Forest Variable Estimation Using a High Altitude Single Photon Lidar System



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Sample Plots
2.2. ALS Data
2.3. Outlier Removal
2.4. Modeling
2.5. Accuracy Assessment
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ALS | airborne laser scanning |
| DEM | digital elevation models |
| SPL | single counting photon lidar |
References
- Nilsson, M. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Næsset, E. Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1997, 52, 49–56. [Google Scholar] [CrossRef]
- Hyyppä, J. Detecting and estimating attributes for single trees using laser scanner. Photogramm. J. Finl. 1999, 16, 27–42. [Google Scholar]
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, N.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A nationwide forest attribute map of Sweden predicted using airborne laser scanning data and field data from the National Forest Inventory. Remote Sens. Environ. 2017, 194, 447–454. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, A.; Söderman, U. Laser scanning of forest resources: The nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Harding, D. Pulsed laser altimeter ranging techniques and implications for terrain mapping. In Topographic Laser Ranging and Scanning; CRC Press: Boca Raton, FL, USA, 2018; pp. 201–220. [Google Scholar]
- Jutzi, B. Less Photons for More LiDAR? A Review from Multi-Photon Detection to Single Photon Detection. In Proceedings of the 56th Photogrammetric Week (PhoWo), University of Stuttgart, Stuttgart, Germany, 11–15 September 2017. [Google Scholar]
- Degnan, J.J. Photon-counting multikilohertz microlaser altimeters for airborne and spaceborne topographic measurements. J. Geodyn. 2002, 34, 503–549. [Google Scholar] [CrossRef]
- Stoker, J.; Abdullah, Q.; Nayegandhi, A.; Winehouse, J. Evaluation of Single Photon and Geiger Mode Lidar for the 3D Elevation Program. Remote Sens. 2016, 8, 767. [Google Scholar] [CrossRef]
- Degnan, J.; McGarry, J.; Zagwodzki, T.; Dabney, P.; Geiger, J.; Chabot, R.; Steggerda, C.; Marzouk, J.; Chu, A. Design and performance of an airborne multikilohertz photon-counting microlaser altimeter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 9–16. [Google Scholar]
- Degnan, J. Scanning, Multibeam, Single Photon Lidars for Rapid, Large Scale, High Resolution, Topographic and Bathymetric Mapping. Remote Sens. 2016, 8, 958. [Google Scholar] [CrossRef]
- Tang, H.; Swatantran, A.; Barrett, T.; DeCola, P.; Dubayah, R. Voxel-Based Spatial Filtering Method for Canopy Height Retrieval from Airborne Single-Photon Lidar. Remote Sens. 2016, 8, 771. [Google Scholar] [CrossRef]
- Wang, X.; Glennie, C.; Pan, Z. An Adaptive Ellipsoid Searching Filter for Airborne Single-Photon Lidar. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1258–1262. [Google Scholar] [CrossRef]
- Yang, Y.; Marshak, A.; Palm, S.P.; Várnai, T.; Wiscombe, W.J. Cloud impact on surface altimetry from a spaceborne 532-nm micropulse photon-counting lidar: System modeling for cloudy and clear atmospheres. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4910–4919. [Google Scholar] [CrossRef]
- Harding, D.J.; Dabney, P.W.; Valett, S. Polarimetric, two-color, photon-counting laser altimeter measurements of forest canopy structure. In Proceedings of the SPIE 8286, International Symposium on Lidar and Radar Mapping 2011: Technologies and Applications, Nanjing, China, 24 October 2011. [Google Scholar]
- Swatantran, A.; Tang, H.; Barrett, T.; DeCola, P.; Dubayah, R. Rapid, High-Resolution Forest Structure and Terrain Mapping over Large Areas using Single Photon Lidar. Sci. Rep. 2016, 6, 28277. [Google Scholar] [CrossRef] [PubMed]
- Gwenzi, D.; Lefsky, M.A. Prospects of photon counting lidar for savanna ecosystem structural studies. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-1, 141–147. [Google Scholar] [CrossRef]
- Turner, M.D.; Kamerman, G.W.; Wasiczko Thomas, L.M.; Spillar, E.J.; Kim, A.M.; Runyon, S.C.; Olsen, R.C. Comparison of full-waveform, single-photon sensitive, and discrete analog LIDAR data. In Proceedings of the SPIE 9465, Laser Radar Technology and Applications XX, and Atmospheric Propagation XII, 946501, Baltimore, MD, USA, 20–24 April 2015. [Google Scholar]
- Li, Q.; Degnan, J.; Barrett, T.; Shan, J. First evaluation on single photon-sensitive lidar data. Photogramm. Eng. Remote Sens. 2016, 82, 455–463. [Google Scholar] [CrossRef]
- Rosette, J.; Field, C.; Nelson, R.; DeCola, P.; Cook, B. A new photon-counting lidar system for vegetation analysis. In Proceedings of the 11th International Conference on LiDAR Applications for Assessing Forest Ecosystems (SilviLaser 2011), Hobart, Australia, 16–20 October 2011. [Google Scholar]
- Wikström, P.; Edenius, L.; Elfving, B.; Eriksson, L.O.; Lämås, T.; Sonesson, J.; Öhman, K.; Wallerman, J.; Waller, C.; Klintebäck, F. The Heureka forestry decision support system: An overview. Math. Comput. For. Nat. Resour. Sci. 2011, 3, 87–94. [Google Scholar]
- Wallerman, J.; Nyström, K.; Andersson, T.; Holmgren, J.; Lindgren, N.; Fransson, J. Surveys at Remningstorp in Years 2003–2014 (Department Report); Technical Report; SLU, Department of Forest Resource Management: Umeå, Sweden, 2017; in preparation. [Google Scholar]
- Isenburg, M. LAStools–Efficient Tools for LiDAR Processing. Available online: https://rapidlasso.com/lastools/ (accessed on 10 December 2017).
- McGaughey, R.J. FUSION/LDV: Software for LIDAR Data Analysis and Visualization. Available online: http://forsys.cfr.washington.edu/FUSION/fusionlatest.html (accessed on 5 January 2018).
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Smith, R.J. Logarithmic transformation bias in allometry. Am. J. Phys. Anthropol. 1993, 90, 215–228. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metadata | SPL100 | Optech Titan |
|---|---|---|
| Flight altitude (m) | 3800 | 400 |
| Average point density in sample plots (point/m) | 25.4 (SD 23) | 38.8 (SD 15) |
| Field of view (degree) | 30 | 30 |
| Wavelength (nm) | 532 | 1064 |
| Pulse repetition frequency (MHz) | 6.0 | 0.3 (per channel) |
| Date of acquisition | 31 October 2017 | 21 July 2016 |
| Leica SPL100 | Optech Titan |
|---|---|
| H = P95 | H = P90 |
| VOL = P95 + h95veg + e.c.m.c | VOL = P90 + h90veg + e.c.m.c |
| BIO = P95 + PFRA1.5 + e.c.m.c | BIO = P90 + PFRA1.5 |
| BA = P95 + PFRA1.5 + e.c.m.c | BA = P90 + PFRA1.5 |
| D = P95 + PFRA1.5 | D = P90 + PFRA1.5 |
| Abbrevention | Definition | FUSION Metric |
|---|---|---|
| P95 | The height of the point were 95 percent of the points are lower. | Elev.P95 |
| P90 | The height of the point were 90 percent of the points are lower. | Elev.P90 |
| e.c.m.c | The qubic root of the mean qubic elevation. | Elev.CURT.mean.CUBE |
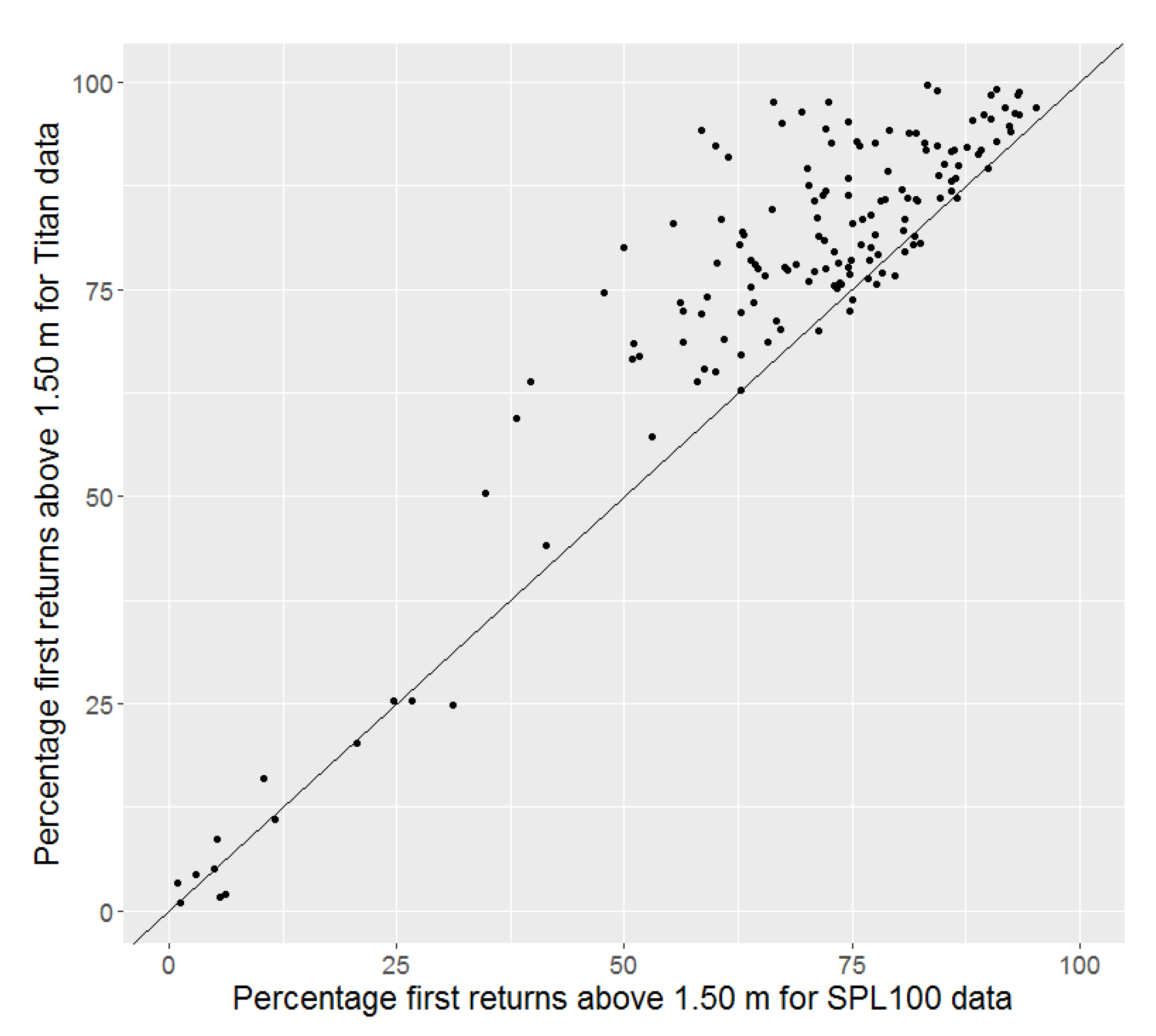
| PFRA1.5 | The percentage of first returned reflections 1.5 m above estimated ground. | Percentage.first.returns.above.1.50 |
| h95veg | P95 · PFRA1.5 | |
| h90veg | P95 · PFRA1.5 |
| Sensor | Variable | Adj.R | RMSE | Relative RMSE (%) |
|---|---|---|---|---|
| Lorey’s mean height (m) | 0.96 | 1.14 | 6.11 | |
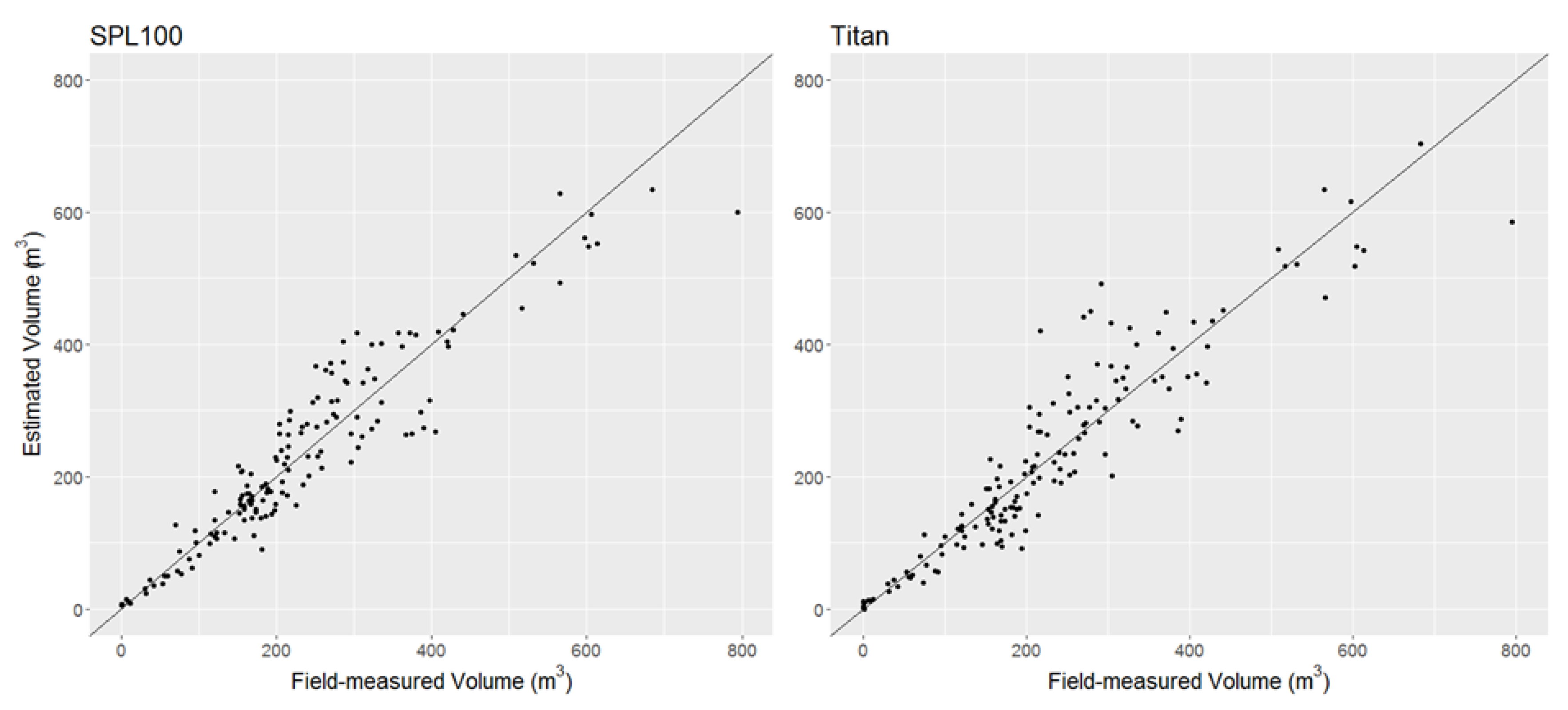
| Stem volume (m/ha) | 0.93 | 48.84 | 21.23 | |
| Leica SPL100 | Above ground biomass (ton/ha) | 0.93 | 26.90 | 21.27 |
| Basal area (m/ha) | 0.90 | 5.30 | 21.98 | |
| Basal area weighted diameter (cm) | 0.86 | 3.38 | 13.77 | |
| Lorey’s mean height (m) | 0.96 | 1.16 | 6.24 | |
| Stem volume (m/ha) | 0.91 | 55.95 | 24.31 | |
| Optech Titan | Above ground biomass (ton/ha) | 0.94 | 29.02 | 22.94 |
| Basal area (m/ha) | 0.93 | 4.80 | 19.90 | |
| Basal area weighted diameter (cm) | 0.85 | 3.46 | 14.10 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wästlund, A.; Holmgren, J.; Lindberg, E.; Olsson, H. Forest Variable Estimation Using a High Altitude Single Photon Lidar System. Remote Sens. 2018, 10, 1422. https://doi.org/10.3390/rs10091422
Wästlund A, Holmgren J, Lindberg E, Olsson H. Forest Variable Estimation Using a High Altitude Single Photon Lidar System. Remote Sensing. 2018; 10(9):1422. https://doi.org/10.3390/rs10091422
Chicago/Turabian StyleWästlund, André, Johan Holmgren, Eva Lindberg, and Håkan Olsson. 2018. "Forest Variable Estimation Using a High Altitude Single Photon Lidar System" Remote Sensing 10, no. 9: 1422. https://doi.org/10.3390/rs10091422
APA StyleWästlund, A., Holmgren, J., Lindberg, E., & Olsson, H. (2018). Forest Variable Estimation Using a High Altitude Single Photon Lidar System. Remote Sensing, 10(9), 1422. https://doi.org/10.3390/rs10091422