From Photons to Pixels: Processing Data from the Advanced Baseline Imager

 , and
, and
Abstract
:1. Introduction
- Uncompressed to detector sample values
- Radiometric calibration is applied
- Calibrated detector values are navigated to Earth location
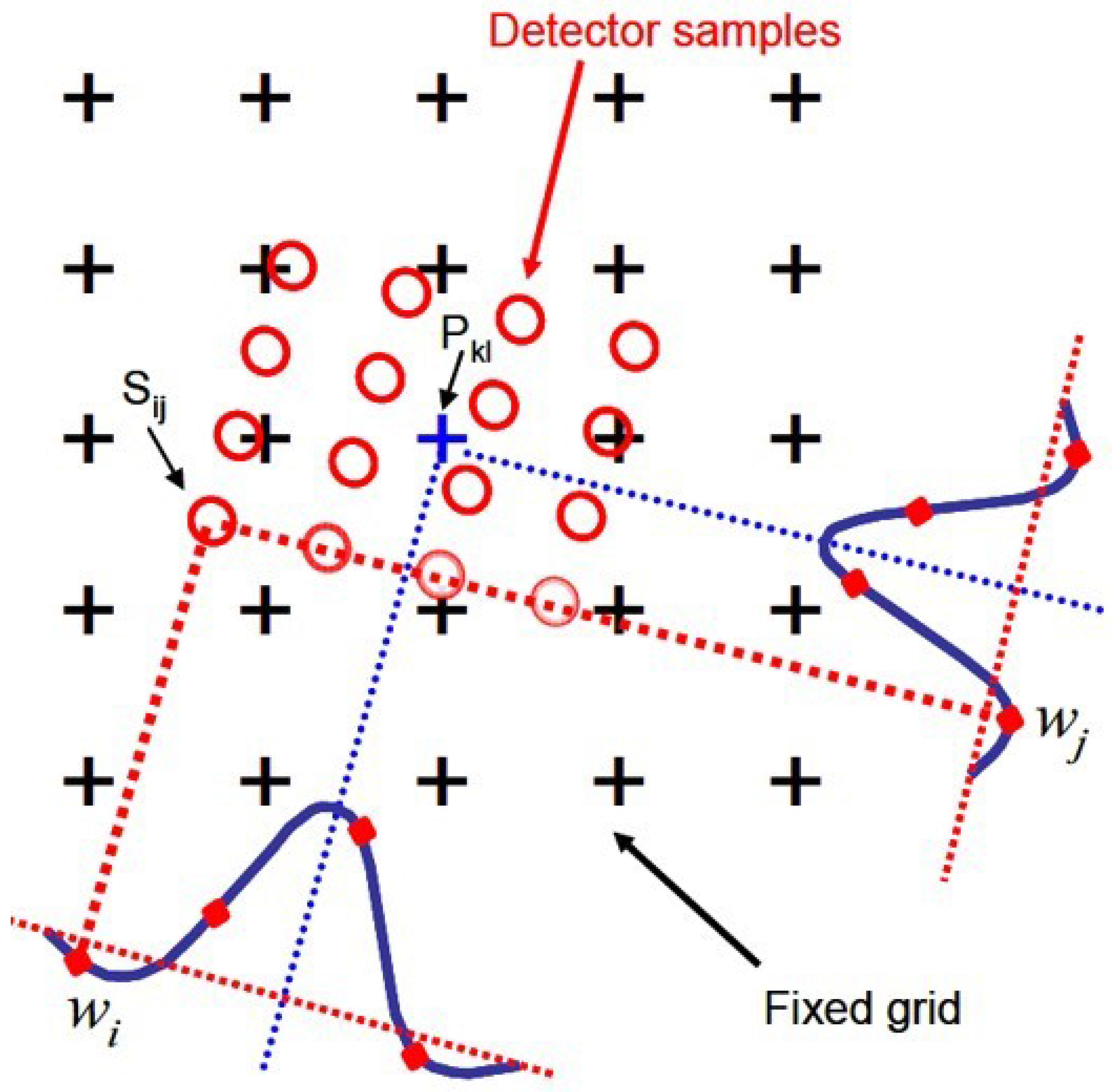
- Calibrated and navigated values are re-sampled to form pixels
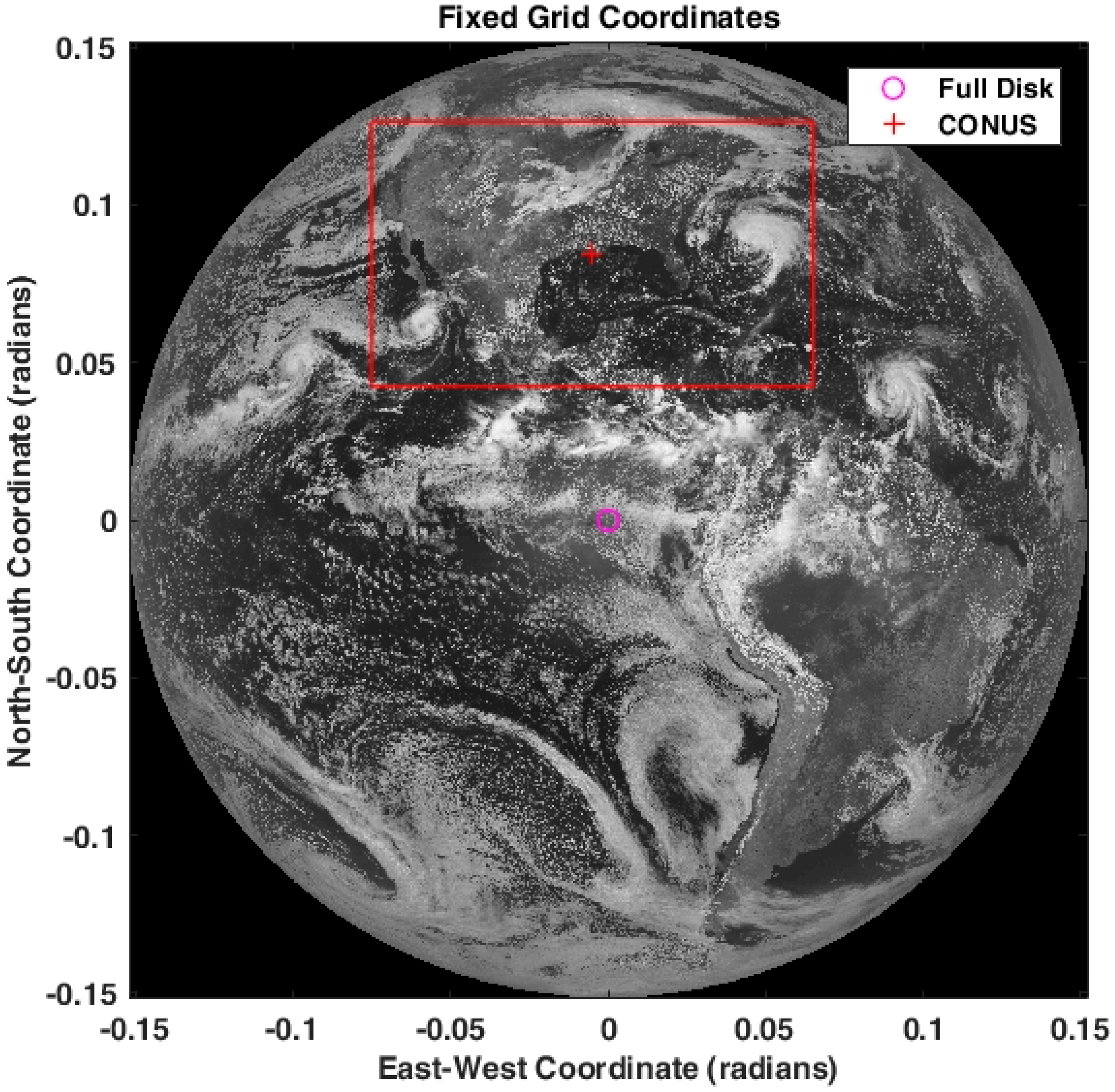
- Images are generated in the GOES fixed grid angular coordinate projection
2. ABI Data Collection Approach and Operations
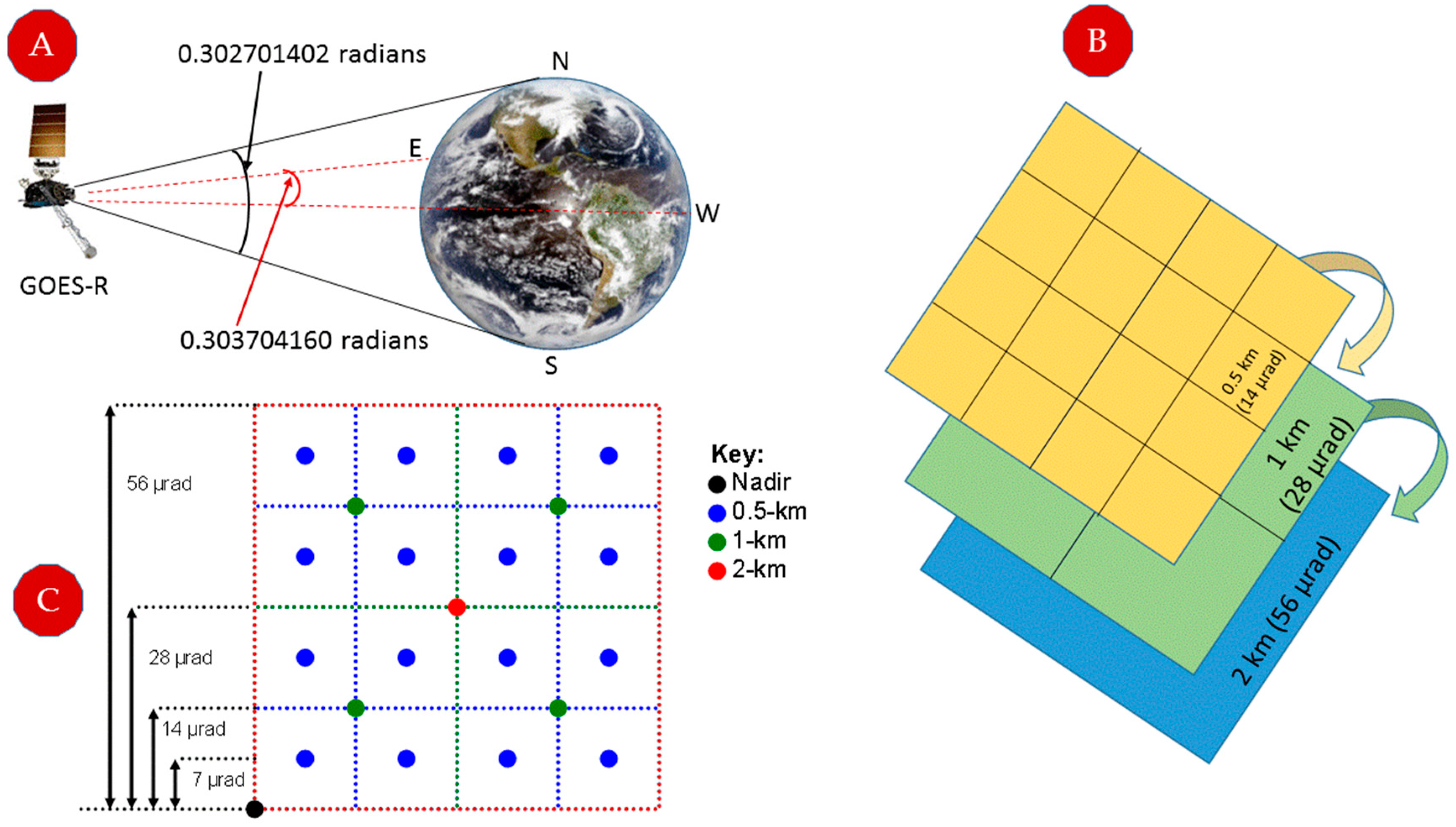
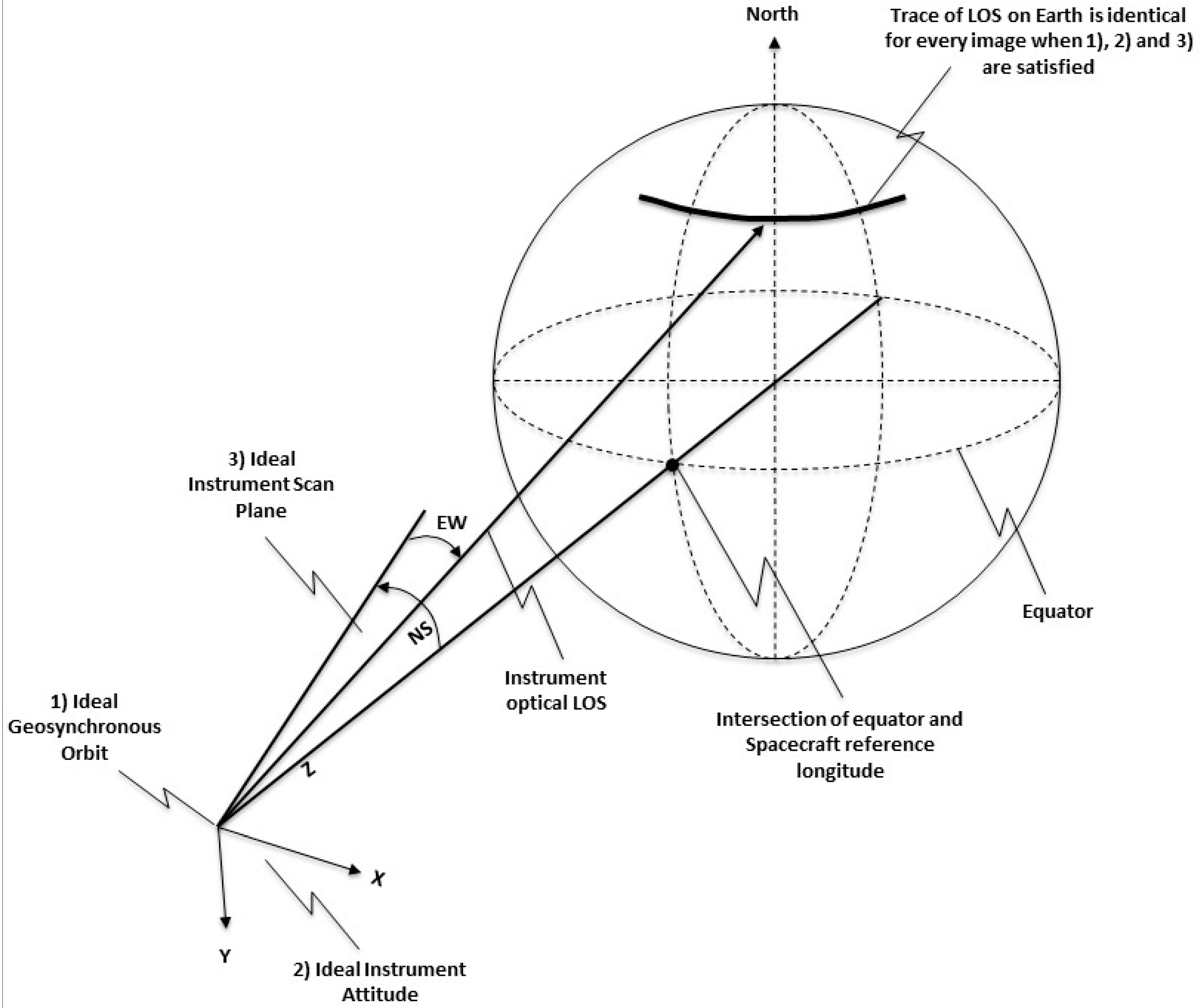
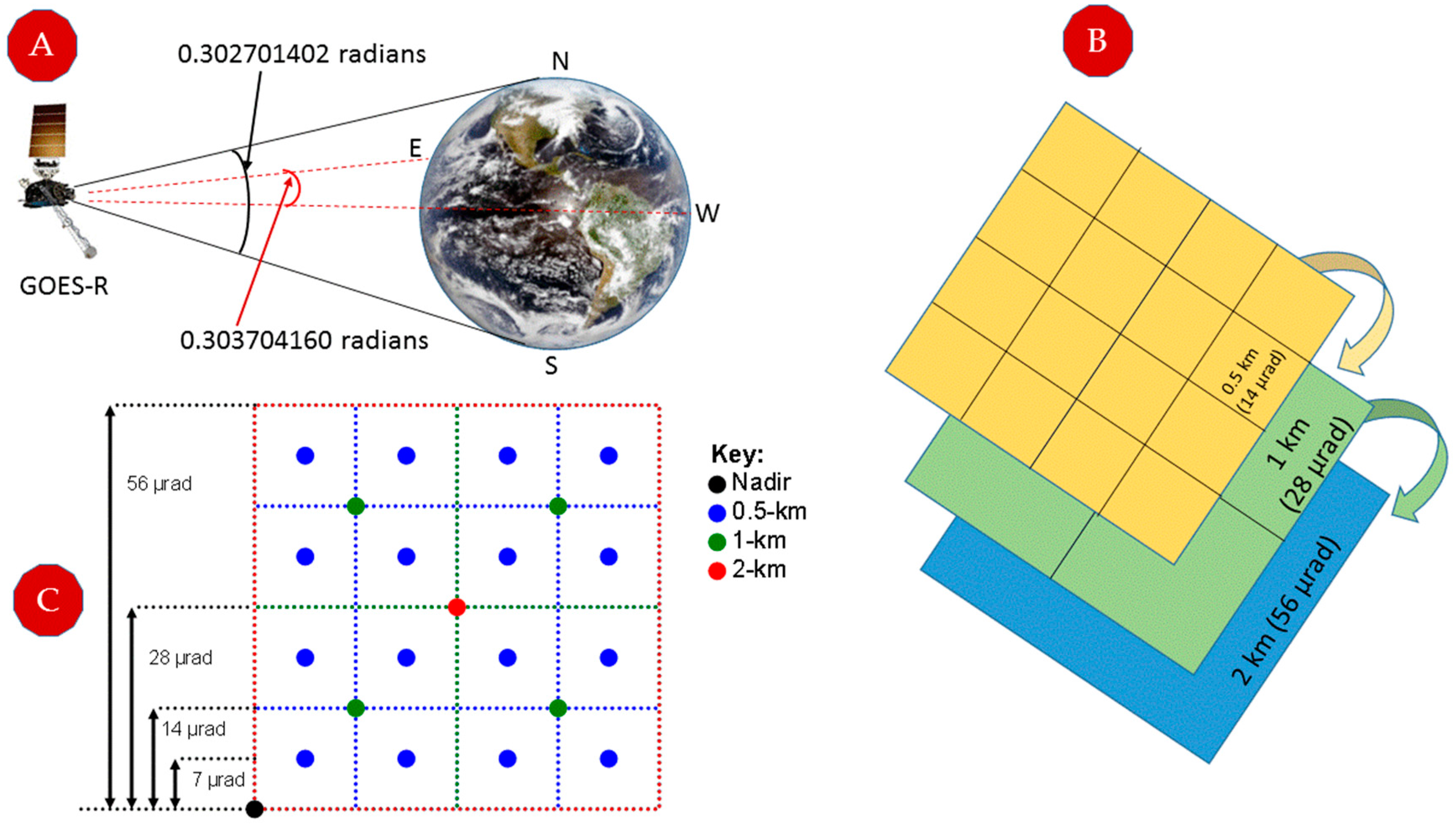
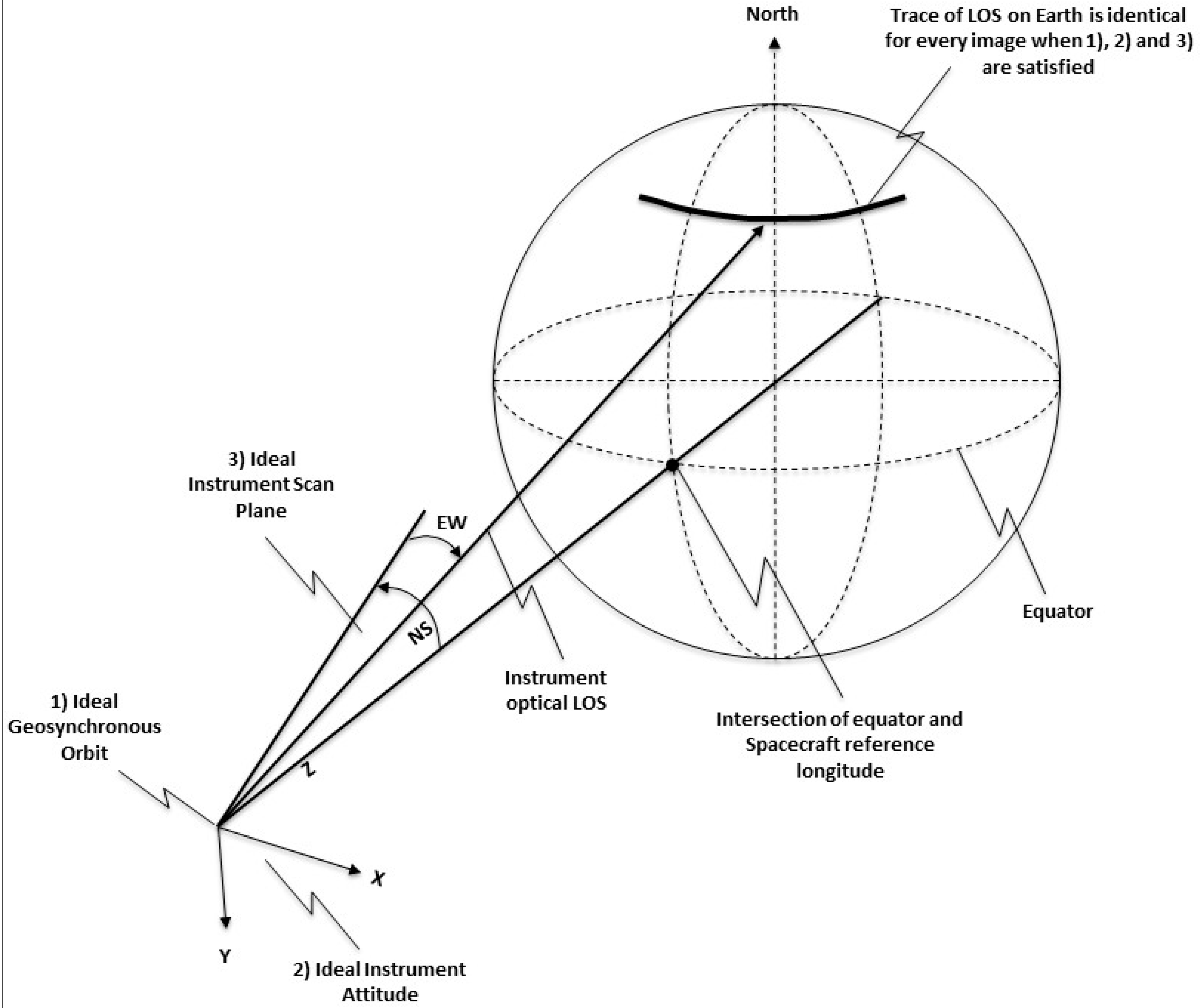
2.1. Observation of the Earth
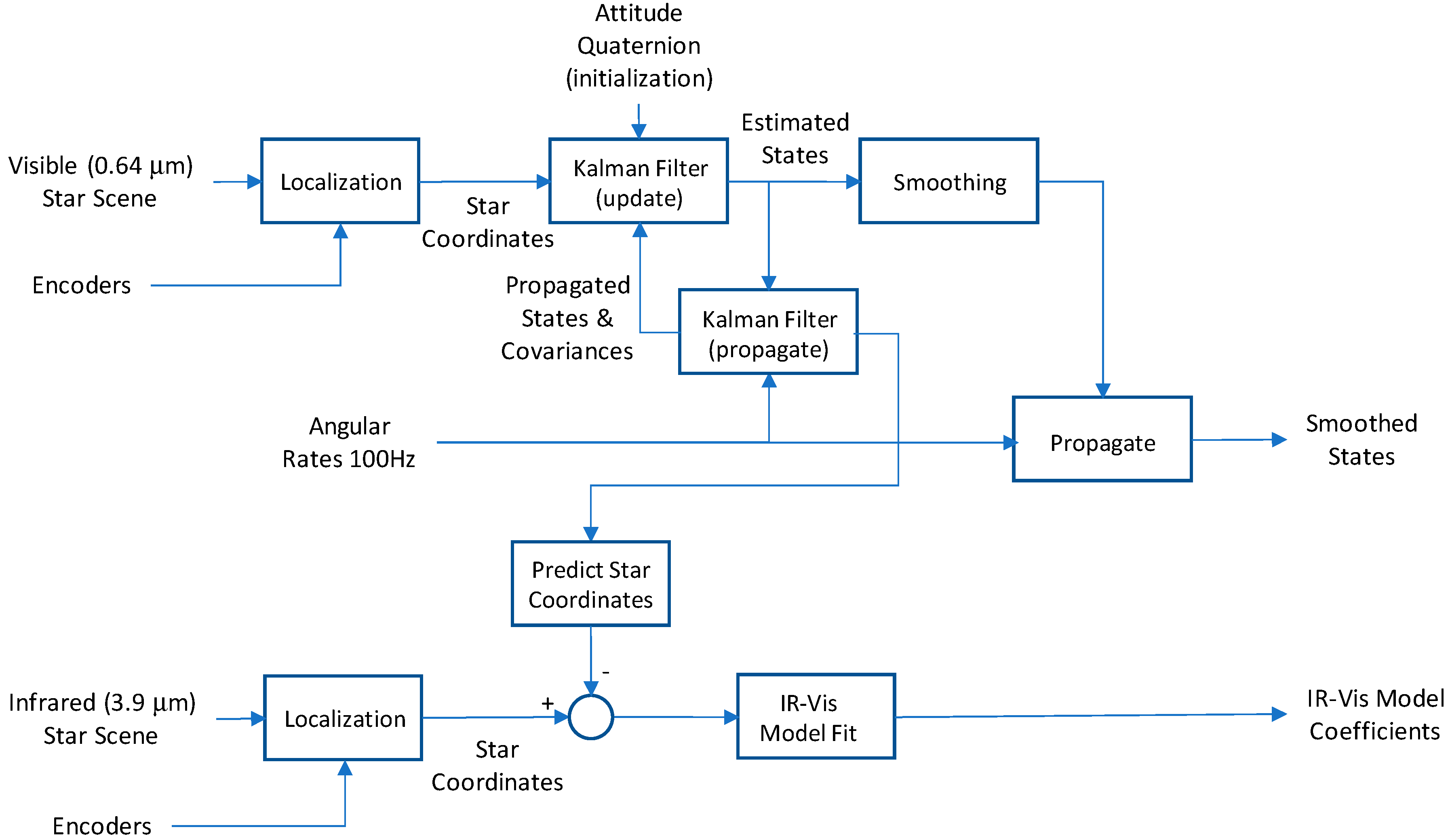
2.2. Observing Stars for Image Navigation and Registration
2.3. Observing the Onboard Calibration Targets
2.4. Observations of Space
2.5. Observations of the Moon
3. Ground System Processing
- Raw Data: Data in Consultative Committee for Space Data Systems (CCSDS) protocol transfer frames, as received from the satellite.
- Level 0 Data: Reconstructed unprocessed instrument data at full resolution; and all communications artifacts (e.g., synchronization frames, communications headers) removed.
- Level 1a Data: Level 0 data with all supplemental information appended for use in subsequent processing.
- Level 1alpha Data: Calibrated detector samples in radiance units in a swath but not navigated.
- Level 1beta Data: Calibrated detector samples in a swath, with detector rows aligned, navigated but not resampled.
- Level 1b Data: Calibrated and navigated detector data resampled into pixels in the fixed grid.
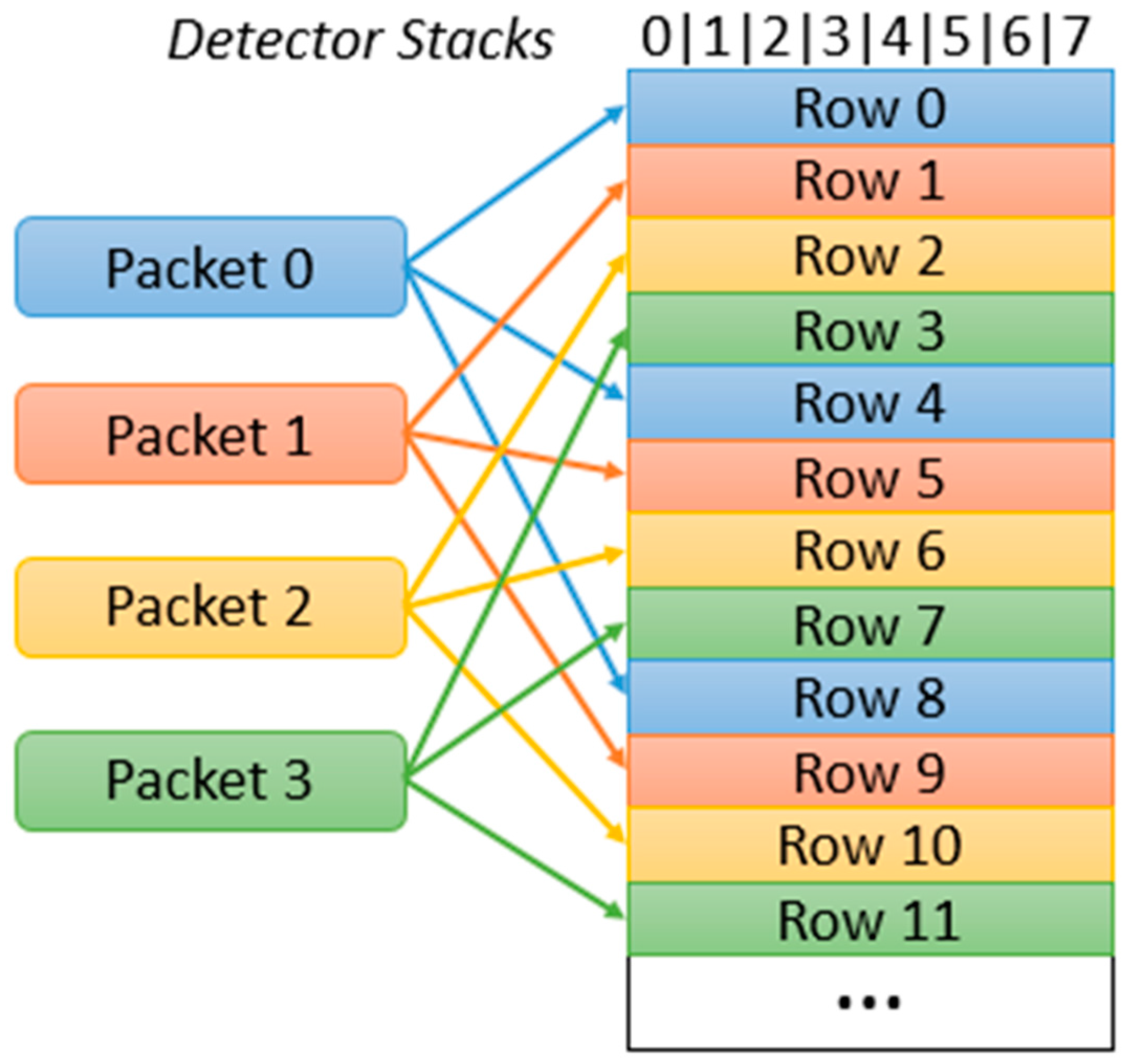
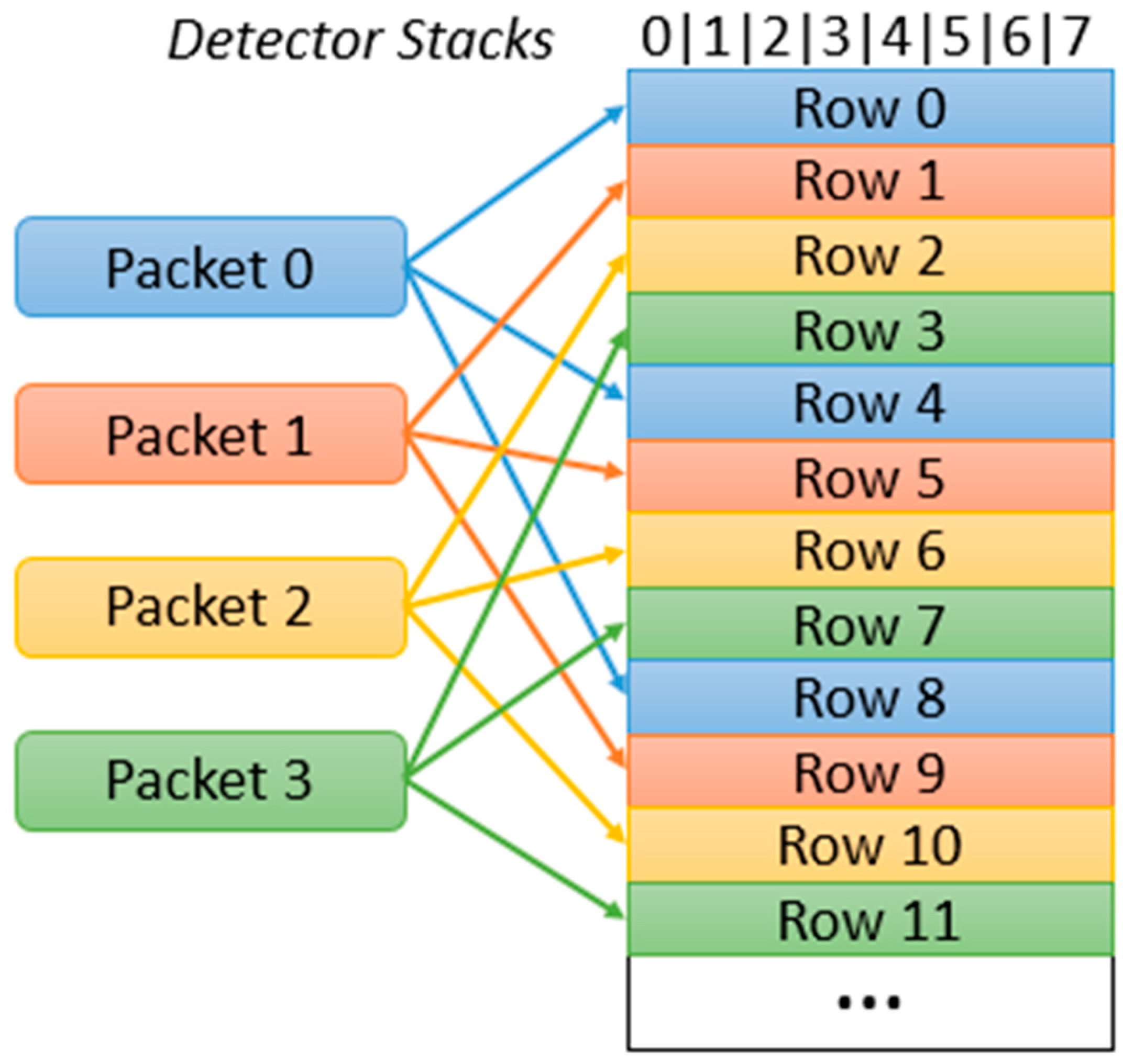
3.1. Level 0 Data Processing
3.2. Radiometric Calibration
3.2.1. Space Looks (Observations of Space)
3.2.2. Thermal Emissive Band Calibration
- is the channel averaged spectral radiance of the ICT;
- is the channel specific emissivity of the ICT; and
- and are North–South and East–West mirror reflectivities respectively at the time of ICT measurement.
- is the radiance of the sample;
- is the channel average effective radiance for the North–South scan mirror when the samples were collected;
- is the channel average effective radiance for the East–West scan mirror when the samples were collected;
- is the channel average effective radiance for the North–South scan mirror when the space looks were collected; and
- is the channel average effective radiance for the East–West scan mirror when the space looks were collected.
3.2.3. Reflective Solar Band Calibration
- is the average distance from the Sun to the Earth;
- is the actual distance between the Sun and the Earth at the time of the measurement;
- is the solar irradiance at 1 AU over a Lambertian surface with 100% albedo; and
- is the Sun-to-SCT diffuser normal angle of incidence.
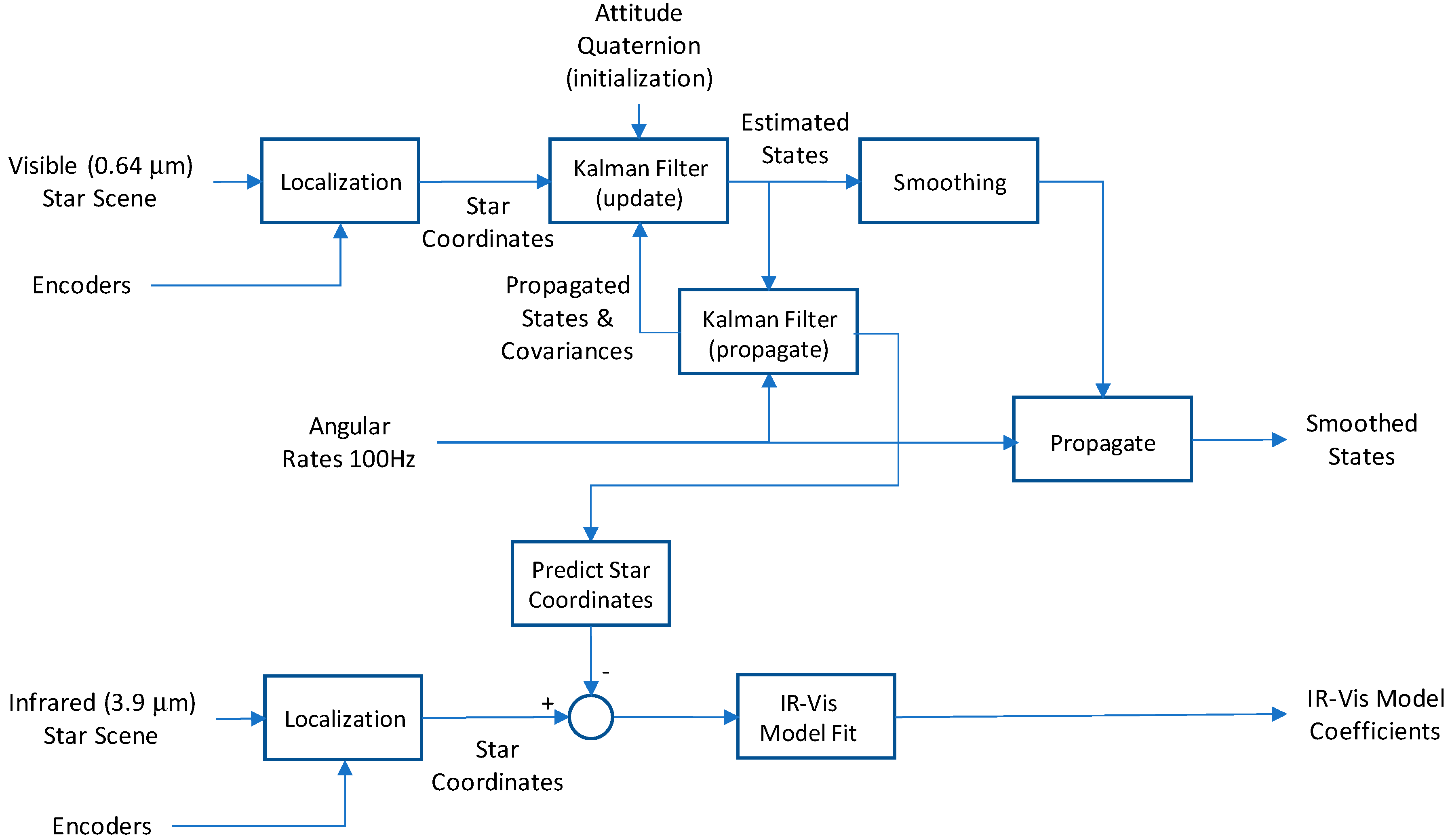
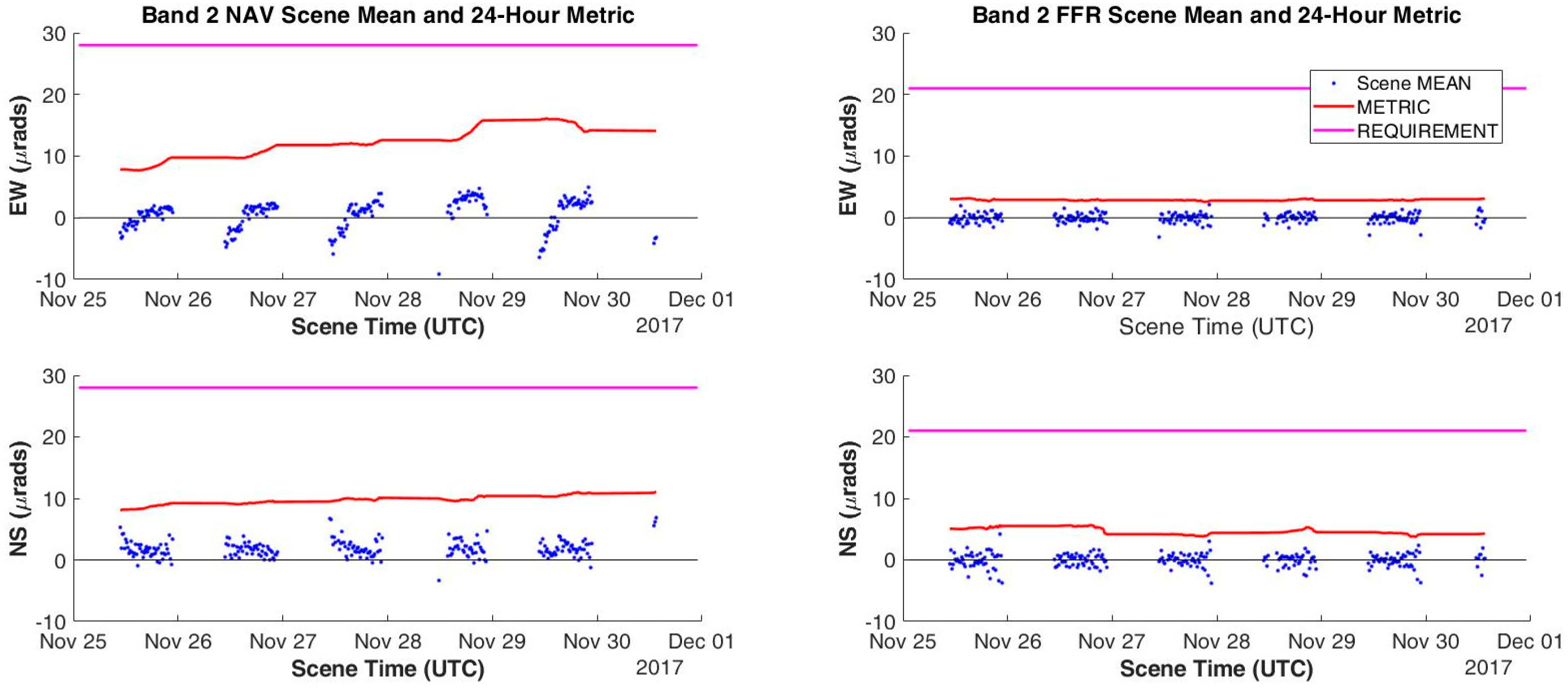
3.3. Image Navigation and Registration
- Quaternion: ~100 μrad uncertainty (sampled at 1 Hz)
- Attitude rate measurements: <20 μrad drift over 15 min (sampled at 100 Hz)
- Spacecraft position: 35 m in-track, 35 m cross-track and 70 m radial over 15 min (sampled at 1 Hz)
- Spacecraft velocity: <6 cm/s uncertainty per axis (sampled at 1 Hz).
4. Early Results from ABI
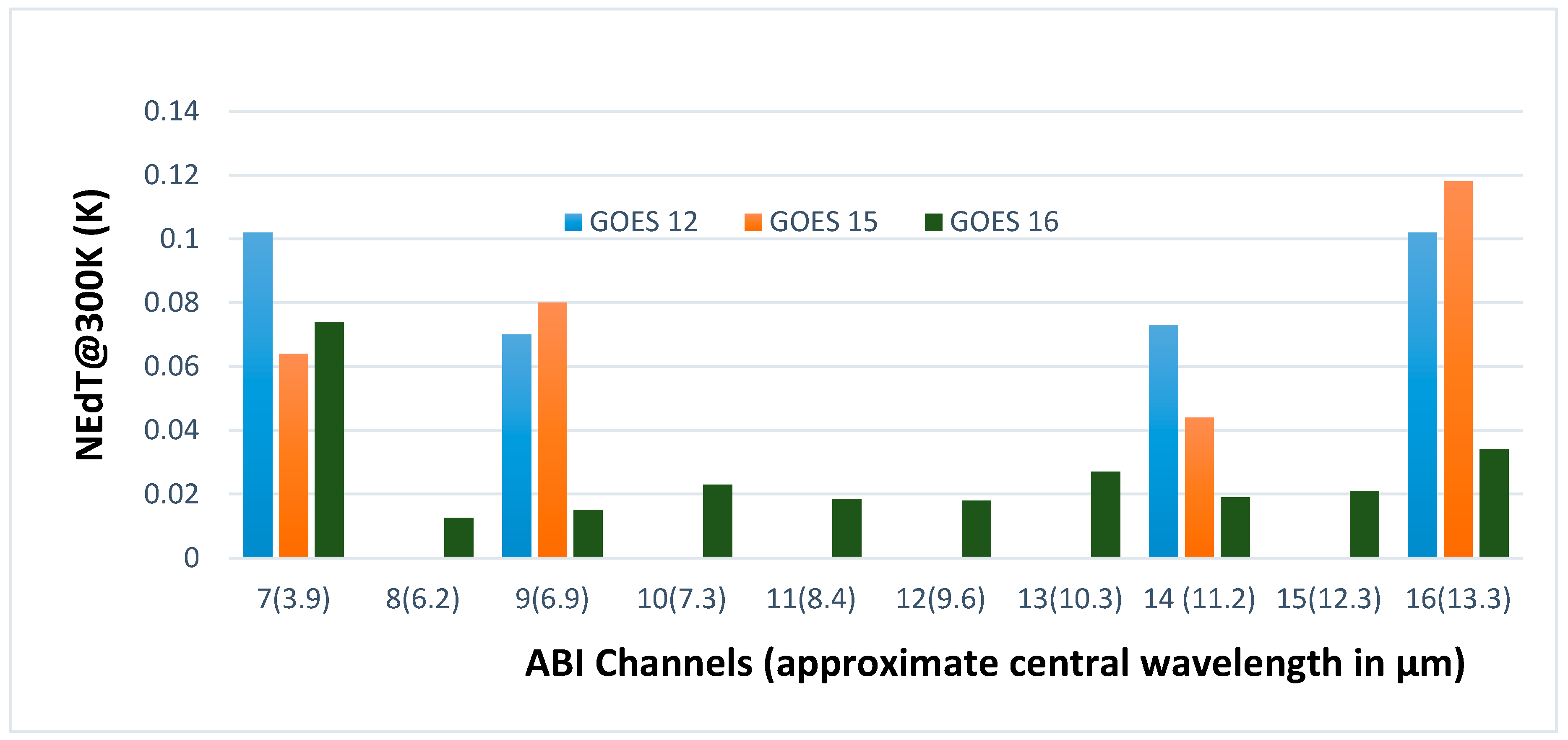
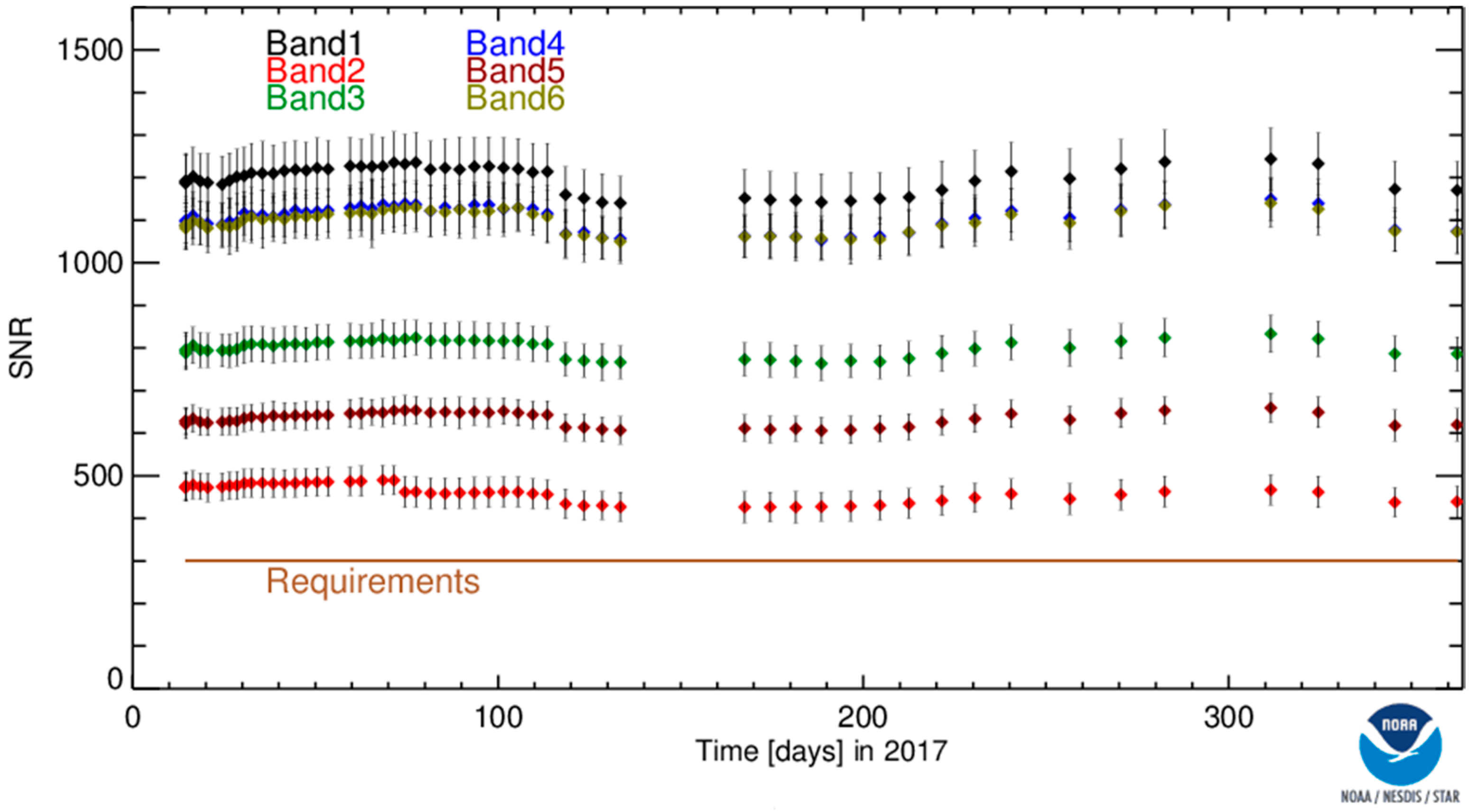
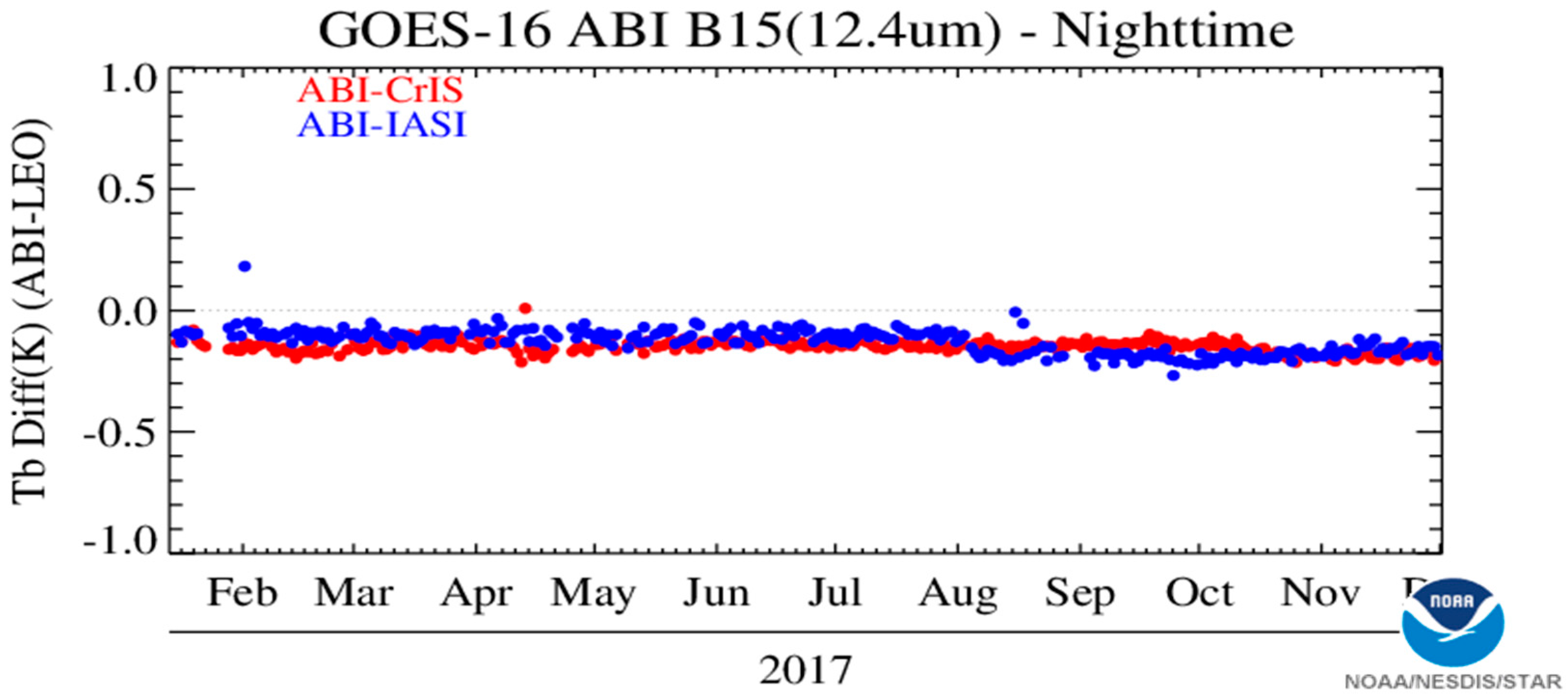
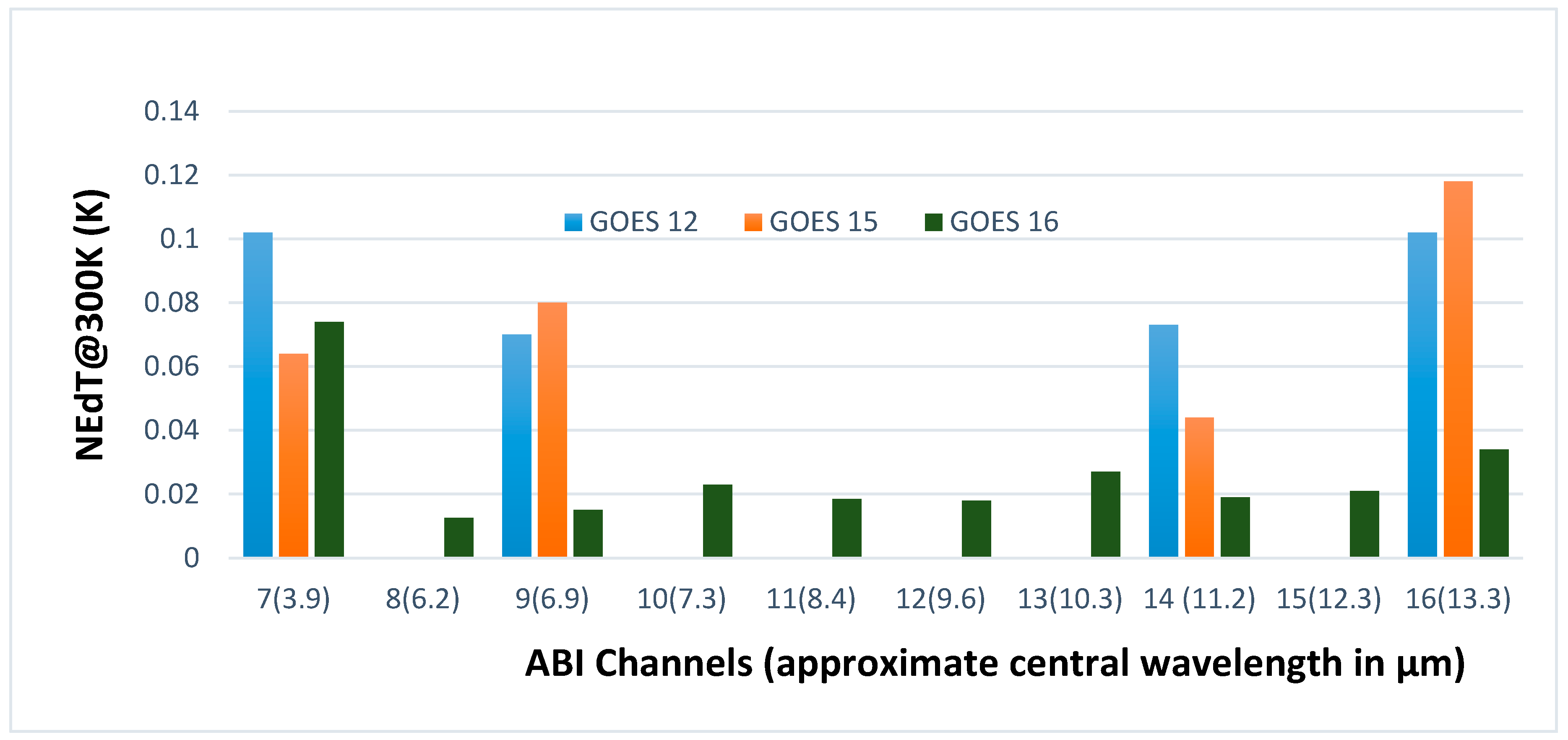
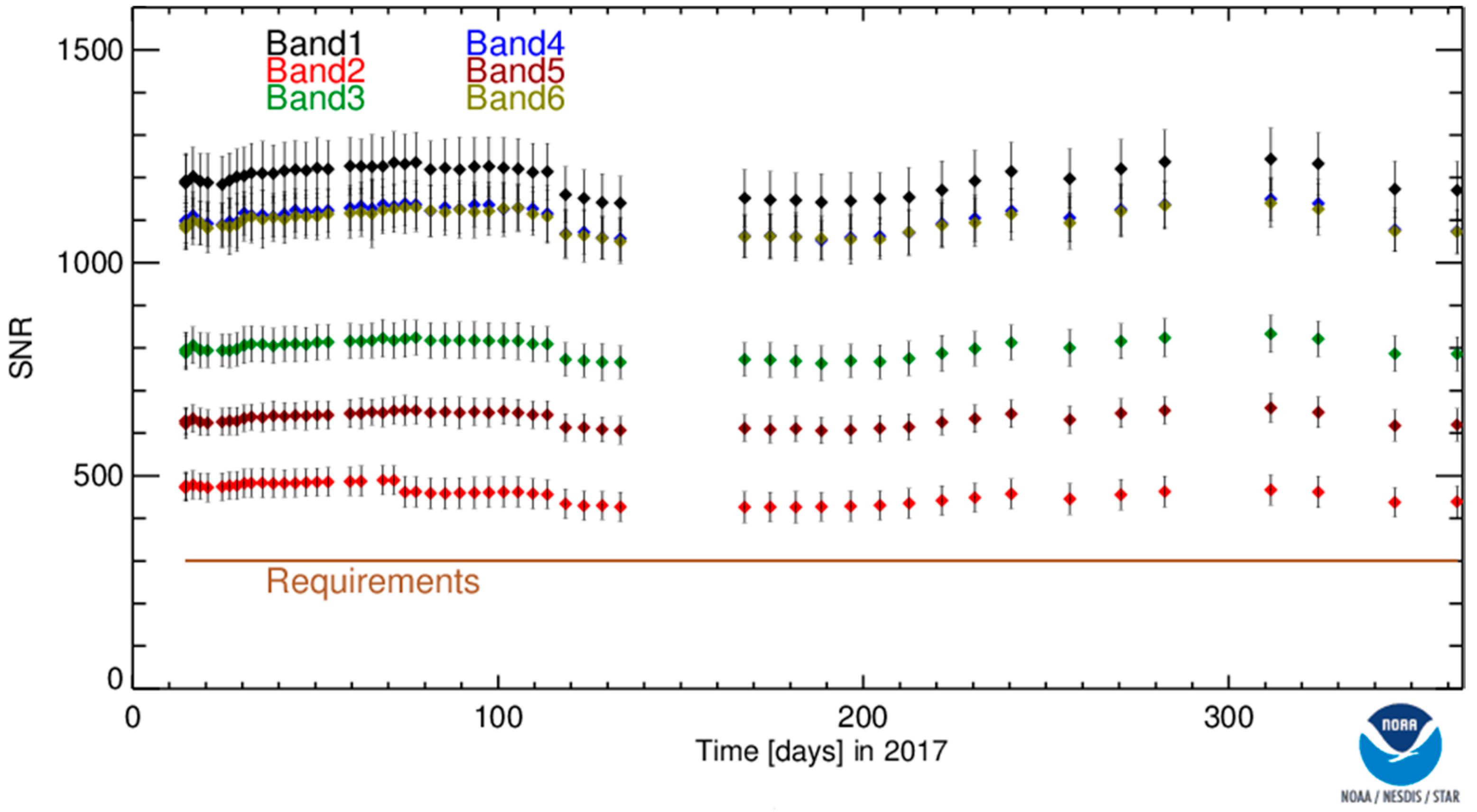
4.1. Radiometric Performance
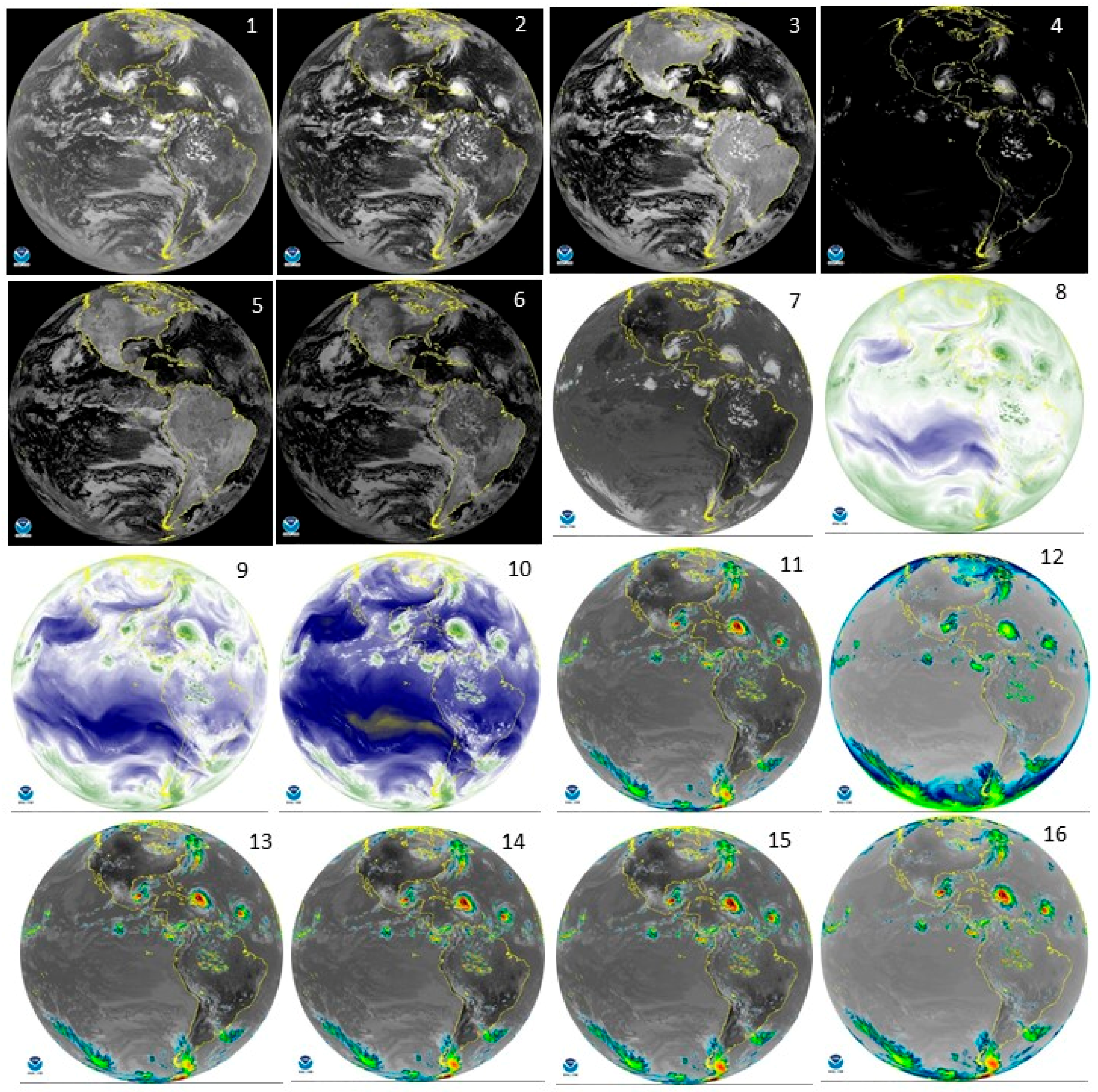
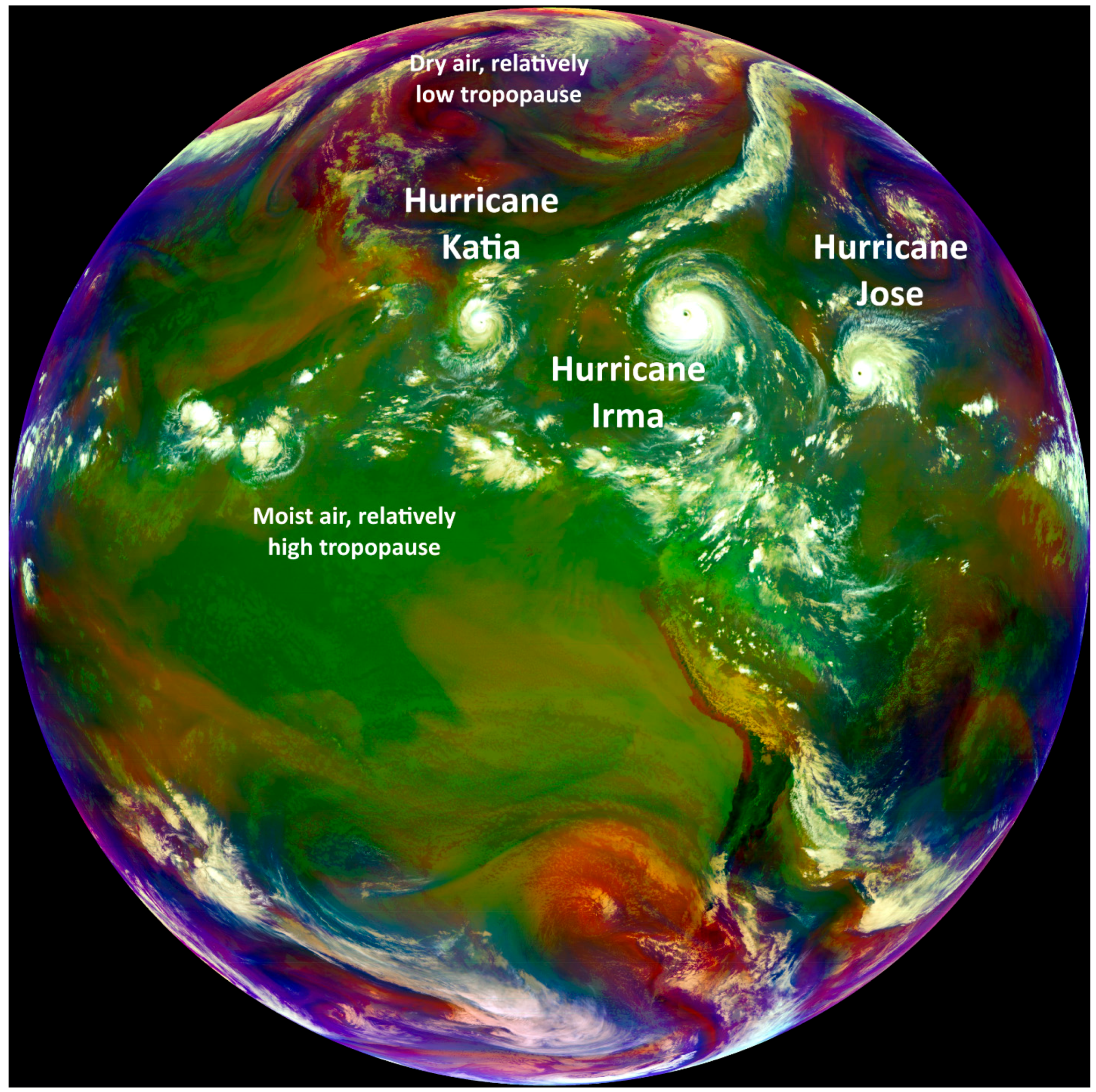
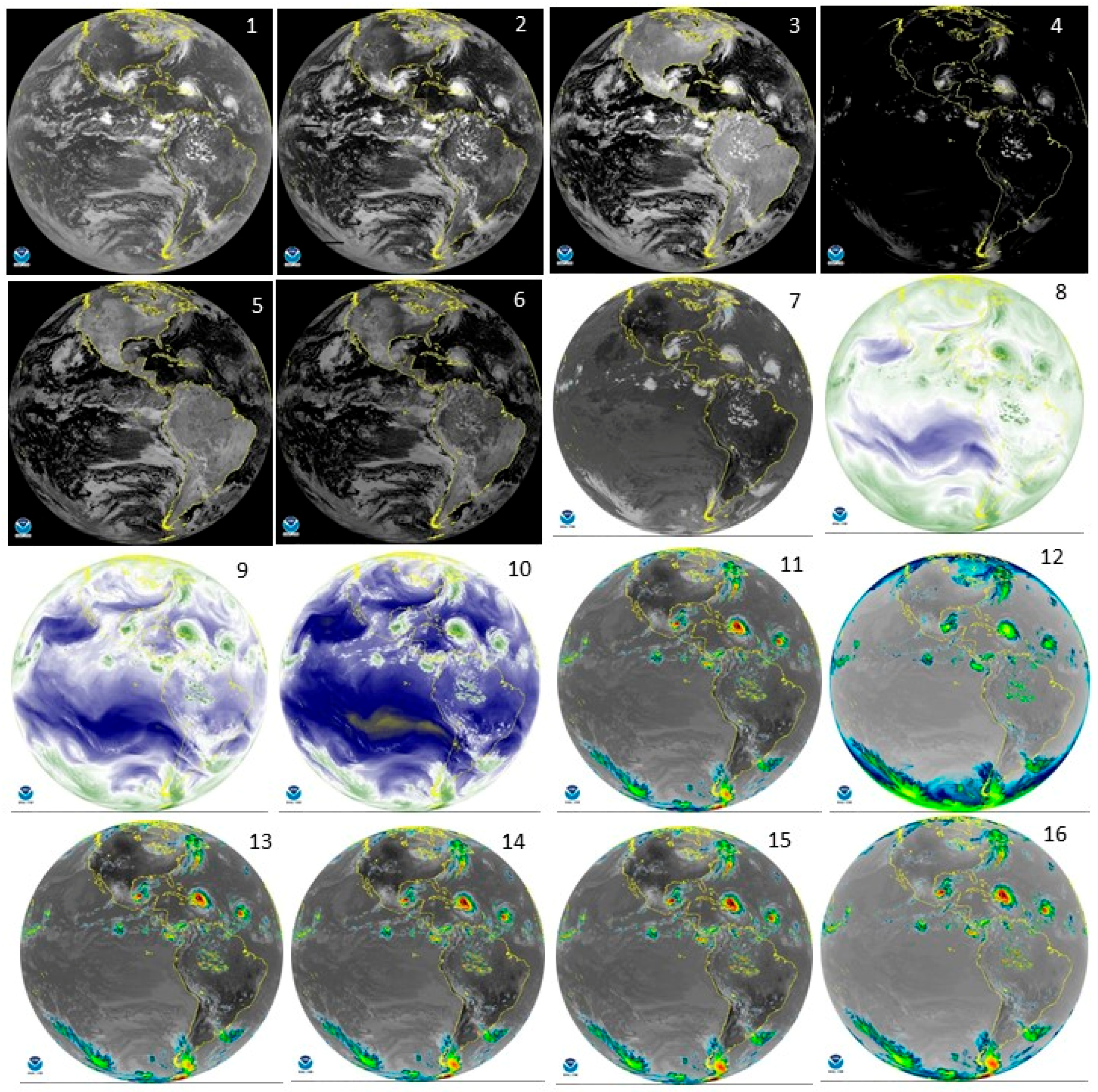
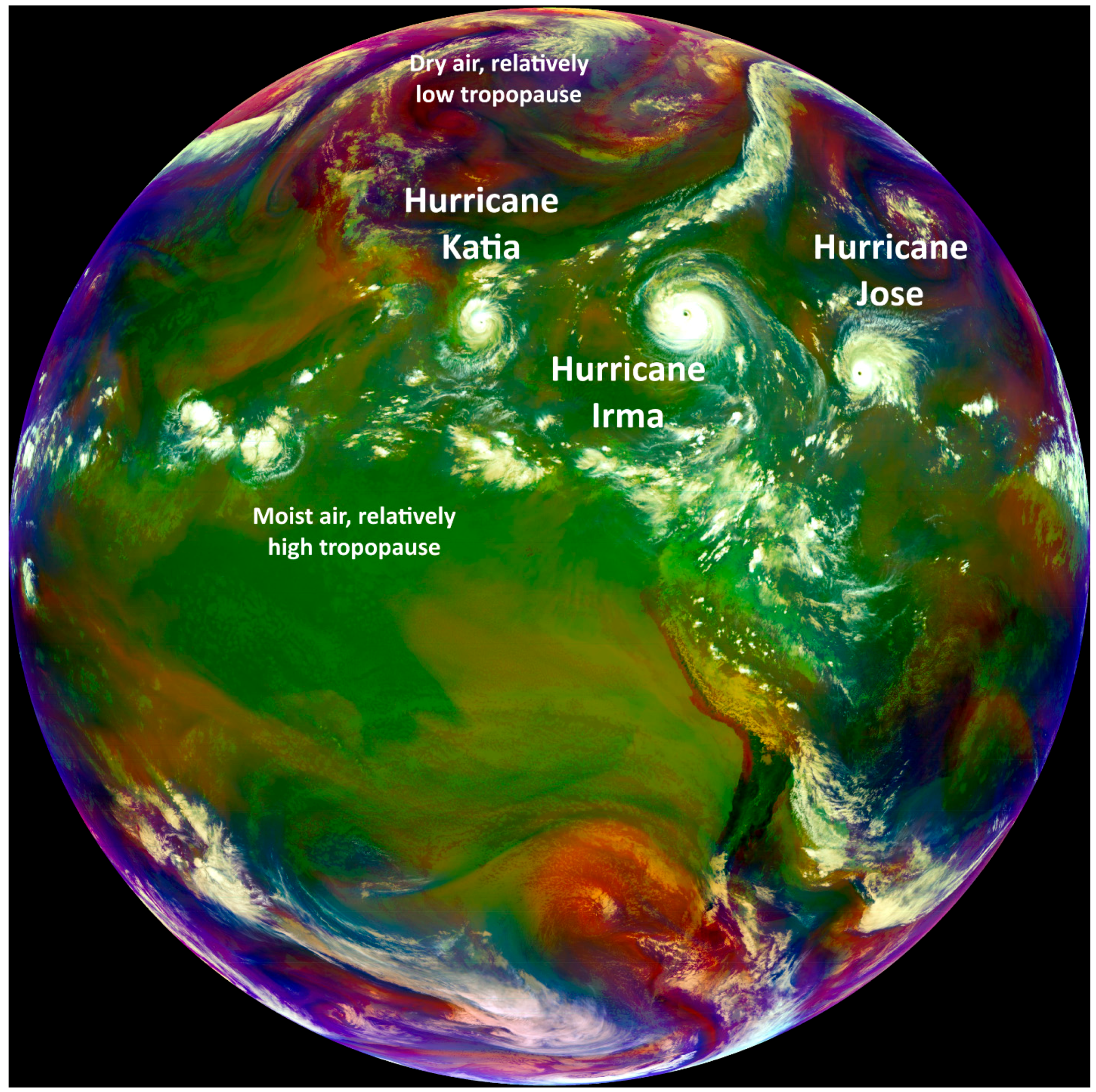
4.2. Improved Spectral Resolution
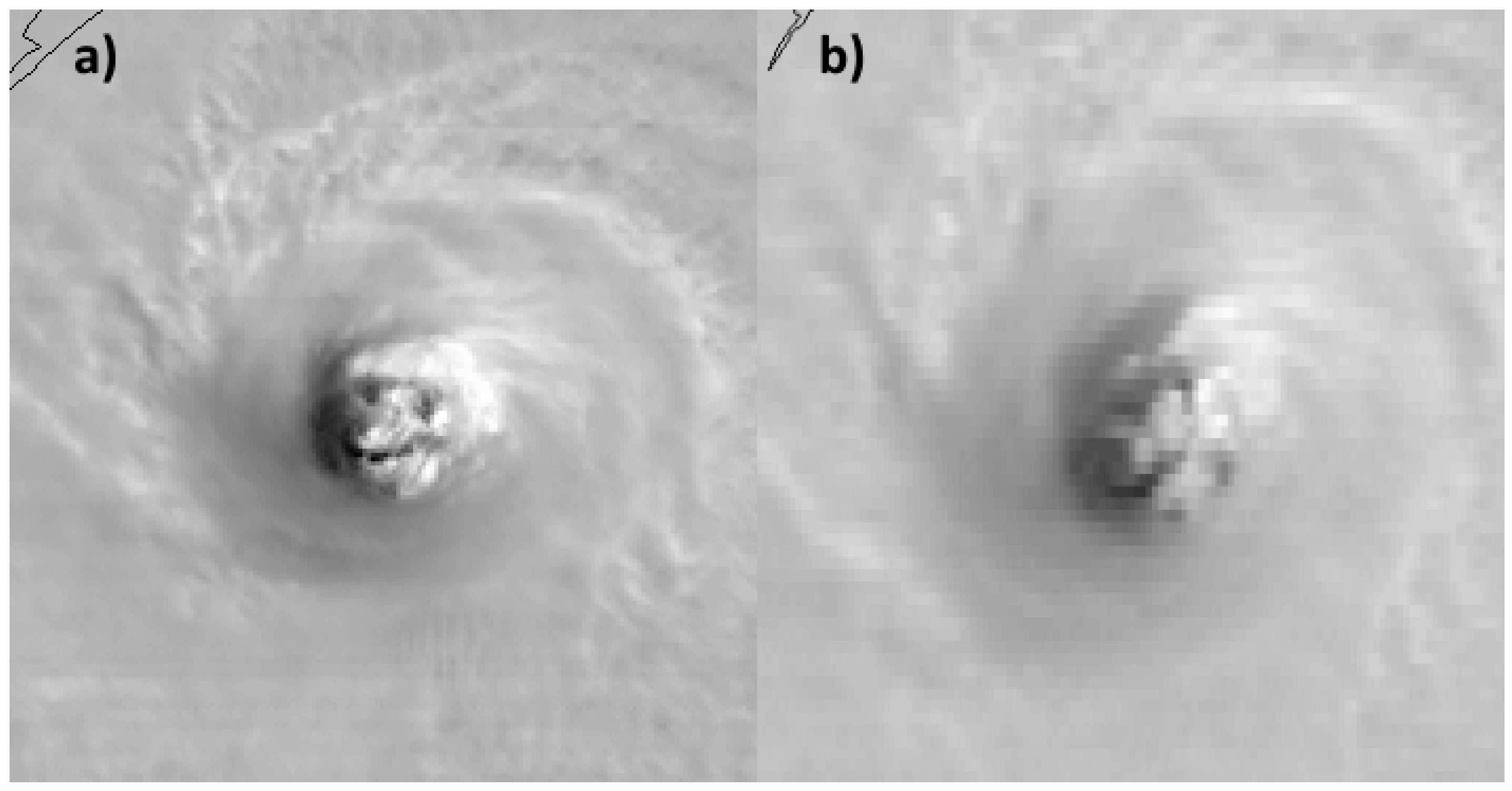
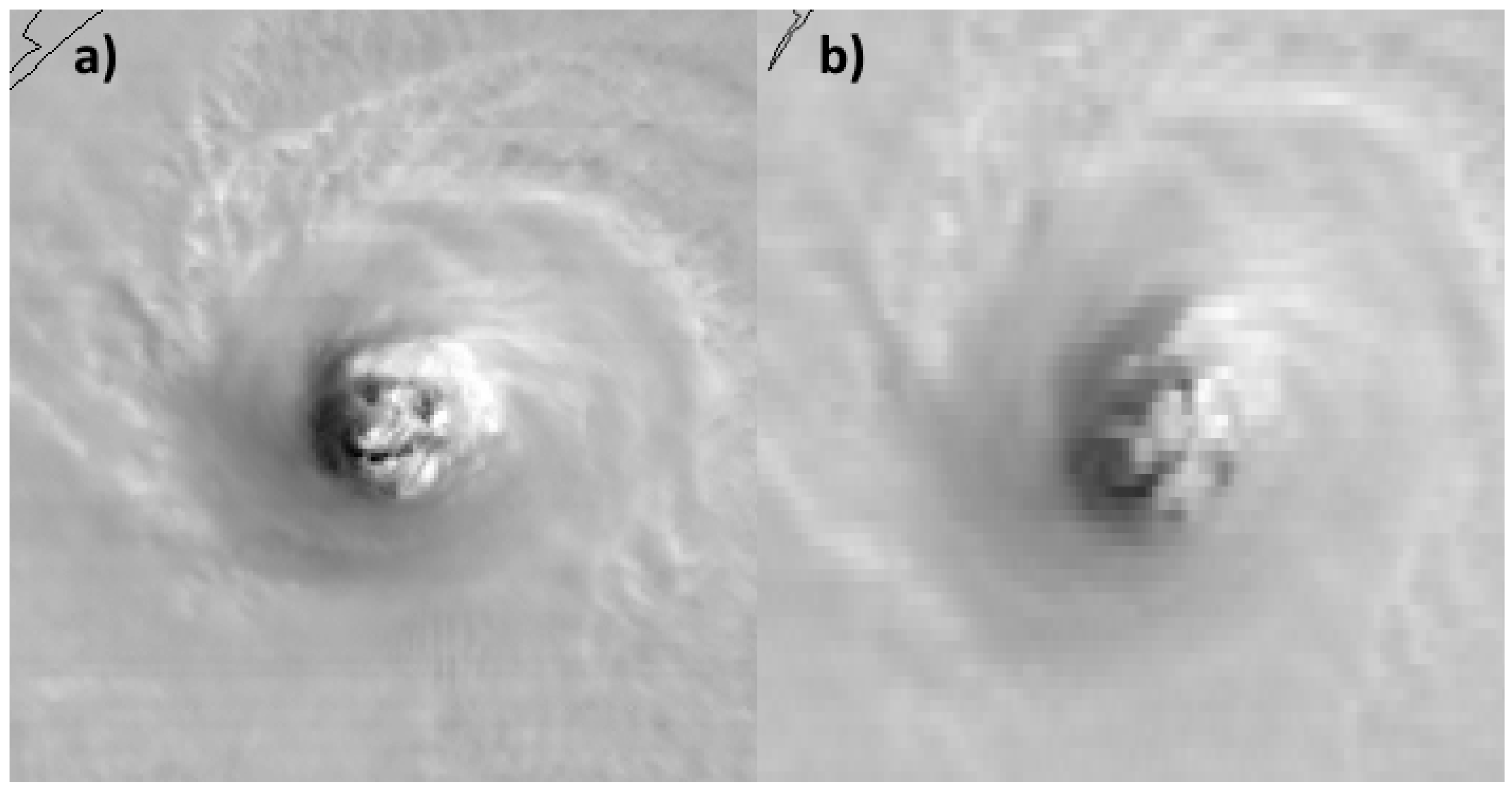
4.3. Improved Spatial Resolution
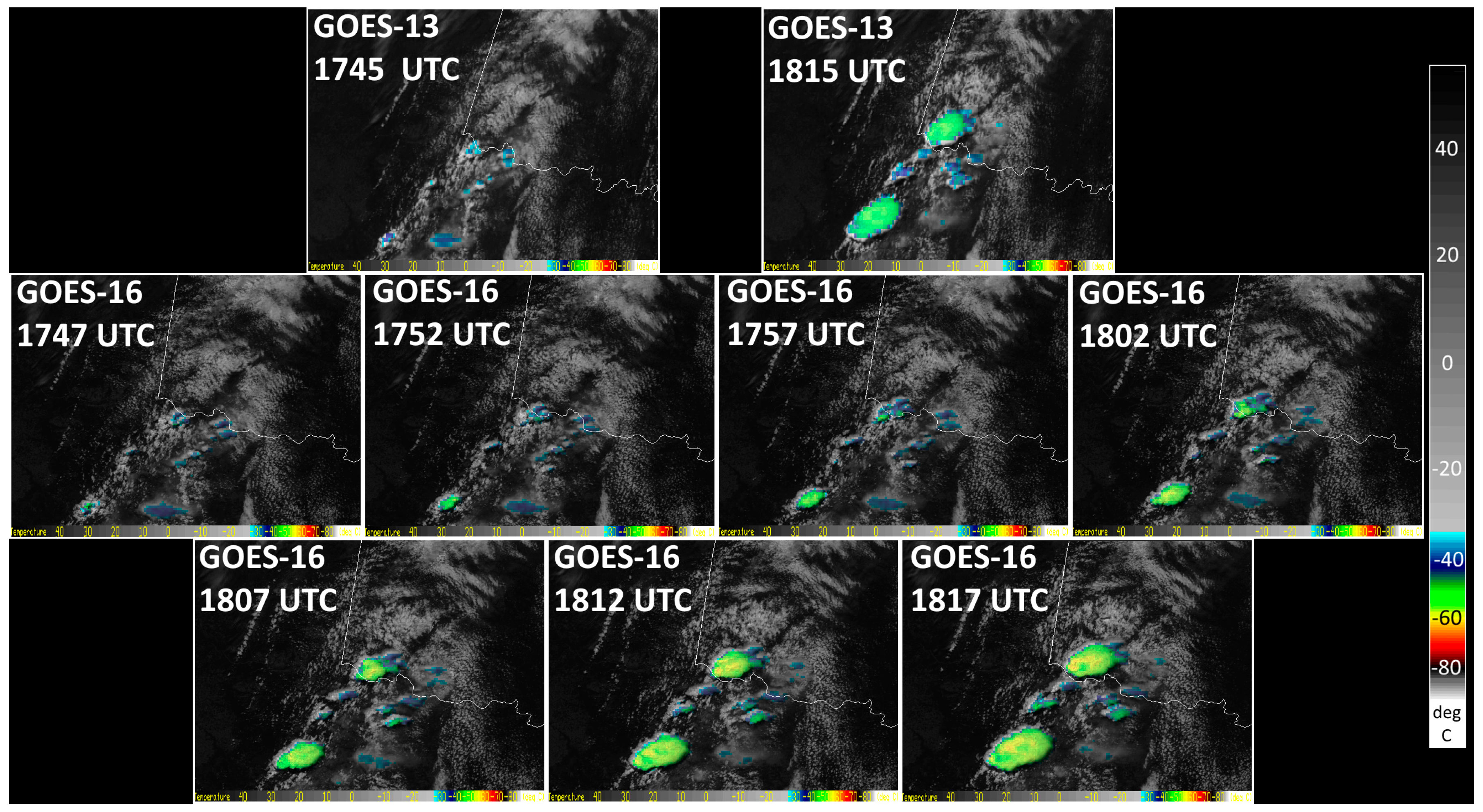
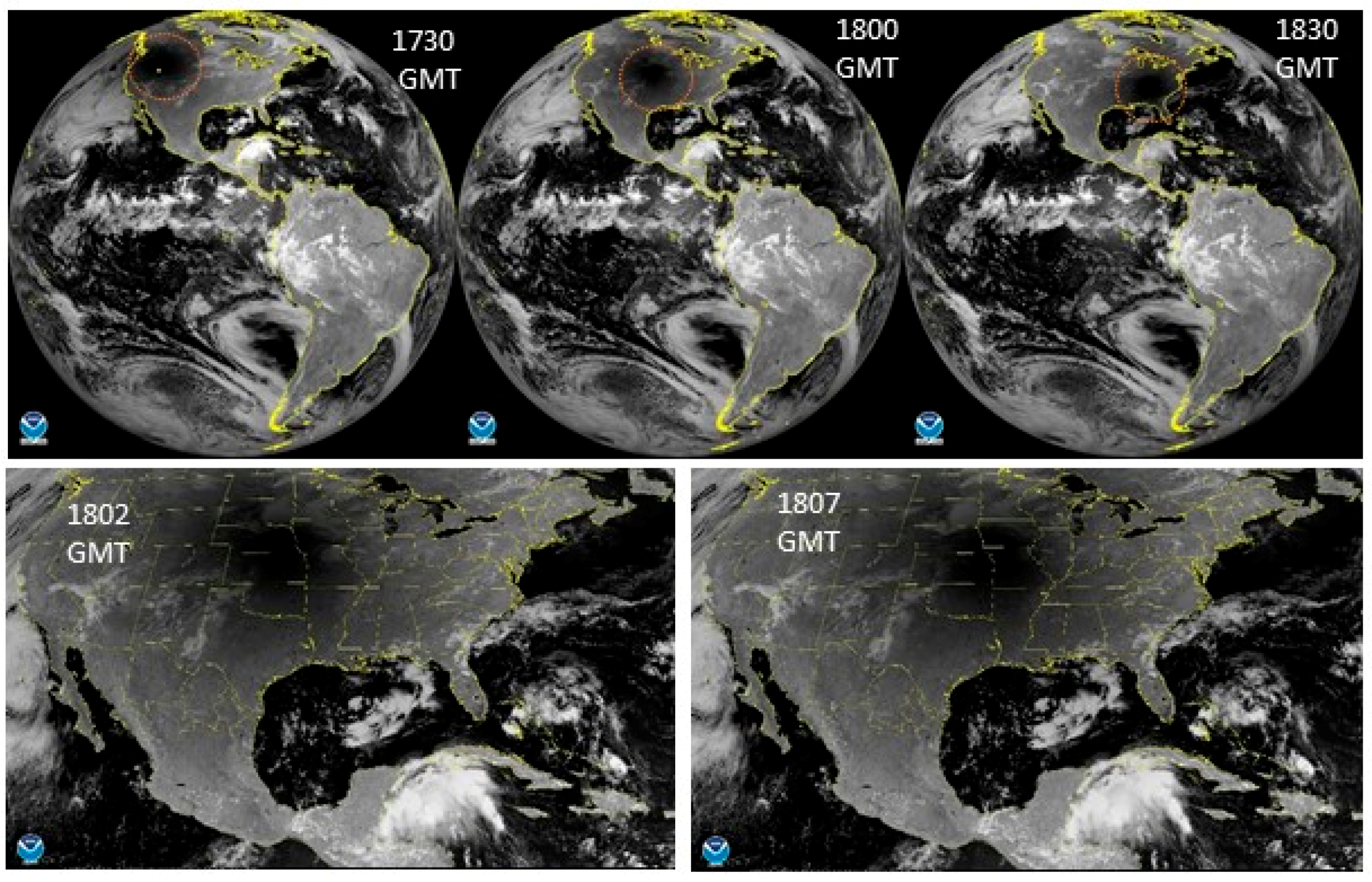
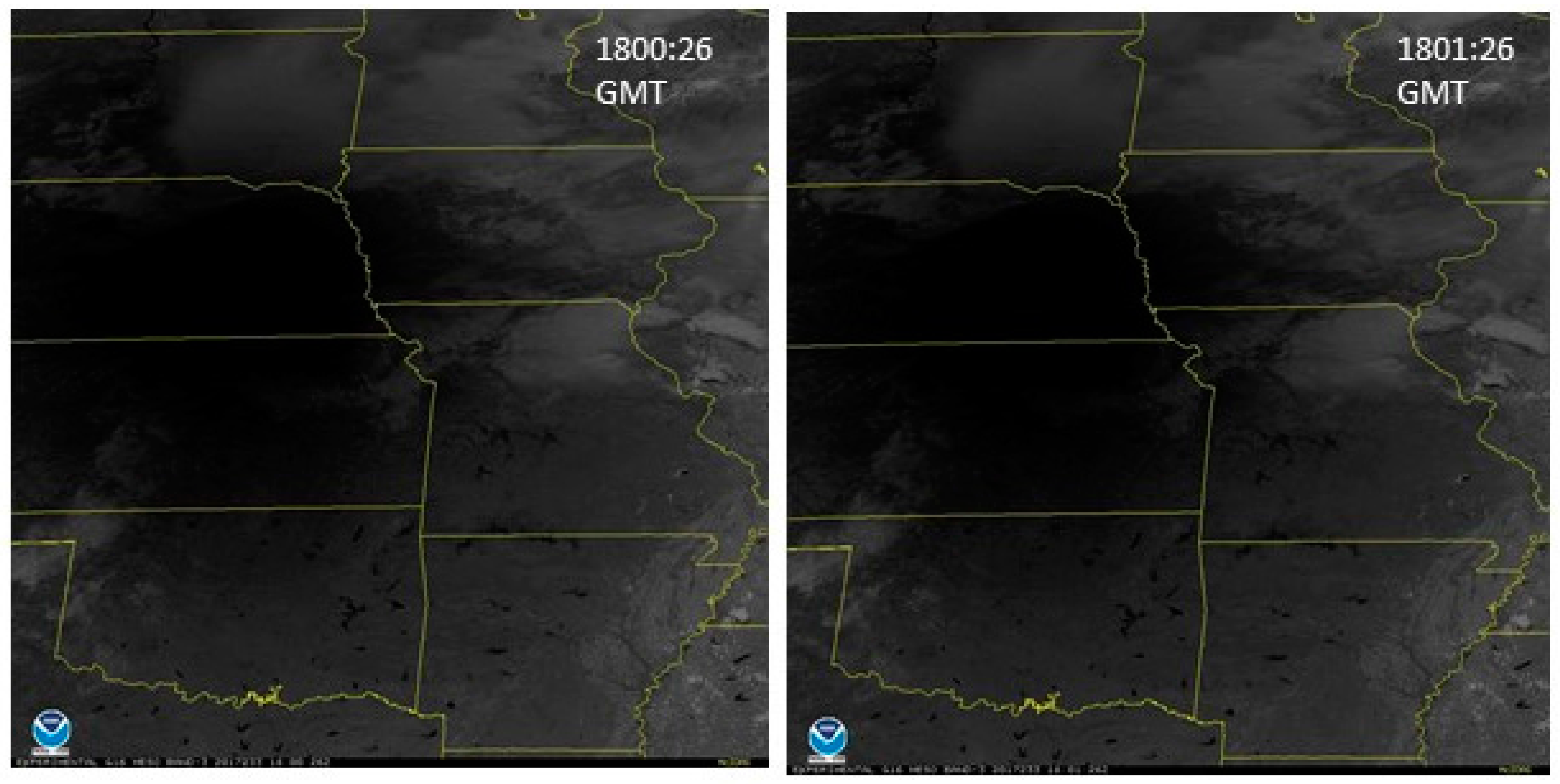
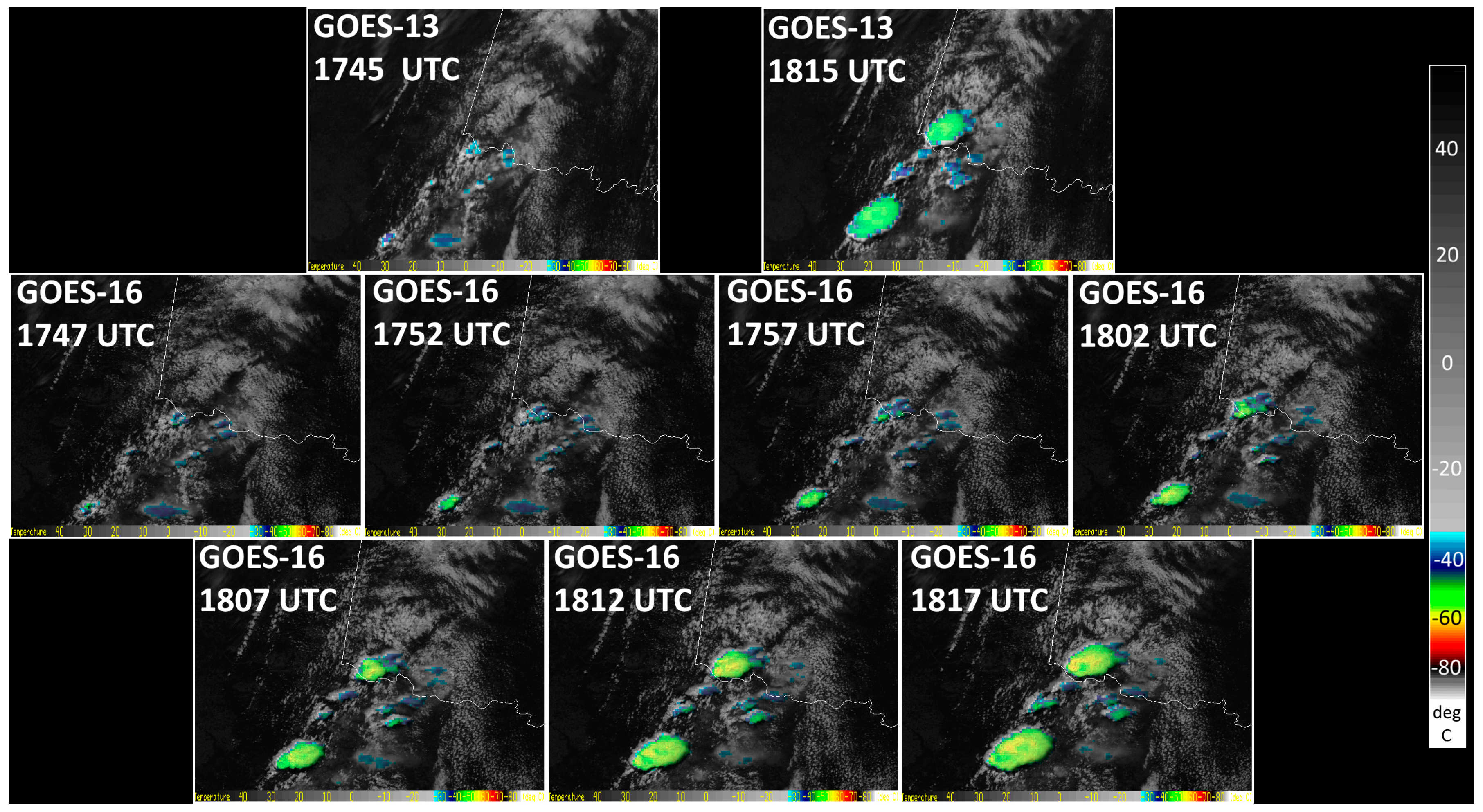
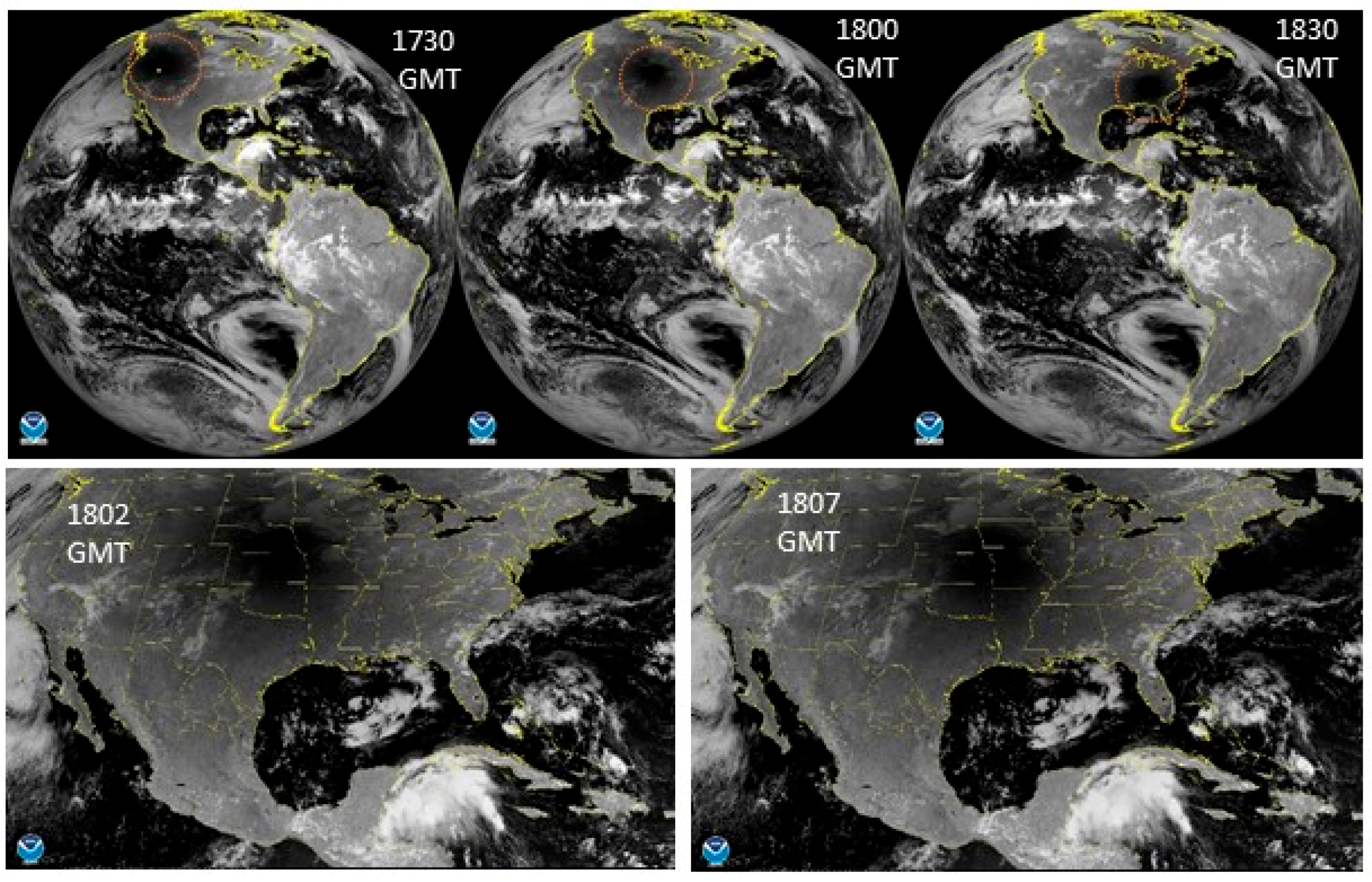
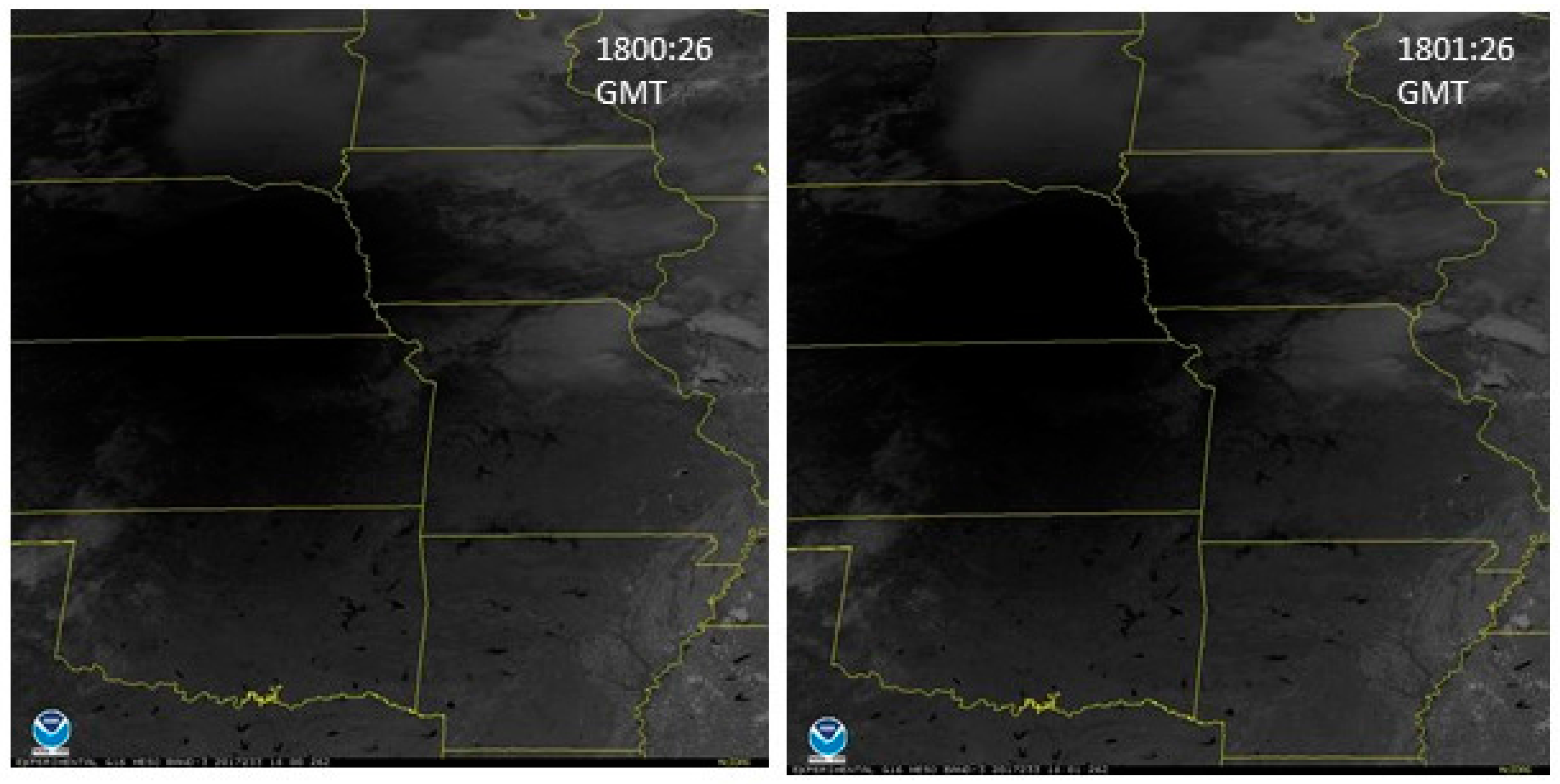
4.4. Improved Temporal Resolution
5. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kalluri, S.; Gundy, J.; Haman, B.; Paullin, A.; Van Rompay, P.; Vititoe, D.; Weiner, A.A. High Performance Remote Sensing Product Generation System Based on a Service Oriented Architecture for the Next Generation of Geostationary Operational Environmental Satellites. Remote Sens. 2015, 7, 10385–10399. [Google Scholar] [CrossRef]
- Schmit, T.J.; Gunshor, M.M.; Menzel, W.P.; Gurka, J.J.; Li, J.; Bachmeier, A.S. Introducing the next generation Advanced Baseline Imager on GOES-R. Bull. Am. Meteorol. Soc. 2005, 86, 1079–1096. [Google Scholar] [CrossRef]
- Schmit, T.J.; Griffith, P.; Gunshor, M.M.; Daniels, J.M.; Goodman, S.J.; Lebair, W.J. A Closer Look at the ABI on the GOES-R Series. Bull. Am. Meteorol. Soc. 2017, 98, 681–698. [Google Scholar] [CrossRef]
- Kieffer, H.H.; Stone, T.C. The spectral irradiance of the Moon. Astron. J. 2005, 129, 2887–2901. [Google Scholar] [CrossRef]
- Goldberg, M.; Ohring, G.; Butler, J.; Cao, C.; Datla, R.; Doelling, D.; Gärtner, V.; Hewison, T.; Iacovazzi, B.; Kim, D.; et al. The Global Space-Based Inter-Calibration System. Bull. Am. Meteorol. Soc. 2011, 92, 467–475. [Google Scholar] [CrossRef]
- Consultative Committee for Space Data Systems (CCSDS) Blue Books: Recommended Standards. Available online: http://ccsds.cosmos.ru/publications/BlueBooks.aspx (accessed on 25 January 2018).
- Datla, R.; Shao, X.; Cao, C.; Wu, X. Comparison of the Calibration Algorithms and SI Traceability of MODIS, VIIRS, GOES, and GOES-R ABI Sensors. Remote Sens. 2016, 8, 126. [Google Scholar] [CrossRef]
- Griffith, P.C. 11.2 ABI’s Unique Calibration and Validation Capabilities. In Proceedings of the 12th Annual Symposium on New Generation Operational Environmental Satellite Systems, AMS Annual Meeting, New Orleans, LA, USA, 11–14 January 2016. [Google Scholar]
- Okuyama, A.; Andou, A.; Date, K.; Hoasaka, K.; Mori, N.; Murata, H.; Tabata, T.; Takahashi, M.; Yoshino, R.; Bessho, K. Preliminary validation of Himawari-8/AHI navigation and calibration. Proc. SPIE 2015, 9607, 96072E. [Google Scholar]
- GOES-R Product Definition and Users’ Guide (PUG) Volume 3 (L1b Products), Revision F. 2017. Available online: http://www.goes-r.gov/users/docs/PUG-L1b-vol3.pdf (accessed on 25 January 2018).
- Gibbs, B.P.; Carr, J.L. GOES-R Orbit and Instrument Attitude Determination. In Proceedings of the 24th International Symposium on Space Flight Dynamics, Columbia, MD, USA, 5–9 May 2014. [Google Scholar]
- GOES-R General Interface Requirements Document (GIRD) 417-R-GIRD-0009, Version 2.24, NASA GSFC. 2004. Available online: http://www.goes-r.gov/syseng/docs/GIRD_V_2_24.pdf (accessed on 25 January 2018).
- Igli, D.; Virgilio, V.; Grounder, K. Image navigation and registration for GOES-R advanced baseline imager. In Proceedings of the 2009 AAS Guidance and Control Conference, Breckenridge, CO, USA, 30 January–4 February 2009. [Google Scholar]
- Chapel, J.; Stancliffe, D.; Bevacqua, T.; Winkler, S.; Clapp, B.; Rood, T.; Gaylor, D.; Freesland, D.; Krimchansky, A. Guidance, navigation, and control performance for the GOES-R spacecraft. CEAS Space J. 2015, 7, 87–104. [Google Scholar] [CrossRef]
- Shuttle Radar Topography Mission. Available online: https://www2.jpl.nasa.gov/srtm/ (accessed on 25 January 2018).
- Yu, F.; Wu, X.; Shao, X.; Efremova, B.V.; Yoo, H.; Qian, H.; Iacovazzi, R.A. Early radiometric calibration performances of GOES-16 Advanced Baseline Imager (ABI). Proc. SPIE 2017, 10402, 104020S. [Google Scholar]
- Santurette, E.P.; Georgiev, C.G. Weather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity Analysis; Elsevier: Amsterdam, The Netherlands; Academic Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Tjemkes, S.; Duff, C.; Elliott, S. Total Ozone from Meteosat Second Generation. In Proceedings of the Meteorological Satellite Data Users’ Conference, Weimar, Germany, 29 September–3 October 2003; pp. 306–311. [Google Scholar]
- Rosting, B.; Sunde, J. Application of Meteosat WV images in monitoring of synoptic scale cyclogenesis. In Proceedings of the Meteorological Satellite Data Users’ Conference, Vienna, Austria, 16–20 September 1996; pp. 119–126. [Google Scholar]
- Bader, M.J.; Grant, J.R.; Waters, A.J.; Forbes, G.J. Images in Weather Forecasting: A Practical Guide for Interpreting Satellite and Radar Imagery; Cambridge University Press: New York, NY, USA, 1995. [Google Scholar]
- Line, W.E.; Schmit, T.J.; Lindsey, D.T.; Goodman, S.J. Use of Geostationary Super Rapid Scan Satellite Imagery by the Storm Prediction Center. Weather Forecast. 2016, 31, 483–494. [Google Scholar] [CrossRef]
- Schmit, T.J.; Goodman, S.J.; Lindsey, D.T.; Rabin, R.M.; Bedka, K.M.; Gunshor, M.M.; Cintineo, J.L.; Velden, C.S.; Bachmeier, A.S.; Lindstrom, S.S.; et al. Geostationary Operational Environmental Satellite (GOES)-14 super rapid scan operations to prepare for GOES-R. J. Appl. Remote Sens. 2013, 7, 073462. [Google Scholar] [CrossRef]
- Setvak, M.; Lindsey, D.T.; Novak, P.; Wang, P.K.; Radova, M.; Kerkmann, J.; Grasso, L.; Su, S.; Rabin, R.M.; Stastka, J.; et al. Satellite-observed cold-ring-shaped features atop deep convective clouds. Atmos. Res. 2010, 97, 80–96. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ABI Band # | Center Wavelength (µm) | Nadir Spatial Resolution (km) | East–West ASD (μrad) | Nominal IFOV (µrad) | Nominal IFOV (km) | Detector Rows | Detector Columns | Bits Downlinked | ||
|---|---|---|---|---|---|---|---|---|---|---|
| North–South | East–West | North–South | East–West | |||||||
| 1 | 0.47 | 1 | 22 | 22.9 | 22.9 | 0.82 | 0.82 | 676 | 3 | 11 |
| 2 | 0.64 | 0.5 | 11 | 10.5 | 12.4 | 0.38 | 0.44 | 1460 | 3 | 12 |
| 3 | 0.86 | 1 | 22 | 22.9 | 22.9 | 0.82 | 0.82 | 676 | 3 | 11 |
| 4 | 1.38 | 2 | 44 | 42 | 51.5 | 1.50 | 1.84 | 372 | 6 | 12 |
| 5 | 1.61 | 1 | 22 | 22.9 | 22.9 | 0.82 | 0.82 | 676 | 6 | 13 |
| 6 | 2.25 | 2 | 44 | 42 | 51.5 | 1.50 | 1.84 | 372 | 6 | 11 |
| 7 | 3.9 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 14 |
| 8 | 6.18 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 12 |
| 9 | 6.95 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 13 |
| 10 | 7.34 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 13 |
| 11 | 8.5 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 13 |
| 12 | 9.61 | 2 | 44 | 47.7 | 51.5 | 1.70 | 1.84 | 332 | 6 | 13 |
| 13 | 10.35 | 2 | 44 | 38.1 | 34.3 | 1.36 | 1.23 | 408 | 6 | 13 |
| 14 | 11.2 | 2 | 44 | 38.1 | 34.3 | 1.36 | 1.23 | 408 | 6 | 13 |
| 15 | 12.3 | 2 | 44 | 38.1 | 34.3 | 1.36 | 1.23 | 408 | 6 | 13 |
| 16 | 13.3 | 2 | 44 | 38.1 | 34.3 | 1.36 | 1.23 | 408 | 6 | 12 |
| Swath | Duration (s) | Frames per Swath | ||
|---|---|---|---|---|
| 0.5-km | 1-km | 2-km | ||
| Full Disk: Swath 0 | 6.750 | 15,008 | 7504 | 3752 |
| Full Disk: Swath 1 | 8.710 | 19,360 | 9680 | 4840 |
| Full Disk: Swath 2 | 10.104 | 22,464 | 11,232 | 5616 |
| Full Disk: Swath 3 | 11.172 | 24,832 | 12,416 | 6208 |
| Full Disk: Swath 4 | 12.011 | 26,688 | 13,344 | 6672 |
| Full Disk: Swath 5 | 12.672 | 28,160 | 14,080 | 7040 |
| Full Disk: Swath 6 | 13.185 | 29,312 | 14,656 | 7328 |
| Full Disk: Swath 7 | 13.568 | 30,144 | 15,072 | 7536 |
| Full Disk: Swath 8 | 13.834 | 30,752 | 15,376 | 7688 |
| Full Disk: Swath 9 | 13.991 | 31,104 | 15,552 | 7776 |
| Full Disk: Swath 10 | 14.041 | 31,200 | 15,600 | 7800 |
| Full Disk: Swath 11 | 14.041 | 31,200 | 15,600 | 7800 |
| Full Disk: Swath 12 | 13.991 | 31,104 | 15,552 | 7776 |
| Full Disk: Swath 13 | 13.834 | 30,752 | 15,376 | 7688 |
| Full Disk: Swath 14 | 13.568 | 30,144 | 15,072 | 7536 |
| Full Disk: Swath 15 | 13.185 | 29,312 | 14,656 | 7328 |
| Full Disk: Swath 16 | 12.672 | 28,160 | 14,080 | 7040 |
| Full Disk: Swath 17 | 12.011 | 26,688 | 13,344 | 6672 |
| Full Disk: Swath 18 | 11.172 | 24,832 | 12,416 | 6208 |
| Full Disk: Swath 19 | 10.104 | 22,464 | 11,232 | 5616 |
| Full Disk: Swath 20 | 8.710 | 19,360 | 9680 | 4840 |
| Full Disk: Swath 21 | 6.750 | 15,008 | 7504 | 3752 |
| CONUS: All swaths | 7.114 | 15,808 | 7904 | 3952 |
| Mesoscale: All swaths | 2.530 | 5632 | 2816 | 1408 |
| Band (μm) | 100% Albedo Radiance (mW/m2/sr/cm−1) |
|---|---|
| 0.47 | 14.4 |
| 0.64 | 21.1 |
| 0.86 | 22.8 |
| 1.38 | 21.7 |
| 1.61 | 20.0 |
| 2.25 | 12.1 |
| Navigation Errors of ABI Principal Bands (CWG Evaluation) | ||||||
|---|---|---|---|---|---|---|
| Band (µm) | Required (µrad) | Expected (µrad) | Measured (µrad) | |||
| EW | NS | EW | NS | EW | NS | |
| 0.64 | 28.0 | 28.0 | 10.4 | 10.1 | 3.0 | 1.2 |
| 0.86 | 28.0 | 28.0 | 10.5 | 10.3 | 6.0 | 5.0 |
| 2.25 | 28.0 | 28.0 | 10.6 | 10.4 | 13.1 | 10.4 |
| 3.90 | 28.0 | 28.0 | 11.4 | 11.3 | 12.5 | 14.3 |
| 10.35 | 28.0 | 28.0 | 11.9 | 12.5 | 13.8 | 12.9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalluri, S.; Alcala, C.; Carr, J.; Griffith, P.; Lebair, W.; Lindsey, D.; Race, R.; Wu, X.; Zierk, S. From Photons to Pixels: Processing Data from the Advanced Baseline Imager. Remote Sens. 2018, 10, 177. https://doi.org/10.3390/rs10020177
Kalluri S, Alcala C, Carr J, Griffith P, Lebair W, Lindsey D, Race R, Wu X, Zierk S. From Photons to Pixels: Processing Data from the Advanced Baseline Imager. Remote Sensing. 2018; 10(2):177. https://doi.org/10.3390/rs10020177
Chicago/Turabian StyleKalluri, Satya, Christian Alcala, James Carr, Paul Griffith, William Lebair, Dan Lindsey, Randall Race, Xiangqian Wu, and Spencer Zierk. 2018. "From Photons to Pixels: Processing Data from the Advanced Baseline Imager" Remote Sensing 10, no. 2: 177. https://doi.org/10.3390/rs10020177
APA StyleKalluri, S., Alcala, C., Carr, J., Griffith, P., Lebair, W., Lindsey, D., Race, R., Wu, X., & Zierk, S. (2018). From Photons to Pixels: Processing Data from the Advanced Baseline Imager. Remote Sensing, 10(2), 177. https://doi.org/10.3390/rs10020177