
Dynamic Control Method for CAV-Shared Lanes at Intersections in Mixed Traffic Flow


Abstract
1. Introduction
- (1)
- A dynamic allocation method of CAV-shared lanes is established to tap the traffic potential of CAV-dedicated lanes;
- (2)
- The method of traffic flow scheduling and CAV trajectory optimization for multilane intersections with CAV-shared lanes is constructed to improve the traffic performance;
- (3)
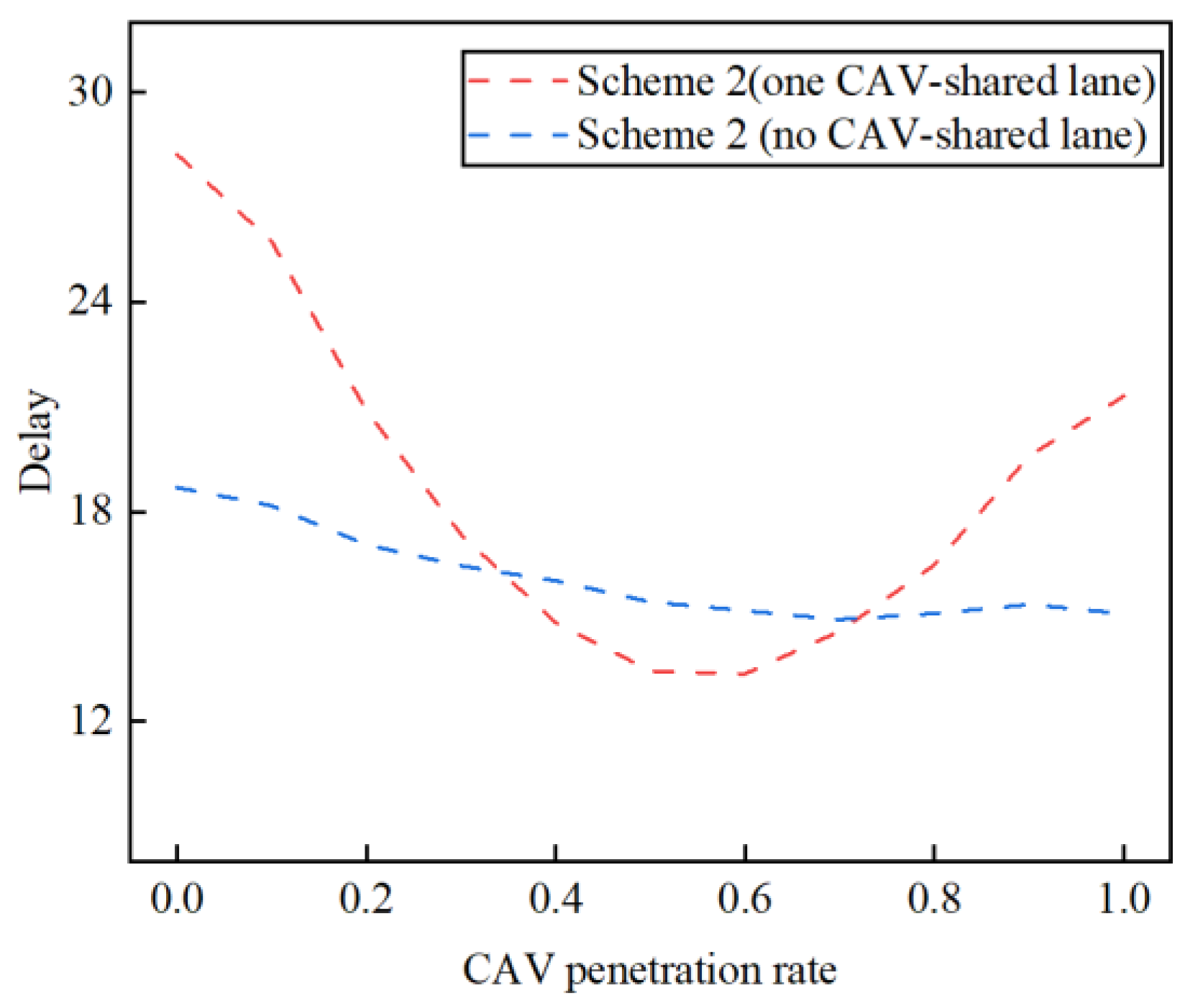
- Sensitivity analysis is conducted to verify that the number of CAV-shared lanes is closely dependent on the CAV penetration rate.
- (1)
- Promote sustainable development of transportation
- (2)
- Promote sustainable development of the environment
- (3)
- Promote sustainable development of energy
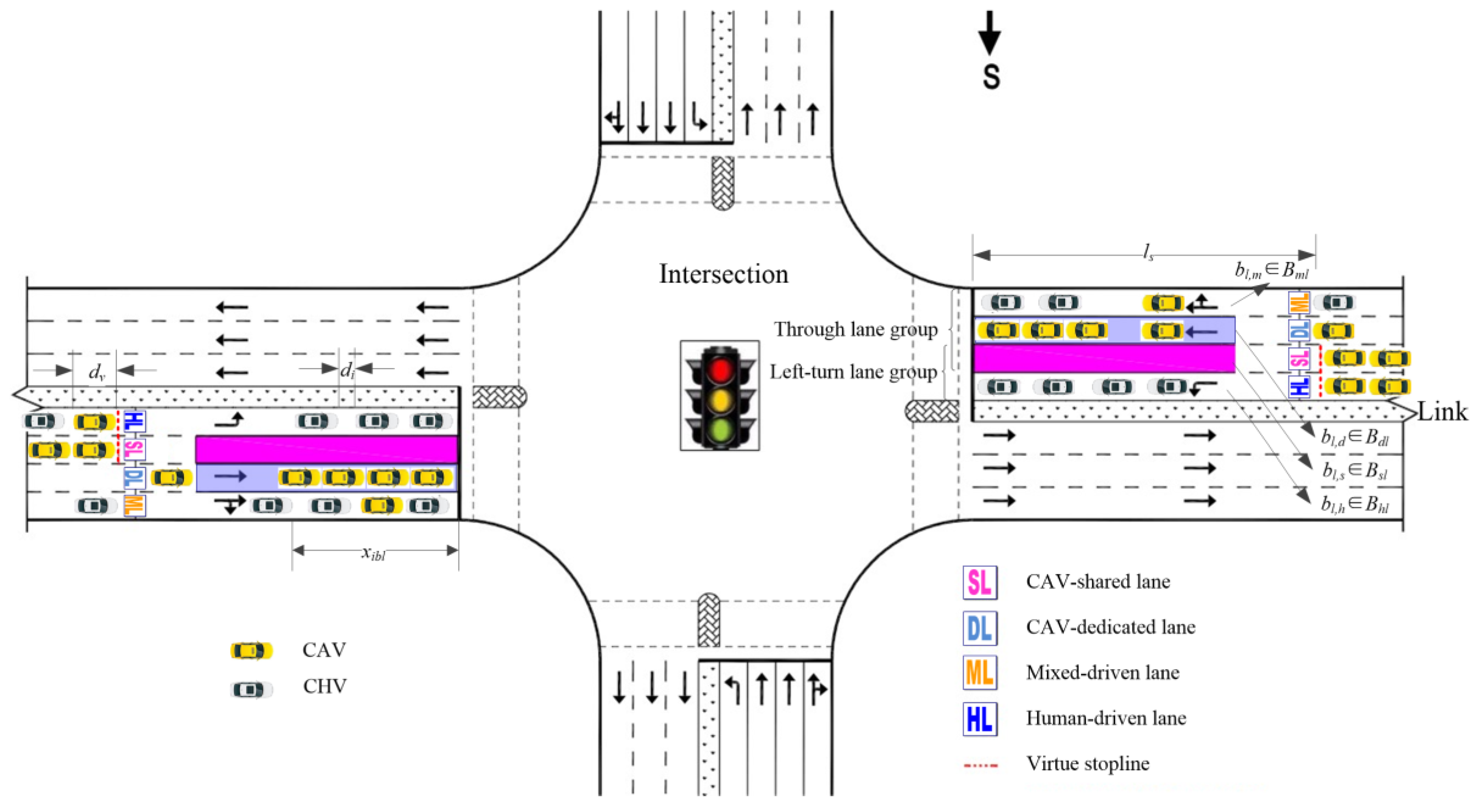
2. Problem Description and Notations
3. Method Construction
3.1. Objective Function
3.2. Dynamic Allocation Method for CAV-Shared Lanes
3.2.1. One or More CAV-Shared Lanes at Approach i
3.2.2. No CAV-Shared Lanes at Approach i
3.3. Traffic Flow Scheduling for CAV-Shared Lanes
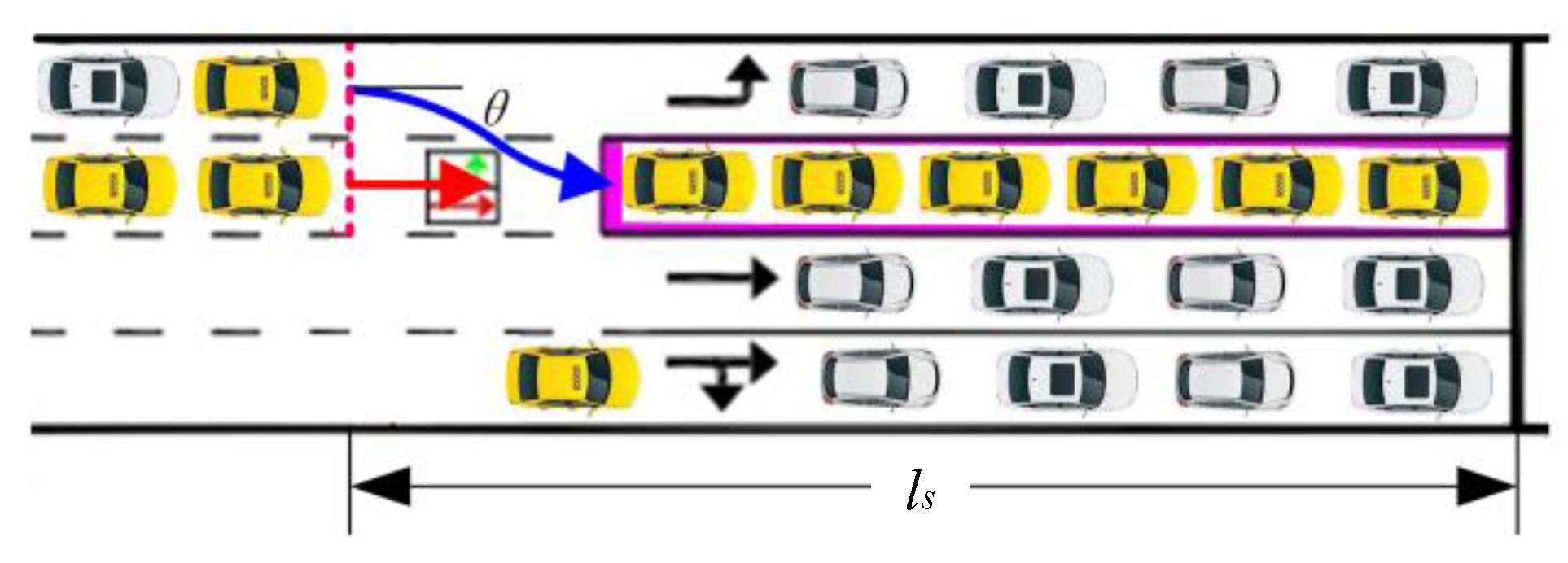
3.3.1. Dynamic Virtual Stop-Line
3.3.2. Starting and Close Times of Scheduling at the Virtual Stop-Line
- (1)
- Starting time
- (2)
- Close time
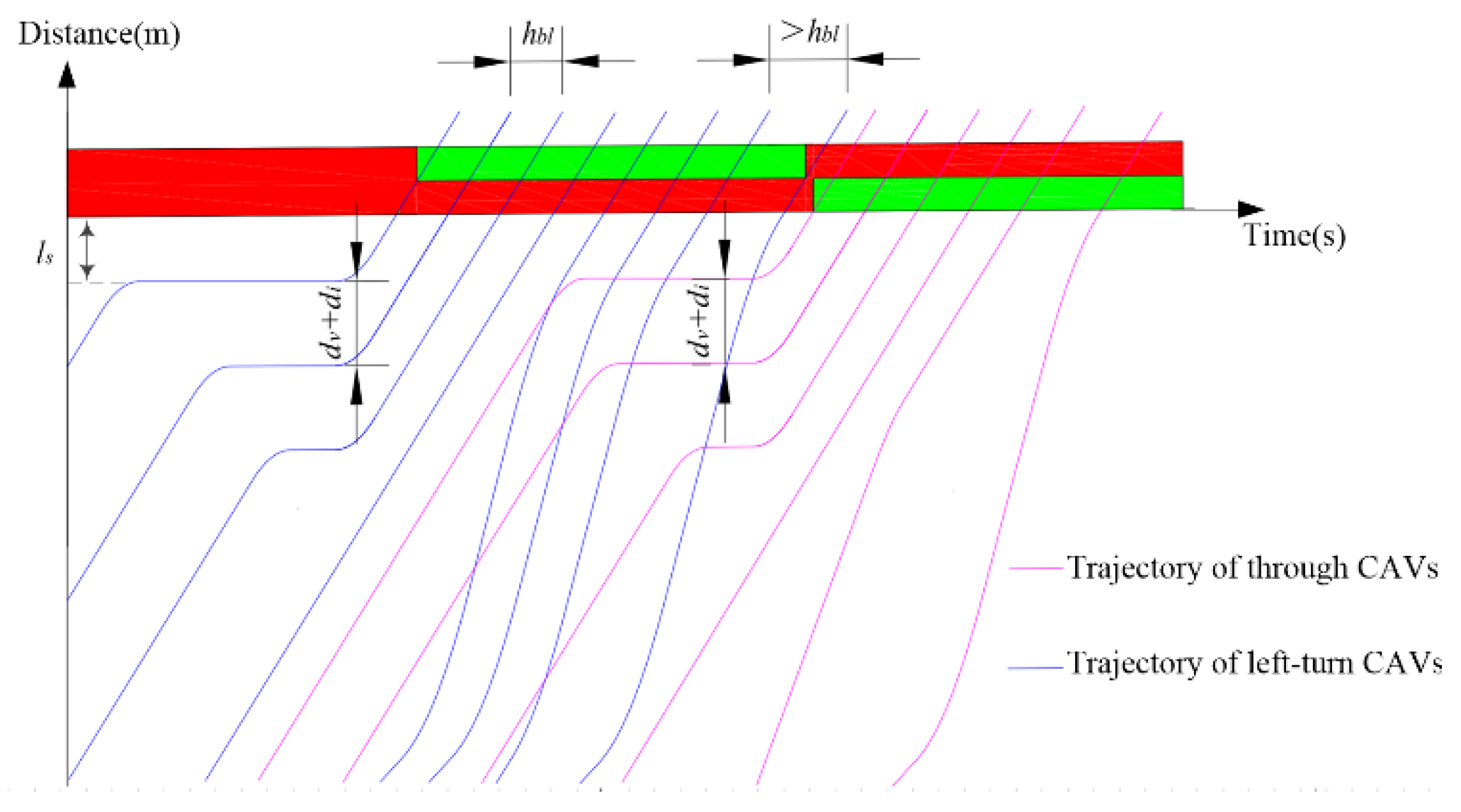
3.3.3. Platoon Division of CAVs
- (1)
- For mixed-driven lanes behind the virtual stop-line
- (2)
- For CAV-dedicated lanes behind the virtual stop-line
3.4. Trajectory Control Models
3.4.1. Trajectory Constraints
3.4.2. Trajectory Optimization Models
3.5. Solution Process of Optimization Model
4. Numerical Experiments
4.1. Basic Conditions
4.2. Simulation Scheme
5. Result and Discussion
5.1. Result Analysis
- (1)
- This clearly indicates the correct lane for CAVs and CHVs to travel, which can improve the efficiency of traffic flow, reduce delays, and ultimately enhance capacity at intersections.
- (2)
- This can effectively reduce the situation of CHVs accidentally entering CAV-shared lanes, lower the potential risk of traffic accidents, especially in mixed traffic environments, and improve the safety of pedestrians and vehicles.
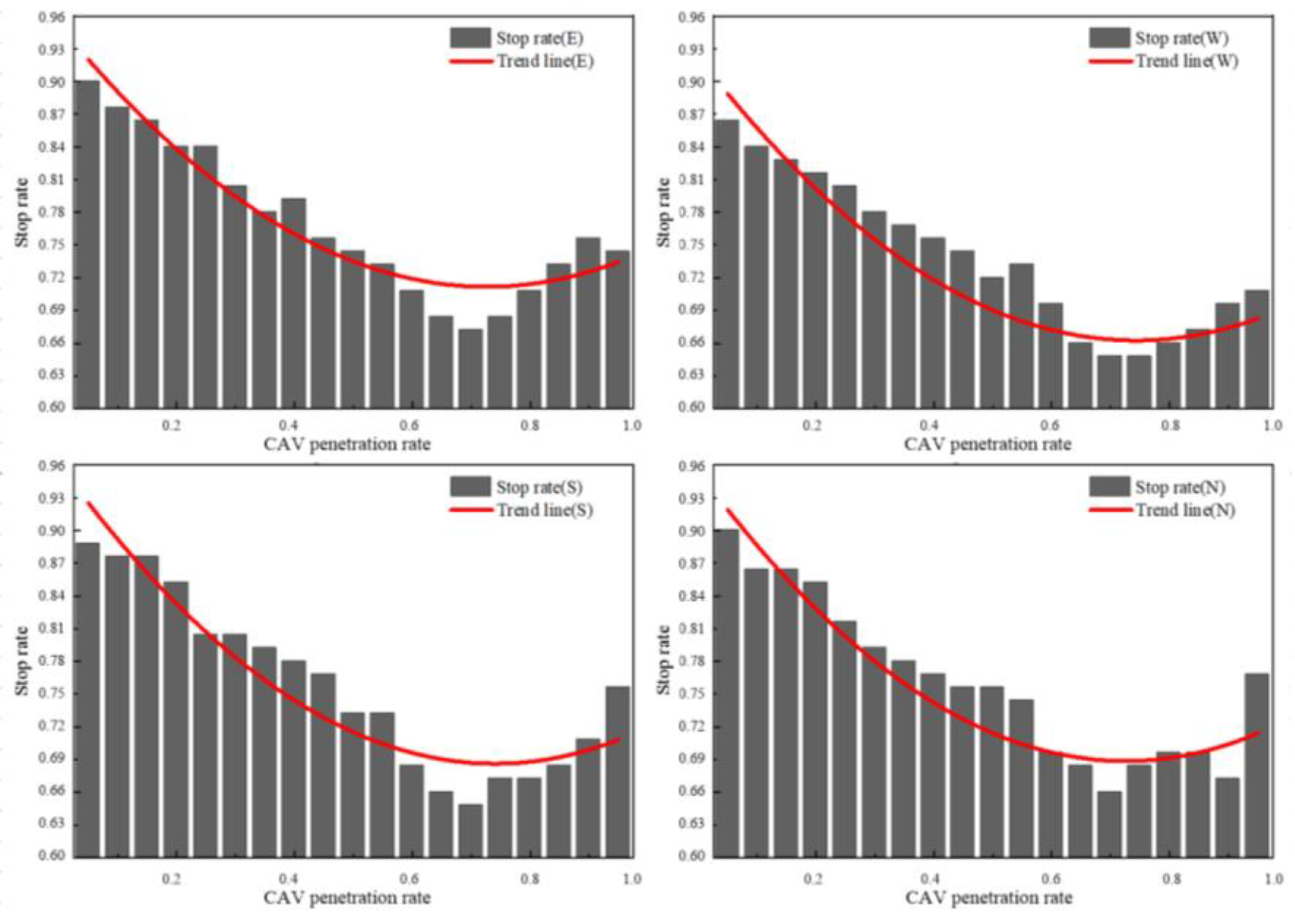
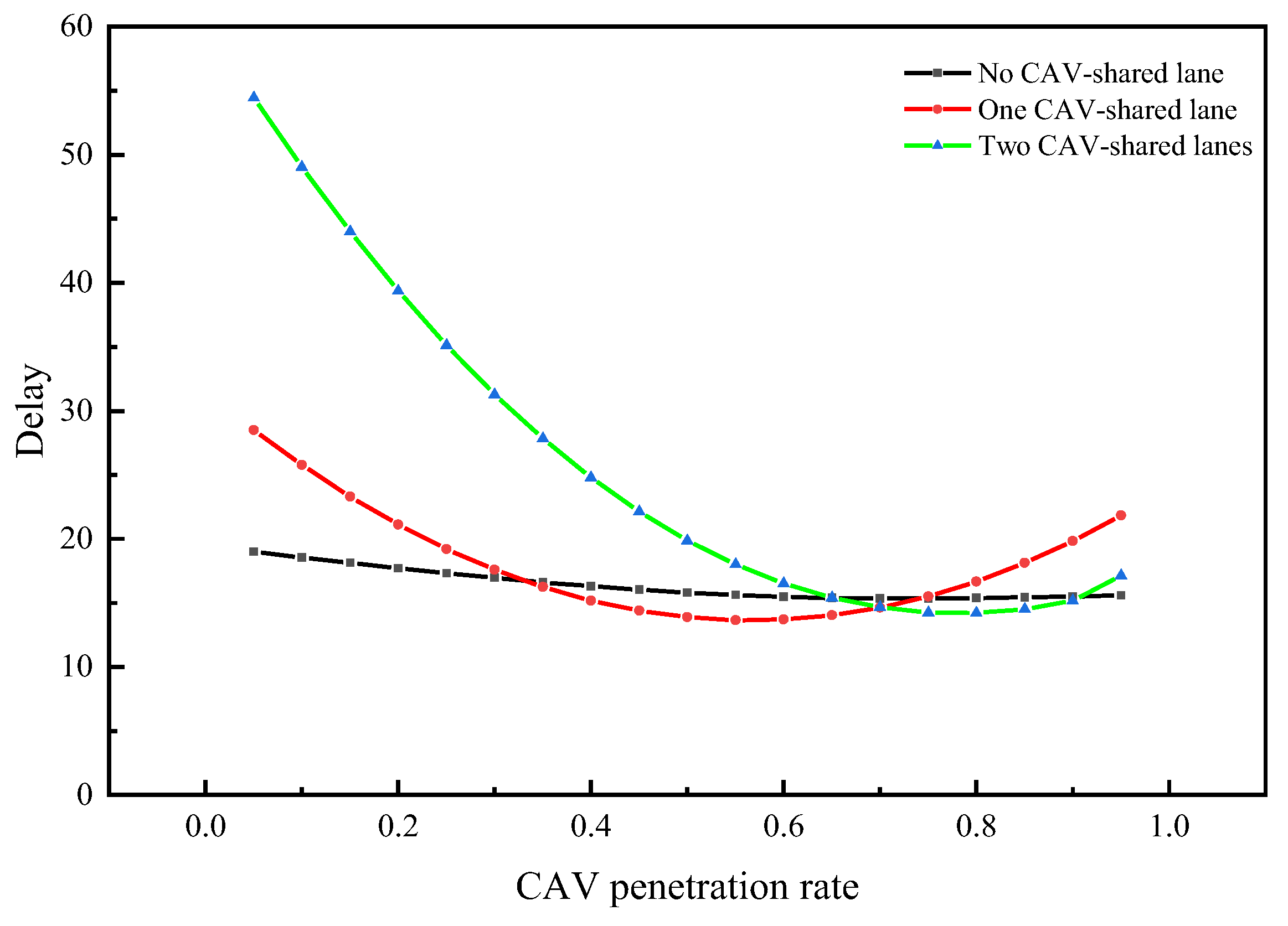
5.2. Sensitivity Analysis
6. Conclusions
- (1)
- This paper designs a dynamic allocation method of CAV-shared lanes to tap the traffic potential of CAV-dedicated lanes and constructs a traffic flow scheduling and CAV trajectory optimization method for multilane intersections with CAV-shared lanes to improve the traffic performance in mixed CHV and CAV traffic. The simulation results show that the optimization strategy proposed in this study can reduce the average delay at the intersection to varying degrees compared with the control strategy, using (a) the dynamic CAV-dedicated lane allocation method proposed in the literature [14] and (b) the shared-phase dedicated-lane method proposed in the literature [18]. Although the stops of CAVs will be increased, the time utilization rates of most approach lanes are improved considerably, particularly those of CAV-shared lanes. Further analysis shows that the number of CAV-shared lanes is closely dependent on the CAV penetration rate.
- (2)
- This study only solves the dynamic allocation and signal control of CAV-shared lanes. The impact of additional stops on CHV efficiency, safety, and riding comfort, as well as the impact of CAV trajectory control on energy consumption and exhaust emissions, is not considered.
- (3)
- In addition, future research can consider the optimization control problem of other transportation modes (such as public transportation, carpooling, and slow traffic) at intersections with dynamic CAV-shared lanes to verify the applicability of this method in complex road environments, thereby further improving the overall efficiency of the transportation system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pourmehrab, M.; Elefteriadou, L.; Ranka, S.; Martin-Gasulla, M. Optimizing Signalized Intersections Performance Under Conventional and Automated Vehicles Traffic. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2864–2873. [Google Scholar] [CrossRef]
- Shi, H.; Zhou, Y.; Wu, K.; Wang, X.; Lin, Y.; Ran, B. Connected automated vehicle cooperative control with a deep reinforcement learning approach in a mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2021, 133, 103421. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Y.; Xu, Q.; Wang, J.; Li, K. Controllability analysis and optimal control of mixed traffic flow with human-driven and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7445–7459. [Google Scholar] [CrossRef]
- Xiong, B.K.; Jiang, R. Speed advice for connected vehicles at an isolated signalized intersection in a mixed traffic flow considering stochasticity of human driven vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11261–11272. [Google Scholar] [CrossRef]
- Mo, Z.; Li, W.; Fu, Y.; Ruan, K.; Di, X. CVLight: Decentralized learning for adaptive traffic signal control with connected vehicles. Transp. Res. Part C Emerg. Technol. 2022, 141, 103728. [Google Scholar] [CrossRef]
- Wang, Q.; Gong, Y.; Yang, X. Connected automated vehicle trajectory optimization along signalized arterial: A decentralized approach under mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2022, 145, 103918. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Distributed Optimization and Coordination Algorithms for Dynamic Speed Optimization of Connected and Autonomous Vehicles in Urban Street Networks. Transp. Res. Part C Emerg. Technol. 2018, 95, 497–515. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Dynamic Speed Harmonization in Connected Urban Street Networks. Comput. Civ. Infrastruct. Eng. 2018, 33, 510–523. [Google Scholar] [CrossRef]
- Asadi, B.; Vahidi, A. Predictive Cruise Control: Utilizing Upcoming Traffic Signal Information for Improving Fuel Economy and Reducing Trip Time. IEEE Trans. Control Syst. Technol. 2010, 19, 707–714. [Google Scholar] [CrossRef]
- Jung, H.; Choi, S.; Park, B.B.; Lee, H.; Son, S.H. Bi-level Optimization for Eco-traffic Signal System. In Proceedings of the IEEE 2016 International Conference on Connected Vehicles and Expo (ICCVE), Seattle, WA, USA, 12–16 September 2016; pp. 29–35. [Google Scholar] [CrossRef]
- Zhang, Y.; Cassandras, C.G. An impact study of integrating connected automated vehicles with conventional traffic. Annu. Rev. Control. 2019, 48, 347–356. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal Control Optimization for Automated Vehicles at Isolated Signalized Intersections. Transp. Res. Part C Emerg. Technol. 2014, 49, 1–18. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J.; Xiong, C.; Li, X.; Zhou, F.; Hao, W. Joint Optimization of Vehicle Trajectories and Intersection Controllers with Connected Automated Vehicles: Combined Dynamic Programming and Shooting Heuristic Approach. Transp. Res. Part C Emerg. Technol. 2019, 98, 54–72. [Google Scholar] [CrossRef]
- Jiang, X.; Shang, Q. A Dynamic CAV-dedicated lane allocation method with the joint optimization of signal timing parameters and smooth trajectory in a mixed traffic environment. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6436–6449. [Google Scholar] [CrossRef]
- Rey, D.; Levin, M.W. Blue phase: Optimal Network Traffic Control for Legacy and Autonomous Vehicles. Transp. Res. Part B Methodol. 2019, 130, 105–129. [Google Scholar] [CrossRef]
- Niroumand, R.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. Joint Optimization of Vehicle-group Trajectory and Signal Timing: Introducing the White Phase for Mixed-autonomy Traffic Stream. Transp. Res. Part C Emerg. Technol. 2020, 116, 102659. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M.J. Optimal Traffic Management Policies for Mixed Human and Automated Traffic Flows. Transp. Res. Part A Policy Pract. 2020, 135, 130–143. [Google Scholar] [CrossRef]
- Ma, W.; Li, J.; Yu, C. Shared-phase-dedicated-lane based intersection control with mixed traffic of human-driven vehicles and connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2022, 135, 103509. [Google Scholar] [CrossRef]
- Tan, H.; Wu, Y.; Shen, B.; Jin, P.J.; Ran, B. Short-term traffic prediction based on dynamic tensor completion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1–11. [Google Scholar] [CrossRef]
- Bretherton, D.; Bodger, M.; Cowling, J. SCOOT-managing congestion communications and control. Traffic Eng. Control 2006, 47, 88–92. [Google Scholar]
- Dion, F.; Rekha, H.; Kang, Y.S. Comparison of delay estimates at under-saturated and over-saturated pre-timed signalized intersections. Transp. Res. Part B Methodol. 2004, 38, 99–122. [Google Scholar] [CrossRef]
- Panwai, S.; Dia, H. Comparative Evaluation of Microscopic Car-Following Behavior. IEEE Trans. Intell. Transp. Syst. 2005, 6, 314–325. [Google Scholar] [CrossRef]
- Yao, H.; Li, X. Decentralized Control of Connected Automated Vehicle Trajectories in Mixed Traffic at an Isolated Signalized Intersection. Transp. Res. Part C Emerg. Technol. 2020, 121, 102846. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Names | Value |
|---|---|
| Maximum speed (m/s) | 13 |
| Minimum speed (m/s) | 4 |
| Speed limit of the intersection (m/s) | 11 |
| Maximum acceleration (m/s2) | 4 |
| Desired acceleration (m/s2) | 2.5 |
| Trajectory updating interval (s) | 0.5 |
| Minimum green time for left-turning movements (s) | 12 |
| Maximum green time for left-turning movements (s) | 45 |
| Minimum green time for through and right-turning movements (s) | 12 |
| Maximum green time for through and right-turning movements (s) | 60 |
| Average length of vehicles (m) | 4 |
| Safe space between adjacent CAVs in queuing (m) | 0.5 |
| Safety distance between consecutive vehicles (m) | 3.6 |
| The reaction time for CAVs (s) | 0.1 |
| The reaction time for CHVs (s) | 1.0 |
| Saturation headway between CAV-CAV and CAV-CHV (s) | 1 |
| Saturation headway between CHV-CHV and CHV-CAV (s) | 2 |
| Saturation flow rate of the CAV-dedicated lane and CAV-shared lane for through movements (pcu/h) | 3600 |
| Saturation flow rate of the human-driven lane for through movements (pcu/h) | 1800 |
| Saturation flow rate of the CAV-dedicated lane and CAV-shared lane for left-turn movements(pcu/h) | 3200 |
| Saturation flow rate of the human-driven lane for left-turn movements (pcu/h) | 1600 |
| Study period (s) | 3600 |
| Approach | Traffic Volume/(pcu·h−1) | |||
|---|---|---|---|---|
| Left-Turn | Through and Right-Turn | |||
| CHV | CAV | CHV | CAV | |
| East | 128 | 137 | 506 | 518 |
| West | 125 | 142 | 494 | 537 |
| South | 133 | 154 | 487 | 509 |
| North | 161 | 175 | 533 | 558 |
| Plan | Approach | Phase 1 | Phase 2 | Approach | Phase 3 | Phase 4 | All |
|---|---|---|---|---|---|---|---|
| Scheme 1 | East | 0.69 | 0.64 | South | 0.70 | 0.71 | 0.69 |
| West | 0.70 | 0.65 | North | 0.69 | 0.70 | ||
| Scheme 2 | East | 0.74 | 0.75 | South | 0.74 | 0.75 | 0.74 (↑7.47%) |
| West | 0.73 | 0.74 | North | 0.75 | 0.76 |
| Plan | Approach | Phase 1 | Phase 2 | Approach | Phase 3 | Phase 4 | All |
|---|---|---|---|---|---|---|---|
| Scheme 1 | East | 11.43 | 10.79 | South | 11.37 | 11.94 | 11.36 |
| West | 11.37 | 10.89 | North | 11.45 | 11.79 | ||
| Scheme 2 | East | 11.05 | 10.37 | South | 10.29 | 10.71 | 10.65 (↓6.25%) |
| West | 11.02 | 10.34 | North | 10.36 | 10.82 |
| Plan | Left-Turn Lane | CAV-Shared Lane | Through Lane | Sharing Lane for Through and Right-Turn Vehicles |
|---|---|---|---|---|
| Scheme 1 | 0.24 | 0.21 | 0.21 | 0.23 |
| Scheme 2 | 0.16 (↓33.33%) | 0.43 (↑100.50%) | 0.27 (↑28.57%) | 0.29 (↑26.09%) |
| Demand | 50% CAVs | 80% CAVs | ||
|---|---|---|---|---|
| Level | Shared-Phase Dedicated Lane | Proposed Method | Shared-Phase Dedicated Lane | Proposed Method |
| 1 | 7.47 | 7.11 (↓4.82%) | 7.73 | 6.82 (↓11.77%) |
| 2 | 10.69 | 10.65 (↓0.37%) | 11.24 | 10.19 (↓9.34%) |
| 3 | 15.33 | 15.31 (↓0.13%) | 16.01 | 14.41 (↓9.99%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Li, M.; Jiang, X. Dynamic Control Method for CAV-Shared Lanes at Intersections in Mixed Traffic Flow. Sustainability 2024, 16, 9706. https://doi.org/10.3390/su16229706
Hu X, Li M, Jiang X. Dynamic Control Method for CAV-Shared Lanes at Intersections in Mixed Traffic Flow. Sustainability. 2024; 16(22):9706. https://doi.org/10.3390/su16229706
Chicago/Turabian StyleHu, Xiyuan, Mengying Li, and Xiancai Jiang. 2024. "Dynamic Control Method for CAV-Shared Lanes at Intersections in Mixed Traffic Flow" Sustainability 16, no. 22: 9706. https://doi.org/10.3390/su16229706
APA StyleHu, X., Li, M., & Jiang, X. (2024). Dynamic Control Method for CAV-Shared Lanes at Intersections in Mixed Traffic Flow. Sustainability, 16(22), 9706. https://doi.org/10.3390/su16229706