Potential of Cost-Efficient Single Frequency GNSS Receivers for Water Vapor Monitoring

 , , ,
, , ,  and
and
Abstract
1. Introduction
2. Methodology
2.1. Water Vapor from GNSS Measurements
2.2. SEID Ionospheric Delay Modeling
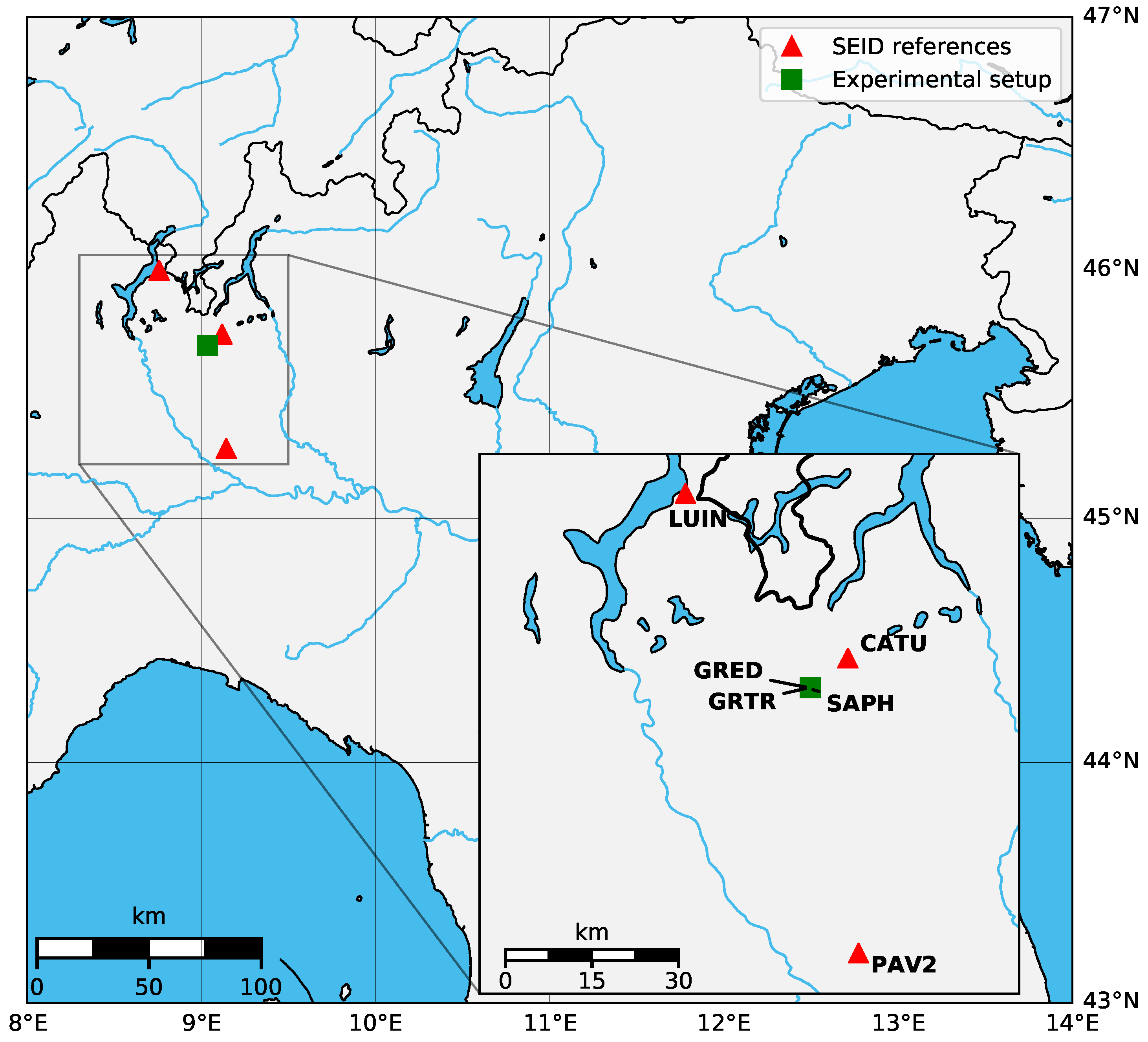
2.3. Experimental Setup and Data Processing
3. Results
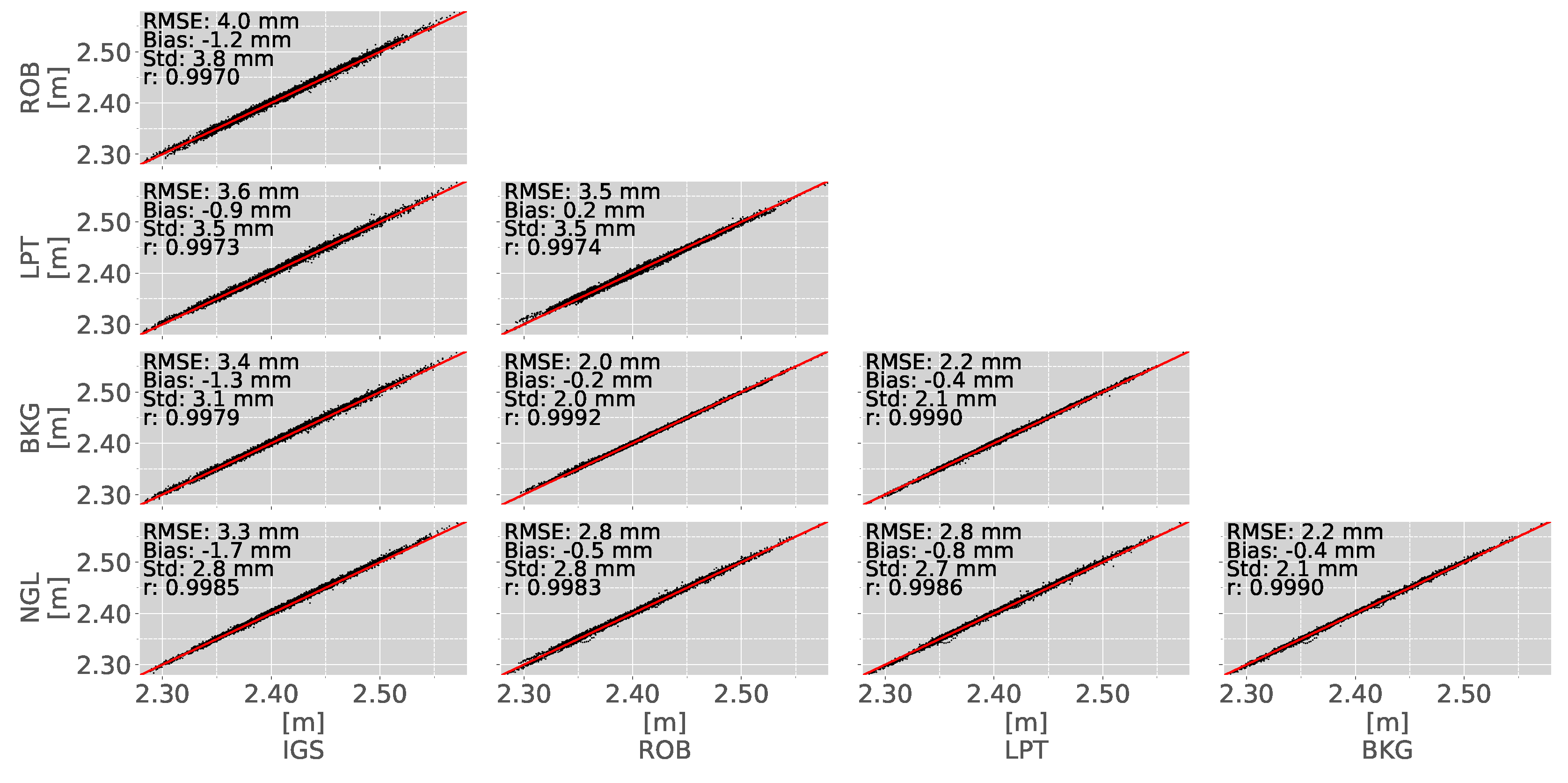
3.1. Inter-Comparison of Different ZTD Reference Datasets
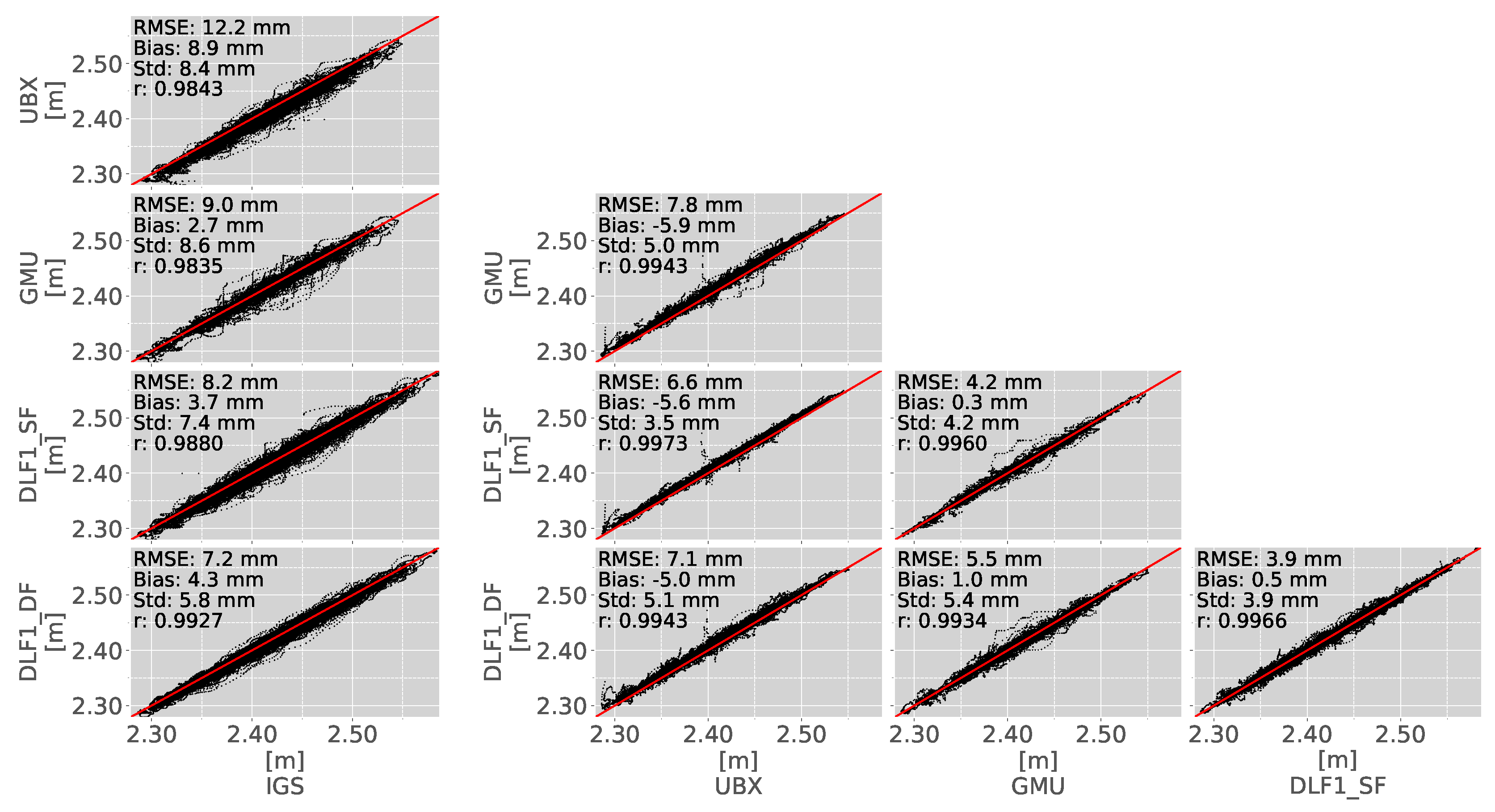
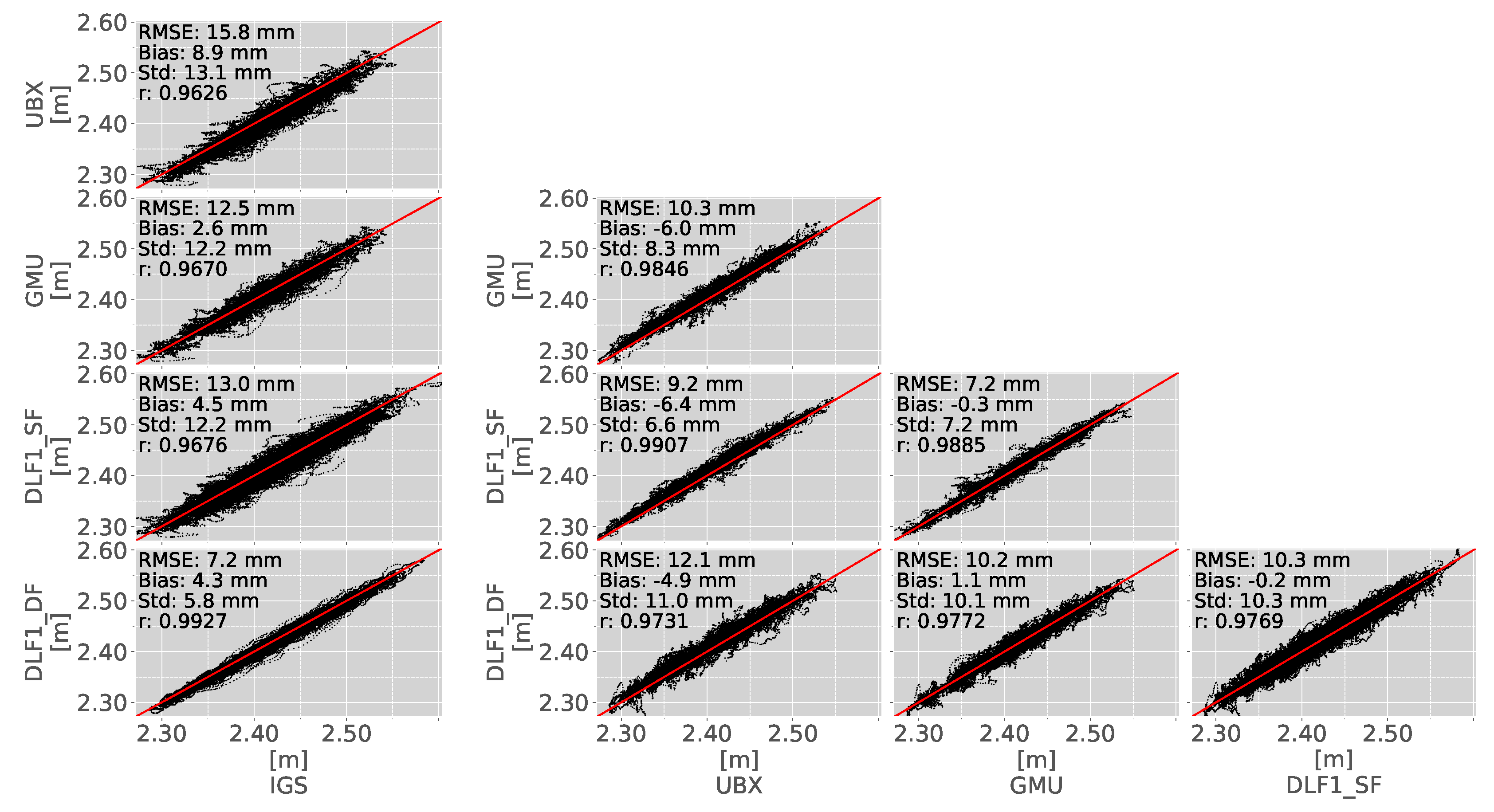
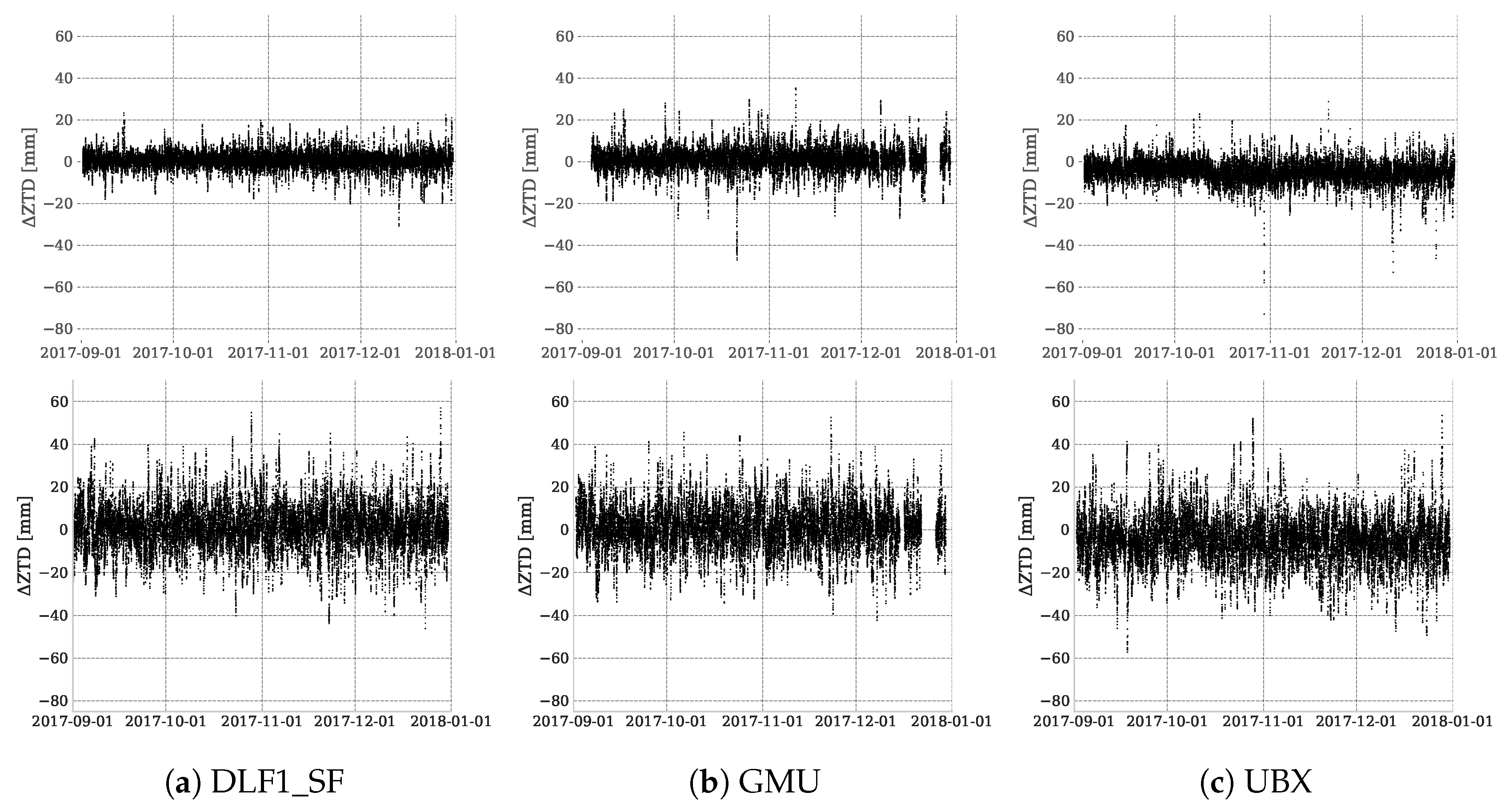
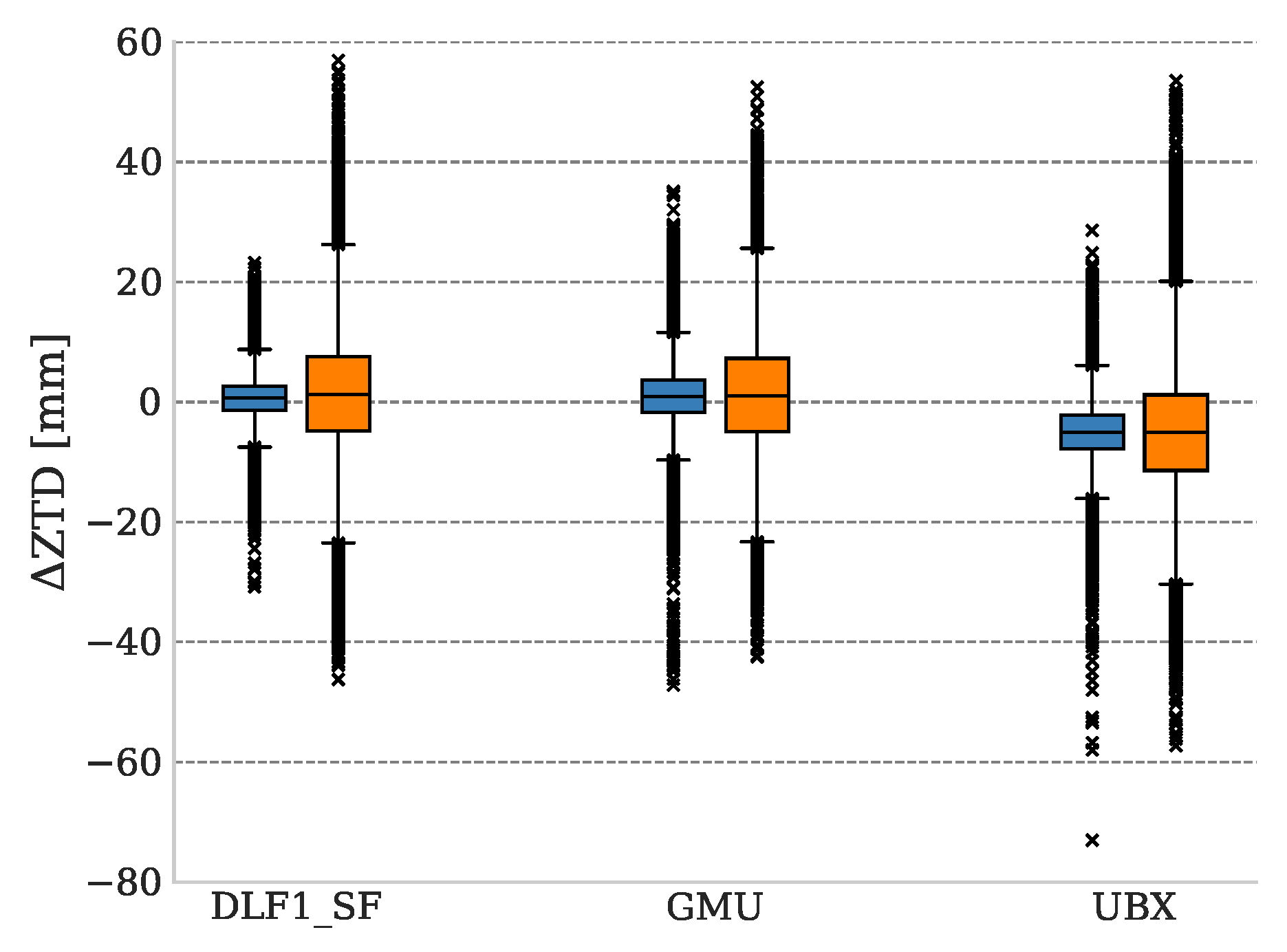
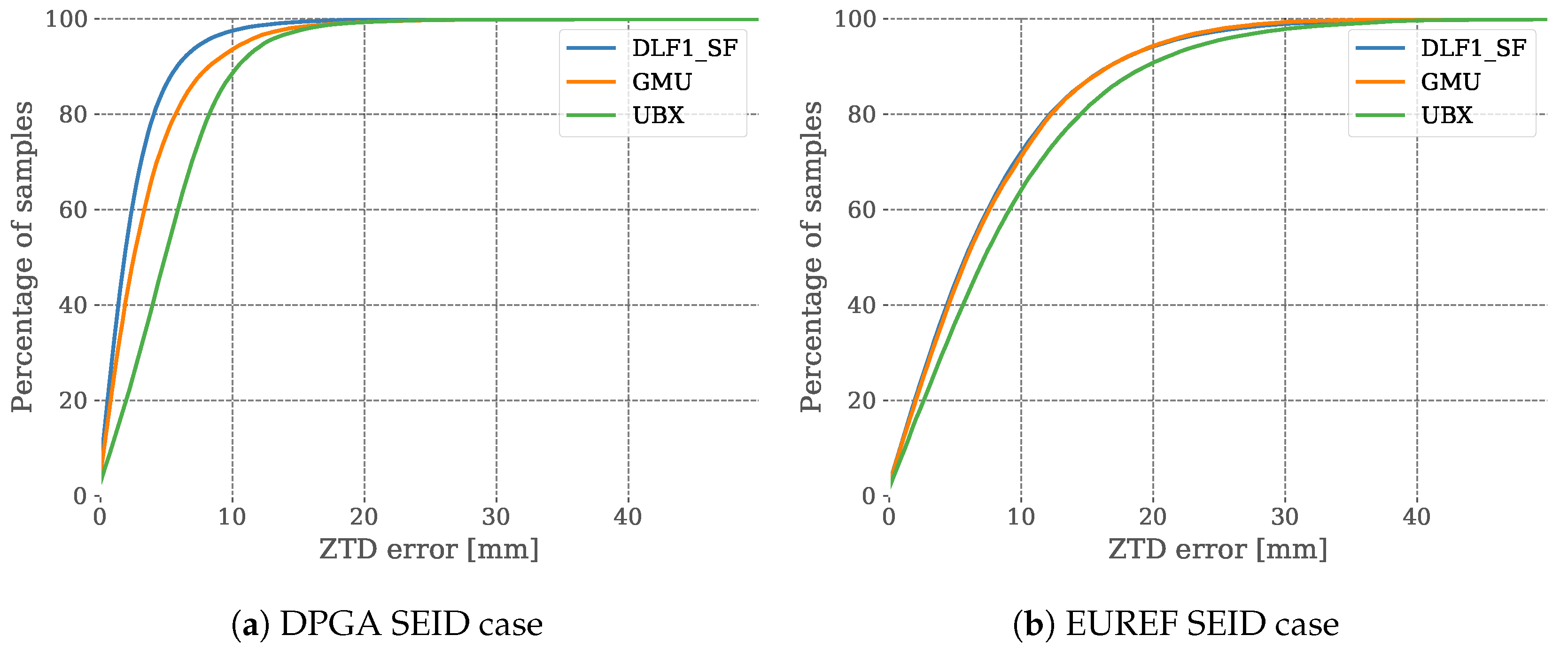
3.2. SEID-PPP-Processed ZTD Estimations
3.3. PWV Computation
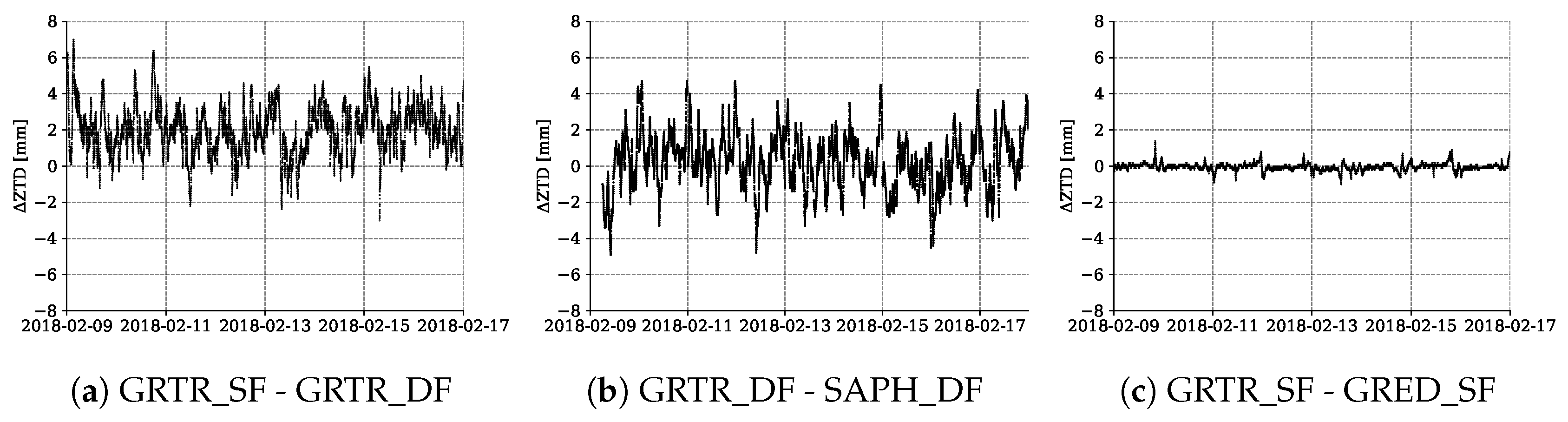
3.4. Splitting of A Geodetic Antenna to Different Receiver Types (Italy)
4. Discussion
4.1. Inter-Comparison of Reference Datasets and Analysis of the Software-Related Error
4.2. SEID DPGA Experiment and Antenna Impact
4.3. SEID EUREF Experiment
4.4. PWV Estimations
4.5. Antenna Splitting
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Analysis Center |
| AWS | Automatic Weather Station |
| BKG | Federal Agency for Cartography and Geodesy |
| CDDIS | Crustal Dynamics Data Information System |
| COCONet | Continuously Operating Carribbean GPS Observational Network |
| DLF1_DF | IGS station DLF1 (dual-frequency) |
| DLF1_SF | IGS station DLF1 (single-frequency) |
| DPGA | Dutch Permanent GNSS Array |
| EGM08 | Earth Gravity Model 2008 |
| E-GVAP | EUMETNET GNSS water vapor Programme |
| EPN | EUREF Permanent Network |
| GFZ | German Research Centre for Geosciences |
| GMF | Global Mapping Function |
| GMU | GeoGuard Monitoring Unit |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GPT | Global Pressure/Temperature |
| IGS | International GNSS Service |
| IP | Ingress Protection |
| IPP | Ionospheric Pierce Point |
| IWV | Integrated Water Vapor |
| KNMI | Royal Netherlands Meteorological Institute |
| LPT | Federal Office of Topography |
| NGL | Nevada Geodetic Laboratory |
| NRT | Near-Real Time |
| PPP | Precise Point Positioning |
| PWV | Precipitable Water Vapor |
| RF | Radio Frequency |
| RINEX | Receiver Independent Exchange Format |
| RMSE | Root Mean Square Error |
| ROB | Royal Observatory of Belgium |
| RTK | Real-Time Kinematic |
| SEID | Satellite-specific and Epoch-differenced Ionospheric Delay |
| STD | Slant Total Delay |
| teqc | translation, editing and quality check |
| UBX | u-blox NEO-M8T evaluation toolkit |
| ZHD | Zenith Hydrostatic Delay |
| ZTD | Zenith Tropospheric Delay |
| ZWD | Zenith Wet Delay |
References
- Kiehl, J.T.; Trenberth, K.E. Earth’s Annual Global Mean Energy Budget. Bull. Am. Meteorol. Soc. 1997, 78, 197–208. [Google Scholar] [CrossRef]
- Andrews, D. An Introduction to Atmospheric Physics; International Geophysics Series; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Seko, H.; Nakamura, H.; Shoji, Y.; Iwabuchi, T. The meso-y scale water vapor distribution associated with a thunderstorm calculated from a dense network of GPS receivers. JMSJ 2004, 82, 569–586. [Google Scholar] [CrossRef]
- Cess, R.D.; Potter, G.L.; Blanchet, J.P.; Boer, G.J.; Del Genio, A.D.; Déqué, M.; Dymnikov, V.; Galin, V.; Gates, W.L.; Ghan, S.J.; et al. Intercomparison and interpretation of climate feedback processes in 19 atmospheric general circulation models. J. Geophys. Res. Atmos. 1990, 95, 16601–16615. [Google Scholar] [CrossRef]
- Ning, T.; Wang, J.; Elgered, G.; Dick, G.; Wickert, J.; Bradke, M.; Sommer, M.; Querel, R.; Smale, D. The uncertainty of the atmospheric integrated water vapour estimated from GNSS observations. Atmos. Meas. Tech. 2016, 9, 79. [Google Scholar] [CrossRef]
- Kuo, Y.H.; Zou, X.; Guo, Y.R. Variational assimilation of precipitable water using a nonhydrostatic mesoscale adjoint model. Part I: Moisture retrieval and sensitivity experiments. Mon. Weather Rev. 1996, 124, 122–147. [Google Scholar] [CrossRef]
- Sato, K.; Realini, E.; Tsuda, T.; Oigawa, M.; Iwaki, Y.; Shoji, Y.; Seko, H. A high-resolution, precipitable water vapor monitoring system using a dense network of GNSS receivers. J. Dis. Res. 2013, 8, 37–47. [Google Scholar] [CrossRef]
- Realini, E.; Sato, K.; Tsuda, T.; Oigawa, M.; Iwaki, Y.; Shoji, Y.; Seko, H. Local-scale Precipitable Water Vapor Retrieval from High-Elevation Slant Tropospheric Delays Using A Dense Network of GNSS Receivers. In IAG 150 Years. International Association of Geodesy Symposia; Rizos, C., Willis, P., Eds.; Springer: Cham, Switzerland, 2015; Volume 143, pp. 485–490. [Google Scholar]
- GNSS Earth Observation Network System. Available online: http://datahouse1.gsi.go.jp/terras/terras_english.html (accessed on 12 September 2018).
- Oigawa, M.; Tsuda, T.; Seko, H.; Shoji, Y.; Realini, E. Data assimilation experiment of precipitable water vapor observed by a hyper-dense GNSS receiver network using a nested NHM-LETKF system. Earth Planets Space 2018, 70, 74. [Google Scholar] [CrossRef]
- Baldysz, Z.; Nykiel, G.; Figurski, M.; Araszkiewicz, A. Assessment of the Impact of GNSS Processing Strategies on the Long-Term Parameters of 20 Years IWV Time Series. Remote Sens. 2018, 10, 496. [Google Scholar] [CrossRef]
- Deng, Z.; Bender, M.; Dick, G.; Ge, M.; Wickert, J.; Ramatschi, M.; Zou, X. Retrieving tropospheric delays from GPS networks densified with single frequency receivers. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. B Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Deng, Z.; Bender, M.; Zus, F.; Ge, M.; Dick, G.; Ramatschi, M.; Wickert, J.; Lhnert, U.; Schön, S. Validation of tropospheric slant path delays derived from single and dual frequency GPS receivers. Radio Sci. 2011, 46, 1–11. [Google Scholar] [CrossRef]
- GeoGuard Earth Monitoring Services. Available online: http://www.geoguard.eu/ (accessed on 16 May 2018).
- Thayer, G. An improved equation for the radio refractive index of air. Radio Sci. 1974, 9, 803–807. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. Bull. Geod. 1972, 46, 279–298. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Baltink, H.K.; Van Der Marel, H.; van der Hoeven, A.G. Integrated atmospheric water vapor estimates from a regional GPS network. J. Geophys. Res. Atmos. 2002, 107. [Google Scholar] [CrossRef]
- Bevis, M. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. An earth gravitational model to degree 2160: EGM2008. EGU Gener. Assem. 2008, 10, 13–18. [Google Scholar]
- Berberan-Santos, M.N.; Bodunov, E.N.; Pogliani, L. On the barometric formula. Am. J. Phys. 1997, 65, 404–412. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and predicting the Earth’s ionosphere using the Global Positioning System. Geod. Geophys. Arb. Schweiz 1999, 59. [Google Scholar]
- Araujo-Pradere, E.; Fuller-Rowell, T.; Spencer, P.; Minter, C. Differential validation of the US-TEC model. Radio Sci. 2007, 42, RS3016. [Google Scholar] [CrossRef]
- Estey, L.H.; Meertens, C.M. TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Herrera, A.M.; Suhandri, H.F.; Realini, E.; Reguzzoni, M.; de Lacy, M.C. goGPS: Open-source MATLAB software. GPS Solut. 2016, 20, 595–603. [Google Scholar] [CrossRef]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean. Dynam. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Dow, J.; Neilan, R.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Noll, C.E. The Crustal Dynamics Data Information System: A resource to support scientific analysis using space geodesy. Adv. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Blewitt, G. FTP Archive of NGL Troposphere Delay Products. Available online: ftp://gneiss.nbmg.unr.edu/trop (accessed on 16 May 2018).
- EUREF Permanent GNSS Network. Available online: http://epncb.eu/_productsservices/troposphere/ (accessed on 16 May 2018).
- de Haan, S. National/Regional Operational Procedures of GPS Water Vapour Networks and Agreed International Procedures; Rep WMO/TD-No. 1340; World Meteorological Organization: Geneva, Switzerland, 2006. [Google Scholar]
- Topcon Positioning Italy. Available online: http://www.netgeo.it/ (accessed on 28 May 2018).
- Pesyna, K.M.J.; Robert, W.H.J.; Humphreys, T.E. Centimeter positioning with a smartphone-quality GNSS antenna. In Proceedings of the ION GNSS+ Meeting, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Jiang, P.; Ye, S.; Chen, D.; Liu, Y.; Xia, P. Retrieving precipitable water vapor data using GPS zenith delays and global reanalysis data in China. Remote Sens. 2016, 8, 389. [Google Scholar] [CrossRef]
- Adams, D.K.; Fernandes, R.M.; Kursinski, E.R.; Maia, J.M.; Sapucci, L.F.; Machado, L.A.; Vitorello, I.; Monico, J.F.G.; Holub, K.L.; Gutman, S.I.; et al. A dense GNSS meteorological network for observing deep convection in the Amazon. Atmos. Sci. Lett. 2011, 12, 207–212. [Google Scholar] [CrossRef]
- Barindelli, S.; Realini, E.; Venuti, G.; Fermi, A.; Gatti, A. Detection of water vapor time variations associated with heavy rain in northern Italy by geodetic and low-cost GNSS receivers. Earth Planets Space 2018, 70, 28. [Google Scholar] [CrossRef]
- Transforming Weather Water Data into Value-Added Information services for Sustainable Growth in Africa. Available online: http://twiga-h2020.eu/ (accessed on 12 September 2018).
- Dong, Z.; Jin, S. 3-D Water Vapor Tomography in Wuhan from GPS, BDS and GLONASS Observations. Remote Sens. 2018, 10, 62. [Google Scholar] [CrossRef]
- Lu, C.; Chen, X.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.; Zheng, K.; Schuh, H. Real-Time Tropospheric Delays Retrieved from Multi-GNSS Observations and IGS Real-Time Product Streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Processing Strategies |
|---|---|
| Software | goGPS v. 0.4.3 |
| Observations | GPS-only |
| Sampling interval | 30-second |
| Processing mode | SEID-PPP |
| Antenna calibration | IGS (if available) |
| Troposphere modeling | Saastamoinen (with GPT model) |
| Troposphere mapping function | GMF |
| Elevation cutoff | 10 |
| Ocean loading | FES2004 |
| Observation weighting | same weight for all observations |
| Clock & orbits | IGS Final |
| Kalman filter reset | no (seamless) |
| Code observation error threshold | 30 m |
| Phase observation error threshold | 0.05 m |
| Code least-squares estimation error st. dev. threshold | 40 m |
| AC | Processing Engine | Processing Method | Cutoff () | Resolution | Missing Days |
|---|---|---|---|---|---|
| IGS | Bernese 5.0 & 5.2 | PPP | 7 | 5 min | 10 |
| NGL | GIPSY/OASIS II | PPP | 7 | 5 min | 10 |
| BKG | Bernese 5.2 | Double-Differences | 3 | 60 min | 1 |
| LPT | Bernese 5.3 | Double-Differences | 3 | 60 min | 4 |
| ROB | Bernese 5.2 | Double-Differences | 3 | 60 min | 4 |
| Case | Site | RMSE [mm] | Bias [mm] | [mm] | Corr | %≥3 | %≥10 mm | %Missing |
|---|---|---|---|---|---|---|---|---|
| DPGA | DLF1_SF | 3.93 | 0.52 | 3.90 | 0.9967 | 1.64 | 2.61 | 0.46 |
| GMU | 5.55 | 0.99 | 5.46 | 0.9938 | 1.44 | 6.77 | 7.10 | |
| UBX | 7.10 | −4.96 | 5.08 | 0.9945 | 2.63 | 12.68 | 0.87 | |
| EUREF | DLF1_SF | 10.32 | −0.20 | 10.32 | 0.9769 | 0.92 | 29.04 | 0.28 |
| GMU | 10.20 | 1.11 | 10.14 | 0.9772 | 0.62 | 29.87 | 6.89 | |
| UBX | 12.09 | −4.93 | 11.04 | 0.9731 | 1.38 | 37.12 | 0.86 |
| Case | Site | RMSE [mm] | Bias [mm] | [mm] |
|---|---|---|---|---|
| SEID (DPGA) | DLF1_SF | 0.60 | 0.08 | 0.59 |
| GMU | 0.85 | 0.17 | 0.84 | |
| UBX | 1.05 | -0.72 | 0.77 | |
| SEID (EUREF) | DLF1_SF | 1.61 | -0.03 | 1.61 |
| GMU | 1.60 | 0.20 | 1.59 | |
| UBX | 1.86 | -0.70 | 1.72 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krietemeyer, A.; Ten Veldhuis, M.-c.; Van der Marel, H.; Realini, E.; Van de Giesen, N. Potential of Cost-Efficient Single Frequency GNSS Receivers for Water Vapor Monitoring. Remote Sens. 2018, 10, 1493. https://doi.org/10.3390/rs10091493
Krietemeyer A, Ten Veldhuis M-c, Van der Marel H, Realini E, Van de Giesen N. Potential of Cost-Efficient Single Frequency GNSS Receivers for Water Vapor Monitoring. Remote Sensing. 2018; 10(9):1493. https://doi.org/10.3390/rs10091493
Chicago/Turabian StyleKrietemeyer, Andreas, Marie-claire Ten Veldhuis, Hans Van der Marel, Eugenio Realini, and Nick Van de Giesen. 2018. "Potential of Cost-Efficient Single Frequency GNSS Receivers for Water Vapor Monitoring" Remote Sensing 10, no. 9: 1493. https://doi.org/10.3390/rs10091493
APA StyleKrietemeyer, A., Ten Veldhuis, M.-c., Van der Marel, H., Realini, E., & Van de Giesen, N. (2018). Potential of Cost-Efficient Single Frequency GNSS Receivers for Water Vapor Monitoring. Remote Sensing, 10(9), 1493. https://doi.org/10.3390/rs10091493