1. Introduction
With the implementation of the three-stage development plan of the BeiDou Navigation Satellite System (BDS), China started to provide local and global service at the end year of 2012 and 2018, respectively. Three types of constellations were employed by BDS, including GeoSynchronous Orbit (GEO), Inclined GeoSynchronous Orbit (IGSO) and Medium Earth Orbit (MEO). Three frequencies of signals were propagated by the second generation of BDS Satellites (BD2), which were named as B1I, B2I and B3I. Later, according to the publication of Interface Control Document (ICD) [
1,
2,
3,
4] for the third generation of BDS satellites (BD3), four frequencies navigation signals were broadcasted, including the legacy signals B1I (1561.098 MHz) and B3I (1268.52 MHz) for a transition from BD2 to BD3, and two new frequencies, B1C (1575.42 MHz) and B2a (1176.45 MHz). In fact, the two new-added open signals’ frequencies are equal to GPS L1/L5, Galileo E1/E5a or QZSS L1/L5. In general, multi-system compatibility and interoperability can be achieved by making full use of the overlap signal frequencies of GPS, Galileo, BDS and QZSS. Besides, the BD2 satellite bus is equipped with four rubidium atomic clocks, in which two are from the Spectra Time company and the others are manufactured in China, but the improved rubidium atomic frequency standard (RAFS) and the Passive Hydrogen Maser (PHM) made in China are equipped in the BD3 satellites.
In order to serve the global positioning, navigation and timing users, five BD3 experimental satellites (BD3-e) have been deployed for testing the various key technologies. Then, eighteen BD3 MEOs and one GEO were launched from 5 November 2017 to 18 November 2018. It should be noted that the new generation BDS satellites bus were manufactured by the China Academy of Space Technology (CAST) and Shanghai Engineering Center for Microsatellites (SECM). New navigation signal constitution and inter-satellites links measurements are employed in the BD3 GEO and MEO satellites, which is helpful for weak signal tracking, autonomous orbit determination and expanding the short message service to global coverage. A lot of the current research has focused on the navigation signals since the proclamation of the BD2 local service. At the time, BD2 was the first navigation system in which all satellites provided signals of three frequencies, and many scholars were interested in the signal performance [
5,
6], multi-frequency Precise Positioning [
7,
8], precise orbit determination (POD) [
9,
10,
11,
12]. In addition, the satellite-induced pseudorange bias of BDS IGSOs and MEOs has been confirmed by Hauschild [
13] and Shi [
14]. Then, the pseudorange bias in BD2 GEOs has also been inferred by analyzing the single-difference (SD) ambiguity characters between satellites, which was almost the same performance as the IGSOs [
15]. Wanninger and beer proposed an elevation-dependent model to improve the IGSOs and MEOs pseudorange [
16]. Jiang analyzed the BD2 GEOs pseudorange bias using onboard observation data of low earth orbit satellite FY3-C and developed a revised method [
17]. Zhang analyzed the pseudorange code bias of BD3-e using a short baseline with two receivers, and their results showed that the satellites-induced pseudorange had been eliminated [
5]. Zhou assessed the civil signals transmitted by BD3-e using a multipath-free 40 m dish antenna, and their results showed that the pseudorange bias of B1C and B2a varied by about 0.1 m, which was compatible to GPS L2 and L5 [
18]. The PHM equipped on BD3-e satellites was also assessed and the clock bias was estimated through the two-way satellite time and frequency transfer method in Wu et al. [
19].
Although there is much research on BD3-e, it should be noted that the signal constitution of BD3-e satellites is not strictly the same as that of the BD3 Full Operational Capability (FOC) satellites. Besides, BD3-e has been served as a complement of BD2 not BD3. At present, there are almost no studies about the effective analysis of the BD3 FOC satellites. It should be noted that good signal performance is the prerequisite of reliable precisions of Positioning Navigation and Timing (PNT). The effective analysis of signal performance provides a reference for the signal selection of high-precision data processing. In addition, atomic clocks are the key components of satellites, which provide frequency standards for ranging signals. The indicator, frequency stability, can reveal the performance of atomic clocks. Thus, this paper focuses on the signal performance, Precise Orbit Determination (POD) and atomic clock’s frequency stability issues of BD3 FOC satellites, aiming at estimating BD3 performance as comprehensively as possible.
The paper is organized as follows. First, the availability and collection of data are described in
Section 2. In
Section 3, the signal performance is analyzed in detail. POD and the atomic clock’s frequency stability performance are presented in
Section 4. The main conclusions are provided in the final section.
2. Data Availability and Collection
Owing to the promotion of International GNSS (Global Navigation Satellite System) Service (IGS) [
20], the accuracy and reliability of GNSS products are improved significantly during the last two decades. The IGS network consists of more than 450 stations distributed around the world, and about 250 stations now track multi-GNSS satellites data, including GPS, GLONASS, Galileo, BDS, QZSS, IRNSS and SBAS. It should be noted that there are four frequencies of open service signals transmitted by BD3 satellites, namely, B1I, B1C, B2a and B3I, and, at present, more than 100 stations can record BD3 signals. However, affected by the firmware version, most of the receivers can only track B1I and B3I signals and even parts of those satellites. Until now, only three types of receivers that come from the IGS backbone network can track BD3 dual-frequency signals, which are made by JAVAD, Trimble and Septentrio.
The international GNSS Monitoring and Assessment Service (iGMAS) was developed by China [
21] and a backbone network has been set up in the mainland of China and around the world. The network would consist of 30 stations, in which 24 stations have been constructed. Note that all these stations can receive the BD3 open service signals. Three types of receivers, manufactured by Chinese companies, that is, the 20th and 54th Institutes of the China Electronics Technology group Corporation (CETC) and Unicore Communications, Inc., are employed by these stations.
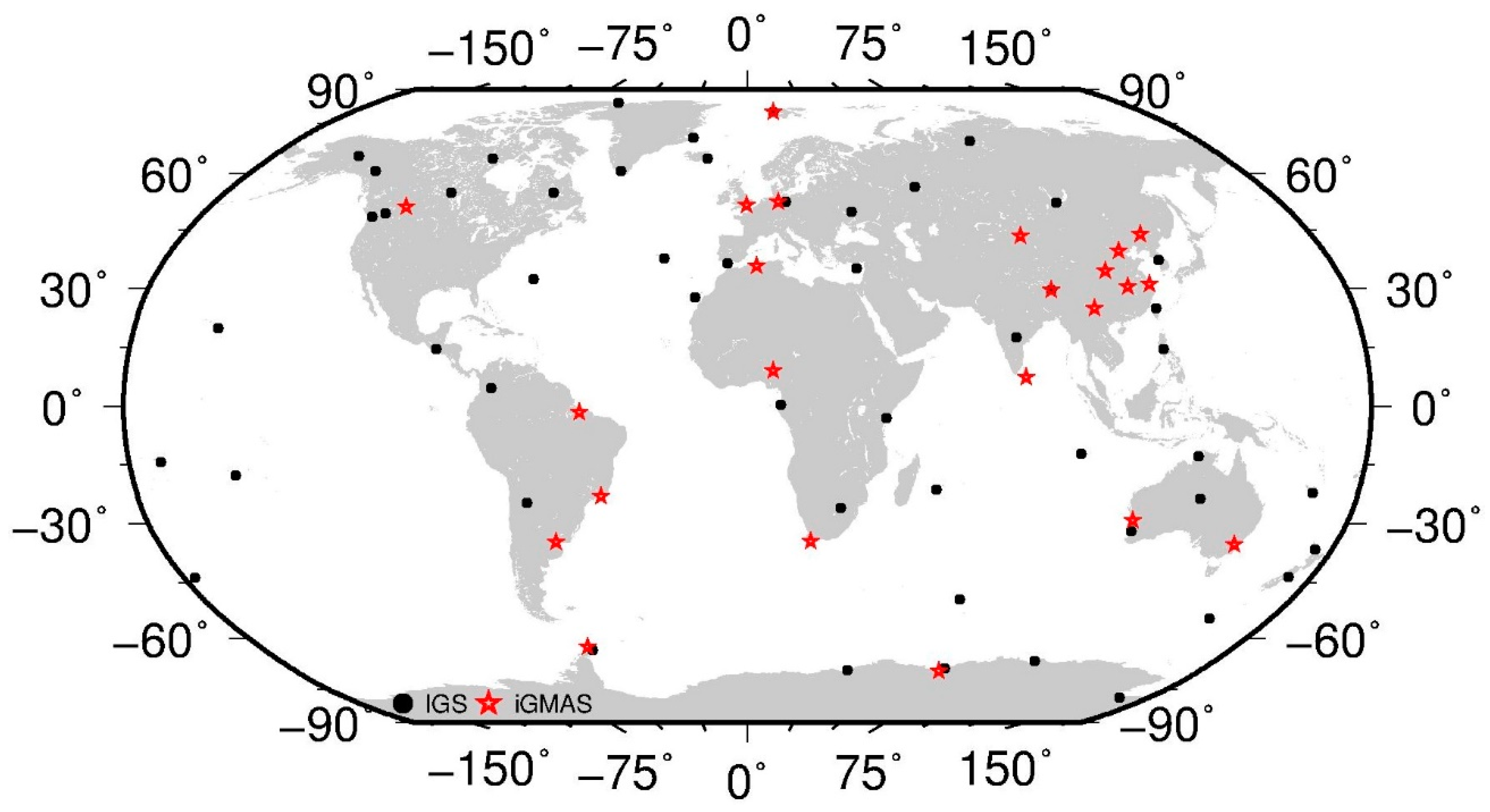
Table 1 lists the information about the capable receivers. The distribution of these stations that can track BD3 open service signals is shown in
Figure 1. Given that only receivers from iGMAS can track all the BD3 open service signals, we evaluated the signal performance using the iGMAS receivers’ data in
Section 3. In addition, considering the influence of station distribution on POD, the stations from IGS and iGMAS were used in the experiments presented in
Section 4.
4. POD and the Atomic Clock’s Frequency Stability Performance
In order to analyze the POD performance of the BD3 satellites, about 100 stations in the iGMAS and IGS backbone network are used, which can track BD3 as well as the GPS and Galileo satellites. The sites distribution is shown in
Figure 1. Note that, the dual-frequency IF combination of B1I and B3I is employed and a 72-h arc length is adopted in batch processing. The “One-step” method is utilized in the study and the POD strategy is similar to the method listed in
Table 3 using data from DOY 030 to 090.
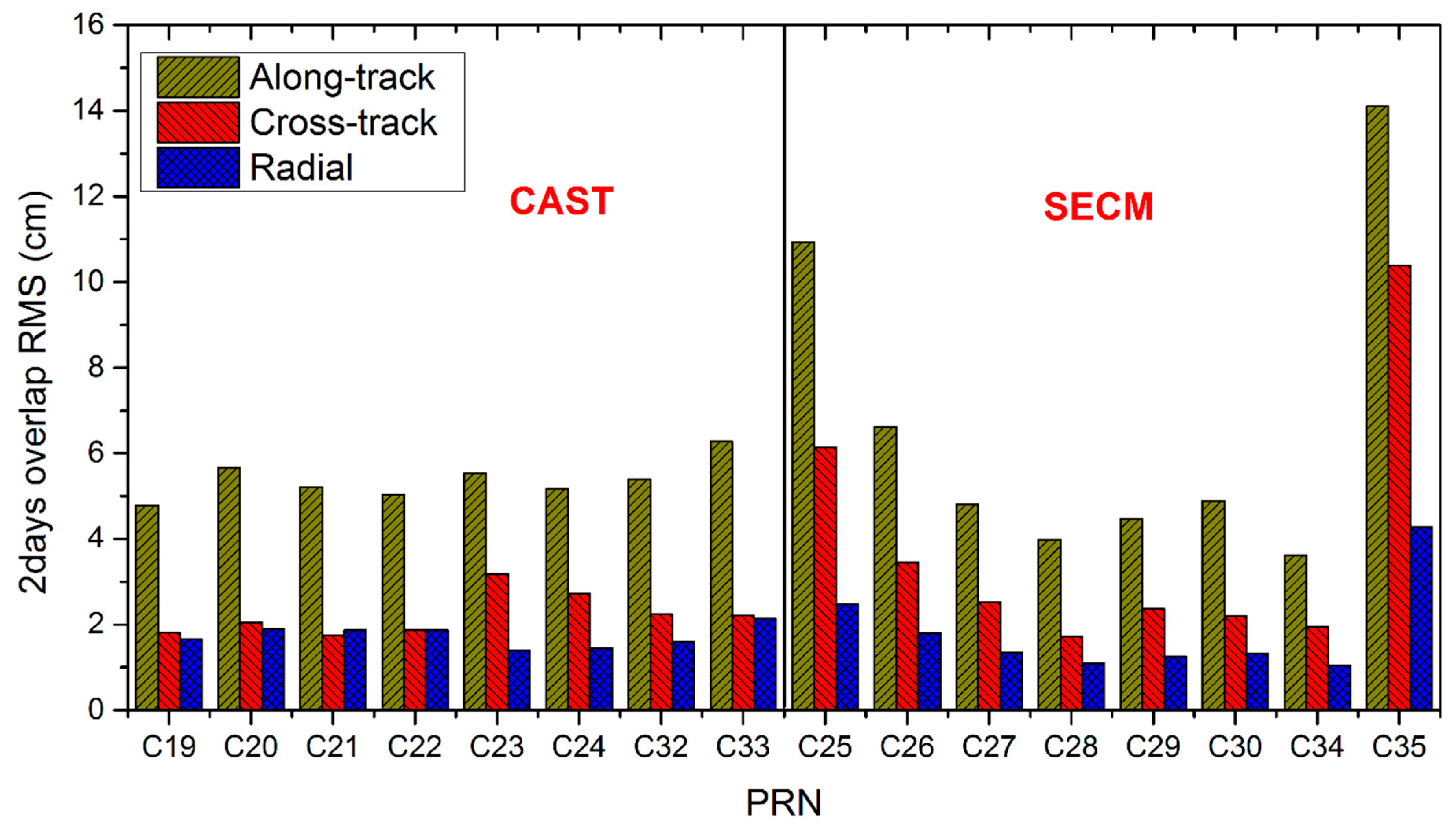
Figure 8 shows the RMS values of two-day overlap orbit in the along-track, cross-track and radial direction. As few stations can track PRN (Pseudo Random Noise code), C36 (M17), and C37 (M18) signals now, the statistical data only contains the sixteen BD3 MEO satellites. We divide these satellites into two categories according to the manufacturers, that is, C19/C20/C21/C22/C23/C24/C32/C33 made by CAST and the remaining satellites made by SECM.
Seen from
Figure 8, the two-day overlap results are almost at the same magnitude, which are about 5.0 cm in the along-track, 2.2 cm in the cross-track, 1.5 cm in the radial and 5.7 cm in the 3D direction. Besides, the SECM satellites are a little better than the CAST satellites in overlapping accuracy. Among all the sixteen satellites, C25, C26 and C35 present the worse accuracies, compared with the other satellites. This may be related to the observation count used in POD processing. It should be noted that these three satellites were launched in the second half of 2018, later than other satellites. At present, only a few receivers can track these satellites due to the old firmware version of receivers. The detailed statistical results are listed in
Table 6.
Satellite Laser Ranging (SLR) is an optical system and widely used in orbit determination and orbit validation, which can be regarded as an external measurement method to evaluate the range between satellites and laser stations. It is a two-way ranging instrument. In general, the laser is transmitted by the SLR stations and reflected by laser retroreflector array (LRA) which was installed on the satellite. Then, the range can be calculated through multiplying the time interval between laser transmitting and receiving by the vacuum speed of light. The ranging accuracy of SLR is better than 1 cm, which indicates that it is an effective measuring method for orbit validation. Considering that the maximum nadir angle measured by SLR is less than 15 deg, the main SLR residual of the orbit is the error in the radial direction.
Four satellites (C20, C21, C29 and C30) of the BD3 MEO satellites are tracked by the International Laser Ranging Service (ILRS) [
33] and the LRA offsets (expressed in satellite coordinate system) from the satellite center of the mass used in the paper are listed in
Table 7. The SLR residuals are shown in
Figure 9.
Seen from
Figure 9, the absolute values of residuals greater than 20 cm have been removed and only a few normal points are deleted. It should be noted that more than 98% of the original data are retained and used, as shown in the last three columns of
Table 8. The corresponding statistical results are also listed in
Table 8, including the mean, Standard Deviation (STD) and RMS values of the residual series. The RMS values of SLR validation series of C20/C21/C29/C30 are 5.1 cm, 6.4 cm, 4.7 cm, and 4.3 cm, and a tiny constant bias of about
cm can be found in the CAST satellites (C20, C21) and SECM satellites (C29, C30), while there is no systematic bias. Fortunately, the SLR validation accuracy is consistent with the results of the BD2 MEO satellites.
In addition, high-performance atomic clocks are very essential for satellite navigation and positioning systems. In general, clock bias can be estimated together with orbit parameters. The estimated clock bias parameters are the deviation from the system reference time, which are actually a kind of phase data. Different from the previous BD2 satellites, improved rubidium atomic frequency standard (RAFS) and the Passive Hydrogen Maser (PHM) made in China are installed on BD3 satellites. To evaluate the atomic clock frequency stability, Allan Deviation is an effective method, which can be expressed as:
where
represents the averaging time interval,
is the number of clock parameters within
,
x means the clock bias parameters.
To avoid the influence of gross errors, the trend term in the clock bias parameters is removed by quadratic linear fitting. The outliers greater than three times that of the STD are then marked and removed. In order to obtain more statistical samples, the overlapping Allan Deviation is adopted in the study and the corresponding results are presented in
Figure 10.
As
Figure 10 shows, the clock’s frequency stability of BD3 satellites improves obviously. This is mainly because the atomic clocks installed on BD2 satellites are the first generation RAFS made in China and the frequency accuracy and stability are relatively low. According to our analysis, the frequency stability of BD3 is approximately 2.43 × 10
−14 at an interval of 10,000 s, and 2.51 × 10
−15 at an interval of 86,400 s. Two distinctly sharp minima can be found in the vicinity of 86,400 s and 172,800 s, which is consistent with the orbital period. This indicates that the clock bias may be contaminated by orbit errors.
In
Figure 10, the two auxiliary dotted lines,
and
, represent white noise and random walk noise, respectively [
34]. The results about clock frequency stability of GPS, GLONASS, Galileo and BD2 satellites are also shown in the figure, and the experimental results indicate that the frequency stability of BD3 is a little better than that of the GPS Block IIF (RAFS) satellites, but worse than that of the Galileo FOC satellites (PHM). The performance of the BDS clock frequency stability at averaging time intervals of 10000 s and 86400 s is listed in
Table 9.
5. Conclusions
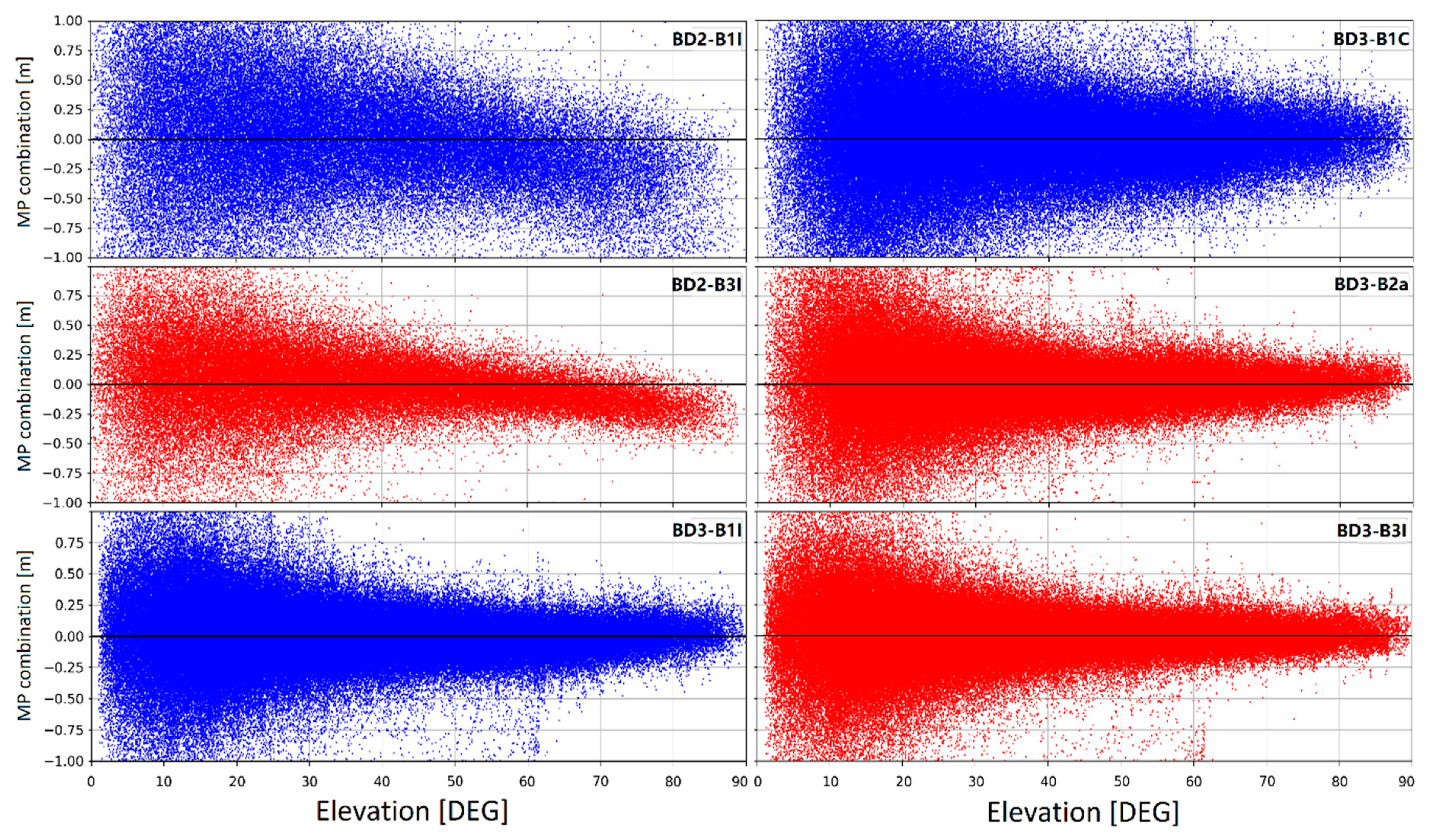
Global service of BDS has been provided since 27 Dec. 2018. At present, eighteen BD3 MEO FOC satellites have been launched into space, transmitting in four open service signals, namely B1I, B1C, B2a and B3I. In the study, we mainly focus on the signal characteristics of the BD3 open service signals. Pseudorange code noise level is estimated by multipath combination and the code bias founded in BD2 IGSO and MEO satellites are proven to be eliminated in the BD3 satellites. The multipath combinations show that the B1C pseudorange code is much noisier than the other three signals. In addition, the residuals of pseudorange and phase using four types of IF combinations with about 30-day data are evaluated by precise orbit determination. Fortunately, the pseudorange results are consistent with the multipath combination results. This may be related to the signal constitution and power distribution. The designed minimum received power levels on the ground is −159 dBW for B1C, which is 3 dB lower than that of the BDS B2a signal. According to our analysis, these designs may be the reason for the weak S/N and a slightly noisier signal performance of the B1C signal. The phase combination residuals of these four IF combinations are in the same magnitude and the residuals of B1I-B3I, B1C-B3I, B1I-B2a, B1C-B2a IF phase combinations are 5.9 mm, 5.2 mm, 4.9 mm and 4.8 mm, respectively. Considering the noise amplitude and compatibility with other GNSS, the B1C and B2a combination is recommended in priority. Inter-frequency phase bias of the BD3 satellites is also evaluated by GFIFP combination. The results show that obvious variation can be found in the GFIFP series and the amplitude is about 2 cm. Similar results are also found in the GPS BLOCK IIF satellites, but the amplitude of GPS is 5 cm. Besides, the GFIFP combination series of the Galileo is a zero mean distribution.
In addition, a multi-GNSS POD in the study is performed using about a hundred global-distributed IGS and iGMAS stations. Three-day arc length and B1I-B3I IF combination are used and the 48-h orbit overlap results show that the accuracies of the orbit are about 5.0 cm in the along-track, 2.2 cm in the cross-track, and 1.5 cm and 5.7 cm in the radial and 3D directions, respectively. Considering that the four satellites of BD3 can be tracked by ILRS, the RMS values of the SLR residuals for C20, C21, C29, and C30 are 5.1 cm, 6.4 cm, 4.7 cm and 4.3 cm respectively. The atomic clock’s frequency stability is evaluated as well, using the clock bias parameters calculated in POD. The results of overlapping Allan Deviations show that the frequency stability of BD3 is approximately 2.43 × 10−14 at an interval of 10,000 s and 2.51 × 10−15 at an interval of 86,400 s, which is a little better than that of the GPS BLOCK IIF satellites but worse than that of the Galileo FOC satellites.
According to the study above, compared with the BD2 satellites, the performance of the BD3 FOC in-orbit satellites has been significantly enhanced in the signal performance and atomic clock’s frequency stability. Thus, better performance can be expected with the full constellation operation by the end of 2020.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}