
AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation

 , , , , , ,
, , , , , , 
Abstract
1. Introduction
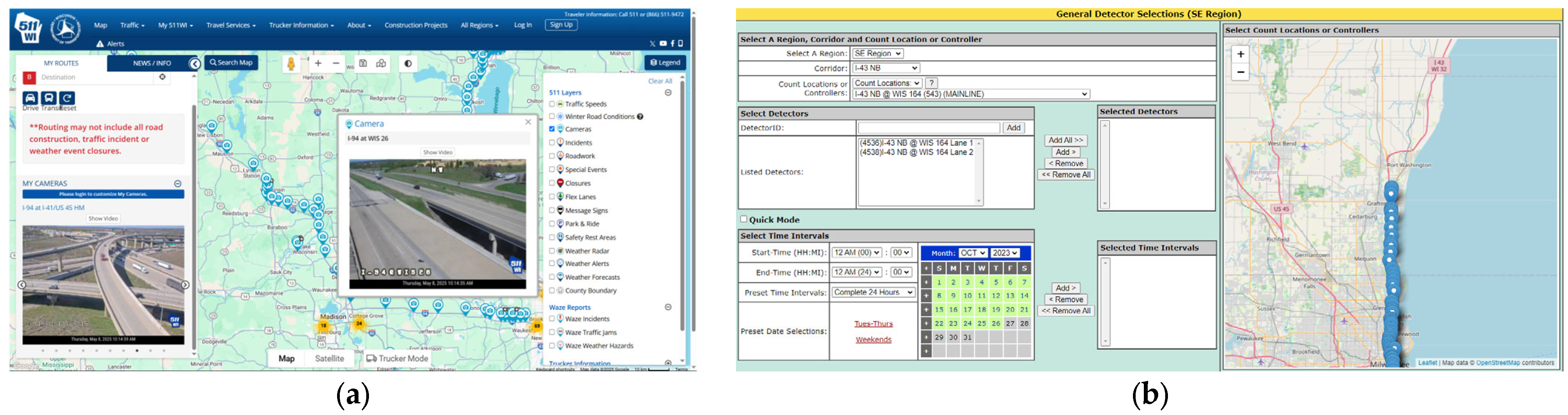
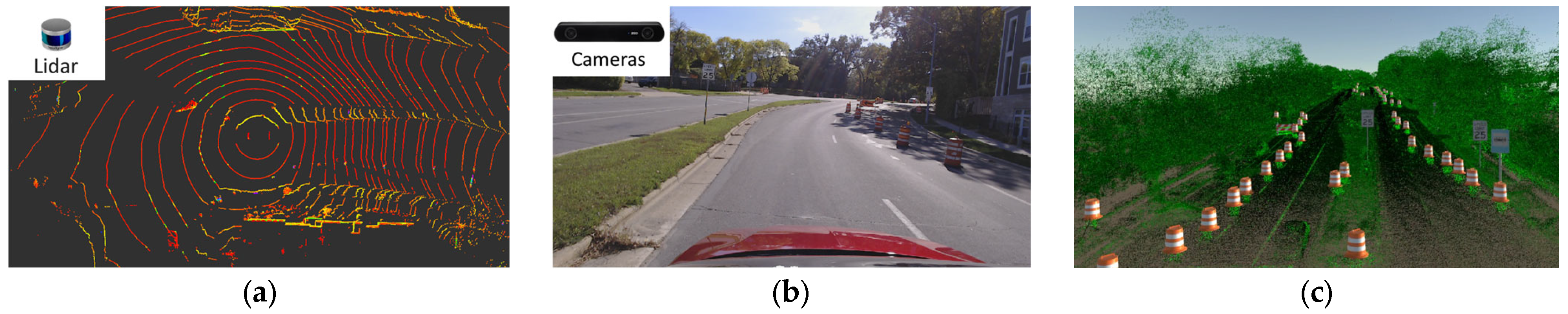
- Integration with existing ATMS platforms. The proposed DT framework ingests heterogeneous data inputs (camera, Lidar, telematics, etc) and directly hooks into WisDOT 511 and WisTransPortal live streams.
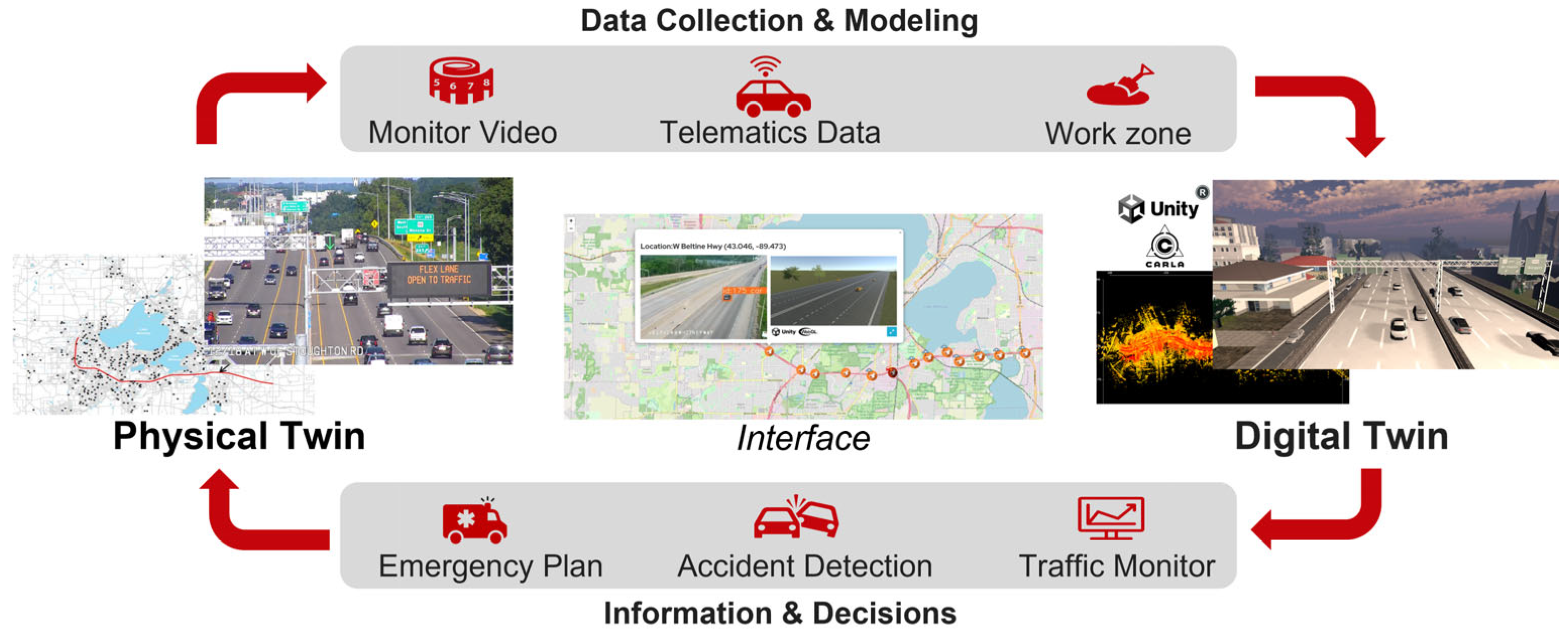
- Real-world implementation. Complete DT pipeline is deployed on Madison’s Beltline Flex Lane corridor, where it mirrors field conditions, reconstructs incidents, and drives edge–cloud AI models for traffic monitoring and predictive analytics.
- Exploration of future applications such as eco-driving, where the DT platform could support optimized vehicle control.
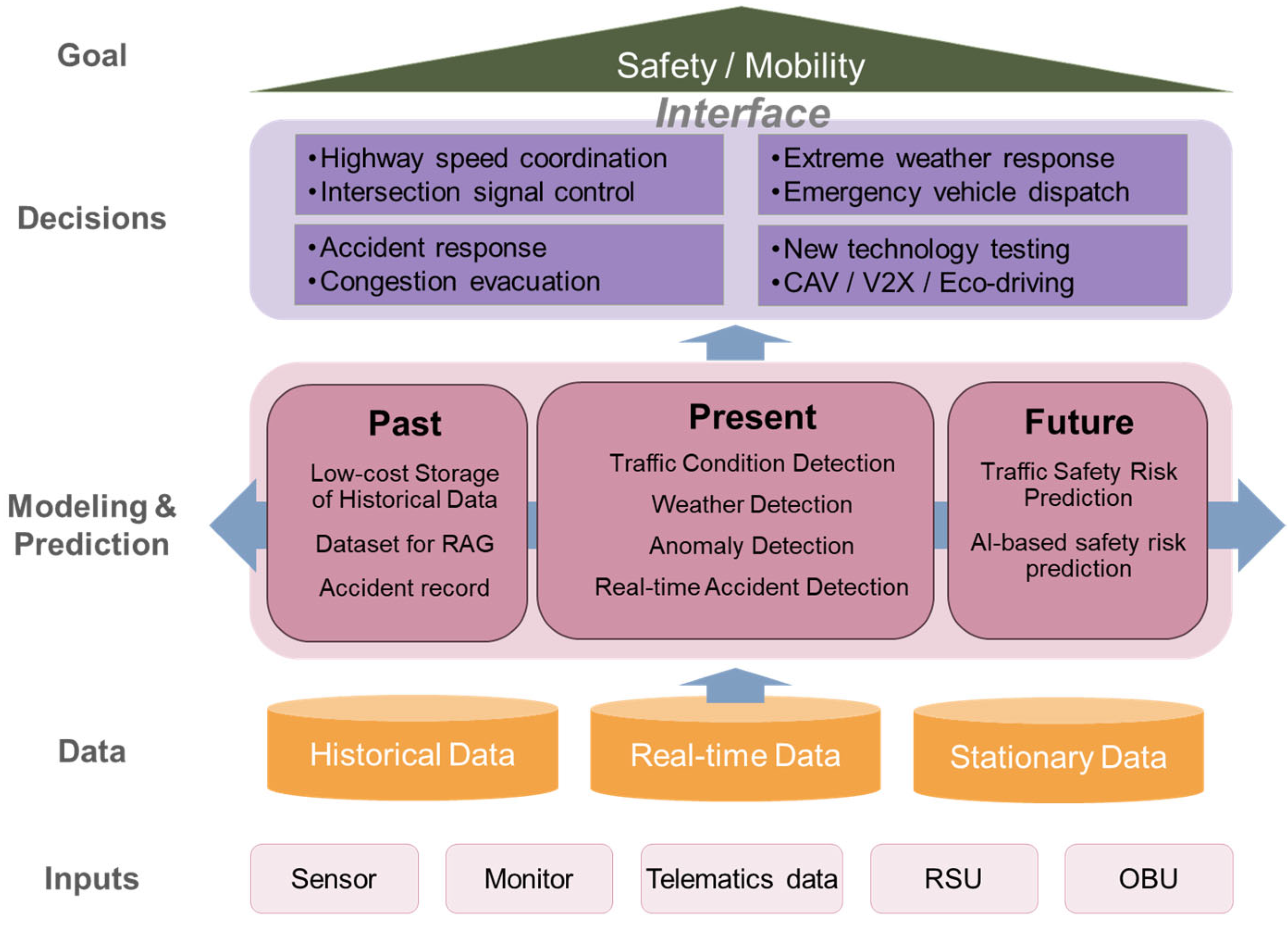
2. Digital Twin System Overview
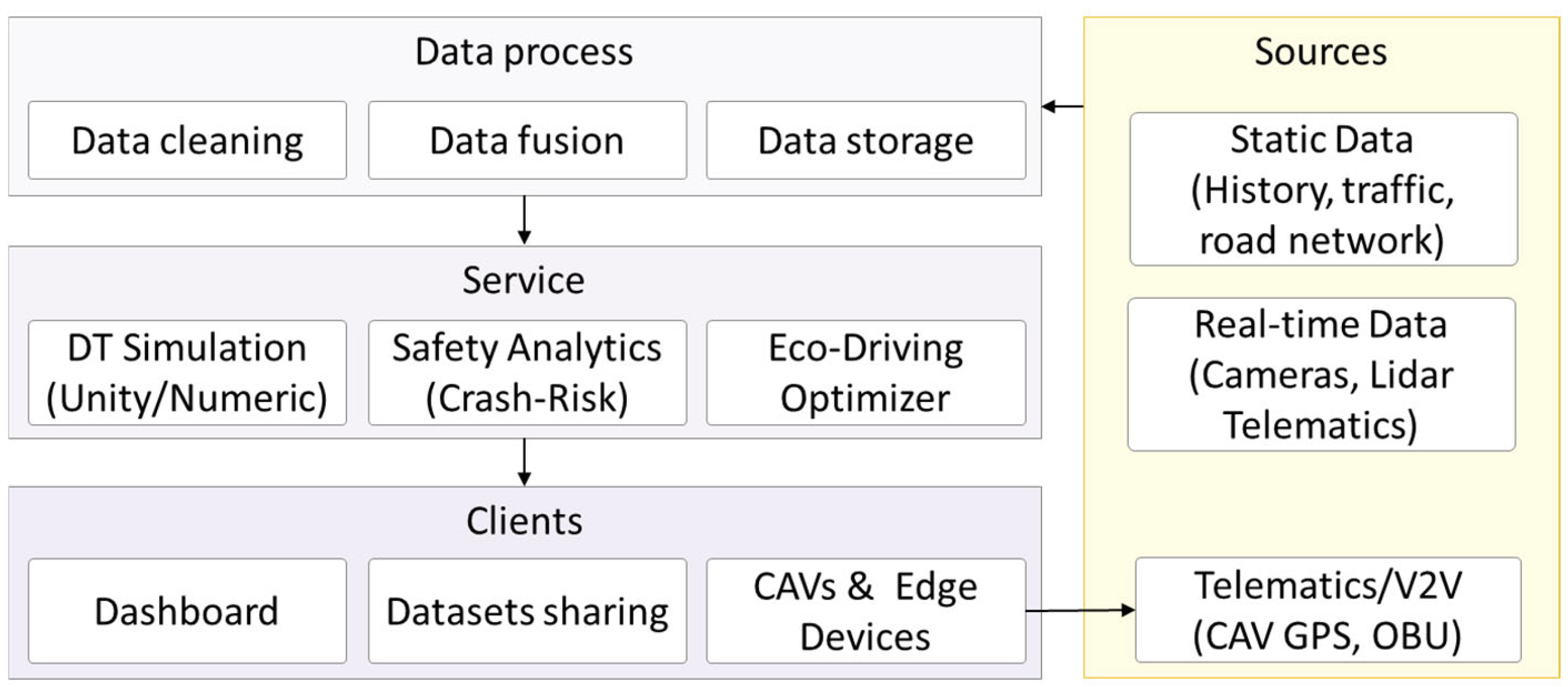
3. Platform Architecture
3.1. Data Layer
3.1.1. Static Data
3.1.2. Real-Time Data
3.1.3. Data Fusion and Processing
3.2. Function Layer
3.2.1. DT Core and Simulation Engine
3.2.2. Prediction and Analysis Module
3.2.3. Decision-Making Module
3.3. Interface Layer
3.3.1. API Development and System Integration
3.3.2. User Interface and Decision Support
4. Case Study: Flex Lane Deployment
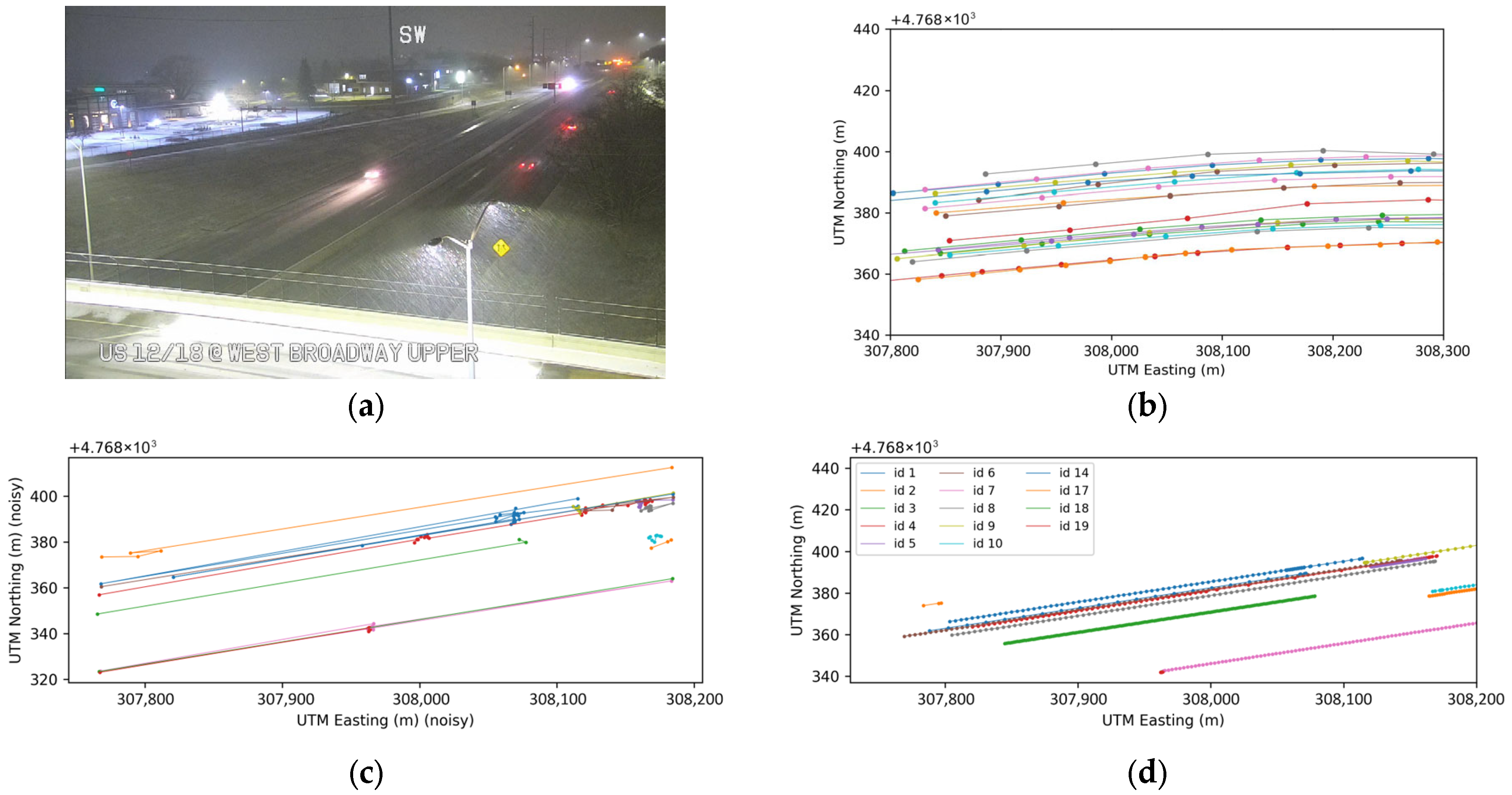
4.1. Data Processing
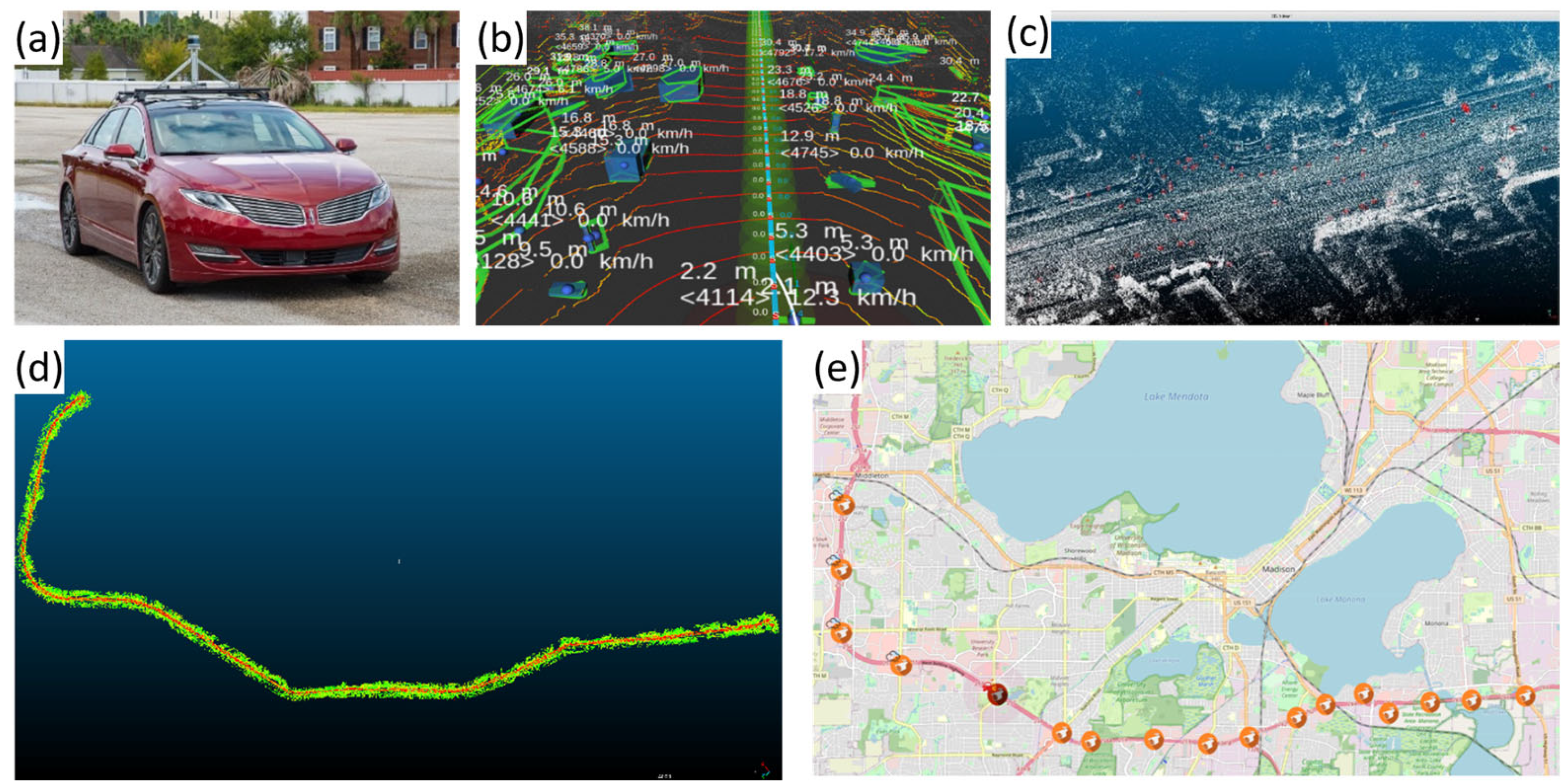
4.2. Digital Twinning
4.3. Decision Making
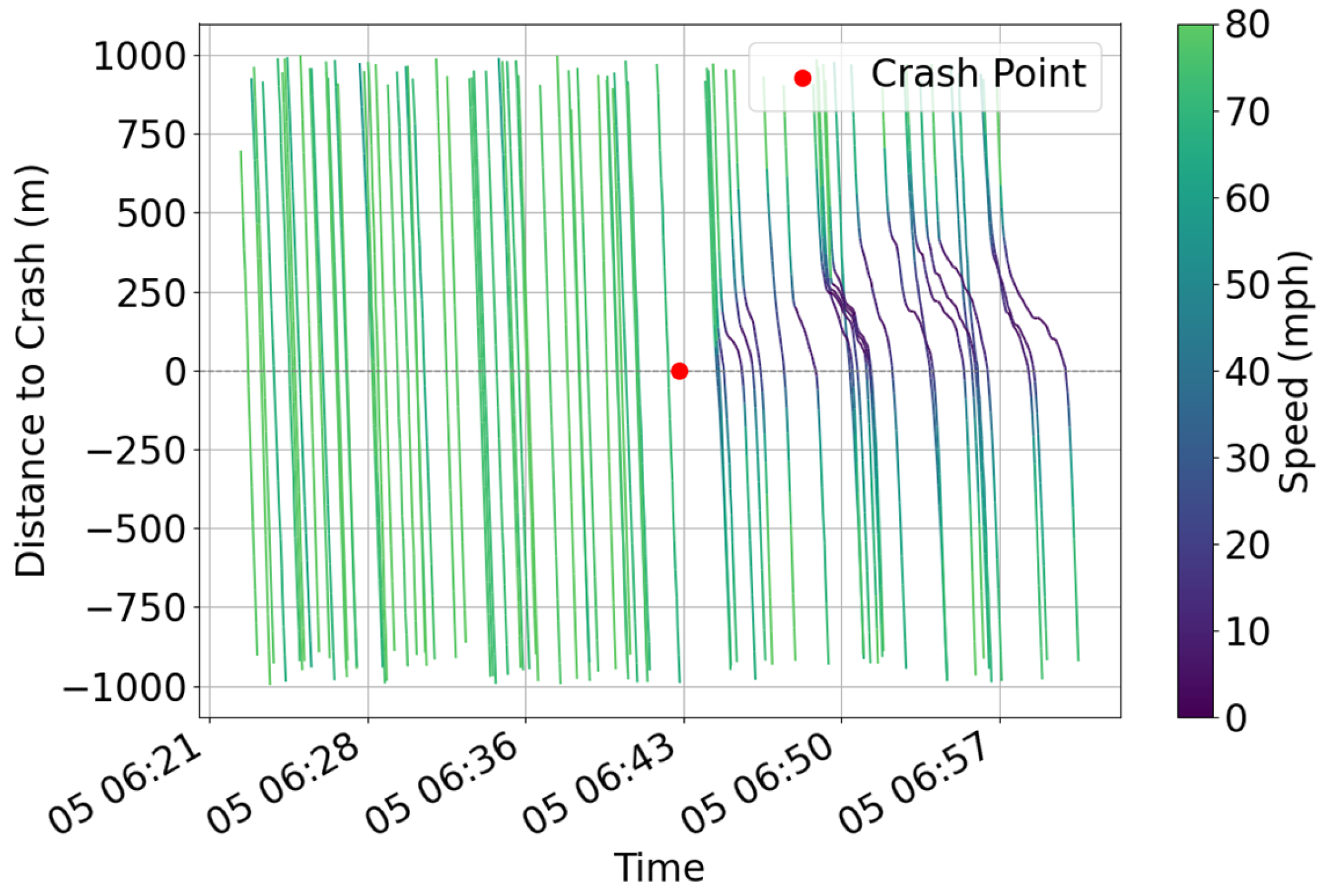
4.4. Application Case 1: Crash Monitoring and Handling
4.5. Application Case 2: Eco-Driving
5. Conclusions and Future Challenges
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nezamuddin, N.; Jiang, N.; Ma, J.; Zhang, T.; Waller, S.T. Active Traffic Management Strategies: Implications for Freeway Operations and Traffic Safety. 2011. Available online: https://trid.trb.org/View/1092841 (accessed on 16 February 2025).
- De Souza, A.M.; Brennand, C.A.; Yokoyama, R.S.; Donato, E.A.; Madeira, E.R.; Villas, L.A. Traffic Management Systems: A Classification, Review, Challenges, and Future Perspectives. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147716683612. [Google Scholar] [CrossRef]
- Soleimaniamiri, S.; Li, X.S.; Yao, H.; Ghiasi, A.; Vadakpat, G.; Bujanovic, P.; Lochrane, T.; Stark, J.; Racha, S.; Hale, D. FHWA Cooperative Automation Research: CARMA Proof-of-Concept Transportation System Management and Operations Use Case 3–Traffic Signal Optimization with CDA at Signalized Intersections; United States Federal Highway Administration: Washington, DC, USA, 2022. Available online: https://rosap.ntl.bts.gov/view/dot/61035 (accessed on 16 February 2025).
- Djahel, S.; Doolan, R.; Muntean, G.-M.; Murphy, J. A Communications-Oriented Perspective on Traffic Management Systems for Smart Cities: Challenges and Innovative Approaches. IEEE Commun. Surv. Tutor. 2015, 17, 125–151. [Google Scholar] [CrossRef]
- Hussain, O.; Ghiasi, A.; Li, X.; Qian, Z. Freeway Lane Management Approach In Mixed Traffic Environment with Connected Autonomous Vehicles. arXiv 2016, arXiv:1609.02946. [Google Scholar]
- Wang, L.; Abdel-Aty, M.; Lee, J. Implementation of Active Traffic Management Strategies for Safety on Congested Expressway Weaving Segments. Transp. Res. Rec. 2017, 2635, 28–35. [Google Scholar] [CrossRef]
- Ersan, M.; Irmak, E.; Colak, A.M. Applications, Insights and Implications of Digital Twins in Smart City Management. In Proceedings of the 2024 12th International Conference on Smart Grid (icSmartGrid), Setubal, Portugal, 27–29 May 2024; pp. 378–383. [Google Scholar]
- Aloupogianni, E.; Doctor, F.; Karyotis, C.; Maniak, T.; Tang, R.; Iqbal, R. An AI-Based Digital Twin Framework for Intelligent Traffic Management in Singapore. In Proceedings of the 2024 International Conference on Electrical, Computer and Energy Technologies, Sydney, Australia, 25–27 July 2024; pp. 1–6. [Google Scholar]
- Gao, Y.; Qian, S.; Li, Z.; Wang, P.; Wang, F.; He, Q. Digital Twin and Its Application in Transportation Infrastructure. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July–15 August 2021; pp. 298–301. [Google Scholar]
- Glaessgen, E.; Stargel, D. The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles. In 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference; American Institute of Aeronautics and Astronautics: Honolulu, HI, USA, 2012. [Google Scholar]
- Tao, F.; Qi, Q.; Wang, L.; Nee, A.Y.C. Digital Twins and Cyber–Physical Systems toward Smart Manufacturing and Industry 4.0: Correlation and Comparison. Engineering 2019, 5, 653–661. [Google Scholar] [CrossRef]
- Kušić, K.; Schumann, R.; Ivanjko, E. A Digital Twin in Transportation: Real-Time Synergy of Traffic Data Streams and Simulation for Virtualizing Motorway Dynamics. Adv. Eng. Inform. 2023, 55, 101858. [Google Scholar] [CrossRef]
- Hu, C.; Fan, W.; Zeng, E.; Hang, Z.; Wang, F.; Qi, L.; Bhuiyan, M.Z.A. Digital Twin-Assisted Real-Time Traffic Data Prediction Method for 5G-Enabled Internet of Vehicles. IEEE Trans. Ind. Inform. 2022, 18, 2811–2819. [Google Scholar] [CrossRef]
- Chang, X.; Zhang, R.; Mao, J.; Fu, Y. Digital Twins in Transportation Infrastructure: An Investigation of the Key Enabling Technologies, Applications, and Challenges. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6449–6471. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, W. Traffic Flow Digital Twin Generation for Highway Scenario Based on Radar-Camera Paired Fusion. Sci. Rep. 2023, 13, 642. [Google Scholar] [CrossRef]
- Irfan, M.S.; Dasgupta, S.; Rahman, M. Toward Transportation Digital Twin Systems for Traffic Safety and Mobility: A Review. IEEE Internet Things J. 2024, 11, 24581–24603. [Google Scholar] [CrossRef]
- Fang, J.; Yan, D.; Qiao, J.; Xue, J.; Yu, H. DADA: Driver Attention Prediction in Driving Accident Scenarios. IEEE Trans-Actions Intell. Transp. Syst. 2022, 23, 4959–4971. [Google Scholar] [CrossRef]
- Hu, J.; Wang, S.; Zhang, Y.; Wang, H.; Liu, Z.; Cao, G. Safety-aware human-lead vehicle platooning by proactively re-acting to uncertain human behaving. Transp. Res. Part C: Emerg. Technol. 2025, 170, 104941. [Google Scholar] [CrossRef]
- Ma, C.; Li, X.; Ma, K.; Zhang, P.; Long, K.; Chen, S. Trajectory-Based Performance Ranking System of Low-Level Auto-mated Vehicles. In Proceedings of the in 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bizkaia, Spain, 24–28 September 2023; pp. 5649–5654. [Google Scholar] [CrossRef]
- Alexiadis, V. Integrated Corridor Management in the U.S.—Analysis, Modeling and Simulation. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 218–223. [Google Scholar] [CrossRef]
- Dasgupta, S.; Rahman, M.; Lidbe, A.D.; Lu, W.; Jones, S. A Transportation Digital-Twin Approach for Adaptive Traffic Control Systems. arXiv 2023, arXiv:2109.10863. [Google Scholar] [CrossRef]
- Taylor, J.; Culligan, P.; Derrible, S.; Jain, R.; Lam, D. Smart City Digital Twin Convergence Workshop. 2019. Available online: https://www.researchgate.net/profile/Patricia-Culligan/publication/374951291_Smart_City_Digital_Twin_Convergence_Work-shop_FINAL_REPORT/links/6539440124bbe32d9a6f0402/Smart-City-Digital-Twin-Convergence-Workshop-FINAL-REPORT.pdf (accessed on 16 February 2025).
- Botín-Sanabria, D.M.; Mihaita, A.-S.; Peimbert-García, R.E.; Ramírez-Moreno, M.A.; Ramírez-Mendoza, R.A.; Lozoya-Santos, J. de J. Digital Twin Technology Challenges and Applications: A Comprehensive Review. Remote Sens. 2022, 14, 1335. [Google Scholar] [CrossRef]
- Alcaraz, C.; Lopez, J. Digital Twin: A Comprehensive Survey of Security Threats. IEEE Commun. Surv. Tutor. 2022, 24, 1475–1503. [Google Scholar] [CrossRef]
- Aljohani, T.; Almutairi, A. A Comprehensive Survey of Cyberattacks on EVs: Research Domains, Attacks, Defensive Mechanisms, and Verification Methods. Def. Technol. 2024, 42, 31–58. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, R.; Hu, H.; Liu, D.; Yan, Z. Cyberattacks on Connected Automated Vehicles: A Traffic Impact Analysis. IET Intell. Transp. Syst. 2023, 17, 295–311. [Google Scholar] [CrossRef]
- Lai, J.; Hu, J.; Cui, L.; Chen, Z.; Yang, X. A generic simulation platform for cooperative adaptive cruise control under partially connected and automated environment. Transp. Res. Part C: Emerg. Technol. 2020, 121, 102874. [Google Scholar] [CrossRef]
- Jabeen Siddiqi, S.; Alobaidi, A.H.; Ahmad Jan, M.; Tariq, M. Securing Vehicle-to-Digital Twin Communications in the Internet of Vehicles. ACM Trans. Multimed. Comput. Commun. Appl. 2025. [Google Scholar] [CrossRef]
- Grasselli, C.; Melis, A.; Girau, R.; Callegati, F. A Digital Twin for Enhanced Cybersecurity in Connected Vehicles. In Proceedings of the 2023 23rd International Conference on Transparent Optical Networks (ICTON), Bucharest, Romania, 2–6 July 2023; pp. 1–4. [Google Scholar]
- 511WI. Available online: https://511wi.gov/511wi.gov (accessed on 16 February 2025).
- Xu, Z.; Wei, T.; Easa, S.; Zhao, X.; Qu, X. Modeling Relationship between Truck Fuel Consumption and Driving Behav-ior Using Data from Internet of Vehicles. Comput. Aided Civ. Eng. 2018, 33, 209–219. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.-P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic Traffic Simulation Using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]
- Technologies, U. Unity-Manual: Unity User Manual 2022.2. Available online: https://docs.unity3d.com/2022.2/Documentation/Manual/UnityManual.html (accessed on 14 April 2025).
- The WisTransPortal System. Available online: https://transportal.cee.wisc.edu/applications/vspoc.html (accessed on 22 February 2025).
- Jocher, G.; Chaurasia, A.; Qiu, J. Ultralytics YOLO. 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 16 February 2025).
- Wojke, N.; Bewley, A.; Paulus, D. Simple Online and Realtime Tracking with a Deep Association Metric. arXiv 2017, arXiv:1703.07402. [Google Scholar] [CrossRef]
- Li, J.; Xu, R.; Ma, J.; Zou, Q.; Ma, J.; Yu, H. Domain adaptive object detection for autonomous driving under foggy weather. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision; 2023; pp. 612–622. Available online: https://openaccess.thecvf.com/content/WACV2023/html/Li_Domain_Adaptive_Object_Detection_for_Autonomous_Driving_Under_Foggy_Weather_WACV_2023_paper.html (accessed on 6 May 2025).
- Li, B.; Liu, P.; Fu, L.; Li, J.; Fang, J.; Xu, Z.; Yu, H. Enhancing Vehicle Re-identification by Pair-flexible Pose Guided Vehicle Image Synthesis. Green Energy Intell. Transp. 2025, 100269. [Google Scholar] [CrossRef]
- Long, K.; Liang, Z.; Shi, H.; Shi, L.; Chen, S.; Li, X. Traffic Oscillation Mitigation with Physics-Enhanced Residual Learning (PERL)-Based Predictive Control. Commun. Transp. Res. 2024, 4, 100154. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | CARLA | SUMO | Unity |
|---|---|---|---|
| Primary Focus | High-fidelity autonomous-vehicle research and development | Macro-/micro-scale traffic flow modeling and policy evaluation | General-purpose 3D engine used to build interactive elements |
| Agent Diversity | Typical traffic participants: vehicles, pedestrians, cyclists, static obstacles, etc. | Vehicles and pedestrians | Virtually unlimited (vehicles, robots, machinery, etc.) |
| Real-Time Interaction | Yes: real-time single-user interaction | No | Yes: real-time multi-user interaction |
| Visual Fidelity | Photorealistic UE 5 graphics; dynamic weather/lighting | 2D or minimalist 3D | Real-time rendering (HDRP/URP, VR/AR ready) |
| Sensor-Suite Simulation | Camera, LiDAR, Radar, GNSS, etc. | None built-in | Third-party or custom plug-ins |
| Data Integration and APIs | Python/C++ API, ROS 2 bridge, Digital-Twin Tool imports OSM and live map data | TraCI for stepwise control and telemetry streaming | Real-time IoT stream support (REST, WebSockets, etc.) |
| GIS/Map Import | One-click OSM, Unreal digital twin tool, and procedural meshing of real city blocks | Native OSM importer; supports SUMO-net-convert for custom shapefiles | GIS plug-ins or custom pipeline |
| Vehicle 0 | Vehicle 1 | Average of Two Vehicles | ||||
|---|---|---|---|---|---|---|
| Baseline | Proposed | Baseline | Proposed | Baseline | Proposed | |
| Fuel consumption (L/100 km) | 6.98 | 6.724 | 7.473 | 7.285 | 7.227 | 6.985 |
| Decrease (%) | −3.7% | −3.1% | −3.4% | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, K.; Ma, C.; Li, H.; Li, Z.; Huang, H.; Shi, H.; Huang, Z.; Sheng, Z.; Shi, L.; Li, P.; et al. AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation. Sustainability 2025, 17, 4391. https://doi.org/10.3390/su17104391
Long K, Ma C, Li H, Li Z, Huang H, Shi H, Huang Z, Sheng Z, Shi L, Li P, et al. AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation. Sustainability. 2025; 17(10):4391. https://doi.org/10.3390/su17104391
Chicago/Turabian StyleLong, Keke, Chengyuan Ma, Hangyu Li, Zheng Li, Heye Huang, Haotian Shi, Zilin Huang, Zihao Sheng, Lei Shi, Pei Li, and et al. 2025. "AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation" Sustainability 17, no. 10: 4391. https://doi.org/10.3390/su17104391
APA StyleLong, K., Ma, C., Li, H., Li, Z., Huang, H., Shi, H., Huang, Z., Sheng, Z., Shi, L., Li, P., Chen, S., & Li, X. (2025). AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation. Sustainability, 17(10), 4391. https://doi.org/10.3390/su17104391