Anomaly Detection for Hyperspectral Imagery Based on the Regularized Subspace Method and Collaborative Representation



Abstract
:
1. Introduction
2. Proposed Methods
2.1. The Unsupervised Nearest Regularized Subspace (UNRS) Algorithm
2.2. Collaborative Representation (CR)
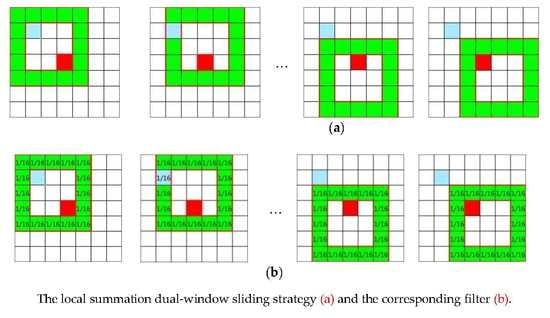
2.3. Local Summation Unsupervised Nearest Regularized Subspace with an Outlier Removal Anomaly Detector (LSUNRSORAD)
| Algorithm 1: The LSUNRSORAD Algorithm. |
| Input: Hyperspectral data , window size (), and parameter λ |
| for all pixels do |
| for each window do |
| (1) For each test pixel y, a 2D matrix is constructed based on the pixels within the dual window by ; |
| (2) Remove outlier pixels in matrix according to Equation (18) and Equation (19); |
| (3) Calculate the weight vector by Equation (9); |
| (4) Calculate the detection result of each window measurement by Equation (20); |
| end for |
| (5) Calculate the final detection result by Equation (21); |
| end for |
| Output: Anomaly detection map |
2.4. Local Summation Anomaly Detection Based on Collaborative Representation and Inverse Distance Weight (LSAD-CR-IDW)
| Algorithm 2: LSAD-CR-IDW Algorithm |
| Input: Three-dimensional hyperspectral cube , window size , and parameter |
| for all pixels do |
| for each window do |
| (1) For each test pixel , a 2D matrix is constructed based on the pixels within the dual window by ; |
| (2) Calculate the weight vector for each window by Equation (27); |
| (3) Calculate the detection result of each window by Equation (20); |
| end for |
| Calculate the final detection result by Equation (21); |
| end for |
| Output: Anomaly detection map |
3. Experiments and Analysis
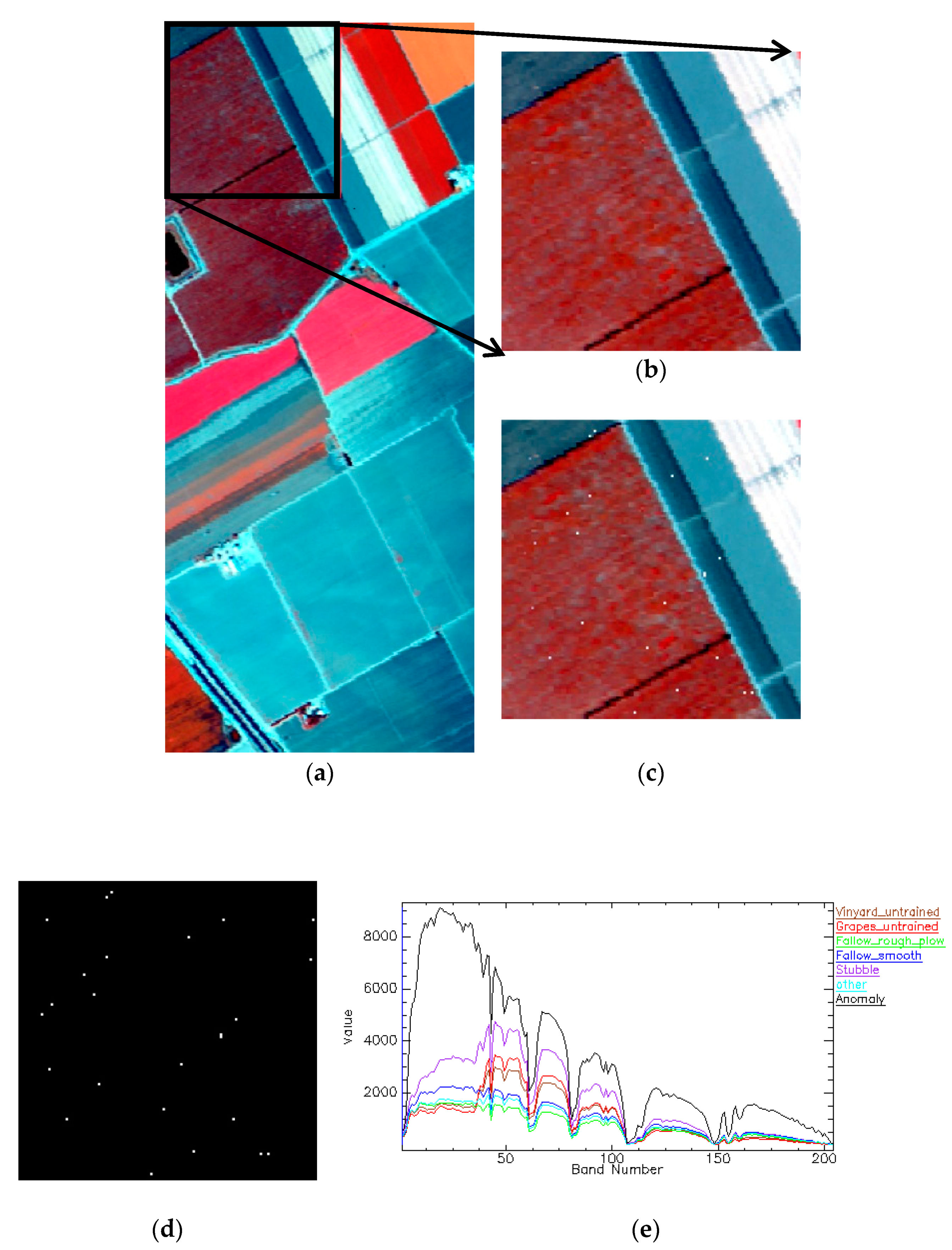
3.1. Synthetic Data Experiment
3.1.1. Synthetic Data Description
3.1.2. Parameter Analysis
3.1.3. Detection Performance
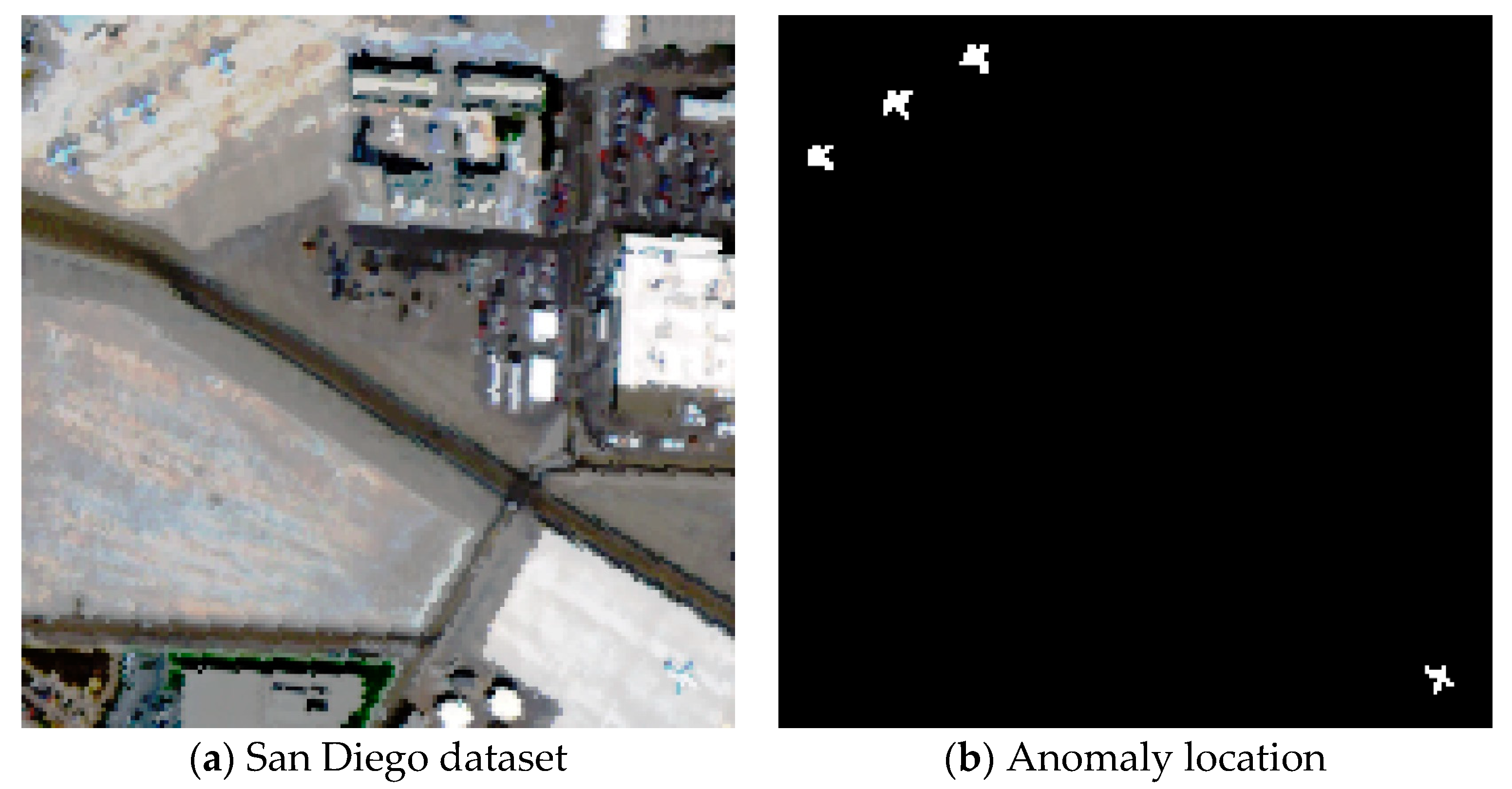
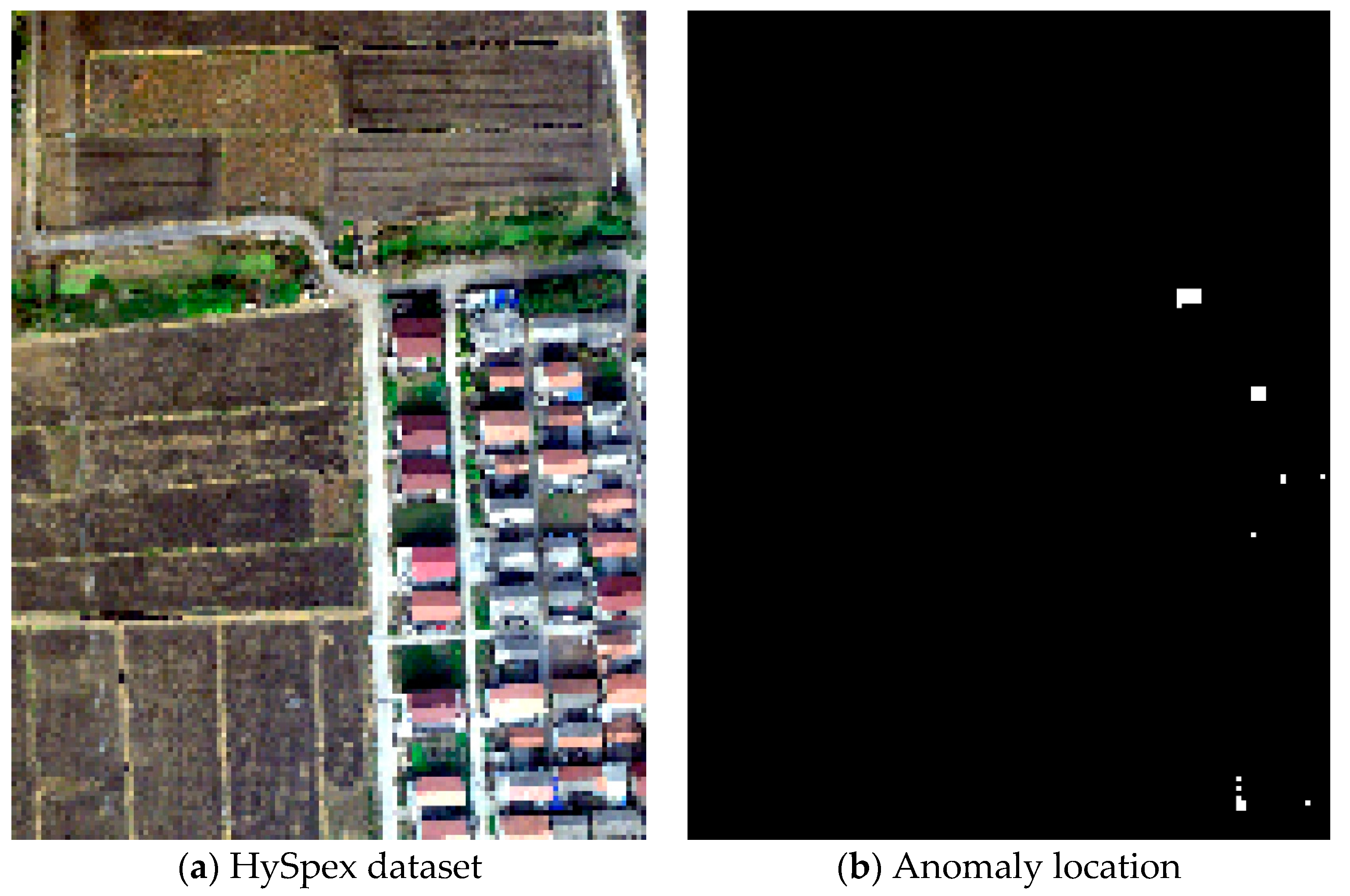
3.2. Real Data Experiments
3.2.1. Real Datasets Description
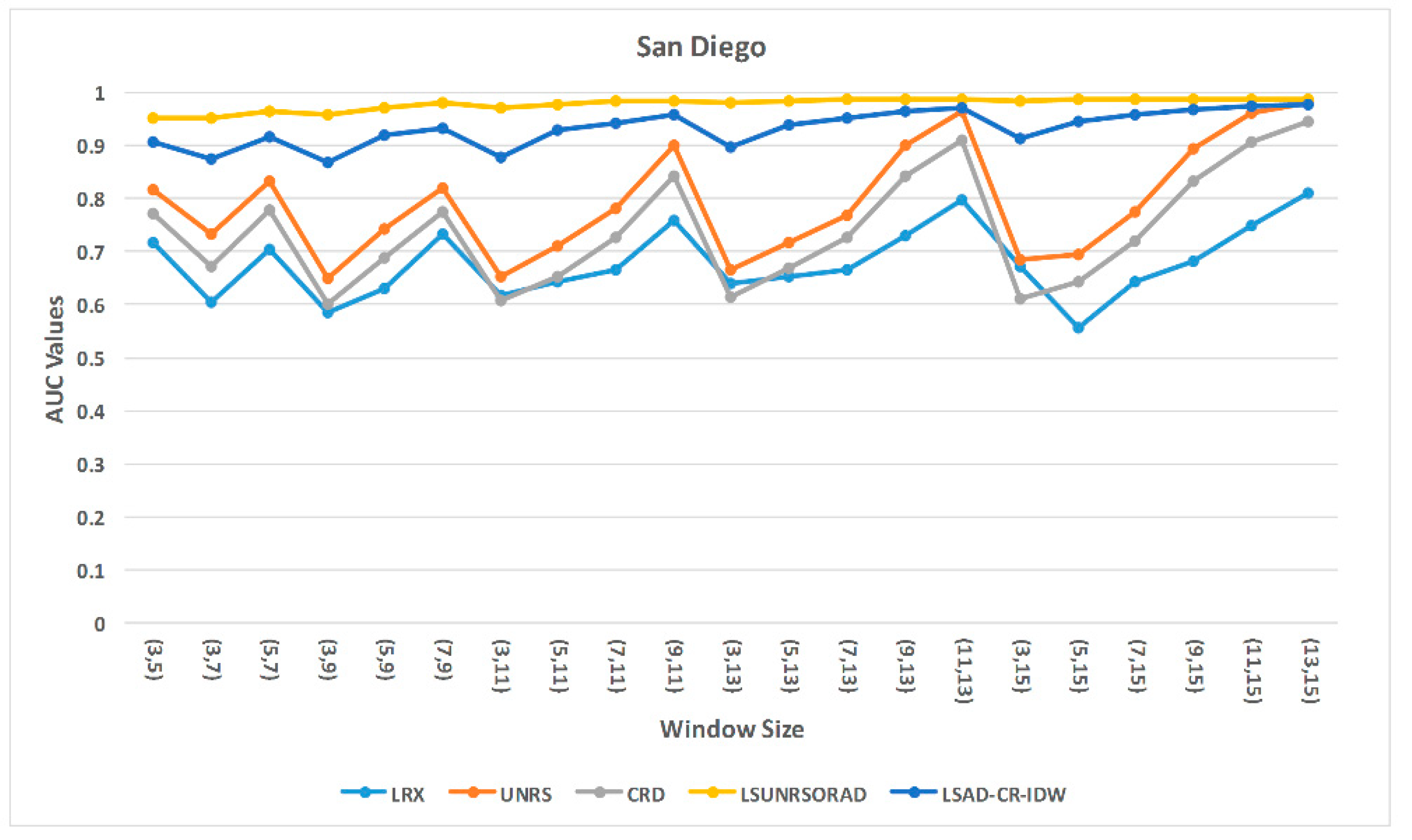
3.2.2. Parameter Analysis
3.2.3. Detection Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Niu, Y.; Wang, B. Hyperspectral anomaly detection based on low-rank representation and learned dictionary. Remote Sens. 2016, 8, 289. [Google Scholar] [CrossRef]
- Rejas Ayuga, J.G.; Martínez Marín, R.; Marchamalo Sacristán, M.; Bonatti, J.; Ojeda, J.C. Hyperspectral anomaly detection in urban scenarios. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 111–116. [Google Scholar] [CrossRef]
- Meuleman, K.; Coppin, P.; Debacker, S.; Debruyn, W.; Nackaerts, K.; Scheunders, P.; Sterckx, S. Optimal hyperspectral indicators for stress detection in orchards. In Proceedings of the 3rd EARSel Wokrshop on Imaging Spectroscopy, Herrsching, Germany, 13–16 May 2003; Volume 2010, pp. 1381–1382. [Google Scholar]
- Waheed, T.; Bonnell, R.B.; Prasher, S.O.; Paulet, E. Measuring performance in precision agriculture: CART—A decision tree approach. Agric. Water Manag. 2006, 84, 173–185. [Google Scholar] [CrossRef]
- Makki, I.; Younes, R.; Francis, C.; Bianchi, T.; Zucchetti, M. A survey of landmine detection using hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2017, 124, 40–53. [Google Scholar] [CrossRef]
- Bu, Z.; Yu, Z.; Huo, S. Research on oil pollution image classification of airborne hyperspectral data based on spectral angle analysis method. In Proceedings of the International Conference on Information Science and Engineering, Hangzhou, China, 4–6 December 2011; pp. 3946–3949. [Google Scholar]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. A kurtosis-based test to efficiently detect targets placed in close proximity by means of local covariance-based hyperspectral anomaly detectors. In Proceedings of the Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), 2011 3rd Workshop, Lisbon, Portugal, 6–9 June 2011; pp. 1–4. [Google Scholar]
- Molero, J.M.; Garzón, E.M.; García, I.; Plaza, A. Analysis and optimizations of global and local versions of the RX algorithm for anomaly detection in hyperspectral data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 801–814. [Google Scholar] [CrossRef]
- Taitano, Y.P.; Geier, B.A.; Bauer, K.W. A locally adaptable iterative RX detector. EURASIP J. Adv. Signal Proce. 2010, 11, 341908. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and linear filter-Based RXD: Improving background statistics estimation for anomaly detection in hyperspectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2351–2366. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Zhao, R.; Du, B.; Zhang, L.; Zhang, L. A robust background regression based score estimation algorithm for hyperspectral anomaly detection. ISPRS J. Photogramm. Remote Sens. 2016, 122, 126–144. [Google Scholar] [CrossRef]
- Wu, C.; Du, B.; Zhang, L. Hyperspectral anomalous change detection based on joint sparse representation. ISPRS J. Photogramm. Remote Sens. 2018, 146, 137–150. [Google Scholar] [CrossRef]
- Soofbaf, S.R.; Sahebi, M.R.; Mojaradi, B. A sliding window-based joint sparse representation (SWJSR) method for hyperspectral anomaly detection. Remote Sens. 2018, 10, 434. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Li, J.; Plaza, A.; Wei, Z. Anomaly detection in hyperspectral images based on low-rank and sparse representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1990–2000. [Google Scholar] [CrossRef]
- Li, W.; Du, Q. Collaborative representation for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1463–1474. [Google Scholar] [CrossRef]
- Vafadar, M.; Ghassemian, H. Hyperspectral anomaly detection using outlier removal from collaborative representation. In Proceedings of the International Conference on Pattern Recognition and Image Analysis, Shahrekord, Iran, 19–20 April 2017; pp. 13–19. [Google Scholar]
- Liu, W.M.; Chang, C.I. Multiple-window anomaly detection for hyperspectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 644–658. [Google Scholar] [CrossRef]
- Du, B.; Zhao, R.; Zhang, L.; Zhang, L. A spectral-spatial based local summation anomaly detection method for hyperspectral images. Signal Process. 2016, 124, 115–131. [Google Scholar] [CrossRef]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Compt. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Li, W.; Du, Q. Unsupervised nearest regularized subspace for anomaly detection in hyperspectral imagery. In Proceedings of the Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2014; pp. 1055–1058. [Google Scholar]
- Hanley, J.A.; Mcneil, B.J. The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 1982, 143, 29. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Tramel, E.W.; Prasad, S.; Fowler, J.E. Nearest regularized subspace for hyperspectral classification. IEEE Trans. Geosci. Remote Sens. 2013, 52, 477–489. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, Q.; Zhu, G. Fast hyperspectral anomaly detection via high-order 2-D crossing filter. IEEE Trans. Geosci. Remote Sens. 2014, 53, 620–630. [Google Scholar] [CrossRef]
- Hyperspectral Remote Sensing Scenes. Available online: http://www.ehu.eus/ccwintco/index.php?title=Hyperspectral_Remote_Sensing_Scenes (accessed on 22 May 2019).
- Stefanou, M.S.; Kerekes, J.P. A method for assessing spectral image utility. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1698–1706. [Google Scholar] [CrossRef]
- Zhao, R.; Du, B.; Zhang, L. Hyperspectral anomaly detection via a sparsity score estimation framework. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3208–3222. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, B.; Zhang, L.; Wang, S. A low-rank and sparse matrix decomposition-based mahalanobis distance method for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1376–1389. [Google Scholar] [CrossRef]
- Du, B.; Zhang, L. Random-selection-based anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1578–1589. [Google Scholar] [CrossRef]
- Taghipour, A.; Ghassemian, H.; Mirzapour, F. Anomaly detection of hyperspectral imagery using differential morphological profile. In Proceedings of the 2016 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 1219–1223. [Google Scholar]
- Li, J.; Zhang, H.; Zhang, L.; Ma, L. Hyperspectral anomaly detection by the use of background joint sparse representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2523–2533. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Tao, D.; Huang, X. Sparse transfer manifold embedding for hyperspectral target detection. IEEE Trans. Geosci. Remote Sens. 2013, 52, 1030–1043. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Xiao, F.; Zhan, T.; Wei, Z. A target detection method based on low-rank regularized least squares model for hyperspectral images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1129–1133. [Google Scholar] [CrossRef]
- Vafadar, M.; Ghassemian, H. Hyperspectral anomaly detection using modified principal component analysis reconstruction error. In Proceedings of the Iranian Conference on Electrical Engineering, Tehran, Iran, 2–4 May 2017; pp. 1741–1746. [Google Scholar]
- Ling, Q.; Guo, Y.; Lin, Z.; An, W. A constrained sparse representation model for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2358–2371. [Google Scholar] [CrossRef]
- Zhu, L.; Wen, G. Hyperspectral anomaly detection via background estimation and adaptive weighted sparse representation. Remote Sens. 2018, 10, 272. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | UNRS | CRD | LSUNRSORAD | LSAD-CR-IDW | |
|---|---|---|---|---|---|
| 0.01 | 0.92497 | 0.92712 | 0.99999 | 0.99998 | |
| 0.1 | 0.92497 | 0.92712 | 0.99996 | 0.99998 | |
| 1 | 0.92496 | 0.92712 | 0.99985 | 0.99994 | |
| 10 | 0.92496 | 0.92712 | 0.99952 | 0.99993 | |
| 100 | 0.92491 | 0.92712 | 0.99925 | 0.99988 | |
| Methods | Parameters |
|---|---|
| GRX | — |
| LRX | , |
| UNRS | , , and |
| CRD | , , and |
| LSAD | |
| LSUNRSORAD | , , and |
| LSAD-CR-IDW | , , and |
| Method | GRX | LRX | UNRS | CRD | LSAD | LSUNRSORAD | LSAD-CR-IDW |
|---|---|---|---|---|---|---|---|
| AUC | 0.80732 | 0.99160 | 0.92497 | 0.92712 | 0.99987 | 0.99999 | 0.99998 |
| Time/s | 0.59 | 190.01 | 8.7 | 11.7 | 2603.4 | 76.08 | 65.15 |
| Method | UNRS | CRD | LSUNRSORAD | LSAD-CR-IDW | |
|---|---|---|---|---|---|
| Datasets | |||||
| San Diego | 0.01 | 100 | 100 | 100 | |
| Pavia | 100 | 100 | 100 | 100 | |
| Hyspex | 0.01 | 0.01 | 0.1 | 100 |
| Dataset | GRX | LRX | UNRS | CRD | LSAD | Method1 | Method2 | |
|---|---|---|---|---|---|---|---|---|
| San Diego | AUC | 0.73369 | 0.71684 | 0.8173 | 0.77195 | 0.79681 | 0.91284 | 0.9073 |
| Time /(s) | 1.15 | 336.03 | 13.81 | 14.28 | 5120.27 | 154.02 | 133.74 | |
| Pavia | AUC | 0.99553 | 0.94957 | 0.98489 | 0.97960 | 0.95954 | 0.99862 | 0.99931 |
| Time /(s) | 0.53 | 71.78 | 9.42 | 9.41 | 1178.55 | 125.49 | 106.17 | |
| HySpex | AUC | 0.83484 | 0.76179 | 0.74988 | 0.81177 | 0.73731 | 0.83955 | 0.86486 |
| Time /(s) | 0.86 | 257.99 | 10.19 | 10.62 | 3996.17 | 161.60 | 122.07 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, K.; Hou, Z.; Wu, F.; Du, Q.; Chen, Y. Anomaly Detection for Hyperspectral Imagery Based on the Regularized Subspace Method and Collaborative Representation. Remote Sens. 2019, 11, 1318. https://doi.org/10.3390/rs11111318
Tan K, Hou Z, Wu F, Du Q, Chen Y. Anomaly Detection for Hyperspectral Imagery Based on the Regularized Subspace Method and Collaborative Representation. Remote Sensing. 2019; 11(11):1318. https://doi.org/10.3390/rs11111318
Chicago/Turabian StyleTan, Kun, Zengfu Hou, Fuyu Wu, Qian Du, and Yu Chen. 2019. "Anomaly Detection for Hyperspectral Imagery Based on the Regularized Subspace Method and Collaborative Representation" Remote Sensing 11, no. 11: 1318. https://doi.org/10.3390/rs11111318
APA StyleTan, K., Hou, Z., Wu, F., Du, Q., & Chen, Y. (2019). Anomaly Detection for Hyperspectral Imagery Based on the Regularized Subspace Method and Collaborative Representation. Remote Sensing, 11(11), 1318. https://doi.org/10.3390/rs11111318