A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery



Abstract
1. Introduction
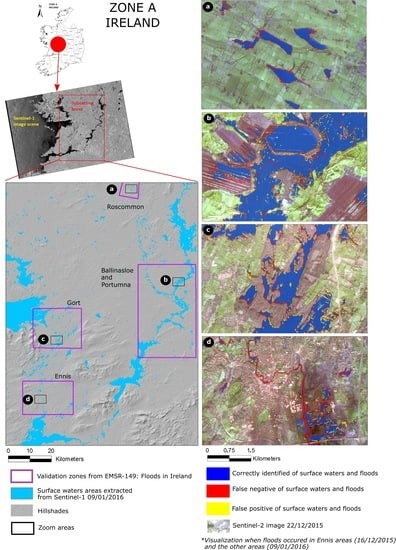
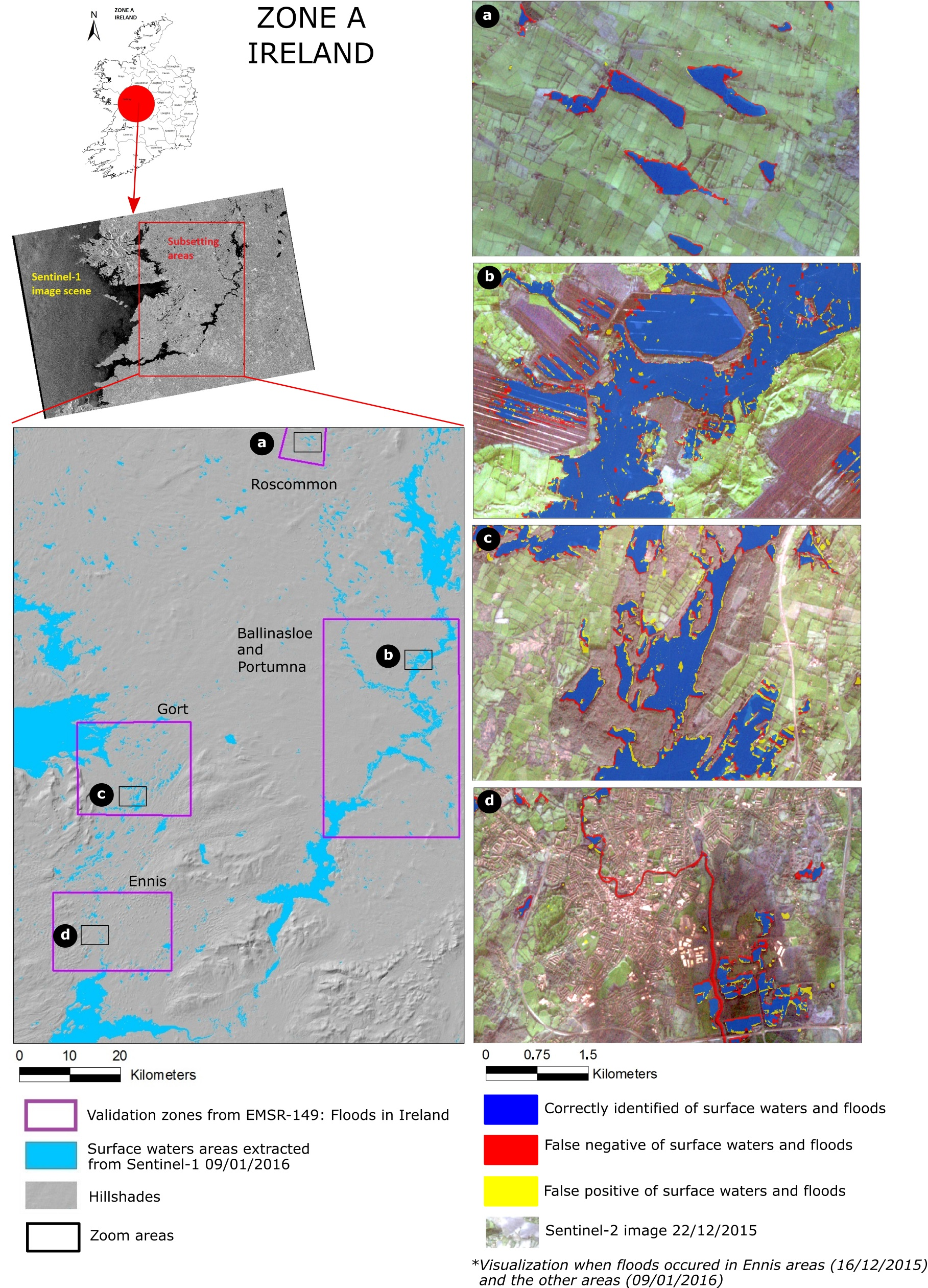
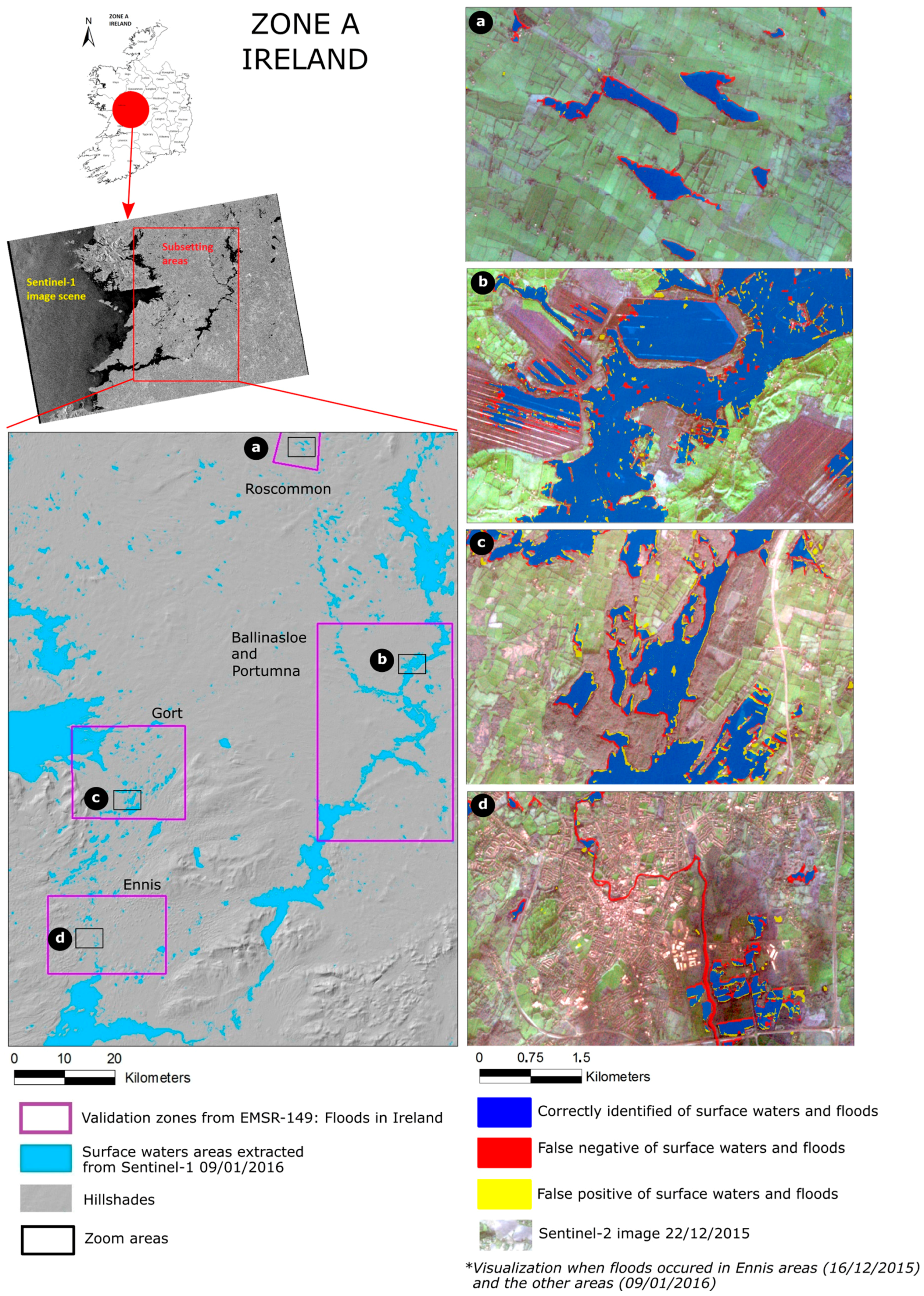
2. Study Areas and Datasets
3. Methods
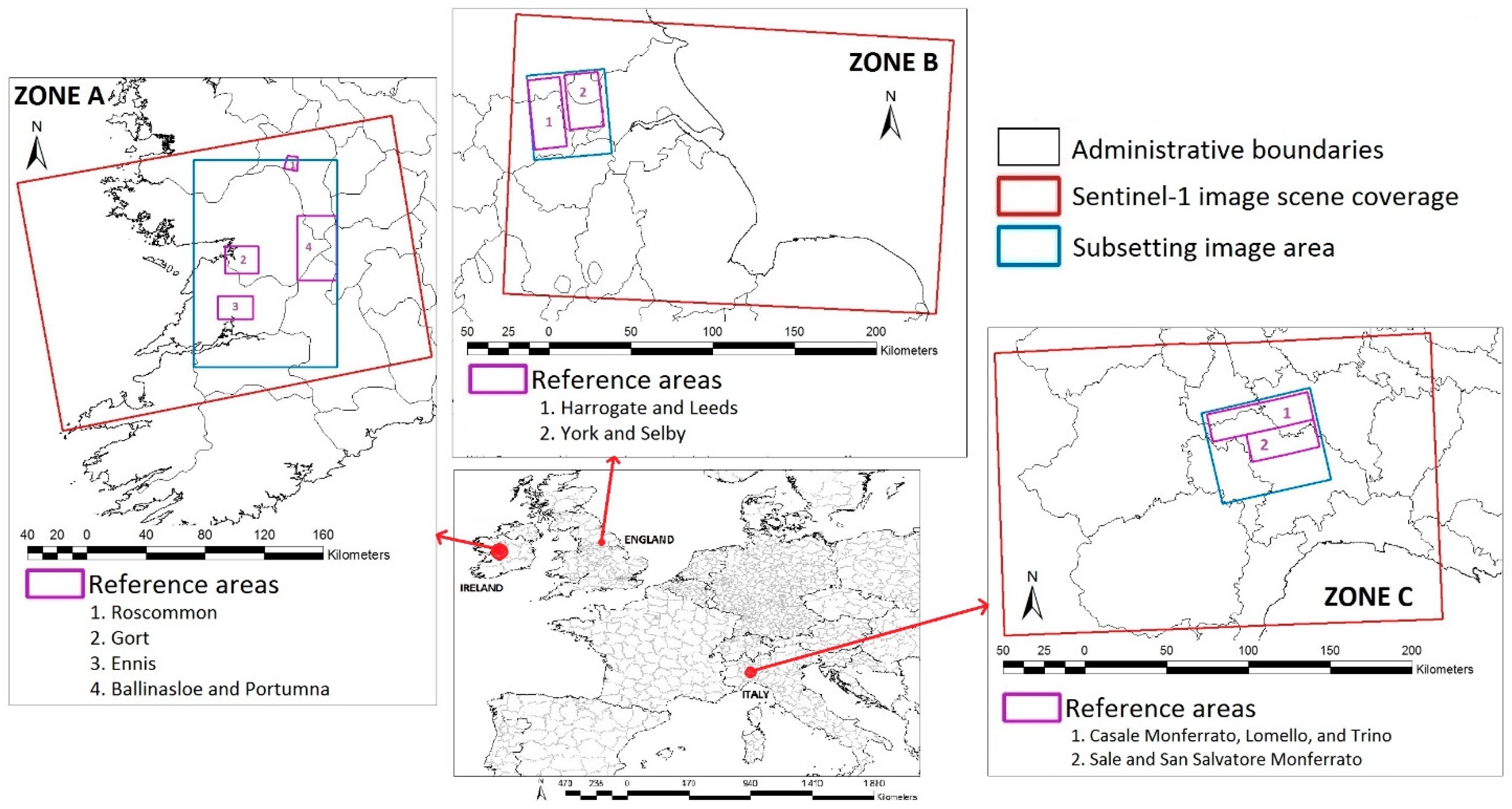
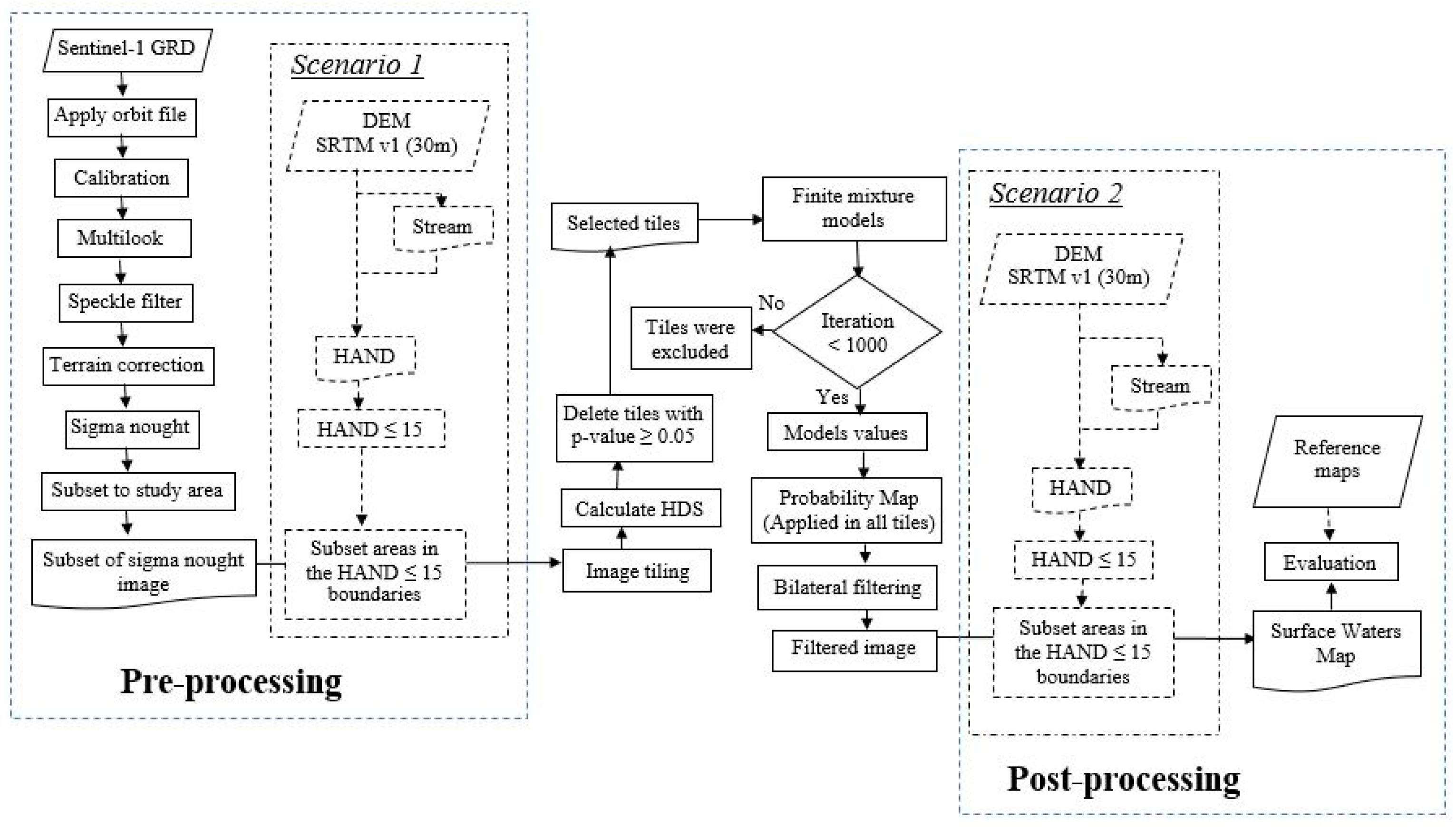
3.1. Processing Chain
3.1.1. Step 1: Pre-Processing
3.1.2. Step 2: Image Tiling Using a Modified Split-Based Approach (MSBA)
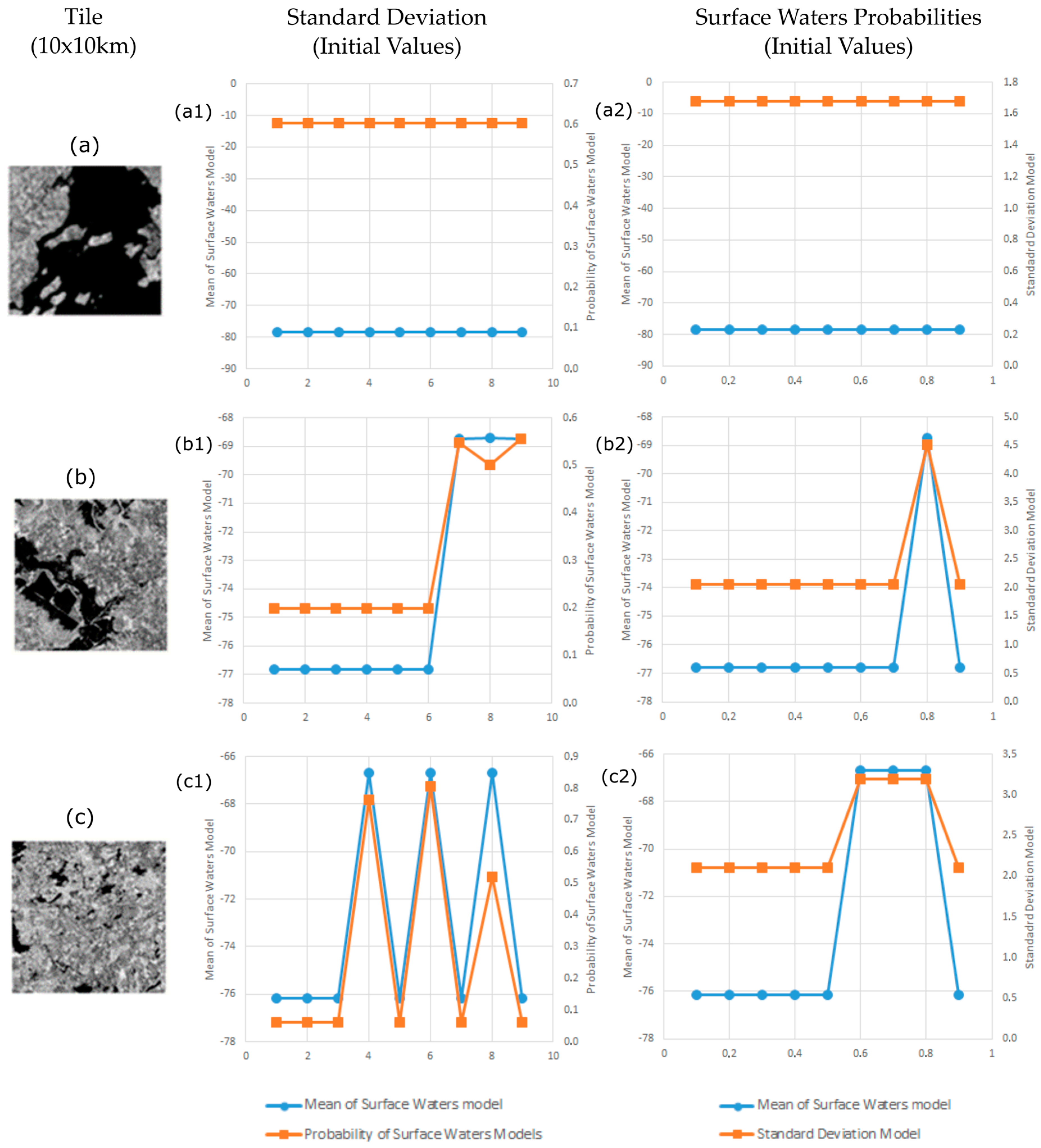
3.1.3. Step 3: Class Modelling with Finite Mixture Models (FMM)
3.1.4. Step 4: Smooth Labelling Using a Bilateral Filtering Approach
3.1.5. Step 5: Post-Processing
3.2. Comparison of Two Scenarios Using HAND Maps
3.2.1. Scenario 1: Use of HAND Maps in Pre-Processing
3.2.2. Scenario 2: Use of HAND Maps in Post-Processing
3.3. Sensitivity Analysis of Tile Size Used in Tiling Approach
4. Results
4.1. Influence of FMM Parameters Values
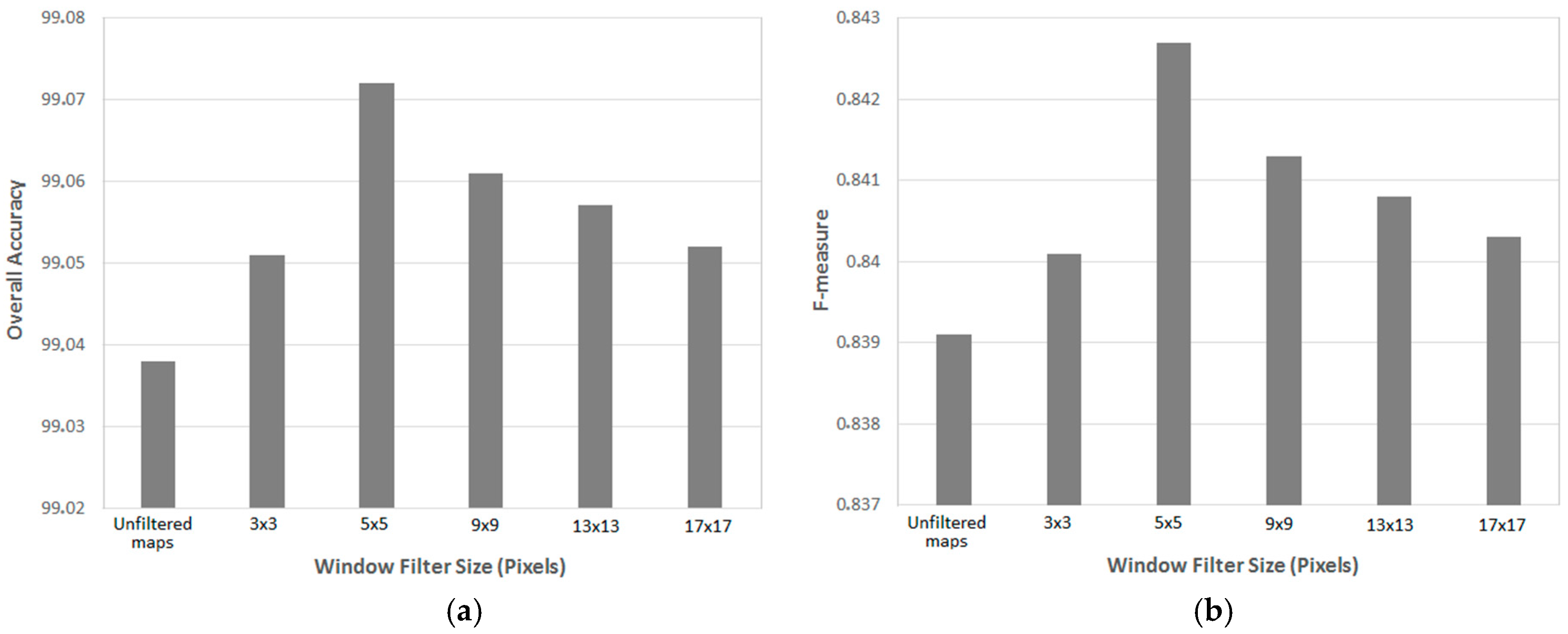
4.2. Sensitivity of Bilateral Filtering Parameter
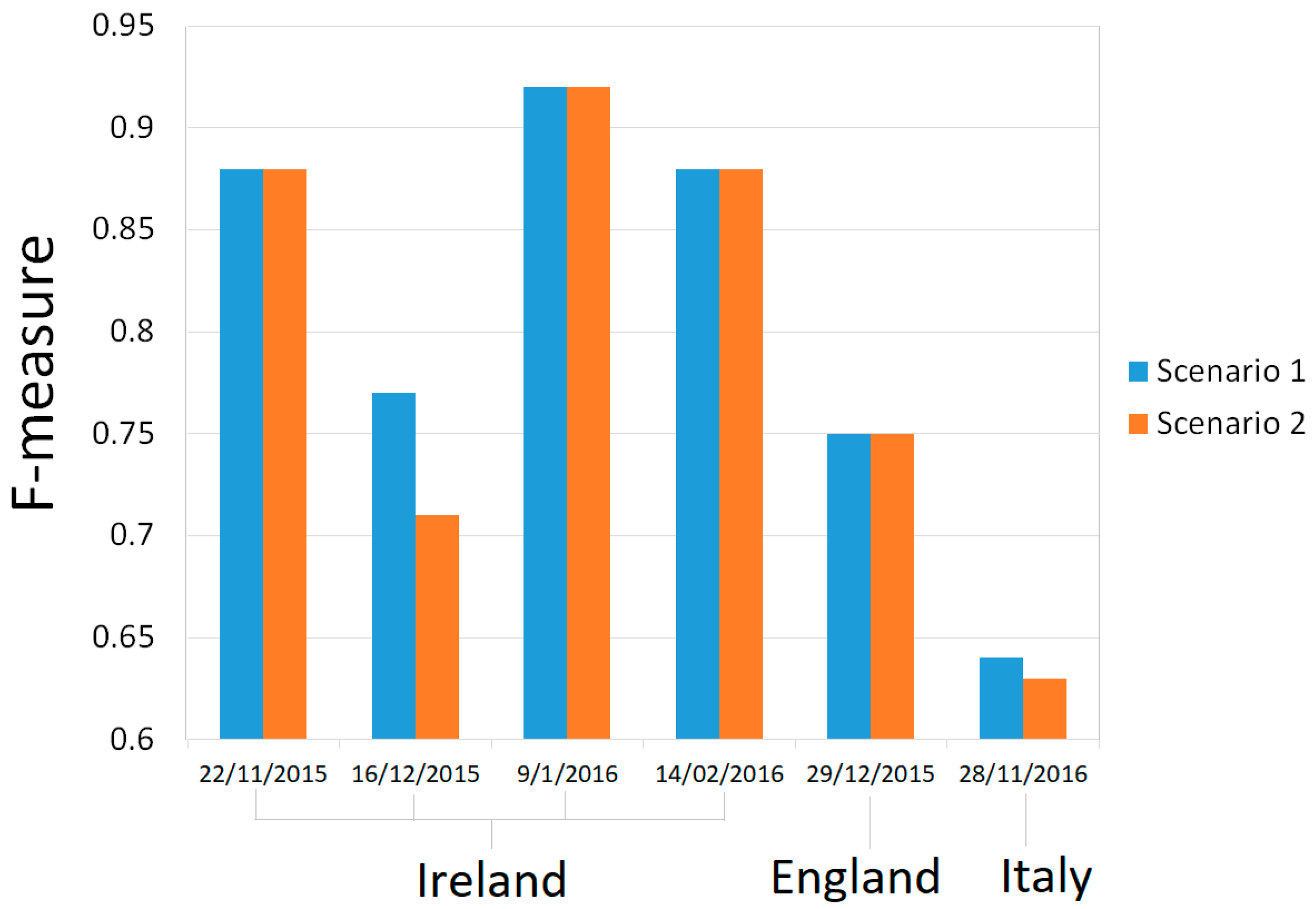
4.3. Results Comparison between Scenario 1 and Scenario 2
4.4. Sensitivity of Tile Size in MSBA and FMM Steps
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sanyal, J.; Lu, X.X. Application of remote sensing in flood management with special reference to monsoon Asia: A review. Nat. Hazards 2004, 33, 283–301. [Google Scholar] [CrossRef]
- Voigt, S.; Kemper, T.; Riedlinger, T.; Kiefl, R.; Scholte, K.; Mehl, H. Satellite Image Analysis for Disaster and Crisis-Management Support. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1520–1528. [Google Scholar] [CrossRef]
- Matgen, P.; Montanari, M.; Hostache, R.; Pfister, L.; Hoffmann, L.; Plaza, D.; Pauwels, V.R.; De Lannoy, G.; De Keyser, R.; Savenije, H.H. Towards the sequential assimilation of SAR-derived water stages into hydraulic models using the Particle Filter: Proof of concept. Hydrol. Earth Syst. Sci. 2010, 14, 1773–1785. [Google Scholar] [CrossRef]
- Pappenberger, F.; Frodsham, K.; Beven, K.; Romanowicz, R.; Matgen, P. Fuzzy set approach to calibrating distributed flood inundation models using remote sensing observations. Hydrol. Earth Syst. Sci. Discuss. 2007, 11, 739–752. [Google Scholar] [CrossRef]
- Schumann, G.; di Baldassarre, G.; Bates, P.D. The Utility of Spaceborne Radar to Render Flood Inundation Maps Based on Multialgorithm Ensembles. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2801–2807. [Google Scholar] [CrossRef]
- De Moel, H.; van Alphen, J.; Aerts, J. Flood Maps in Europe-Methods, Availability and Use. Nat. Hazards Earth Syst. Sci. 2009, 9, 289–301. [Google Scholar] [CrossRef]
- Brakenridge, G.R.; Anderson, E. MODIS-based flood detection, mapping, and measurement: The potential for operational hydrological applications. In Transboundary Floods: Reducing Risks through Flood Management; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Ottinger, M.; Kuenzer, C.; Liu, G.; Wang, S.; Dech, S. Monitoring land cover dynamics in the Yellow River Delta from 1995 to 2010 based on Landsat 5 TM. Appl. Geogr. 2013, 44, 53–68. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A. Optical remote mapping of rivers at sub-meter resolutions and watershed extents. Earth Surf. Process. Landf. 2008, 33, 4–24. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A. A Hierarchical Spatio-Temporal Markov Model for Improved Flood Mapping Using Multi-Temporal X-Band SAR Data. Remote Sens. 2010, 2, 2240–2258. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Chini, M.; Guerriero, L.; Candela, L. Observing floods from space: Experience gained from COSMO-SkyMed observations. Acta Astronaut. 2013, 84, 122–133. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Twele, A.; Martinis, S.; Cao, W.; Plank, S. Inundation mapping using C- and X-band SAR data: From algorithms to fully-automated flood services. In Proceedings of the Mapping Water Bodies from Space (MWBS 2015), Frascati, Italy, 18–19 March 2015; Volume 46–47. [Google Scholar]
- Chapman, B.; McDonald, K.; Shimada, M.; Rosenqvist, A.; Schroeder, R.; Hess, L. Mapping Regional Inundation with Spaceborne L-Band SAR. Remote Sens. 2015, 7, 5440–5470. [Google Scholar] [CrossRef]
- De Roo, A.; van der Knijff, J.; Horritt, M.; Schmuck, G.; de Jong, S. Assessing Flood Damages of the 1997 Oder Flood and the 1995 Meuse Flood. In Proceedings of the 2nd International Symposium on Operationalization of Remote Sensing, Enschede, The Netherlands, 16–20 August 1999. [Google Scholar]
- Martinis, S.; Twele, A.; Voigt, S. Unsupervised Extraction of Flood-Induced Backscatter Changes in SAR Data Using Markov Image Modeling on Irregular Graphs. IEEE Trans. Geosci. Remote Sens. 2011, 49, 251–263. [Google Scholar] [CrossRef]
- Bartsch, A.; Trofaier, A.M.; Hayman, G.; Sabel, D.; Schlaffer, S.; Clark, D.B.; Blyth, E. Detection of open water dynamics with ENVISAT ASAR in support of land surface modelling at high latitudes. Biogeosciences 2012, 9, 703–714. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Muster, S.; Heim, B.; Abnizova, A.; Boike, J. Water Body Distributions across Scales: A Remote Sensing Based Comparison of Three Arctic TundraWetlands. Remote Sens. 2013, 5, 1498–1523. [Google Scholar] [CrossRef]
- Evans, T.L.; Costa, M.; Telmer, K.; Silva, T.S.F. Using ALOS/PALSAR and RADARSAT-2 to Map Land Cover and Seasonal Inundation in the Brazilian Pantanal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 560–575. [Google Scholar] [CrossRef]
- Simon, R.N.; Tormos, T.; Danis, P.A. Geographic object based image analysis using very high spatial and temporal resolution radar and optical imagery in tracking water level fluctuations in a freshwater reservoir. South-East. Eur. J. Earth Obs. Geomat. 2014, 3, 287. [Google Scholar]
- Martinez, J.M.; Toan, T.L. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Mitchell, A.L.; Milne, A.K.; Tapley, I. Towards an operational SAR monitoring system for monitoring environmental flows in the Macquarie Marshes. Wetl. Ecol. Manag. 2015, 23, 61–77. [Google Scholar] [CrossRef]
- Martinis, S. Automatic Near Real-Time Flood Detection in High Resolution X-Band Synthetic Aperture Radar Satellite Data Using Context-Based Classification on Irregular Graphs. Ph.D. Thesis, LMU Munich, München, Germany, 2010. [Google Scholar]
- Schumann, G.J.-P.; Moller, D.K. Microwave remote sensing of flood inundation. Phys. Chem. Earth Parts ABC 2015, 83, 84–95. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Marzano, F.S.; Pierdicca, N.; Mori, S.; Guerriero, L.; Boni, G.; Candela, L. Detection of floods and heavy rain using Cosmo-SkyMed data: The event in Northwestern Italy of November 2011. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22 July 2012; pp. 3026–3029. [Google Scholar]
- Schlaffer, S.; Hollaus, M.; Wagner, W.; Matgen, P. Flood delineation from synthetic aperture radar data with the help of a priori knowledge from historical acquisitions and digital elevation models in support of near-real-time flood mapping. In Proceedings of the SPIE, Earth Resources and Environmental Remote Sensing/GIS Applications III, Edinburgh, UK, 14 November 2012; pp. 853813-1–853813-9. [Google Scholar]
- Westerhoff, R.S.; Kleuskens, M.P.H.; Winsemius, H.C.; Huizinga, H.J.; Brakenridge, G.R.; Bishop, C. Automated global water mapping based on wide-swath orbital synthetic-aperture radar. Hydrol. Earth Syst. Sci. 2013, 17, 651–663. [Google Scholar] [CrossRef]
- Huth, J.; Ahrens, M.; Klein, I.; Gessner, U.; Hoffmann, J.; Künzer, C. WaMaPro—A user friendly tool for water surface derivation from SAR data and further products derived from optical data. In Proceedings of the ESA Mapping Water Bodies from Space Conference 2015, Frascati, Italy, 18–19 March 2015. [Google Scholar]
- Martinis, S.; Kuenzer, C.; Wendleder, A.; Huth, J.; Twele, A.; Roth, A.; Dech, S. Comparing four operational SAR-based water and flood detection approaches. Int. J. Remote Sens. 2015, 36, 3519–3543. [Google Scholar] [CrossRef]
- Short, N.; Brisco, B.; Landry, R.; Raymond, D.; van der Sanden, J. A Semi-automated tool for surface water mapping with RADARSAT-1. Can. J. Remote Sens. 2009, 35, 336–344. [Google Scholar]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection: Multi-temporal SAR flood mapping using change detection. J. Flood Risk Manag. 2017. [Google Scholar] [CrossRef]
- Martinis, S. Improving flood mapping in arid areas using Sentinel-1 time series data. In Proceedings of the 2017 International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 193–196. [Google Scholar]
- Schindler, K. An Overview and Comparison of Smooth Labeling Methods for Land-Cover Classification. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4534–4545. [Google Scholar] [CrossRef]
- Rennó, C.D.; Nobre, A.D.; Cuartas, L.A.; Soares, J.V.; Hodnett, M.G.; Tomasella, J.; Waterloo, M.J. HAND, a new terrain descriptor using SRTM-DEM: Mapping terra-firme rainforest environments in Amazonia. Remote Sens. Environ. 2008, 112, 3469–3481. [Google Scholar] [CrossRef]
- Met Éireann. Monthly Weather Bulletin; Met Éireann: Dublin, Ireland, 2015; No. 355. [Google Scholar]
- British Geological Survey; Centre for Ecology & Hydrology. Hydrological Summary for United Kingdom; British Geological Survey: Nottingham, UK; Centre for Ecology & Hydrology: Bailrigg, UK, 2015.
- Copernicus. Copernicus Emergency Management Service Activated for Floods in Northern Italy. 28 November 2016. Available online: http://copernicus.eu/news/copernicus-emergency-management-service-activated-floods-northern-italy (accessed on 1 June 2017).
- ESA. Copernicus Open Access Hub. 2014. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 15 November 2015).
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef]
- USGS. USGS Earth Explorer. Available online: http://earthexplorer.usgs.gov (accessed on 15 November 2015).
- Copernicus. Copernicus Emergency Management Service—Mapping; European Union: Brussels, Belgium, 2018. [Google Scholar]
- Benaglia, T.; Chauveau, D.; Hunter, D.; Young, D. mixtools: An R package for analyzing finite mixture models. J. Stat. Softw. 2009, 32, 1–29. [Google Scholar] [CrossRef]
- Foumelis, M. ESA Sentinel-1 Toolbox Generation of SAR Backscattering Mosaics, Course Materials. In Proceedings of the 6th ESA Advanced Training Course on Land Remote Sensing, Bucharest, Romania, 14 September 2015. [Google Scholar]
- Stewart, C. Exercise Sentinel-1 Processing, Course Materials. In Proceedings of the 8th ESA Training Course on Radar and Optical Remote Sensing, Cesis, Latvia, 5 September 2016. [Google Scholar]
- Lee, H.; Yuan, T.; Jung, H.C.; Beighley, E. Mapping wetland water depths over the central Congo Basin using PALSAR ScanSAR, Envisat altimetry, and MODIS VCF data. Remote Sens. Environ. 2015, 159, 70–79. [Google Scholar] [CrossRef]
- O’Grady, D.; Leblanc, M.; Bass, A. The use of radar satellite data from multiple incidence angles improves surface water mapping. Remote Sens. Environ. 2014, 140, 652–664. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A Split-Based Approach to Unsupervised Change Detection in Large-Size Multitemporal Images: Application to Tsunami-Damage Assessment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1658–1670. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. SAR-based flood mapping combining hierarchical split-based approach and change detection. In Proceedings of the IEEE IGARSS 2015, Milan, Italy, 26–31 July 2015. [Google Scholar]
- Freeman, J.B.; Dale, R. Assessing bimodality to detect the presence of a dual cognitive process. Behav. Res. Methods 2013, 45, 83–97. [Google Scholar] [CrossRef] [PubMed]
- Bazi, Y.; Bruzzone, L.; Melgani, F. Image thresholding based on the EM algorithm and the generalized Gaussian distribution. Pattern Recognit. 2007, 40, 619–634. [Google Scholar] [CrossRef]
- Van Rijsbergen, C.J. Information Retrieval, 2nd ed.; Butterworths: London, UK, 1979. [Google Scholar]
- Donchyts, G.; Winsemius, H.; Schellekens, J.; Erickson, T.; Gao, H.; Savenije, H.; van de Giesen, N. Global 30 m Height Above the Nearest Drainage. In Proceedings of the EGU General Assembly 2016, Vienna, Austria, 17–22 April 2016. [Google Scholar]
- Montgomery, D.R.; Dietrich, W.E. Where do channels begin? Nature 1988, 336, 232–234. [Google Scholar] [CrossRef]
- Wendleder, A.; Wessel, B.; Roth, A.; Breunig, M.; Martin, K.; Wagenbrenner, S. TanDEM-X Water Indication Mask: Generation and First Evaluation Results. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 171–179. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Occasion | SAR Acquisition Mode | ||
|---|---|---|---|---|
| Zone | Image Acquisition | Information | ||
| 1 | Zone A (Ireland) | 22 November 2015 | Before floods | Ascending |
| 2 | 16 December 2015 | Floods occurred | Ascending | |
| 3 | 9 January 2016 | Floods occurred | Ascending | |
| 4 | 14 February 2016 | After floods | Ascending | |
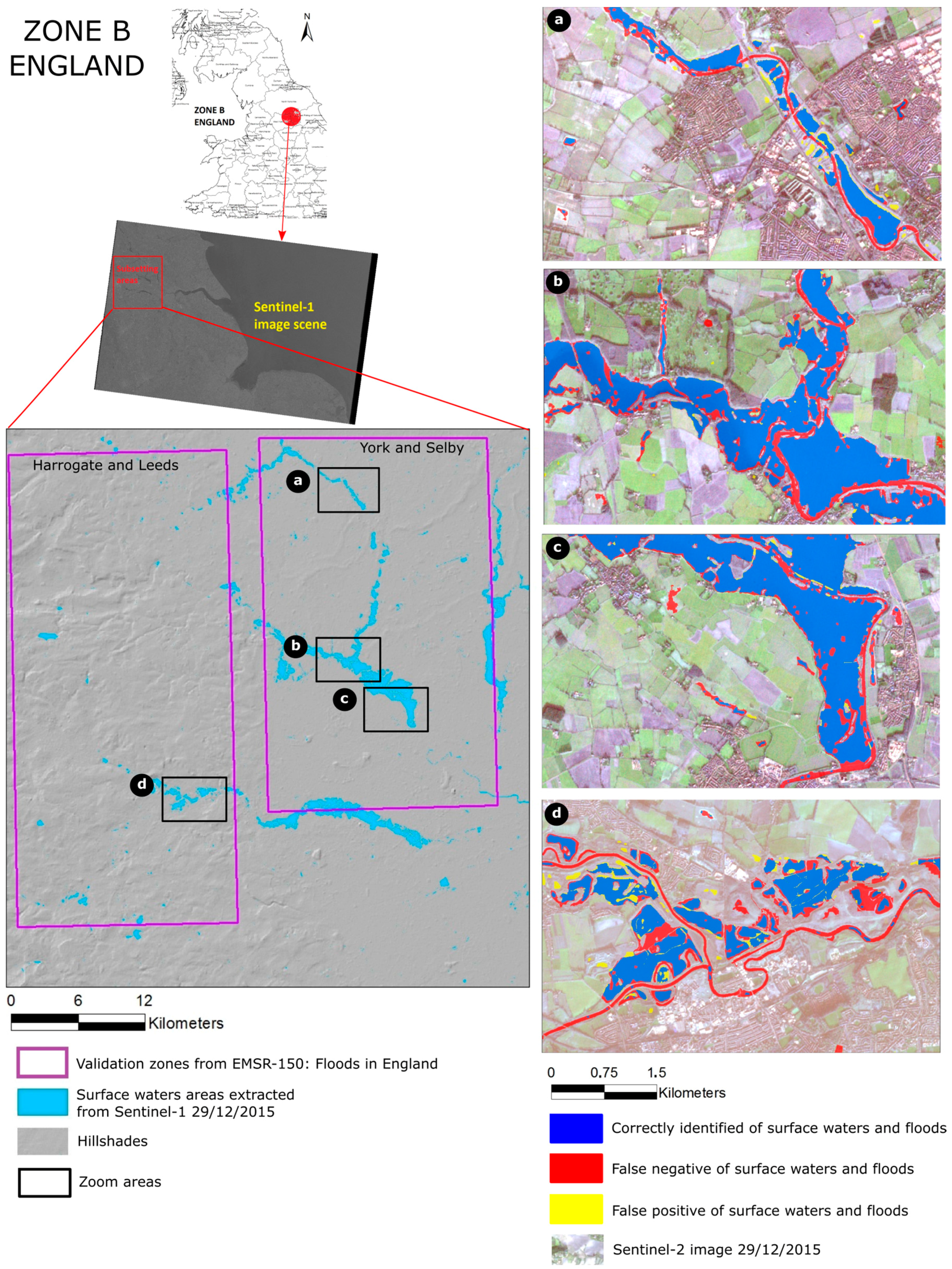
| 5 | Zone B (England) | 29 December 2015 | Floods occurred | Descending |
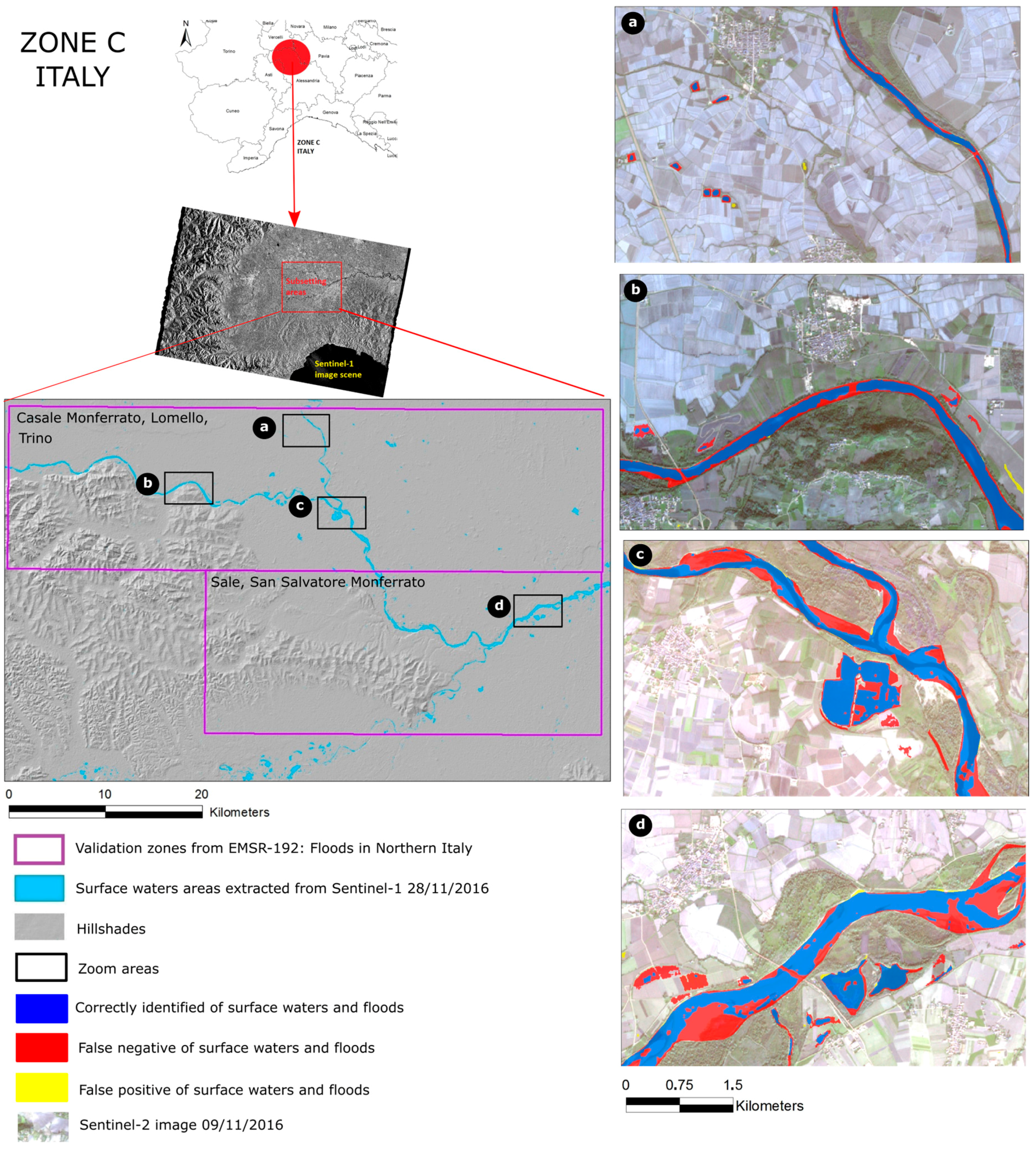
| 6 | Zone C (Italy) | 28 November 2016 | Floods occurred | Ascending |
| Evaluation | 22 November 2015 | 16 December 2015 | 09 January 2016 | 14 February 2016 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 km | 5 km | 2.5 km | 10 km | 5 km | 2.5 km | 10 km | 5 km | 2.5 km | 10 km | 5 km | 2.5 km | |
| Overall accuracy | 99.41% | 99.40% | 99.40% | 98.68% | 98.68% | 98.68% | 98.68% | 98.67% | 98.66% | 99.35% | 99.36% | 99.38% |
| F-measure | 0.88 | 0.88 | 0.88 | 0.77 | 0.77 | 0.78 | 0.92 | 0.92 | 0.92 | 0.88 | 0.88 | 0.88 |
| TPR | 81.27% | 81.65% | 81.44% | 66.96% | 67.04% | 67.83% | 89.67% | 89.42% | 89.18% | 86.42% | 86.26% | 86.51% |
| FPR | 0.09% | 0.10% | 0.10% | 0.22% | 0.22% | 0.24% | 0.47% | 0.45% | 0.44% | 0.29% | 0.27% | 0.31% |
| Omission error | 18.73% | 18.35% | 18.56% | 33.04% | 32.96% | 32.17% | 10.32% | 10.58% | 10.82% | 13.58% | 13.74% | 13.49% |
| Commission error | 3.79% | 4.29% | 4.06% | 8.54% | 8.60% | 9.31% | 5.26% | 5.10% | 4.96% | 10.80% | 10.22% | 11.29% |
| Evaluation | England 29 December 2015 | Italy 28 November 2016 | ||||
|---|---|---|---|---|---|---|
| 10 km | 10 km | 5 km | 2.5 km | 5 km | 2.5 km | |
| Overall accuracy | 98.40% | 98.68% | 98.75% | 98.75% | 98.42% | 98.40% |
| F-measure | 0.75 | 0.64 | 0.66 | 0.7 | 0.76 | 0.76 |
| TPR | 62.44% | 48.51% | 52.11% | 61.05% | 66.13% | 67.36% |
| FPR | 0.15% | 0.10% | 0.11% | 0.33% | 0.28% | 0.36% |
| Omission error | 37.56% | 51.49% | 47.89% | 38.95% | 33.87% | 32.64% |
| Commission error | 5.72% | 7.50% | 8.15% | 18.17% | 9.57% | 11.64% |
| Study Area | Image Date | Event | Overall Accuracy | F-Measure | True Positive Rate | False Positive Rate | Omission Error | Commission Error |
|---|---|---|---|---|---|---|---|---|
| Zone A (Ireland) | 22 November 2015 | Before floods | 99.41% | 0.88 | 81.27% | 0.09% | 18.73% | 3.79% |
| 16 December 2015 | Floods occurred | 98.68% | 0.77 | 66.96% | 0.22% | 33.04% | 8.54% | |
| 09 January 2016 | Floods occurred | 98.68% | 0.92 | 89.67% | 0.47% | 10.32% | 5.26% | |
| 14 February 2016 | After floods | 99.35% | 0.88 | 86.42% | 0.29% | 13.58% | 10.80% | |
| Zone B (England) | 29 December 2015 | Floods occurred | 98.40% | 0.75 | 62.44% | 0.15% | 37.56% | 5.726 |
| Zone C (Italy) | 28 November 2016 | Floods occurred | 98.68% | 0.64 | 48.51% | 0.10% | 51.49% | 7.50% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.-P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sens. 2018, 10, 217. https://doi.org/10.3390/rs10020217
Bioresita F, Puissant A, Stumpf A, Malet J-P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sensing. 2018; 10(2):217. https://doi.org/10.3390/rs10020217
Chicago/Turabian StyleBioresita, Filsa, Anne Puissant, André Stumpf, and Jean-Philippe Malet. 2018. "A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery" Remote Sensing 10, no. 2: 217. https://doi.org/10.3390/rs10020217
APA StyleBioresita, F., Puissant, A., Stumpf, A., & Malet, J.-P. (2018). A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sensing, 10(2), 217. https://doi.org/10.3390/rs10020217