Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango



Abstract
1. Introduction
2. Materials and Methods
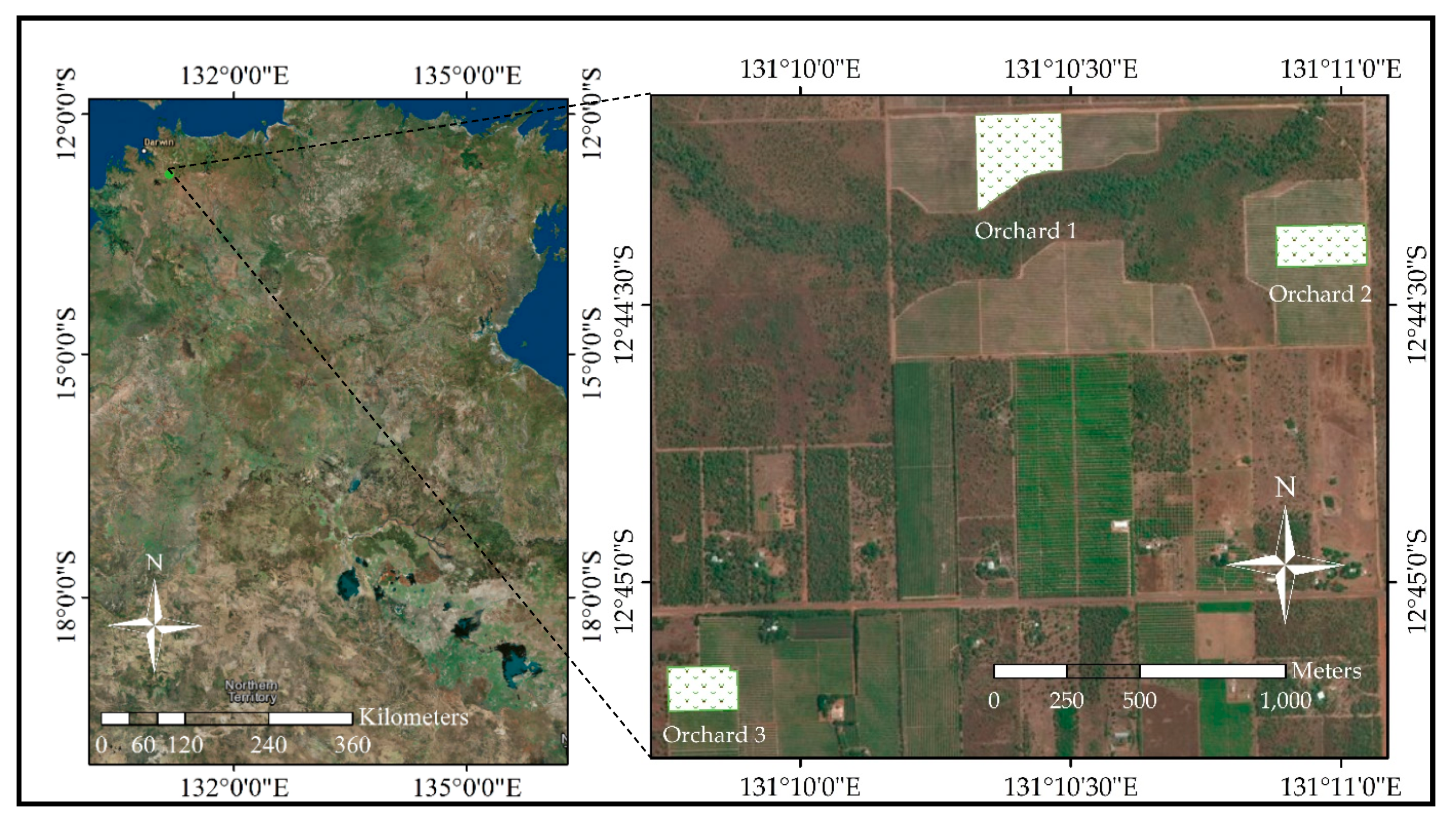
2.1. Study Area and Crop Status
2.2. Multispectral Remote Sensing Data
2.3. Sampling Trees
2.4. Field Data Collection
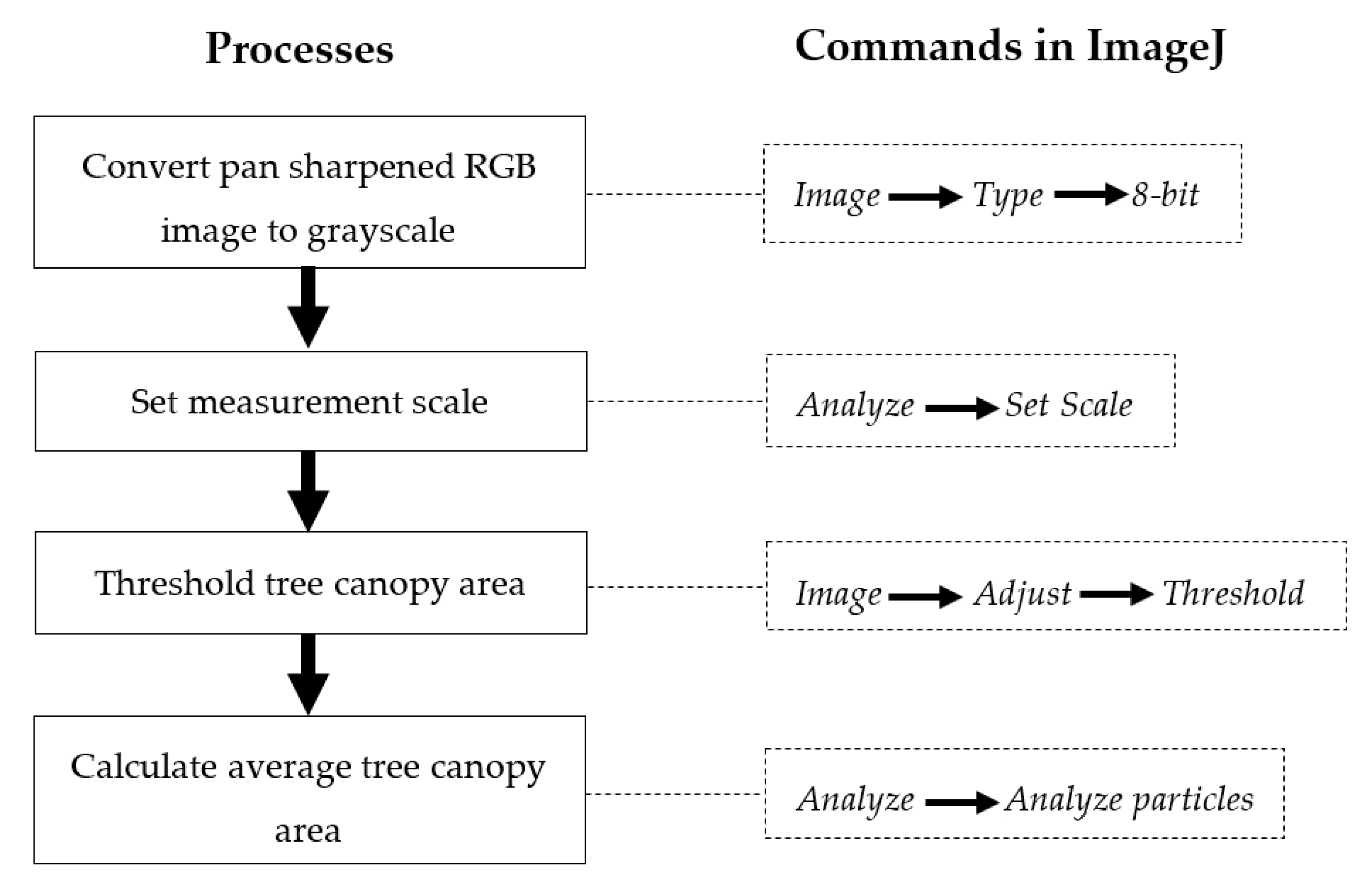
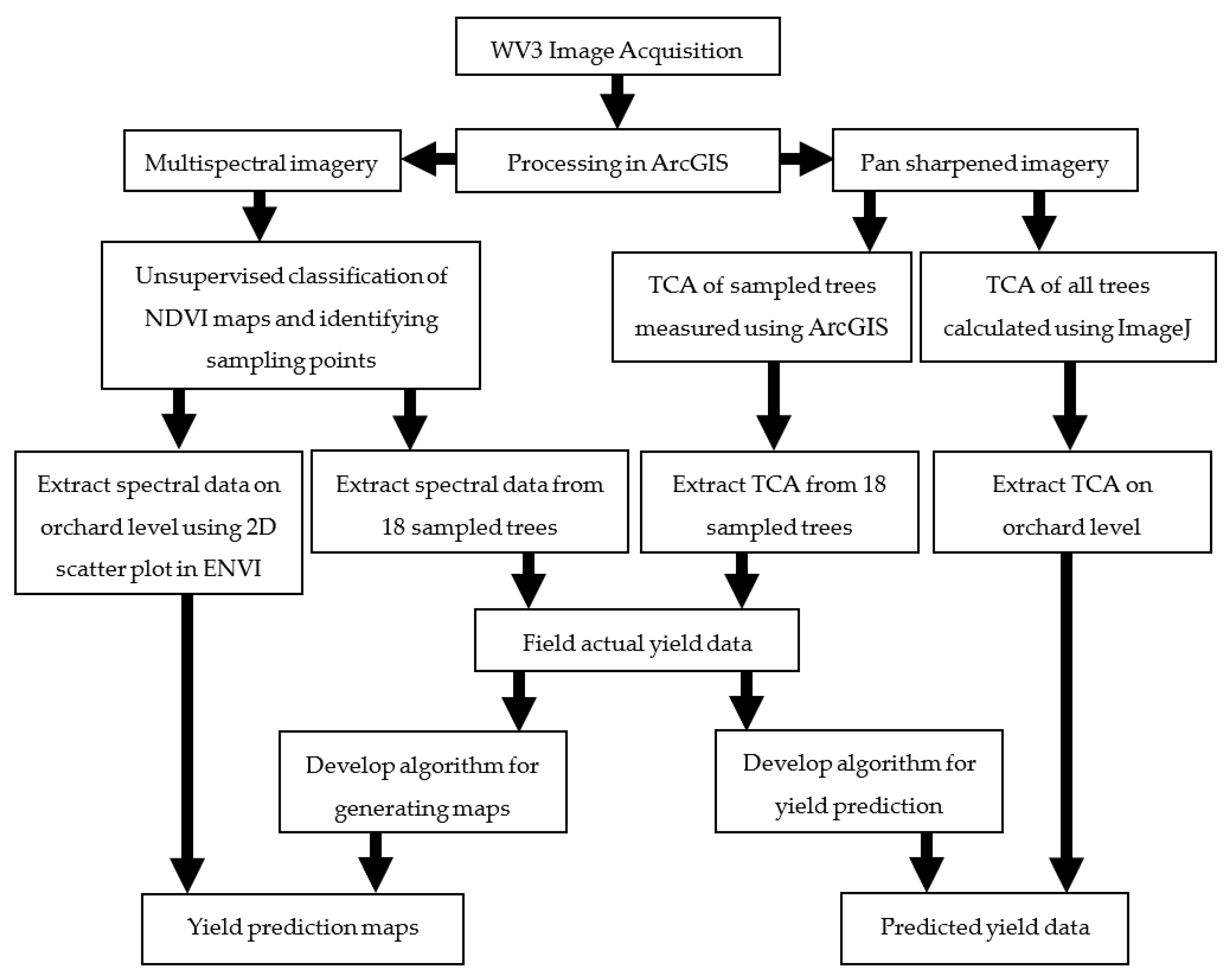
2.5. Extraction of Spectral Data and Tree Crown Area (TCA)
2.6. Machine Learning Algorithms and Other Data Analysis Techniques
2.7. Prediction of Orchard Level Yield and Generating Yield Maps
3. Results
3.1. VIs for Estimating Yield Parameters
3.2. Measurement of TCA
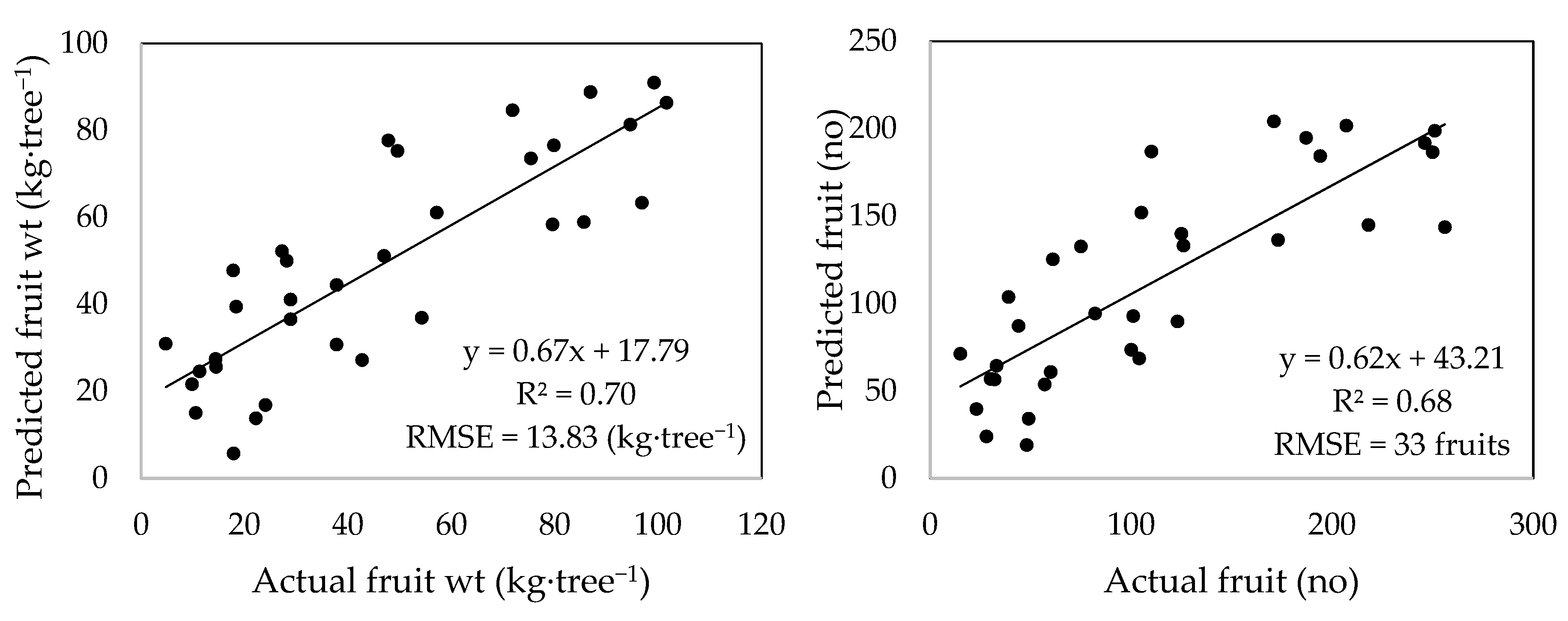
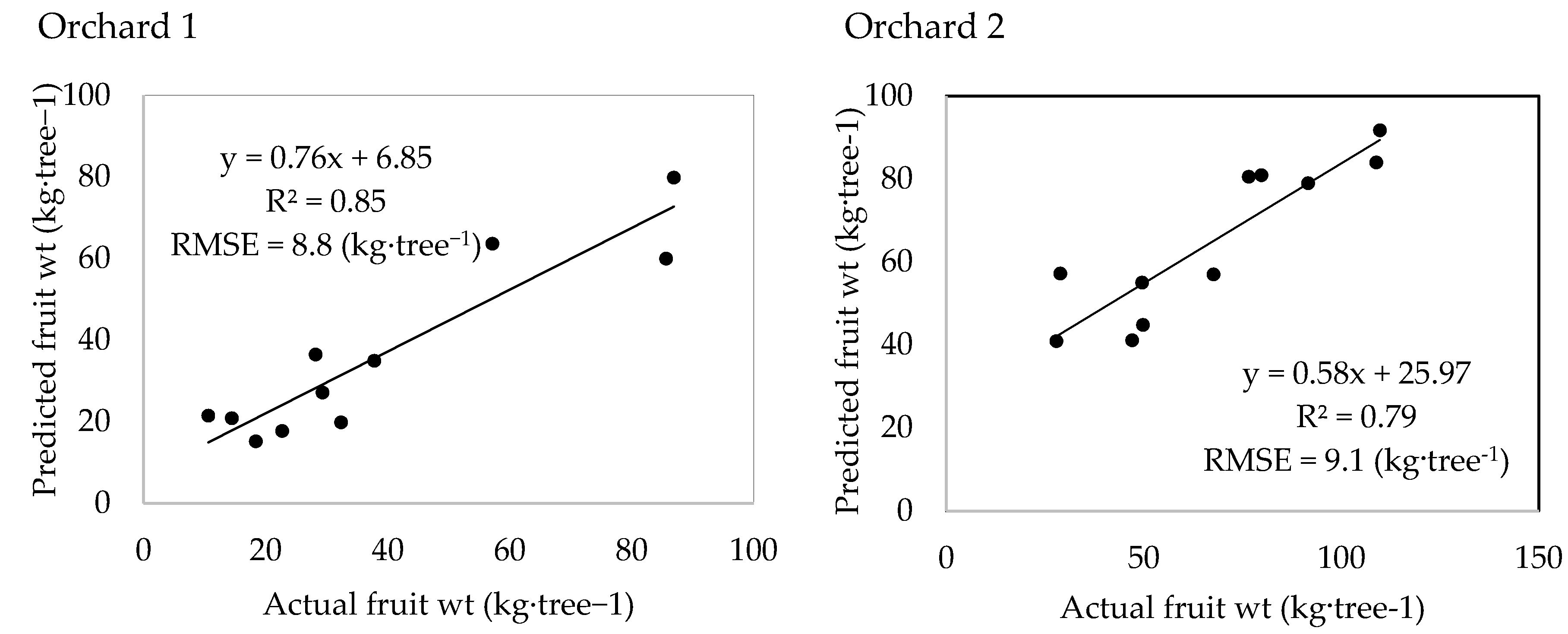
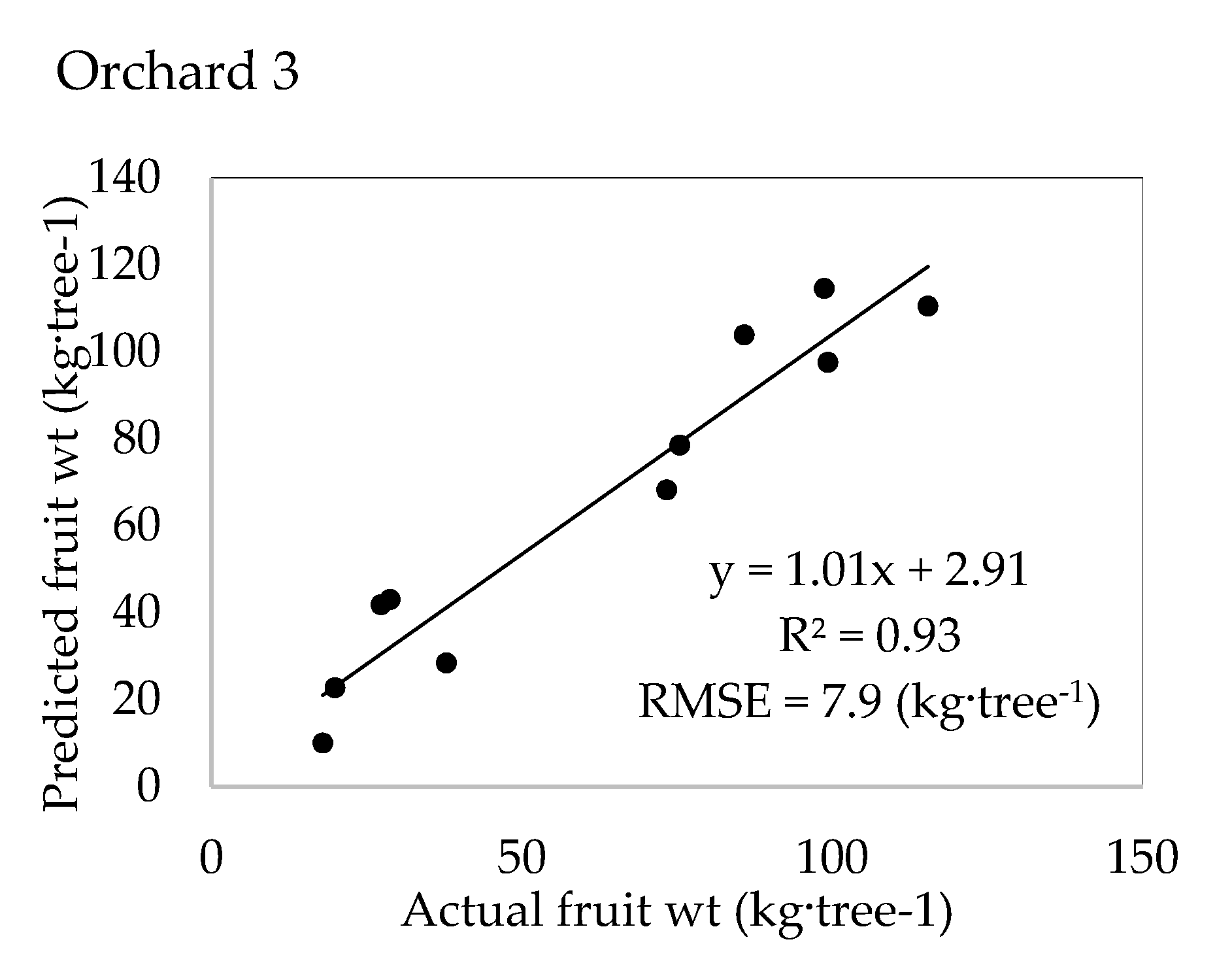
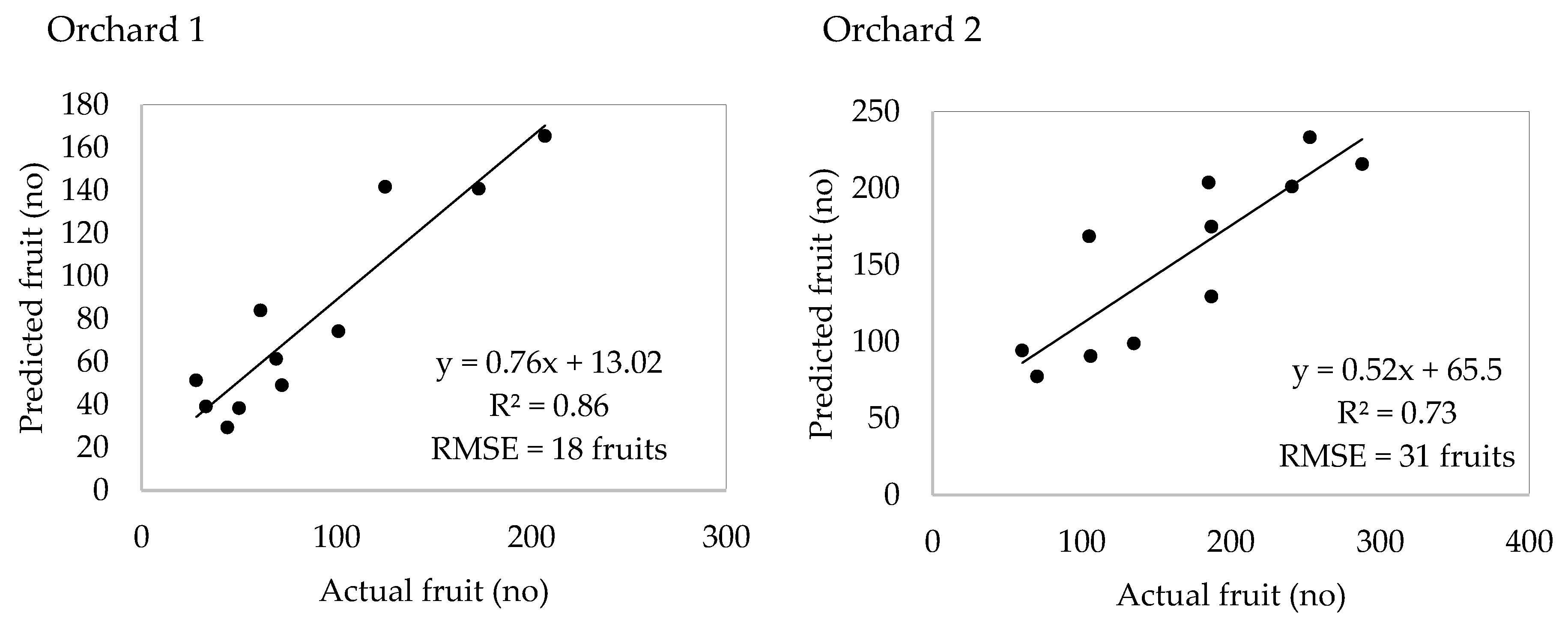
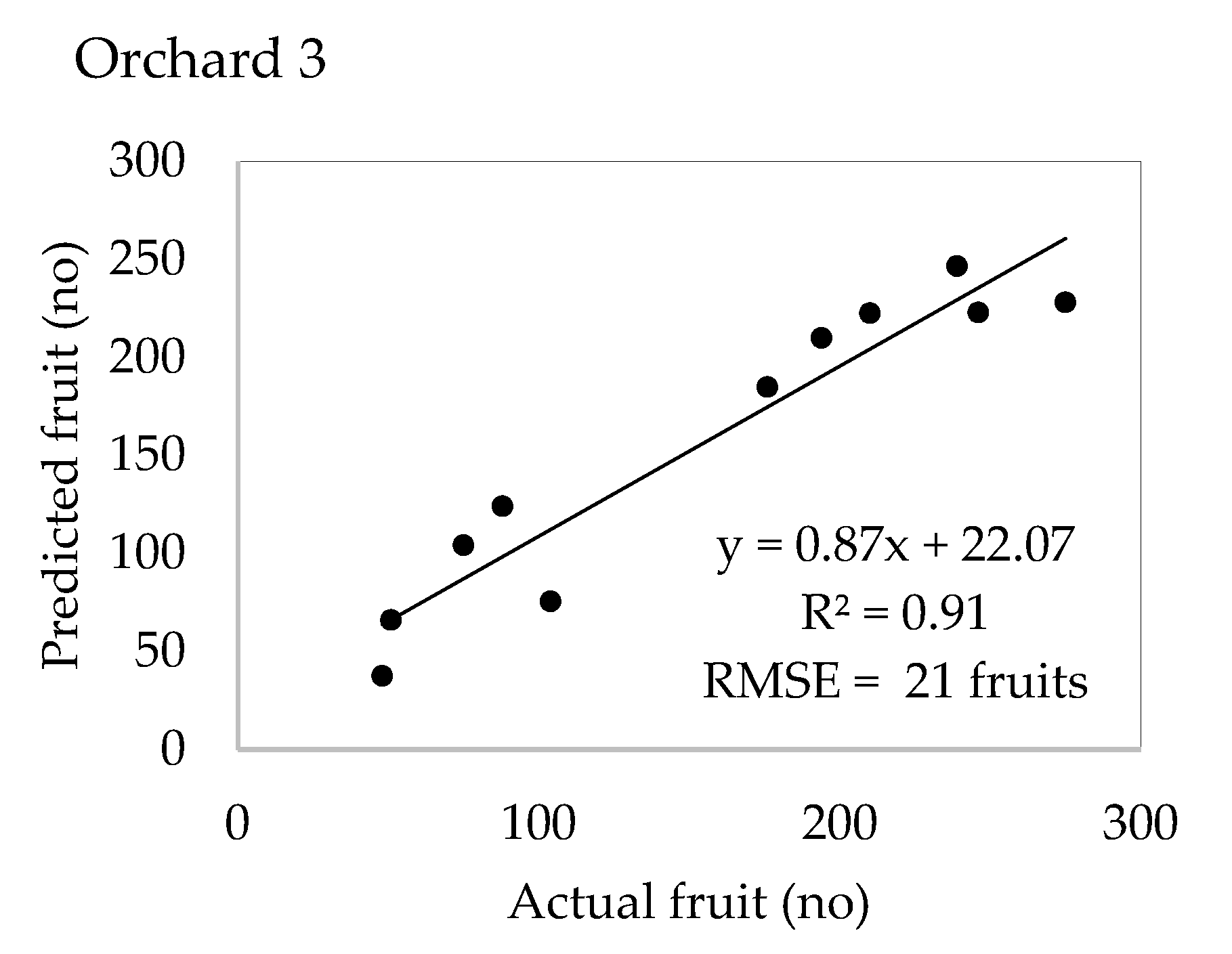
3.3. Models of Yield Parameters with combined VIs and TCA
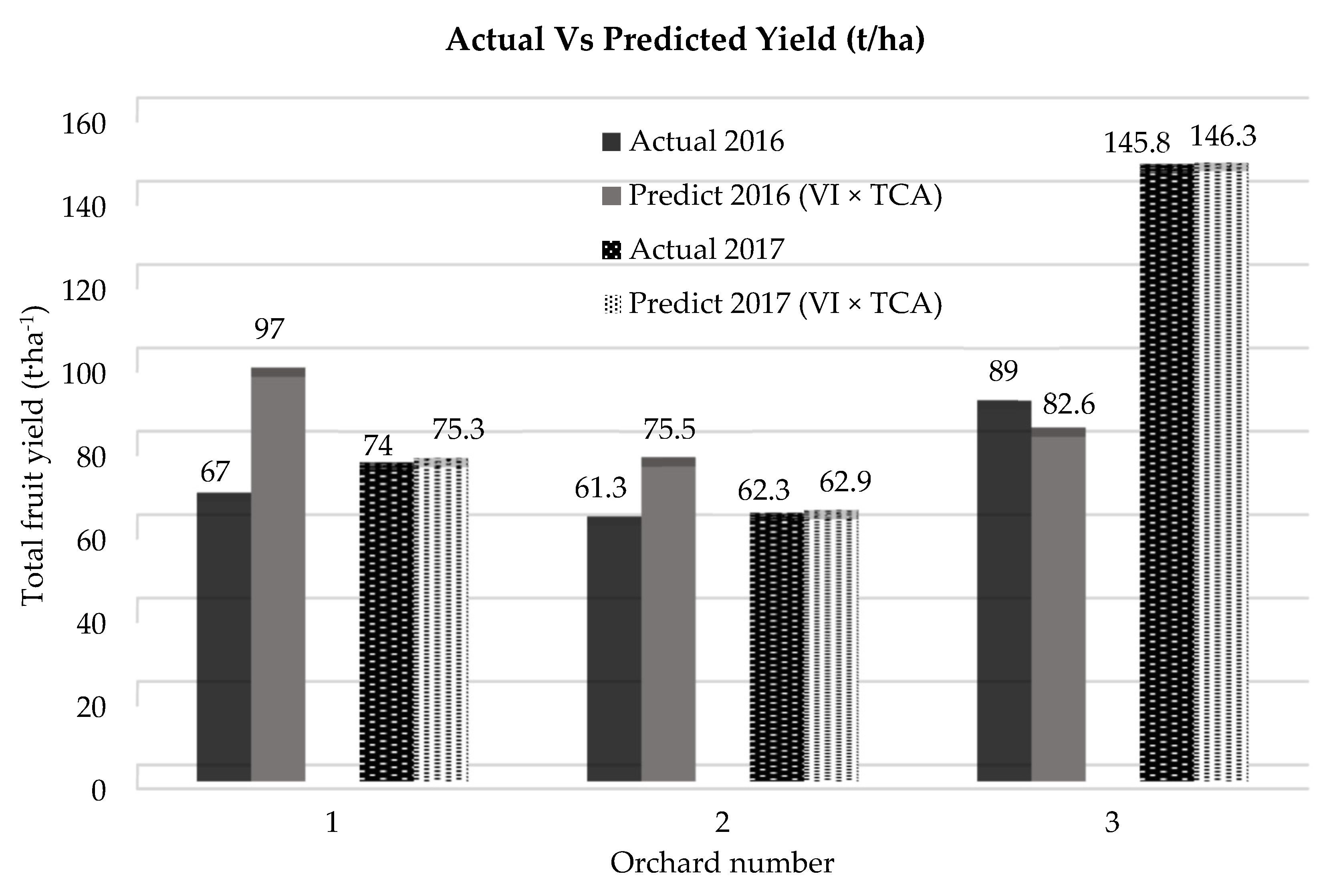
3.4. Accuracy of Orchard Level Yield Maps
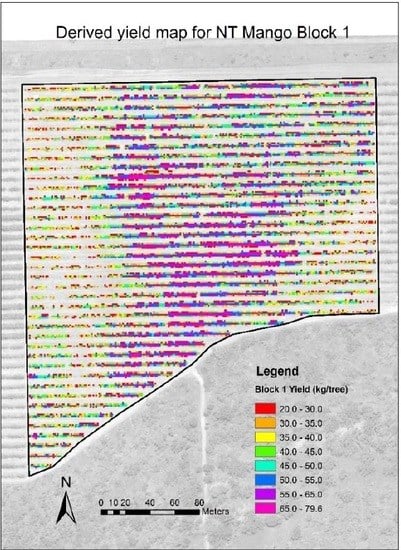
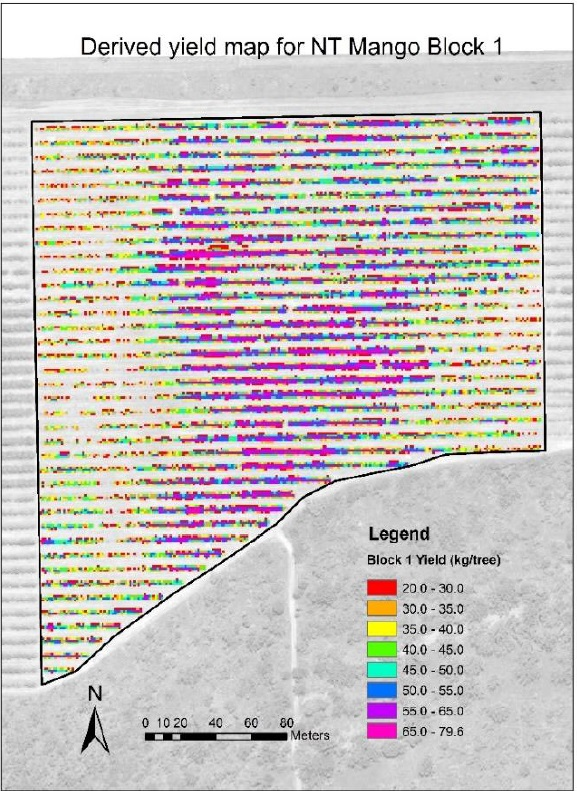
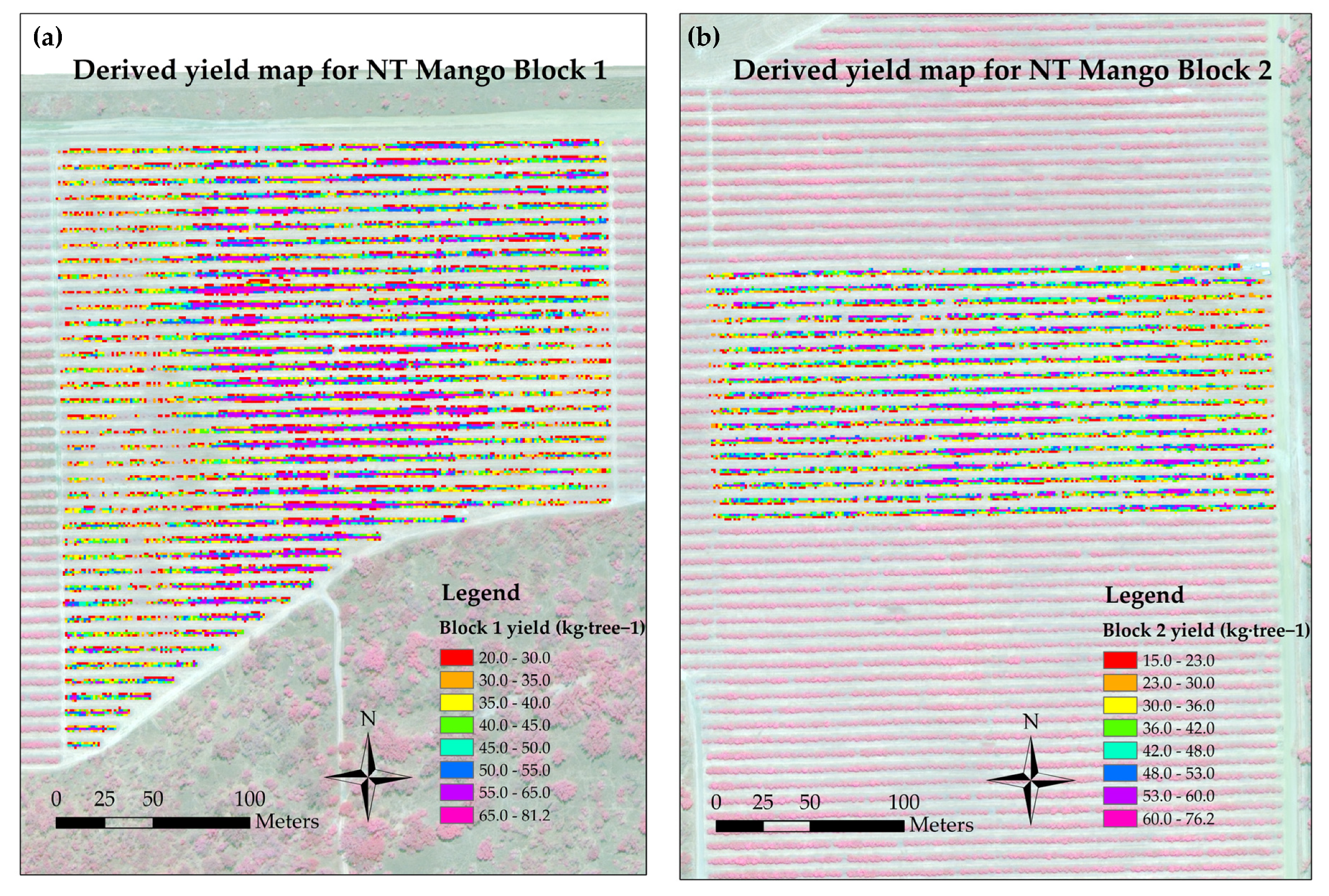
3.5. Orchard Level Yield Maps
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Payne, A.; Walsh, K.; Subedi, P.; Jarvis, D. Estimating mango crop yield using image analysis using fruit at ‘stone hardening’ stage and night time imaging. Comput. Electron. Agric. 2014, 100, 160–167. [Google Scholar] [CrossRef]
- Payne, A.B.; Walsh, K.B.; Subedi, P.P.; Jarvis, D. Estimation of mango crop yield using image analysis—Segmentation method. Comput. Electron. Agric. 2013, 91, 57–64. [Google Scholar] [CrossRef]
- Winter, F. A Simulation Model for Studying the Efficiency of Apple and Pear Orchards/Ein Simulationsmodell zur Untersuchung der Wirtschaftlichkeit von Apfel-und Birnenanlagen. Gartenbauwissenschaft 1976, 26–34. [Google Scholar]
- Köhne, S. Yield estimation based on measureable parameters. S. Afr. Avocado Growers’ Assoc. Yearb. 1985, 8, 103. [Google Scholar]
- Whiley, A.W.; Saranah, J.B.; Wolstenholme, B.N. Pheno-physiological modelling in avocado-an aid in research planning. In Proceedings of the World Avocado Congress III, Tel Aviv, Israel, 22–27 October 1995; pp. 71–75. [Google Scholar]
- Reginato, G.; De Cortázar, G.; Robinson, T.; Varela, J. Crop load expressed in terms of intercepted photosynthetically-active radiation can be used as a covariate to compare peach tree performance. J. Horticult. Sci. Biotechnol. 2007, 82, 715–720. [Google Scholar] [CrossRef]
- Viau, A.A.; Jang, J.-D.; Payan, V.; Devost, A. The use of airborne LIDAR and multispectral sensors for orchard trees inventory and characterization. FRUTIC 2005, 5, 12–16. [Google Scholar]
- Best, S.; Salazar, F.; Bastias, R.; Leon, L. Crop-load estimation model to optimize yield-Quality ratio in apple orchards, Malus Domestic Borkh, var. Royal Gala. J. Inf. Technol. Agric. 2008, 3, 11–18. [Google Scholar]
- Wright, H.; Nichols, D.; Embree, C. Evaluating the accountability of trunk size and canopy volume models for determining apple tree production potential across diverse management regimes. Acta Horticult. 2006. [Google Scholar] [CrossRef]
- Qiang, L.; Jianrong, C.; Bin, L.; Lie, D.; Yajing, Z. Identification of fruit and branch in natural scenes for citrus harvesting robot using machine vision and support vector machine. Int. J. Agric. Biol. Eng. 2014, 7, 115–121. [Google Scholar]
- Sengupta, S.; Lee, W.S. Identification and determination of the number of immature green citrus fruit in a canopy under different ambient light conditions. Biosyst. Eng. 2014, 117, 51–61. [Google Scholar] [CrossRef]
- Dorj, U.-O.; Lee, M.; Yun, S.-s. An yield estimation in citrus orchards via fruit detection and counting using image processing. Comput. Electron. Agric. 2017, 140, 103–112. [Google Scholar] [CrossRef]
- Zhou, R.; Damerow, L.; Sun, Y.; Blanke, M.M. Using colour features of cv.‘Gala’apple fruits in an orchard in image processing to predict yield. Precis. Agric. 2012, 13, 568–580. [Google Scholar] [CrossRef]
- Aggelopoulou, A.; Bochtis, D.; Fountas, S.; Swain, K.C.; Gemtos, T.; Nanos, G. Yield prediction in apple orchards based on image processing. Precis. Agric. 2011, 12, 448–456. [Google Scholar] [CrossRef]
- Bargoti, S.; Underwood, J.P. Image segmentation for fruit detection and yield estimation in apple orchards. J. Field Robot. 2017, 34, 1039–1060. [Google Scholar] [CrossRef]
- Wang, Q.; Nuske, S.; Bergerman, M.; Singh, S. Automated Crop Yield Estimation for Apple Orchards. In Experimental Robotics: The 13th International Symposium on Experimental Robotics; Desai, P.J., Dudek, G., Khatib, O., Kumar, V., Eds.; Springer International Publishing: Heidelberg, Germany, 2013; pp. 745–758. [Google Scholar] [CrossRef]
- Nuske, S.; Wilshusen, K.; Achar, S.; Yoder, L.; Narasimhan, S.; Singh, S. Automated visual yield estimation in vineyards. J. Field Robot. 2014, 31, 837–860. [Google Scholar] [CrossRef]
- Nuske, S.; Achar, S.; Bates, T.; Narasimhan, S.; Singh, S. Yield estimation in vineyards by visual grape detection. Proceedings of 2011 the IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 2352–2358. [Google Scholar]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using LiDAR and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Stein, M.; Bargoti, S.; Underwood, J. Image Based Mango Fruit Detection, Localisation and Yield Estimation Using Multiple View Geometry. Sensors 2016, 16, 1915. [Google Scholar] [CrossRef] [PubMed]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Battude, M.; Al Bitar, A.; Morin, D.; Cros, J.; Huc, M.; Marais Sicre, C.; Le Dantec, V.; Demarez, V. Estimating maize biomass and yield over large areas using high spatial and temporal resolution Sentinel-2 like remote sensing data. Remote Sens. Environ. 2016, 184, 668–681. [Google Scholar] [CrossRef]
- Rahman, M.M.; Robson, A.J. A Novel Approach for Sugarcane Yield Prediction Using Landsat Time Series Imagery: A Case Study on Bundaberg Region. Adv. Remote Sens. 2016, 5, 93–102. [Google Scholar] [CrossRef]
- Robson, A.; Rahman, M.M.; Falzon, G.; Verma, N.K.; Johansen, K.; Robinson, N.; Lakshmanan, P.; Salter, B.; Skocaj, D. Evaluating remote sensing technologies for improved yield forecasting and for the measurement of foliar nitrogen concentration in sugarcane. Proceedings of 38th Australian Society of Sugar Cane Technologists, At Mackay, Queensland, Australia, 27–29 April 2016. [Google Scholar]
- Li, Y.; Zhou, Q.; Zhou, J.; Zhang, G.; Chen, C.; Wang, J. Assimilating remote sensing information into a coupled hydrology-crop growth model to estimate regional maize yield in arid regions. Ecol. Model. 2014, 291, 15–27. [Google Scholar] [CrossRef]
- Bognár, P.; Ferencz, C.; Pásztor, S.; Molnár, G.; Timár, G.; Hamar, D.; Lichtenberger, J.; Székely, B.; Steinbach, P.; Ferencz, O.E. Yield forecasting for wheat and corn in Hungary by satellite remote sensing. Int. J. Remote Sens. 2011, 32, 4759–4767. [Google Scholar] [CrossRef]
- Ye, X.; Sakai, K.; Asada, S.I.; Sasao, A. Inter-Relationships Between Canopy Features and Fruit Yield in Citrus as Detected by Airborne Multispectral Imagery. Trans. ASABE 2008, 51, 739–751. [Google Scholar] [CrossRef]
- Ye, X.; Sakai, K.; Manago, M.; Asada, S.-i.; Sasao, A. Prediction of citrus yield from airborne hyperspectral imagery. Precis. Agric. 2007, 8, 111–125. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, K.N.; Lal, B.; Singh, R.D. Mapping of apple orchards using remote sensing techniques in cold desert of Himachal Pradesh, India. J. Indian Soc. Remote Sens. 2008, 36, 387–392. [Google Scholar] [CrossRef]
- Sharma, A.; Panigrahy, S. Apple orchard characterization using remote sensing and GIS in Shimla district of Himachal Pradesh. In Proceedings of the Remote Sensing and Photogrammetry Annual Conference, Newcastle Upon Tyne, UK, 11–14 September 2007; pp. 11–14. [Google Scholar]
- Van Beek, J.; Tits, L.; Somers, B.; Coppin, P. Stem water potential monitoring in pear orchards through WorldView-2 multispectral imagery. Remote Sens. 2013, 5, 6647–6666. [Google Scholar] [CrossRef]
- Sepulcre-Cantó, G.; Zarco-Tejada, P.; Jiménez-Muñoz, J.; Sobrino, J.; Soriano, M.; Fereres, E.; Vega, V.; Pastor, M. Monitoring yield and fruit quality parameters in open-canopy tree crops under water stress. Implications for ASTER. Remote Sens. Environ. 2007, 107, 455–470. [Google Scholar] [CrossRef]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture—A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Serrano, L.; González-Flor, C.; Gorchs, G. Assessment of grape yield and composition using the reflectance based Water Index in Mediterranean rainfed vineyards. Remote Sens. Environ. 2012, 118, 249–258. [Google Scholar] [CrossRef]
- Robson, A.; Rahman, M.M.; Muir, J. Using Worldview Satellite Imagery to Map Yield in Avocado (Persea americana): A Case Study in Bundaberg, Australia. Remote Sens. 2017, 9, 1223. [Google Scholar] [CrossRef]
- Robson, A.; Rahman, M.M.; Muir, J.; Saint, A.; Simpson, C.; Searle, C. Evaluating satellite remote sensing as a method for measuring yield variability in Avocado and Macadamia tree crops. Adv. Anim.Biosci. 2017, 8, 498–504. [Google Scholar] [CrossRef]
- Gupta, P.; Sharma, R. Application of satellite remote sensing technique in delineation and hectarge estimation of mango orchards in parts of Uttar Pradesh, India. In Proceedings of the GIS Development, Uttar pradesh, India, 12–14 March 1990; pp. 1–3. [Google Scholar]
- Nagaraja, A. Predicting susceptible areas of mango malformation through remote sensing and GIS. Ph.D. Thesis, Indian Agricultural Research Institute, New Delhi, India, 2009. [Google Scholar]
- Zhu, Y.; Liu, K.; Liu, L.; Wang, S.; Liu, H. Retrieval of mangrove aboveground biomass at the individual species level with worldview-2 images. Remote Sens. 2015, 7, 12192–12214. [Google Scholar] [CrossRef]
- Yuan, H.; Yang, G.; Li, C.; Wang, Y.; Liu, J.; Yu, H.; Feng, H.; Xu, B.; Zhao, X.; Yang, X. Retrieving soybean leaf area index from unmanned aerial vehicle hyperspectral remote sensing: Analysis of RF, ANN, and SVM regression models. Remote Sens. 2017, 9, 309. [Google Scholar] [CrossRef]
- Mas, J.F.; Flores, J.J. The application of artificial neural networks to the analysis of remotely sensed data. Int. J. Remote Sens. 2008, 29, 617–663. [Google Scholar] [CrossRef]
- Raczko, E.; Zagajewski, B. Comparison of support vector machine, random forest and neural network classifiers for tree species classification on airborne hyperspectral APEX images. Eur. J. Remote Sens. 2017, 50, 144–154. [Google Scholar] [CrossRef]
- Lek, S.; Guégan, J.-F. Artificial neural networks as a tool in ecological modelling, an introduction. Ecol. Model. 1999, 120, 65–73. [Google Scholar] [CrossRef]
- Foody, G. Using prior knowledge in artificial neural network classification with a minimal training set. Remote Sens. 1995, 16, 301–312. [Google Scholar] [CrossRef]
- Carpenter, G.A.; Gopal, S.; Macomber, S.; Martens, S.; Woodcock, C.E. A neural network method for mixture estimation for vegetation mapping. Remote Sens. Environ. 1999, 70, 138–152. [Google Scholar] [CrossRef]
- Yue, J.; Feng, H.; Yang, G.; Li, Z. A Comparison of Regression Techniques for Estimation of Above-Ground Winter Wheat Biomass Using Near-Surface Spectroscopy. Remote Sens. 2018, 10, 66. [Google Scholar] [CrossRef]
- Hassan-Esfahani, L.; Torres-Rua, A.; Jensen, A.; McKee, M. Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks. Remote Sens. 2015, 7, 2627–2646. [Google Scholar] [CrossRef]
- BOM. Bureau of Meteorology. Available online: http://www.bom.gov.au/climate/averages/tables/cw_014938_All.shtml (accessed on 5 March 2018).
- Hernández Delgado, P.M.; Aranguren, M.; Reig, C.; Fernández Galván, D.; Mesejo, C.; Martínez Fuentes, A.; Galán Saúco, V.; Agustí, M. Phenological growth stages of mango (Mangifera indica L.) according to the BBCH scale. Sci. Horticult. 2011, 130, 536–540. [Google Scholar] [CrossRef]
- Digital Globe. WorldView 3 Datasheet. 2017. Available online: https://dg-cms-uploads-production.s3.amazonaws.com/uploads/document/file/95/DG2017_WorldView-3_DS.pdf (accessed on 22 March 2018).
- Kuester, M. Radiometric Use of WorldView-3 Imagery; DigitalGlobe: Longmont, CO, USA, 2016. [Google Scholar]
- Robson, A.J.; Petty, J.; Joyce, D.C.; Marques, J.R.; Hofman, P.J. High resolution remote sensing, GIS and Google Earth for avocado fruit quality mapping and tree number auditing. Proceedings of 29th International Horticultural Congress, Brisbane Convention and Exhibition Centre, Brisbane, Queensland, Australia, 17–22 August 2014. [Google Scholar]
- Rueda, C.A.; Greenberg, J.A.; Ustin, S.L. StarSpan: A Tool for Fast Selective Pixel Extraction from Remotely Sensed Data; Center for Spatial Technologies and Remote Sensing (CSTARS), University of California at Davis: Davis, CA, USA, 2005. [Google Scholar]
- R Development Core Team. R: A Language and Environment for Statistical Computing (Version 3.5); R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Tuszynski, J.; Tuszynski, M.J. The caTools Package. 2007. Available online: https://cran.r-project.org/web/packages/caTools/caTools.pdf (accessed on 12 October 2018).
- Günther, F.; Fritsch, S. Neuralnet: Training of neural networks. R J. 2010, 2, 30–38. [Google Scholar]
- Candel, A.; Parmar, V.; LeDell, E.; Arora, A. Deep learning with H2O; H2O. ai Inc.: Mountain View, CA, USA, 2016. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533. [Google Scholar] [CrossRef]
- Yi, Q.; Jiapaer, G.; Chen, J.; Bao, A.; Wang, F. Different units of measurement of carotenoids estimation in cotton using hyperspectral indices and partial least square regression. ISPRS J. Photogramm. Remote Sens. 2014, 91, 72–84. [Google Scholar] [CrossRef]
- Lötze, E.; Bergh, O. Early prediction of harvest fruit size distribution of an apple and pear cultivar. Sci. Horticult. 2004, 101, 281–290. [Google Scholar] [CrossRef]
- Ozdemir, I. Estimating stem volume by tree crown area and tree shadow area extracted from pan-sharpened Quickbird imagery in open Crimean juniper forests. Int. J. Remote Sens. 2008, 29, 5643–5655. [Google Scholar] [CrossRef]
- Whiteside, T.; Ahmad, W. Estimating canopy cover from eucalypt dominant tropical savanna using the extraction of tree crowns from very high resolution imagery. In Proceedings of the GEOBIA, 2008—Pixels, Objects, Intelligence: Geographic Object Based Image Analysis for the 21st Century, Calgary, AB, Canada, 5–8 August 2008. [Google Scholar]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Fernández-Escobar, R.; Peña, J. Characterizing olive tree geometric features using unmanned aerial vehicle (UAV) images. In Proceedings of the OLIVEBIOTEQ 2014, Amman, Jordan, 3–6 November 2014; p. 194. [Google Scholar]
- Chemura, A.; van Duren, I.; van Leeuwen, L.M. Determination of the age of oil palm from crown projection area detected from WorldView-2 multispectral remote sensing data: The case of Ejisu-Juaben district, Ghana. ISPRS J. Photogramm. Remote Sens. 2015, 100, 118–127. [Google Scholar] [CrossRef]
- Verma, N.K.; Lamb, D.W.; Reid, N.; Wilson, B. Comparison of canopy volume measurements of scattered eucalypt farm trees derived from high spatial resolution imagery and LiDAR. Remote Sens. 2016, 8, 388. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orchards | Total Fruit Weight (kg·tree−1) | Total Fruit Number | |||||
|---|---|---|---|---|---|---|---|
| Best VI from Stepwise Regression and Biplot | Formula | R2 | Best VI from Stepwise Regression and Biplot | Formula | R2 | ||
| All orchards (2 years) | NDVI red-edge | 0.26 | NDVI red-edge | 0.30 | |||
| Orchard 1 (2 years) | RDVI2 | 0.60 | RDVI2 | 0.63 | |||
| Orchard 2 (2 years) | RDVI1 | 0.62 | RDVI1 | 0.63 | |||
| Orchard 3 (2 years) | R/N2NDVI | 0.56 | SIPI | 0.60 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.M.; Robson, A.; Bristow, M. Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango. Remote Sens. 2018, 10, 1866. https://doi.org/10.3390/rs10121866
Rahman MM, Robson A, Bristow M. Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango. Remote Sensing. 2018; 10(12):1866. https://doi.org/10.3390/rs10121866
Chicago/Turabian StyleRahman, Muhammad Moshiur, Andrew Robson, and Mila Bristow. 2018. "Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango" Remote Sensing 10, no. 12: 1866. https://doi.org/10.3390/rs10121866
APA StyleRahman, M. M., Robson, A., & Bristow, M. (2018). Exploring the Potential of High Resolution WorldView-3 Imagery for Estimating Yield of Mango. Remote Sensing, 10(12), 1866. https://doi.org/10.3390/rs10121866