

Will Customers’ Understanding of the Trolley Dilemma Hinder Their Adoption of Robotaxi?

Abstract
1. Introduction
1.1. Robotaxi
1.2. UTAUT
1.3. Trolley Dilemma
An AV is proposed to be driving with passengers on board and some pedestrians suddenly appear in its path with no time to brake and completely stop. It has to decide between staying the course and running over the pedestrians or swerve to the side and hit a barrier that kills the passengers[20]
2. Material and Methods
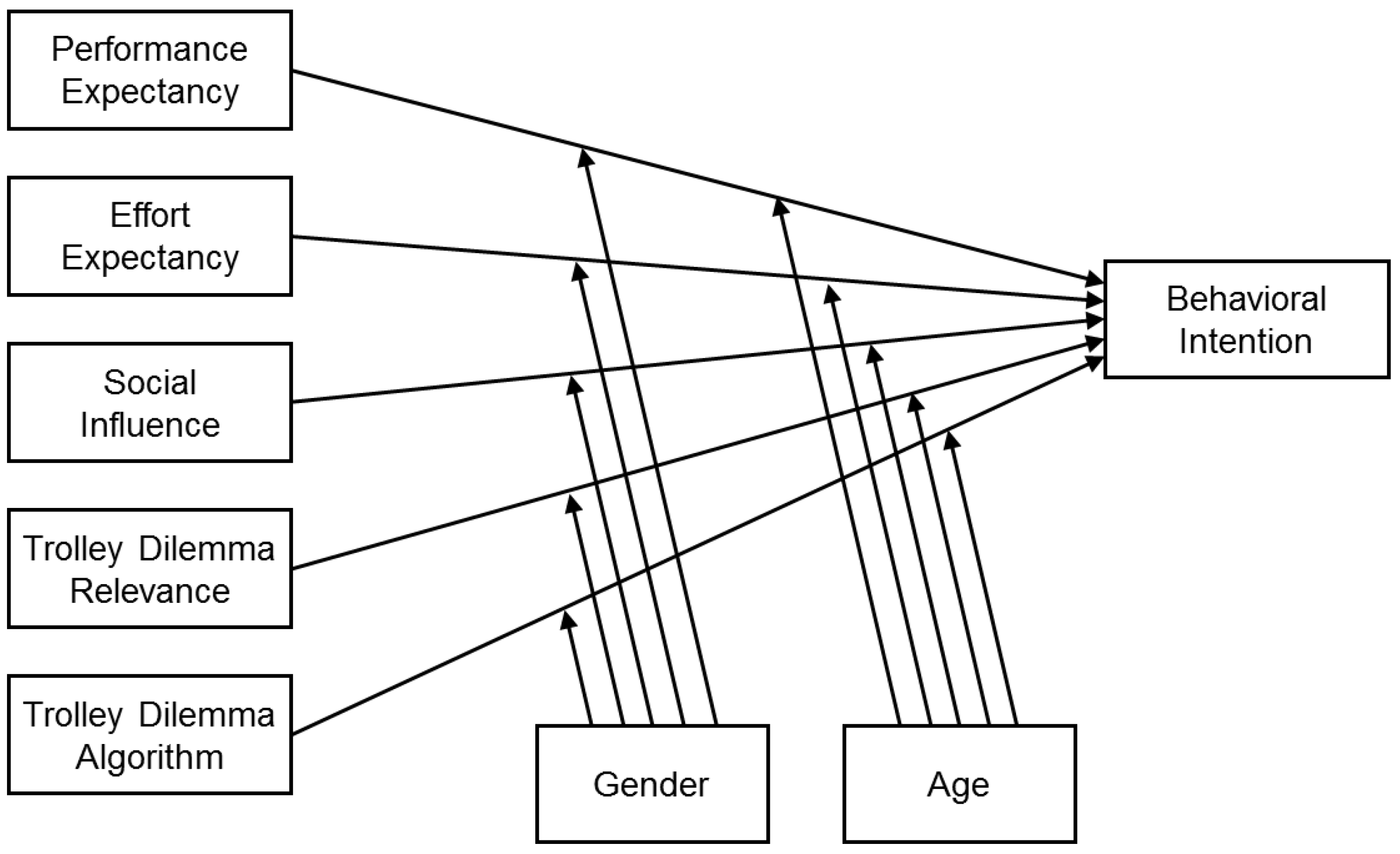
2.1. The UTAUT Model and Hypotheses
2.2. The Effect of Trolley Dilemma and Hypotheses
2.3. Method
3. Results
3.1. Basic Statistics
3.2. Multi-Linear Regression Results
(0.700) (0.096) (0.099) (0.138)
4. Discussion
4.1. The UTAUT Model
4.2. Trolley Dilemma Relevance
4.3. Trolley Dilemma Algorithm
4.4. What Can Robotaxi Companies Do?
5. Conclusions
5.1. Contributions
5.2. Limitations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Questionnaire
- A.
- Participants read the following statements. [Robotaxi introduction]
- B.
- Participants answer the following questions. [Validation questions]
- Is robotaxi being tested in several big cities in China?
- Yes.
- No.
- Riding a robotaxi is ____ riding a traditional taxi,
- significantly different from
- similar with
- In the future, there will be ____ on robotaxis.
- no backup human drivers
- backup human drivers
- Robotaxis ____.
- cannot provide a more private riding environment for the passengers
- can optimize travel route and vehicle control
- C.
- Participants answer the following questions. [PE, EE, SI]
- 5.
- Robotaxi will be useful to me.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 6.
- Robotaxi will shorten my travel time.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 7.
- Robotaxi will make travelling more convenient.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 8.
- Robotaxi will make me life and work better.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 9.
- The user interface of the App for robotaxi will be clear and understandable.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 10.
- It will be easy for me to use the App for robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 11.
- The user interface of the App for robotaxi will not be complicated.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 12.
- Learning to use the App for robotaxi will not be difficult.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 13.
- My colleagues will use robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 14.
- My family and friends will use robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 15.
- My company will support me for using robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 16.
- My family and friends will support me for using robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- D.
- Participants read the following statements. [Trolley dilemma]
- E.
- Participants answer the following questions. [Validation questions]
- 17.
- Trolley dilemma is one the most famous thought experiments in the ____.A. ethics fieldB. legal field
- 18.
- Trolley dilemma ____ happens in real life.A. oftenB. rarely
- 19.
- Research suggests robotaxis are ____ than taxis driven by human.A. less safeB. safer
- 20.
- Robotaxi has ____ probability of encountering accidents.A. an extremely smallB. zero
- F.
- Participants answer the following questions. [Trolley dilemma relevance, TD_REL]
- 21.
- Regarding robotaxi, it is meaningful to consider trolley dilemma.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 22.
- There is a strong connection between robotaxi and trolley dilemma.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 23.
- Robotaxi will not go to the market before it resolves the trolley dilemma issue.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 24.
- I would hesitate to use robotaxi before it resolves the trolley dilemma issue.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- G.
- Participants read the following statements. [Trolley dilemma algorithm, TD_ALG]
- H.
- Participants answer the following questions. [Validation questions]
- 25.
- Many robotaxi companies have agreed that when facing trolley dilemma, their algorithm will follow the rule of thumb of ____.A. minimizing overall sufferingB. passenger first
- 26.
- That means ____.A. in any case, it will always prioritize the safety of the passenger(s)B. in some cases, it will compromise the passenger(s) to save a significantly larger group of pedestrians
- I.
- Participants answer the following questions. [Behavioral intention, BI]
- 27.
- I will use robotaxi in the future.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 28.
- Robotaxi is worth be used.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
- 29.
- Once robotaxi is being officially deployed, I will download an App and call for a robotaxi.1-totally disagree 2 3 4-neutral 5 6 7-totally agree
Appendix B. Reliability and Validity

{kind=link}
{kind=link}
| Variables | Cronbach’s α | Number of Items |
|---|---|---|
| PE | 0.819 | 4 |
| EE | 0.834 | 4 |
| SI | 0.884 | 4 |
| TD_REL | 0.845 | 4 |
| BI | 0.940 | 3 |
| KMO | 0.850 | |
|---|---|---|
| Approx. Chi-Square | 3292.378 | |
| Bartlett test | DOF | 171 |
| p-value | 0.000 | |
References
- De Freitas, J.; Censi, A.; Smith, B.W.; Di Lillo, L.; Anthony, S.E.; Frazzoli, E. From driverless dilemmas to more practical commonsense tests for automated vehicles. Proc. Natl. Acad. Sci. USA 2021, 118, e2010202118. [Google Scholar] [CrossRef]
- Gogoll, J.; Müller, J.F. Autonomous cars: In favor of a mandatory ethics setting. Sci. Eng. Ethics 2017, 23, 681–700. [Google Scholar] [CrossRef]
- Merfeld, K.; Wilhelms, M.P.; Henkel, S.; Kreutzer, K. Carsharing with shared autonomous vehicles: Uncovering drivers, barriers and future developments—A four-stage Delphi study. Technol. Forecast. Soc. Chang. 2019, 144, 66–81. [Google Scholar] [CrossRef]
- Meurer, J.; Pakusch, C.; Stevens, G.; Randall, D.; Wulf, V. A Wizard of Oz study on passengers’ experiences of a robo-taxi service in real-life settings. In Proceedings of the DIS ‘20: 2020 ACM Designing Interactive Systems Conference, Eindhoven, The Netherlands, 6–10 July 2020; pp. 1365–1377. [Google Scholar]
- Bauer, K.; Hein, S.E. The effect of heterogeneous risk on the early adoption of Internet banking technologies. J. Bank. Financ. 2006, 30, 1713–1725. [Google Scholar] [CrossRef]
- Lavasani, M.; Jin, X.; Du, Y.M. Market penetration model for autonomous vehicles on the basis of earlier technology adoption experience. Transp. Res. Rec. 2016, 2597, 67–74. [Google Scholar] [CrossRef]
- Scorrano, M.; Rotaris, L. The role of environmental awareness and knowledge in the choice of a seated electric scooter. Transp. Res. Part A Policy Pract. 2022, 160, 333–347. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.; Davis, G.; Davis, F. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 7, 425–478. [Google Scholar] [CrossRef]
- Foot, P. The problem of abortion and the doctrine of the double effect. Oxf. Rev. 1967, 5, 5–15. [Google Scholar]
- Morita, T.; Managi, S. Autonomous vehicles: Willingness to pay and the social dilemma. Transp. Res. Part C Emerg. Technol. 2020, 119, 102748. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Washington, DC, USA, 2018. [Google Scholar]
- Liu, M.Y.; Wu, J.P.; Zhu, C.L.; Hu, K.Z. A study on public adoption of robo-taxis in China. J. Adv. Transp. 2020, 2020, 8877499. [Google Scholar] [CrossRef]
- Alawadhi, M.; Almazrouie, J.; Kamil, M.; Khalil, K.A. A systematic literature review of the factors influencing the adoption of autonomous driving. Int. J. Syst. Assur. Eng. Manag. 2020, 11, 1065–1082. [Google Scholar] [CrossRef]
- Davis, F.D. A Technology Acceptance Model for Empirically Testing New End-User Information Systems: Theory and Results. Ph.D. Thesis, Sloan School of Management, Massachusetts Institute of Technology, Cambridge, MA, USA, 1986. [Google Scholar]
- Brown, S.A.; Dennis, A.R.; Venkatesh, V. Predicting collaboration technology use: Integrating technology adoption and collaboration research. J. Manag. Inf. Syst. 2010, 27, 9–53. [Google Scholar] [CrossRef]
- Kijsanayotin, B.; Pannarunothai, S.; Speedie, S.M. Factors influencing health information technology adoption in Thailand’s community health centers: Applying the UTAUT model. Int. J. Med. Inform. 2009, 78, 404–416. [Google Scholar] [CrossRef]
- Udo, G.; Bagchi, K.; Maity, M. Exploring factors affecting digital piracy using the norm activation and UTAUT models: The role of national culture. J. Bus. Ethics 2016, 135, 517–541. [Google Scholar] [CrossRef]
- Martin, H.S.; Herrero, A. Influence of the user’s psychological factors on the online purchase intention in rural tourism: Integrating innovativeness to the UTAUT framework. Tour. Manag. 2012, 33, 341–350. [Google Scholar] [CrossRef]
- Mohammadyari, S.; Singh, H. Understanding the effect of e-learning on individual performance: The role of digital literacy. Comput. Educ. 2015, 82, 11–25. [Google Scholar] [CrossRef]
- Gill, T. Ethical dilemmas are really important to potential adopters of autonomous vehicles. Ethics Inf. Technol. 2021, 23, 657–673. [Google Scholar] [CrossRef]
- Lundgren, B. Safety requirements vs. crashing ethically: What matters most for policies on autonomous vehicles. AI Soc. 2020, 36, 405–415. [Google Scholar] [CrossRef]
- Etienne, H. A practical role-based approach for autonomous vehicle moral dilemmas. Big Data Soc. 2022, 9, 20539517221123305. [Google Scholar] [CrossRef]
- Himmelreich, J. No wheel but a dial: Why and how passengers in self-driving cars should decide how their car drives. Ethics Inf. Technol. 2022, 24, 45. [Google Scholar] [CrossRef]
- Lawlor, R. The ethics of automated vehicles: Why self-driving cars should not swerve in dilemma cases. Res Publica 2022, 28, 193–216. [Google Scholar] [CrossRef]
- Ng, Y.L. Understanding passenger acceptance of autonomous vehicles through the prism of the trolley dilemma. Int. J. Hum.-Comput. Interact. 2023. early access. [Google Scholar]
- Nyholm, S. The ethics of crashes with self-driving cars: A roadmap, I. Philos. Compass 2018, 13, e12507. [Google Scholar] [CrossRef]
- Wischert-Zielke, M.; Weigl, K.; Steinhauser, M.; Riener, A. Age differences in the anticipated acceptance of egoistic versus altruistic crash-control-algorithms in automated vehicles. In Proceedings of the MuC’20: Conference on Mensch und Computer, Magdeburg, Germany, 6–9 September 2020; pp. 467–471. [Google Scholar]
- Wu, S.S. Autonomous vehicles, trolley problems, and the law. Ethics Inf. Technol. 2020, 22, 1–13. [Google Scholar] [CrossRef]
- Yokoi, R.; Nakayachi, K. Trust in autonomous cars: Exploring the role of shared moral values, reasoning, and emotion in safety-critical decisions. Hum. Factors 2021, 63, 1465–1484. [Google Scholar] [CrossRef]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef]
- Faulhaber, A.K.; Dittmer, A.; Blind, F.; Wachter, M.A.; Timm, S.; Sutfeld, L.R.; Stephan, A.; Pipa, G.; Konig, P. Human decisions in moral dilemmas are largely described by utilitarianism: Virtual car driving study provides guidelines for autonomous driving vehicles. Sci. Eng. Ethics 2019, 25, 399–418. [Google Scholar] [CrossRef]
- Zhou, T.; Lu, Y.B.; Wang, B. Integrating TTF and UTAUT to explain mobile banking user adoption. Comput. Hum. Behav. 2010, 26, 760–767. [Google Scholar] [CrossRef]
- Zhao, Y.Y.; Bacao, F. What factors determining customer continuingly using food delivery apps during 2019 novel coronavirus pandemic period? Int. J. Hosp. Manag. 2020, 91, 102683. [Google Scholar] [CrossRef]
- Wang, H.L.; Tao, D.; Yu, N.; Qu, X.D. Understanding consumer acceptance of healthcare wearable devices: An integrated model of UTAUT and TTF. Int. J. Med. Inform. 2020, 139, 104156. [Google Scholar] [CrossRef]
- Tran, V.; Zhao, S.C.; Diop, E.; Song, W.Y. Travelers’ acceptance of electric carsharing systems in developing countries: The case of China. Sustainability 2019, 11, 5348. [Google Scholar] [CrossRef]
- Yang, H.H.; Feng, L.; MacLeod, J. Understanding college students’ acceptance of cloud classrooms in flipped instruction: Integrating UTAUT and connected classroom climate. J. Educ. Comput. Res. 2019, 56, 1258–1276. [Google Scholar] [CrossRef]
- Macedo, I.M. Predicting the acceptance and use of information and communication technology by older adults: An empirical examination of the revised UTAUT2. Comput. Hum. Behav. 2017, 75, 935–948. [Google Scholar] [CrossRef]
- Schaupp, L.C.; Carter, L.; McBride, M.E. E-file adoption: A study of US taxpayers’ intentions. Comput. Hum. Behav. 2010, 26, 636–644. [Google Scholar] [CrossRef]
- Huang, Y.; Sengupta, J. The influence of disease cues on preference for typical versus atypical products. J. Consum. Res. 2020, 47, 393–411. [Google Scholar] [CrossRef]
- Zhou, Y.; Fei, Z.; He, Y.; Yang, Z. How human-chatbot interaction impairs charitable giving: The role of moral judgment. J. Bus. Ethics 2022, 178, 849–865. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Yang, C.; Gu, C.; Wei, W. Does robotaxi offer a positive travel experience? A study of the key factors that influence consumers’ use of the robotaxi. Systems 2023, 11, 559. [Google Scholar] [CrossRef]
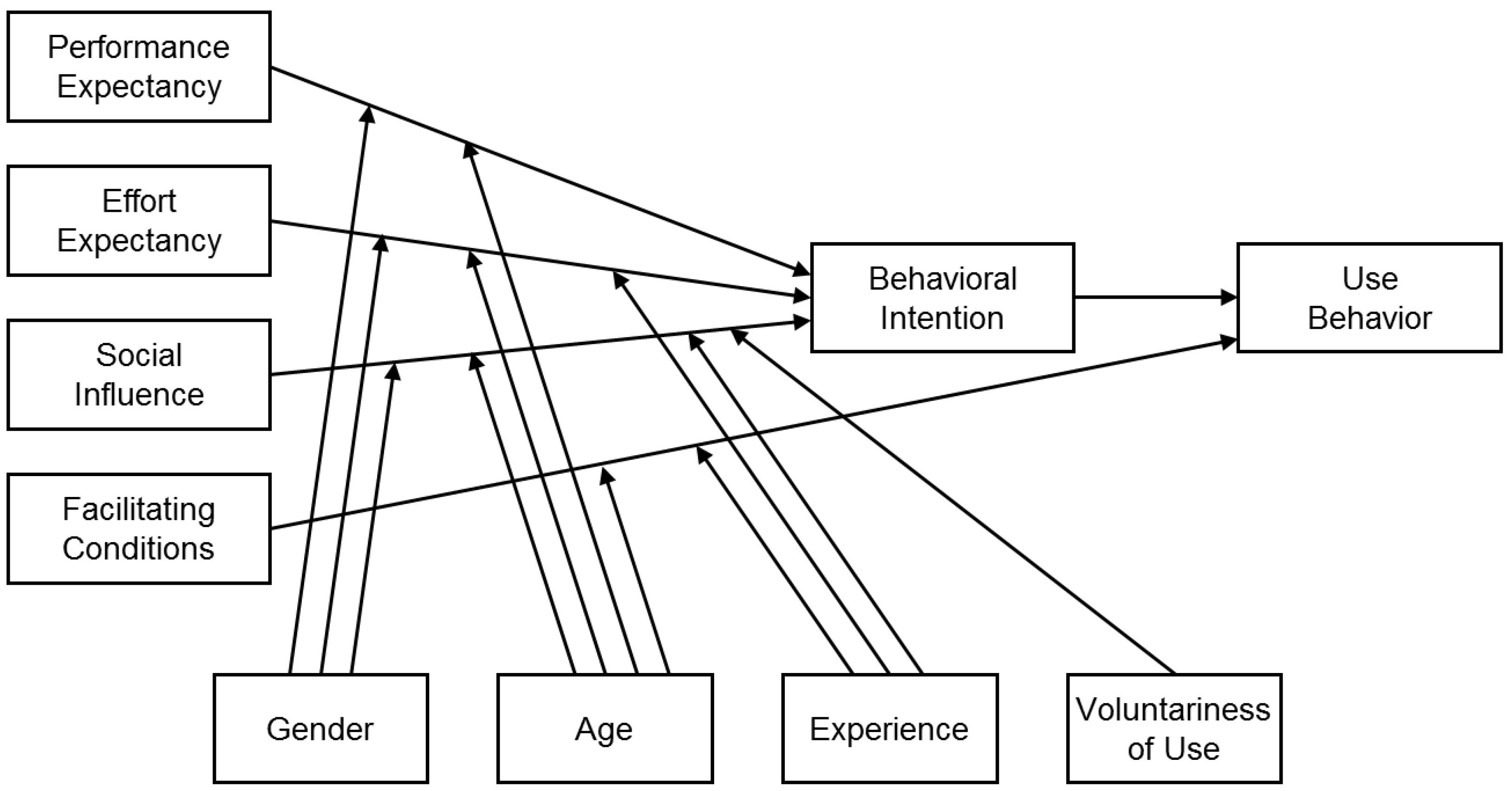
| Constructs Not Included | Reasons |
|---|---|
| Use behavior | Because robotaxi has not been widely implemented, use behavior is rare, which may not generate statistically meaningful results. |
| Facilitating conditions | Facilitating conditions is expected to be an antecedent of use behavior but not of behavioral intention. With use behavior excluded, facilitating conditions is also removed |
| Experience | Because robotaxi has not been widely implemented, experience is rare, which may not generate statistically meaningful results. |
| Voluntariness of use | Because potential robotaxi customers are by no means compelled to hail a robotaxi, it is not necessary to assess voluntariness in this study. |
| Variables | Information Collected by the Questionnaire | Value | Note |
|---|---|---|---|
| IV | |||
| PE | Performance expectancy | 1 ≤ PE ≤ 7 | PE is calculated by averaging the points of the four questions |
| EE | Effort expectancy | 1 ≤ EE ≤ 7 | EE is calculated by averaging the points of the four questions |
| SI | Social influence | 1 ≤ SI ≤ 7 | SI is calculated by averaging the points of the four questions |
| TD_REL | Trolley dilemma relevance | 1 ≤ TD_REL ≤ 7 | TD_REL is calculated by averaging the points of the four questions |
| TD_ALG | Trolley dilemma algorithm | 0 or 1 | 0: utilitarian (Group A) 1: egocentric (Group B) |
| DV | |||
| BI | Behavioral intention | 1 ≤ BI ≤ 7 | BI is calculated by averaging the points of the three questions |
| Control | |||
| Female | Gender | 0, 1 | 0: male 1: female |
| Age | Age | 0, 1, 2, 3, 4 | 0: under 20 1: between 20 and 29 2: between 30 and 39 3: between 40 and 49 4: 50 and above |
| TaxiUsage | Taxi usage | 0, 1, 2 | 0: less than once a week 1: at least once a week 2: almost daily |
| RoboTaxiUsage | Robotaxi usage | 0, 1 | 0: the participant has not used robotaxi 1: the participant has used robotaxi |
| RoboTaxiUsageFF | Robotaxi usage by family and friends | 0, 1 | 0: the participant’s family or friend has not used robotaxi 1: the participant’s family or friend has used robotaxi |
| Variables | Min. | Max. | Average | Standard Deviation | N. |
|---|---|---|---|---|---|
| IV | |||||
| PE | 1.00 | 7.00 | 5.51 | 0.91 | 299 |
| EE | 2.75 | 7.00 | 5.90 | 0.75 | 299 |
| SI | 1.00 | 7.00 | 5.19 | 1.09 | 299 |
| TD_REL | 1.25 | 7.00 | 4.96 | 1.23 | 299 |
| TD_ALG | 0.00 | 1.00 | 0.50 | 0.50 | 299 |
| DV | |||||
| BI | 1.00 | 7.00 | 4.73 | 1.55 | 299 |
| Control | |||||
| Female | 0.00 | 1.00 | 0.55 | 0.50 | 299 |
| Age | 0.00 | 4.00 | 1.39 | 0.86 | 299 |
| TaxiUsage | 0.00 | 2.00 | 0.62 | 0.53 | 299 |
| RoboTaxiUsage | 0.00 | 1.00 | 0.16 | 0.37 | 299 |
| RoboTaxiUsageFF | 0.00 | 1.00 | 0.34 | 0.48 | 299 |
| PE | EE | SI | TD_REL | TD_ALG | BI | Female | Age | TaxiUsage | RoboTaxiUsage | RoboTaxiUsageFF | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| PE | 1 | ||||||||||
| EE | 0.277 *** | 1 | |||||||||
| SI | 0.620 *** | 0.357 *** | 1 | ||||||||
| TD_REL | 0.017 | −0.030 | −0.086 | 1 | |||||||
| TD_ALG | 0.048 | 0.064 | 0.027 | 0.004 | 1 | ||||||
| BI | 0.446 *** | 0.253 *** | 0.370 *** | −0.052 | 0.488 *** | 1 | |||||
| Female | −0.116 * | −0.097 | −0.067 | −0.017 | 0.070 | −0.021 | 1 | ||||
| Age | 0.069 | 0.043 | 0.104 | 0.058 | 0.128 * | 0.158 ** | −0.211 *** | 1 | |||
| TaxiUsage | 0.244 *** | 0.189 ** | 0.212 *** | −0.048 | −0.067 | 0.033 | −0.220 *** | 0.149 ** | 1 | ||
| RoboTaxiUsage | 0.211 *** | 0.118 * | 0.258 *** | 0.046 | 0.081 | 0.200 *** | −0.104 | 0.060 | 0.117 * | 1 | |
| RoboTaxiUsageFF | 0.197 *** | −0.021 | 0.251 *** | −0.080 | 0.082 | 0.142 * | −0.094 | 0.001 | 0.114 * | 0.484 *** | 1 |
| BI | |||||
|---|---|---|---|---|---|
| (1) | (2) | (3) | (4) | (5) | |
| PE | 0.578 *** (0.111) | 0.607 *** (0.110) | 0.620 *** (0.111) | 0.572 *** (0.096) | 0.402 (0.260) |
| EE | 0.240 * (0.113) | 0.281 * (0.114) | 0.279 * (0.114) | 0.197 * (0.099) | 0.468 (0.266) |
| SI | 0.166 (0.095) | 0.120 (0.096) | 0.106 (0.097) | 0.148 (0.084) | 0.176 (0.201) |
| TD_REL | −0.079 (0.064) | −0.075 (0.055) | −0.309 * (0.141) | ||
| TD_ALG | 1.368 *** (0.138) | 1.492 *** (0.342) | |||
| PE × Female | −0.134 (0.210) | ||||
| EE × Female | −0.381 (0.201) | ||||
| SI × Female | 0.030 (0.170) | ||||
| TD_REL × Female | 0.152 (0.119) | ||||
| TD_ALG × Female | −0.136 (0.287) | ||||
| PE × Age | 0.200 (0.129) | ||||
| EE × Age | −0.046 (0.171) | ||||
| SI × Age | 0.034 (0.117) | ||||
| TD_REL × Age | 0.082 (0.065) | ||||
| TD_ALG × Age | −0.059 (0.172) | ||||
| Female | 0.167 (0.164) | 0.165 (0.164) | 0.019 (0.142) | 2.158 (1.367) | |
| Age | 0.259 ** (0.094) | 0.266 ** (0.094) | 0.136 (0.082) | −0.884 (1.017) | |
| TaxiUsage | −0.352 * (0.156) | −0.363 * (0.156) | −0.232 (0.136) | −0.272 (0.140) | |
| RoboTaxiUsage | 0.349 (0.249) | 0.381 (0.250) | 0.295 (0.217) | 0.246 (0.218) | |
| RoboTaxiUsageFF | 0.104 (0.192) | 0.079 (0.193) | −0.045 (0.168) | −0.051 (0.167) | |
| F-value | 28.51 | 12.99 | 11.74 | 23.91 | 12.76 |
| p-value | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| Adjusted R2 | 0.216 | 0.243 | 0.244 | 0.434 | 0.441 |
| N | 299 | 299 | 299 | 299 | 299 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, S.; Ding, J. Will Customers’ Understanding of the Trolley Dilemma Hinder Their Adoption of Robotaxi? Sustainability 2024, 16, 2977. https://doi.org/10.3390/su16072977
Jia S, Ding J. Will Customers’ Understanding of the Trolley Dilemma Hinder Their Adoption of Robotaxi? Sustainability. 2024; 16(7):2977. https://doi.org/10.3390/su16072977
Chicago/Turabian StyleJia, Susan (Sixue), and Jiaying Ding. 2024. "Will Customers’ Understanding of the Trolley Dilemma Hinder Their Adoption of Robotaxi?" Sustainability 16, no. 7: 2977. https://doi.org/10.3390/su16072977
APA StyleJia, S., & Ding, J. (2024). Will Customers’ Understanding of the Trolley Dilemma Hinder Their Adoption of Robotaxi? Sustainability, 16(7), 2977. https://doi.org/10.3390/su16072977