Probability Index of Low Stratus and Fog at Dawn using Dual Geostationary Satellite Observations from COMS and FY-2D near the Korean Peninsula


Abstract
:1. Introduction
2. Materials and Methods
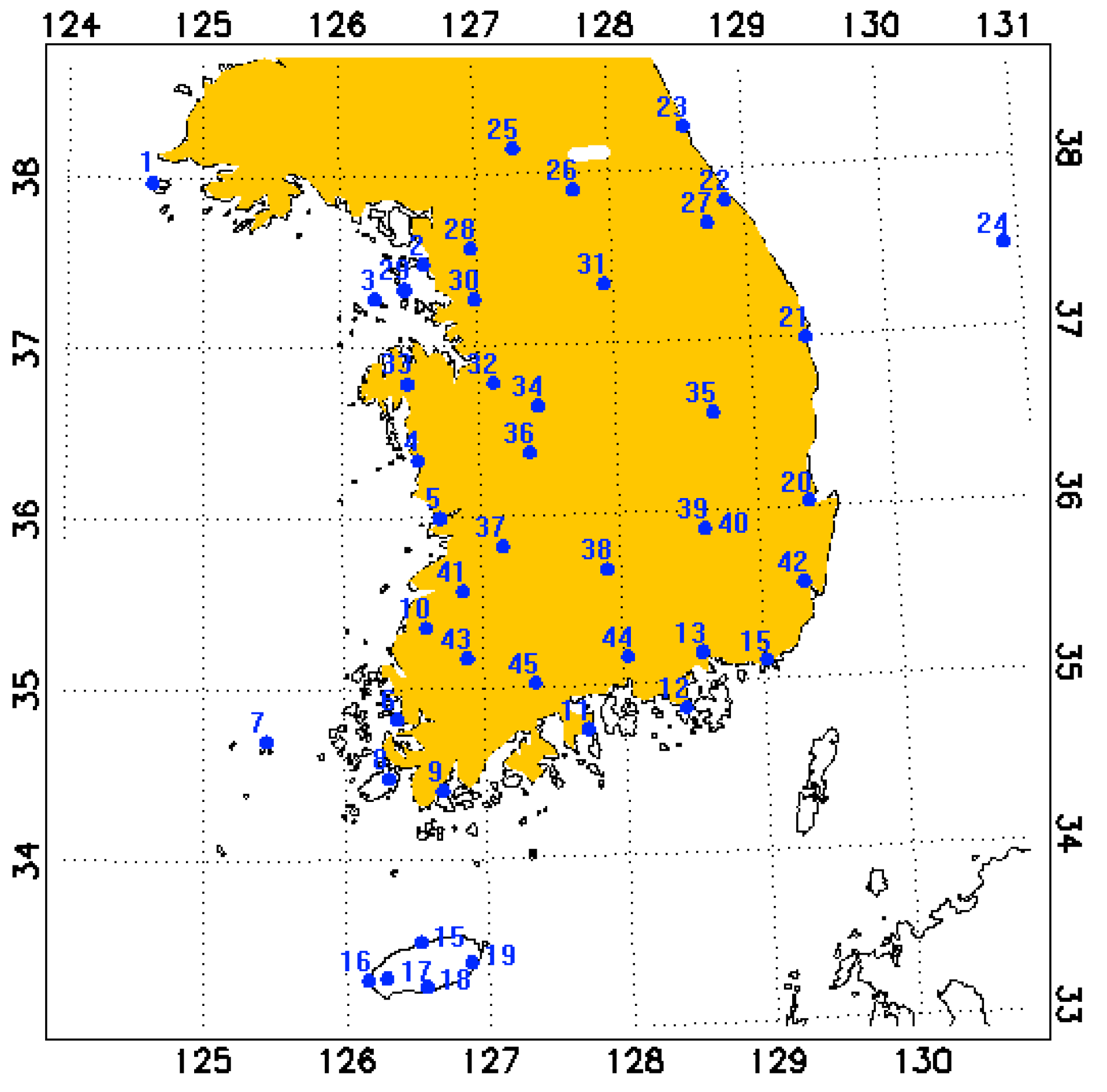
2.1. Satellite and Ground-Based Observations
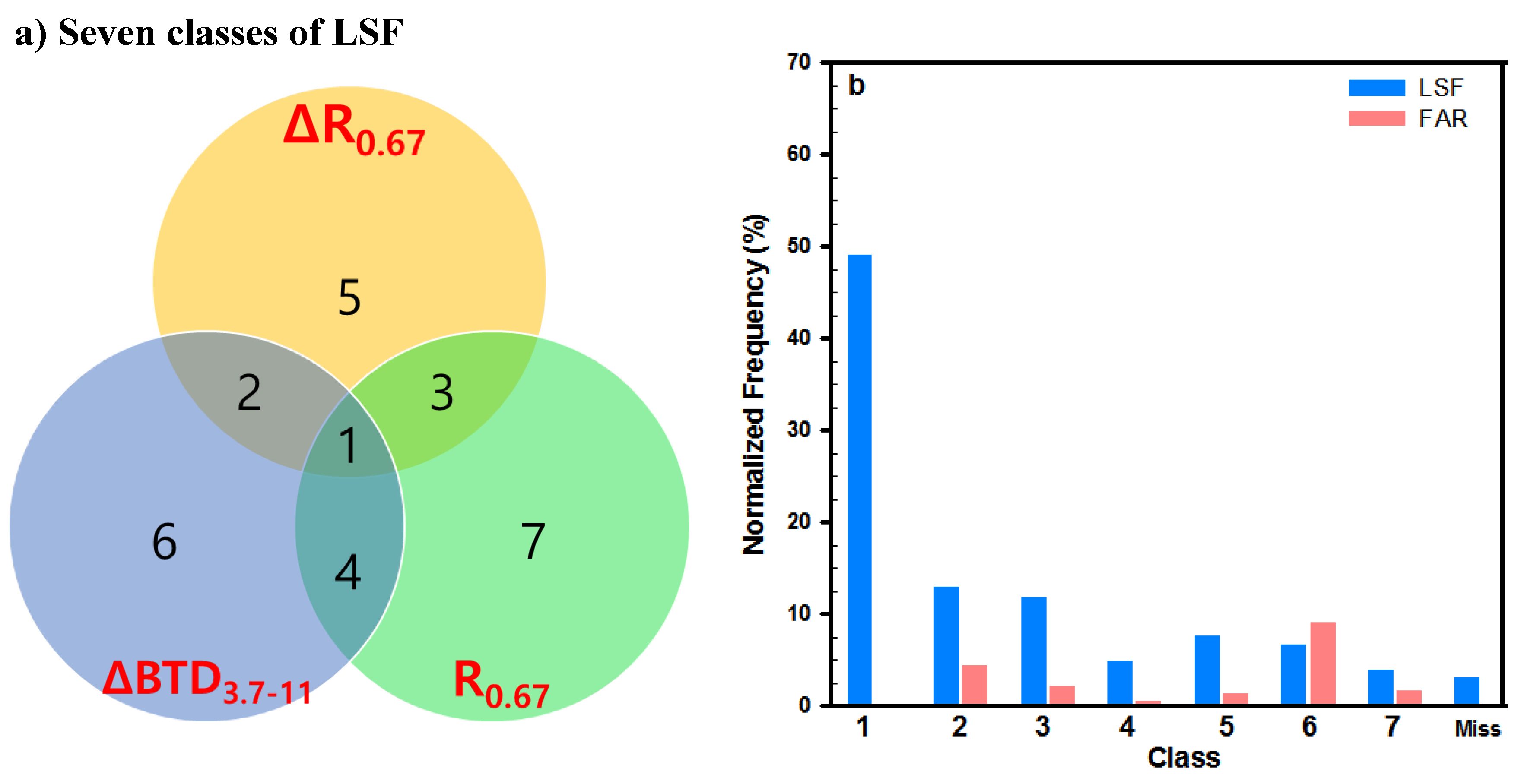
2.2. Probability Index Formulation from Past Fog Observations
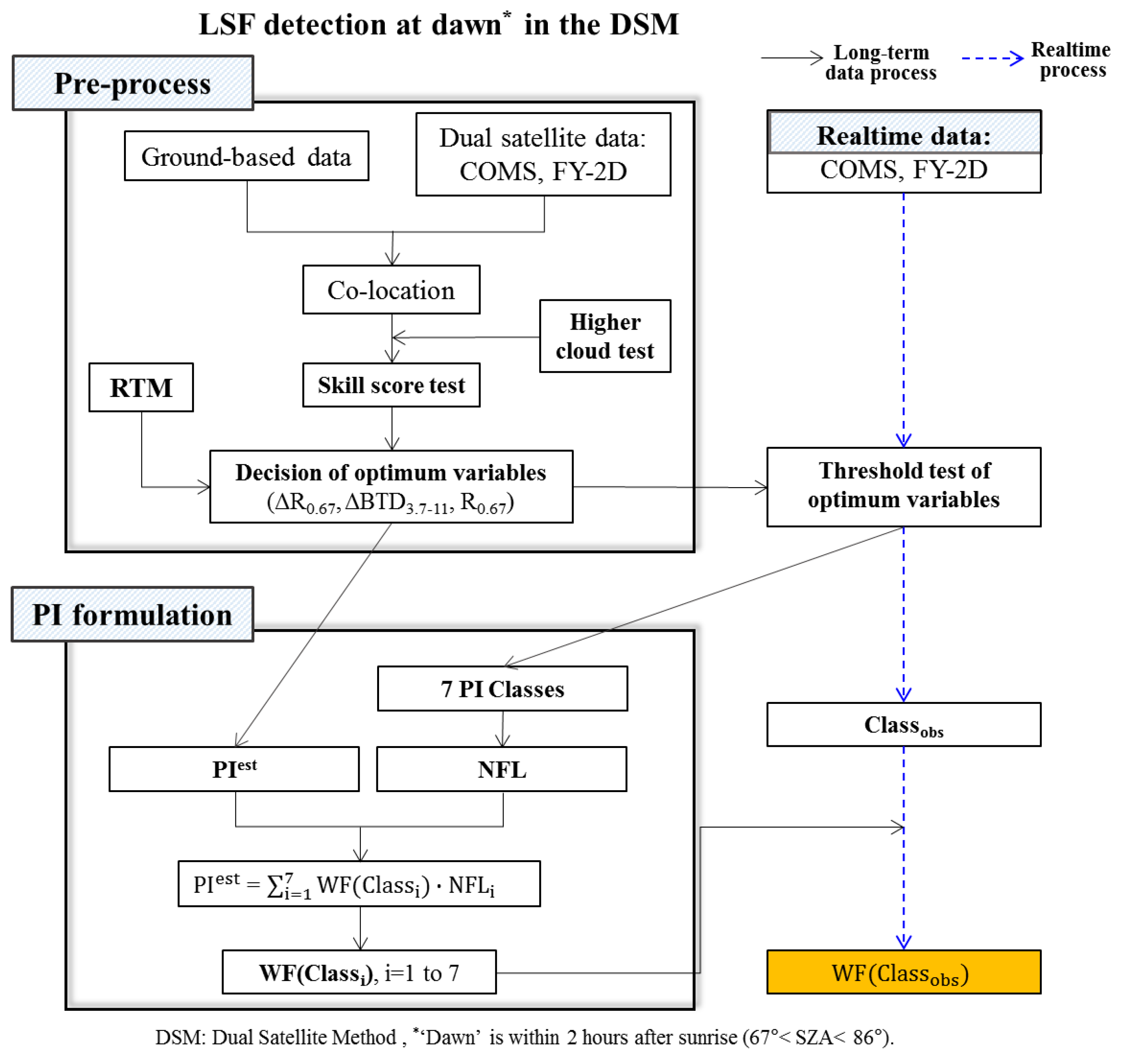
2.3. The Near-Realtime LSF PI Retrieval Scheme
3. Results
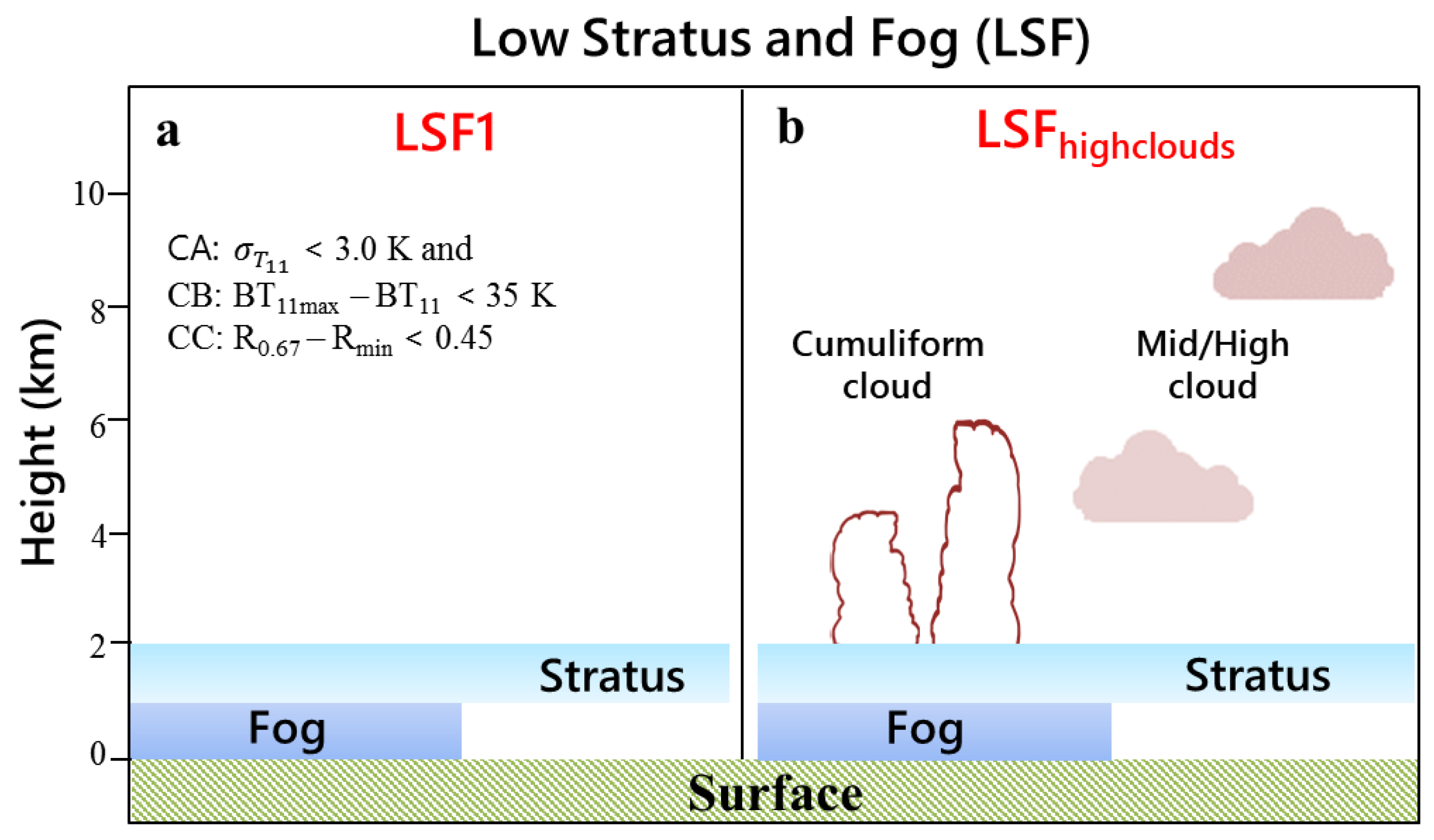
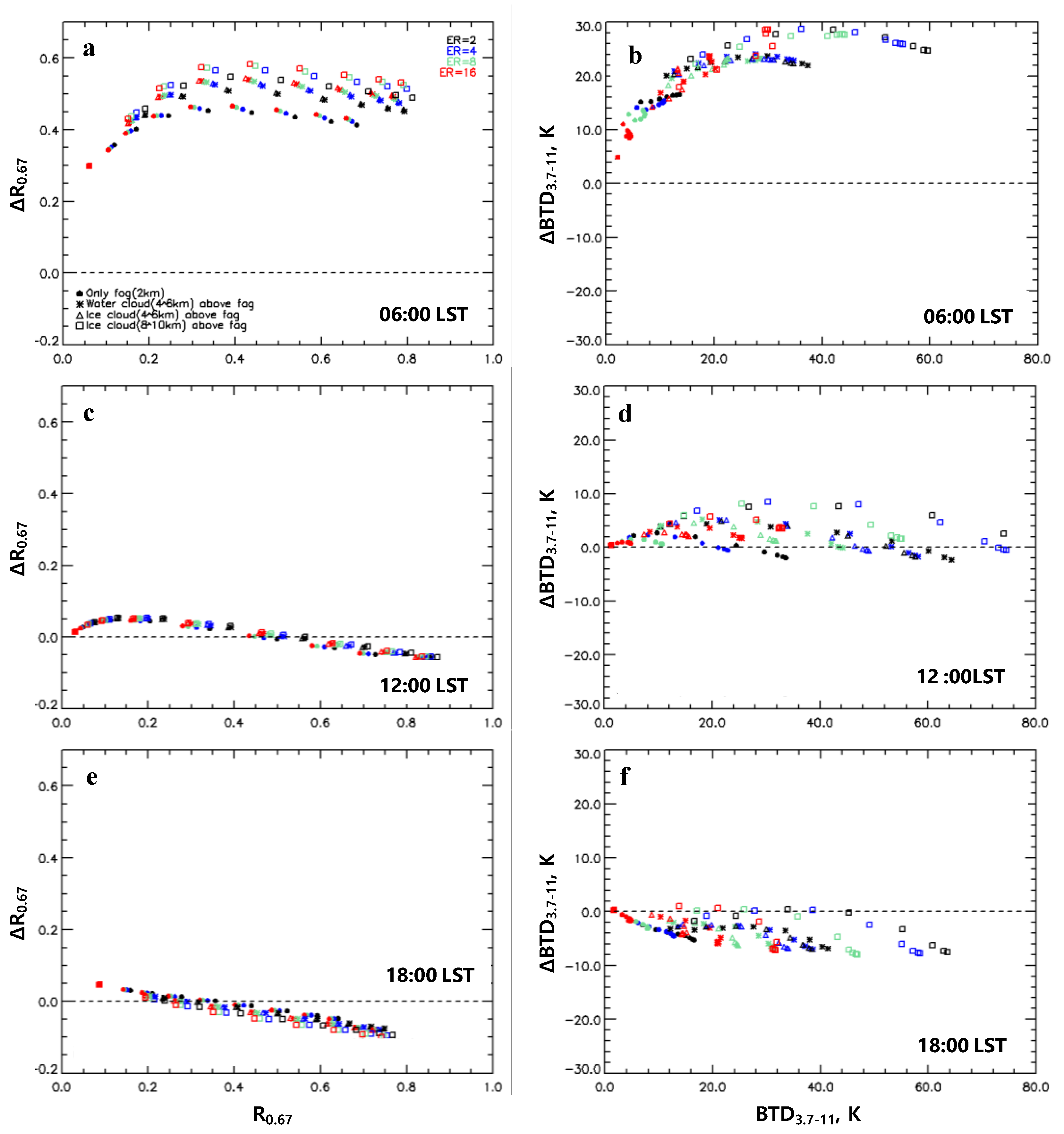
3.1. RTM Simulation for LSF
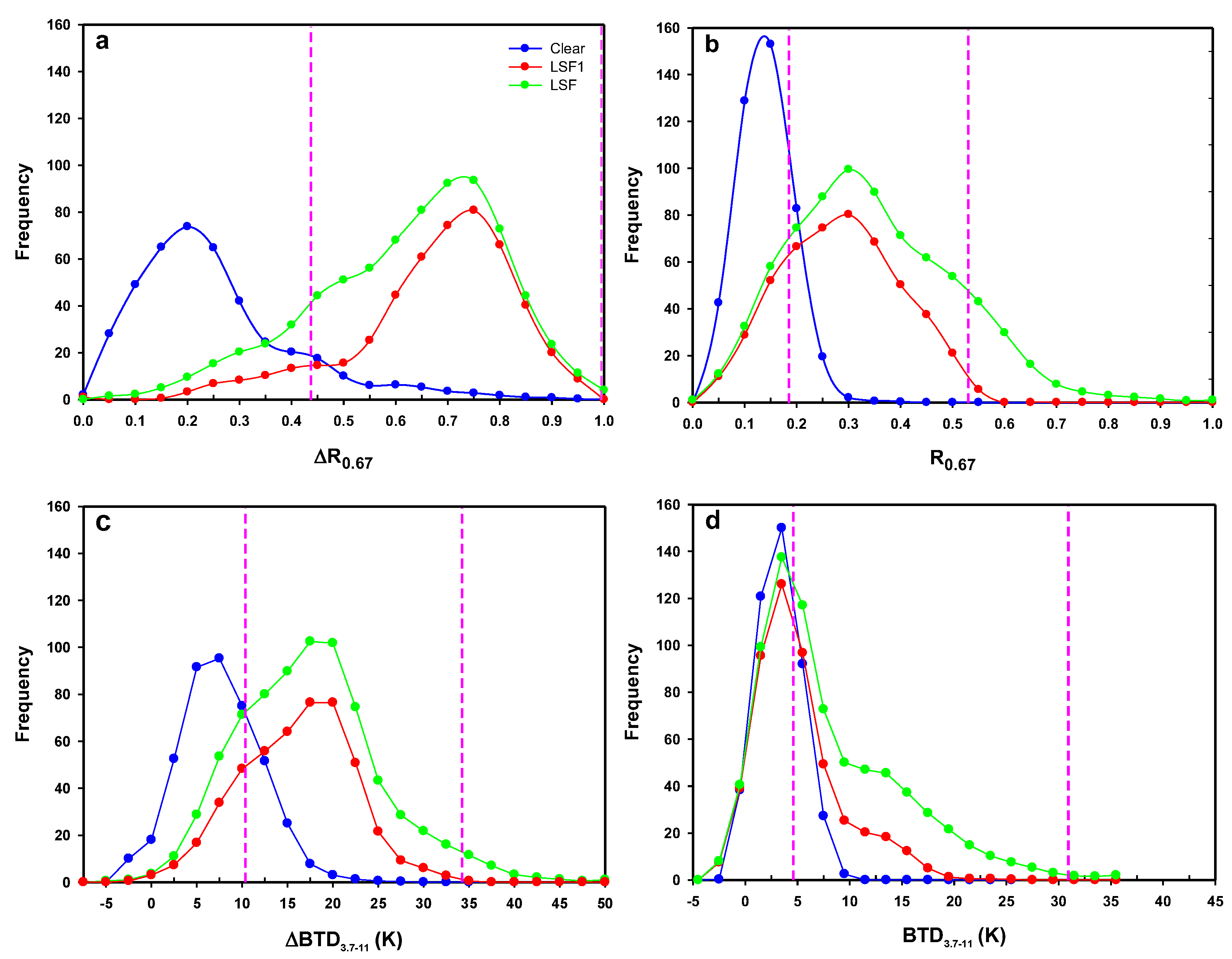
3.2. Optimum Thresholds for LSF Detection
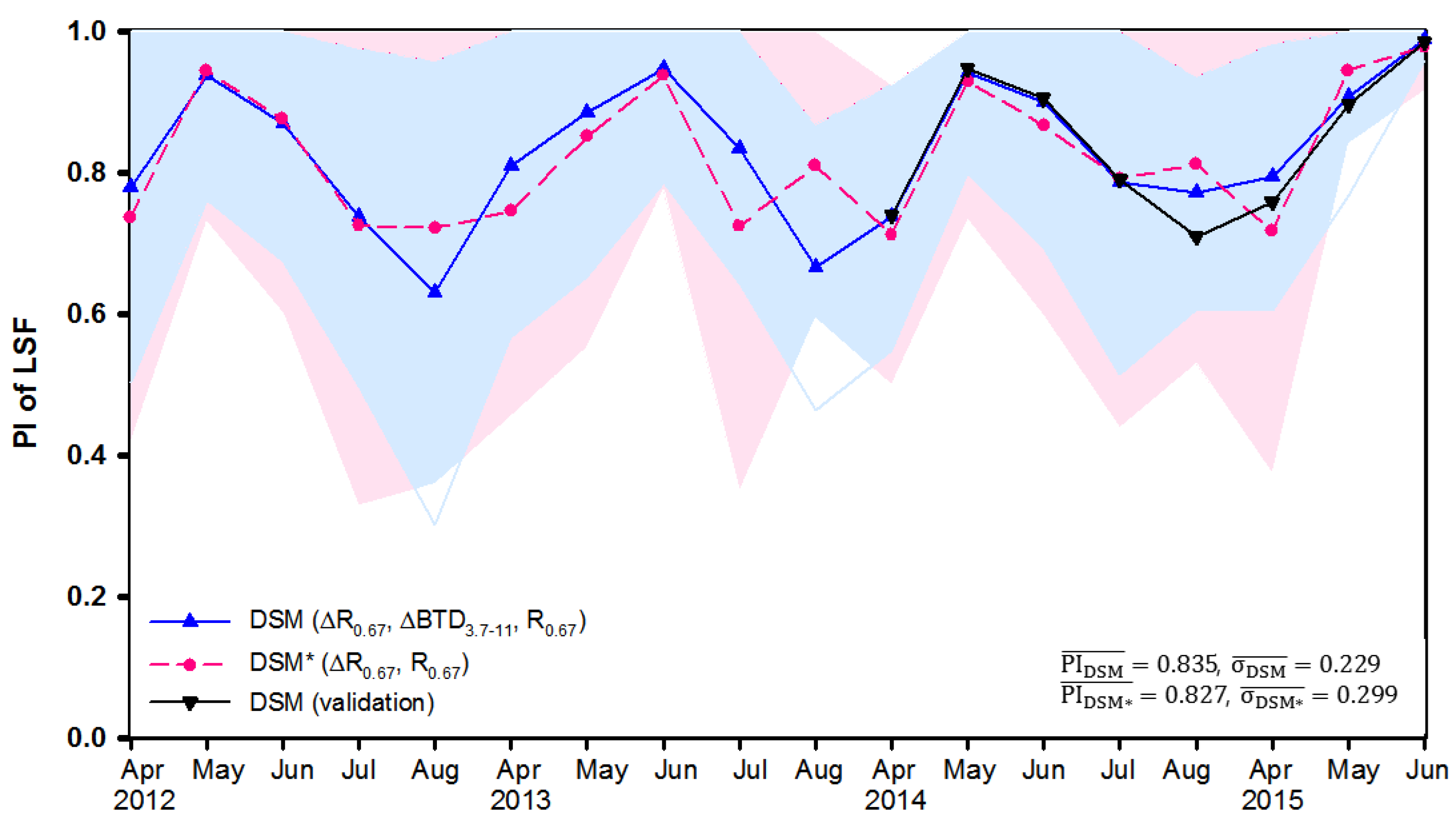
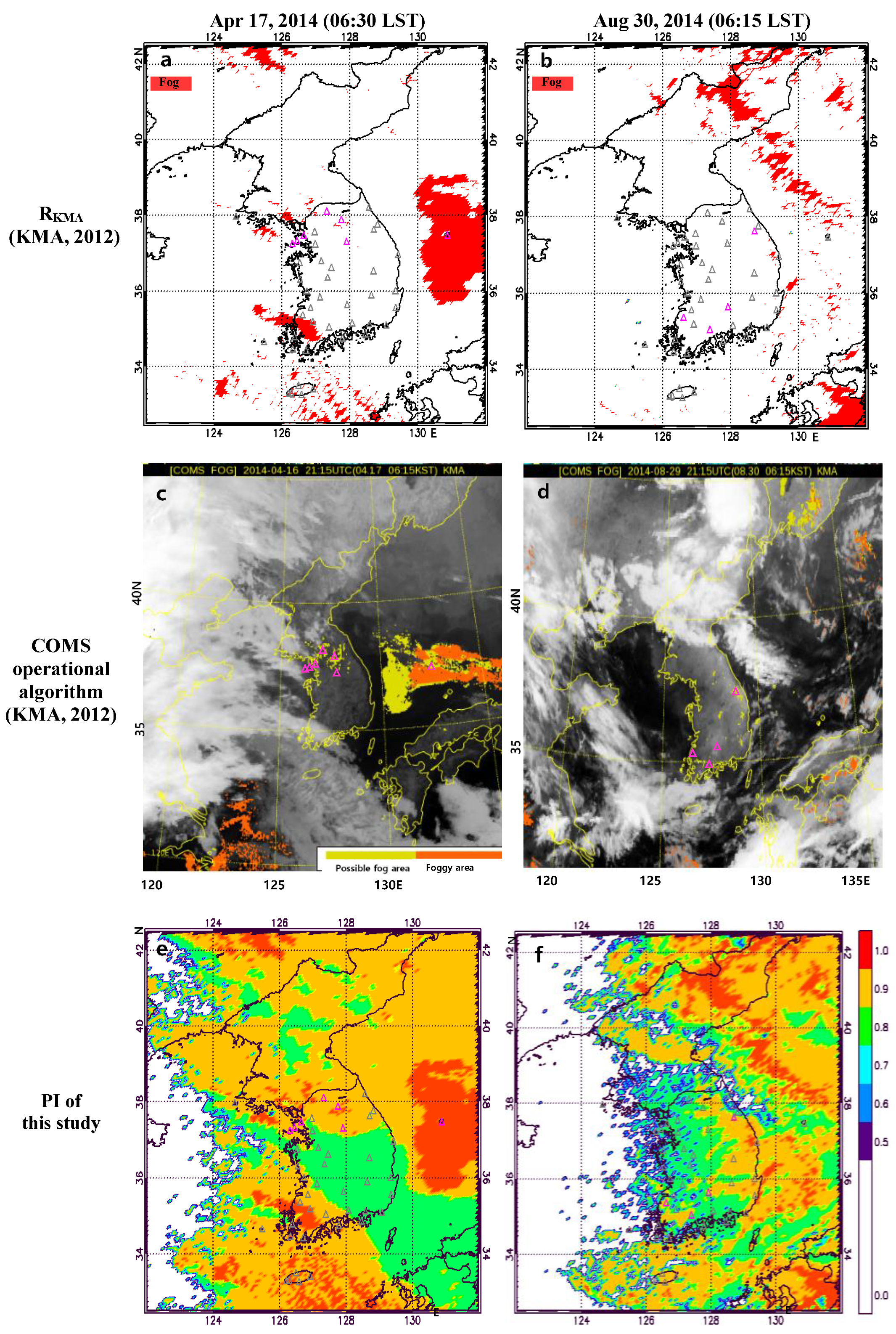
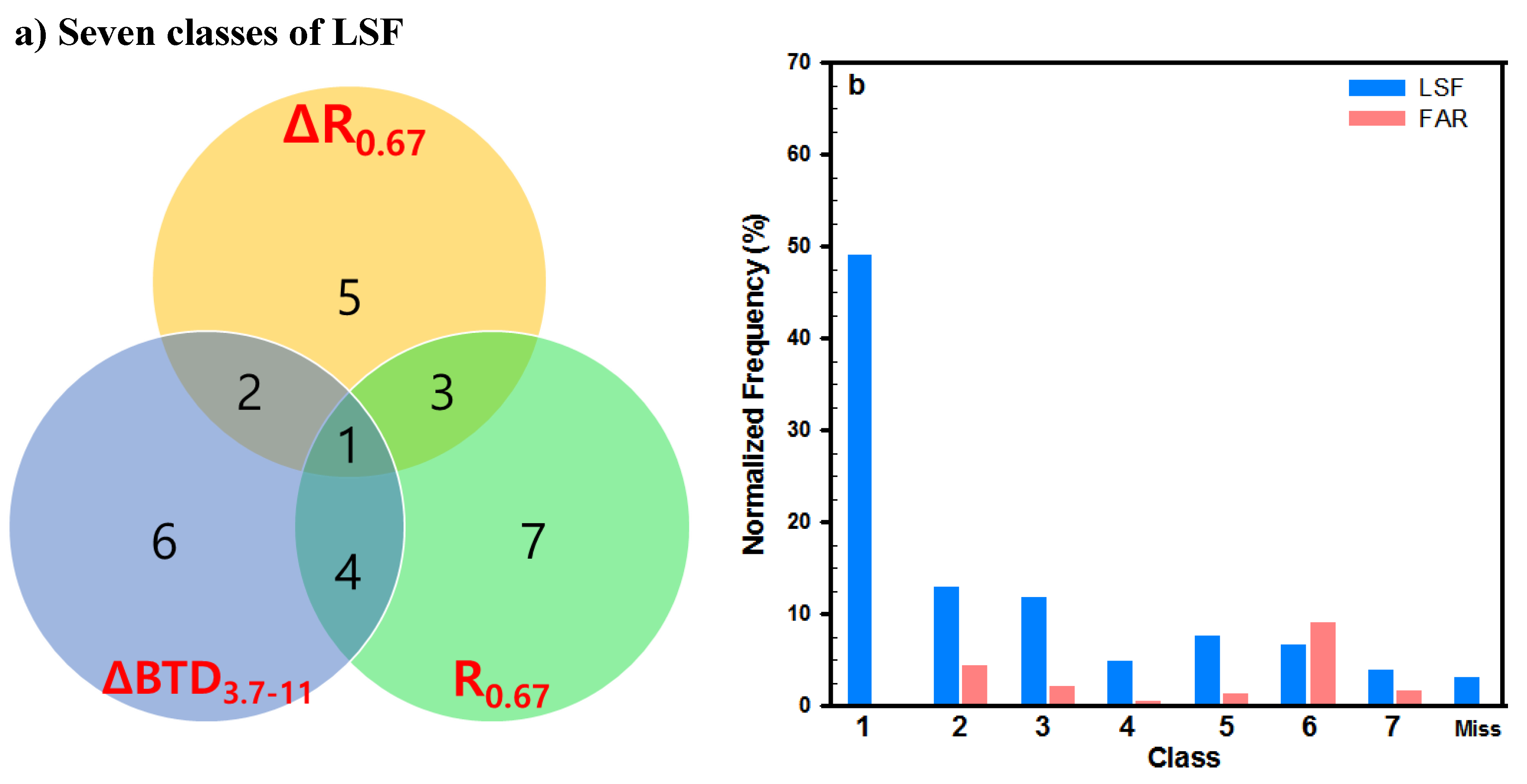
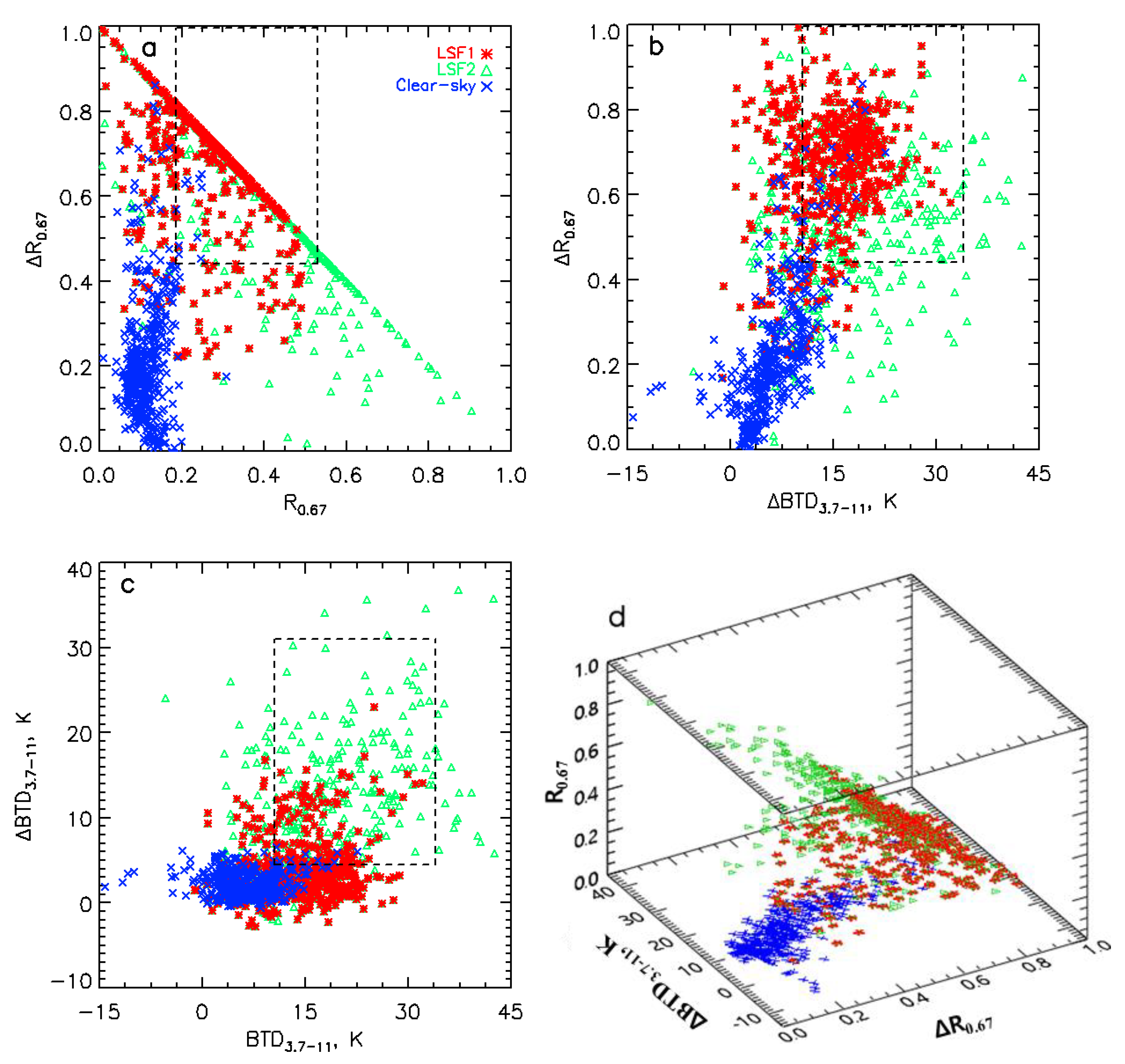
3.3. Probability Index for Improved LSF Detection
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Original Words (or Details) | Acronyms | Original Words (or Details) |
|---|---|---|---|
| AVHRR | Advanced Very High Resolution Radiometer | KMA | Korea meteorological administration |
| BT11 | brightness temperature at ~11 μm | LSF | low stratus and fog |
| BT11max | maximum value of BT11 over the region (122–132°E, 32.5–42.5°N) | LUT | look-up table |
| BT3.7 | brightness temperature at ~3.7 μm | MODIS | Moderate Resolution Imaging Spectroradiometer |
| BTD | brightness temperature difference | NFL | normalized frequency of LSF |
| BTD11-6.7 | brightness temperature difference between 11 μm and 6.7 μm | OBS | observation |
| BTD3.7-11 | difference between BT3.7 and BT11 | PC | percentage correct |
| BTD6.2-11 | difference between BT6.2 and BT11 | PI | probability index |
| BTDKMA | threshold for fog detection used at KMA (2012) | POD | probability of detection |
| CER | cloud effective radius | R0.67 | reflectance at ~0.67 μm |
| CH | cloud height | RAA | relative azimuth angle |
| COMS | Korean Communication, Ocean and Meteorological Satellite | RKMA | threshold for fog detection used at KMA (2012) |
| COT | cloud optical thickness | Rmin | minimum value of R0.67 over the region (122–132°E, 32.5–42.5°N) |
| CSI | critical success index | RTM | radiative transfer model |
| DSM | dual satellite method | SBDART | Santa Barbara DISORT Atmospheric Radiative Transfer |
| ER | effective radius | SEVIRI | Spinning Enhanced Visible and Infrared Imager |
| FAR | false alarm ratio | SNR | signal-to-noise |
| FER | fog effective radius | SRF | spectral response function |
| FH | fog height | SWIR | shortwave infrared at ~3.7 μm |
| FOT | fog optical thickness | SYNOP | surface synoptic observations |
| FY-2D | Chinese FengYun-2D | SZA | solar zenith angle |
| GEO | geostationary-orbit satellite | VZA | satellite viewing zenith angle |
| GTS | global telecommunications system | VIS | visible |
| HR | hit rate | ΔR0.67 | difference in R0.67 between two satellites |
| HSS | Heidke skill score | ΔBTD3.7-11 | difference in BTD3.7-11 between two satellites |
| IR1 | infrared at ~11 μm | standard deviation at BT11 over the 3 × 3 grid-pixel area | |
| IR2 | infrared at ~12 μm |
| Station Number | Coastal Station | Lat (°N) | Lon (°E) | Height (m) | Station Number | Inland Station | Lat (°N) | Lon (°E) | Height (m) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Baengnyeongdo | 37.97 | 124.63 | 145 | 24 | Ulleungdo | 37.48 | 130.90 | 223 |
| 2 | Incheon | 37.48 | 126.62 | 68 | 25 | Cheorwon | 38.15 | 127.30 | 154 |
| 3 | Incheon Airport | 37.28 | 126.26 | N/A | 26 | Chuncheon | 37.90 | 127.74 | 78 |
| 4 | Boryeong | 36.33 | 126.56 | 15 | 27 | Daeguallyeong | 37.68 | 128.72 | 773 |
| 5 | Gunsan | 35.99 | 126.71 | 26 | 28 | Seoul | 37.57 | 126.97 | 86 |
| 6 | Mokpo | 34.82 | 126.38 | 38 | 29 | Gimpo Airport | 37.33 | 126.48 | N/A |
| 7 | Heuksando | 34.69 | 125.45 | 76 | 30 | Suwon | 37.27 | 126.99 | 34 |
| 8 | Jindo | 34.47 | 126.32 | 476 | 31 | Wonju | 37.34 | 127.95 | 149 |
| 9 | Wando | 34.40 | 126.70 | 35 | 32 | Cheonan | 36.78 | 127.12 | 21 |
| 10 | Gochang | 35.35 | 126.60 | 52 | 33 | Seosan | 36.78 | 126.49 | 29 |
| 11 | Yeosu | 34.74 | 127.74 | 65 | 34 | Cheongju | 36.64 | 127.44 | 57 |
| 12 | Tongyeong | 34.85 | 128.44 | 33 | 35 | Andong | 36.57 | 128.71 | 139 |
| 13 | Changwon | 35.17 | 128.57 | 37 | 36 | Daejeon | 36.37 | 127.37 | 69 |
| 15 | Busan | 35.11 | 129.03 | 70 | 37 | Jeonju | 35.82 | 127.16 | 53 |
| 15 | Jeju | 33.51 | 126.53 | 20 | 38 | Geochang | 35.67 | 127.91 | 226 |
| 16 | Gosan | 33.29 | 126.16 | 74 | 39 | Daegu | 35.89 | 128.62 | 64 |
| 17 | Jeju Airport | 33.30 | 126.29 | N/A | 40 | Daegu(kma) | 35.89 | 128.62 | 64 |
| 18 | Seogwipo | 33.25 | 126.57 | 50 | 41 | Jeongeup | 35.56 | 126.87 | 45 |
| 19 | Seongsan | 33.39 | 126.88 | 18 | 42 | Ulsan | 35.56 | 129.32 | 35 |
| 20 | Pohang | 36.03 | 129.38 | 2 | 43 | Gwangju | 35.17 | 126.89 | 72 |
| 21 | Uljin | 36.99 | 129.41 | 50 | 44 | Jinju | 35.16 | 128.04 | 30 |
| 22 | Bukgangneung | 37.81 | 128.86 | 79 | 45 | Suncheon | 35.02 | 127.37 | 165 |
| 23 | Sokcho | 38.25 | 128.57 | 18 |
| SYNOP | |||
|---|---|---|---|
| Fog | Clear-Sky | ||
| COMS only | Fog | a | b |
| Clear-sky | c | d | |
| CSI = FAR = HSS = PC = POD = | |||
| Input Variable | Contents |
|---|---|
| Atmospheric profile | Mid-latitude summer, US62 |
| Wavelength (λ): Three channels of VIS, SWIR, & IR1 for COMS & FY-2D | 0.55–0.90, 3.5–4.0, 10.3–11.3 μm |
| Solar Zenith Angle (SZA) | 0 at 10 intervals, and 85 |
| Surface type | Ocean, Vegetation |
| Fog Height (FH) | Water fog at 0–1 km or 0–2 km |
| Upper Cloud Height (CH) above the fog layer | Water/ice cloud (4–6 km), Ice cloud (8–10 km) |
| Fog Optical Thickness (FOT) | 0, 0.5, 1, 2, 4, 8, 16, 32, 64 |
| Cloud Optical Thickness (COT) | 0, 4, 8, 16, 32 |
| Effective Radius of fog (FER) | 4, 8, 16, 32 μm |
| Effective Radius of cloud (CER) | 2, 4, 8, 16 μm |
| Flux computation stream | 32 |
| Vertical resolution | 1 km |
| Viewing Zenith Angle (VZA) | 0 at 10 intervals |
| Relative Azimuth Angle (RAA) | 0 at 30 intervals |
| Boundary layer aerosol type | Urban |
| Vertical optical depth of boundary layer aerosols nominally at 0.55 μm | 0.2 |
| Period | LSF | LSF1 | LSFhighclouds |
|---|---|---|---|
| Period 1 (2012–2013) | 470 (100%) | 296 (63%) | 174 (37%) |
| Period 2 (2014–2015) | 284 (100%) | 177 (62%) | 107 (38%) |
References
- Ahrens, C.D. An Introduction to Weather, Climate, and the Environment, 8th ed.; Brooks/Cole: Belmont, CA, USA, 2007; p. 23. [Google Scholar]
- Egli, S.; Thies, B.; Bendix, J. A hybrid approach for fog retrieval based on a combination of satellite and ground truth data. Remote Sens. 2018, 10, 628. [Google Scholar] [CrossRef]
- Cermak, J.; Eastman, R.M.; Bendix, J.; Warren, S.G. European climatology of fog and low stratus based on geostationary satellite observations. Q. J. R. Meteorol. Soc. 2009, 135, 2125–2130. [Google Scholar] [CrossRef]
- Chaurasia, S.; Sathiyamoorthy, V.; Paul Shukla, B.; Simon, B.; Joshi, P.C.; Pal, P.K. Night time fog detection using MODIS data over northern India. Meteor. Appl. 2011, 18, 483–494. [Google Scholar] [CrossRef]
- Zhang, S.; Yi, L. A comprehensive dynamic threshold algorithm for daytime sea fog retrieval over the Chinese adjacent seas. Pure Appl. Geophys. 2013, 170, 1931–1944. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. Dynamical nighttime fog/low stratus detection based on Meteosat SEVIRI data: A feasibility study. Pure Appl. Geophys. 2007, 164, 1179–1192. [Google Scholar] [CrossRef]
- Ellord, G.P.; Gultepe, I. Inferring low cloud base heights at night for aviation using satellite infrared and surface temperature. Pure Appl. Geophys. 2007, 164, 1193–1205. [Google Scholar] [CrossRef]
- Yoo, J.M.; Choo, G.H.; Lee, K.H.; Wu, D.L.; Yang, J.H.; Park, J.D.; Choi, Y.S.; Shin, D.B.; Jeong, J.H.; Yoo., J.M. Improved detection of low stratus and fog at dawn from dual geostationary (COMS and FY–2D) satellites. Remote Sens. Environ. 2018, 211, 292–306. [Google Scholar] [CrossRef]
- Andersen, H.; Cermak, J.; Solodovnik, I.; Lelli, L.; Vogt, R. Spatiotemporal dynamics of fog and low clouds in the Namib unveiled with ground and space-based observations. Atmos. Chem. Phys. Discuss 2018. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Drönner, J.; Cermak, J.; Bendix, J. A 10 year fog and low stratus climatology for Europe based on Meteosat Second Generation data. Q. J. R. Meteorol. Soc. 2017, 143, 530–541. [Google Scholar] [CrossRef]
- Bendix, J. A satellite-based climatology of fog and low-level stratus in Germany and adjacent areas. Atmos. Res. 2002, 64, 3–18. [Google Scholar] [CrossRef]
- Musial, J.; Hüsler, F.; Sütterlin, M.; Neuhaus, C.; Wunderle, S. Daytime low stratiform cloud detection on AVHRR imagery. Remote Sens. 2014, 6, 5124–5150. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. A novel approach to fog/low stratus detection using meteosat 8 data. Atmos. Res. 2008, 87, 279–292. [Google Scholar] [CrossRef]
- Eyre, J.R.; Brownscomve, J.L.; Allam, R.J. Detection of fog at night using advanced very high resolution radiometer (AVHRR) imagery. Meteorol. Mag. 1984, 113, 266–271. [Google Scholar]
- Cermak, J.; Bendix, J. Fog/low stratus detection and discrimination using satellite data. In Proceedings of the COST722 Midterm Workshop on Short Range Forecasting Methods of Fog, Visibility and Low Clouds, Langen, Germany, 20 October 2005. [Google Scholar]
- Gultepe, I.; Pagowski, M.; Reid, J. A satellite-based fog detection scheme using screen air temperature. Weather Forecast. 2007, 22, 444–456. [Google Scholar] [CrossRef]
- Dybbroe, A. Automatic Detection of Fog at Night Using AVHRR Data. In Proceedings of the 6th AVHRR Data Users’ Meeting, Belgirate, Italy, 29 June–2 July 1993; pp. 245–252. [Google Scholar]
- Ellord, G.P. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Weather Forecast. 1995, 10, 606–619. [Google Scholar] [CrossRef]
- KMA, National Meteorological Satellite Center. Fog detection. In Algorithm Theoretical Basis Document, Fog-Version 1.0; KMA: Seoul, Korea, 2012. [Google Scholar]
- Kim, S.H.; Suh, M.S.; Han, J.H. Development of fog detection algorithm during nighttime using Himawari-8/AHI satellite and ground observation data. Asia-Pac. J. Atmos. Sci. 2018. [Google Scholar] [CrossRef]
- Shin, D.; Kim, J.H. A new application of unsupervised learning to nighttime sea fog detection. Asia-Pac. J. Atmos. Sci. 2018, 54, 527–544. [Google Scholar] [CrossRef]
- Yoo, J.M.; Jeong, M.J.; Hur, Y.M.; Shin, D.B. Improved fog detection from satellite in the presence of clouds. Asia-Pac. J. Atmos. Sci. 2010, 46, 29–40. [Google Scholar] [CrossRef]
- KMA, National Meteorological Satellite Center. Improving Retrieval Algorithm for Fog Detection Using COMS Observation Data; KMA: Seoul, Korea, 2015. [Google Scholar]
- Lee, T.F.; Turk, F.J.; Richardson, K. Stratus and fog products using GOES-8-9 3.9-µm data. Weather Forecast. 1997, 12, 664–677. [Google Scholar] [CrossRef]
- Turk, J.; Vivekanandan, J.; Lee, T.; Durkee, P.; Nielsen, K. Derivation and applications of near-infrared cloud reflectances from GOES-8 and GOES-9. Bull. Amer. Meteor. Soc. 1998, 37, 819–831. [Google Scholar]
- Schreiner, A.J.; Ackerman, S.A.; Baum, B.A.; Heidinger, A.K. A multispectral technique for detecting low-level cloudiness near sunrise. J. Atmos. Ocean. Tec. 2007, 24, 1800–1810. [Google Scholar] [CrossRef]
- Lee, J.; Chung, C.; Ou, M. Fog detection using geostationary satellite data: Temporally continuous algorithm. A. Pac. J. Atmos. Sci. 2011, 47, 113–122. [Google Scholar] [CrossRef]
- Ishida, H.; Miura, K.; Matsuda, T.; Ogawara, K.; Goto, A.; Matsuura, K.; Sato, Y.; Nakajima, T.Y. Investigation of low-cloud characteristics using mesoscale numerical model data for improvement of fog-detection performance by satellite remote sensing. J. Appl. Meteorol. Climatol. 2014, 53, 2246–2263. [Google Scholar] [CrossRef]
- National Meteorological Satellite Center of KMA. Available online: http://nmsc.kma.go.kr/html/homepage/ko/chollian/choll_img.do (accessed on 23 March 2019).
- National Satellite Meteorological Center of CMA. Available online: http://www.nsmc.org.cn/en/NSMC/Contents/Instruments_VISSR-II.html (accessed on 23 March 2019).
- Wu, X.; Li, S.; Liao, M.; Cao, Z.; Wang, L.; Zhu, J. Analyses of seasonal feature of sea fog over the Yellow Sea and Bohai Sea based on the recent 20 years of satellite remote sensing data. Haiyang Xuebao 2015, 37, 63–72. [Google Scholar]
- data.kma.go.kr. Available online: https://data.kma.go.kr/data/grnd/selectAsosRltmList.do?pgmNo=36 (accessed on 23 March 2019).
- data.kma.go.kr. Available online: https://data.kma.go.kr/data/rmt/rmtList.do?code=372&pgmNo=568 (accessed on 23 March 2019).
- Ricchiazzi, P.; Yang, S.; Gautier, C.; Sowle, D. SBDART: A research and teaching software tool for plane-parallel radiative transfer in the Earth’s atmosphere. Bull. Amer. Meteor. Soc. 1998, 79, 2101–2114. [Google Scholar] [CrossRef]
- Yoo, J.M.; Jeong, M.J.; Yun, M.Y. Optical properties of fog from satellite observation (MODIS) and numerical simulation. Asia-Pac. J. Atmos. Sci. 2006, 42, 291–305. [Google Scholar]
- Liou, K.N. Radiation and Cloud Processes in the Atmosphere: Theory, Observations, and Modeling, Oxford Monographs on Geology and Geophysics No. 20; Oxford University Press: New York, NY, USA, 1992; pp. 104–105. [Google Scholar]
- von Storch, H.; Zwiers, F.W. Statistical Analysis in Climate Research; Cambridge University Press: Cambridge, UK, 1999; 405p. [Google Scholar]
- Cermak, J.; Bendix, J. Detecting ground fog from space–A microphysics-based approach. Int. J. Remote Sens. 2011, 32, 3345–3371. [Google Scholar] [CrossRef]
- Chaurasia, S.; Gohil, B.S. Detection of day time fog over India using INSAT-3D data. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2015, 8, 4524–4530. [Google Scholar] [CrossRef]
- National Meteorological Satellite Center of KMA. Available online: http://nmsc.kma.go.kr/html/homepage/en/ver2/static/selectStaticPage.do?view=satellites.gk2a.gk2aIntro (accessed on 23 March 2019).
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the new generation of Chinese geostationary weather satellites, Fengyun-4. Bull. Amer. Meteor. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An introduction to Himawari-8/9-Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef]
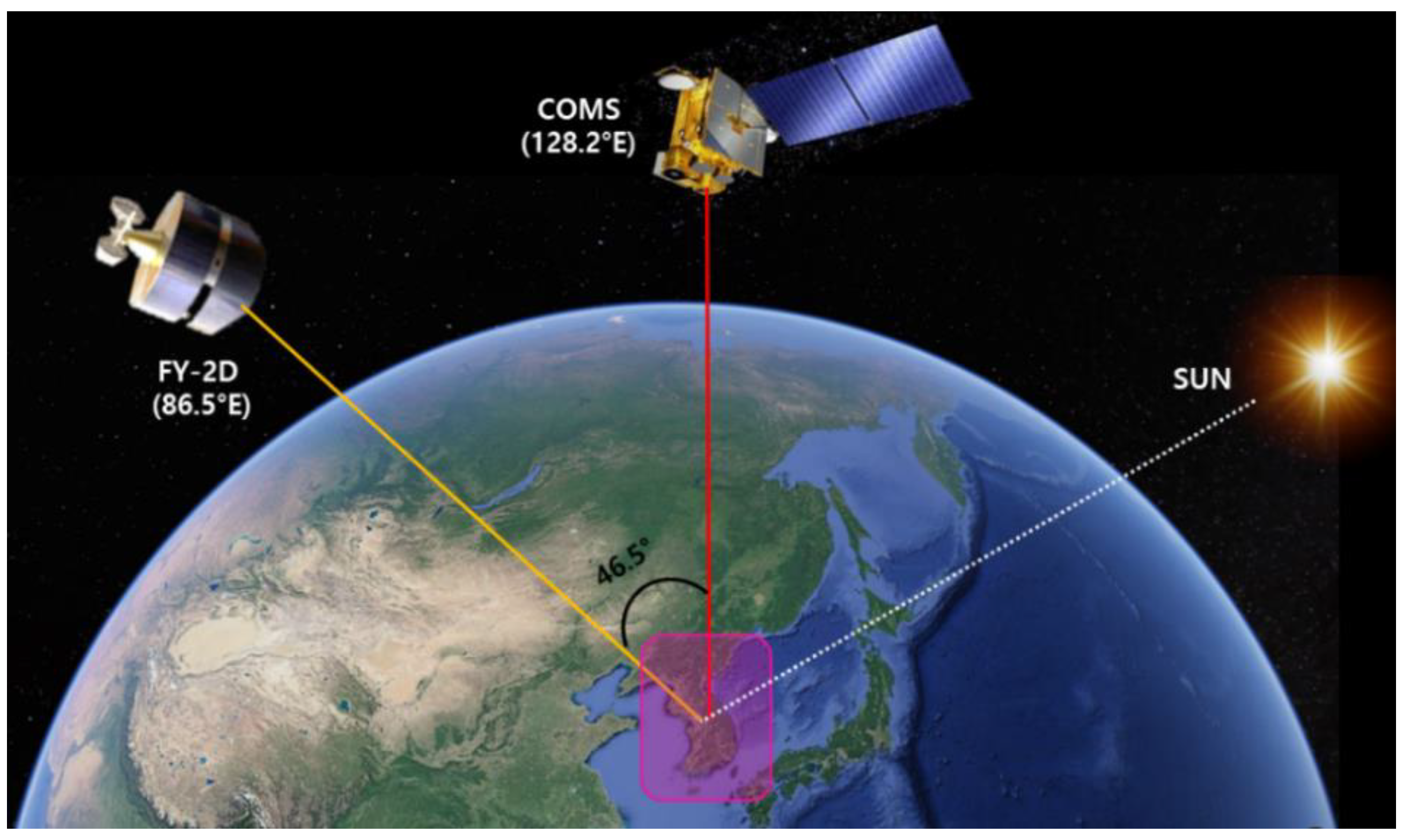






| Satellite | Longitude (°E) | Altitude (km) | Launch Date | VIS (μm) | SWIR (μm) | IR1 (μm) | Central Wavelength (μm) | Spatial Resolution (km) |
|---|---|---|---|---|---|---|---|---|
| COMS | 128.2 | 35,857 | 27 Jun 2010 | 0.55–0.80 | 3.5–4.0 | 10.3–11.3 | 0.675/3.75/10.8 | 1/4/4 |
| FY-2D | 86.5 | 35,786 | 15 Nov 2006 | 0.55–0.99 | 3.5–4.0 | 10.3–11.3 | 0.77/3.75/10.8 | 1.25/5/5 |
| Weather Phenomenon | Spring (April–May) | Summer (June–August) | Dry Season (September–April) | Total Number of Observations | |||
|---|---|---|---|---|---|---|---|
| Period 1 | Period 2 | Period 1 | Period 2 | Period 1 | Period 2 | ||
| Fog | 183 | 138 | 287 | 146 | 754 | ||
| Clear-sky (cloud amount≤ 10%) | 255 | 178 | 433 | ||||
| Class | Miss | Total | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |||
| NFL (%) of LSF | 49.07 | 13.00 | 11.80 | 4.91 | 7.69 | 6.63 | 3.85 | 3.05 | 100 |
| NFL (%) of clear-sky | 0.23 | 4.38 | 2.08 | 0.46 | 1.39 | 9.01 | 1.62 | 80.83 | 100 |
| WF | 1.00 | 0.90 | 0.80 | 0.70 | 0.60 | 0.50 | 0.50 | 0.00 | |
| WF* | 1.00 | 0.84 | 0.91 | 0.95 | 0.91 | 0.56 | 0.81 | 0.06 | |
| Satellite-Derived Threshold | Period | LSF (LSF1) | ||||
|---|---|---|---|---|---|---|
| HSS | CSI | POD | PC | FAR | ||
| FY-2D minus COMS (ΔR0.67) 0.44 < ΔR0.67 < 0.995 | 2012–2013 | 0.673 (0.821) | 0.766 (0.846) | 0.802 (0.909) | 0.841 (0.911) | 0.055 (0.076) |
| 2014–2015 | 0.739 (0.814) | 0.801 (0.826) | 0.838 (0.887) | 0.872 (0.907) | 0.052 (0.077) | |
| 2012–2015 | 0.699 (0.819) | 0.780 (0.839) | 0.816 (0.901) | 0.853 (0.910) | 0.054 (0.076) | |
| COMS R0.67 0.185 < R0.67 < 0.529 | 2012–2013 | 0.581 (0.661) | 0.670 (0.684) | 0.677 (0.696) | 0.783 (0.828) | 0.016 (0.024) |
| 2014–2015 | 0.601 (0.701) | 0.690 (0.725) | 0.729(0.791) | 0.799 (0.851) | 0.072 (0.103) | |
| 2012–2015 | 0.588 (0.676) | 0.677 (0.700) | 0.696(0.732) | 0.789 (0.837) | 0.039 (0.057) | |
| COMS R0.67 (KMA) 0.25 < RKMA < 0.55 | 2012–2013 | 0.468 (0.494) | 0.555 (0.514) | 0.555 (0.514) | 0.712 (0.739) | 0.000 (0.000) |
| 2014–2015 | 0.525 (0.588) | 0.596 (0.594) | 0.602 (0.605) | 0.749 (0.794) | 0.017 (0.027) | |
| 2012–2015 | 0.489 (0.530) | 0.571 (0.544) | 0.573 (0.548) | 0.726 (0.761) | 0.007 (0.012) | |
| FY-2D minus COMS (ΔBTD3.7-11) 10.5K < ΔBTD3.7-11 < 34.0K | 2012–2013 | 0.574 (0.613) | 0.680 (0.656) | 0.706 (0.696) | 0.785 (0.804) | 0.051 (0.080) |
| 2014–2015 | 0.605 (0.679) | 0.709 (0.718) | 0.771 (0.819) | 0.805 (0.839) | 0.103 (0.147) | |
| 2012–2015 | 0.585 (0.638) | 0.691 (0.680) | 0.731 (0.742) | 0.793 (0.818) | 0.072 (0.109) | |
| COMS BTD3.7-11 4.5K < BTD3.7-11 <3 1.0K | 2012–2013 | 0.349 (0.201) | 0.480 (0.277) | 0.502 (0.297) | 0.647 (0.583) | 0.085 (0.200) |
| 2014–2015 | 0.399 (0.317) | 0.495 (0.356) | 0.514 (0.379) | 0.678 (0.659) | 0.070 (0.141) | |
| 2012–2015 | 0.369 (0.245) | 0.485 (0.306) | 0.507 (0.328) | 0.659 (0.613) | 0.080 (0.176) | |
| COMS BTD3.7-11 (KMA) 15K < BTDKMA < 50K | 2012–2013 | 0.106 (0.016) | 0.145 (0.017) | 0.145 (0.017) | 0.446 (0.472) | 0.000 (0.000) |
| 2014–2015 | 0.101 (0.006) | 0.136 (0.017) | 0.137 (0.017) | 0.465 (0.504) | 0.049 (0.400) | |
| 2012–2015 | 0.104 (0.012) | 0.142 (0.017) | 0. 142 (0.017) | 0.453 (0.485) | 0.018 (0.200) | |
| POD | PIest | FAR | |
|---|---|---|---|
| ΔR0.67 | **0.873 | 0.085 | |
| ΔBTD3.7-11 | 0.704 | 0.057 | |
| R0.67 | 0.715 | 0.043 | |
| DSM | 0.982 | 0.853 | 0.135 |
| DSM* | 0.947 | 0.871 | 0.146 |
| This Study | Yoo et al. [8] | |
|---|---|---|
| Theoretical basis | Dual satellite observations | Dual satellite observations |
| Season | Warm season (April to August) | Summer (June to August) |
| Variables used for LSF detection | ΔR0.67, ΔBTD3.7-11 and R0.67 | ΔR0.67 and suggests R0.67 |
| Detection method | Probability Index derived from three variables (ΔR0.67, ΔBTD3.7-11, and R0.67) | Threshold test of ΔR0.67 in the domain (ΔR0.67 vs R0.67) |
| LSF spatial distribution | Yes | No |
| Number of LSF probability classes | 7 | 2 or 3 |
| Variability in LSF detection accuracy in a month or season | Low | High |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.-H.; Yoo, J.-M.; Choi, Y.-S.; Wu, D.; Jeong, J.-H. Probability Index of Low Stratus and Fog at Dawn using Dual Geostationary Satellite Observations from COMS and FY-2D near the Korean Peninsula. Remote Sens. 2019, 11, 1283. https://doi.org/10.3390/rs11111283
Yang J-H, Yoo J-M, Choi Y-S, Wu D, Jeong J-H. Probability Index of Low Stratus and Fog at Dawn using Dual Geostationary Satellite Observations from COMS and FY-2D near the Korean Peninsula. Remote Sensing. 2019; 11(11):1283. https://doi.org/10.3390/rs11111283
Chicago/Turabian StyleYang, Jung-Hyun, Jung-Moon Yoo, Yong-Sang Choi, Dong Wu, and Jin-Hee Jeong. 2019. "Probability Index of Low Stratus and Fog at Dawn using Dual Geostationary Satellite Observations from COMS and FY-2D near the Korean Peninsula" Remote Sensing 11, no. 11: 1283. https://doi.org/10.3390/rs11111283
APA StyleYang, J.-H., Yoo, J.-M., Choi, Y.-S., Wu, D., & Jeong, J.-H. (2019). Probability Index of Low Stratus and Fog at Dawn using Dual Geostationary Satellite Observations from COMS and FY-2D near the Korean Peninsula. Remote Sensing, 11(11), 1283. https://doi.org/10.3390/rs11111283