1. Introduction
1.1. Background Information
Wind forecasting techniques are used for the integration of wind turbines into the electricity market and their dispatch. In this way, it is possible to forecast the amount of energy produced, taking into account the dynamics of the electricity market, which are determined by the demand for electricity [
1,
2], and synchronized with the power curve of the installed wind turbines, which predicts the output as a function of the wind speed [
3]. In order to know the wind speed variation curves, it is necessary to make recordings over sufficiently long periods using anemometric towers. In many cases, these data are used in mathematical models to determine monthly wind speed maxima [
4]. All these measurements can be used for the individual design of wind turbines, as well as for their selection from a standardized range [
5].
Certain methods and control algorithms are chosen depending on the type of turbine and the mode of operation [
6,
7,
8,
9]. Adaptive [
10] or dynamic control can be used for partial load and rated load operation. This allows for the wind turbine to be controlled even during rapid discharges, when the transient rotor speed tends to increase beyond the limits [
11,
12,
13]. To ensure the more flexible operation of wind farms and turbines, a power monitoring architecture has been proposed through an individual interface with each turbine. The proposed monitoring architecture does not require multiple pieces of information about the turbine dynamics [
14]. If a power oscillation damping controller is used, it will affect the wind turbine system to a similar or lesser extent than the wind speed variations [
15]. In the case of wind turbines equipped with double-fed induction generators (DFIG), it has been proposed to use a different algorithm to determine the maximum power point using the electrical power values delivered at the output. Based on these values, the wind speed and turbine shaft speed are estimated, allowing for continuous control of the maximum power point operation without the need for a wind speed or turbine shaft speed sensor [
16]. There are situations where the simulated peak power point values are higher than those obtained during operation. This can be caused by additional friction that can occur in the cooling system [
17].
The value of the optimum mechanical angular velocity,
ωOPTIM, and the power at the electrical generator,
PEG, depend on the value of the wind speed,
v, which are generally [
18,
19,
20,
21,
22] not well known. The maximum capture of wind energy can only be achieved with the correct mechanical angular velocity dependence on the wind speed [
18,
19,
20,
23,
24]. As atmospheric conditions, mechanical stresses, and even turbine geometry change over time, the dependence of the mechanical angular velocity on the initially set wind speed changes over time and, therefore, requires recalculation based on the measurements [
25]. At many sites [
22,
26,
27,
28], energy efficiency is reduced due to the age of the turbine’s calibration method, which uses invalid mathematical models.
This study is based on wind speed values, variable speed over time, and visualizing the optimal area from an energy point of view. Most studies have treated existing wind systems based on inadequate calibration methods and without effective wind speed processing. Operating a WT at the point of maximum power, MPP, and at the optimum mechanical angular velocity, MAV,
ωOPTIM, is a complex problem at time-varying wind speeds, due to the high mechanical inertia of wind systems [
28,
29,
30,
31,
32]. The time variations in wind speed and velocity (mechanical angular velocity), i.e., the functions
v(
t) and
n(
t) and
ω(
t), are continuous and derivable functions. Due to the high mechanical inertia of wind systems [
18,
33,
34], the speed changes slowly over time and it is not a problem to record the current wind speed variations at the site under study [
33,
35]. The wind speed also changes continuously over time and recording it does not pose any particular problem. Therefore, from measurements, three fundamental quantities are easily and quite accurately known: wind speed,
v, power,
PEG, and MAV,
ω, at the EG, the basic quantities for WT operation.
Based on these basic quantities, an algorithm is constructed that allows us to visualize the optimal energy zone and to know the dependence of the optimal mechanical angular velocity,
ωOPTIM (
v), on the wind speed,
v. The dependence of the optimal mechanical angular velocity on the wind speed is the reference quantity in the control design, with which achieves maximum wind energy. For wind power systems operating at
v = constant, it is not necessary to know the exact dependence of the optimal MAV,
ωOPTIM, on the wind speed, and the Disturbance and Observe Method, POM, can be applied to the maximum power point, MPP, since it is time-invariant [
19,
20,
23].
In the present study, local speed extremes or the function ω(t) are identified simply by recording the speed over time. Based on the results obtained, the mathematical model of the WT is determined. By visualizing the operating points on the WT power curve, the power losses that occur are estimated. The actual power losses are higher than the calculated ones because the calculations consider some operating points as MPPs, an assumption that cannot be verified due to the lack of more complete experimental data. The visualization of the coordinates of the optimal values is performed during the operation of the wind turbine.
1.2. Specific Objectives and Approach of this Study
The problems addressed in this paper are the mathematical modeling of wind turbines and the calculation of power losses for large variations in wind speed over time, which are fundamental in control design [
18,
33,
34,
36,
37]. The mathematical model for a wind turbine (WT) is based on the WT power characteristic, the function between the wind speed,
v, and the mechanical angular speed,
ω, of the turbine,
PWT(
ω,v). In most previous papers [
18,
19,
20,
23], these issues have been addressed at constant wind speeds over time.
The measurements of wind speed, power, and generator speed were made in Galbiori, Dobrogea [
33]. The operating points were positioned on the power characteristic, and compared to the maximum power points, MPPs. Based on the recordings of the fundamental quantities, the MM-WT was determined, a model based on the function
PWT(
ω,v), characteristic of the WT power. Mathematical models were calculated for wind speed ranges. The results obtained provide the basis for optimal energy control, with the reference parameters updated in real-time, which is particularly useful for capturing the maximum wind energy, a control that does not exist in the literature. This study highlights the relevant aspects, such as the determination of the turbine power, the operating points where the maximum wind energy is not captured, and the uncertain aspects, where the MPP may be the optimal range of the MAV,
ωOPTIM.
The specialized literature deals just peripherally with the performance of wind turbines operating in areas where the wind potential presents significant variations over time, particularly if those achieve the maximum capture of wind energy. This work aims to estimate the energy efficiency of wind turbines by visualizing the optimal area from the energy point, to locate the operating points of the WT relative to the point of maximum power, corresponding to a certain value of the wind speed. The original contributions of the authors consist in their analysis of the experimental data from 2.5 [MW] wind turbines in operation in the Dobrogea area [
33], and determining the extent to which they operate at their maximum power point.
The conducted study is specifically beneficial for assessing the energy efficiency of wind turbines functioning at variable wind speeds over time, as it indicates the area where wind turbines function at the maximum power point.
The main sections of this paper are as follows: an analysis of the wind speed and mechanical speed at the generator; the positioning of the operating points on the WT power curve; the determination of the mathematical model for the WT; the development of an algorithm for determining power losses; discussion, results, and perspectives; and the references used.
2. Wind Speed and Mechanical Speed at the Generator
The analyzed wind turbine at the site in Dobrogea was manufactured by GE (General Electric 2.5 MW series, 100 m rotor diameter), and characterized by an equivalent inertia moment (turbine + gearbox + generator),
J = 5372.5 [kgm
2], and nominal power obtained at 1500 [rpm]—the nominal rotational speed at the generator level. This study is based on measurements of wind speed, power, and generator speed (=AV) over time, made on 15.06.2022, over a time interval of 280 min, at Galbiori, Dobrogea [
18], at a sampling step of 10 [min]. In this area, the variations in wind speed over time are significant. The size of the time interval is important and depends on two important factors: the variation in the wind speed and the value of the equivalent moment of inertia. Considering the variation in the wind speed over time for the analyzed site in the Dobrogea area, and the 2.5 MW installed capacity of the operating wind turbine, we considered that an experimental data set of over 280 min with a 10 min resolution was valid, based on the results obtained through the simulation experiments. At the high value of the equivalent inertia moment, the atmospheric turbulence does not significantly influence the operation of the wind power system. The wind speeds were measured at hub height with a high-precision anemometer. The anemometer could monitor the instantaneous wind speed as well as the wind indicator, measuring the average values for the last two, five, or ten minutes.
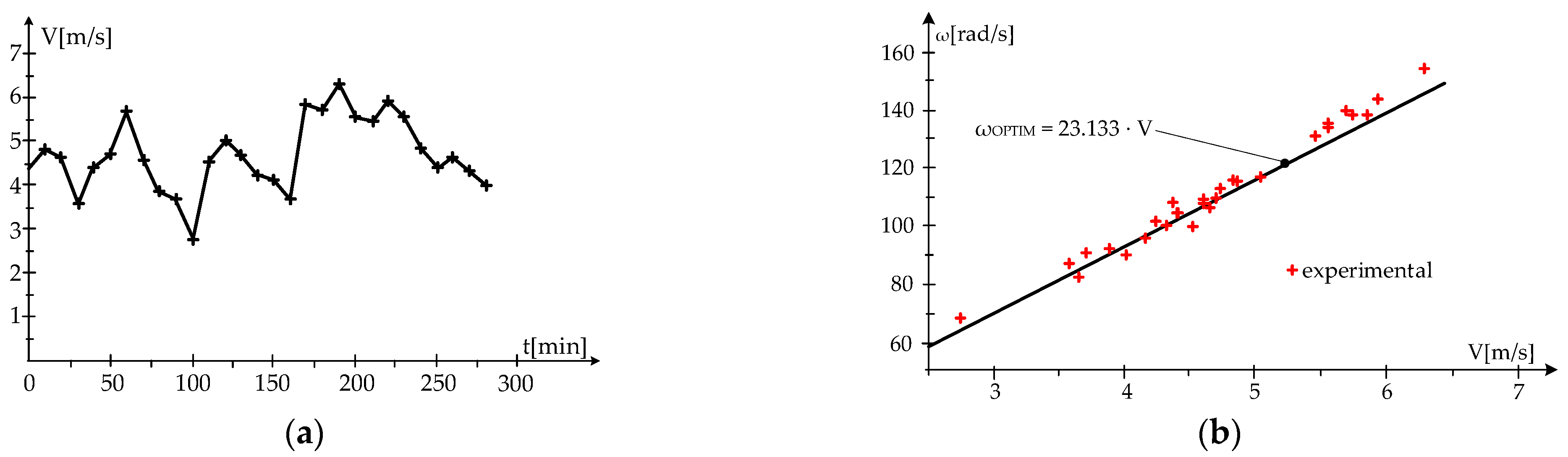
The wind speed changed from 2.7 [m/s] to 6.3 [m/s], and the mechanical angular velocity from 67.963 [rad/s] to 154.41 [rad/s] (
Figure 1).
Analyzing the distribution of the wind speed and mechanical angular velocity values given in
Figure 1, it follows that:
In the area with wind speeds greater than 5 [m/s], the measured values of the MAV are larger than those of the ωOPTIM;
In the area with wind speeds lower than 5 [m/s], the measured values of the MAV are on either side of the ωOPTIM, deduced from the mathematical model of the turbine;
At the maximum wind energy, the measured values of the MAV captured should uniquely define the function ωOPTIM (v).
The dependence of the optimum mechanical angular velocity of the turbine on the wind speed, the function
ωOPTIM (
v), is deduced from the mathematical model of the turbine, MM-WT [
23], and has the form:
Based on this, the WT is brought to the MPP and maintained at the optimum MAV, ωOPTIM, to achieve maximum wind energy capture. In the control design, the use of the MM-WT allows for the optimum mechanical angular velocity, ωOPTIM, to be determined as a guide, but it must be recalculated periodically as atmospheric conditions, mechanical stresses, and even turbine geometry change over time.
3. Determination of Turbine Power from Generator Power and Speed
The determination of the turbine power,
PWT, is obtained from the kinetic momentum equation [
18,
21,
31,
37] with the form:
where
J is the equivalent moment of inertia;
ω is the mechanical angular velocity, MAV, at the electric generator shaft, EG;
dω/
dt is the time derivative of the MAV;
MWT is the time given by the WT, relative to the EG shaft; and
MEG is the electromagnetic torque given by the EG.
The local maxima and minima are for the rotational speed; the novelty consists in the fact that
J, the inertial moment, is no longer needed to compute the WT power because the derivative of the MAV is zero for those local maxima. From the kinetic momentum equation, by multiplying by
ω, we obtain the power equation:
where
PWT is the useful power given by the WT, referred to as the shaft of the electric generator, and
PEG is the electromagnetic power of the EG at the shaft.
The power given by the WT,
PWT, is found by the inertial power
and in the power delivered by the electrical generator to the grid,
PEG, according to the equation of motion:
The power given by the WT is obtained by summing the two powers: the inertial power and the power from the electric generator. The inertial power is determined by recording the rotation MAV at the EG, n/ω, and the power from the electric generator is obtained from the power delivered by the EG to the grid, by dividing by the EG efficiency value.
At the operating points defined by the local extremes of the velocity, the derivative of the mechanical angular velocity,
dω/
dt, is zero. And because
the inertial power is zero and the power given by the WT, in the dynamic mode, is equal to the power from the electric generator
PEG:
Therefore, it is not necessary to know the value of the equivalent moment of inertia, J, as the power given by the WT is equal to the power from the EG (which is obtained from the power delivered to the grid by dividing it by the value of the EG output).
Table 1 shows the measured values of wind speed, velocity, and power delivered by the wind turbine, which change depending on the wind speed. The measurements were taken at 10 min intervals.
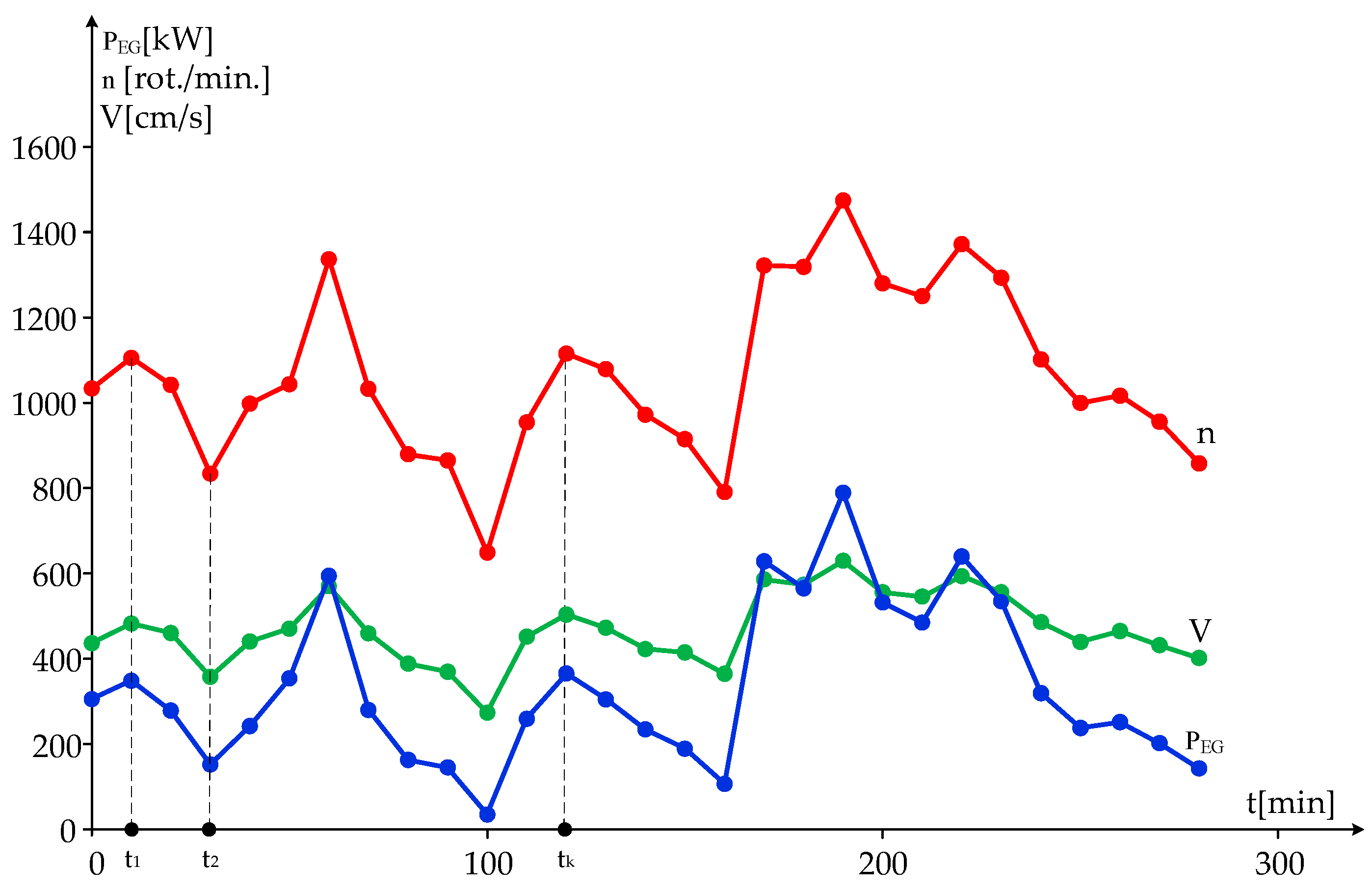
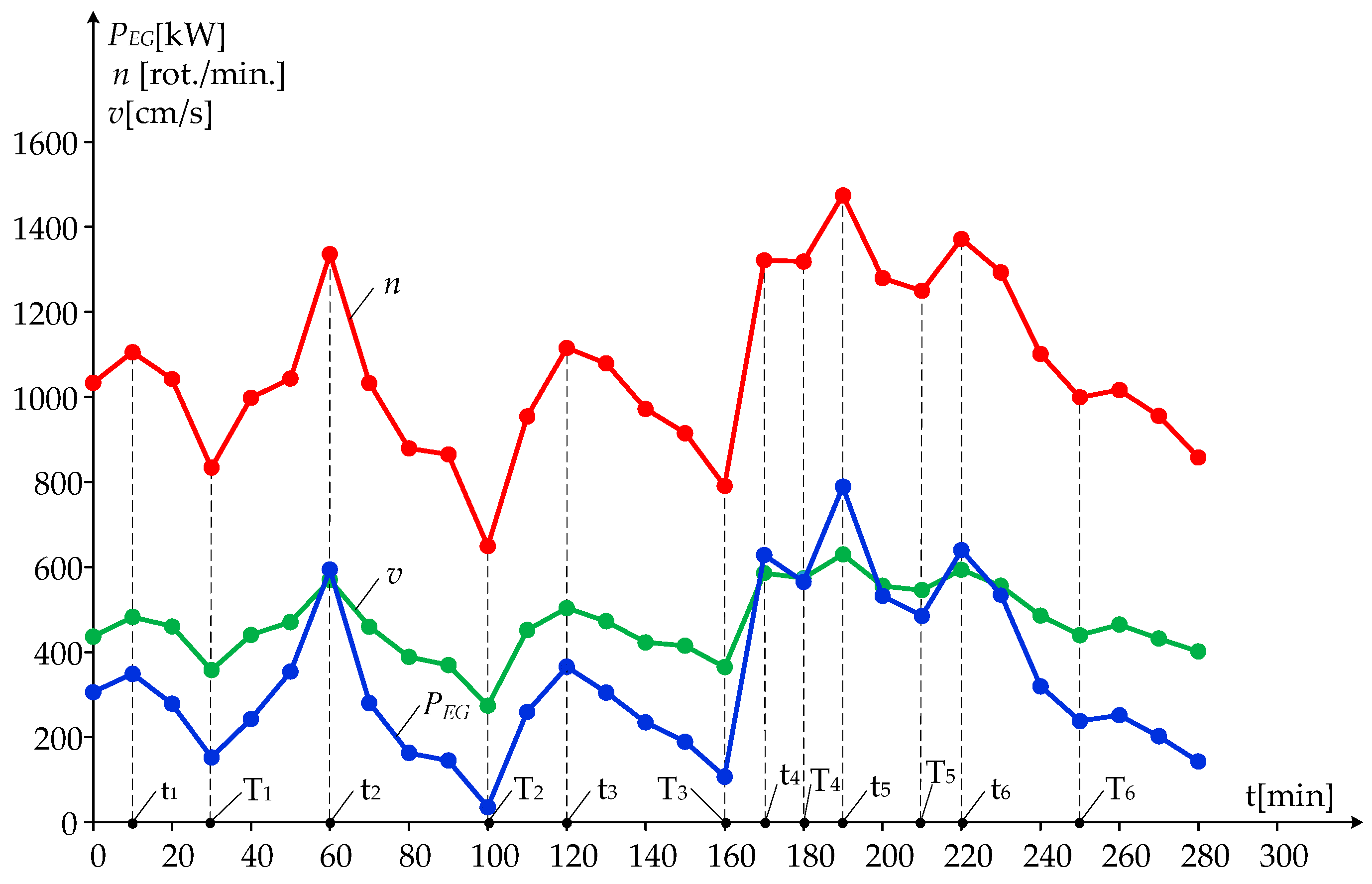
At times t
1, t
2, t
3, t
4, t
5, and t
6, shown in
Figure 2, the wind speed, rotation speed, and generator power exhibit the local maxima. Also, at times T
1, T
2, T
3, T
4, T
5, and T
6, they show the local minimum values.
In the following, the measured values of speed and power are compared with the optimal values derived from the mathematical model of the turbine, MM-WT [
23], which have the form:
where
kn is the proportionality factor for speed and
kp is the proportionality factor for power.
At these local extremes, the values of wind speed, speed, and power at the generator are the local maxima.
At t
1 = 10 [min],
v = 437 [cm/s],
n = 1105.52 [rot/min], and
PEG = 306.22 [kW],
Based on (10) and (11), and the values of wind speed, rotational speed, and supplied electric power, we computed the
n/
v ratio and the
PWT for the 10 min intervals, shown in
Table 2.
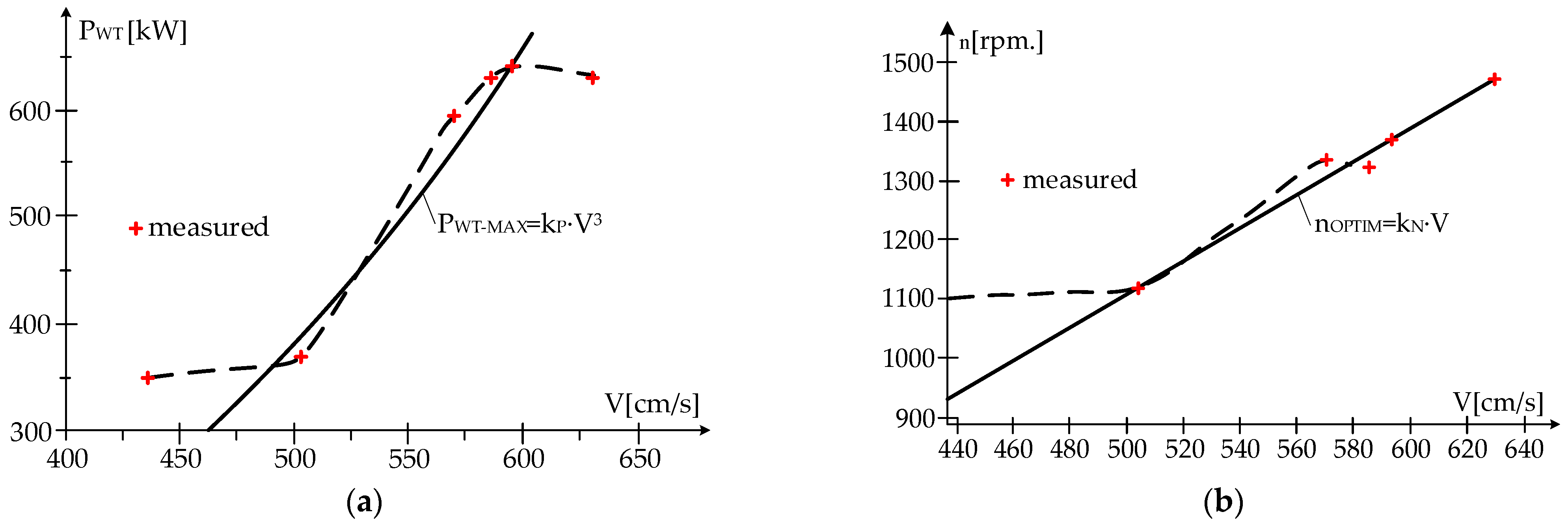
Table 3 summarizes the values for speed and power at the local maxim (
Figure 3).
Figure 4 shows the dependence of power and speed on wind speed at the local maxima, with dash lines representing the interpolation of the measured points.
It can be seen from
Figure 4 that for both the power and speed dependencies, the measured values sometimes differ significantly from those given by the functions:
nOPTIM(v) and
PWT–MAX(v).The same problems arise for the case of the local minima.
At T
1 = 30 [min],
v = 358 [cm/s],
n = 833.87 [rot/min], and
PEG = 152.77 [kW],
Similarly, we proceeded with the minimum wind speed values and calculated the
n/
v or
PWT ratio, as shown in
Table 4.
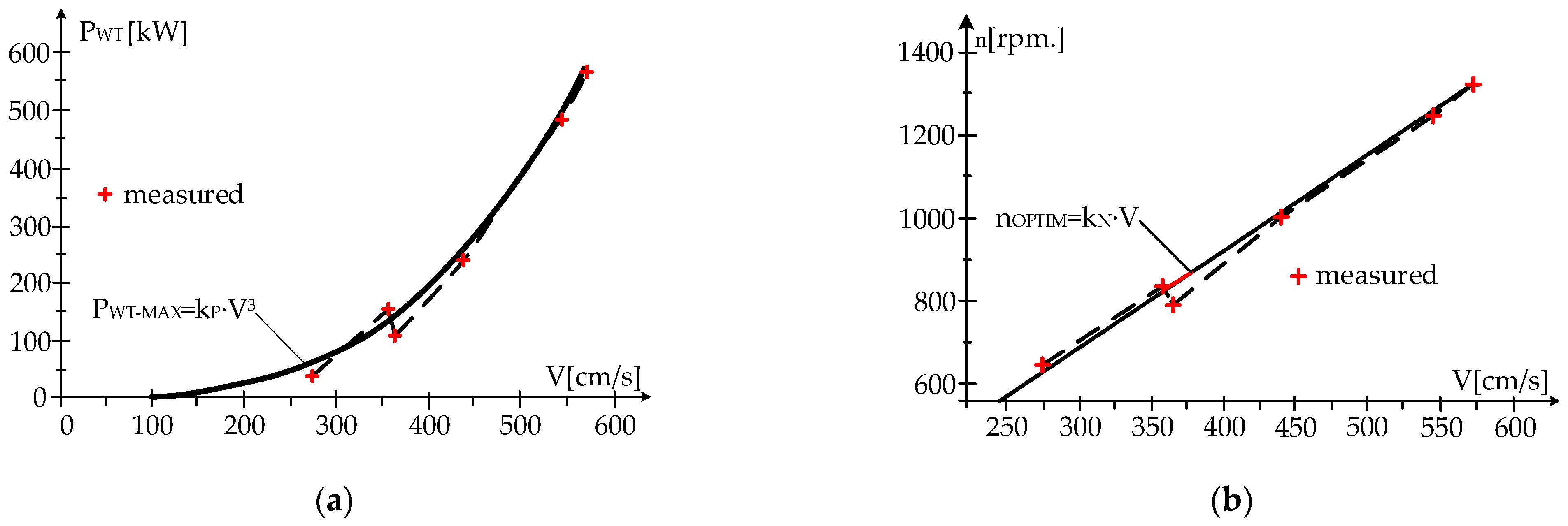
Table 5 summarizes the values of speed and power at the local minimums.
Figure 5 plots the calculated optimum values against the measured values as well as the interpolation of the measured points, highlighted with dash lines. From the MM-WT, the power and speed dependencies at the local minima are as follows:
From the MM-WT, the power and speed dependencies at the local minima are
In this case, too, the measured values are different from those resulting from the functions: nOPTIM(v) and PWT-MAX(v). The results obtained are valid only for a sampling step of 10 min, the value for which the design control was built.
4. Positioning of the Operating Points on the Power Characteristic
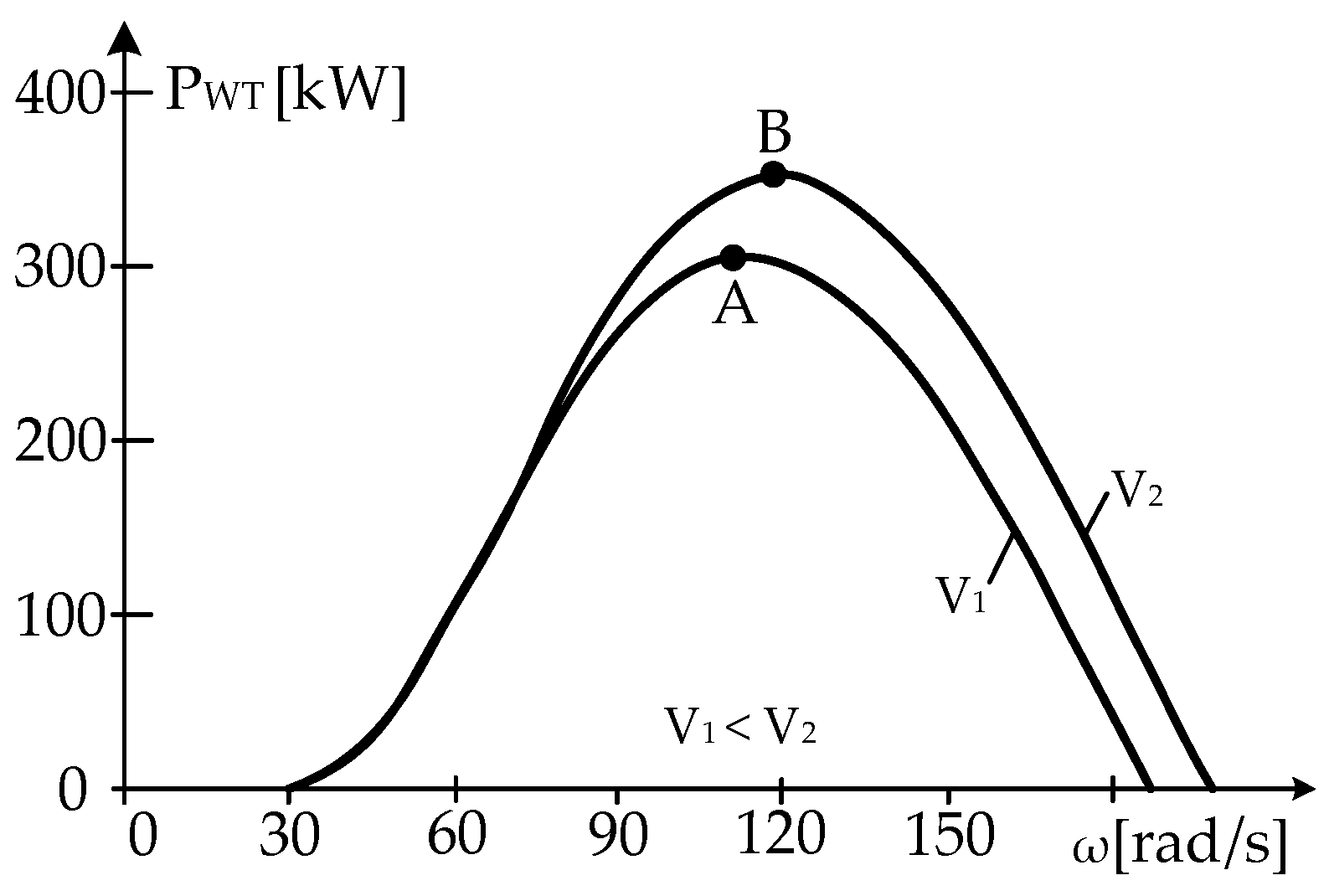
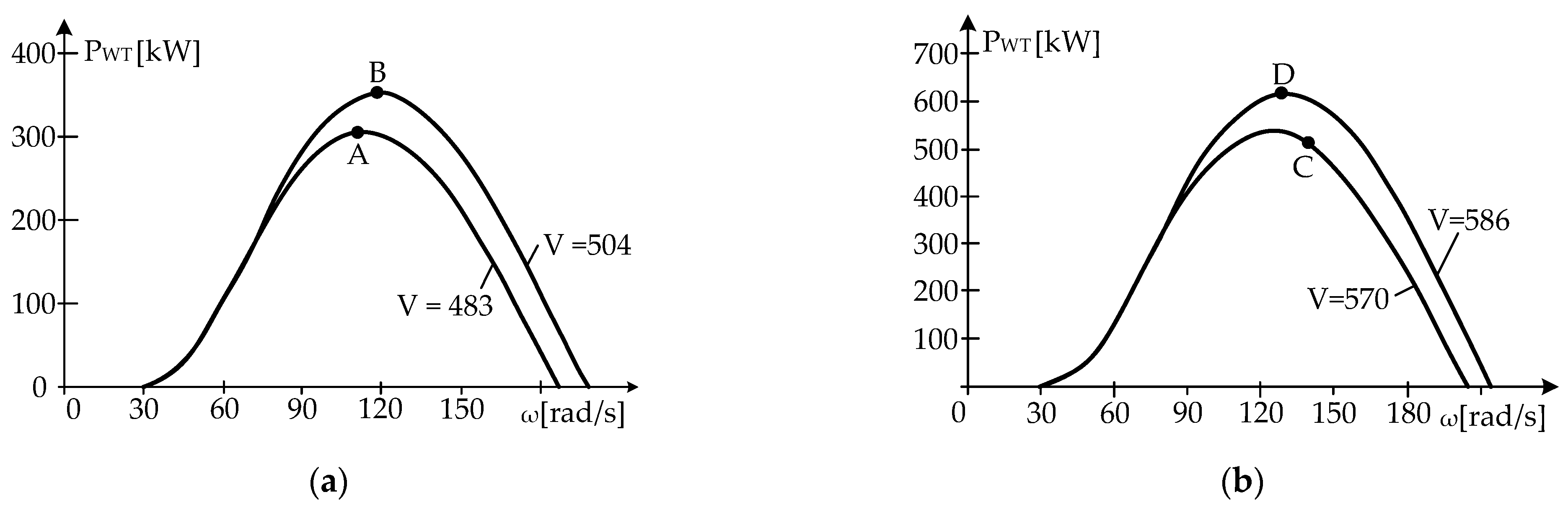
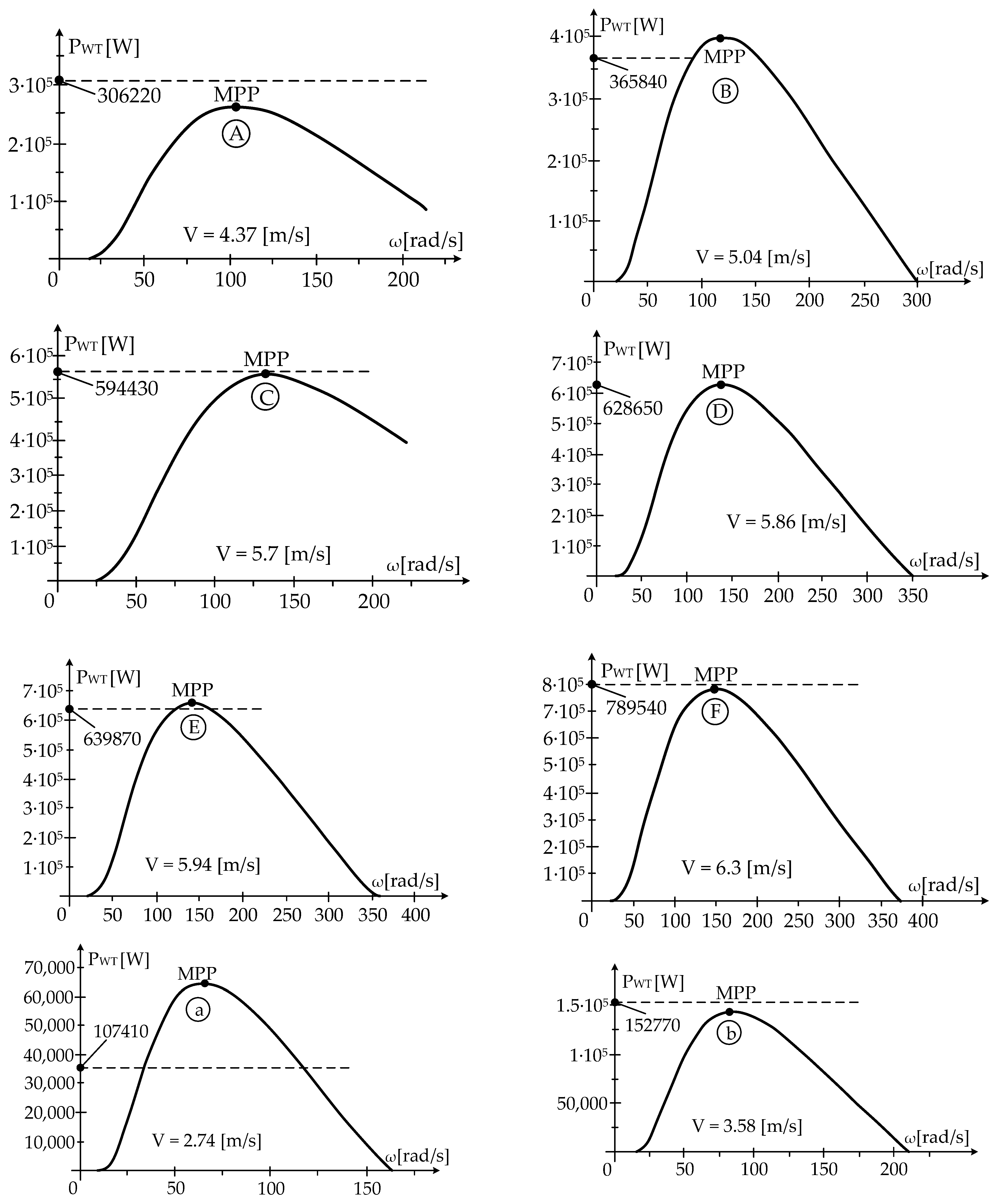
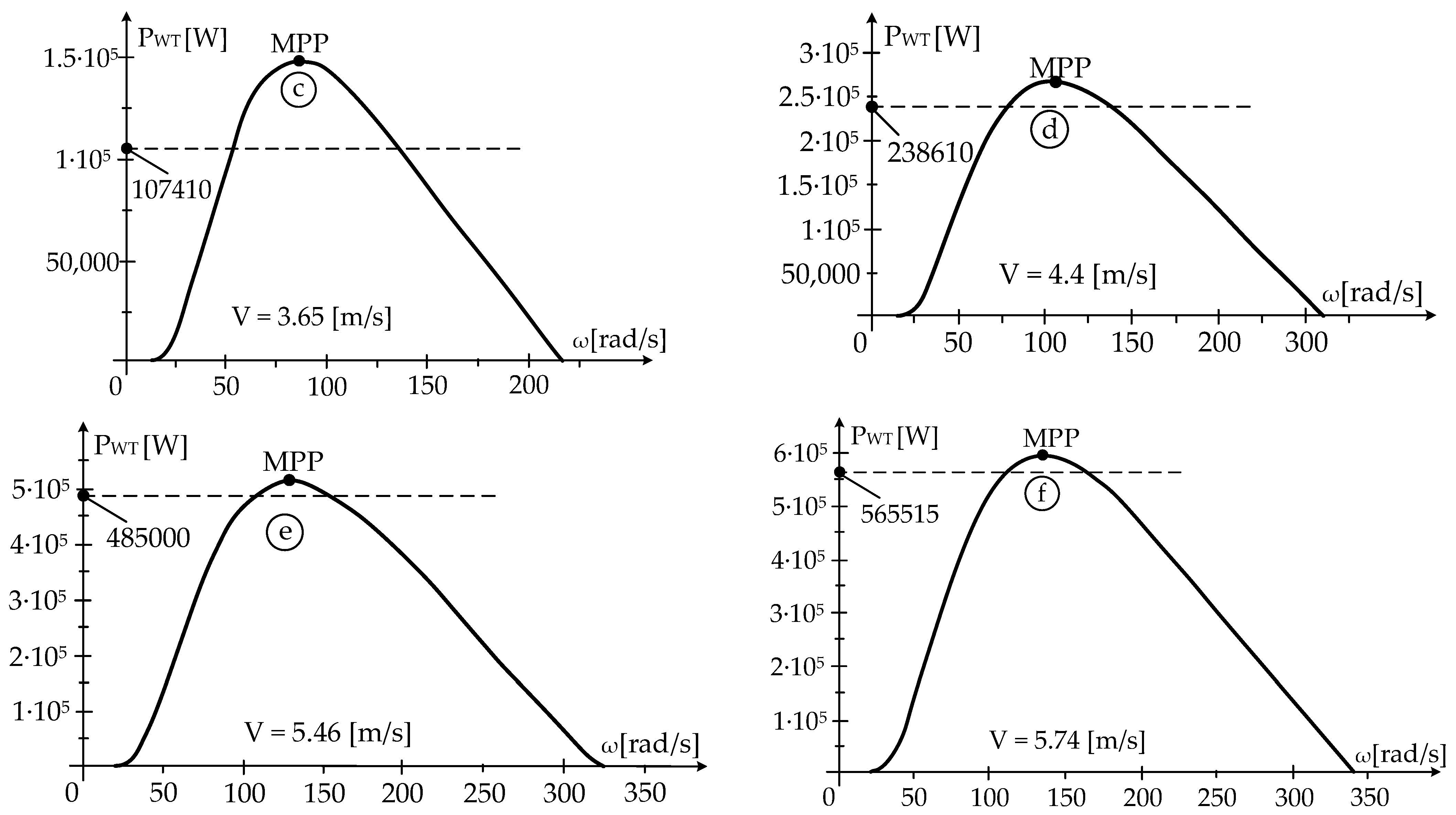
By positioning the operating points on the power characteristic, the PWT(ω,v) function, the WT operation is visualized in comparison to the maximum power points, MPPs. Given the graph of the power function, PWT(ω,v), with the maximum, MPP, at ωOPTIM, the operating points can be approximately located considering the values of the mechanical angular velocity and EG power.
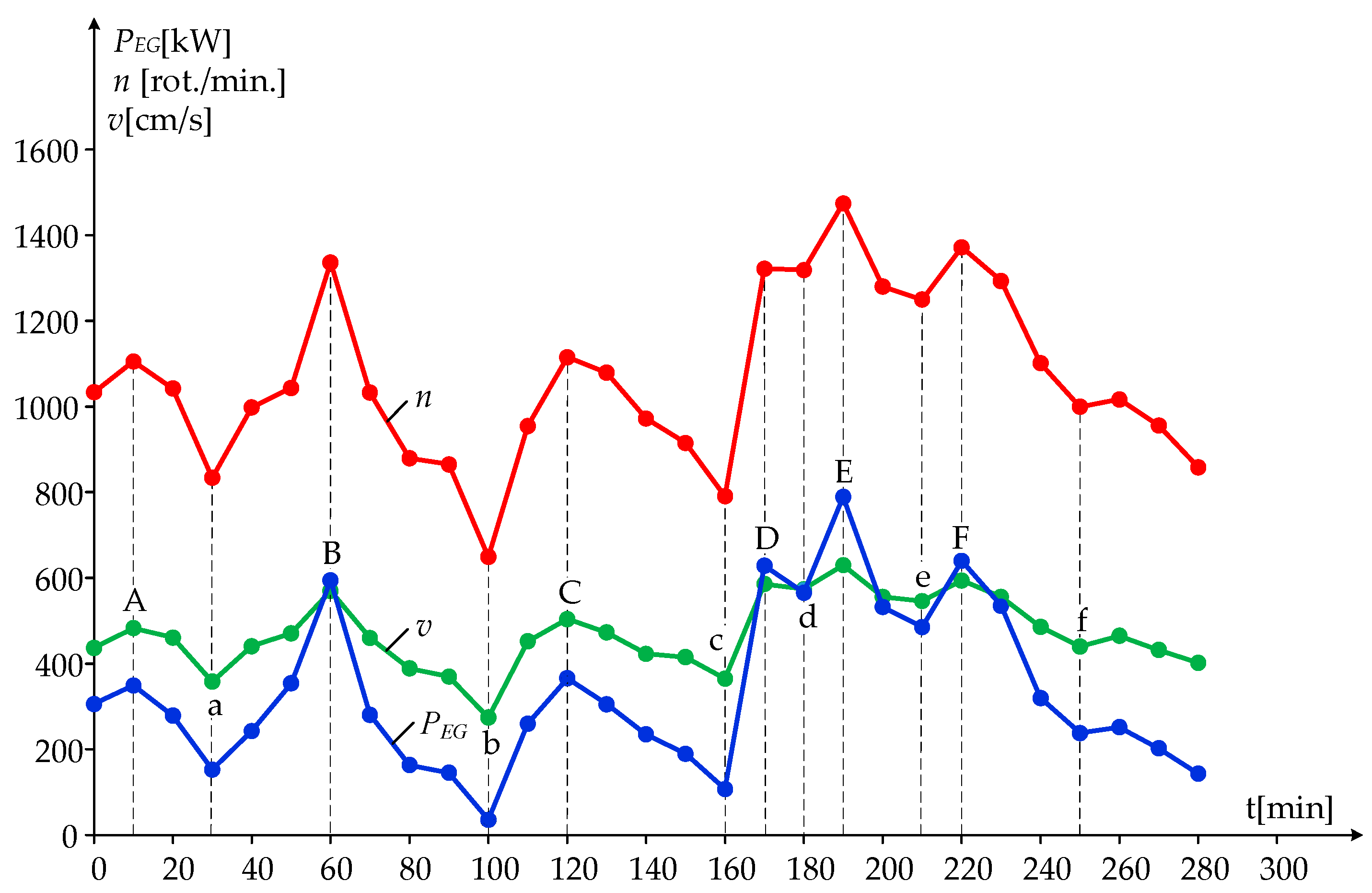
The operating points are
A,
B,
C,
D,
E, and
F at times when the wind speed, speed, and generator power are at the local maxima (
Figure 3). At times when
v(
t),
n(
t), and
PWT(
t) are at the local minima, the operating points are
a,
b,
c,
d,
e, and
f (
Figure 3).
In the following, the measured values of speed and power are compared with the optimum values derived from the mathematical model of the turbine, MM-WT [
37], which have the form:
At these local extreme points, the values of the wind speed, speed, and power at the generator are the operating points
A,
B,
C,
D,
E, and
F at local highs, and
a,
b,
c,
d,
e, and
f, at local lows, which are, probably, in the MPP area (
Figure 3).
The location of the operating points is approximate because the coordinates of the maximum power point (MPP) are not known with certainty and will change over time for wind systems operating at wind speeds that vary significantly over time. At the local maxima for the function
nOPTIM(v), the operating points can be seen in
Figure 6.
For the other operating points, we proceeded in a similar way and the results are shown in
Table 6.
The operating points E and F are not represented because they are not of interest, probably being the MPPs, since their speeds and powers may be the optimal values, nOPTIM and PWT–MAX.
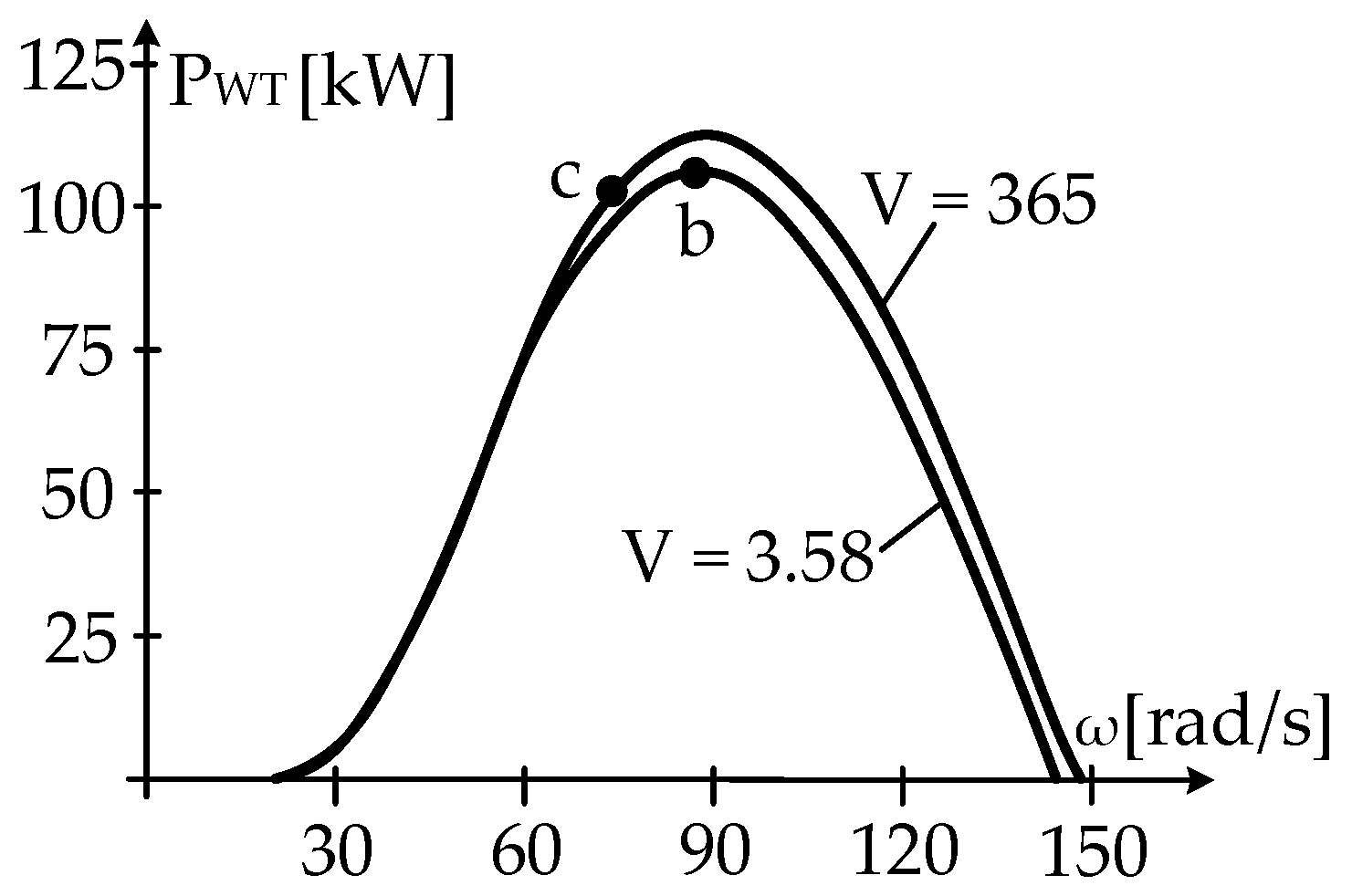
Vc is 365 for point c and
vb is 358 for point
b. At the local minima, the operating points of interest are
b and
c, shown in
Figure 7, because at
c the rotational speed is lower than at
b, though at
c the wind speed is higher than that at
b:
The positioning of the operating points was performed based on the coordinates of these points: ω (MAV) and power at the EG. The following conclusions can be drawn from the positioning of the operating points:
Points B, D, E, F, and b can be MPPs, but this cannot be stated with certainty, as the exact coordinates of the points, ωOPTIM and PWT-MAX, are not known;
Points A, C, and c cannot be MPPs, because their speeds are above the optimum values, nOPTIM;
The dependence of the optimal wind turbine speed on the wind speed is not a linear function, nOPTIM = kV; as a result of the MM-WT, it depends on many factors;
The MPP coordinates, ωOPTIM and PWT–MAX, can only be determined by running the WT in the area ∆ω = (0.9–1.1) · ωOPTIM, passing through the MPP.
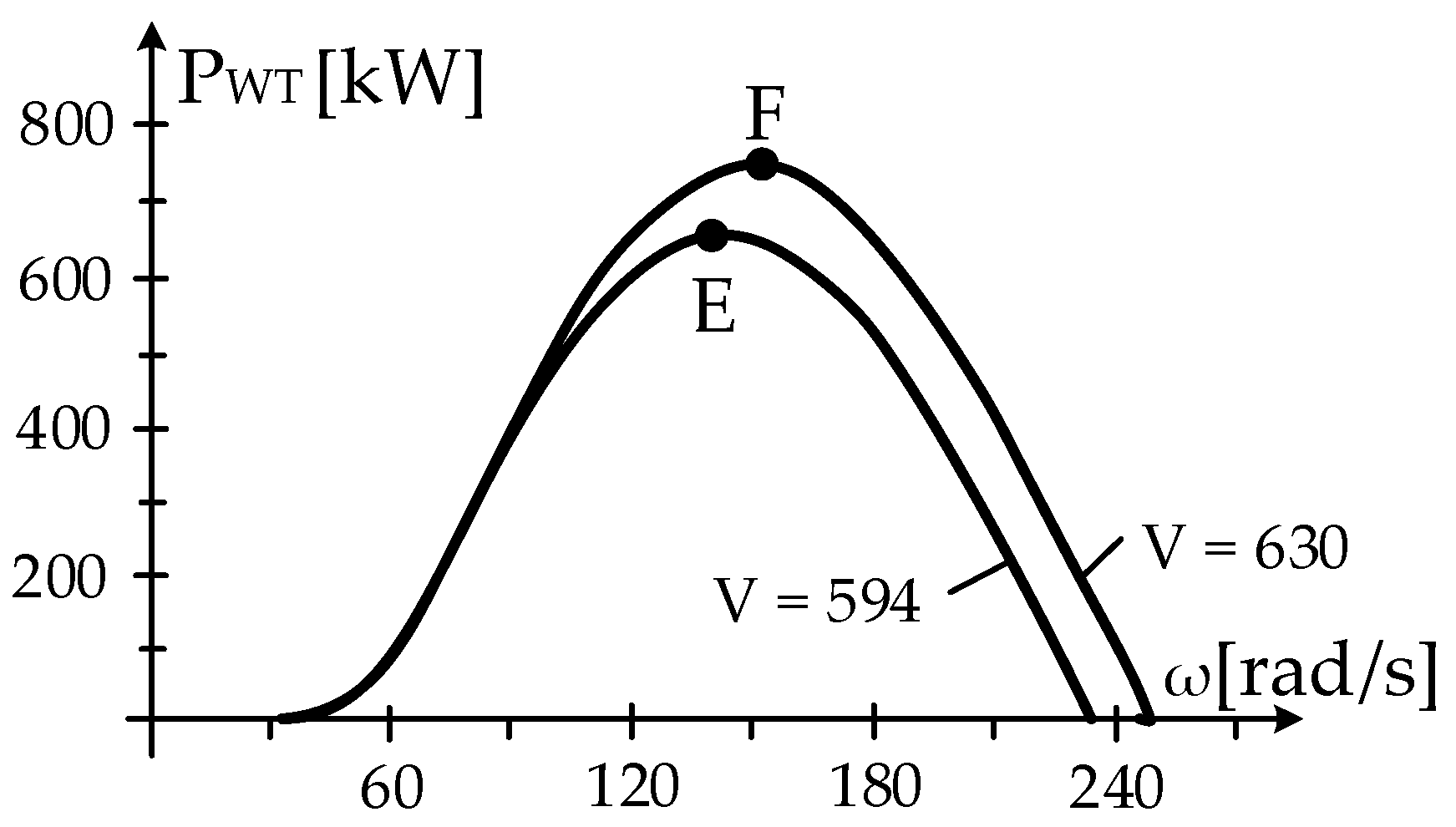
The operating points E and F can be MPPs because their coordinates are
Point of operation
F:
which are probably equal to the optimum, as illustrated in
Figure 8.
Further, with regard to the WT power characteristic, the function PWT(ω) changes significantly with time and at varying wind speeds, and for high values of the equivalent moment of inertia J, it is difficult to determine the MPP coordinates. The results obtained are useful in determining the mathematical model for the WT.
5. Mathematical Model of the Turbine
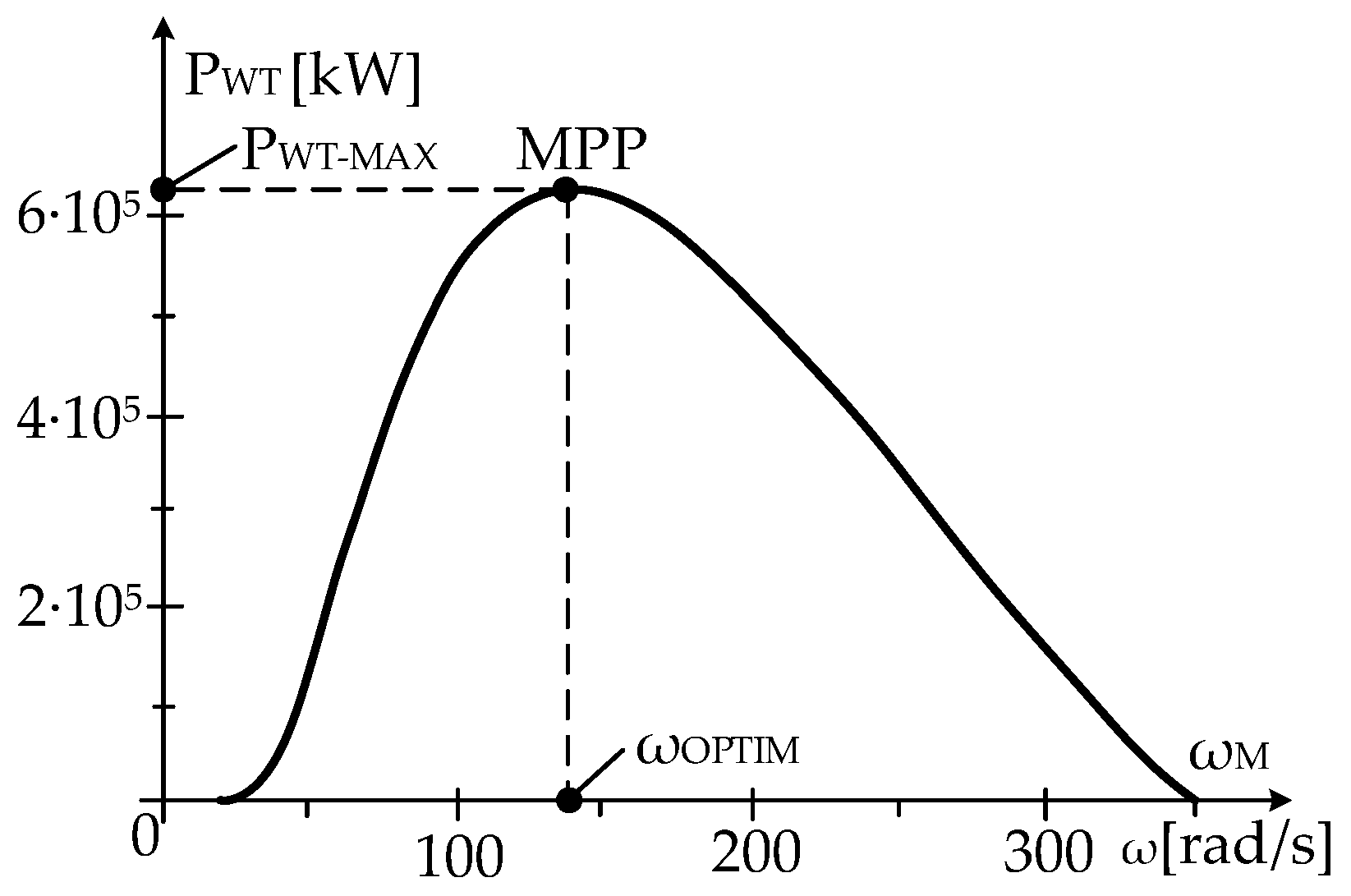
Based on the time records of the fundamental parameters of wind speed, v, and rotational speed and power at the EG, the MM-WT can be determined; a model that is particularly important both for the optimal control of wind power plants and for the estimation of their performance under high temporal wind speed variations. The mathematical model for a WT at wind speed v is embodied in the WT power characteristic function, PWT(ω,v).
The maximum of the
PWT(
ω,v) function is at the point of maximum power, MPP (
Figure 9), whose coordinate points are given by the optimum mechanical angular velocity,
ωOPTIM, and the maximum power,
PWT–MAX.
In the idle operation of the WT, the mechanical angular velocity has the maximum value, ωM. In the control design, the MPP area and knowledge of the dependence of the optimal mechanical angular velocity, ωOPTIM, on the wind speed are essential. This fundamental problem is addressed in this paper.
This MM-WT can be updated in real-time to ensure maximum wind energy capture. The mathematical model of the wind turbine determines the optimum speed as a function of the wind speed. Various forms of the WT power curve, the
PWT(
ω,v) function, have been given in the literature [
18,
19,
20,
21,
22,
23,
31].
The most useful case is that with three parameters–
a,
b, and
c—with the form:
Parameters a, b, and c are determined by measuring the following: the wind speed, v, the power flow, PEG, and the rotation speed/mechanical angular velocity at EG, n/ω.
The coordinates of the maximum power points, MPPs, are obtained from
or
with the solution
and maximum power:
The maximum value of VUM,
ωM, is at
PWT = 0, resulting in
It is known from the literature [
18,
19,
20,
23,
36,
37] that the value of the ratio
ωOPTIM/
ωM is
which gives the value of the product
b · c:
With this value we obtain
At operating points
B,
D,
E,
F, and
b, which can be MPPs, the values of the ratios
a/
c =
x are
When operating in an MPP, the values of the a/c reports should be the same, but, if they are not equal at those points, the captured wind energy is not at a maximum and, hence, some operating points are not MPPs.
5.1. First Case Study
For the determination of the MM-WT, the operating point D is chosen as the MPP, although this cannot be stated with certainty, as the coordinates of this point are not known exactly.
At operating point
D, the wind speed, speed, and power have values of
v = 586 [cm/s],
n = 1321.75 [rot/min], and
PEG = 628.65 [kW], from which it follows that
and we obtain
With this data, the WT power characteristic, the function
PWT (
ω,
v), becomes
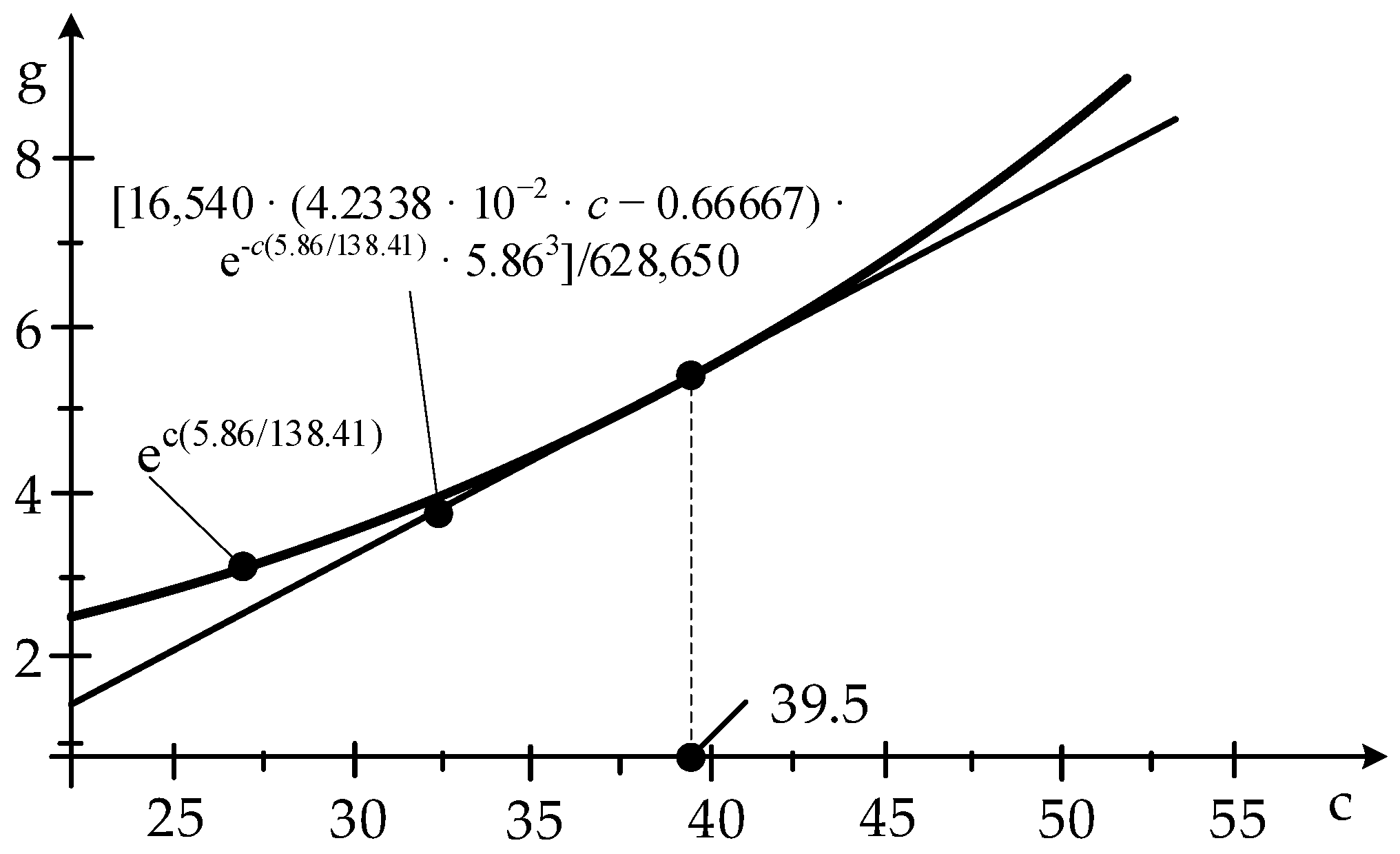
From this equation, the parameter
c is determined as follows:
The value of parameter
c is obtained from the intersection of the two graphs (
Figure 10) and is
c = 39.5.
From
bc follows the value of parameter
b:
When
a/
c = 16,540, this results in a value of parameter
a of
and, thus, the WT power characteristic, the function
PWT(
ω, 5.86), or the MM-WT, is obtained in the form:
The mathematical model of a WT at wind speed
v is expressed as follows:
Figure 11 shows the WT power characteristics, the function
PWT (
ω,
v).
From the analysis of the WT power characteristics given above, it appears that there are large differences between the measured and the corresponding MPPs, PWT–MAX.
At operating points
A,
C, and
b, a paradoxical situation occurs: the power given by the WT is higher than the maximum value,
PWT–MAX, which invalidates the MM-WT deduced from the data at operating point
D. It seems that the MM-WT cannot be applied over the whole range of wind speeds, because in the low-speed range
and large differences occur between the measured powers and the corresponding MPPs, compared to the area of higher speeds
where the differences in power are smaller.
To eliminate this paradoxical situation at operating point A, the MM-WT is recalculated.
5.2. Recalculation of MM-WT
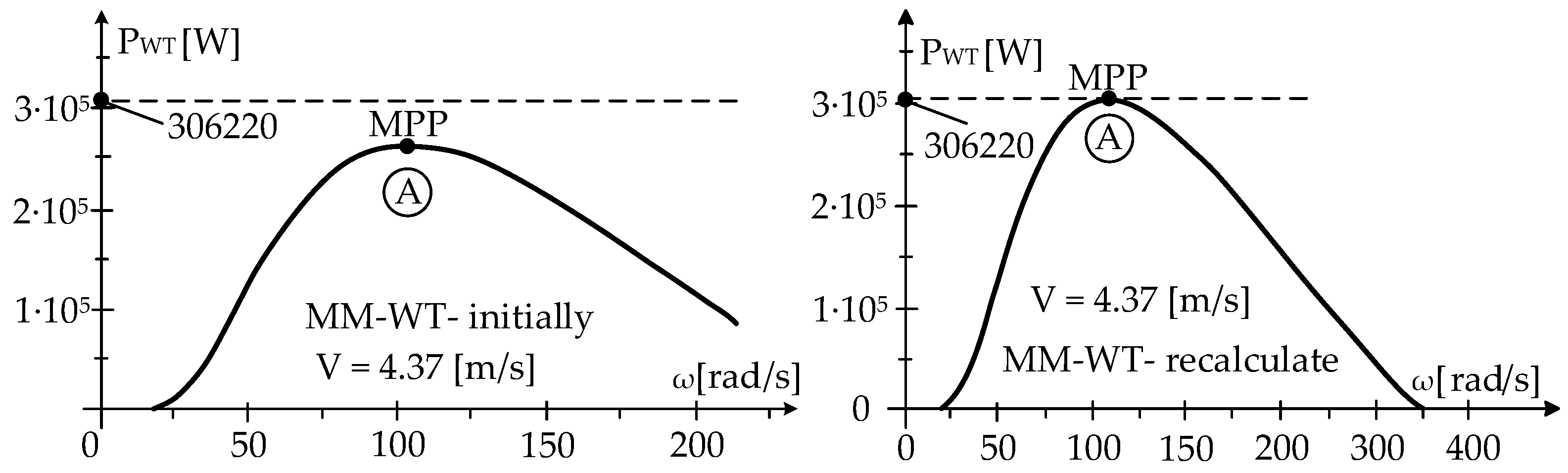
The MM-WT recalculation is performed with data from operating point—A—MM-WT-recalculated-1.
At operating point
A, the wind speed, speed, and power have values of
v = 437 [cm/s],
n = 1033.33 [rot/min], and
PEG = 306,220 [W], from which it follows that
and we obtain
With this data, the WT power characteristic, the function
PWT (
ω,
v), becomes
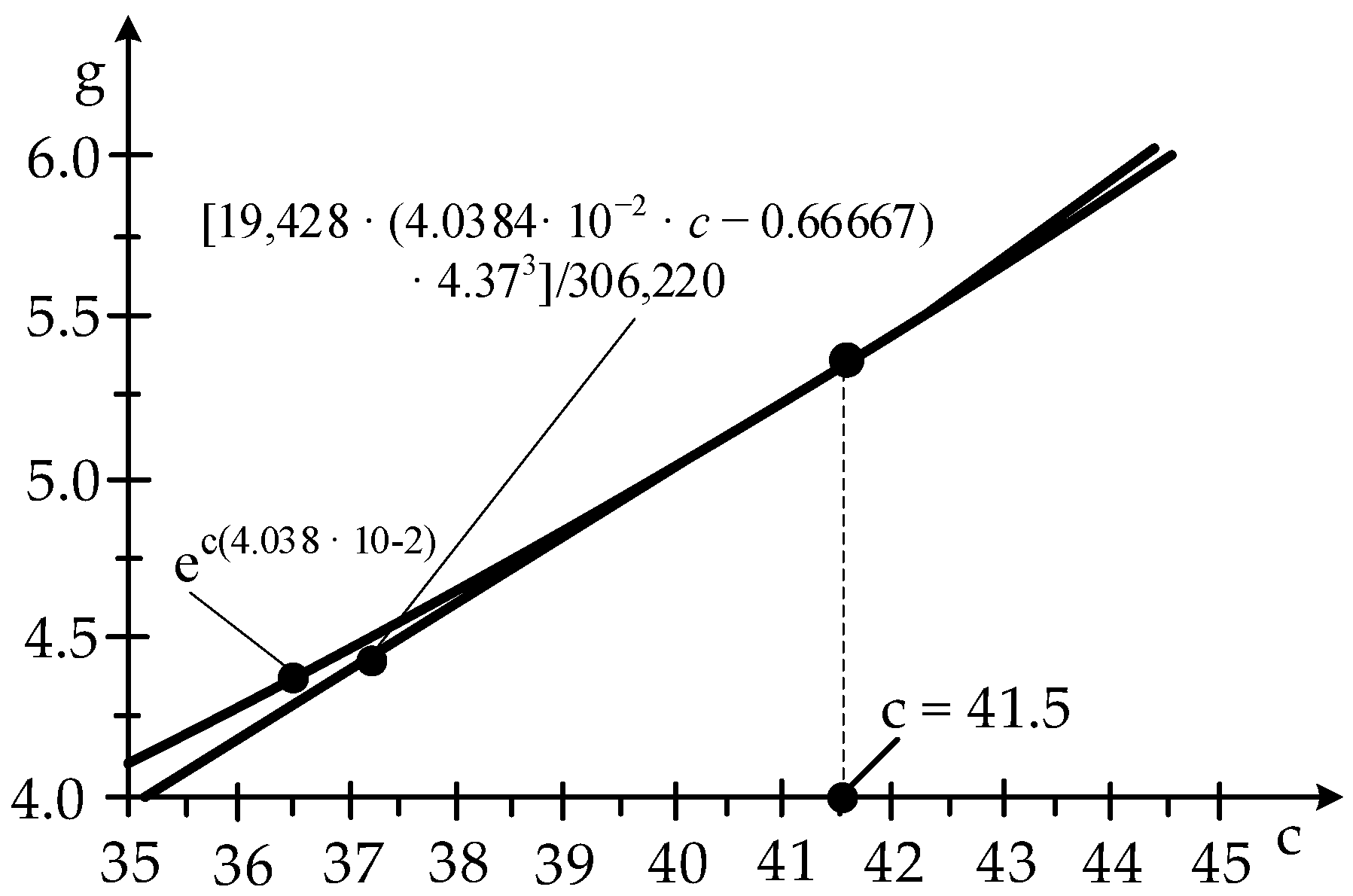
From this equation, the parameter
c is determined as follows:
The value of parameter
c is obtained from the intersection of the two graphs (
Figure 12) and is
c = 41.5.
From
bc results the value of parameter
b:
When
a/
c = 19,428, this results in a value of parameter
a of
and, thus, the WT power characteristic, the function
PWT(
ω, 4.37), or the MM-WT-recalculated-1, has the form:
With this form of the MM-WT, operating point—
A becomes the MPP, as shown in
Figure 13.
This form of the MM-WT, derived from the data from operating point
A, is closer to reality, but it cannot be said with certainty that operating point
A is the MPP. It can, however, be stated with certainty that the operating points
B,
D,
a,
c,
d,
e, and f in
Figure 11 are not the MPP. Other points could be chosen, apart from operating point
A, for the MM-WT deduction, but these points, however, must have a measured power value,
PWT-MES, greater than or equal to the maximum,
PWT–MAX:
The mathematical model of the WT, recalculated at wind speed
v, is as follows:
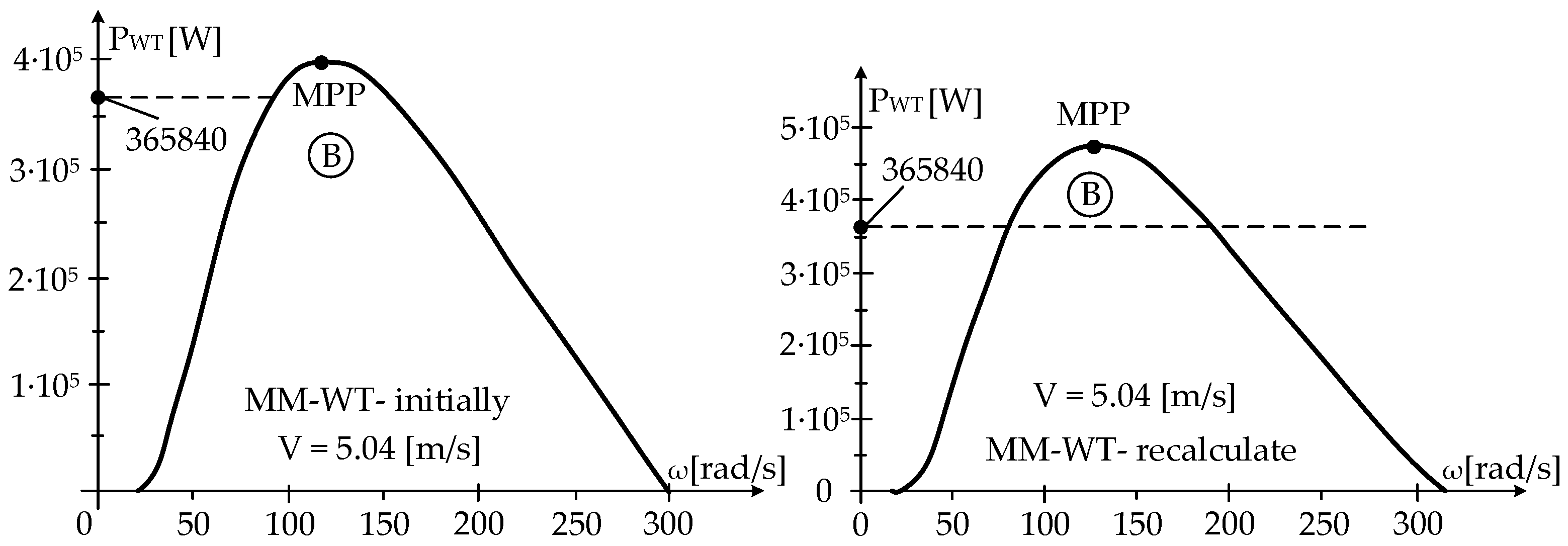
5.3. Comparison of the Two MM-WTs
Comparing these two MM-WTs, it can be seen from
Figure 14 that the calculated MM-WT operating point
B is further away from the MPP than that in the original MM-WT.
Not only by comparing the WT power characteristics graphs, shown in
Figure 14, can one assert this, but also by calculations based on the previous results:
At operating point B, the wind speed has a value v = 5.04 [m/s], and we obtain the following:
The power differences between the maximum values, calculated as the follow-ups PWT–MAX–INITIAL and PWT–MAX–RECALCULATED–1, and the measured value at operating point B, PWT-MES-B = 365,840 [W], are as follows:
So, this calculation also confirms that
B is not an operating point in the MPP. The power loss at operating point
B is large:
This form of the MM-WT, deduced based on data from operating point
A, is closer to reality, but it cannot be stated with certainty that operating point
A is the MPP. It can be stated with certainty that operating points
C,
D,
a,
c,
d,
e, and
f in
Figure 11 are not the MPP.
A, for the MM-WT deduction, has points which, however, must have a measured power value,
PWT-MES, greater than or equal to the maximum,
PWT–MAX:
5.4. The MM-WT Recalculation in the Low-Speed Zone
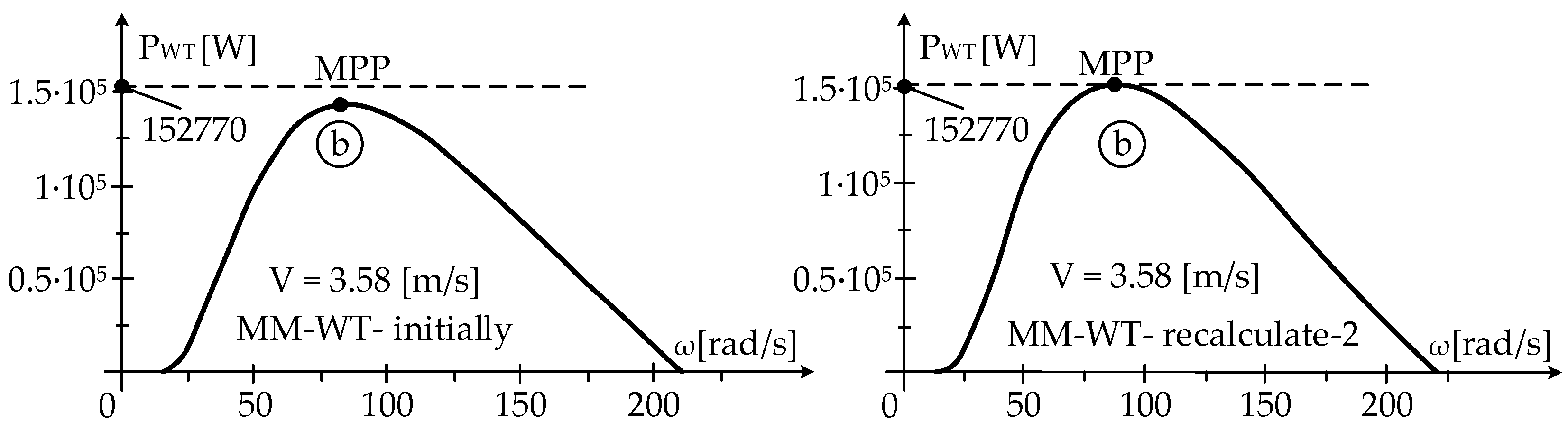
In the range of low wind speeds, 3 [m/s], where the differences between the performances are large, a recalculation of the MM-WT is also required. The MM-WT recalculation is performed with data from operating point b MM-WT-recalculated-2. At operating point
b, the wind speed, speed, and power have values of
v = 3.58 [m/s],
n = 833.87 [rot/min], and
PEG = 152,770 [W], from which it follows that
and we obtain
The WT power feature becomes
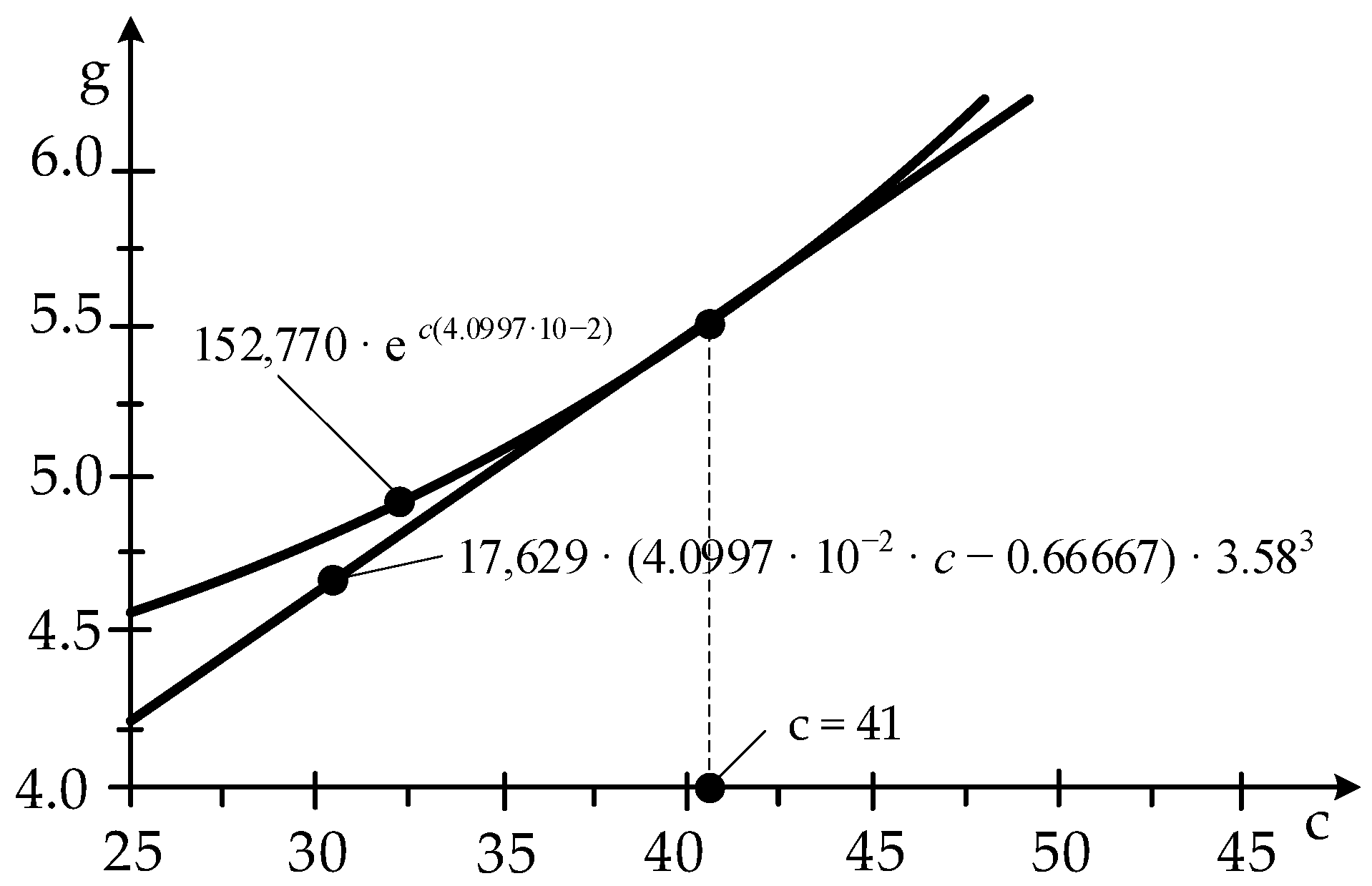
From this equation, the parameter
c is determined by
according to the two graphs in
Figure 15, resulting in
c = 41.
From
b · c results the value of parameter
b:
When
a/
c = 17,629, this results in a value of parameter
a of
and, thus, the WT power characteristic, the function
PWT (
ω, 3.58), or the MM-WT-recalculated-2, has the form:
The mathematical model of the WT at wind speed
v is expressed as follows:
Operating point b, with this form of the MM-WT, becomes the MPP (
Figure 16).
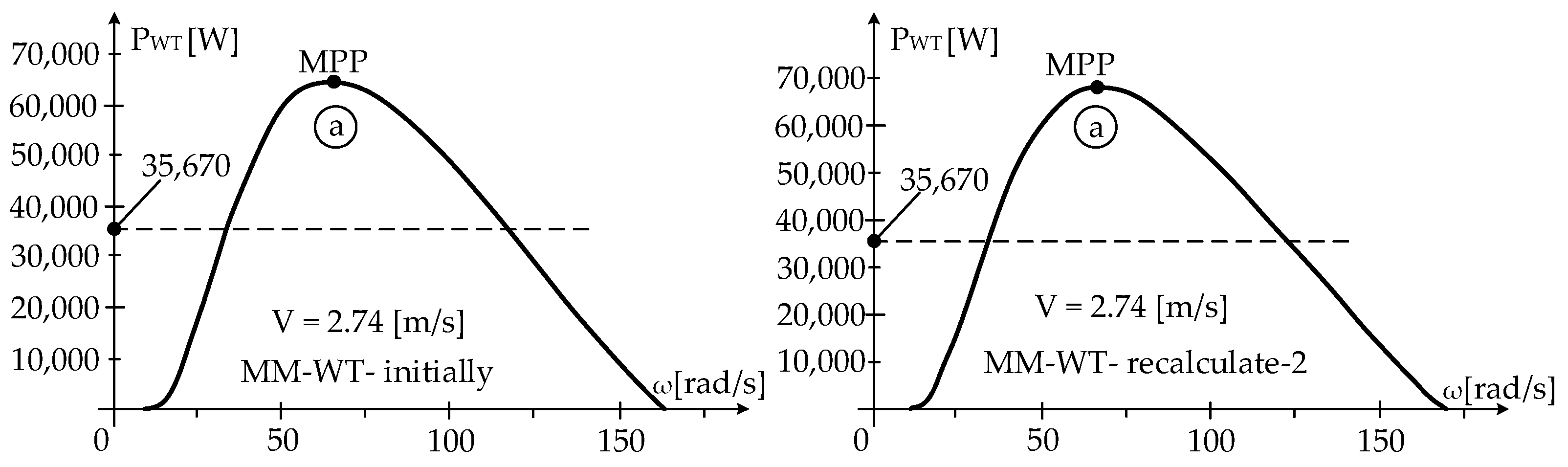
Further analyzing operating point-
a, it can be seen from
Figure 17 that the power difference between the measured value,
PWT-MES-a, and the maximum value,
PWT–MAX, is increased in the MM-WT-recalculated-2 version compared to the MM-WT-initial. At operating point-
a-, the wind speed has a value
v = 2.74 [m/s]. Operating point a is further away from the MPP in the MM-WT-recalculated-2 version.
This can also be stated by calculations, as follows:
The power differences between the maximum values, PWT–MAX– INITIAL and PWT–MAX– RECALCULATED–2, and the measured value at operating point a are PWT-MES-a = 35,670 [W]. This can also be expressed as follows:
It is confirmed that operating point
a not is the MPP. The power loss, ∆
P, at operating point
a is very high:
In reality, at the point of operation, the power loss is higher and can exceed 50%, so only half of the wind energy is captured that could be captured at MPP operation, at aOPTIM. With this data, an algorithm can be constructed to determine the power losses occurring in wind power systems operating at time-varying wind speeds.
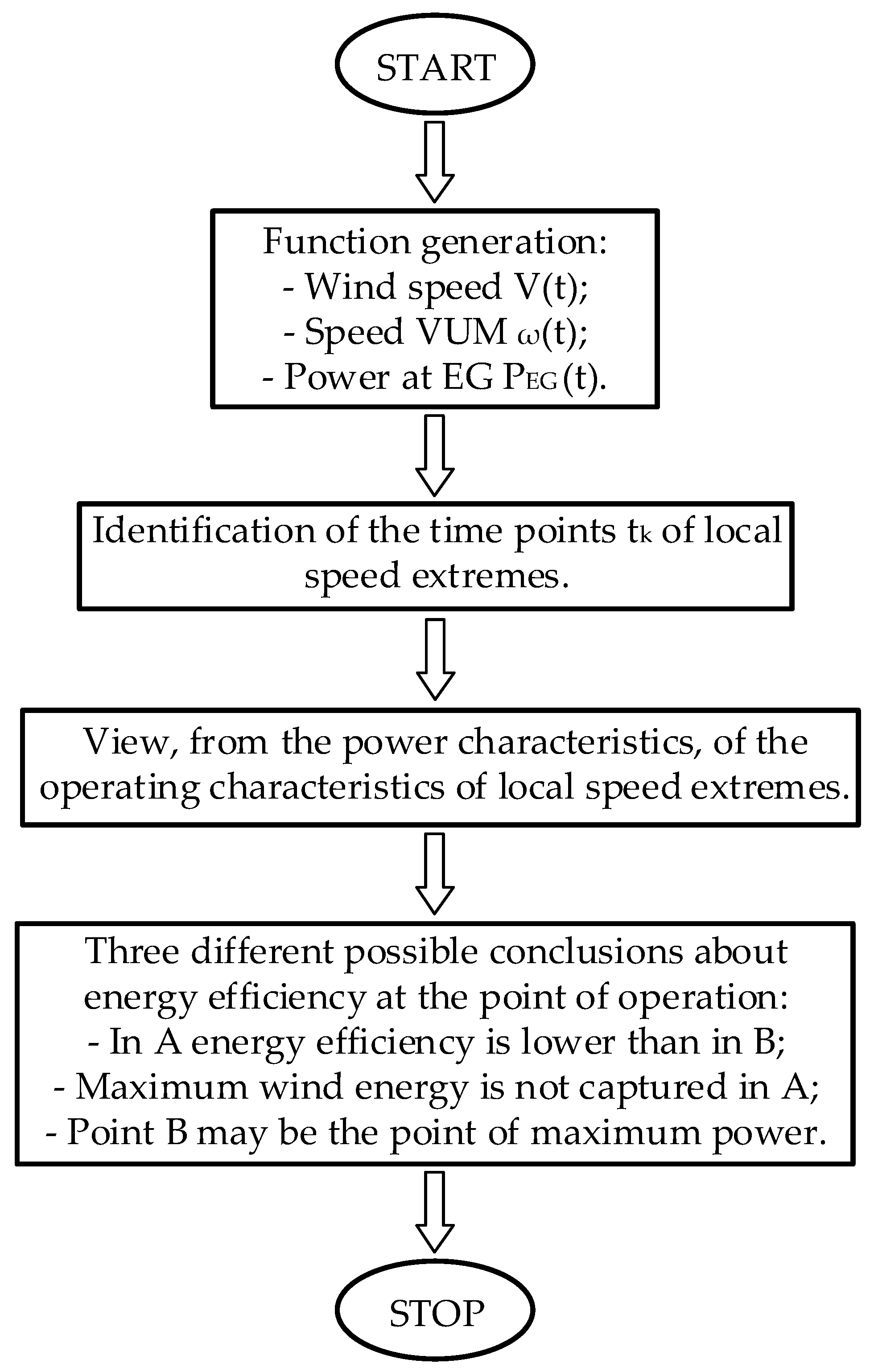
6. Algorithm for Determining Power Losses
The algorithm for visualizing the optimal energy zone consists of four steps. The first step is to collect the experimental data by recording the wind speed, power, and generator speed. In the second step, the time moments, tks, at which the speed, the function ω(t), has local extremes are identified and the turbine power is calculated. The third step is to extract from the experimental data the values for wind speed (v1), and optimal MAV (ωOPTIM), at time tk. Finally, in step four, the conclusions about the power losses at the analyzed operating points are mentioned.
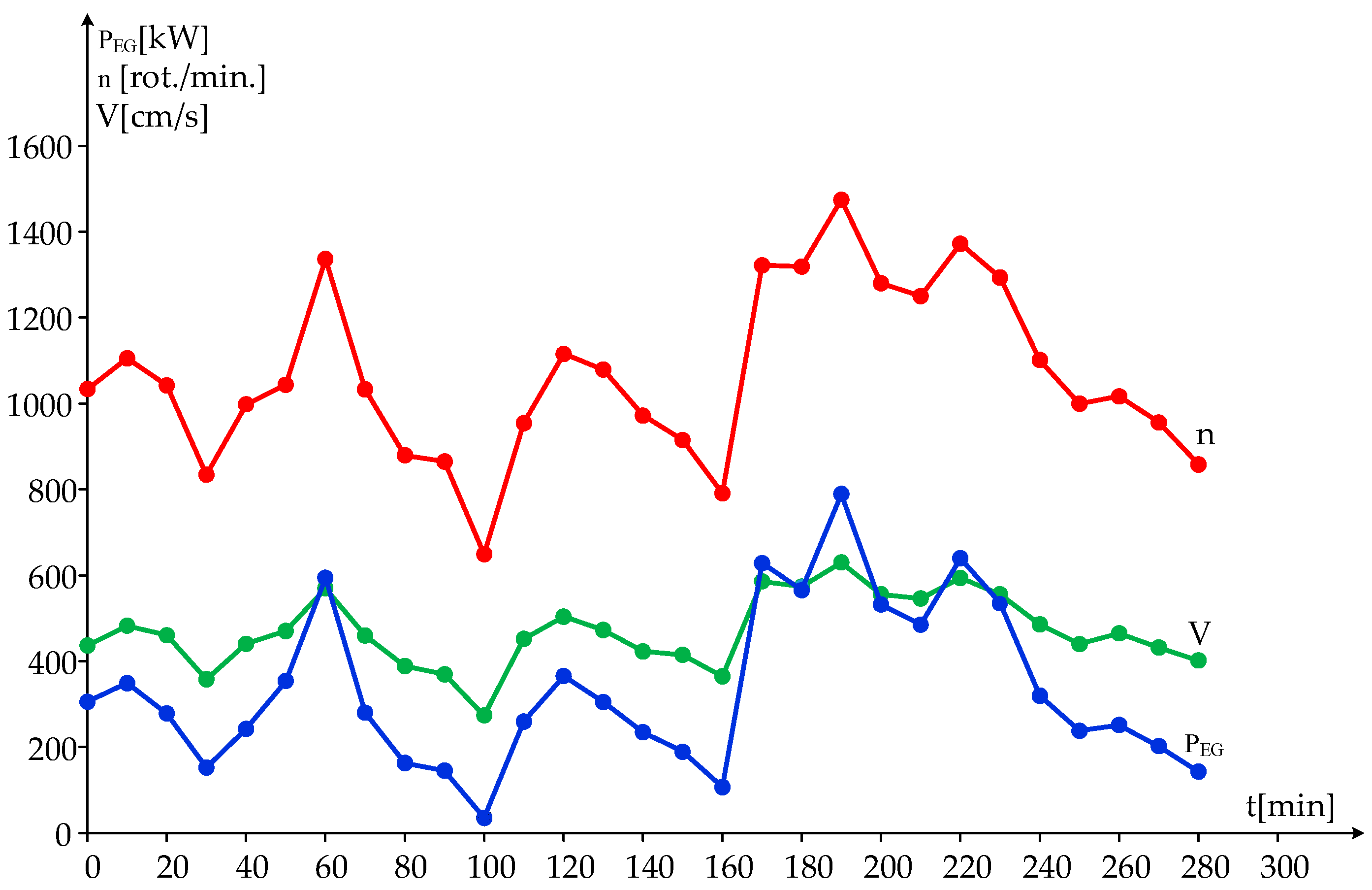
Figure 18.
Time variation in wind speed, rotation speed, and power of electric generator.
Figure 18.
Time variation in wind speed, rotation speed, and power of electric generator.
Figure 19.
Identification of local speed extremes.
Figure 19.
Identification of local speed extremes.
Figure 20.
Operating points defined by local extremes A and B.
Figure 20.
Operating points defined by local extremes A and B.
For example, only one of the following conclusions about the energy efficiency at the point of operation may be true:
In A, the energy efficiency is lower than in B;
In A, no maximum wind energy is captured;
Point B may be the point of maximum power.
Figure 21 shows the algorithm used to determine the loss of power.
7. Discussion of the Findings
7.1. Operating Results
The results of this study are as follows:
The local extremes of the speed, or the function ω(t), are obtained simply by recording the speed over time at a sampling step, ∆t, dependent on the value of the speed derivative of the wind, dv/dt, and the value of the moment of inertia, J;
For the design of the control system, it is essential to know the exact dependence of the optimal MAV, ωOPTIM, on the wind speed, v. This is easily determined from the mathematical model of the WT;
The results obtained are used to determine the mathematical model of the WT, a useful model in control design;
The visualization of the operating points makes it possible to estimate the power losses due to the incorrect value of the reference variable, ωOPTIM, in the control system;
In reality, the power losses are higher than the calculated ones, more than 48% (the value previously obtained from the existing experimental data). In the calculations, some operating points are considered as MPPs, which cannot be verified due to the lack of a wider range of speed values at the same wind speed value;
On the power function graph, PWT(ω, v), the operating points are located, and compared to the maximum power points, MPPs.
7.2. Fundamental Aspects
Through this study, the following relevant aspects can be highlighted:
7.3. Main Parameters and Selection Criteria
The analysis of the operating points defined by the local extremes of speed is characterized by the following:
- 1.
The zero value of the derivative of the mechanical angular velocity, dω/dt;
- 2.
The simplified form of the momentum equation
- 3.
The WT’s power equality with the EG in dynamic mode
- 4.
It is not necessary to know the value of the equivalent moment of inertia, J, as the power given by the WT is equal to the power from the EG (which is obtained from the power delivered to the grid by dividing by the EG efficiency value).
The method presented provides the basis for a control system with reference measurements updated in real-time, which is particularly useful for capturing maximum wind energy, a method that does not exist in the literature.
In control design, the use of an incorrect value for the reference variable no longer ensures operation in the optimal MPP range, which is defined by the correct values for the reference variable to ensure the operation of the wind turbines in the MPP range.
The optimal parameter values are visualized during the operation of the wind turbine.
For a clear view of the maximum power, the initial prescribed value of the generator power, PEG, must be much lower than the maximum value of the WT power, PMAX, and the value of the wind speed at the initial time, v0.
In physical systems with fixed power maxima over time (e.g., wind power systems operating at v = const.), it is not necessary to know the exact dependence of the optimal MAV, ωOPTIM, on the wind speed and the Perturb and Observe Method, POM, can be applied.
In wind power systems operating at time-varying wind speeds, v ≠ const, the optimal MAV value changes over time, and due to the large mechanical inertia (large moment of inertia) the POM cannot be applied.
To obtain the most accurate view of the local extremes of the speed, the value of the sampling step, ∆t, should be as small as possible.
In conclusion, by estimating the wind speed and speed values at the electrical generator at a well-defined sampling step, ∆t, and at an initial MAV value, ω(0), below the optimal MAV value corresponding to the wind speed, the maximum power point of the WT can be identified.
In the present paper, the authors analyzed the variation in the wind speed at a wind turbine—a GE 2.5 MW 100— at Galbiori in the Dobrogea area, for which they recalculated the mathematical model based on the experimental data. Also, the dependence of the optimal mechanical angular speed on the wind speed—a reference quantity in the WT control system—was computed to achieve maximum wind energy capture. The optimal mechanical angular velocity was determined in the context of the dependence between maximum power and wind speed, and their time variations were compared with the real ones. The operating points resulting from the measurements were positioned on the power characteristics of the wind turbine and compared with those corresponding to the maximum power points, demonstrating that in most cases, the WT does not operate in the maximum power points.
8. Conclusions
In this paper, the local speed extremes were identified, and it was shown that in most cases, wind turbines do not achieve maximum power point tracking. By visualizing the operating points on the WT power curve, the resulting power losses were estimated. A control method with reference variables updated in real-time was presented, a method that does not exist in the literature. The results obtained are based on experimental data from wind turbines on the Romanian Black Sea coast—the Dobrogea area.
The research in this field is characterized by many gaps, such as a lack of relevant works aimed at determining the dependence of the optimal mechanical angular speed on the wind speed, and data from the technical book of wind turbines, having differences in time in operation, require a recalculation of the mathematical model based on measurements from where it operates. The aim of the research in this work was precisely to eliminate these gaps, in the sense that the power conversion coefficient must always be recalculated over time because the initial conditions have changed; the ratio λ, the ratio between the speed of the ends of the blades and the speed of the wind, a reference quantity in the control system, always has to be recalculated.
By analyzing the time variations in the MAV, the extreme points of the ω(t) function could be identified. For these local extremes, the derivative of the mechanical angular velocity is zero, dω/dt = 0, and the WT power in the dynamic mode at these operating points is equal to the power from the electric generator, PWT = PEG. The operating points, positioned on the WT power characteristics, were compared with those corresponding to the maximum power points. Future research should ensure that wind turbines operate at their optimum mechanical angular velocity, at the maximum power point of the turbine, by varying the load on the electrical generator as a function of wind speed. Thus, based on the experimental data, maximum wind energy capture can be achieved even with variable wind speeds over time. Furthermore, the visualization of the optimal area from an energy point of view, to locate the operating points of the WT compared to the maximum power point, allows for a much more precise determination of the energy yield. Additionally, a reliable mathematical representation of the turbine was established, and adjusted using data collected from the operational wind turbine, a model that underwent experimental validation. Moreover, a comparison of the optimal mechanical angular speed and the current mechanical angular speed was also visualized.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}