Evaluation of PROBA-V Collection 1: Refined Radiometry, Geometry, and Cloud Screening



Abstract

1. Introduction
2. Description of PROBA-V C1 Modifications
2.1. Radiometric Calibration
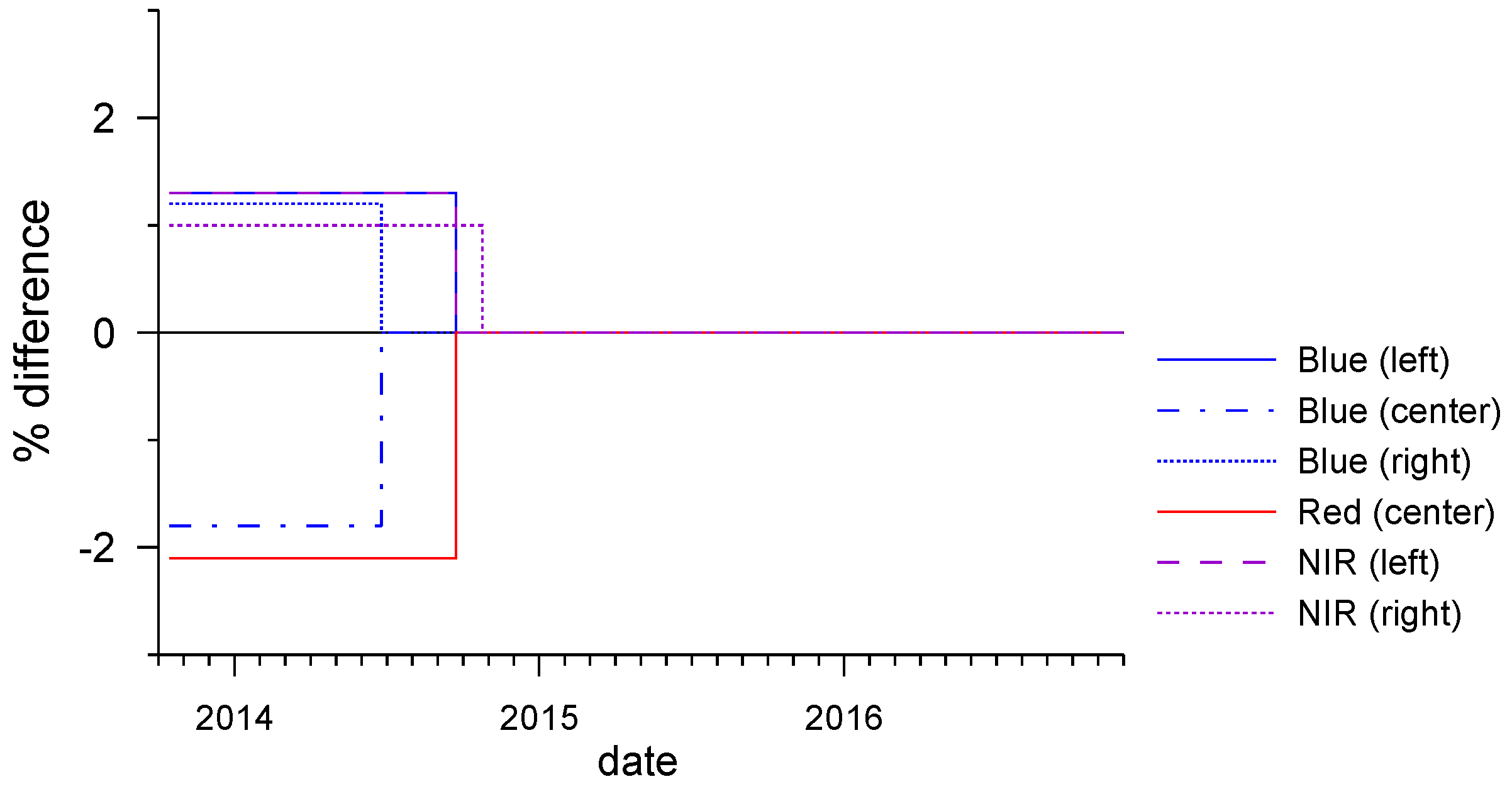
2.1.1. Inter-Camera Adjustments of VNIR Absolute Calibration Coefficients
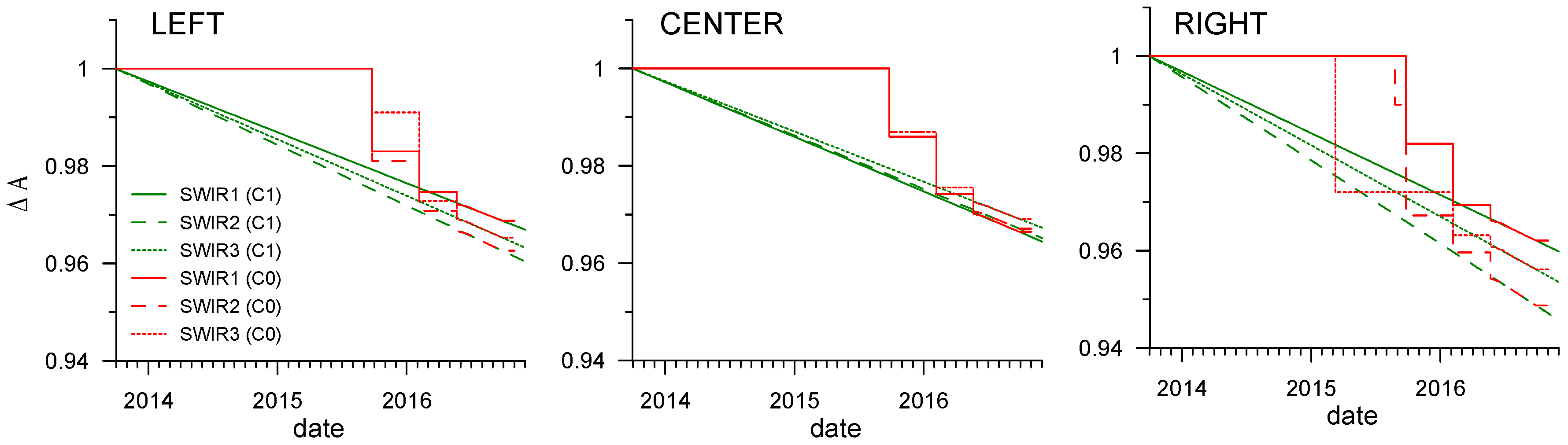
2.1.2. Degradation Model for SWIR Absolute Calibration Coefficients
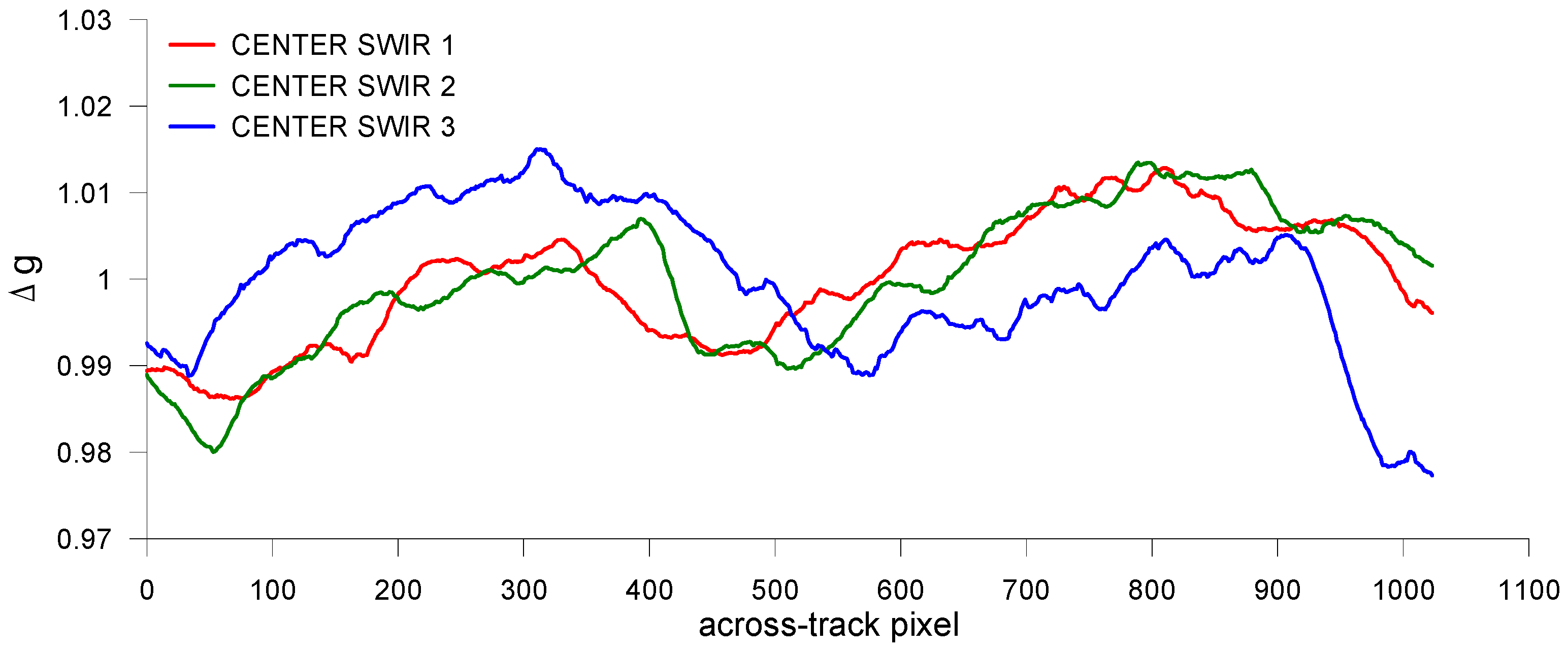
2.1.3. Improvement of Multi-Angular Calibration of the Center Camera SWIR Strips
2.1.4. Dark Current and Bad Pixels
2.2. Geometric Calibration
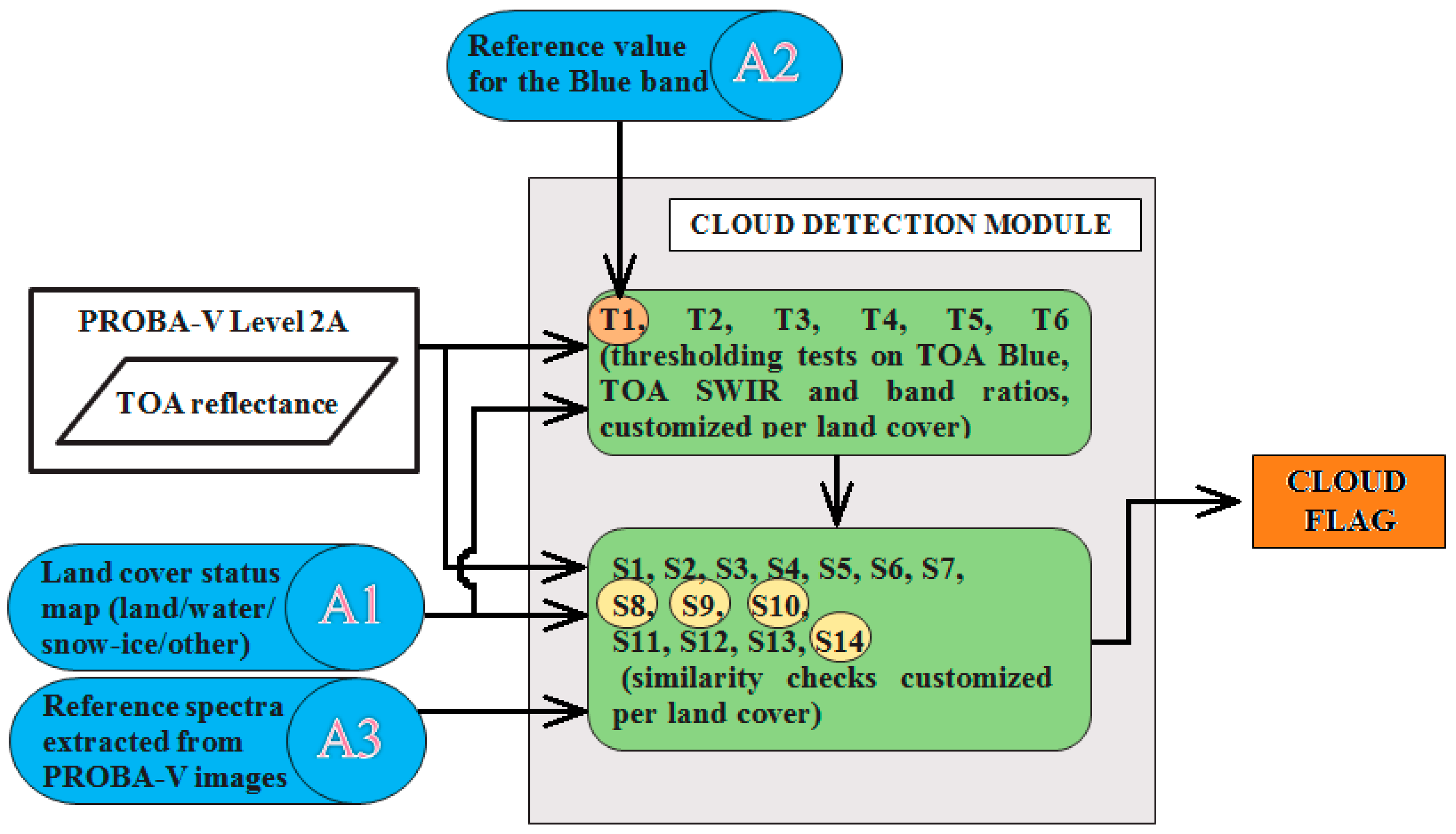
2.3. Cloud Detection
2.4. Other Differences between C0 and C1 and Issues Solved
3. Materials and Methods
3.1. Data Used
3.1.1. PROBA-V Collection 1 Level 2A
3.1.2. PROBA-V Collection 0 and Collection 1 Level 3 S10-TOC
3.1.3. SPOT/VGT Collection 2 and Collection 3 Level 3 S10-TOC
3.1.4. METOP/AVHRR
3.2. Sampling
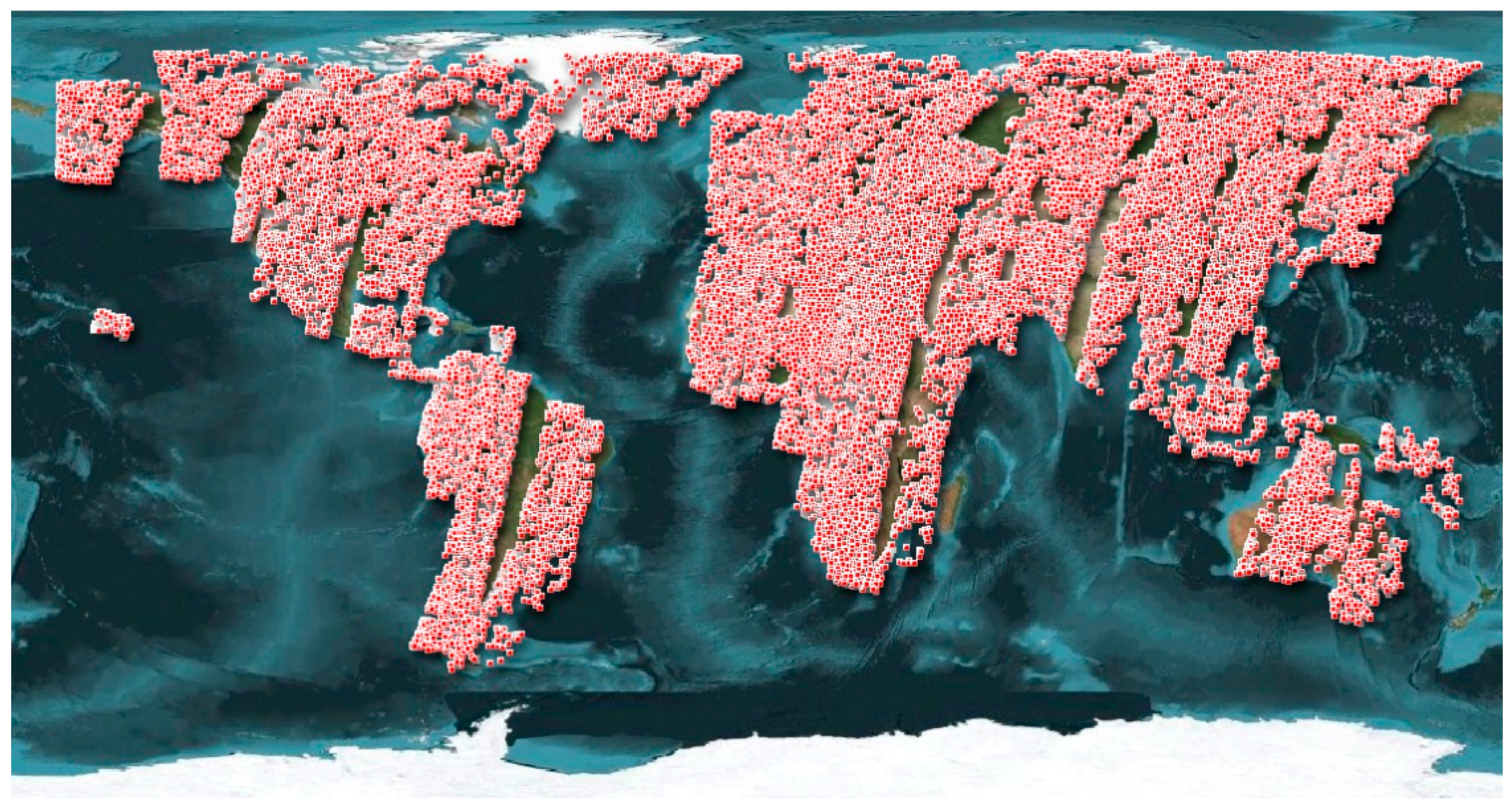
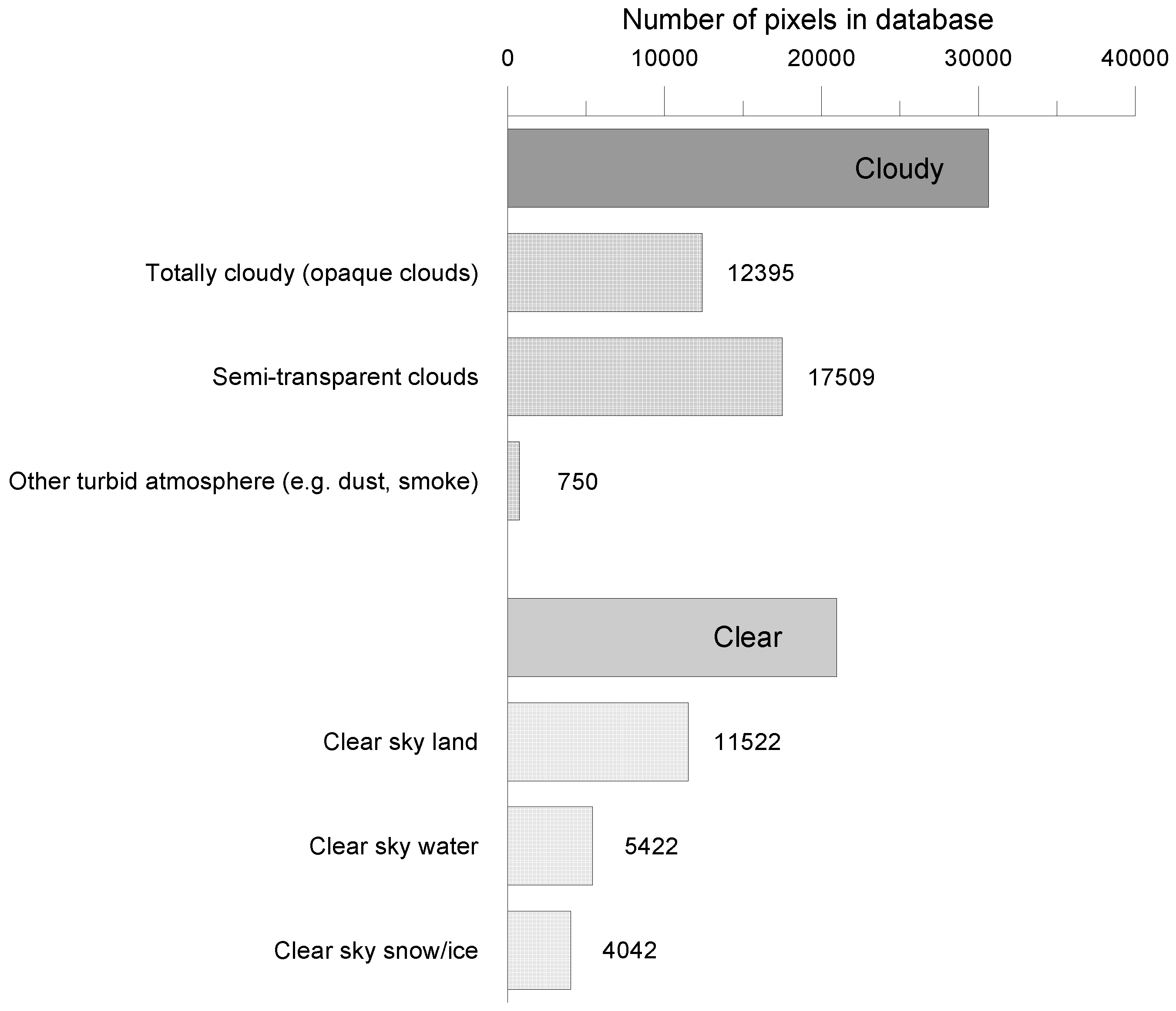
3.2.1. Validation Database for Cloud Detection
3.2.2. Global Subsample
3.3. Methods
3.3.1. Validation of the Cloud Detection Algorithm
3.3.2. Spatio-Temporal Variation of Validation Metrics
4. Results and Discussion
4.1. Cloud Detection
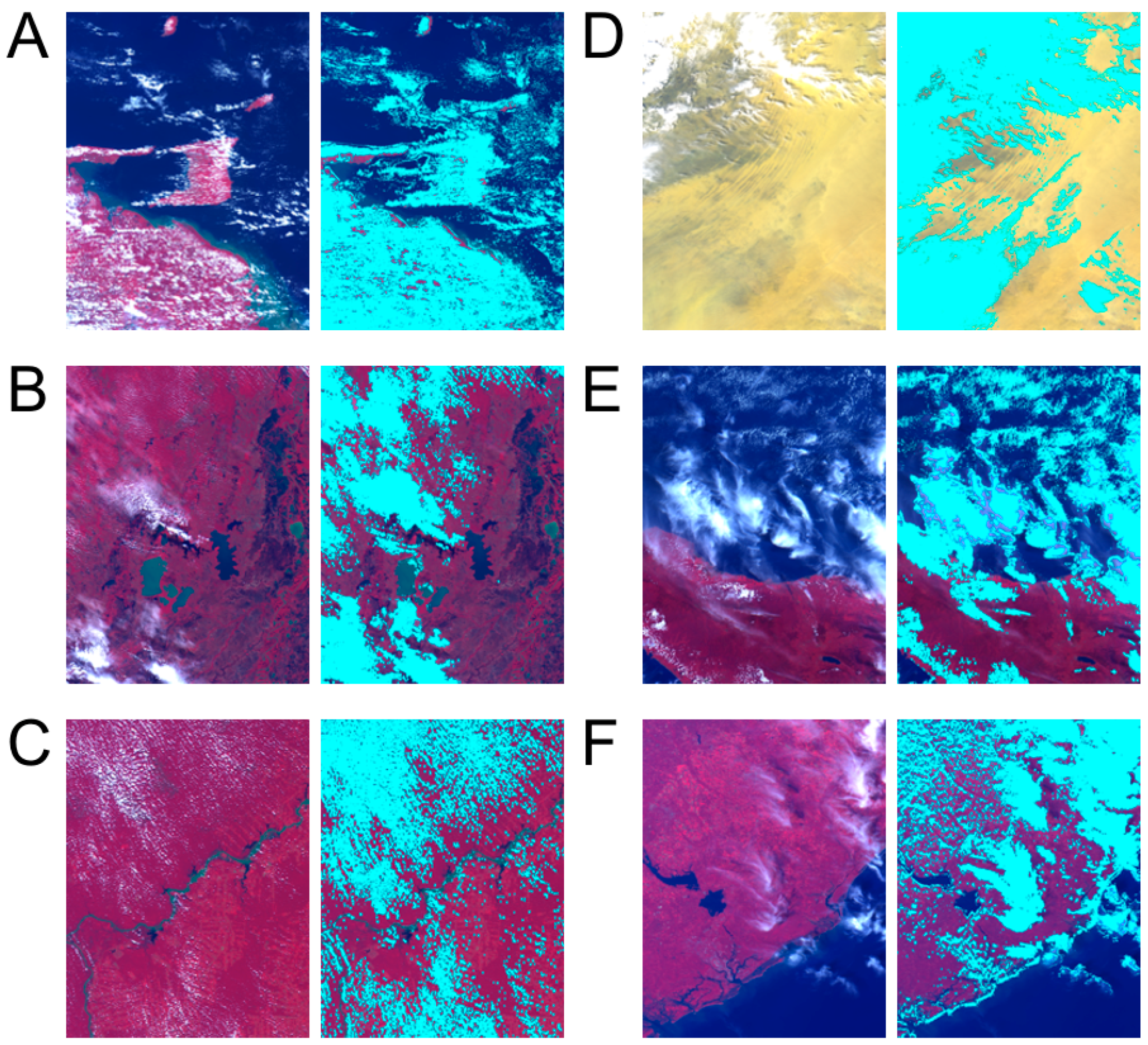
4.1.1. Qualitative Evaluation
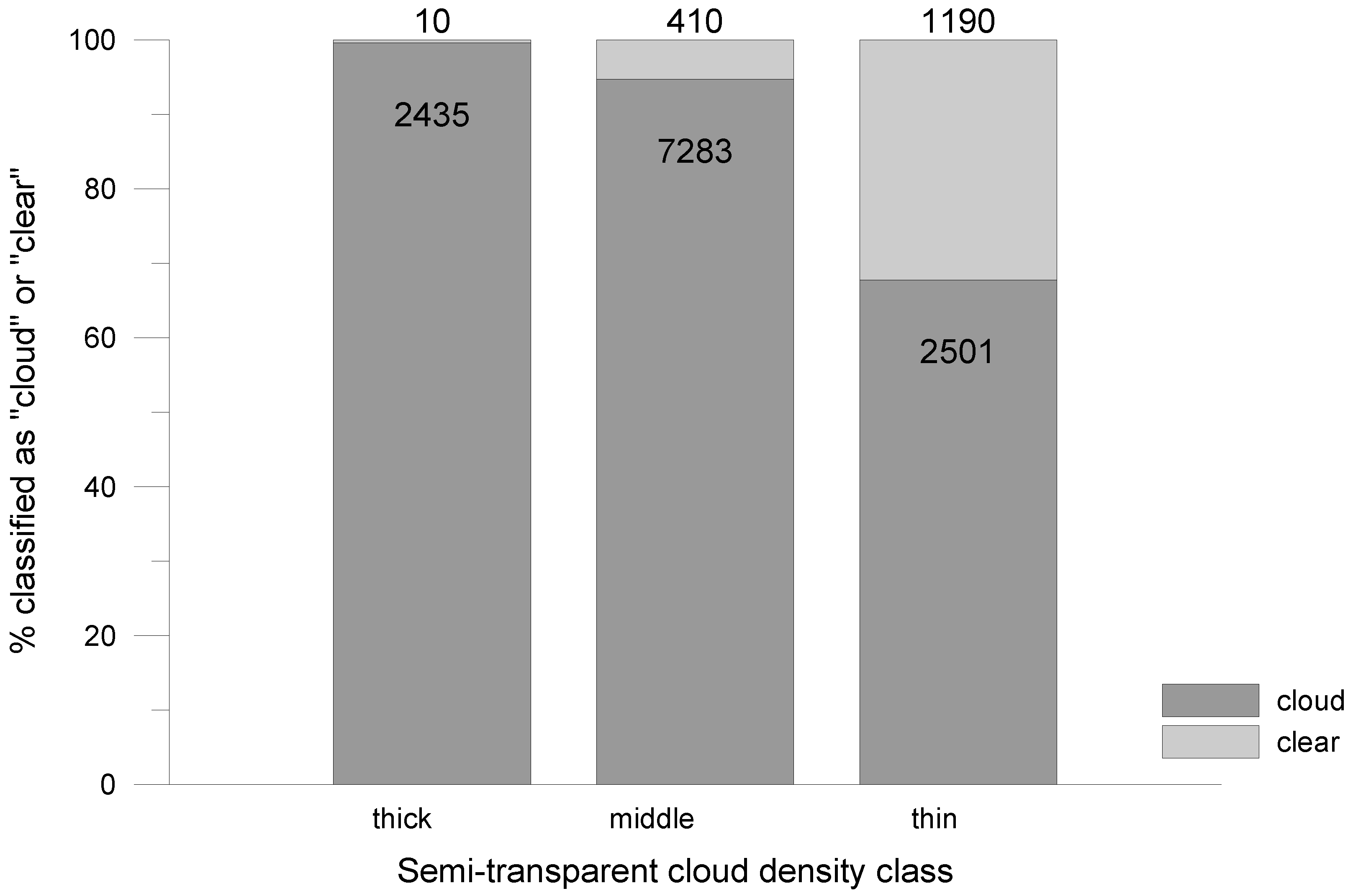
4.1.2. Quantitative Evaluation
4.1.3. Effect on S10 Product Completeness
4.2. Comparison between PROBA-V C0 and C1
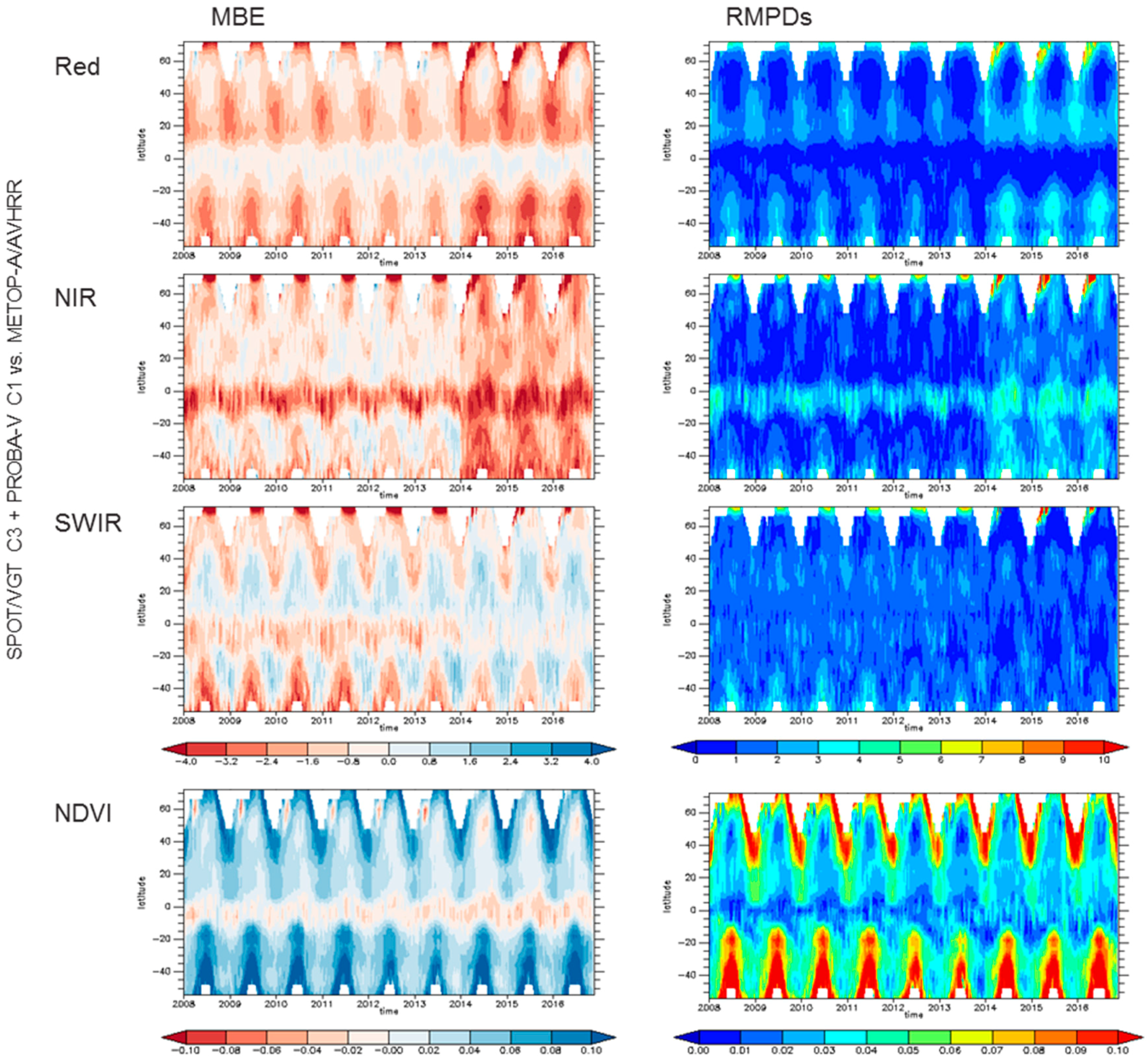
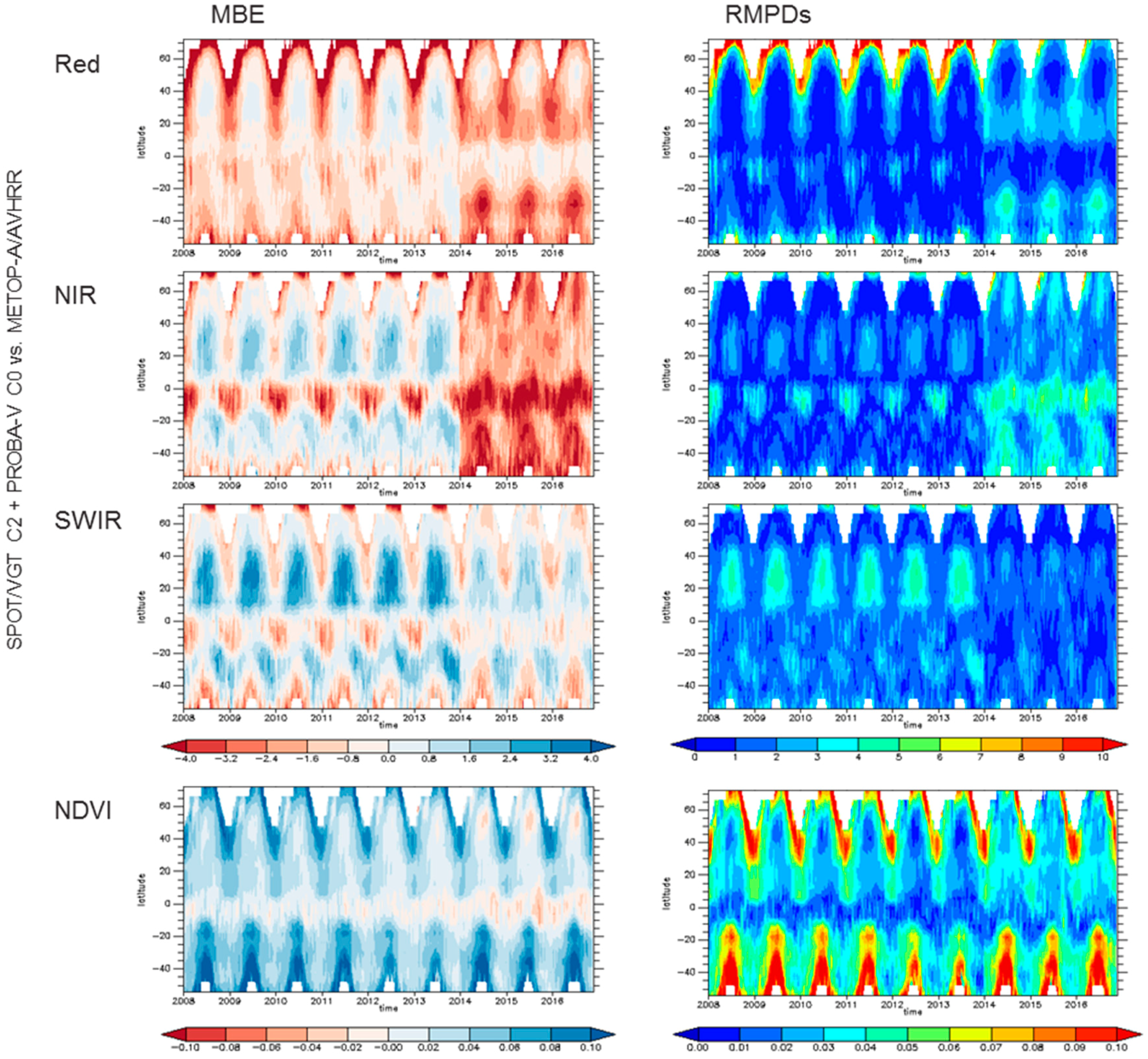
4.3. Comparison to METOP/AVHRR
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AVHRR | Advanced very high resolution radiometer |
| BRDF | Bidirectional reflectance distribution function |
| C0 | Collection 0 |
| C1 | Collection 1 |
| C2 | Collection 2 |
| C3 | Collection 3 |
| CCI | Climate Change Initiative |
| CE | Commission error |
| DCC | Deep convective clouds |
| EPS | EUMETSAT Polar System |
| EUMETSAT | European Organisation for the Exploitation of Meteorological Satellites |
| GCP | Ground Control Point |
| GLS | Global Land Survey |
| GMR slope | Geometric Mean Regression slope |
| GMR intercept | Geometric Mean Regression intercept |
| ICP | Instrument calibration parameters |
| IQC | Image Quality Center |
| MEP | Mission Exploitation Platform |
| MSD | Mean squared difference |
| NIR | Near infrared |
| NRT | Near-real time |
| OA | Overall accuracy |
| OD | Observation day |
| OE | Omission error |
| OSCAR | Optical Sensor CAlibration with simulated Radiance |
| PA | Producer’s accuracy |
| PROBA-V | PRoject for On-Board Autonomy–Vegetation |
| R2 | Coefficient of determination |
| SAD | Spectral angle distance |
| RMSD | Root-mean-squared difference |
| S | Similarity check |
| S1-TOA | Top-of-atmosphere daily synthesis product |
| S1-TOC | Daily top-of-canopy synthesis product |
| S10-TOC | 10-day synthesis product |
| SM | Status map |
| SPOT | Système Pour l’Observation de la Terre |
| SWIR | Short-wave infrared |
| T | Threshold test |
| TOA | Top-of-atmosphere |
| TOC | Top-of-canopy |
| UA | User’s accuracy |
| VAA | Viewing azimuth angle |
| VGT | Vegetation |
| VNIR | Visible and near infrared |
| VZA | Viewing zenith angle |
References
- Mellab, K.; Santandrea, S.; Francois, M.; Vrancken, D.; Gerrits, D.; Barnes, A.; Nieminen, P.; Willemsen, P.; Hernandez, S.; Owens, A.; et al. PROBA-V: An operational and technology demonstration mission-Results after decommissioning and one year of in-orbit exploitation. In Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Porto Pedro, Spain, 26–30 May 2014. [Google Scholar]
- Toté, C.; Swinnen, E.; Sterckx, S.; Clarijs, D.; Quang, C.; Maes, R. Evaluation of the SPOT/VEGETATION Collection 3 reprocessed dataset: Surface reflectances and NDVI. Remote Sens. Environ. 2017, 201, 219–233. [Google Scholar] [CrossRef]
- Maisongrande, P.; Duchemin, B.; Dedieu, G. VEGETATION/SPOT: An operational mission for the Earth monitoring; presentation of new standard products. Int. J. Remote Sens. 2004, 25, 9–14. [Google Scholar] [CrossRef]
- Dierckx, W.; Sterckx, S.; Benhadj, I.; Livens, S.; Duhoux, G.; Van Achteren, T.; Francois, M.; Mellab, K.; Saint, G. PROBA-V mission for global vegetation monitoring: Standard products and image quality. Int. J. Remote Sens. 2014, 35, 2589–2614. [Google Scholar] [CrossRef]
- Sterckx, S.; Benhadj, I.; Duhoux, G.; Livens, S.; Dierckx, W.; Goor, E.; Adriaensen, S.; Heyns, W.; Van Hoof, K.; Strackx, G.; et al. The PROBA-V mission: Image processing and calibration. Int. J. Remote Sens. 2014, 35, 2565–2588. [Google Scholar] [CrossRef]
- Wolters, E.; Dierckx, W.; Iordache, M.-D.; Swinnen, E. PROBA-V Products User Manual v3.0; VITO: Mol, Belgium, 2018. [Google Scholar]
- Lambert, M.J.; Waldner, F.; Defourny, P. Cropland mapping over Sahelian and Sudanian agrosystems: A Knowledge-based approach using PROBA-V time series at 100-m. Remote Sens. 2016, 8, 232. [Google Scholar] [CrossRef]
- Roumenina, E.; Atzberger, C.; Vassilev, V.; Dimitrov, P.; Kamenova, I.; Banov, M.; Filchev, L.; Jelev, G. Single- and multi-date crop identification using PROBA-V 100 and 300 m S1 products on Zlatia Test Site, Bulgaria. Remote Sens. 2015, 7, 13843–13862. [Google Scholar] [CrossRef]
- Shelestov, A.; Kolotii, A.; Camacho, F.; Skakun, S.; Kussul, O.; Lavreniuk, M.; Kostetsky, O. Mapping of biophysical parameters based on high resolution EO imagery for JECAM test site in Ukraine. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Baret, F.; Weiss, M. Algorithm Theoretical Basis Document—Leaf Area Index (LAI) Fraction of Absorbed Photosynthetically Active Radiation (FAPAR) Fraction of Green Vegetation Cover (FCover)-I2.01. GIO-GL Lot1, GMES Initial Operations. 2017. Available online: https://land.copernicus.eu/global/sites/cgls.vito.be/files/products/GIOGL1_ATBD_FAPAR1km-V1_I2.01.pdf (accessed on 25 February 2018).
- Meroni, M.; Fasbender, D.; Balaghi, R.; Dali, M.; Haffani, M.; Haythem, I.; Hooker, J.; Lahlou, M.; Lopez-Lozano, R.; Mahyou, H.; et al. Evaluating NDVI Data Continuity Between SPOT-VEGETATION and PROBA-V Missions for Operational Yield Forecasting in North African Countries. IEEE Trans. Geosci. Remote Sens. 2016, 54, 795–804. [Google Scholar] [CrossRef]
- Kempeneers, P.; Sedano, F.; Piccard, I.; Eerens, H. Data assimilation of PROBA-V 100 m and 300 m. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3314–3325. [Google Scholar] [CrossRef]
- Sánchez, J.; Camacho, F.; Lacaze, R.; Smets, B. Early validation of PROBA-V GEOV1 LAI, FAPAR and FCOVER products for the continuity of the copernicus global land service. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Arch. 2015, XL-7/W3, 93–100. [Google Scholar] [CrossRef]
- Lacaze, R.; Smets, B.; Baret, F.; Weiss, M.; Ramon, D.; Montersleet, B.; Wandrebeck, L.; Calvet, J.C.; Roujean, J.L.; Camacho, F. Operational 333 m biophysical products of the copernicus global land service for agriculture monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Arch. 2015, XL-7/W3, 53–56. [Google Scholar] [CrossRef]
- Goor, E.; Dries, J.; Daems, D.; Paepen, M.; Niro, F.; Goryl, P.; Mougnaud, P.; Della Vecchia, A. PROBA-V Mission Exploitation Platform. Remote Sens. 2016, 8, 564. [Google Scholar] [CrossRef]
- Sterckx, S.; Livens, S.; Adriaensen, S. Rayleigh, deep convective clouds, and cross-sensor desert vicarious calibration validation for the PROBA-V mission. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1437–1452. [Google Scholar] [CrossRef]
- Sterckx, S.; Adriaensen, S.; Dierckx, W.; Bouvet, M. In-Orbit Radiometric Calibration and Stability Monitoring of the PROBA-V Instrument. Remote Sens. 2016, 8, 546. [Google Scholar] [CrossRef]
- Sterckx, S.; Adriaensen, S. Degradation monitoring of the PROBA-V instrument. GSICS Q. 2017, 11, 5–6. [Google Scholar] [CrossRef]
- Govaerts, Y.; Sterckx, S.; Adriaensen, S. Use of simulated reflectances over bright desert target as an absolute calibration reference. Remote Sens. Lett. 2013, 4, 523–531. [Google Scholar] [CrossRef]
- Gutman, G.; Masek, J.G. Long-term time series of the Earth’s land-surface observations from space. Int. J. Remote Sens. 2012, 33, 4700–4719. [Google Scholar] [CrossRef]
- Lissens, G.; Kempeneers, P.; Fierens, F.; Van Rensbergen, J. Development of cloud, snow, and shadow masking algorithms for VEGETATION imagery. In Proceedings of the IEEE IGARSS Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.W.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The spectral image processing system (SIPS)—Interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Kirches, G.; Krueger, O.; Boettcher, M.; Bontemps, S.; Lamarche, C.; Verheggen, A.; Lembrée, C.; Radoux, J.; Defourny, P. Land Cover CCI-Algorithm Theoretical Basis Document; Version 2; UCL-Geomatics: London, UK, 2013. [Google Scholar]
- Muller, J.-P.; López, G.; Watson, G.; Shane, N.; Kennedy, T.; Yuen, P.; Lewis, P.; Fischer, J.; Guanter, L.; Domench, C.; et al. The ESA GlobAlbedo Project for mapping the Earth’s land surface albedo for 15 years from European sensors. Geophys. Res. Abstr. 2011, 13, EGU2011-10969. [Google Scholar]
- Eaton, B.; Gregory, J.; Drach, B.; Taylor, K.; Hankin, S.; Caron, J.; Signell, R.; Bentley, P.; Rappa, G.; Höck, H.; et al. NetCDF Climate and Forecast (CF) Metadata Conventions. Available online: http://cfconventions.org/cf-conventions/v1.6.0/cf-conventions.pdf (accessed on 26 March 2018).
- Eerens, H.; Baruth, B.; Bydekerke, L.; Deronde, B.; Dries, J.; Goor, E.; Heyns, W.; Jacobs, T.; Ooms, B.; Piccard, I.; et al. Ten-Daily Global Composites of METOP-AVHRR. In Proceedings of the Sixth International Symposium on Digital Earth: Data Processing and Applications, Beijing, China, 9–12 September 2009; pp. 8–13. [Google Scholar] [CrossRef]
- Krippendorff, K. Reliability in Content Analysis. Hum. Commun. Res. 2004, 30, 411–433. [Google Scholar] [CrossRef]
- Kerr, G.H.G.; Fischer, C.; Reulke, R. Reliability assessment for remote sensing data: Beyond Cohen’s kappa. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Ji, L.; Gallo, K. An agreement coefficient for image comparison. Photogramm. Eng. Remote Sens. 2006, 72, 823–833. [Google Scholar] [CrossRef]
- Hagolle, O. Effet d’un Changement d‘Heure de Passage sur les Séries Temporelles de Données de L’Instrument VEGETATION; CNES: Toulouse, France, 2007. [Google Scholar]
- Proud, S.R.; Fensholt, R.; Rasmussen, M.O.; Sandholt, I. A comparison of the effectiveness of 6S and SMAC in correcting for atmospheric interference of Meteosat Second Generation images. J. Geophys. Res. 2010, 115, D17209. [Google Scholar] [CrossRef]
- Proud, S.R.; Rasmussen, M.O.; Fensholt, R.; Sandholt, I.; Shisanya, C.; Mutero, W.; Mbow, C.; Anyamba, A. Improving the SMAC atmospheric correction code by analysis of Meteosat Second Generation NDVI and surface reflectance data. Remote Sens. Environ. 2010, 114, 1687–1698. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Creation Date | Start Validity | End Validity | Geometric Error Reduction (%) | |||
|---|---|---|---|---|---|---|
| Blue | Red | NIR | SWIR | |||
| 8 September 2016 | 1 September 2016 | −26.9 | −33.7 | −24.9 | −23.9 | |
| 16 February 2016 | 8 February 2016 | 1 September 2016 | −80.2 | −85.7 | −91.8 | −77.4 |
| 25 January 2016 | 19 January 2016 | 8 February 2016 | −38.9 | −46.0 | −35.6 | −29.3 |
| 2 November 2015 | 27 October 2015 | 19 January 2016 | −72.3 | −67.9 | −59.0 | −60.1 |
| 6 October 2015 | 3 October 2015 | 27 October 2015 | −34.9 | −42.7 | −36.7 | −34.9 |
| 9 July 2015 | 4 July 2015 | 3 October 2015 | −68.2 | −74.1 | −54.3 | −30.3 |
| 6 May 2015 | 20 April 2015 | 4 July 2015 | −74.7 | −84.0 | −102.8 | −93.7 |
| 24 March 2014 | 12 March 2014 | 20 April 2015 | −87.5 | −90.8 | −90.2 | −92.5 |
| 7 January 2014 | 1 January 2014 | 12 March 2014 | −75.3 | −93.5 | −110.3 | −98.6 |
| 9 November 2013 | 1 November 2013 | 1 January 2014 | N/A | N/A | N/A | N/A |
| 28 November 2013 | 16 October 2013 | 1 November 2013 | N/A | N/A | N/A | N/A |
| LEFT | CENTER | RIGHT | |
|---|---|---|---|
| VZA (VNIR) | >20° | <18° | >20° |
| VAA (VNIR) | <90° OR >270° | between 90° and 270° |
| Abbreviation | Metric | Formula 1 |
|---|---|---|
| GMR slope | Geometric mean regression slope | |
| GMR intercept | Geometric mean regression intercept | |
| R2 | Coefficient of determination | |
| MSD | Mean squared difference | |
| RMSD | Root-mean-squared difference | |
| RMPDu | Root of the unsystematic or random mean product difference | |
| RMPDs | Root of the systematic mean product difference | |
| MBE | Mean bias error |
| A. All surfaces, OA = 89.0%, α = 0.764 | ||||
| Validation database | ||||
| Cloud detection | Clear | Cloud | UA | CE |
| Clear | 13,095 | 1655 | 88.8% | 11.2% |
| Cloud | 2934 | 24,140 | 89.2% | 10.8% |
| PA | 81.7% | 93.6% | ||
| OE | 18.3% | 6.4% | ||
| B. Land, OA = 89.7%, α = 0.771 | ||||
| Validation database | ||||
| Cloud detection | Clear | Cloud | UA | CE |
| Clear | 8633 | 782 | 91.7% | 8.3% |
| Cloud | 2273 | 18,069 | 88.8% | 11.2% |
| PA | 79.2% | 95.9% | ||
| OE | 20.8% | 4.1% | ||
| C. Water, OA = 87.3%, α = 0.741 | ||||
| Validation database | ||||
| Cloud detection | Clear | Cloud | UA | CE |
| Clear | 4462 | 873 | 83.6% | 16.4% |
| Cloud | 661 | 6071 | 90.2% | 9.8% |
| PA | 87.1% | 87.4% | ||
| OE | 12.9% | 12.6% | ||
| Label | PROBA-V C0 S10-TOC 1 km | PROBA-V C1 S10-TOC 1 km | Difference |
|---|---|---|---|
| Clear | 79.3% | 74.0% | −5.4% |
| Not clear | 20.7% | 26.0% | |
| Missing | 6.3% | 6.3% | −0.0% |
| Cloud/shadow | 2.3% | 14.1% | +11.8% |
| Snow/ice | 12.1% | 5.6% | −6.5% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toté, C.; Swinnen, E.; Sterckx, S.; Adriaensen, S.; Benhadj, I.; Iordache, M.-D.; Bertels, L.; Kirches, G.; Stelzer, K.; Dierckx, W.; et al. Evaluation of PROBA-V Collection 1: Refined Radiometry, Geometry, and Cloud Screening. Remote Sens. 2018, 10, 1375. https://doi.org/10.3390/rs10091375
Toté C, Swinnen E, Sterckx S, Adriaensen S, Benhadj I, Iordache M-D, Bertels L, Kirches G, Stelzer K, Dierckx W, et al. Evaluation of PROBA-V Collection 1: Refined Radiometry, Geometry, and Cloud Screening. Remote Sensing. 2018; 10(9):1375. https://doi.org/10.3390/rs10091375
Chicago/Turabian StyleToté, Carolien, Else Swinnen, Sindy Sterckx, Stefan Adriaensen, Iskander Benhadj, Marian-Daniel Iordache, Luc Bertels, Grit Kirches, Kerstin Stelzer, Wouter Dierckx, and et al. 2018. "Evaluation of PROBA-V Collection 1: Refined Radiometry, Geometry, and Cloud Screening" Remote Sensing 10, no. 9: 1375. https://doi.org/10.3390/rs10091375
APA StyleToté, C., Swinnen, E., Sterckx, S., Adriaensen, S., Benhadj, I., Iordache, M.-D., Bertels, L., Kirches, G., Stelzer, K., Dierckx, W., Van den Heuvel, L., Clarijs, D., & Niro, F. (2018). Evaluation of PROBA-V Collection 1: Refined Radiometry, Geometry, and Cloud Screening. Remote Sensing, 10(9), 1375. https://doi.org/10.3390/rs10091375