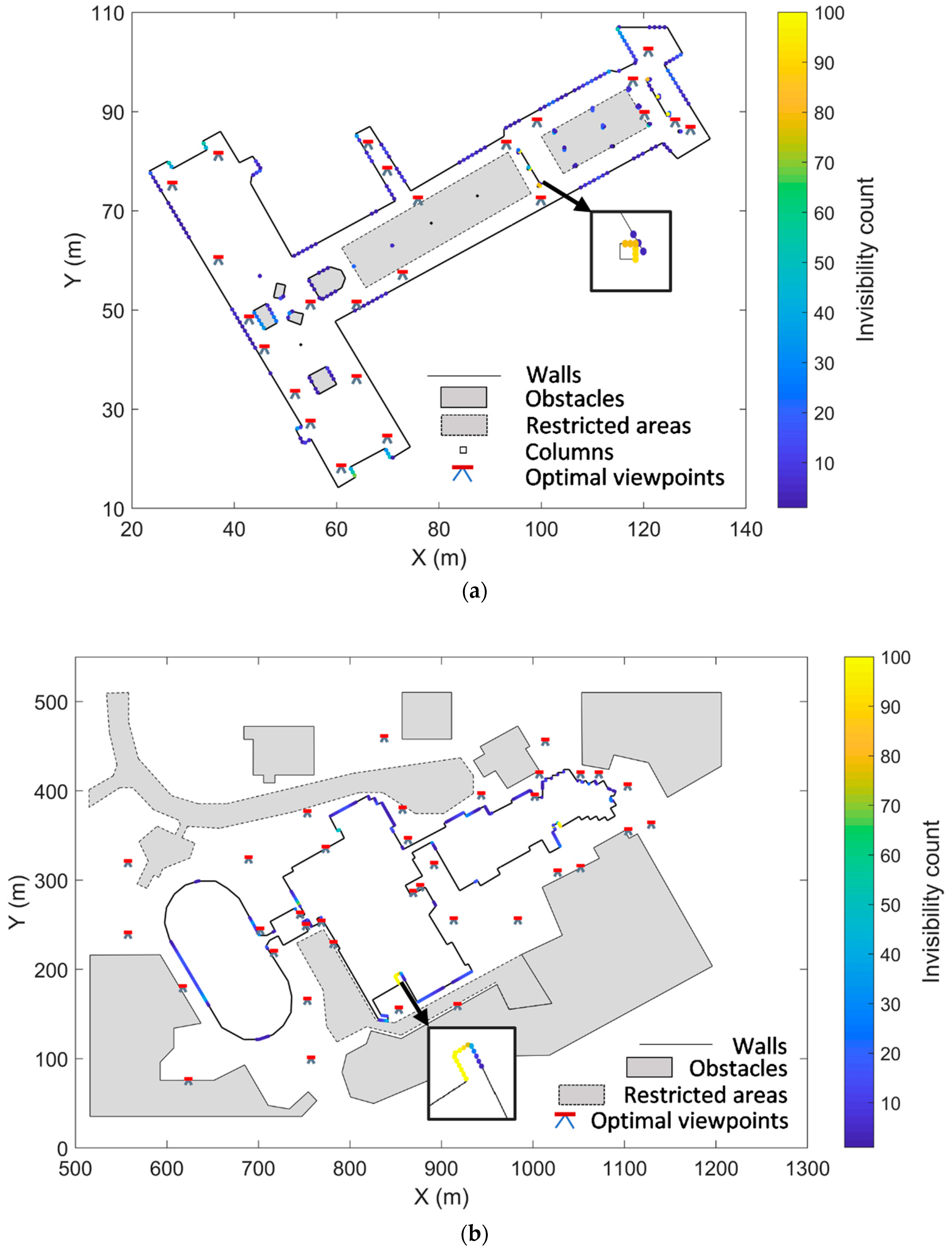
- Weak areas of the network are investigated by introducing a sensitivity test.
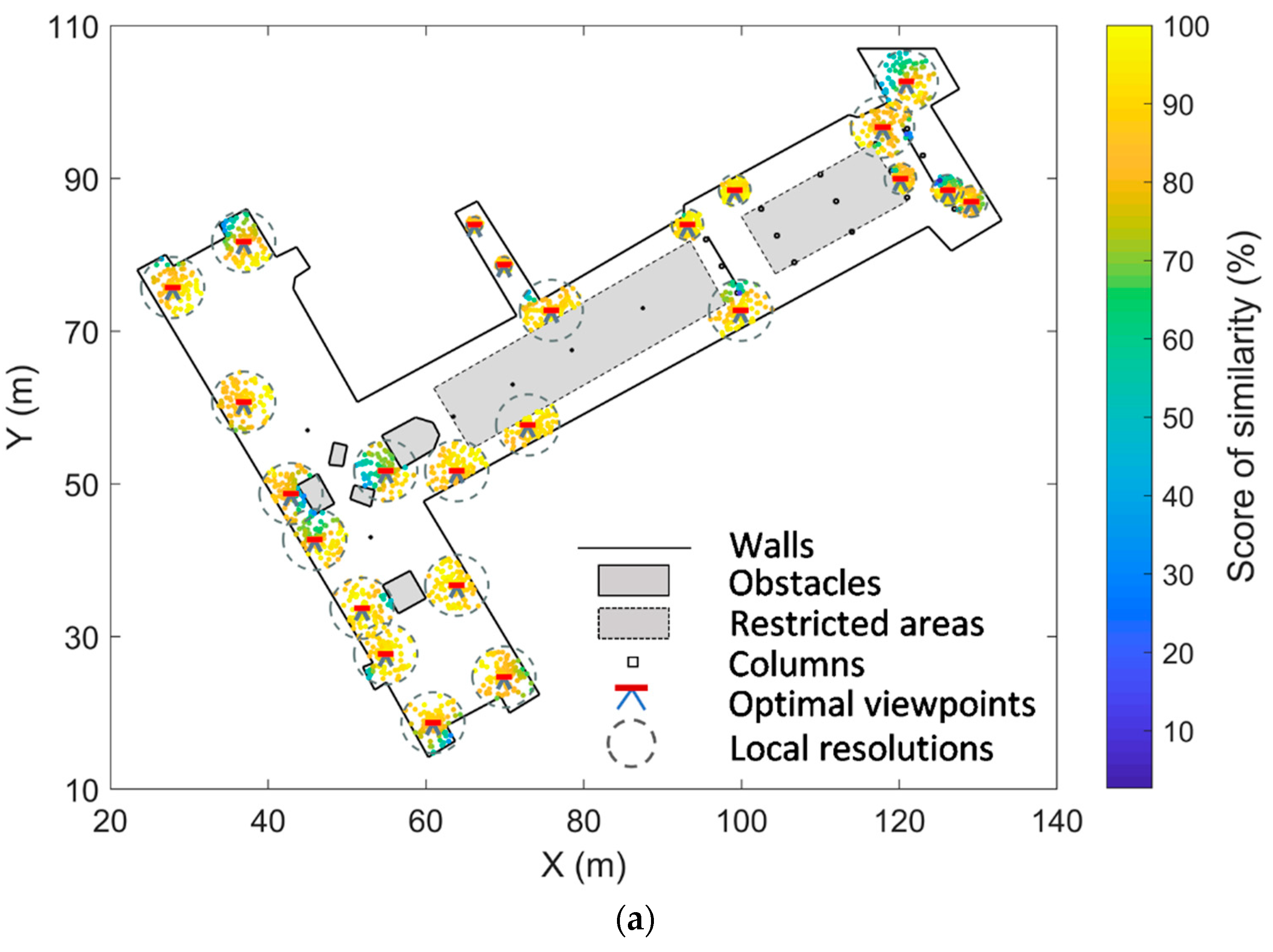
- The quality of the registered point cloud captured with our design is visualized in terms of the semi-major axis of the 95% confidence ellipsoid computed throughout the scanner network.
2. Related Work
2.1. The Role of TLS Observation Quality in the Network Design
2.2. The Role of the Scanner Registration in the Network Configuration
2.3. State-of-Art of TLS Viewpoint Planning Methods
- For the methods without prior model, the optimality of the solution is subject to the bias of the previous scanner placement;
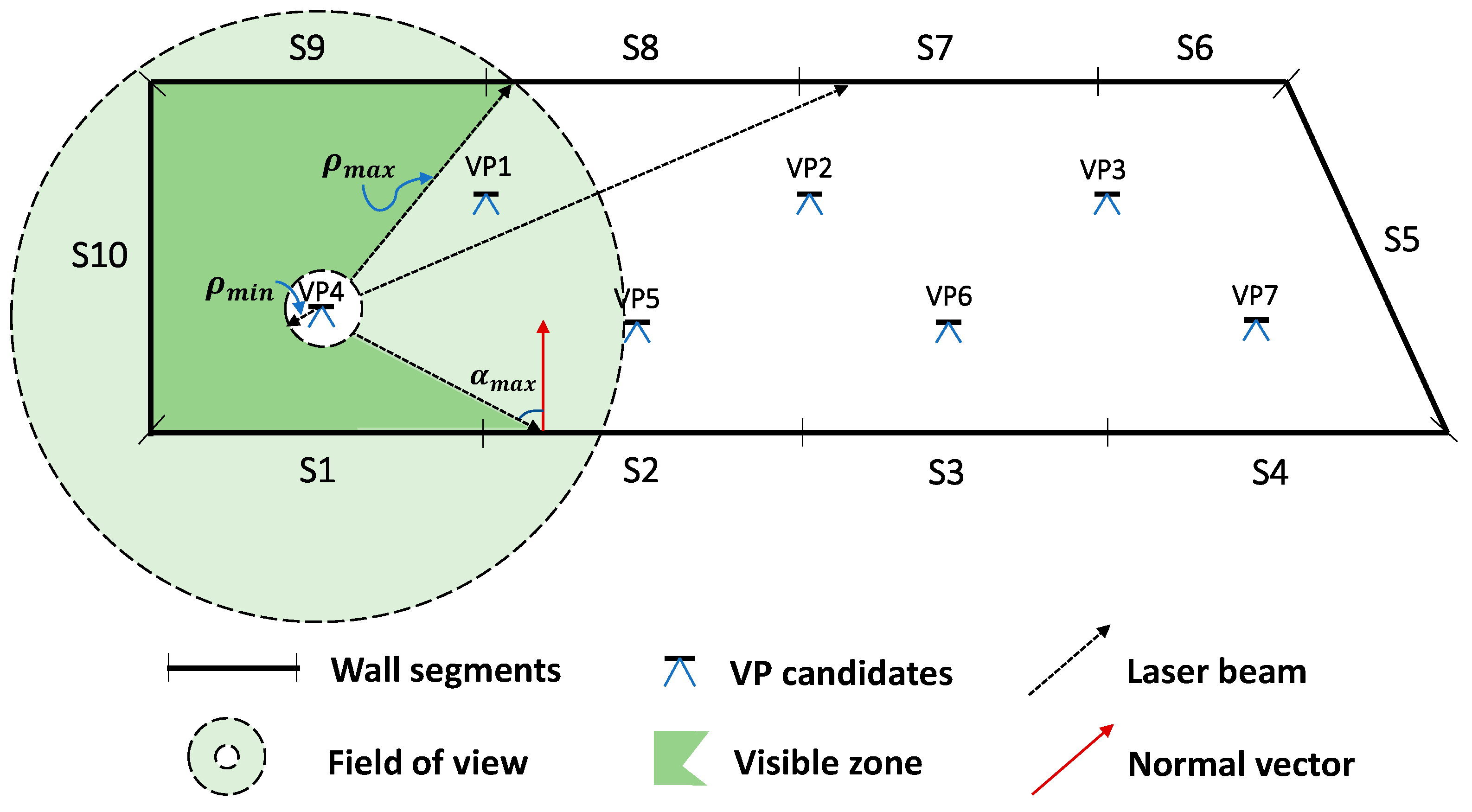
- The visibility analysis between the scanner and the object is based on analysing the entire workspace, which requires extensive computations;
- The research on the planning for the target placement is limited.
3. The Design System for the Scanner Placement
3.1. Optimization Methods
3.1.1. Greedy Algorithm
3.1.2. Weighted Greedy Algorithm
3.2. The Hierarchical Viewpoint Planning Strategy
- Workspace: As described earlier, it is the space in which the instruments can be placed. Here, it is more precisely defined as global workspace and local workspace. The global workspace is the space around/within the scanning object. The local workspace is a specific local area within the global workspace;
- Candidate space: This is the set that contains all the created VP candidates;
- Resolution: If we consider the workspace as an image and the VP candidates as pixels, then the density of the VP candidates represents the resolution of the workspace. The smaller the step length between adjacent candidates is, the higher the resolution of the workspace will be. In the remaining of this paper, the increase of the resolution is realized by decreasing the step length;
- Optimal VPs: They are the VPs selected by the optimization methods, i.e., the GA or the WGA;
- Neighbourhood: A user-defined buffer around an optimal VP. In this research, the buffer is determined as a circle with a radius that is three times the resolution;
- Distinguishable VPs: Optimal VPs that have no other optimal VPs within their neighbourhoods;
- Indistinguishable VPs: Optimal VPs that have one or more other optimal VPs within their neighbourhoods.
| 1: Input: a global workspace |
| 2: Output: a set of optimal VPs |
| 3: Initialization: |
| 4: : a course global resolution |
| 5: : candidate space under |
| 6: : a set of optimal VPs in |
| 7: |
| 8. While VPs in are not all distinguishable |
| 9: : increase the local resolution |
| 10: : update candidate space |
| 11: : find optimal VPs in |
| 12: |
| 13: End |
- Initialization. The process starts from a course global resolution. With a relatively large step length, an initial candidate space with a small number of VP candidates is constructed. After the visibility evaluation, the proposed weighted greedy algorithm finds an initial set of optimal VPs in the initial candidate space;
- Label VPs. The optimal VPs are labelled as distinguishable/indistinguishable VPs based on their distance with other optimal VPs;
- Increase local resolution. After step 2, several groups of indistinguishable VPs that falls within a distance threshold is found. In this paper, the distance threshold is set as three times the current step length. A local workspace is defined for each group and the local resolution is increased by decreasing the current step length to half of it to obtain a partially denser candidate space. The local workspace is defined by extending the boundaries that surrounds the group of indistinguishable VPs with the current step length;
- Update optimal VPs. The weighted greedy algorithm provides new set of optimal VPs in the new candidate space;
- Stop criterion. Repeat steps 2 to 4 until all the optimal VPs are labelled as distinguishable VPs.
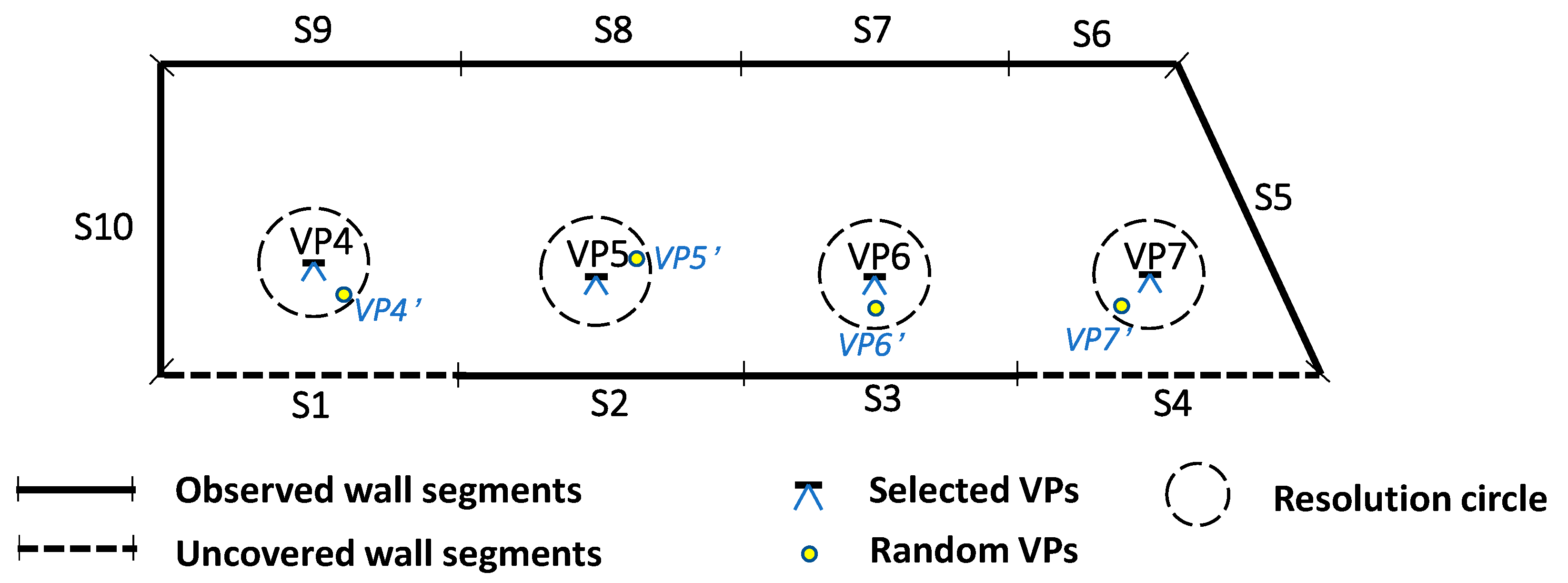
- Minimal VPs. The reduced number of optimal VPs is realized by two improvements. One is by reordering the priorities of VP candidates with the proposed weighted greedy algorithm. The other is by relocating indistinguishable VPs to more precise locations;
- High computational efficiency. Computational savings are realized from the hierarchical strategy that increases resolutions only at local workspaces of interest. It saves time by not evaluating a large number of unnecessary candidates, which is the case when the candidate space is constructed by the uniform resolution.
4. The Design System for the Target Placement
4.1. Evaluation Criterion in Target Arrangements
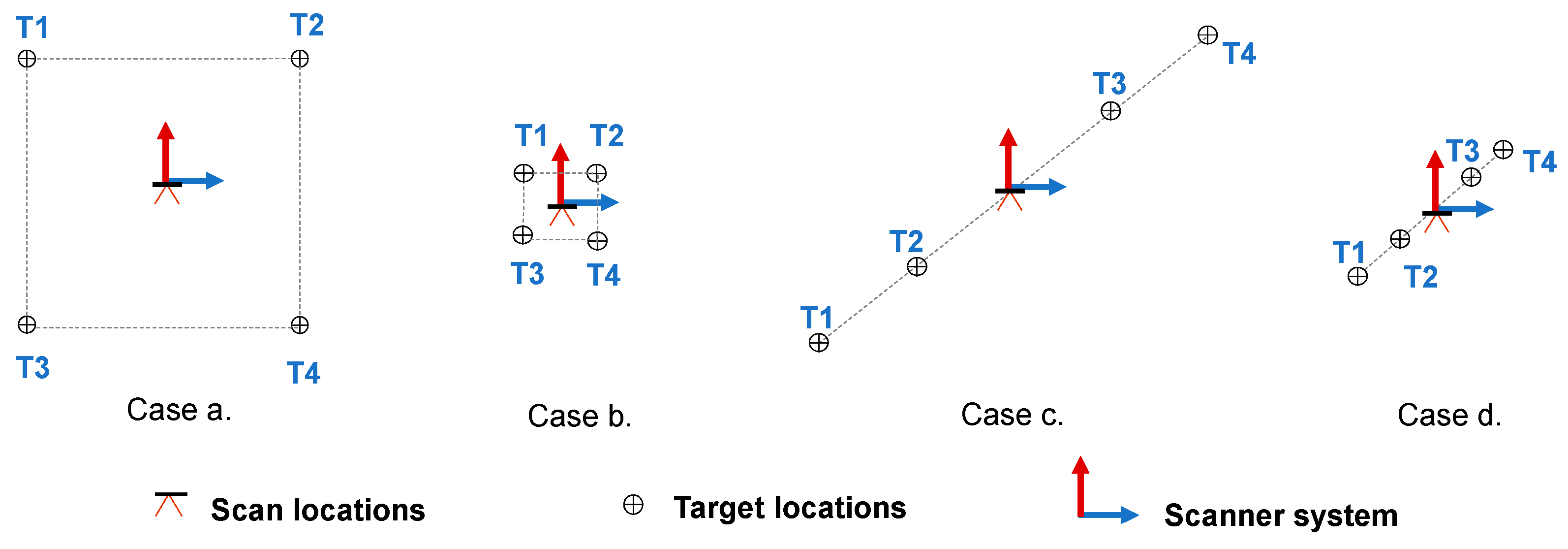
- Six coordinates from three targets observed from each scan, though the choice of which six coordinates is arbitrary, are the minimum requirements to solve for the registration parameters. This assumes that the scanner is not levelled. For the consideration of network reliability, at least four targets should be observed from each scan to provide redundancy;
- To maximize registration precision: 1) Targets should be distributed throughout the network volume, as far apart as possible; 2) targets that are collinearly or near-collinearly distributed are prohibited to avoid a singular system of equations.
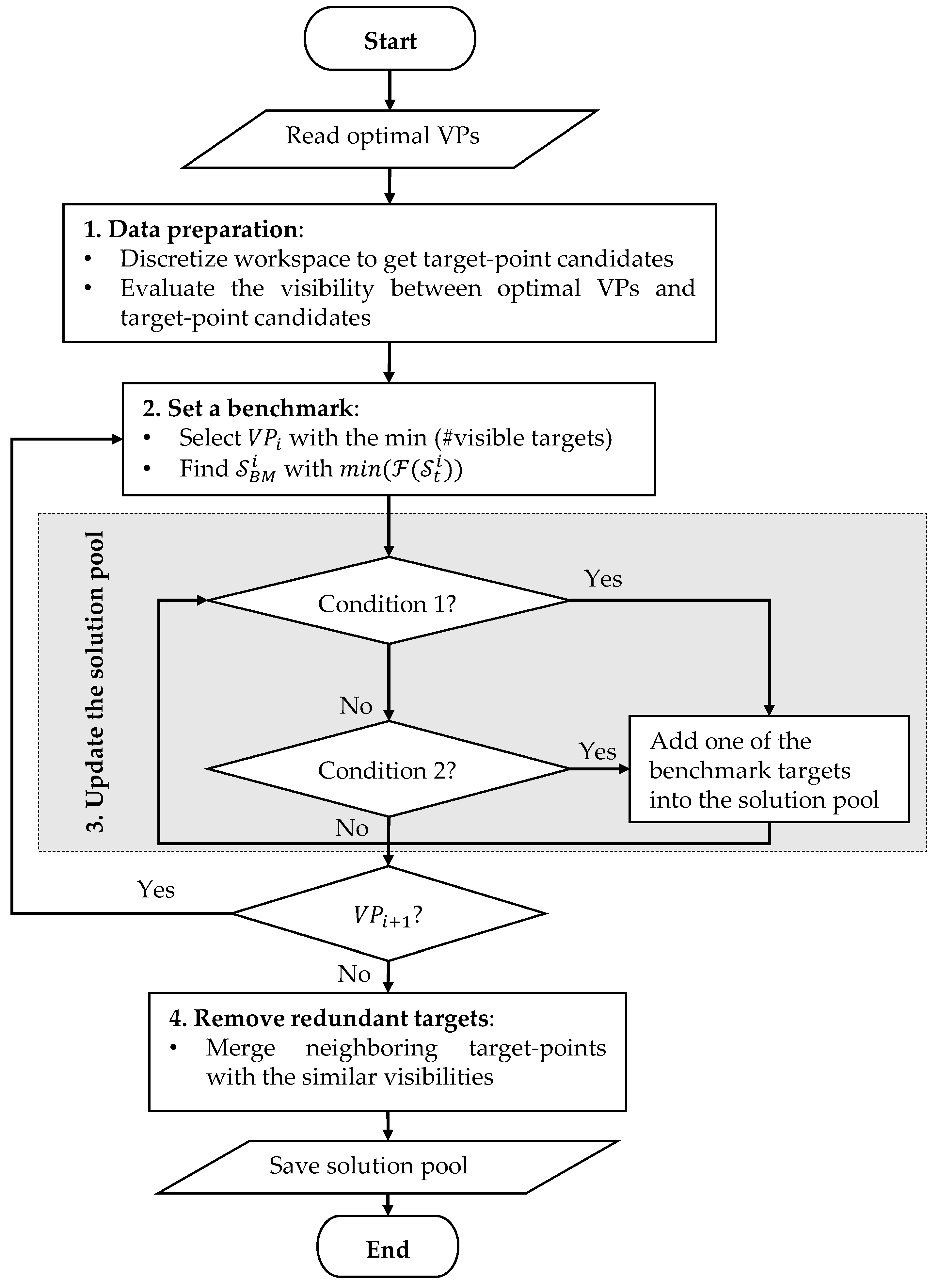
4.2. Procedure of the Target Placement Planning
- High quality. This reflects in both the registration precision and the redundancy of the network. The registration precision is preserved by determining the target-point layout under the guide of the benchmark geometry; and the redundancy is satisfied when at least four targets are observed from each viewpoint location;
- Minimal targets. With no prejudice to the network redundancy, the number of the selected target-points is minimized in two ways. One is by accepting the existing target-points in the solution pool whose geometry is competitive with the benchmark geometry; the other one is to “trim” the target-points that are inferior to the other target-points in the final step.
5. Quality Assessment
5.1. Sensitivity Test of the Scanner Placement
5.2. Precision Measure of the Scanning Object
6. Experiments and Discussions
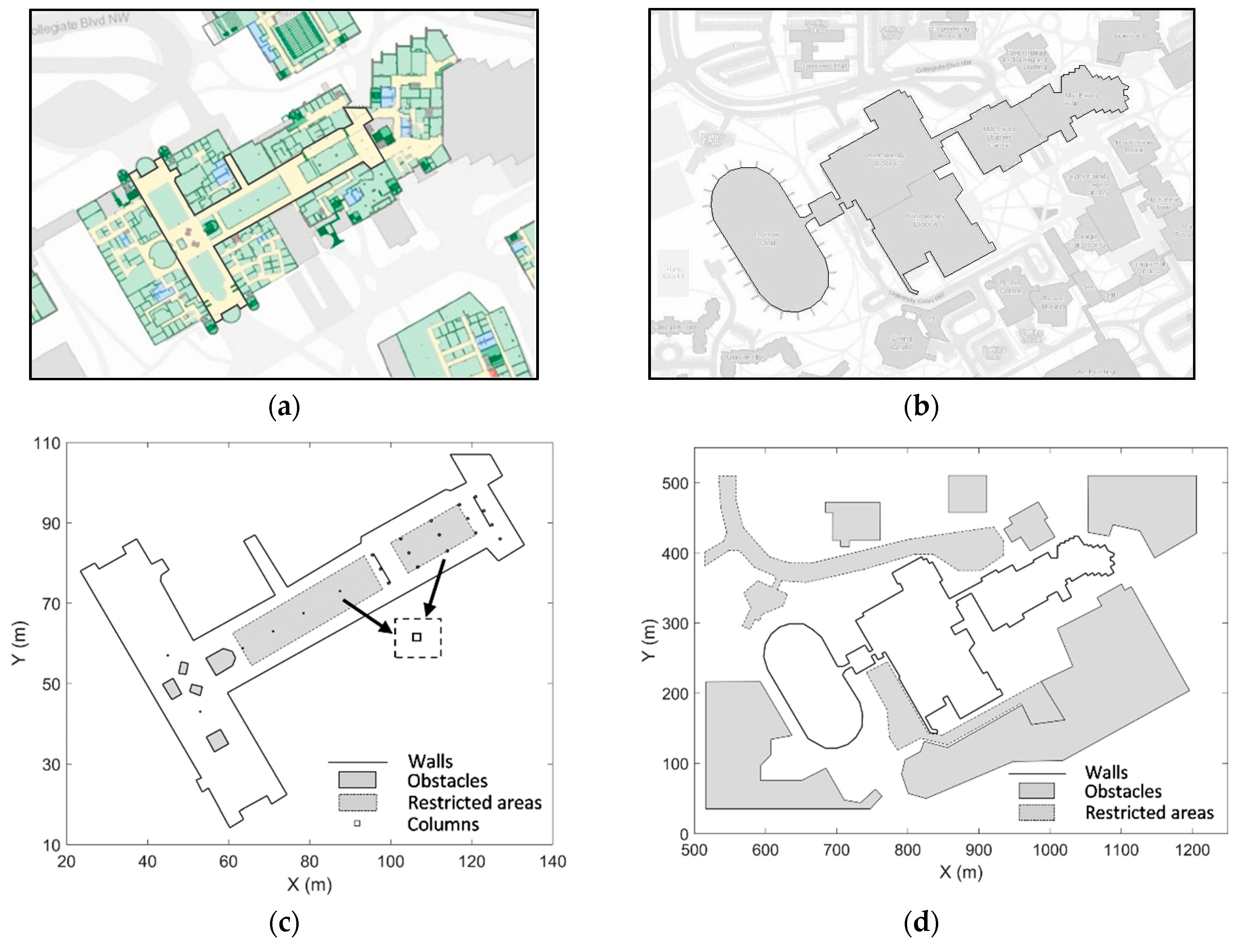
6.1. Experimental Environments
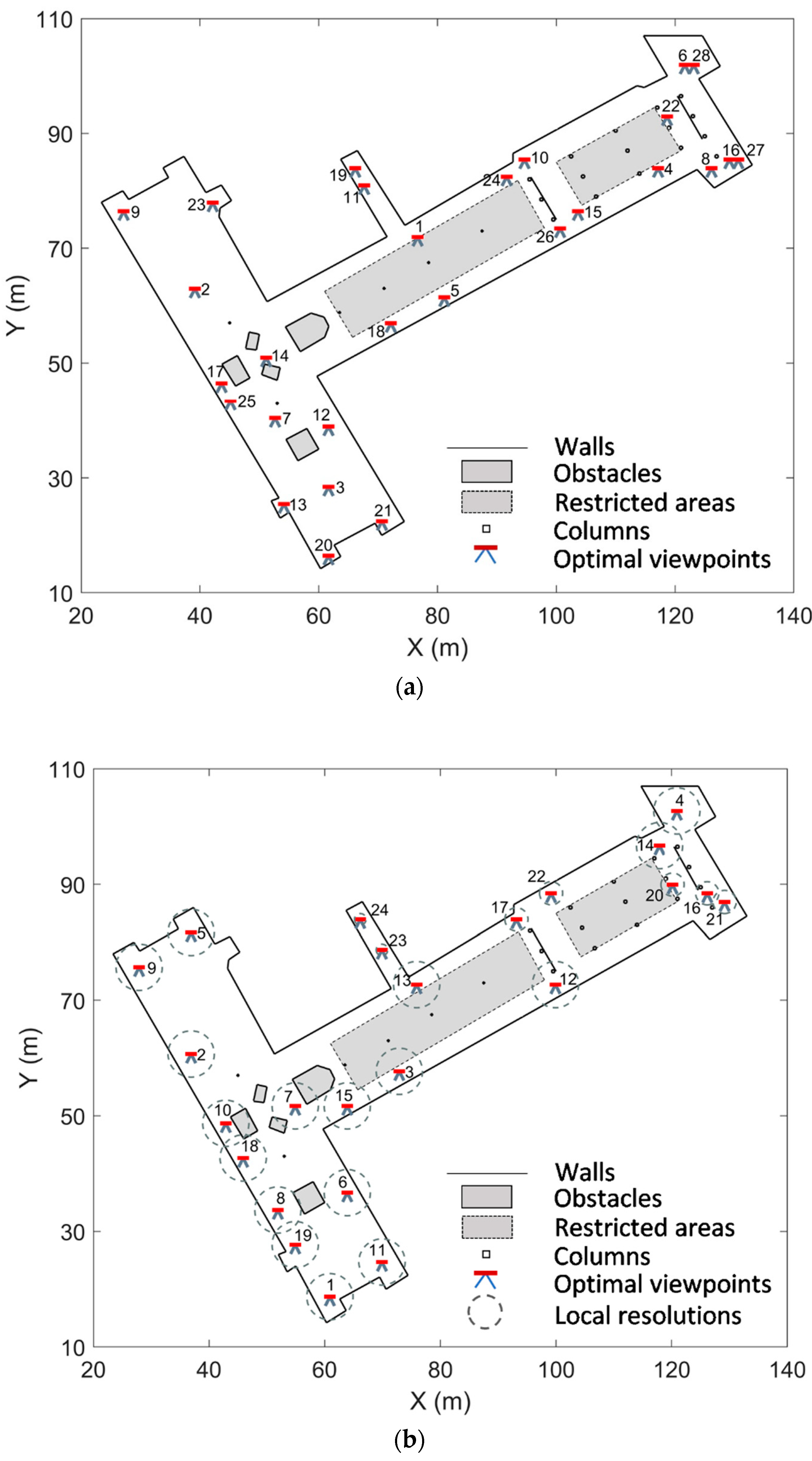
6.2. Designs for the Scanner Placement
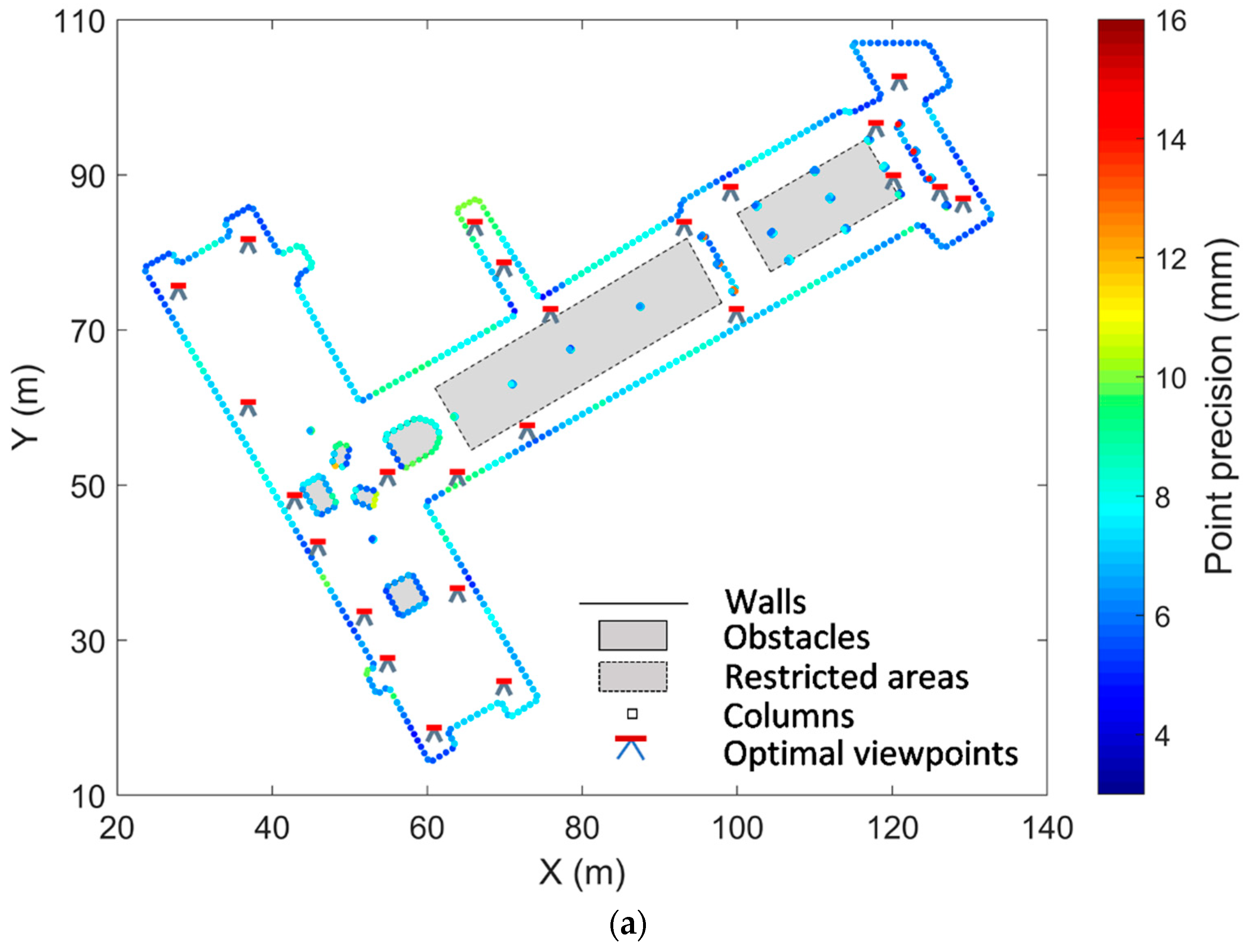
6.2.1. MacEwan Student Centre
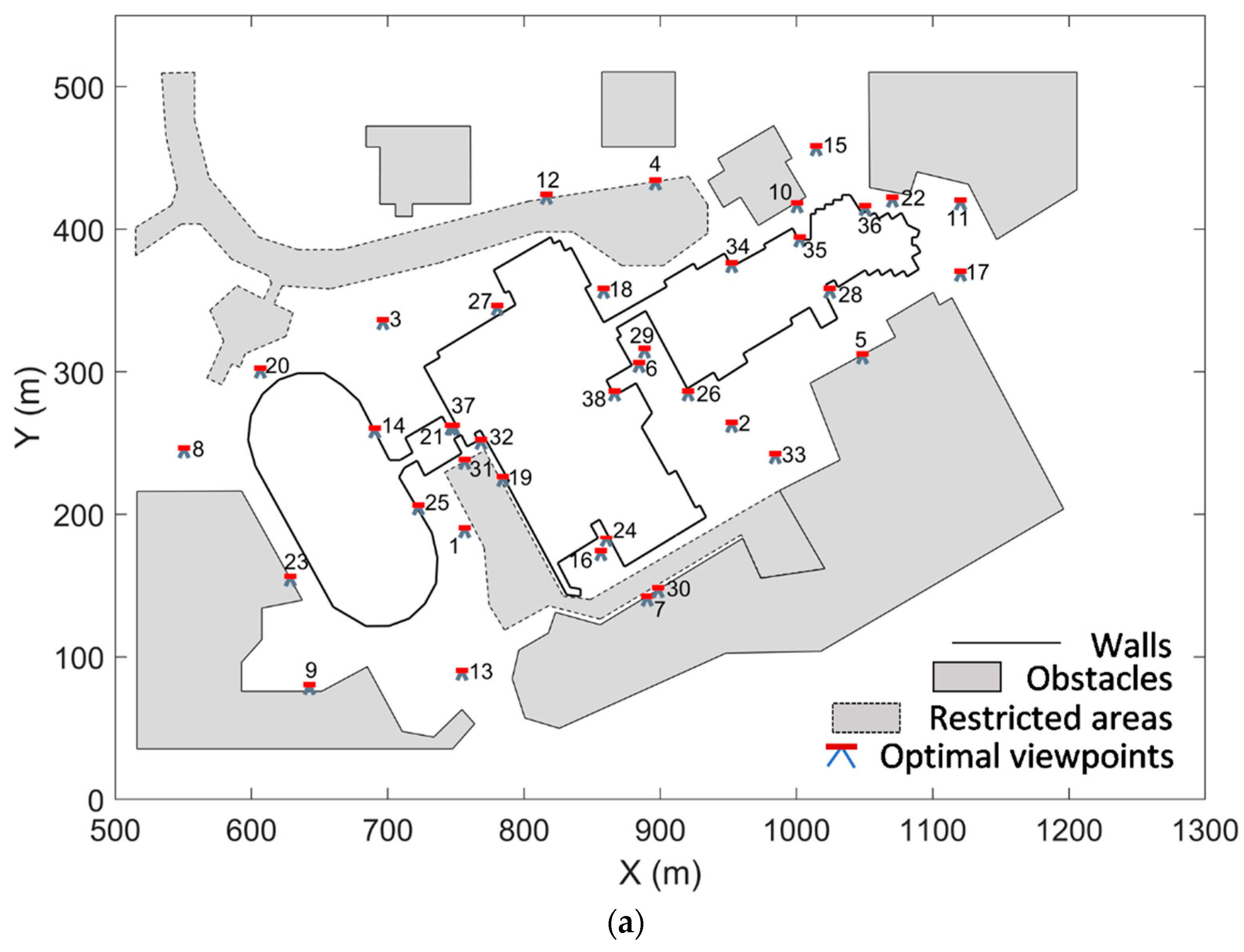
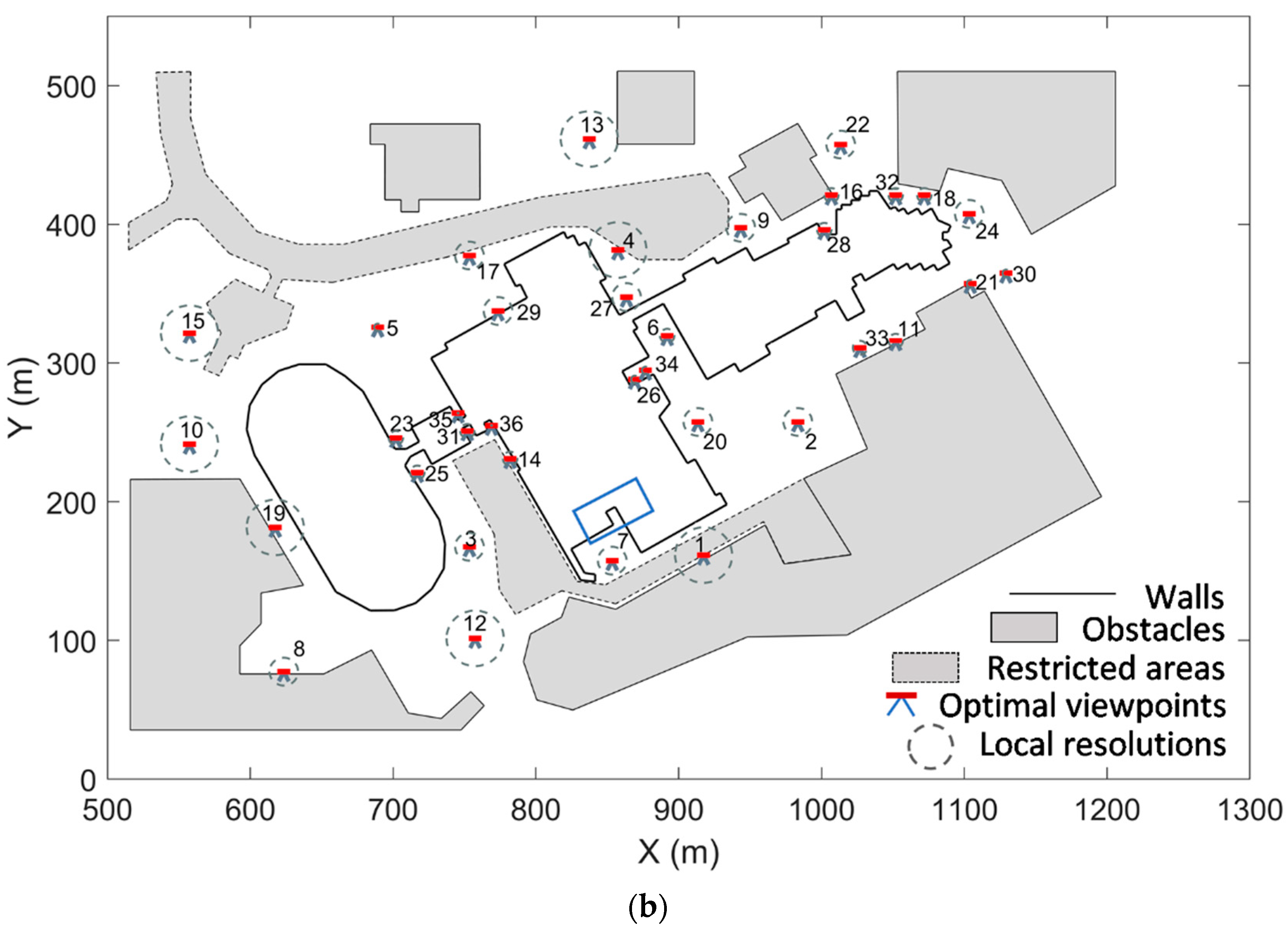
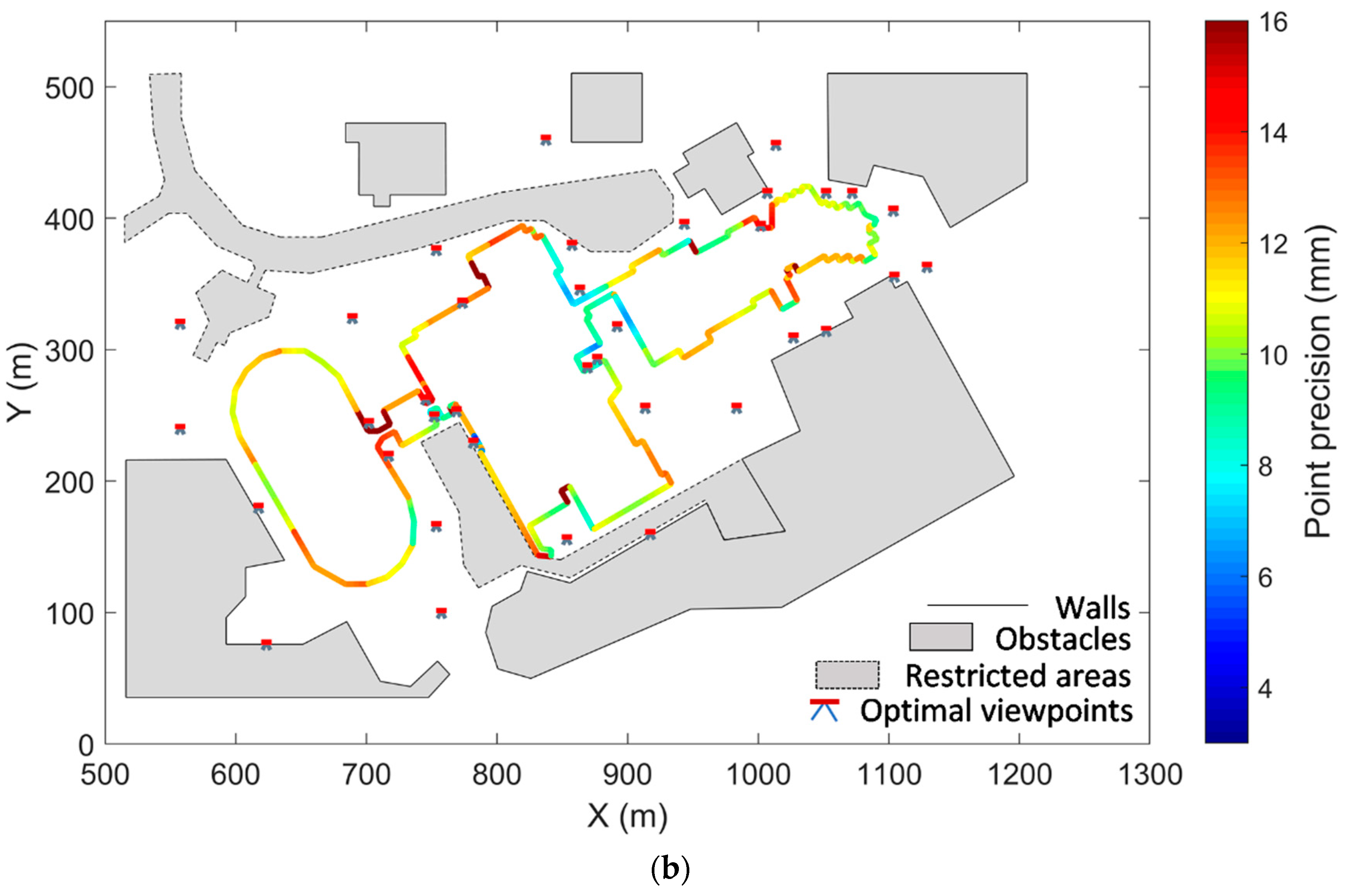
6.2.2. Oval-MacEwan Entertainment Complex
6.3. Designs for the Target Placement
6.4. The Sensitivity Tests
6.5. Point Cloud Precision
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Oskouie, P.; Becerik-Gerber, B.; Soibelman, L. Automated measurement of highway retaining wall displacements using terrestrial laser scanners. Autom. Constr. 2016, 65, 86–101. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic Recognition of Common Structural Elements from Point Clouds for Automated Progress Monitoring and Dimensional Quality Control in Reinforced Concrete Construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2016, 49, 99–116. [Google Scholar] [CrossRef]
- Hullo, J.F. Fine registration of kilo-station networks—A modern procedure for terrestrial laser scanning data sets. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech, 12–19 July 2016. [Google Scholar]
- Santagati, C.; Inzerillo, L.; Di Paola, F. Image-based modeling techniques for architectural heritage 3D digitalization: Limits and potentialities. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Strasbourg, France, 2–6 September 2013. [Google Scholar]
- Fanti, R.; Gigli, G.; Lombardi, L.; Tapete, D.; Canuti, P. Terrestrial laser scanning for rockfall stability analysis in the cultural heritage site of Pitigliano (Italy). Landslides 2013, 10, 409–420. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial laser scanning of rock slope instabilities. Earth Surf. Processes Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2012, 4, 1–20. [Google Scholar] [CrossRef]
- Leica. 2017. Available online: http://hds.leica-geosystems.com/en/HDS-Laser-Scanners-SW_5570.htm (accessed on 19 December 2017).
- Scott, W.R.; Roth, G.; Rivest, J.-F. Viewpoint planning for automated three-dimensional object reconstruction and inspection. ACM Comput. Surv. 2003, 35, 64–96. [Google Scholar] [CrossRef]
- Grafarend, E. Optimization of geodetic networks. Bull. Geod. Sci. Affin. 1974, 33, 351–406. [Google Scholar] [CrossRef]
- Kuang, S. Optimization and Design of Deformation Monitoring Schemes. Ph.D. Thesis, University of New Brunswick, Fredericton, NB, Canada, 1991. [Google Scholar]
- Kuang, S. Geodetic Network Analysis and Optimal Design: Concepts and Applications, 1st ed.; Ann Arbor Press: London, UK, 1996. [Google Scholar]
- Schmitt, G. Optimization of Geodetic Networks. Rev. Geophys. 1982, 20, 877–884. [Google Scholar] [CrossRef]
- Fraser, C.S. Optimization of precision in close-range photogrammetry. Photogramm. Eng. Remote Sens. 1982, 48, 561–570. [Google Scholar]
- Fraser, C.S. Network design considerations for non-topographic photogrammetry. Photogramm. Eng. Remote Sens. 1984, 50, 1115–1126. [Google Scholar]
- Lichti, D.D. Error modelling, calibration and analysis of an AM-CW terrestrial laser scanner system. ISPRS J. Photogramm. Remote Sens. 2007, 61, 307–324. [Google Scholar] [CrossRef]
- Lichti, D.D. Terrestrial laser scanner self-calibration: Correlation sources and their mitigation. ISPRS J. Photogramm. Remote Sens 2010, 65, 93–102. [Google Scholar] [CrossRef]
- Marshall, G.F.; Stutz, G.E. Handbook of Optical and Laser Scanning, 1st ed.; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Boehler, W.; Vicent, M.B.; Marbs, A. Investigating laser scanner accuracy. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 30 September 2003. [Google Scholar]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Hejbudzka, K.; Lindenbergh, R.C.; Soudarissanane, S.S.; Humme, A. Influence of atmospheric conditions on the range distance and number of returned points in Leica Scanstation 2 point clouds. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Newcastle Upon Tyne, UK, 21–24 June 2010. [Google Scholar]
- Pfeifer, N.; Dorninger, P.; Haring, A.; Fan, H. Investigating terrestrial laser scanning intensity data: Quality and functional relations. In Proceedings of the 8th Conference on O3D, Zurich, Switzerland, 9–12 July 2007. [Google Scholar]
- Che, E.; Olsen, M.J. Multi-scan segmentation of terrestrial laser scanning data based on normal variation analysis. ISPRS J. Photogramm. Remote Sens. 2018, 143, 233–248. [Google Scholar] [CrossRef]
- Lichti, D.D.; Glennie, C.L.; Jahraus, A.; Hartzell, P. New approach for low-cost TLS target measurement. J. Surv. Eng. 2019, 145, 04019008. [Google Scholar] [CrossRef]
- Ye, C.; Borenstein, J. Characterization of a 2-D laser scanner for mobile robot obstacle negotiation. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002. [Google Scholar]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Krooks, A.; Kaasalainen, S.; Hakala, T.; Nevalainen, O. Correction of intensity incidence angle effect in terrestrial laser scanning. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 11–13 November 2013. [Google Scholar]
- Wujanz, D.; Neitzel, F. Model based viewpoint planning for terrestrial laser scanning from an economic perspective. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech, 12–19 July 2016. [Google Scholar]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 30 April 1992. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Hullo, J.F.; Thibault, G.; Boucheny, C.; Dory, F.; Mas, A. Multi-sensor as-built models of complex industrial architectures. Remote Sens. 2015, 7, 16339–16362. [Google Scholar] [CrossRef]
- Gordon, S.J.; Lichti, D.D. Terrestrial laser scanners with a narrow field of view: The effect on 3D resection solutions. Surv. Rev. 2004, 37, 448–468. [Google Scholar] [CrossRef]
- Low, K.L. Viewpoint Planning for Range Acquisition of Indoor Environments. Ph.D. Thesis, University of North Carolina at Chapel Hill, Chapel Hill, NC, USA, 2006. [Google Scholar]
- Biswas, H.; Bosché, F.; Sun, M. Planning for scanning using building information models: A novel approach with occlusion handling. In Proceedings of the 32nd International Symposium on Automation and Robotics in Construction and Mining, Oulu, Finland, 15–18 June 2015. [Google Scholar]
- Blaer, P.; Allen, P. Data acquisition and viewpoint planning for 3-D modeling tasks. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Kawashima, K.; Yamanishi, S.; Kanai, S.; Date, H. Finding the next-best scanner position for as-built modelling of piping systems. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva Del Garda, Italy, 23–25 June 2014. [Google Scholar]
- Pito, R. A Sensor-Based Solution to the “Next Best View” Problem. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996. [Google Scholar]
- Pito, R. A solution to the Next Best View problem for automated surface acquisition. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 1016–1030. [Google Scholar] [CrossRef]
- Scott, W.R. Model-based viewpoint planning. Mach. Vis. Appl. 2009, 20, 47–69. [Google Scholar] [CrossRef]
- Ahn, J.; Wohn, K. Interactive scan planning for heritage recording. Multimed. Tools Appl. 2015, 75, 3655–3675. [Google Scholar] [CrossRef]
- Jia, F.; Lichti, D.D. A comparison of Simulated Annealing, Genetic Algorithm and Particle Swarm Optimization in optimal First-Order Design of indoor TLS networks. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, Wuhan, China, 18–22 September 2017. [Google Scholar]
- Jia, F.; Lichti, D.D. An efficient, hierarchical viewpoint planning strategy for terrestrial laser scanner networks. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva Del Garda, Italy, 4–7 June 2018. [Google Scholar]
- Mozaffar, M.; Varshosaz, M. Optimal placement of a terrestrial laser scanner with an emphasis on reducing occlusions. Photogramm. Rec. 2016, 31, 374–393. [Google Scholar] [CrossRef]
- Soudarissanane, S. The Geometry of Terrestrial Laser Scanning: Identification of Errors, Modeling and Mitigation of Scanning Geometry. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- O’Rourke, J. Art Gallery Theorems and Algorithms; Oxford University Press: Oxford, UK, 1987. [Google Scholar]
- Tozoni, D.C.; de Rezende, P.J.; de Souza, C.C. A practical iterative algorithm for the art gallery problem using integer linear programming. ACM Trans. Math. Softw. 2016, 43, 1–27. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Score | |
| VP1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 3 |
| VP2 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 |
| VP3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 3 |
| VP4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 3 |
| VP5 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 3 |
| VP6 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 3 |
| VP7 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 3 |
| (a) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Score | |
| VP1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 3 |
| VP2 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| VP3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 3 |
| VP4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| VP5 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| VP6 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 3 |
| VP7 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 3 |
| (b) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Score | |
| VP1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| VP2 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| VP3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 3 |
| VP4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| VP5 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| VP6 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 1 |
| VP7 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 |
| (c) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | ||
| VP1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | |
| VP2 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| VP3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | |
| VP4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | |
| VP5 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | |
| VP6 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | |
| VP7 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | |
| Visibility count | 2 | 3 | 3 | 2 | 3 | 1 | 1 | 1 | 1 | 3 | |
| (a) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Weight | |
| VP1 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1/3 | 7/6 |
| VP2 | 0 | 1/3 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4/6 |
| VP3 | 0 | 0 | 1/3 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 7/6 |
| VP4 | 1/2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1/3 | 11/6 |
| VP5 | 0 | 1/3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1/3 | 10/6 |
| VP6 | 0 | 0 | 1/3 | 0 | 1/3 | 0 | 1 | 0 | 0 | 0 | 10/6 |
| VP7 | 0 | 0 | 0 | 1/2 | 1/3 | 1 | 0 | 0 | 0 | 0 | 11/6 |
| (b) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Weight | |
| VP1 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1/3 | 2/6 |
| VP2 | 0 | 1/3 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4/6 |
| VP3 | 0 | 0 | 1/3 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 7/6 |
| VP4 | 1/2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1/3 | 11/6 |
| VP5 | 0 | 1/3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1/3 | 8/6 |
| VP6 | 0 | 0 | 1/3 | 0 | 1/3 | 0 | 1 | 0 | 0 | 0 | 10/6 |
| VP7 | 0 | 0 | 0 | 1/2 | 1/3 | 1 | 0 | 0 | 0 | 0 | 11/6 |
| (c) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Weight | |
| VP1 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1/3 | 2/6 |
| VP2 | 0 | 1/3 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4/6 |
| VP3 | 0 | 0 | 1/3 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 2/6 |
| VP4 | 1/2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1/3 | 0 |
| VP5 | 0 | 1/3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1/3 | 8/6 |
| VP6 | 0 | 0 | 1/3 | 0 | 1/3 | 0 | 1 | 0 | 0 | 0 | 8/6 |
| VP7 | 0 | 0 | 0 | 1/2 | 1/3 | 1 | 0 | 0 | 0 | 0 | 11/6 |
| (d) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Weight | |
| VP1 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1/3 | 0 |
| VP2 | 0 | 1/3 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2/6 |
| VP3 | 0 | 0 | 1/3 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 2/6 |
| VP4 | 1/2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1/3 | 0 |
| VP5 | 0 | 1/3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1/3 | 8/6 |
| VP6 | 0 | 0 | 1/3 | 0 | 1/3 | 0 | 1 | 0 | 0 | 0 | 8/6 |
| VP7 | 0 | 0 | 0 | 1/2 | 1/3 | 1 | 0 | 0 | 0 | 0 | 0 |
| (e) | |||||||||||
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Visibility Weight | |
| VP1 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1/3 | 0 |
| VP2 | 0 | 1/3 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| VP3 | 0 | 0 | 1/3 | 1/2 | 1/3 | 0 | 0 | 0 | 0 | 0 | 0 |
| VP4 | 1/2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1/3 | 0 |
| VP5 | 0 | 1/3 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1/3 | 0 |
| VP6 | 0 | 0 | 1/3 | 0 | 1/3 | 0 | 1 | 0 | 0 | 0 | 8/6 |
| VP7 | 0 | 0 | 0 | 1/2 | 1/3 | 1 | 0 | 0 | 0 | 0 | 0 |
| (f) | |||||||||||
| Pipeline 1: Previous Methodology | Pipeline 2: Proposed Methodology | |
|---|---|---|
| Candidate space construction | Uniform resolution | Hierarchical resolutions |
| Optimization method | GA | WGA |
| MacEwan Student Centre | Oval-MacEwan Complex | |
|---|---|---|
| Environment | Indoor | Outdoor |
| Dimensions | 120 m × 90 m | 700 m × 500 m |
| # Walls | 93 | 259 |
| Unit length | 1 m | 2 m |
| # Wall segments | 630 | 1182 |
| MacEwan Student Centre | Oval-MacEwan Complex | |||
|---|---|---|---|---|
| Pipeline 1 | Pipeline 2 | Pipeline 1 | Pipeline 2 | |
| Resolution | 1 m | 1 m (4 m) | 2 m | 0.035 m (20 m) |
| # VP candidates | 855 | 167 (122) | 25,268 | 1873 (1317) |
| # Selected VPs | 28 | 24 | 38 | 36 |
| Program runtime | ~1.3 h | ~0.25 h | ~49 h | ~3.9 h |
| Coverage rate | 100% | 100% | 100% | 99% |
| Observations | (mm) | (″) | (″) | ||||||||
| ±1 | ±30 | ±30 | |||||||||
| Additional parameters | (mm) | (″) | (″) | (″) | |||||||
| ±0.1 | ±10 | ±10 | ±10 | ||||||||
| Registration parameters | (°) | (°) | (°) | (mm) | (mm) | (mm) | |||||
| ±0.03 | ±0.03 | ±0.01 | ±6.9 | ±4.6 | ±7.9 | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, F.; Lichti, D.D. A Model-Based Design System for Terrestrial Laser Scanning Networks in Complex Sites. Remote Sens. 2019, 11, 1749. https://doi.org/10.3390/rs11151749
Jia F, Lichti DD. A Model-Based Design System for Terrestrial Laser Scanning Networks in Complex Sites. Remote Sensing. 2019; 11(15):1749. https://doi.org/10.3390/rs11151749
Chicago/Turabian StyleJia, Fengman, and Derek D. Lichti. 2019. "A Model-Based Design System for Terrestrial Laser Scanning Networks in Complex Sites" Remote Sensing 11, no. 15: 1749. https://doi.org/10.3390/rs11151749
APA StyleJia, F., & Lichti, D. D. (2019). A Model-Based Design System for Terrestrial Laser Scanning Networks in Complex Sites. Remote Sensing, 11(15), 1749. https://doi.org/10.3390/rs11151749