3.3.1. Visual Assessment
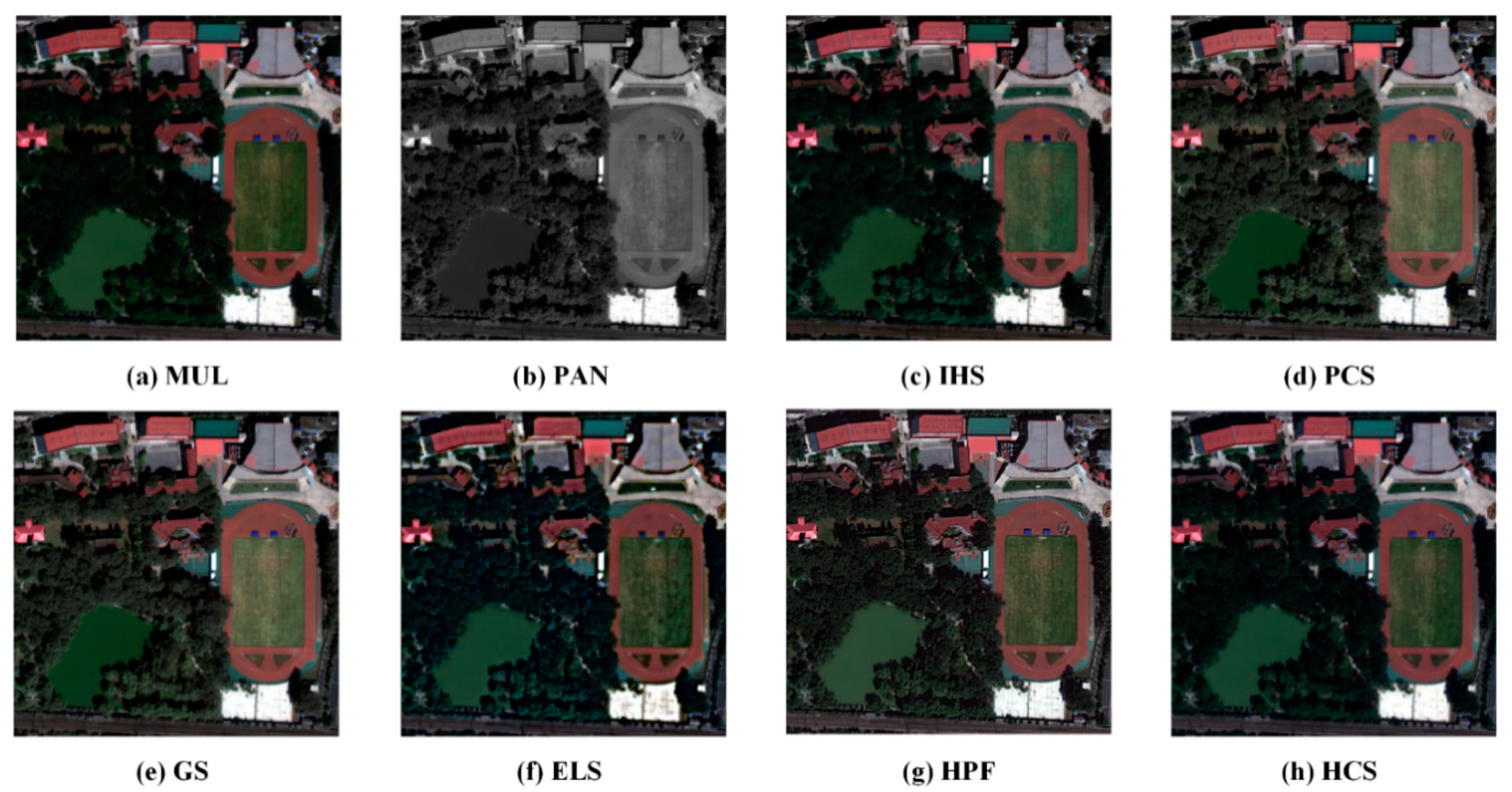
The results of six fusion methods are shown in
Figure 11. By checking whether the spectral resolution of the fused image is maintained and whether the spatial resolution is enhanced, the quality of the fused image and the adaptability of the method can be evaluated on the whole.
In order to achieve a more detailed visual interpretation effect, this study fuses the images of water, vegetation, roads, playgrounds, and bare land to establish the corresponding atlas (
Table 4).
Firstly, we analyze the spectral feature preservation ability of fused images. Compared with the original multispectral image, the fused image basically maintains the spectral characteristics, but there are also significant differences in local color.
The overall color of IHS, PCS, and HCS fusion images is consistent with the original multi-spectral remote sensing image, and the color contrast is moderate. The color of construction land in the GS fusion image is brighter than that of original image combination, and the color of river water changes from grass green to dark green compared with original image combination. After ELS fusion, the brightness of the fused image is darker and the contrast of the image is reduced. After HPF fusion, the edge of the fused image is obvious and the sharpening effect is outstanding.
In terms of spatial information enhancement ability, by comparing the results of the six methods with panchromatic images, we can find that the linear objects, such as roads, water bodies, playgrounds, and residential contours, can be better distinguished and the texture structure of fused images becomes clearer.
PCS, GS, and HPF fusion images have better visual effects, with prominent edges and clear textures of residential areas, roads, playgrounds, water, and woodlands, which are easy to visually interpret. Compared with the three aforementioned methods, IHS and HCS fusion images have some deficiencies in texture clarity of woodland and water bodies, and the other features are very similar in both spectral and spatial characteristics. The ELS transform has serious duplication and blurring phenomena on the boundaries of roads, playgrounds, water, and woodland. In the interlaced area of woodland and architecture, the land features appear inconsistent.
By subjective evaluation of the color, texture structure, clarity, and spatial resolution of the fused image, the quality of the fused image and the superiority of the fusion method can be evaluated as a whole. However, the subtle differences of spectral and spatial characteristics of many fusion images cannot be well distinguished by visual assessment alone. It is necessary to use objective evaluation methods to quantitatively describe the differences between different algorithms.
3.3.2. Quantitative Assessment
This Quantitative evaluation of fusion effect is a complex problem. The objective evaluation method is to determine the statistical parameters of fused images. This method greatly improves the certainty and stability of evaluation.
In this paper, the mean value of each band of the fused image is used to reflect the overall brightness of the image. The main expression is as follows:
F (i, j) is the gray value of the fused image F at the pixels (i, j), M and N are the size of image F. The higher the mean value is, the brighter the overall brightness of the image is.
Standard deviation and information entropy are used as quantitative indicators to evaluate image information richness. The standard deviation is obtained indirectly from the mean value, which indicates the degree of dispersion between the gray value and the mean value of the image pixel. The expression of the standard deviation is as follows:
The information entropy of fusion image can reflect the amount of image information. Generally, the larger the entropy of the fused image is, the better the fusion quality will be. The calculation equation is as follows:
Ce is the information entropy; is the occurrence probability of the gray value i of the pixel in the image; L is the maximum gray level of the image.
The definition of the average gradient response image is used to reflect the contrast of minute details and texture transformation features in the image simultaneously. The main expression is as follows:
Spectral distortion degree is used to evaluate the spectral distortion degree of the fused image relative to the original image. The spectral distortion expression is defined as:
W is the total number of pixels in the image, and are the gray values of the fused image and the original image (i, j).
The correlation coefficient with each band of the multispectral image and coefficient of correlation between each band of the fused image and panchromatic image are used as quantitative indicators to measure the spectral fidelity (i.e., the degree of preservation of the advantages of the original panchromatic band and the multispectral band in both geometric and spectral information). The related expression is as follows:
where
and
represent the average gray level of fusion image and source image, respectively. The larger the correlation coefficient, the more information the fusion image gets from the source image, the better the fusion effect.
Table 5 shows the statistical analysis between different fusion methods. Comparing the brightness information of fused images, we find that PCS has the largest mean value in R and G bands. The values of the two bands are 322.45 and 396.63, respectively. ELS has the largest mean value in the B band with 397.25 values. The brightness information of GS(R band: 313.25; G band: 380.74; B band: 243.82), HPF(R band: 312.58; G band: 379.63; B band: 242.70,) and HCS(R band: 313.43; G band: 381.05; B band: 243.88) is not significantly different from that of the original multispectral image (R band: 313.08; G band: 380.13; B band: 243.20). Compared with other fusion methods, these three methods have more scene reductively.
Firstly, we can evaluate the spatial information of fused images by standard deviation. From the comparative analysis of standard deviation information, the values of PCS, HCS, HPF, and HCS are stable, which are close to or higher than the original multispectral images. It shows that the gray level distribution of the images is more discrete than the original ones, and the amount of image information has increased, among which PCS (R band: 95.694; G band: 167.71; B band: 173.94) has achieved the best results. The standard deviation of IHS (B band: 88.860) and ELS (B band: 82.816) in the B band is small, which indicates that the gray level distribution of the image is convergent and the amount of image information is reduced.
From the information entropy index, the information entropy of each fusion image is close to or higher than that of the original multi-spectral image. The increase of information entropy indicates that the information of each fusion image is richer than that of the pre-fusion image. In the R band, IHS and ELS reached 1.558 and 1.583 above average, respectively. PCS and HCS fusion methods achieve the overall optimal effect in the G (PCS: 1.328; IHS: 1.324) and B bands (PCS: 1.557; IHS: 1.558), indicating that the information richness of PCS and HCS fusion images are higher than that of other fusion images.
From the analysis of the definition (average gradient) of the fused images, the average gradient of the six fusion images in the G and B bands is close to or higher than that of the original multi-spectral images, except for the R band. This shows that the six fusion methods have been enhanced in spatial information, and the expression effect of detailed information is higher. The HPF fusion method performs best in image clarity.
Comparing the spatial correlation coefficients of six fused images with the original color images, we find that PCS(R band: 0.981; G band: 0.983; B band: 0.973) and GS(R band: 0.976; G band: 0.976; B band: 0.978) achieve better results, indicating that the geometric details of fused images are more abundant, and the spatial correlation between the PCS fusion image and the original image is the highest.
The correlation coefficients of images need to consider not only the ability of the processed image to retain the spatial texture details of the original high spatial resolution image, but also the ability of the image to retain spectral characteristics. Comparing the spectral correlation coefficients between the fused image and the original multi-spectral image, we find that the fused image of PCS, GS, HPF, and HCS has a high correlation with the original image, among which the HCS fusion method has the lowest change in spectral information and the strongest spectral fidelity.
From the analysis of spectral distortion degree, the distortion of IHS in the R band and B band is 105.40 and 96.95, respectively, and ELS (R band: 112.68; B band: 165.51) is much higher than other methods. However, in the G band, the distortion of IHS and ELS is 27.602 and 31.553, respectively, while PCS obtained the maximum distortion of all methods of 47.888, which shows that the performance of different methods in different bands is greatly different. Overall, the distortion degree of his (R band: 105.40; G band: 27.602; B band: 96.955), ELS (R band: 112.68; G band: 31.553; B band: 165.51), and PCS (R band: 27.949; G bands: 0.976; B band: 0.978) is too large, which indicates that the distortion degree of image spectra is greater. The spectral distortion of GS, HPF, and HCS fusion methods is small, which indicates that the spectral distortion of fusion images is low, among which HCS (R band: 0.946; G band: 0.973; B band: 0.988) achieves the best effect.
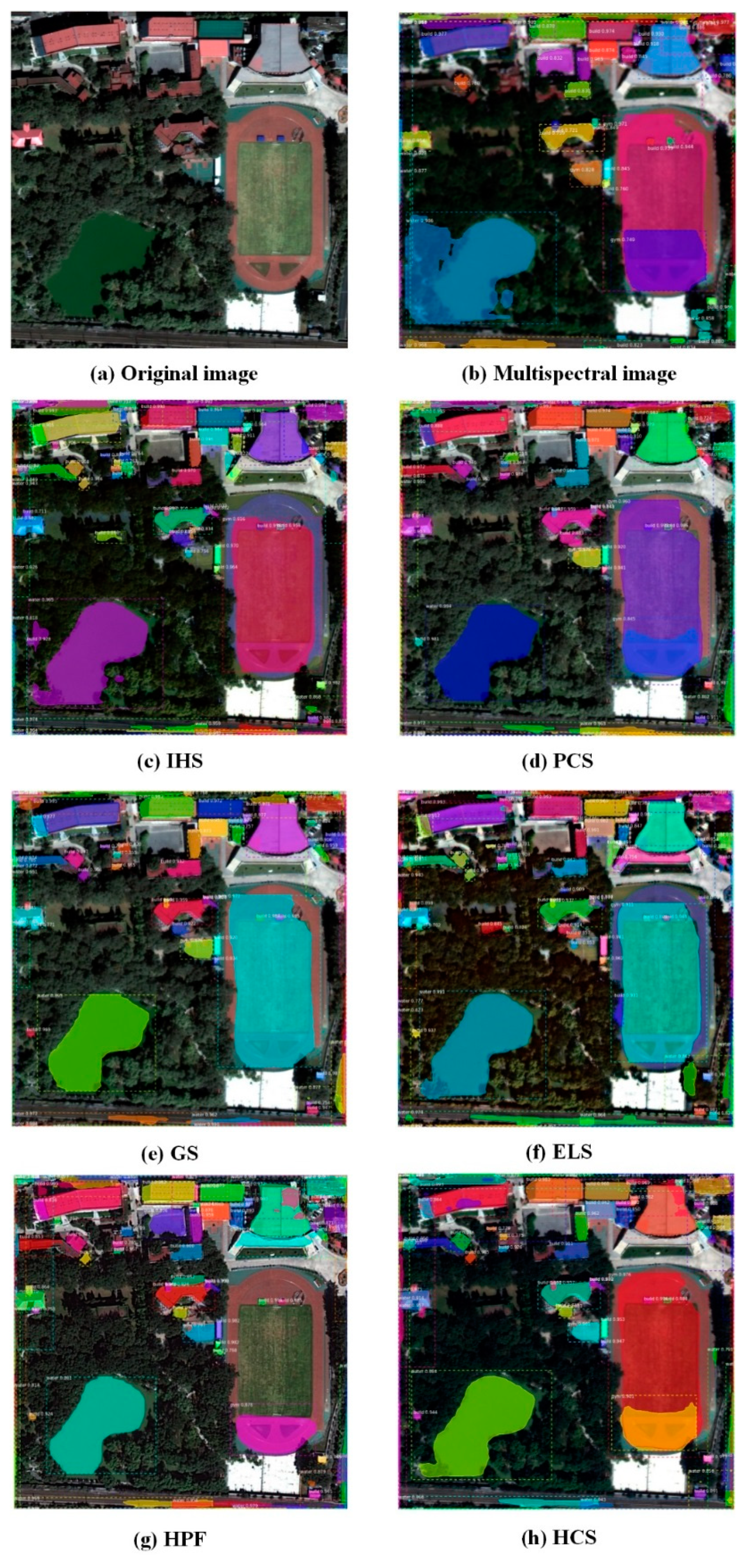
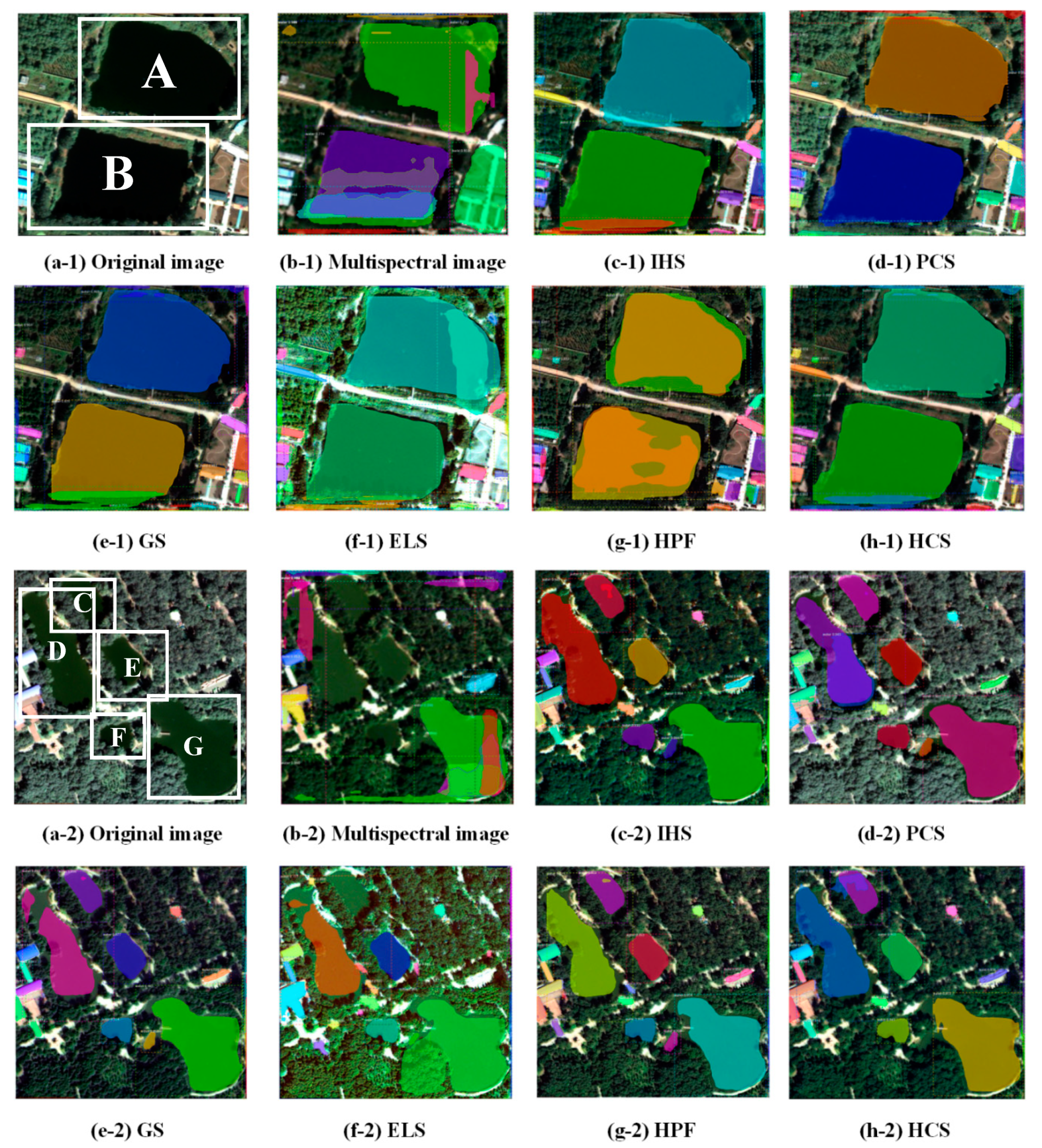
3.3.3. Accuracy Assessment of Objectification Recognition
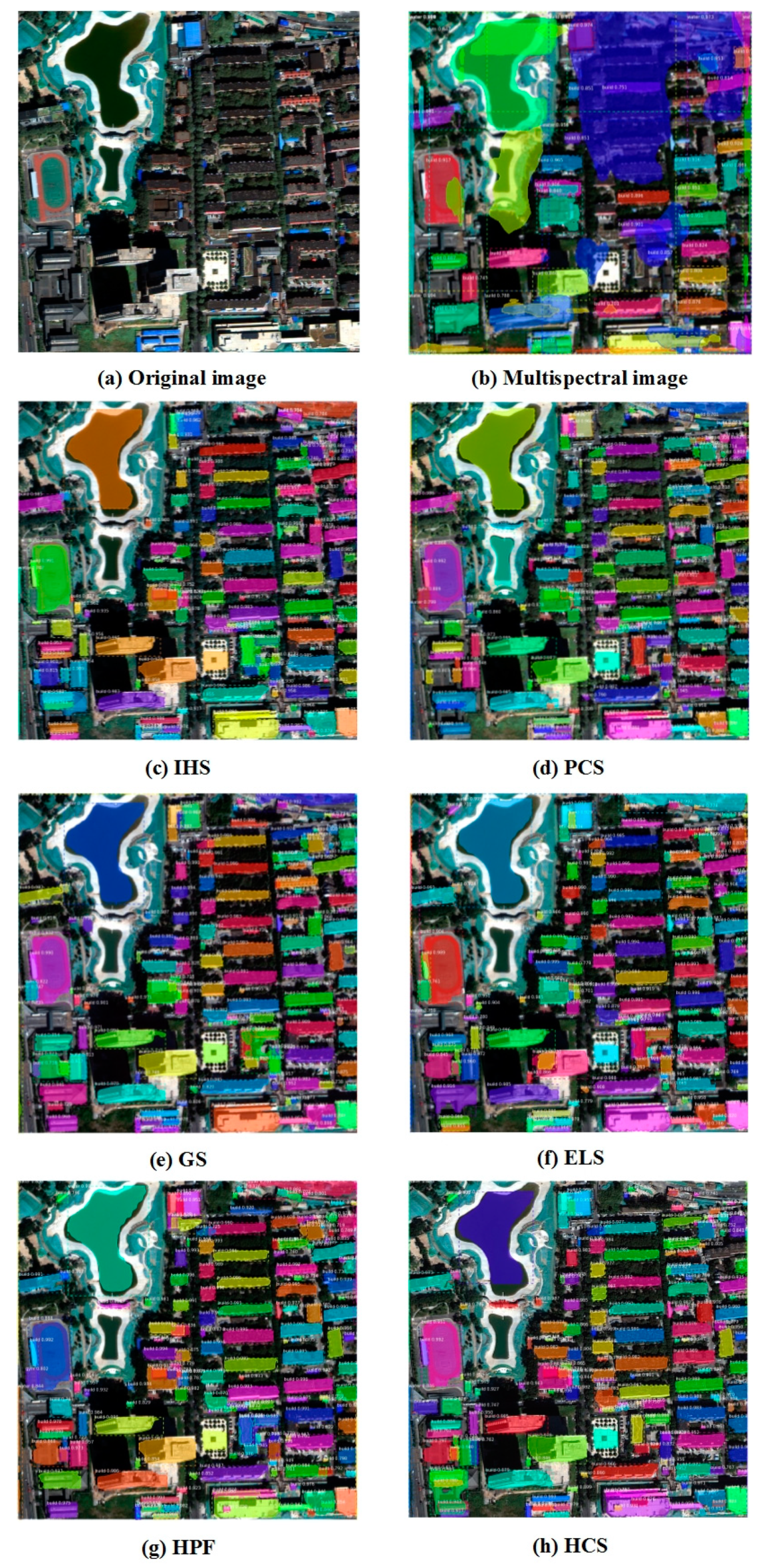
Figure 12 is the recognition result of six fusion methods using the Mask-RCNN model. In
Figure 12c–h, the fusion images generated by different fusion methods have different recognition results for buildings, water bodies, and playgrounds. Among them, the overall recognition results obtained by GS and PCS are better, followed by HPF and HCS. The results for IHS and ELS have less satisfying effect.
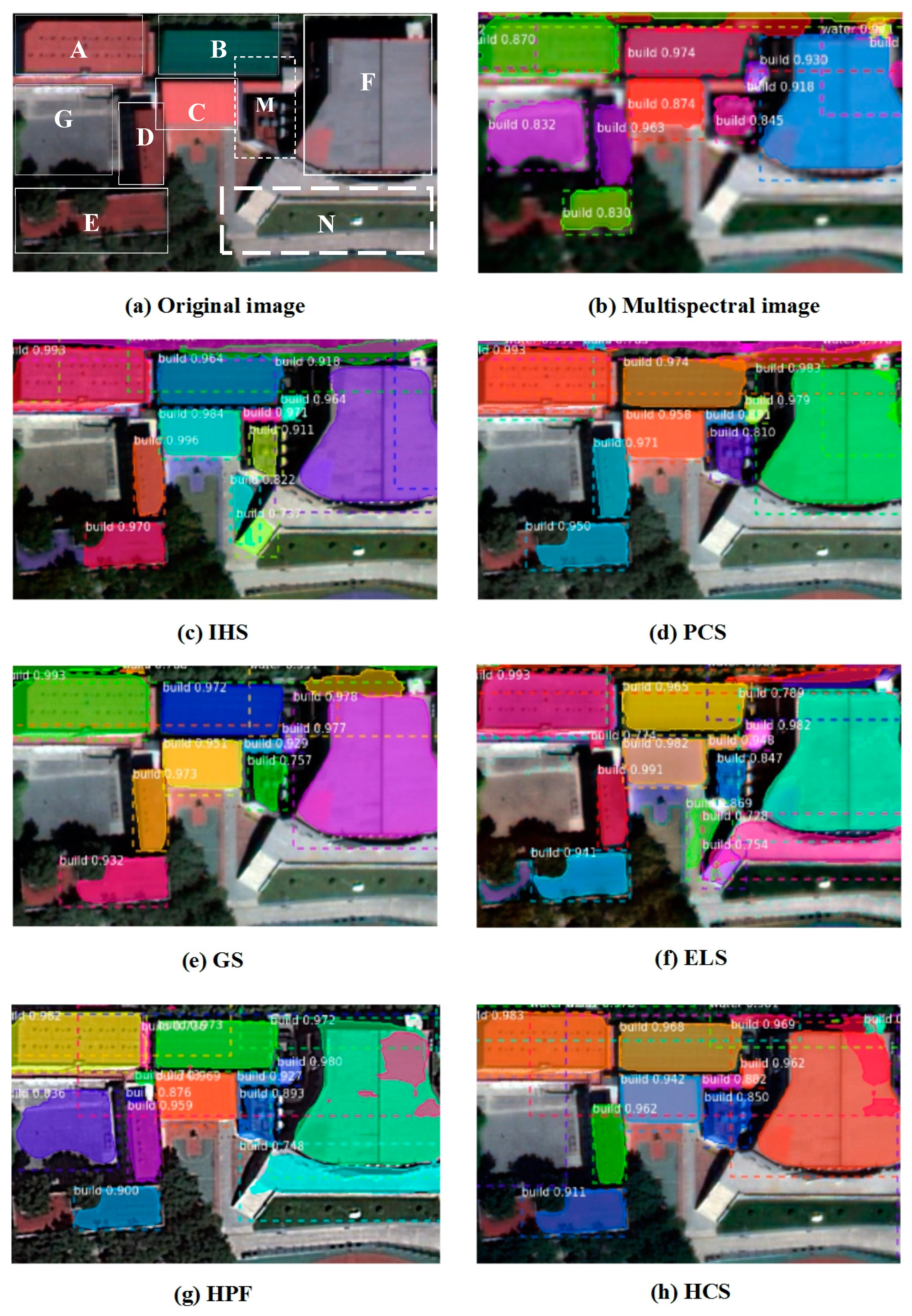
Figure 13 is the recognition result of typical buildings in the fusion image of six methods. The building recognition effect of the left-upper region (Building A, B, C, and D) and right-upper region (Building F), with obvious edge differences, achieves good performance, and almost all of them can be recognized correctly.
The confidence level of object recognition is shown in
Table 6. The confidence of PCS in five buildings with clear outlines is the only one of the six methods where all values reach above 0.95. In building A, B, and F, the confidence of PCS is the highest, at 0.933, 0.974, and 0.983, respectively. In building C and D, the confidence of IHS is the highest, at 0.984 and 0.996, respectively. Building E in the lower left area interwoven with vegetation or shadows is shown to be partially unrecognizable. Among the recognition results of building E, the masks based on six fusion methods cannot clearly depict the edges of buildings. The confidence of the recognition results is the lowest among all building individuals. IHS achieves the highest value of 0.970, and PCS achieves confidence of 0.950.
The buildings with small building areas in the middle region (Area M) are easy to be missed due to the interference of spectral characteristics and shadows. Occasionally, buildings with prominent roof structures are misidentified as multiple buildings, resulting in repeated detection. Area N in
Figure 13 is composed of stairs and lawns. Except for ELS and HPF, there is no misidentification in other methods. Area G is actually empty space. The HPF method misidentified area N as a building.
Considering the overall effect of building recognition, PCS is the best, achieving more accurate segmentation of building edges, followed by IHS, GS, and HCS, and lastly ELS and HPF, which have different degrees of omission and misidentification.
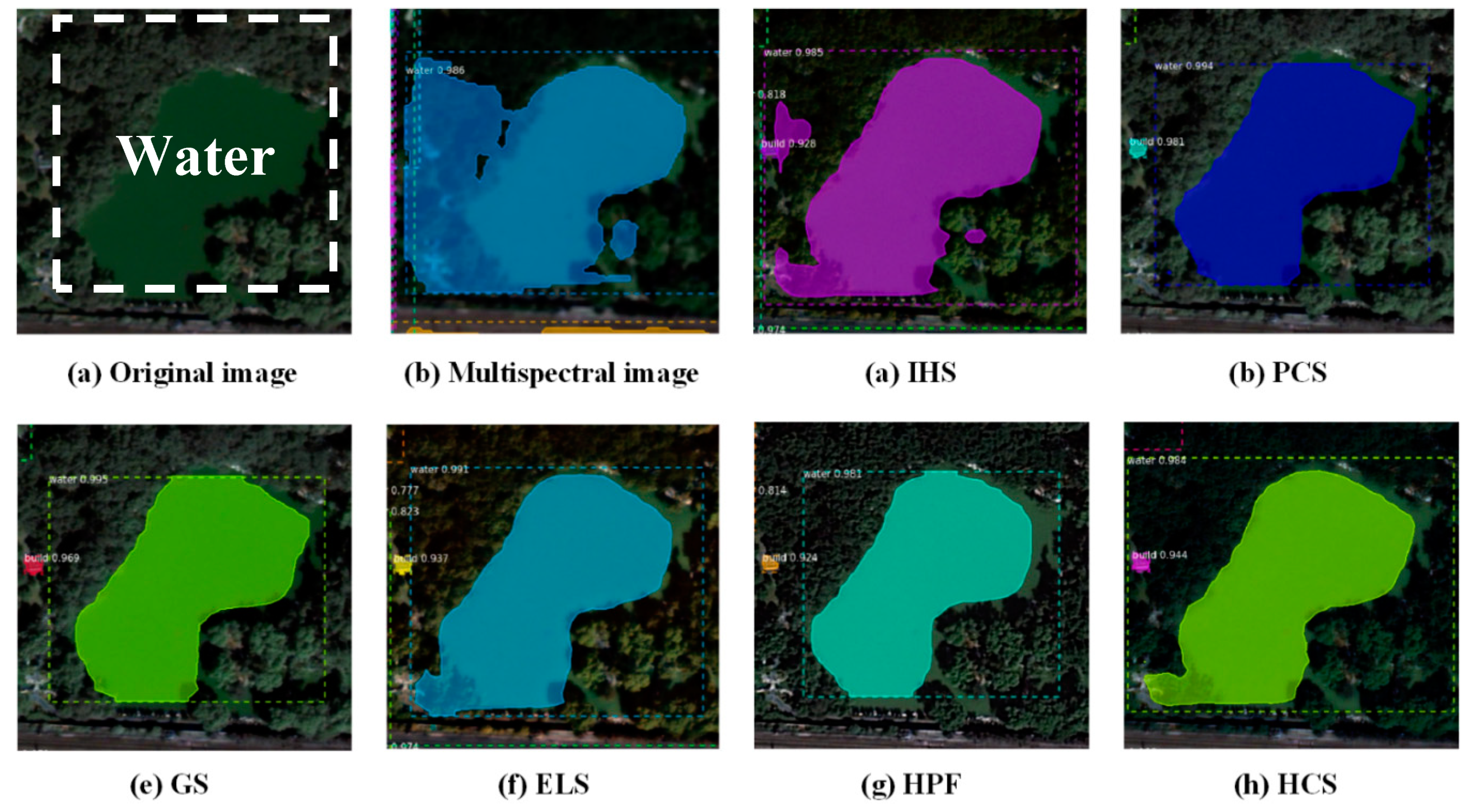
Figure 14 is the result of water body recognition in the fusion image of six methods. PCS, GS, and HPF have better segmentation effect. PCS and GS work better in segmentation of water body edges. The confidence of the two methods is 0.994 and 0.995 (
Table 7), respectively. IHS, ELS, and HCS cannot distinguish the confusing parts of water bodies and vegetation shadows.
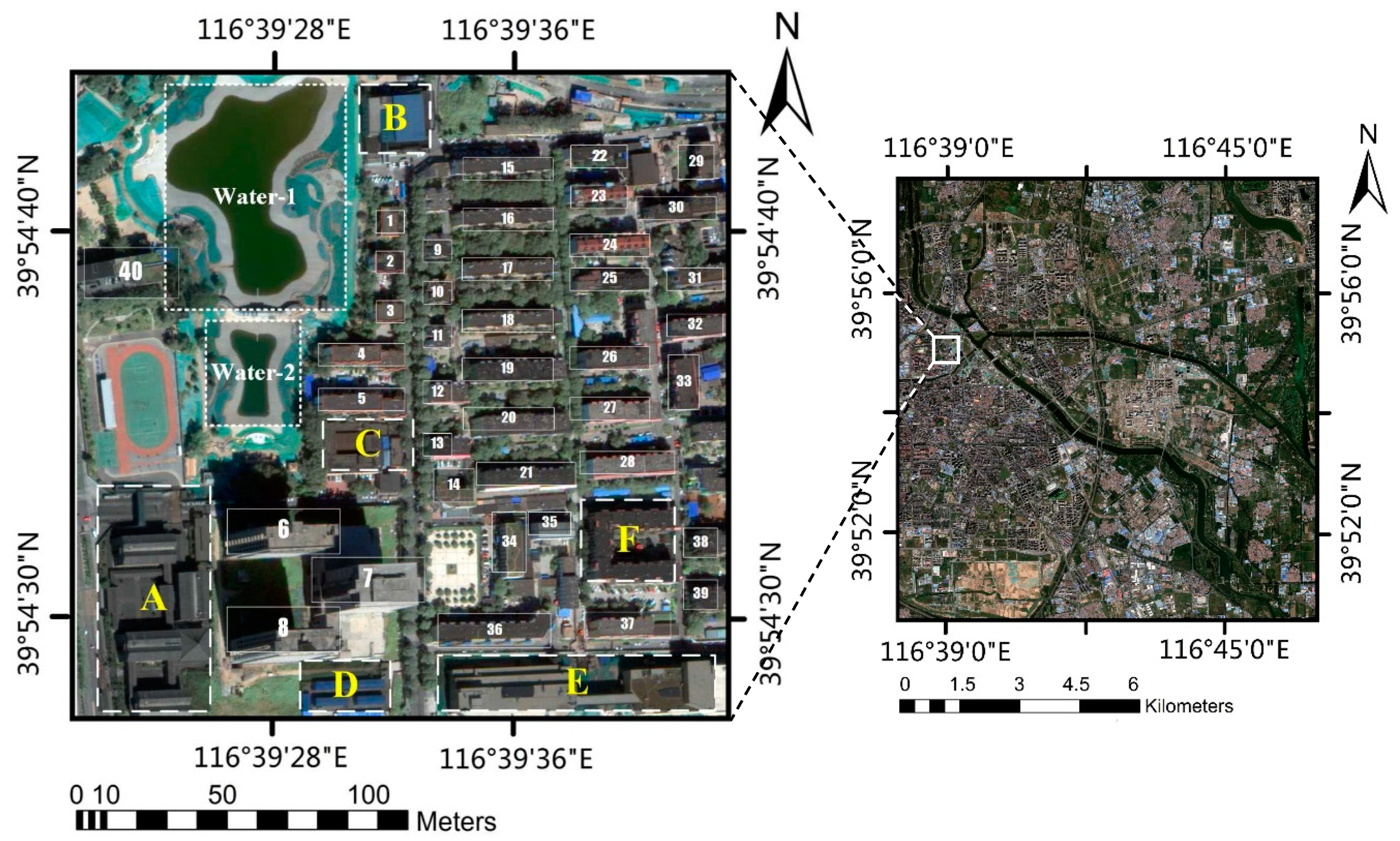
In order to further verify the land cover (features) object recognition efficiency of the model for buildings by using six fusion methods, we selected an experimental area with denser buildings and more building types for building recognition (
Figure 15). In total, 50 single buildings in the experimental area were identified by visual interpretation, and six complex building areas were divided for overall analysis.
Through the recognition results in
Figure 16, we find that the image recognition effect after fusion has been greatly improved. The recognition results of multi-spectral remote sensing images have significant instances of misidentification and omission.
The IHS fusion method missed three buildings, ELS and HPF methods have miss one building. And PCS, GS, and HCS miss no detection. The six methods have achieved effective case segmentation for 40 single buildings. Combined with the data comparison results of
Table 8 for confidence level, PCS (0.973) > HCS (0.965) > GS (0.956) > ELS (0.948) > HPF (0.930) > IHS (0.929), we can conclude that the PCS method achieves the best results. Through the recognition results of complex building areas, we find that multi-spectral remote sensing images are recognized as blurred edge masks, which cannot distinguish building units. A–F regions are irregular composite buildings. The recognition results of six fusion images show different degrees of fragmentation, which also provides a breakthrough point for our subsequent training of neural networks and the transformation of the network structure.
In order to further quantitatively evaluate the recognition effect, we evaluate the detection accuracy of buildings in the experimental area by calculating precision and recall.
Table 9 shows the results of six fusion methods and multispectral imagery. PCS achieves precision of 0.86 and recall of 0.80. These two indicators are the highest in the six methods. The precision of the multispectral image is only 0.48 and the recall is only 0.197, which also proves that image fusion can significantly improve the effectiveness of object recognition based on deep learning.
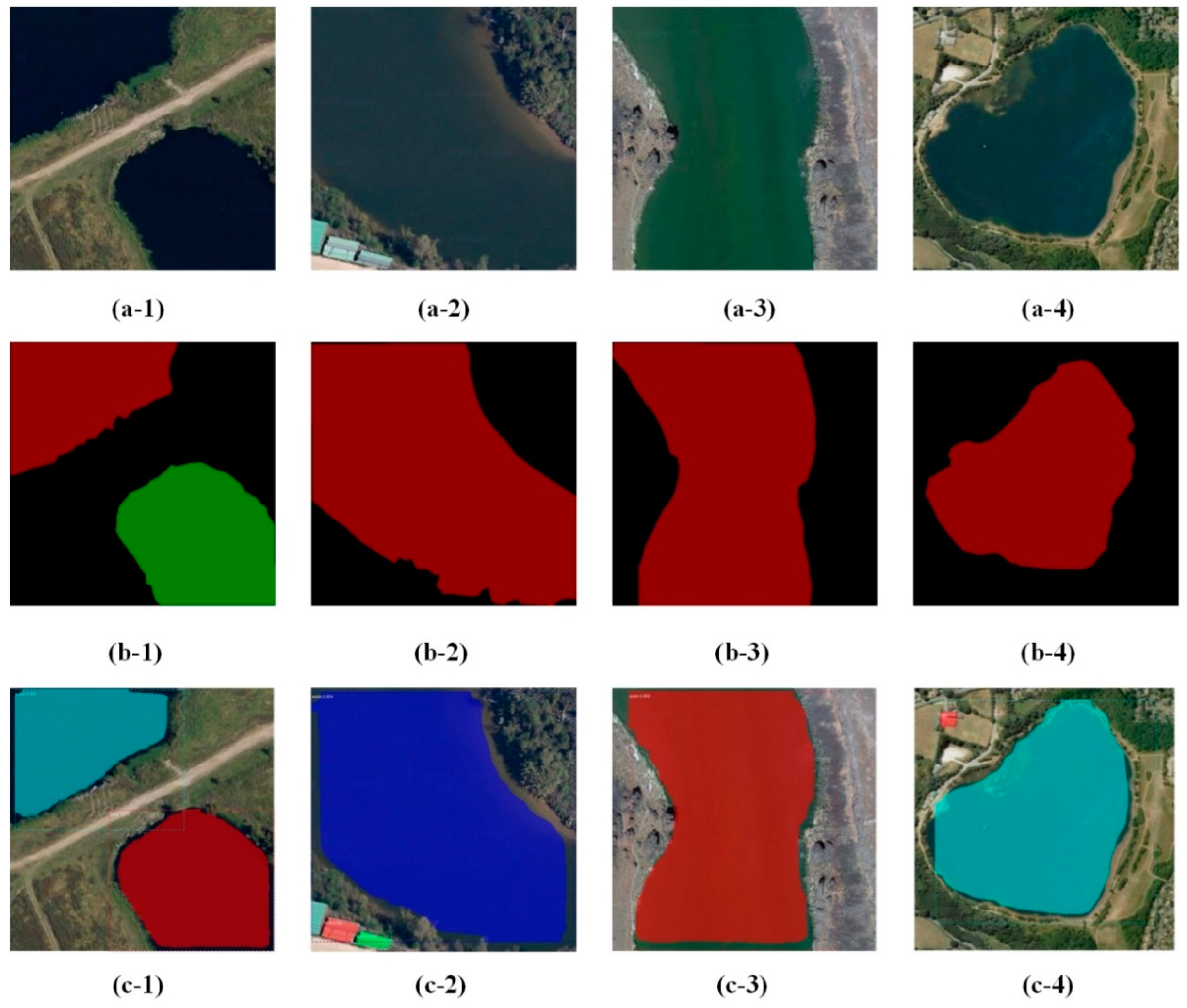
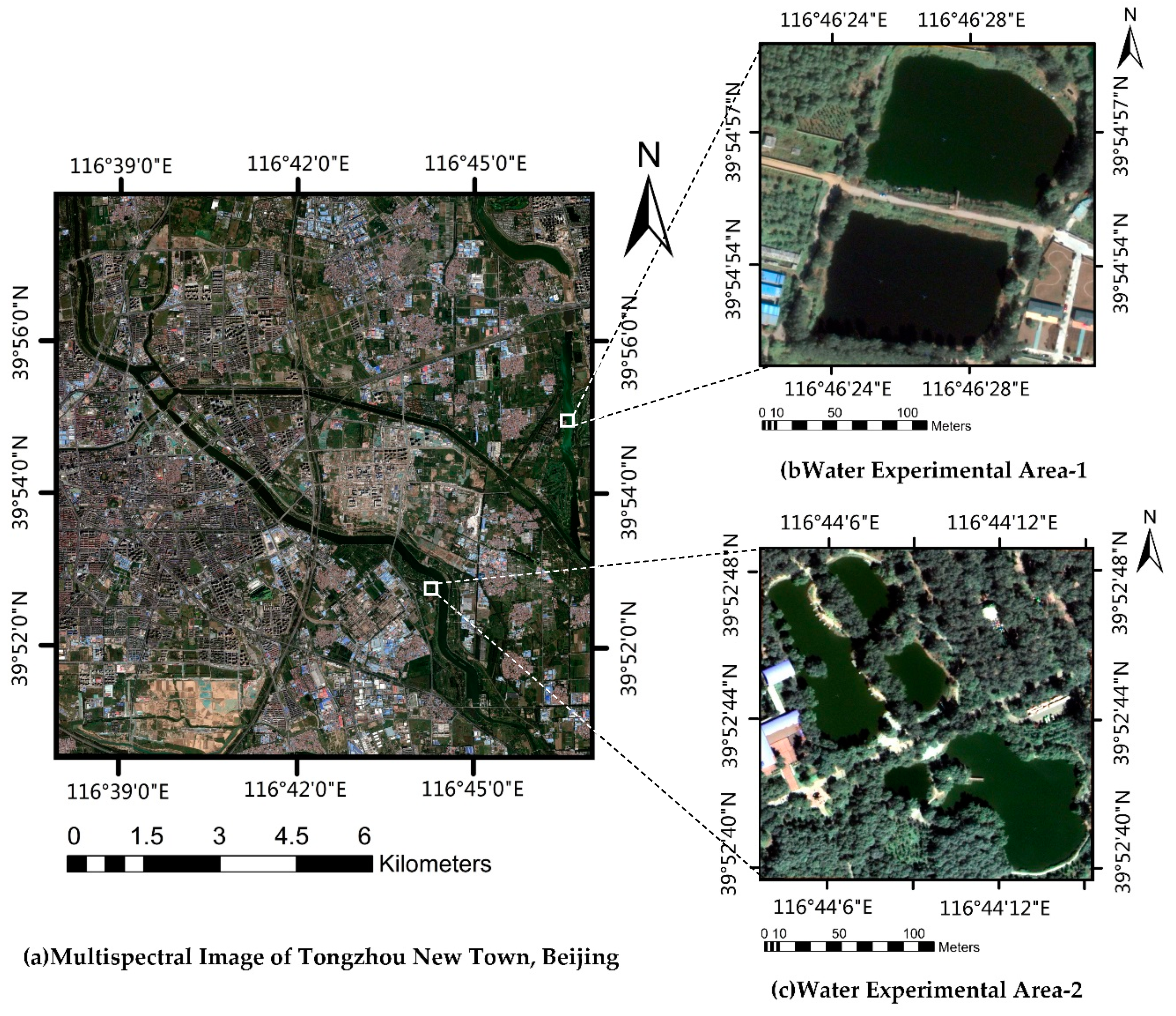
In addition, we selected two experimental areas (
Figure 17) with similar and scattered water bodies to further verify the recognition efficiency of water bodies in the image generated by six fusion methods. The water bodies in the selected experimental area are different in size. Dense vegetation and shadows are interlaced with water bodies, which are liable to cause confusion.
Through the recognition results of
Figure 18, we find that in the multispectral remote sensing image, the edges of water bodies in regions A and B are significantly confused with vegetation, and the green space is mistaken for a water body. There is a serious missing detection phenomenon in regions C–G. Compared with this, the recognition results of six fusion methods have been greatly improved. PCS can better distinguish the confusing parts of water bodies and vegetation shadows. PCS has the best edge segmentation effect. There is no large area of water missing or overflowing in the segmentation mask.
Table 10 shows the data comparison of confidence level, PCS (0.982) > GS (0.944) > HCS (0.934) > IHS (0.931) > HPF (0.904) > ELS (0.767), combined with the water detection results of six fusion methods and multispectral imagery from
Table 11, we conclude that PCS has the best effect.
Table 12 reports the computation times of our proposed methods on three experimental areas (experimental area-1, water experimental area-1 and area-2). Combined with detection results in
Table 9 and
Table 11, we can conclude that the computing time is proportional to detection of objects. How to achieve the balance of efficiency and effect through the improvement of the algorithm is the next important research direction.
From the above experiments, we can draw a conclusion that the object recognition method based on Mask-RCNN applied in this paper can recognize objects. The image recognition effect for two types of objects largely varies with different fusion methods, and the overall effect of PCS and GS is better. It is noteworthy that there is a common phenomenon in the results of object recognition. The segmentation effect of the edge of the mask is not satisfying, and the edge of the mask cannot be fully fitted to the object for segmentation. In the subsequent sample making and model improvement, the segmentation effect of the edge of the object needs to be further optimized.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















































