3.1. Cumulative Prospect Theory
In 1979, Tversky and Kahneman proposed prospect theory to describe decision-making behavior in a risk environment. The expected utility theory believes that the decision-maker will evaluate alternatives by their utility (the sum of the product of probabilities and outcome values), and the prospect theory keenly discovers the subjective tendency of the decision-maker when making the choice behavior.
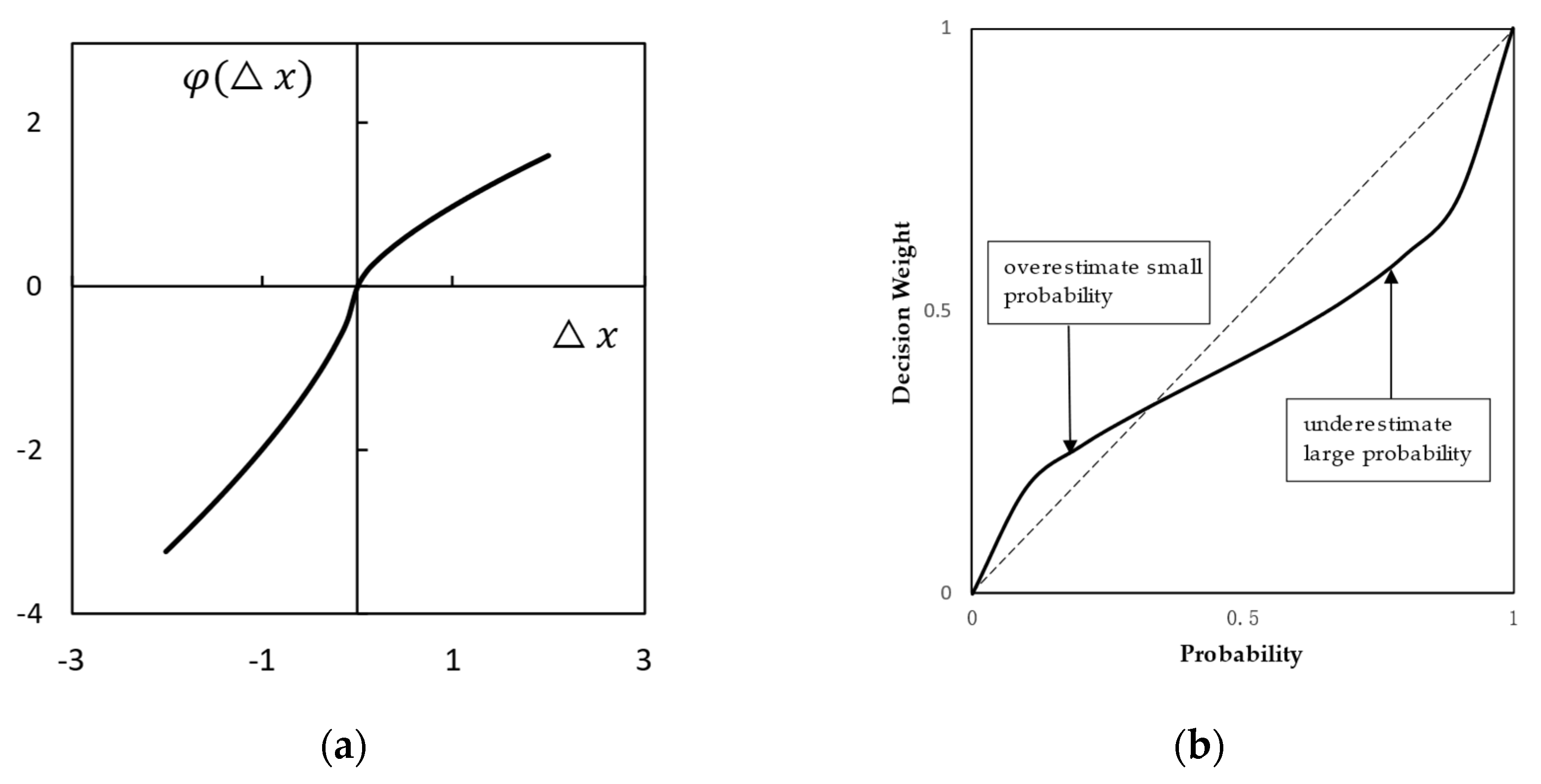
Prospect theory proposes the “reference point” and defines the gain or loss of the value relative to the reference point as the prospect value. During the experiment, the researchers found that decision-makers differed in their sensitivity to gains and losses. In view of this characteristic, prospect theory establishes different value functions for gains and losses.
Equation (1) converts the utility value
into a gain or loss compared to the reference point
. The value function, Equation (2), exhibits risk aversion to gains and risk seeking to losses.
are the risk preference parameters, and the value range is as follows:
. Larger values of
and
indicate that people are more sensitive to risk.
is larger than 1, which suggests that people are more sensitive to losses than gains. Larger values of
represent the increasing degree of sensitivity.
Figure 1a presents the value function.
At the same time, the researchers also found that decision-makers overestimate small-probability events and underestimate large-probability events. That is, the decision behavior is influenced by the decision weights, not the actual probabilities. Prospect theory establishes a probability weighting function to achieve the transition between actual probabilities and decision weights.
The probability weighting function
is defined in Equations (3) and (4).
are the probability weighting parameters, and
. The smaller
and
result in a more curved weighting function. The weighting function is shown in
Figure 1b.
In the process of modeling travel behavior, Gao [
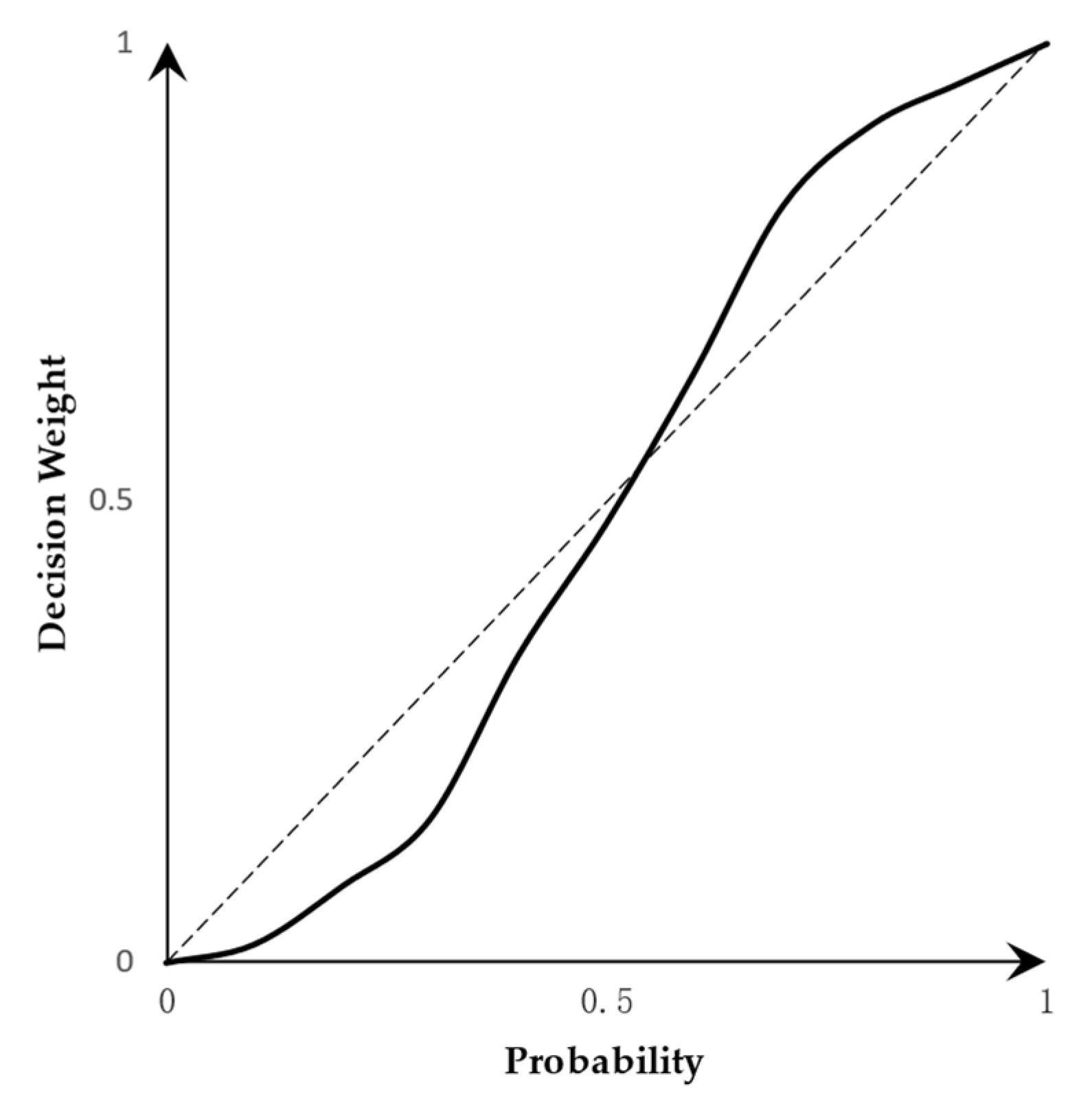
25] found that the sensitivity of travel time gains and losses is much greater than that of travel cost gains and losses. The travelers underestimate the low-probability travel time and overestimate the high-probability travel time in the commuting mode shift behavior, and the probability weighting function presents an S-shape shown in
Figure 2.
Gao found that the weighting functions of time and cost were distorted to different degrees, but he did not establish a modified weighting function. On this basis, Huang [
26] modified the value range of the probability weighting parameters
and
and introduced the discrimination parameter
to obtain the optimized time probability weight-function Equations (5) and (6).
Cumulative prospect theory, which is an extension of prospect theory, employs cumulative rather than single decision weights [
27]. The main difference between prospect theory and cumulative prospect theory is in the weighting function, where the former works with marginal probabilities while the latter uses cumulative probabilities. In the theory of cumulative prospects, the
possible outcomes of the alternatives are arranged in order from smallest to largest,
, which occur with probabilities
. The cumulative decision weights are defined as follows:
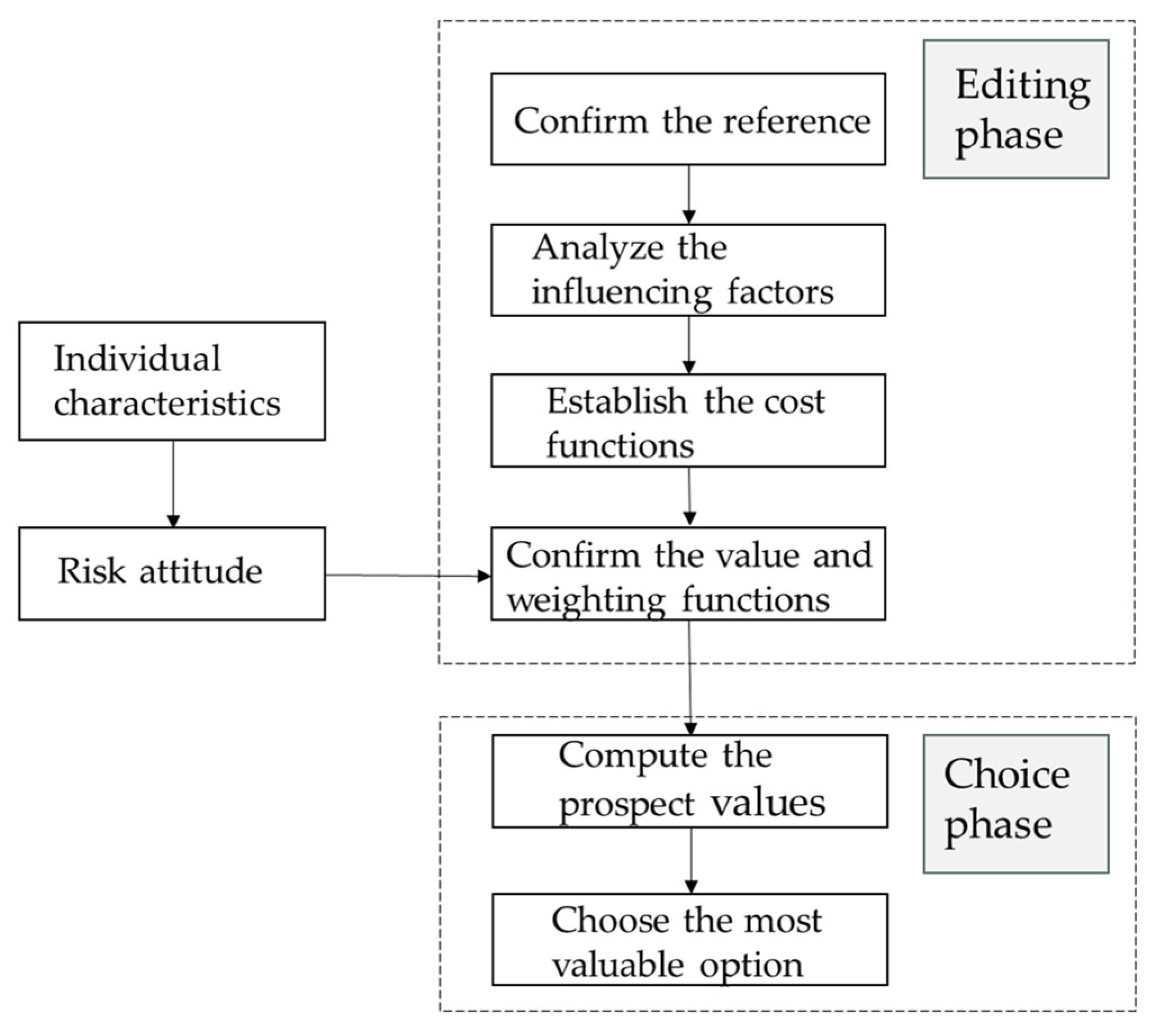
Therefore, prospect theory divides people’s decision-making process into two stages: the editing stage and the evaluation stage. In the editing phase, people rely on reference points to judge the likely outcomes of various decisions and to determine whether the resulting outcome is a gain or a loss. In the evaluation stage, various decision-making options are evaluated based on the results of the editing stage, and the decision with the highest prospect value is selected. The prospect value is calculated as follows:
3.2. Latent Class Model
Even if different drivers make the same choice in the same scenario, the reasons for their decision are different. It may be affected by parking fees, walking distance, personality or habits. The factors influencing the drivers’ choices of parking are very complex, and a general generalization of the characteristics of these factors can lead to ignoring the internal correlation between the various influencing factors. The latent class model was first proposed by Lazaesfeld and Henry, which can be used to explain the intrinsic correlation between variables [
28]. This model makes up for the shortcomings of the structural equation model in dealing with continuous latent variables and is suitable for data with mostly categorical variables.
Latent class models use intrinsic latent categorical variables to explain the relationship between explicit categorical variables. The basic assumption of the model is that the probability distribution of explicit variables can be explained by a small number of mutually exclusive latent category variables, and each category has a relative tendency to choose explicit variables.
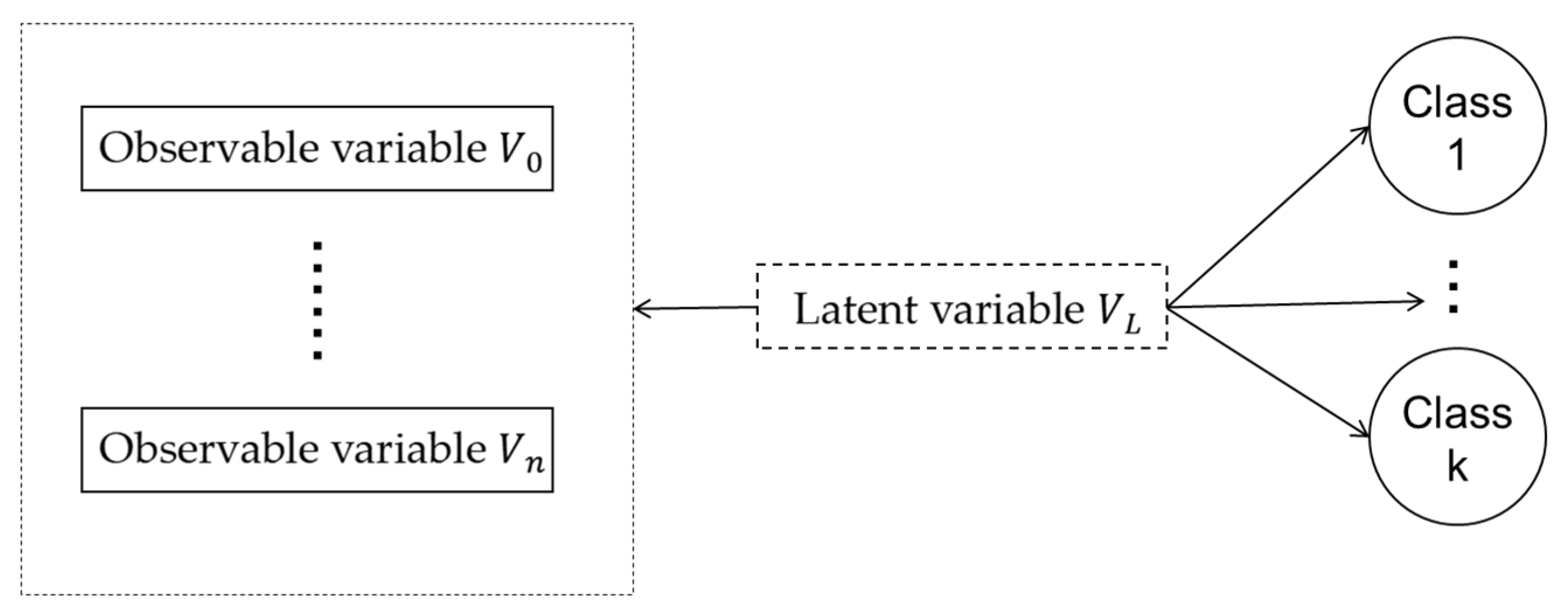
In
Figure 3, the observable variable
can be directly observed, and the latent variable
cannot be directly observed or can be observed but needs to be synthesized by other methods. Typically, one latent variable corresponds to multiple observable variables. Latent variables can be seen as abstractions and overviews of observable variables, which, in turn, are regarded as external reflection indicators of the latent variable. The latent variable is the basis for class membership in one of several latent classes. The latent class model uses latent variables to explain the relationship between observable variables, and its basic assumption is that the probability distribution of observable variables can be explained by a small number of mutually exclusive latent variables, and each class has a specific tendency to the choice of each observable variable.
The analysis process of the latent class model includes probabilistic parameterization, estimate models, determining fit and the result interpretation.
Probability parameterization is the conversion of the probability of categorical variables into parameters, which is the first step in establishing a latent category model.
Assuming that there are three explicit variables
A,
B and
C, and each variable has
I,
J and
K levels, the latent variable
X is with T latent categories. The choice behavior of each decision-maker can be represented by different combinations of levels of explicit variables. The latent class model assumes that latent variables (
X) can explain the relationship of explicit variables (
A,
B and
C) and maintain the local independence of explicit variables in each class. After probability parameterization, the latent class model is expressed as follows:
is the joint probability of the latent class model; is the probability of the latent variable X at the t level. Equation (11) means that the probabilities of each potential category add up to 1. is the conditional probability, which represents the probability that an individual belonging to the t potential category will respond to the i level of the observed variable A. Equation (12) shows that the sum of the conditional probabilities of each explicit variable is 1.
- 2.
Estimate models and determine the fit
The latent class model is mainly estimated by the maximum likelihood method. In the iterative process, the EM (-expectation-maximization) and NR (Newton Rapson) algorithms are generally used, among which the EM algorithm is the most commonly used.
In the iterative process, it is necessary to find the model with the least parameters and the best goodness-of-fit. The main methods for the goodness-of-fit test are the chi-squared statistic test of likelihood ratio, Pearson test and signal evaluation index, among which the
AIC criterion and
BIC criterion are the most commonly used signal evaluation indexes.
BIC is more reliable when the number of samples is thousands, and
AIC is used when the number of samples is small. The signal evaluation index is based on the likelihood ratio chi-square test to compare different models with different parameter restrictions. The smaller the index value is, the better the parameter fit is. In order to evaluate the goodness-of-fit of the model more comprehensively, the four indexes are usually combined.
where
LL is the log-likelihood value function calculated at the convergence for the parameter estimates;
C is the number of latent classes;
is the number of elements in the utility function of the class-specified models; and
K is the number of estimated [
29]. The values of AIC and BIC closer to 0 indicate a better fit.
- 3.
Result interpretation
After determining the optimal model through a goodness-of-fit evaluation, the observed data were matched to each latent class by probability estimation and comparison according to Bayesian theory. The posterior probability of the observed data being classified into each latent class is calculated by the formula. The maximum posterior probability of a latent class is used to classify the observed data into that class.
where,
represents the posterior probability that the observed data are classified into a latent class
t.
represents the probability that the observed data are classified into a latent class
t.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}