
Lane-Changing Risk Prediction on Urban Expressways: A Mixed Bayesian Approach for Sustainable Traffic Management



Abstract
1. Introduction
- Development of a Bayesian Network Model: This study introduces a Bayesian network model that predicts vehicle lane-changing trends with a high degree of accuracy (86.74%). The model’s strength lies in its ability to handle the uncertainty of input data and its adaptability to varying traffic conditions.
- Integration of Driver Learning Process: Unlike previous probability-based methods, this study’s model takes into account the learning process of drivers during lane-changing maneuvers, providing a more comprehensive understanding of the decision-making process involved in lane changes.
- Enhanced Risk Assessment under High-Density Traffic: This research provides a robust tool for assessing lane-changing risks under high-density traffic conditions, which is crucial for urban expressways where traffic congestion is prevalent. The model’s predictive capabilities can significantly contribute to traffic safety and management strategies.
2. Materials and Methods
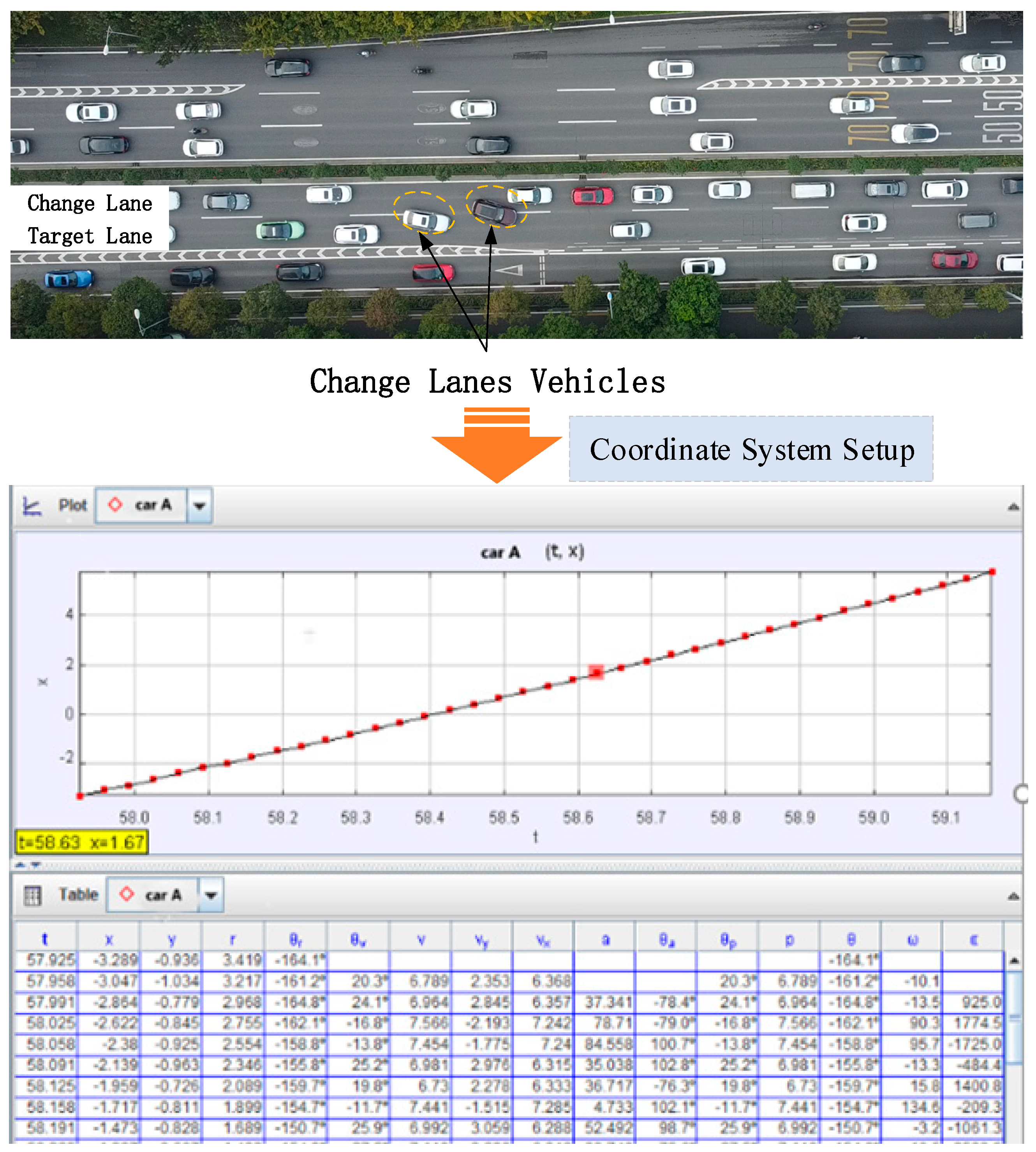
2.1. Data Discretization
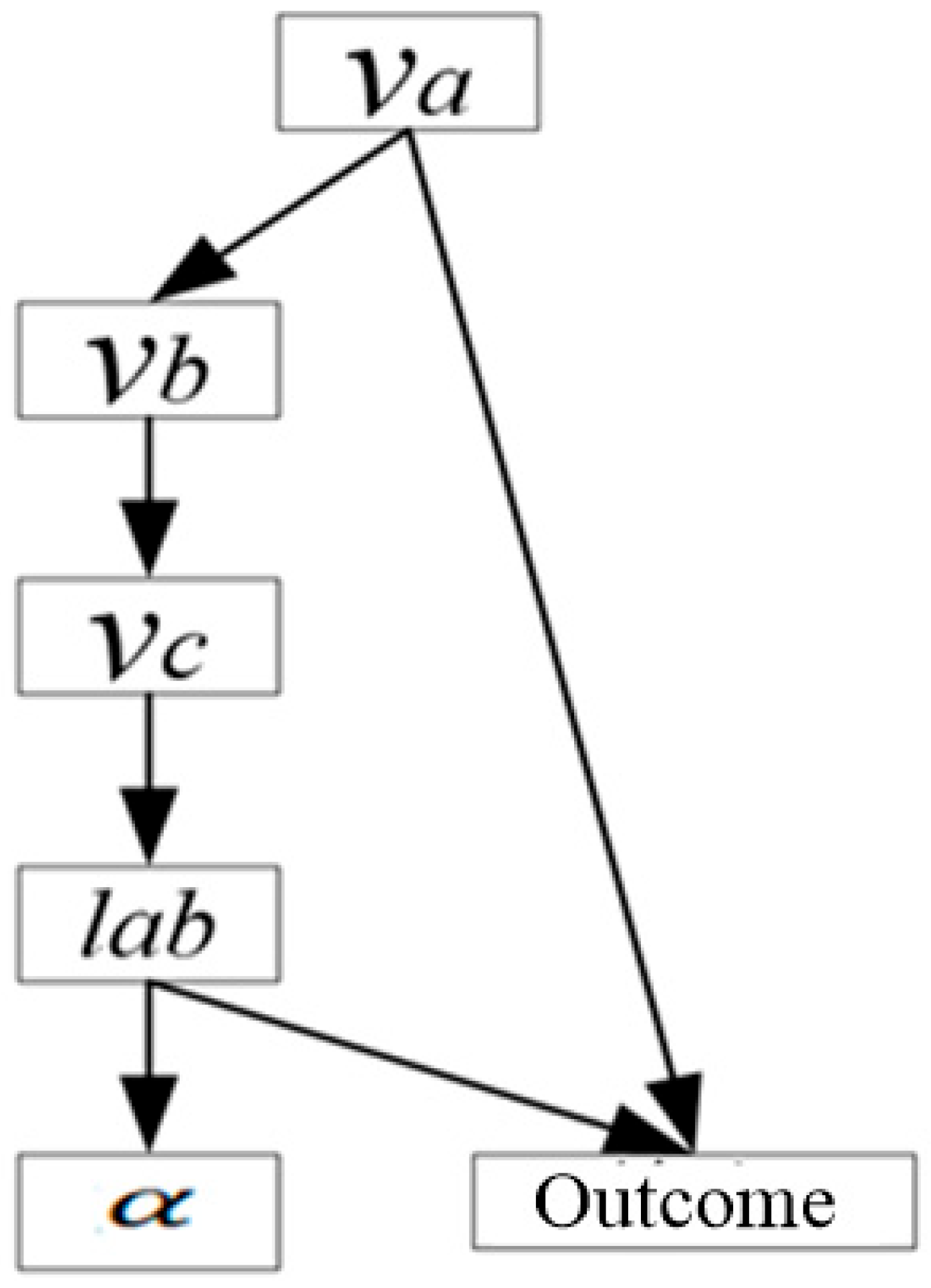
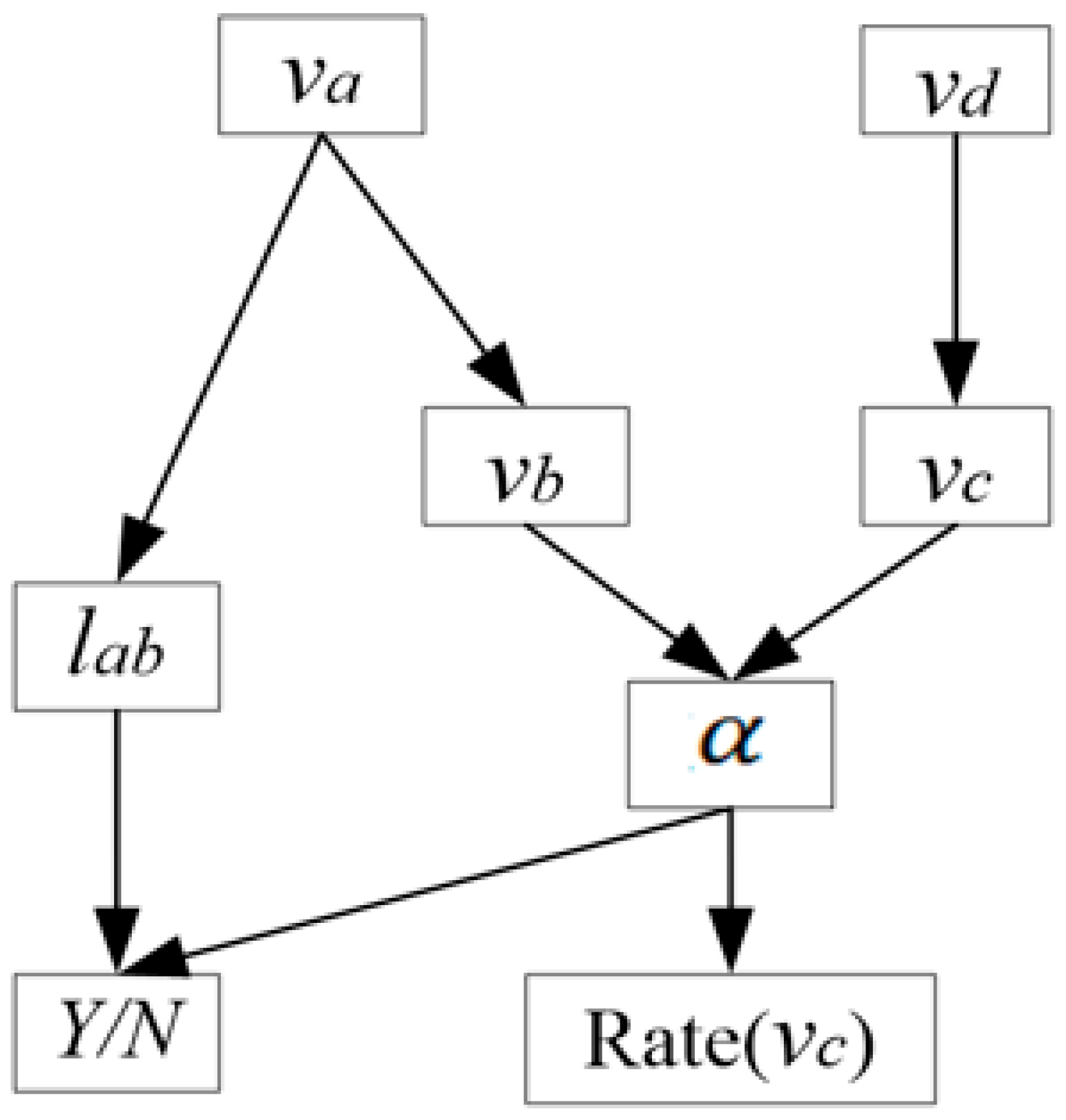
2.2. Bayesian Network Lane-Changing Model Construction
3. Test Based on the Asia Network Model
4. Results
5. Discussion
6. Conclusions
- Against the background of urban expressways with high load (0.8 ≤ V/C ≤ 0.9), a Bayesian network vehicle lane-changing model based on the I-CH scoring criterion MMHC algorithm was constructed to determine the posterior probabilities of various influencing factors. To verify the predictive accuracy of the lane-changing model, the standard Asia network model was introduced to test the lane-changing model.
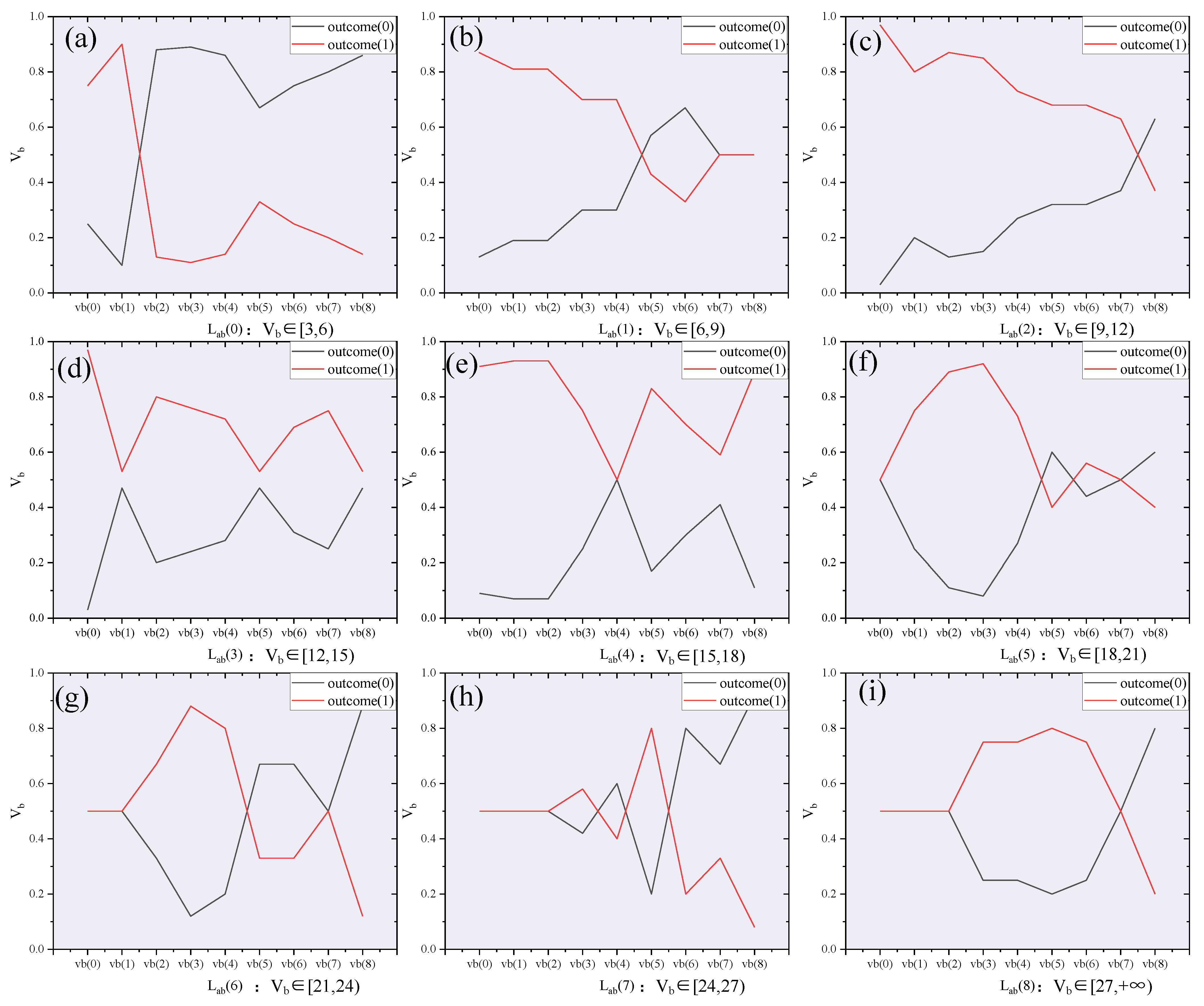
- On urban expressways with high load (0.8 ≤ V/C ≤ 0.9), it was found that when the spatial headway between the front and rear vehicles is less than 4.0 m, the vehicle lane-changing success rate is highest when the speed of the vehicle behind in the target lane is between 1.0 and 3.0 m/s; when the spatial headway between the front and rear vehicles is greater than 4.0 m, the vehicle lane-changing success rate is highest when the speed of the vehicle behind in the target lane is between 3.0 and 6.0 m/s.
- For the problem of vehicle lane-changing on high-load urban expressways (with a volume–capacity ratio of 0.8 ≤ V/C ≤ 0.9), the improved Bayesian network model captures the behavioral patterns reflecting drivers’ decisions under varying traffic conditions. Meanwhile, the probability of this model identifying lane-changing vehicles is 80.5%, which is considered to have a certain degree of reliability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, X.M.; Ren, F.T.; Duan, H.L. Research on Difinition and Estimation of Traffic Conflict at Intersections. J. Beijing Polytech. Univ. 1997, 14, 29–34. [Google Scholar]
- Hyden, C. A Traffic conflicts technique for examining urban intersection problems. In Proceedings of the First Workshop on Traffic Conflicts, Oslo, Norway, 26–27 September 1977. [Google Scholar]
- Ng, K.S.; Hung, W.T.; Wong, W.G. An Algorithm for Assessing the risk of Traffic Accident. J. Saf. Res. 2002, 33, 387–410. [Google Scholar] [CrossRef]
- Chang, L.Y.; Wang, H.W. Analysis of traffic injury severity: An application of non-parametric classification tree techniques. Accid. Anal. Prev. 2006, 38, 1019–1027. [Google Scholar] [CrossRef]
- Xu, C.; Liu, P.; Wang, W.; Li, Z. Evaluation of the impacts of traffic states on crash risks on freeways. Accid. Anal. Prev. 2012, 47, 162–171. [Google Scholar] [CrossRef]
- Huang, H.; Peng, Y.; Wang, J.; Luo, Q.; Li, X. Interactive risk analysis on crash injury severity at a mountainous freeway with tunnel groups in China. Accid. Anal. Prev. 2018, 111, 56–62. [Google Scholar] [CrossRef]
- Mikulec, R.; Semela, M.; Bradáč, A.; Tokař, S.; Bilík, M.; Křižák, M.; Belák, M.; Kledus, R.; Haring, A.; Rábek, V. Obsolete or Viable? Revision of Lane-Change Manoeuvre Duration Empirical Calculation. Energies 2021, 14, 8439. [Google Scholar] [CrossRef]
- Glaser, S.; Vanholme, B.; Mammar, S.; Gruyer, D.; Nouveliere, L. Maneuver-Based Trajectory Planning for Highly Autonomous Vehicles on Real Road with Traffic and Driver Interaction. IEEE Trans. Intell. Transp. Syst. 2010, 11, 589–606. [Google Scholar] [CrossRef]
- Kim, J.; Kum, D. Collision Risk Assessment Algorithm via Lane-Based Probabilistic Motion Prediction of Surrounding Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 19, 2965–2976. [Google Scholar] [CrossRef]
- Bosnak, M.; Skrjanc, I. Efficient Time-To-Collision Estimation for a Braking Supervision System with LIDAR. In Proceedings of the 2017 IEEE International Conference on Cybernetics, Exeter, UK, 21–23 June 2017; pp. 1–6. [Google Scholar]
- Noh, S. Decision-Making Framework for Autonomous Driving at Road Intersections: Safeguarding Against Collision, Overly Conservative Behavior, and Violation Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 3275–3286. [Google Scholar] [CrossRef]
- Shin, D.; Kim, B.; Yi, K.; Carvalho, A.; Borrelli, F. Human-Centered Risk Assessment of an Automated Vehicle Using Vehicular Wireless Communication. IEEE Trans. Intell. Transp. Syst. 2019, 20, 667–681. [Google Scholar] [CrossRef]
- Li, G.; Li, S.; Li, S.; Qin, Y.; Cao, D.; Qu, X.; Cheng, B. Deep reinforcement learning enabled decision-making for autonomous driving at intersections. Automot. Innov. 2020, 3, 374–385. [Google Scholar] [CrossRef]
- Xu, H.; Gao, Y.; Yu, F.; Darrell, T. End-to-End Learning of Driving Models from Large-Scale Video Datasets. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 3530–3538. [Google Scholar]
- Li, P.; Shi, J.; Liu, X. Cooperative and competitive lane-changing behavior characteristics of urban expressways. J. Highw. Transp. Res. Dev. 2017, 11, 69–77. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, H.; Li, Y.; Lee, J.; Long, K.; Gu, R.; Zhai, X. Modeling accident risks in different lane-changing behavioral patterns. Anal. Methods Accid. Res. 2021, 30, 100159. [Google Scholar] [CrossRef]
- Shangguan, Q.; Fu, T.; Wang, J.; Fu, L. A proactive lane-changing risk prediction framework considering driving intention recognition and different lane-changing patterns. Accid. Anal. Prev. 2022, 164, 106500. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Shi, X.; Wong, Y.D. A lane-changing risk profile analysis method based on time-series clustering. Phys. A Stat. Mech. Its Appl. 2021, 565, 125567. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Y.; Gu, X.; Sze, N.N.; Huang, J. A proactive crash risk prediction framework for lane-changing behavior incorporating individual driving styles. Accid. Anal. Prev. 2023, 188, 107072. [Google Scholar] [CrossRef]
- Sheikh, M.S.; Peng, Y. Modeling collision risk for unsafe lane-changing behavior: A lane-changing risk index approach. Alex. Eng. J. 2024, 88, 164–181. [Google Scholar] [CrossRef]
- Chen, S.; Piao, L.; Zang, X.; Luo, Q.; Li, J.; Yang, J.; Rong, J. Analyzing differences of highway lane-changing behavior using vehicle trajectory data. Phys. A Stat. Mech. Its Appl. 2023, 624, 128980. [Google Scholar] [CrossRef]
- Tan, H.; Lu, G.; Wang, Z.; Hua, J.; Liu, M. A unified risk field-based driving behavior model for car-following and lane-changing behaviors simulation. Simul. Model. Pract. Theory 2024, 136, 102991. [Google Scholar] [CrossRef]
- Zheng, L.; Liu, W. A Comprehensive Investigation of Lane-Changing Risk Recognition Framework of Multi-Vehicle Type Considering Key Features Based on Vehicles’ Trajectory Data. Electronics 2024, 13, 1097. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, J.; Zhao, C.; Li, M. Traffic risk assessment of lane-changing process in urban inter-tunnel weaving segment. Transp. Res. Rec. 2023, 2677, 95–106. [Google Scholar] [CrossRef]
- Du, H.; Sun, Y.; Pan, Y.; Li, Z.; Siarry, P. A lane-changing trajectory re-planning method considering conflicting traffic scenarios. Eng. Appl. Artif. Intell. 2024, 127, 107264. [Google Scholar] [CrossRef]
- Hu, X.; Zhou, J.; Yang, Y.; Chen, Q.; Zhang, L. Assessing the collision risk of mixed lane-changing traffic in the urban inter-tunnel weaving section using extreme value theory. Accid. Anal. Prev. 2024, 200, 107558. [Google Scholar] [CrossRef] [PubMed]
- Wen, X.; Huang, C.; Jian, S.; He, D. Analysis of discretionary lane-changing behaviors of autonomous vehicles based on real-world data. Transp. A Transp. Sci. 2023, 1–24. [Google Scholar] [CrossRef]
- Xiong, X.; He, Y.; Cai, Y.; Liu, Q.; Wang, H.; Chen, L. A Lane-Changing Trajectory Planning Algorithm Based on Lane-Change Impact Prediction. IEEE Trans. Intell. Veh. 2024, 9, 7912–7930. [Google Scholar] [CrossRef]
- Qu, D.; Dai, S.; Li, A.; Chen, Y.; Wei, C. Characteristic Analysis and Decision Model of Lane-Changing Game for Intelligent Connected Vehicles. Appl. Sci. 2023, 13, 8321. [Google Scholar] [CrossRef]
- Du, X.; Zhao, W. Risky lane-changing behavior recognition based on stacking ensemble learning on snowy and icy surfaces. Sci. Rep. 2024, 14, 19257. [Google Scholar] [CrossRef]
- Li, G.; Shi, W. Research on lane-changing decision and control of autonomous vehicles based on game theory. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024, 239, 1566–1576. [Google Scholar] [CrossRef]
- Xu, H.; Feng, S.; Zhang, Y.; Li, L. A grouping-based cooperative driving strategy for CAVs merging problems. IEEE Trans. Veh. Technol. 2019, 68, 6125–6136. [Google Scholar] [CrossRef]
- Wang, S.F.; Sun, W.S.; Liu, Z.F. Analysis of Lateral Acceleration During Stable Lane Changing of Vehicles. Mach. Des. Manuf. 2020, 7, 17–24. [Google Scholar]
- He, Y.; Feng, J.; Wei, K.; Cao, J.; Chen, S.; Wan, Y. Modeling and simulation of lane-changing and collision avoiding autonomous vehicles on superhighways. Phys. A Stat. Mech. Appl. 2023, 609, 128328. [Google Scholar] [CrossRef]
- Li, P.; Yang, Q.; Lu, W.; Xi, S.; Wang, H. An Improved Machine Learning Framework Considering Spatiotemporal Heterogeneity for Analyzing the Relationship Between Subway Station-Level Passenger Flow Resilience and Land Use-Related Built Environment. Land 2024, 13, 1887. [Google Scholar] [CrossRef]
- Childress, S.; Nichols, B.; Charlton, B.; Coe, S. Using an activity-based model to explore the potential impacts of automated vehicles. Transp. Res. Rec. 2015, 2493, 99–106. [Google Scholar] [CrossRef]
- Nsw-Transport. Centre for Road Safety. Transport for New South Wales, Australia. 2018. Available online: https://roadsafety.transport.nsw.gov.au/statistics/interactivecrashstats/nsw.html?tabnsw=3 (accessed on 3 May 2024).
- Peng, J.S.; Fu, R.; Shi, L.L.; Zhang, Q. Research of driver’s lane change decision-making mechanism. Wuhan Ligong Daxue Xuebao J. Wuhan Univ. Technol. 2011, 33, 46–50. [Google Scholar]
- Li, P.; Chen, X.; Lu, W.; Wang, H.; Wang, Y. Nonlinear effects of the built environment on subways at station level: Average travel distance changes under the influence of COVID-19. J. Urban Plan. Dev. 2025, 151, 04024070. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Outcome | |||||
|---|---|---|---|---|---|---|
| 1 | 4 | 4 | 4 | 3 | 1 | 1 |
| 2 | 4 | 4 | 3 | 3 | 3 | 1 |
| 3 | 4 | 4 | 3 | 3 | 3 | 1 |
| … | … | … | … | … | … | … |
| 784 | 8 | 8 | 8 | 8 | 0 | 0 |
| 0.143 | 0.136 | 0.045 | 0.048 | 0.034 | 0.039 | 0.011 | 0.016 | 0.078 | |
| 0.296 | 0.379 | 0.291 | 0.135 | 0.108 | 0.094 | 0.044 | 0.031 | 0.098 | |
| 0.265 | 0.212 | 0.367 | 0.304 | 0.148 | 0.125 | 0.066 | 0.047 | 0.078 | |
| 0.194 | 0.136 | 0.206 | 0.304 | 0.345 | 0.281 | 0.099 | 0.047 | 0.118 | |
| 0.041 | 0.015 | 0.045 | 0.145 | 0.251 | 0.242 | 0.143 | 0.047 | 0.098 | |
| 0.031 | 0.015 | 0.01 | 0.029 | 0.074 | 0.07 | 0.286 | 0.156 | 0.137 | |
| 0.01 | 0.045 | 0.02 | 0.01 | 0.015 | 0.063 | 0.187 | 0.281 | 0.137 | |
| 0.01 | 0.03 | 0.005 | 0.005 | 0.01 | 0.07 | 0.077 | 0.266 | 0.059 | |
| 0.01 | 0.03 | 0.01 | 0.019 | 0.015 | 0.016 | 0.088 | 0.109 | 0.196 |
| Model | Actual Lane-Change Data | Vehicle Lane-Change Prediction Results | Relative Error |
|---|---|---|---|
| Bayesian Network Model | 200 successful 94 failed | 239 successful 55 failed | 19.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Li, P.; Yang, F.; Lu, W. Lane-Changing Risk Prediction on Urban Expressways: A Mixed Bayesian Approach for Sustainable Traffic Management. Sustainability 2025, 17, 7061. https://doi.org/10.3390/su17157061
Yang Q, Li P, Yang F, Lu W. Lane-Changing Risk Prediction on Urban Expressways: A Mixed Bayesian Approach for Sustainable Traffic Management. Sustainability. 2025; 17(15):7061. https://doi.org/10.3390/su17157061
Chicago/Turabian StyleYang, Quantao, Peikun Li, Fei Yang, and Wenbo Lu. 2025. "Lane-Changing Risk Prediction on Urban Expressways: A Mixed Bayesian Approach for Sustainable Traffic Management" Sustainability 17, no. 15: 7061. https://doi.org/10.3390/su17157061
APA StyleYang, Q., Li, P., Yang, F., & Lu, W. (2025). Lane-Changing Risk Prediction on Urban Expressways: A Mixed Bayesian Approach for Sustainable Traffic Management. Sustainability, 17(15), 7061. https://doi.org/10.3390/su17157061