The Improved Cellular Automata and Its Application in Delineation of Urban Spheres of Influence

Abstract
:1. Introduction
2. Neighborhood Metric of Standard CA
2.1. Understanding and Definition of CA-Diffusion Issues
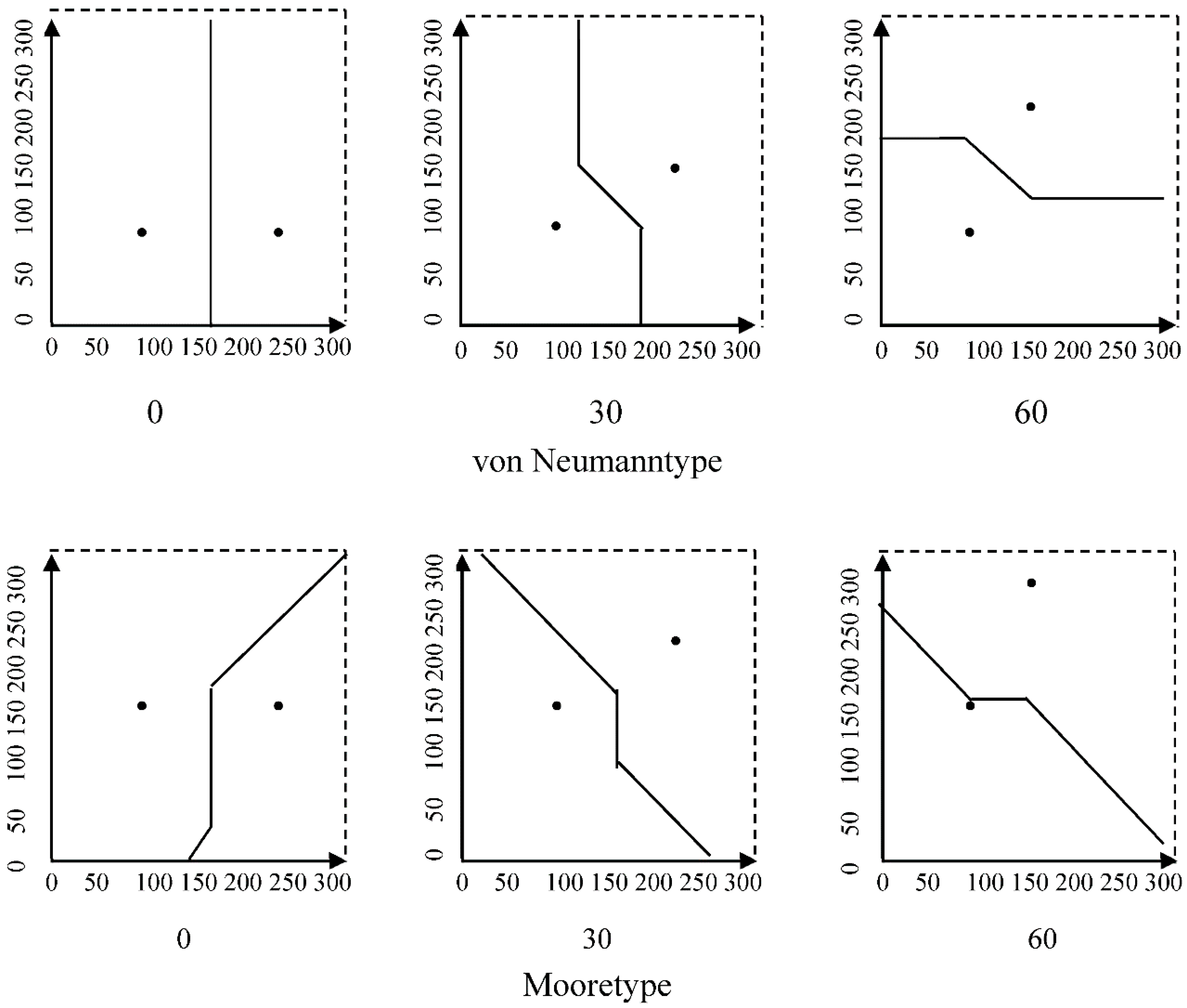
2.2. Standard Metric Methods of Neighborhood and Its Evolution Pattern

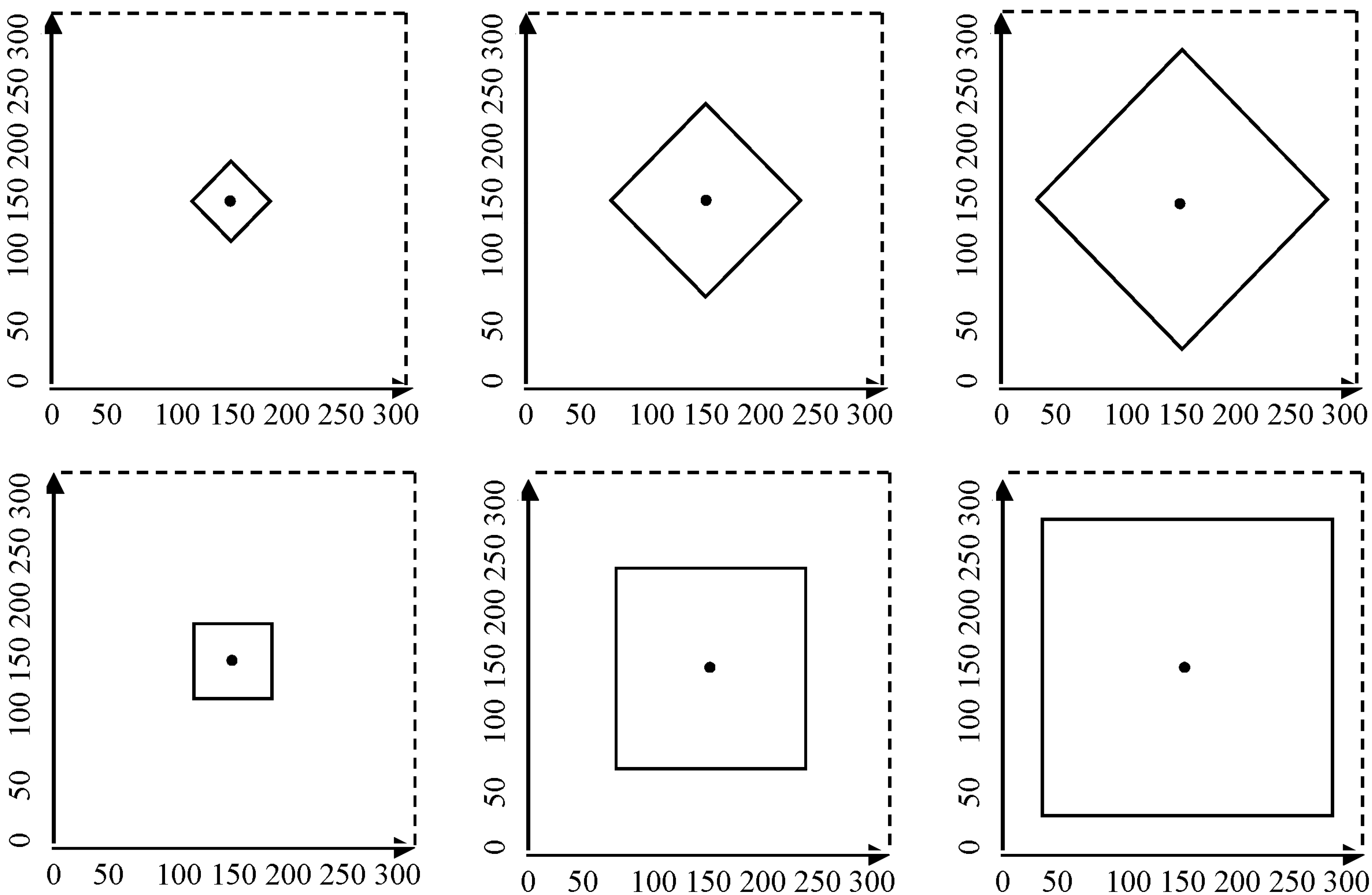
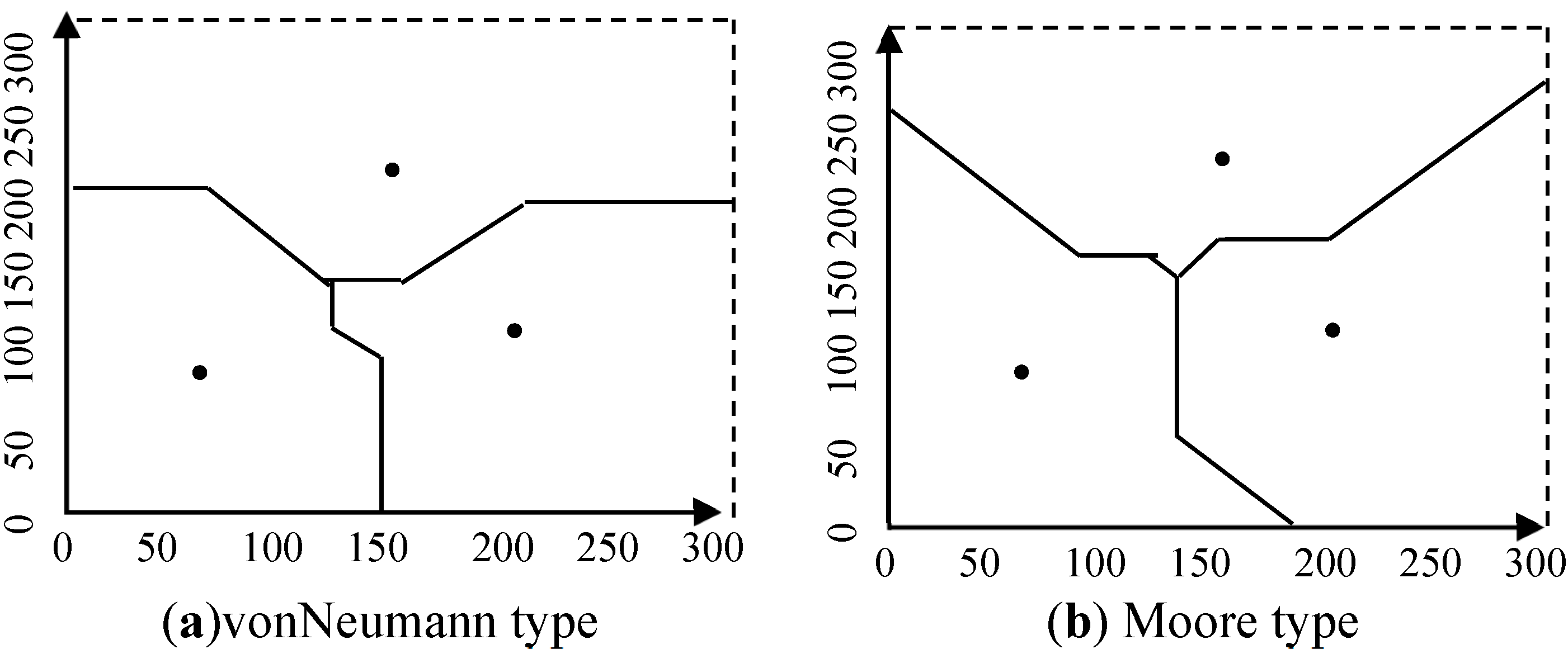
2.3. Uncertainty of Spatial Pattern
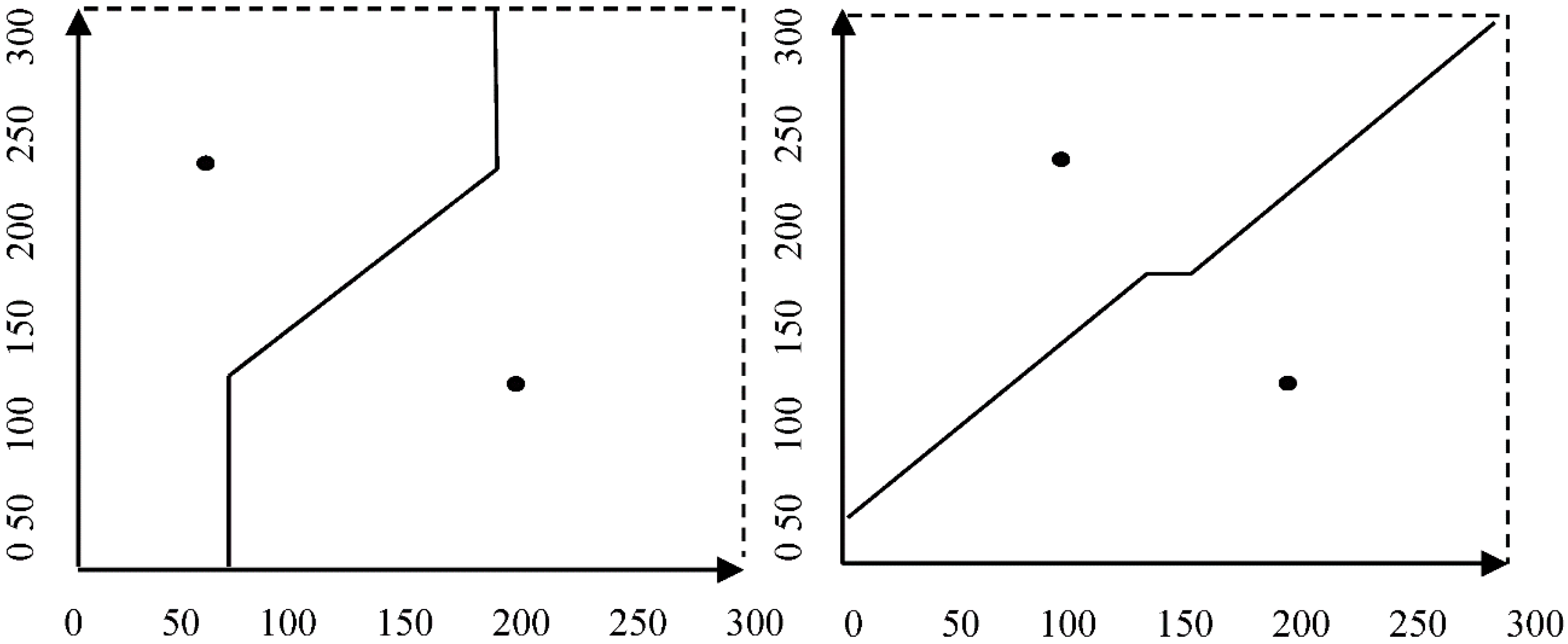
3. Metric of CA’s Neighborhood Based on Map Algebra
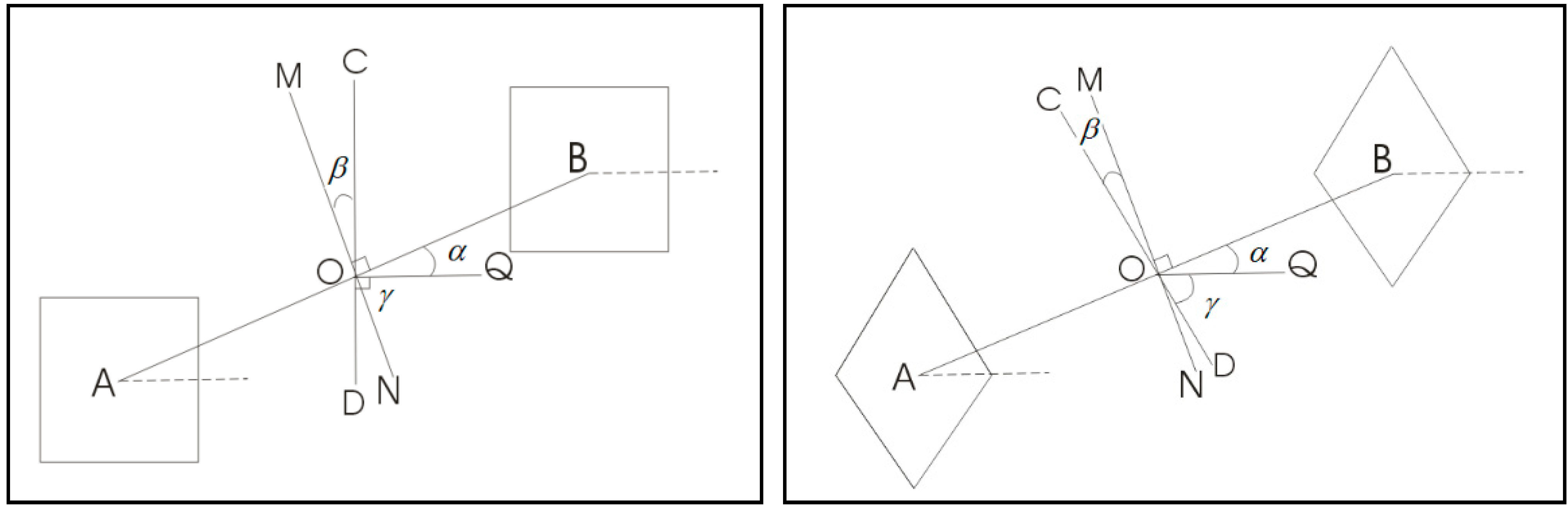
3.1. Basic Principles and the Definition of Diffusion
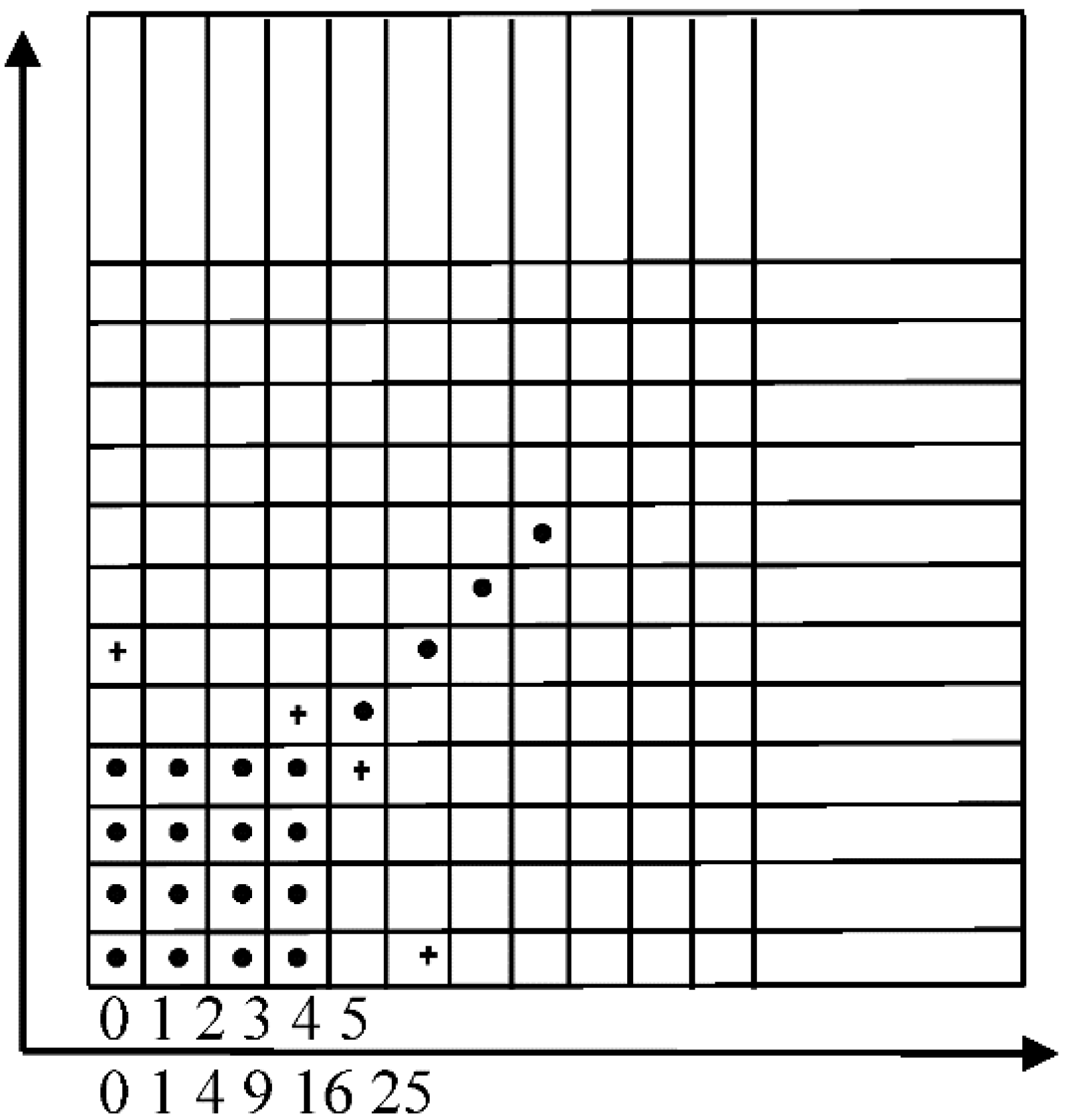
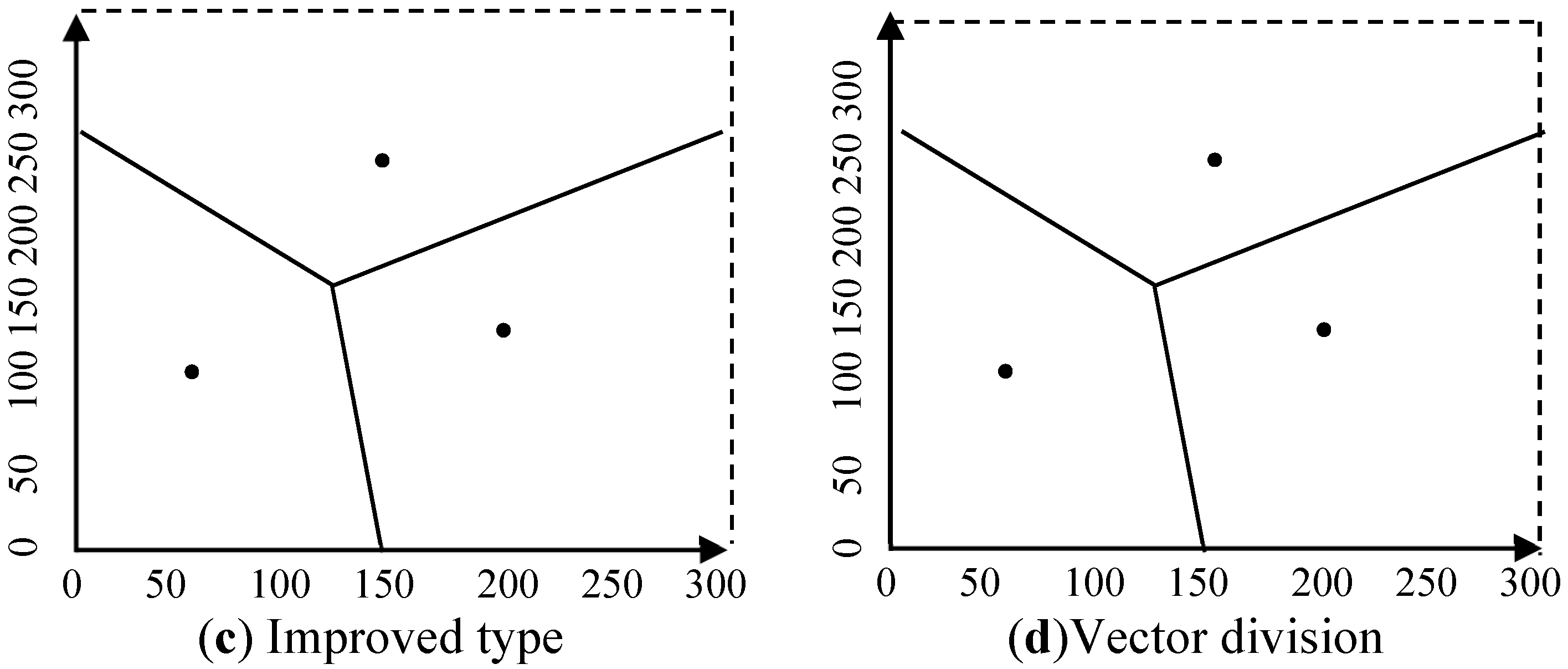
3.2. Improved Metric Method of Neighborhoods and Its Evolution Pattern

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
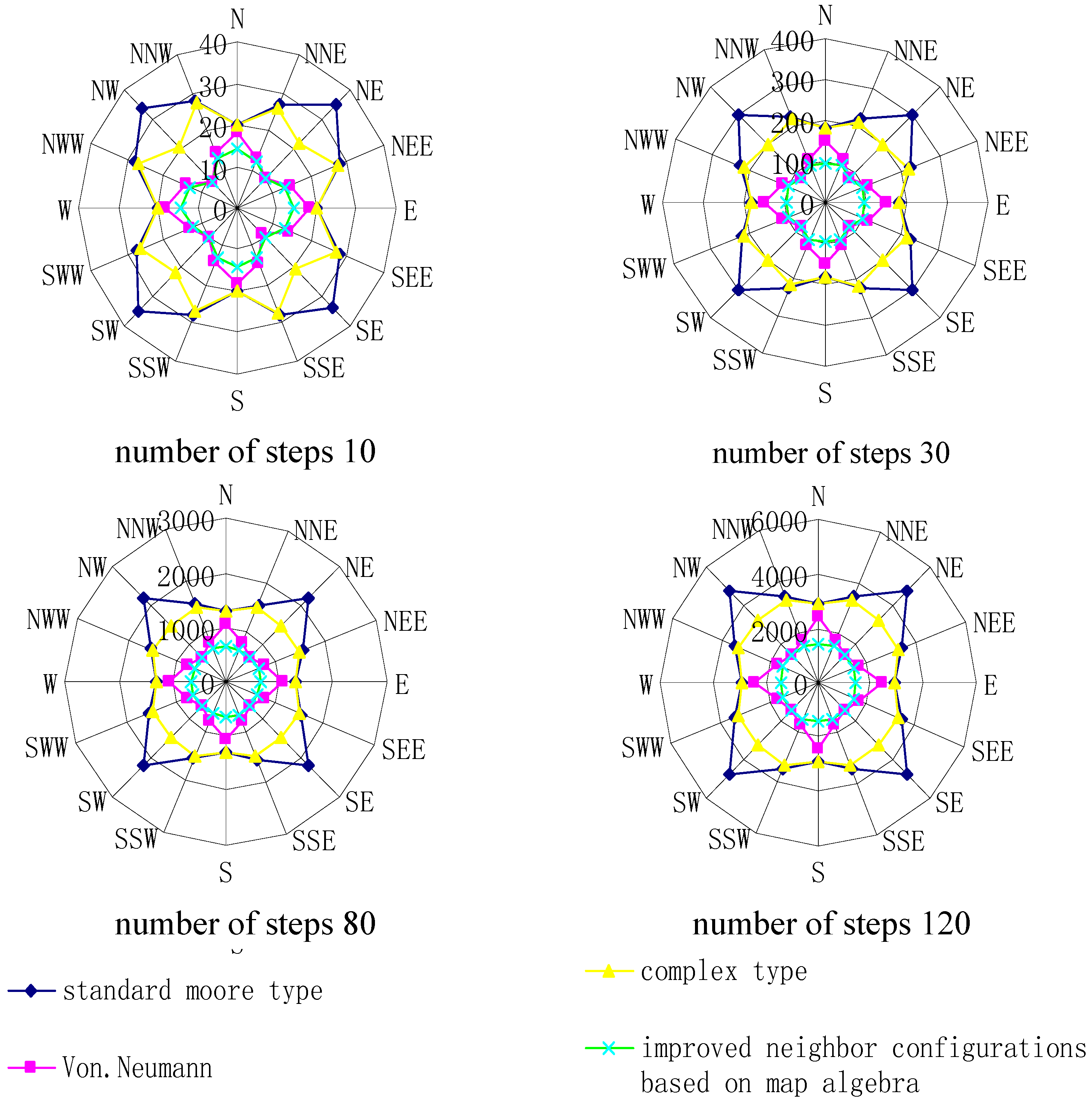
| Number of Steps | Kind of Neighborhood | Range | Minimum | Maximum | Mean | Standard Deviation |
|---|---|---|---|---|---|---|
| 10 | Standard Moore type | 15 | 20 | 35 | 27.5 | 5.31 |
| von Neumann type | 9 | 9 | 18 | 13.75 | 3.13 | |
| Compound type | 7 | 20 | 27 | 23.75 | 3.17 | |
| Improved type based on map algebra | 5 | 9 | 14 | 12.31 | 1.66 | |
| 30 | Standard Moore type | 121 | 180 | 301 | 232.5 | 44.7 |
| von Neumann type | 63 | 87 | 150 | 116.25 | 22.97 | |
| Compound type | 36 | 180 | 216 | 202.5 | 15.26 | |
| Improved type based on map algebra | 14 | 87 | 101 | 96.31 | 5.49 | |
| 80 | Standard Moore type | 855 | 1280 | 2135 | 1620 | 324.77 |
| Von Neumann type | 436 | 632 | 1068 | 810 | 164.36 | |
| Compound type | 196 | 1280 | 1476 | 1415 | 82.92 | |
| Improved type based on map algebra | 28 | 632 | 660 | 649.31 | 11.67 | |
| 120 | Standard Moore type | 1921 | 2880 | 4801 | 3630 | 734.11 |
| Von Neumann type | 972 | 1428 | 2400 | 1815 | 369.25 | |
| Compound type | 414 | 2880 | 3294 | 3172.5 | 176.98 | |
| Improved type based on map algebra | 33 | 1424 | 1457 | 1443.81 | 14.09 |
3.3. Simulation Study
4. Research on Weighted CA Diffusion Model and Its Application
4.1. Data Sources and Illustrations
4.2. Rule Making of CA
4.3. Mathematical Definition of Determination of CA-Based Urban Affecting Area
4.4. Analysis of Result


5. Conclusions and Prospects
Acknowledgments
Conflicts of Interests
References
- Zhou, C.H.; Sun, Z.L.; Xie, Y.C. Reasrch of Geographic Cellular Automata; Science Press: Beijing, China, 1999. [Google Scholar]
- Neumann, J.V. The General and Logical Theory of Automata; Pergamon Press: London, UK, 1963. [Google Scholar]
- Von Neumann, J. Theory of Self-Reproducing Automata; University of Illinois Press: Champaign, IL, USA, 1966. [Google Scholar]
- Ulam, S. Adventures of a Mahematician; University of California Press: Oakland, CA, USA, 1991. [Google Scholar]
- Burks, A.W. Eassys on Celualr Automata; University of Illinois Press: Champaign, IL, USA, 1970. [Google Scholar]
- Xie, H.M. Nonlinear Scientific Series: Complexity and Dynamic System; Shanghai Science and Technology Education Press: Shanghai, China, 1994. [Google Scholar]
- Jenertte, G.D.; Wu, J. Analysis and simulation of land-use change in the central Arizona-Phoenix region, USA. Landsc. Ecol. 2001, 16, 611–626. [Google Scholar]
- Menard, A.; Marceau, D.J. Simulating the impact of forest management scenarios in an agricultural landscape of southern Quebec, Canada, using ageographic cellular automata. Landsc. Urban. Plan. 2007, 79, 253–265. [Google Scholar] [CrossRef]
- Semboloni, F. The growth of an urban cluster into a dynamic self-modifying spatial pattern. Environ. Plan. B Plan. Des. 2000, 27, 549–564. [Google Scholar] [CrossRef]
- Stevens, D.; Dragicevic, S.; Rothley, K. City: A GIS-CA modelling tool for urban planning and decision making. Environ. Model. Softw. 2007, 22, 761–773. [Google Scholar] [CrossRef]
- Sun, T.; Wang, J. A traffic cellular automata model based on road network grids and its spatial and temporal resolution’s influences on simulation. Simul. Model. Pract. Theory 2007, 15, 864–878. [Google Scholar] [CrossRef]
- Chen, Q.; Mynett, A.E. Effects of cells size and configuration in cellular automata based prey-predator modeling. Simul. Model. Pract. Theory 2003, 11, 609–625. [Google Scholar] [CrossRef]
- Jantz, C.A.; Goetz, S.J. Analysis of scale dependencies in an urban land-use change model. Int. J. Geogr. Inf. Sci. 2005, 19, 217–241. [Google Scholar] [CrossRef]
- Li, X.; Ye, J.A. Constrained Cellular Automata for Modelling Sustainable Urban Forms. J. Geogr. Sci. 1999, 54, 289–298. [Google Scholar]
- Wu, F.; Martin, D. Urban expansion simulation of Southeast England using population surface modelling and celular automata. Environ. Plan. A 2002, 34, 1855–1876. [Google Scholar] [CrossRef]
- Li, C.M.; Chen, J. Generation of Voronoi Diagram for Entities by Dynamic Distance Transformation. Theor. Res. 2000, 1, 6–10. [Google Scholar]
- Hu, P.; Y, L.; Yang, C.Y.; Wu, Y.L. Map Algebra; Wuhan University Press: Wuhan, China, 2002. [Google Scholar]
- Gu, C.; Pang, H. Study on Spatial Relations of Chinese Urban System: Gravity Model Approach. Geogr. Res. 2008, 27, 2–10. [Google Scholar]
- Du, G.Q. Using GIS for analysis of urban system. Geo J. 2001, 52, 213–221. [Google Scholar]
- Huff, D.L.; Lutz, J.M. Urban Spheres of Influence in Ghana. J. Dev. Areas. 1989, 23, 201–220. [Google Scholar]
- Huff, D.L.; Lutz, J.M. Change and Continuity in the Irish Urban System, 1966–1981. Urban. Stud. 1995, 32, 155–173. [Google Scholar] [CrossRef]
- Gold, C.M. The meaning of “neighbour”. In Theories and Methods of Spatio-Temporal Reasoning in Geographic Space; Springer-Verlag: Berlin, Germany, 1992; pp. 220–235. [Google Scholar]
- Okabe, A.; Boots, B.; Sugihara, K.; Chiu, S.N. Spatial Tessellations, Conceptsand Applications of Voronoi Diagrams; John Wiley & Sons Ltd.: New York, NY, USA, 2000. [Google Scholar]
- Deng, Y.; Liu, S.H.; Wang, L.; Ma, H.Q.; Wang, J.H. Field Modeling Method for Identifying Urban Spheres of Influence: A Case Study on Central China. Chin. Geogra. Sci. 2010, 20, 353–362. [Google Scholar] [CrossRef]
- Wang, K.Y.; Deng, Y.; Sun, D.W.; Song, T. Evolution and spatial patterns of spheres of urban influence in China. Chin. Geogra. Sci. 2014, 24, 126–136. [Google Scholar] [CrossRef]
- Wang, H.; Deng, Y.; Tian, E.Z.; Wang, K.Y. A comparative study of methods for delineating sphere of urban influence: A case study on central China. Chin. Geogra. Sci. 2014, 24, 1–12. [Google Scholar] [CrossRef]
- Wang, X.; Wu, D.T.; Wang, H.Q. An attempt to calculate economic links between cities. Urban. Dev. 2006, 3, 55–59. [Google Scholar]
- Reilly, W.J. Methods for the Study of Retail Relationship. Univ. Texas Bull. 1929, 2944, 29–44. [Google Scholar]
- Carley, M. Urban Partnerships, Governance and the Regeneration of Britain’s Cities. Int. Plan. Stud. 2000, 5, 273–298. [Google Scholar] [CrossRef]
- Huff, D.L. The Delineation of a National System of Planning Regions on the Basis of Urban Spheres of Influence. Reg. Stud. 1973, 7, 323–329. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Y. The Improved Cellular Automata and Its Application in Delineation of Urban Spheres of Influence. Sustainability 2014, 6, 8931-8950. https://doi.org/10.3390/su6128931
Deng Y. The Improved Cellular Automata and Its Application in Delineation of Urban Spheres of Influence. Sustainability. 2014; 6(12):8931-8950. https://doi.org/10.3390/su6128931
Chicago/Turabian StyleDeng, Yu. 2014. "The Improved Cellular Automata and Its Application in Delineation of Urban Spheres of Influence" Sustainability 6, no. 12: 8931-8950. https://doi.org/10.3390/su6128931
APA StyleDeng, Y. (2014). The Improved Cellular Automata and Its Application in Delineation of Urban Spheres of Influence. Sustainability, 6(12), 8931-8950. https://doi.org/10.3390/su6128931