
Fuzzy Logic-Based Smart Control of Wind Energy Conversion System Using Cascaded Doubly Fed Induction Generator

 , , , ,
, , , ,
Abstract
1. Introduction
- An FLC was designed for a CDFIG in WECS application.
- The reliability and applicability of the CDFIG controlled by an FLC were demonstrated under various conditions, including active power variations, smooth and step wind speed changes, and even the worst case of random wind speed variation.
- To demonstrate the effectiveness of the proposed FLC well, its performance was compared to well-established methods such as the use of PI and FOPID controllers.
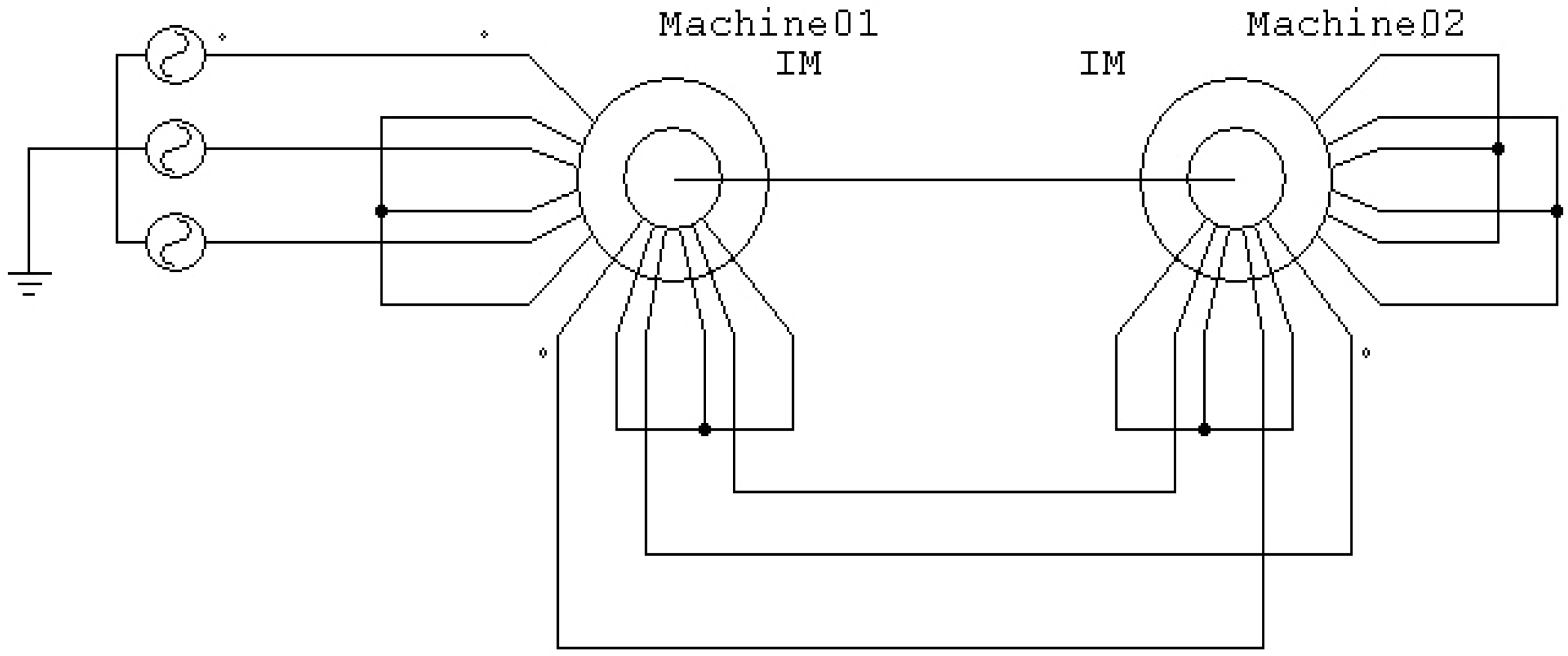
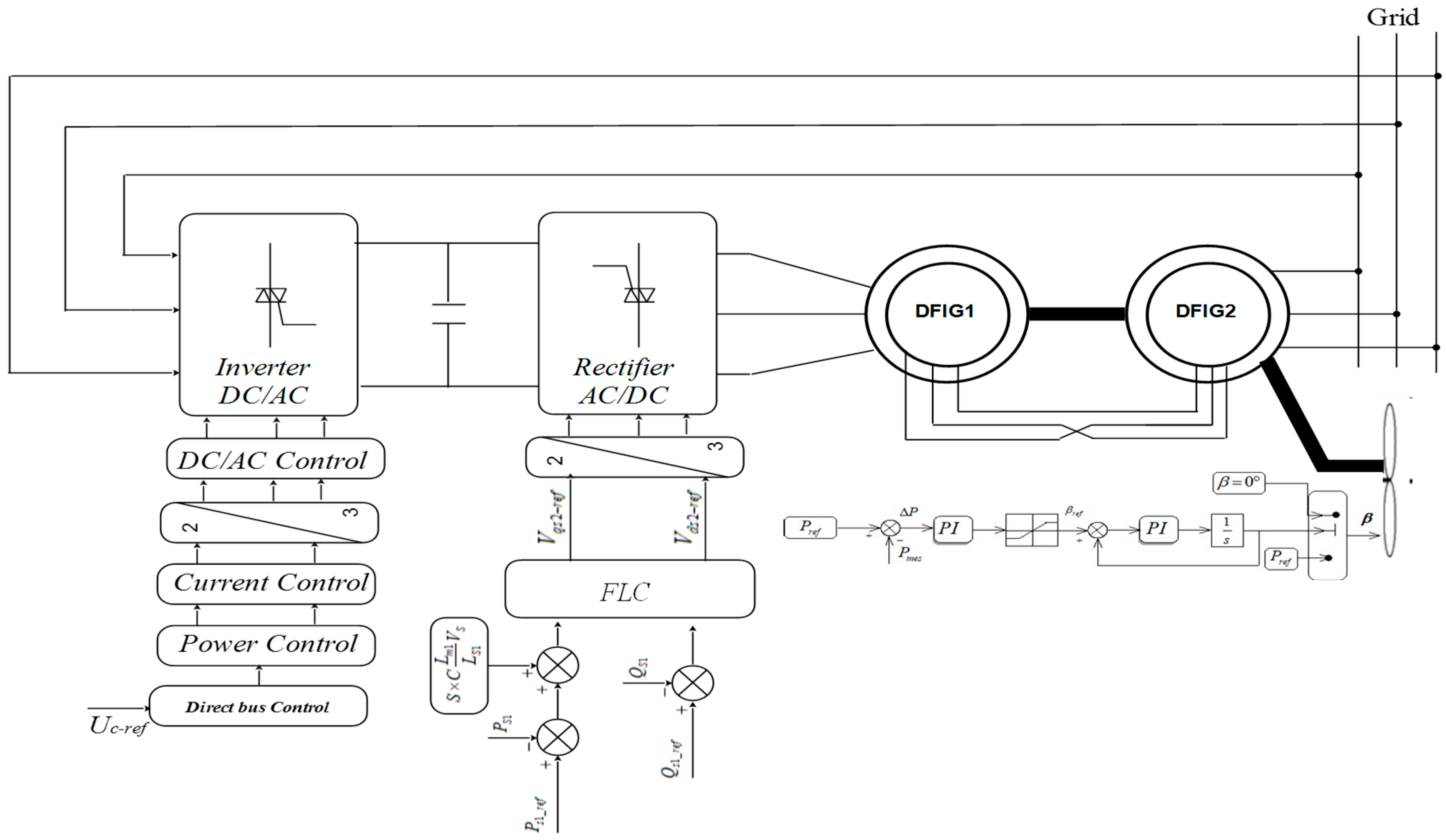
2. The Modeling and Description of the Energy Conversion Chain
2.1. Control Powers of Stator-1
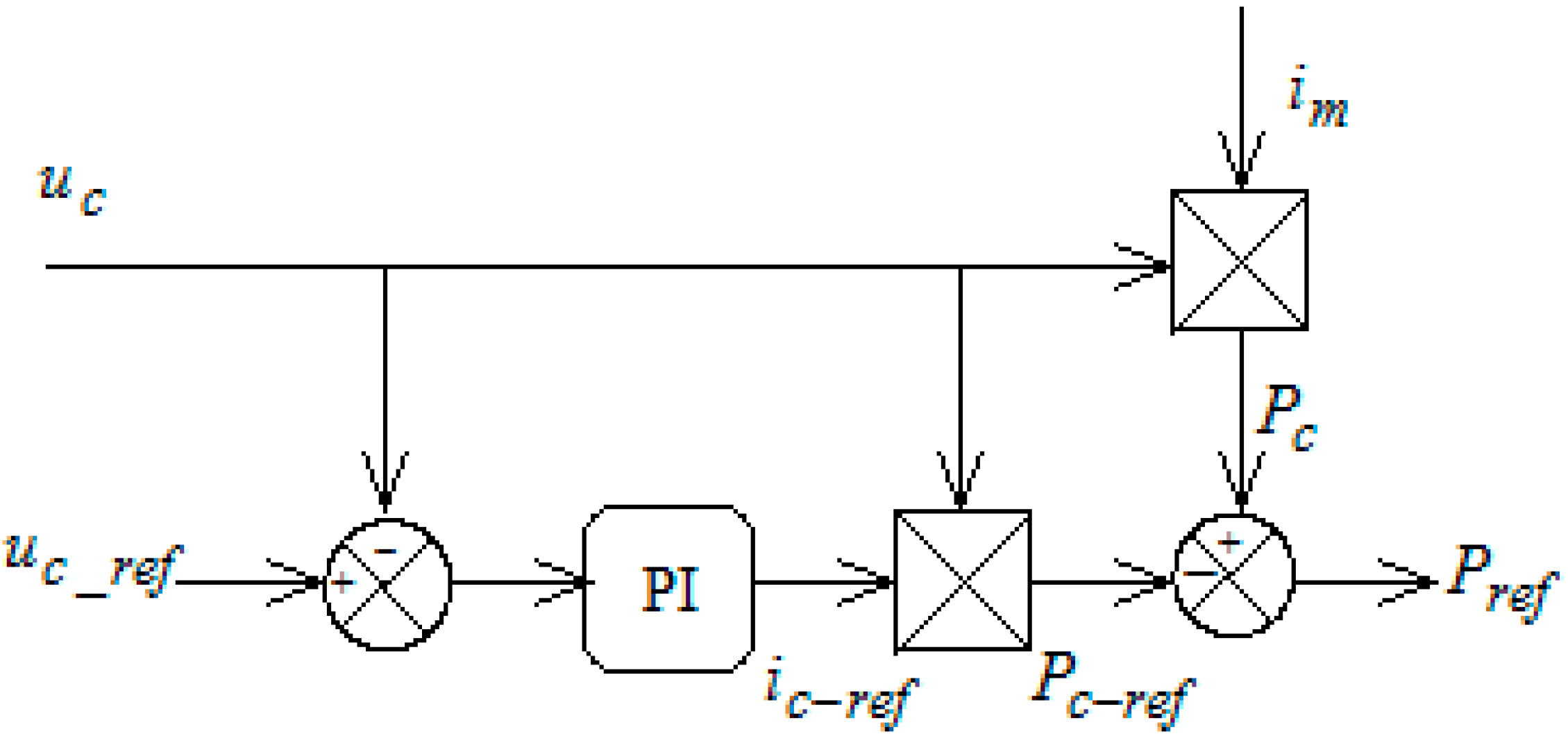
2.2. The Modeling of the Connection to the Electrical Network
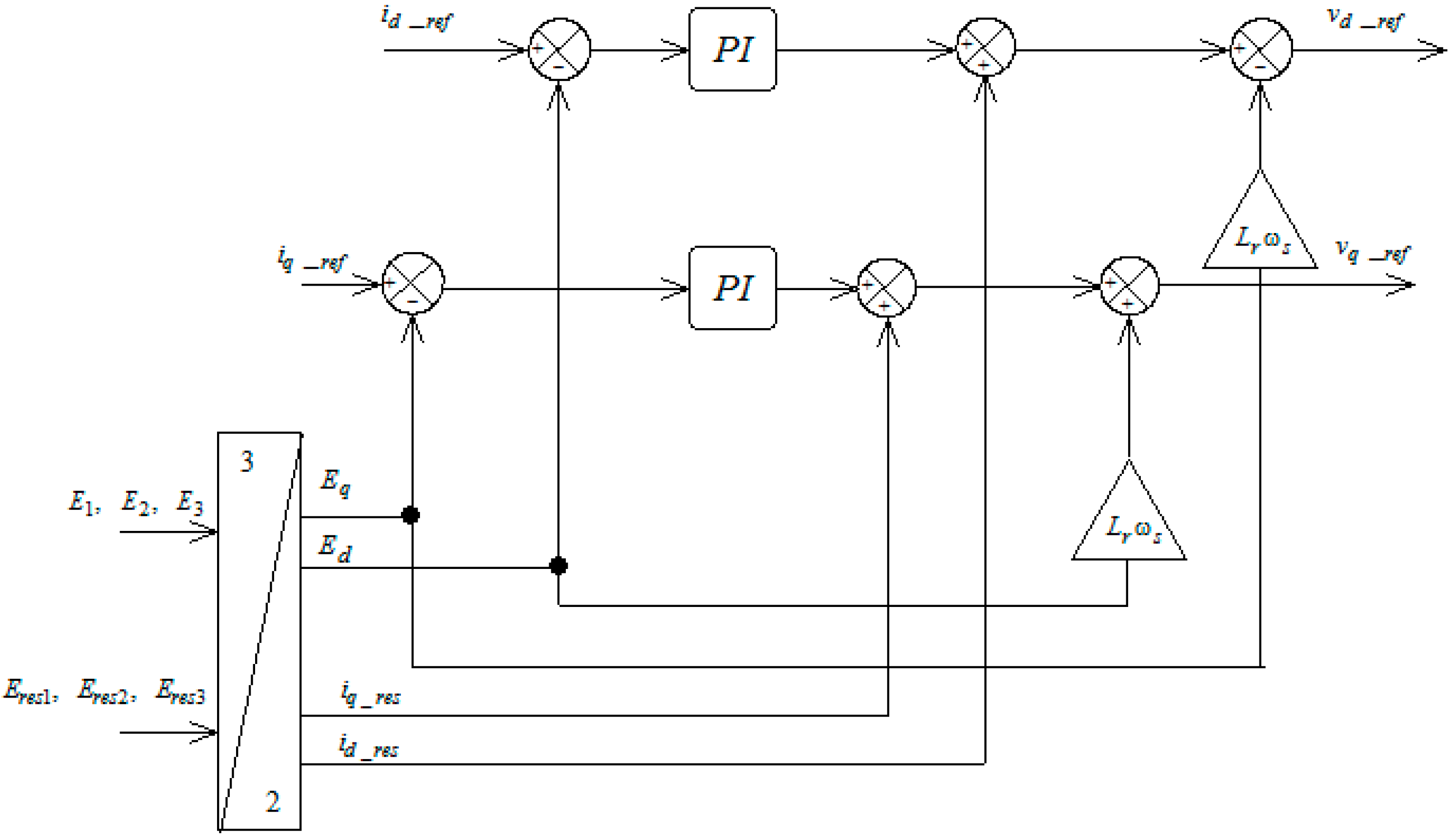
3. The Design of the Used Controllers
3.1. PI Controller
3.2. Fractional-Order PID Controller
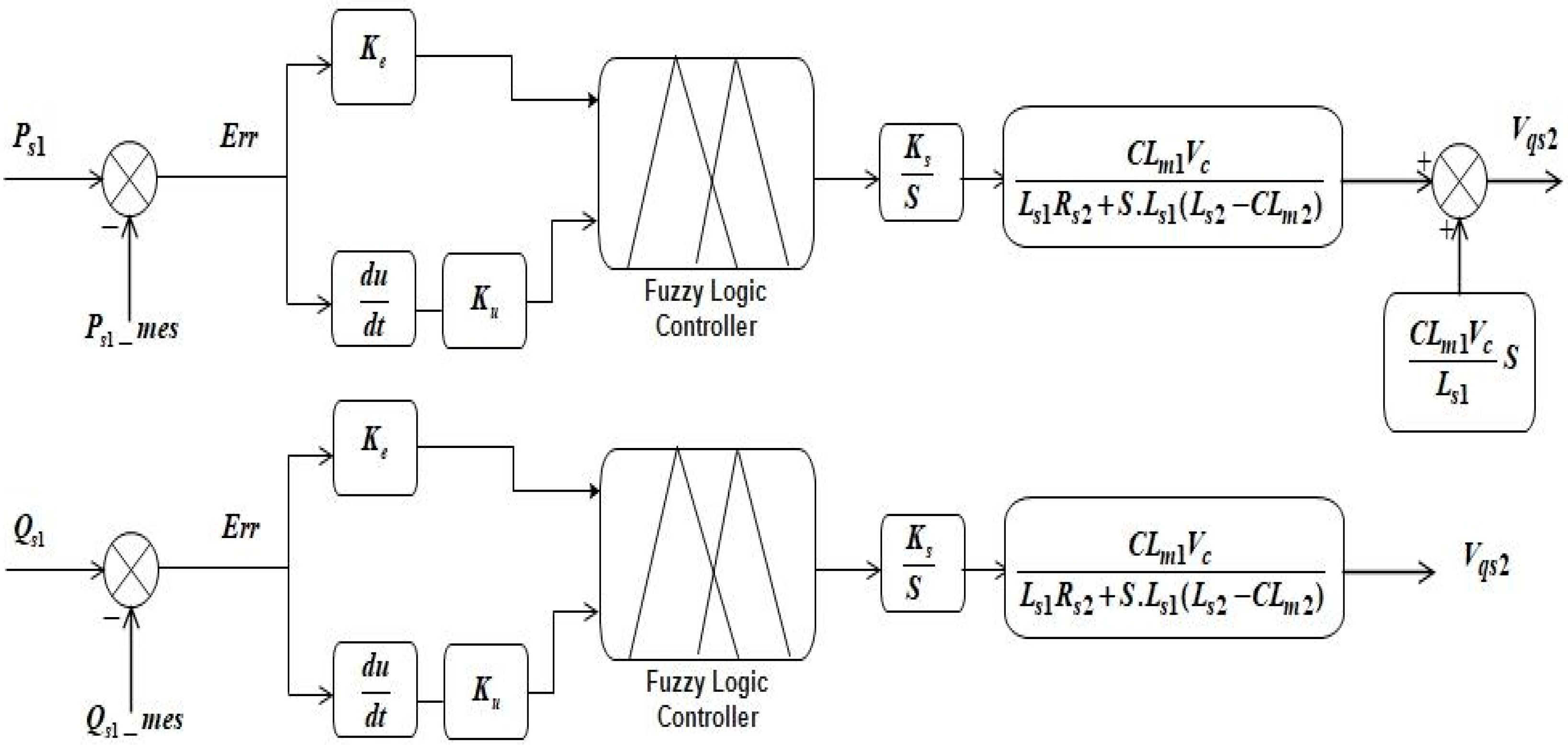
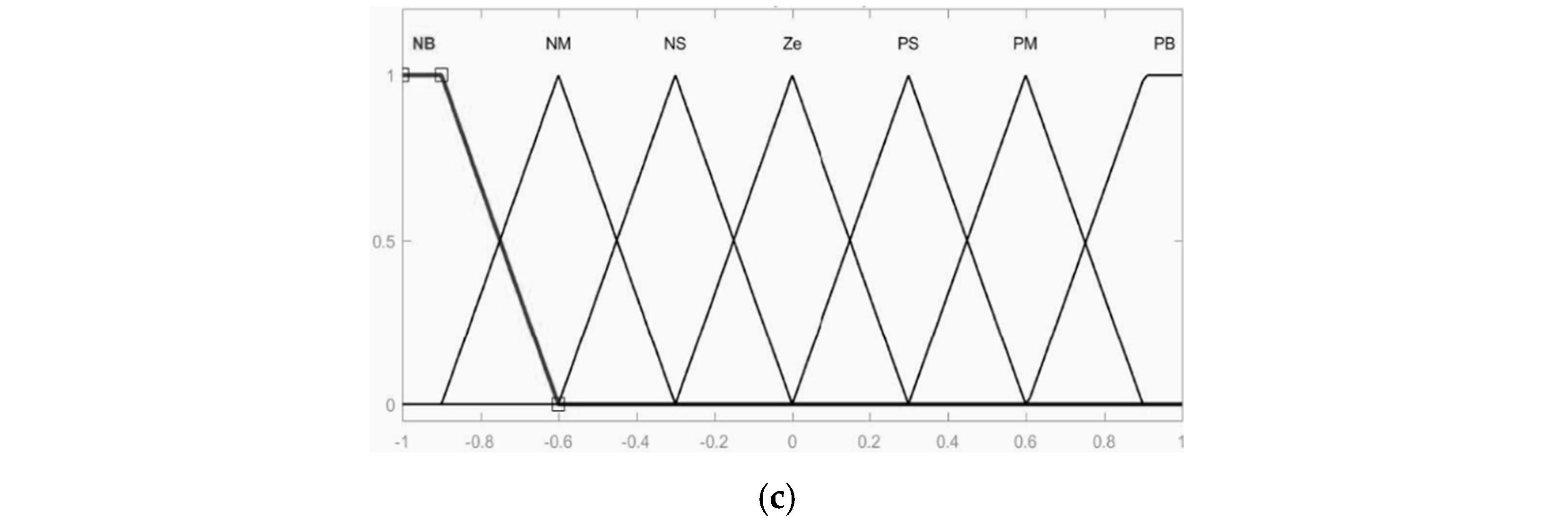
3.3. Fuzzy Logic Controller
4. Outcomes and Discussion
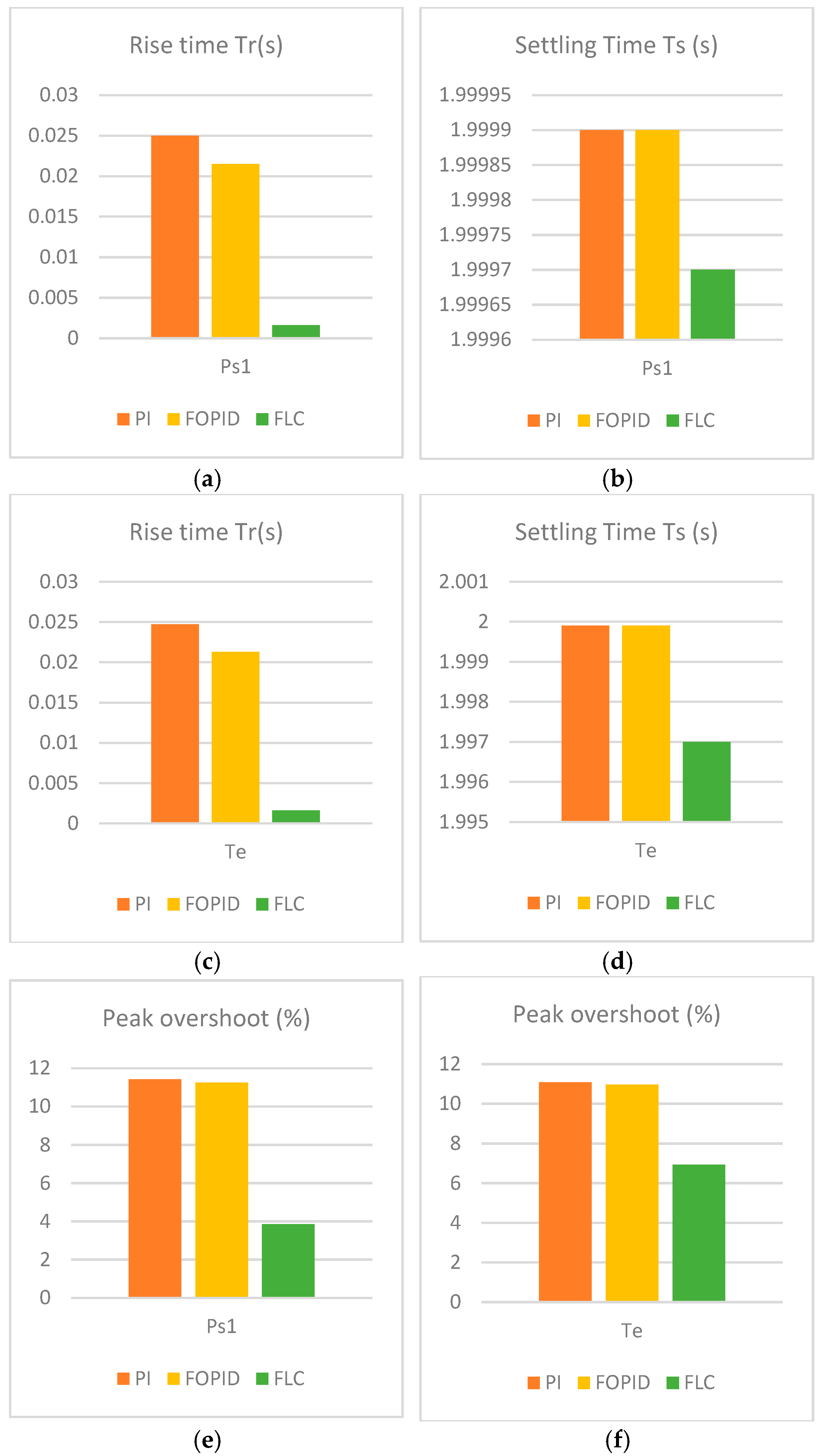
4.1. Test 1. Effect of Active Power Variation
4.2. Test 2. The Effect of the Inertia of the WT
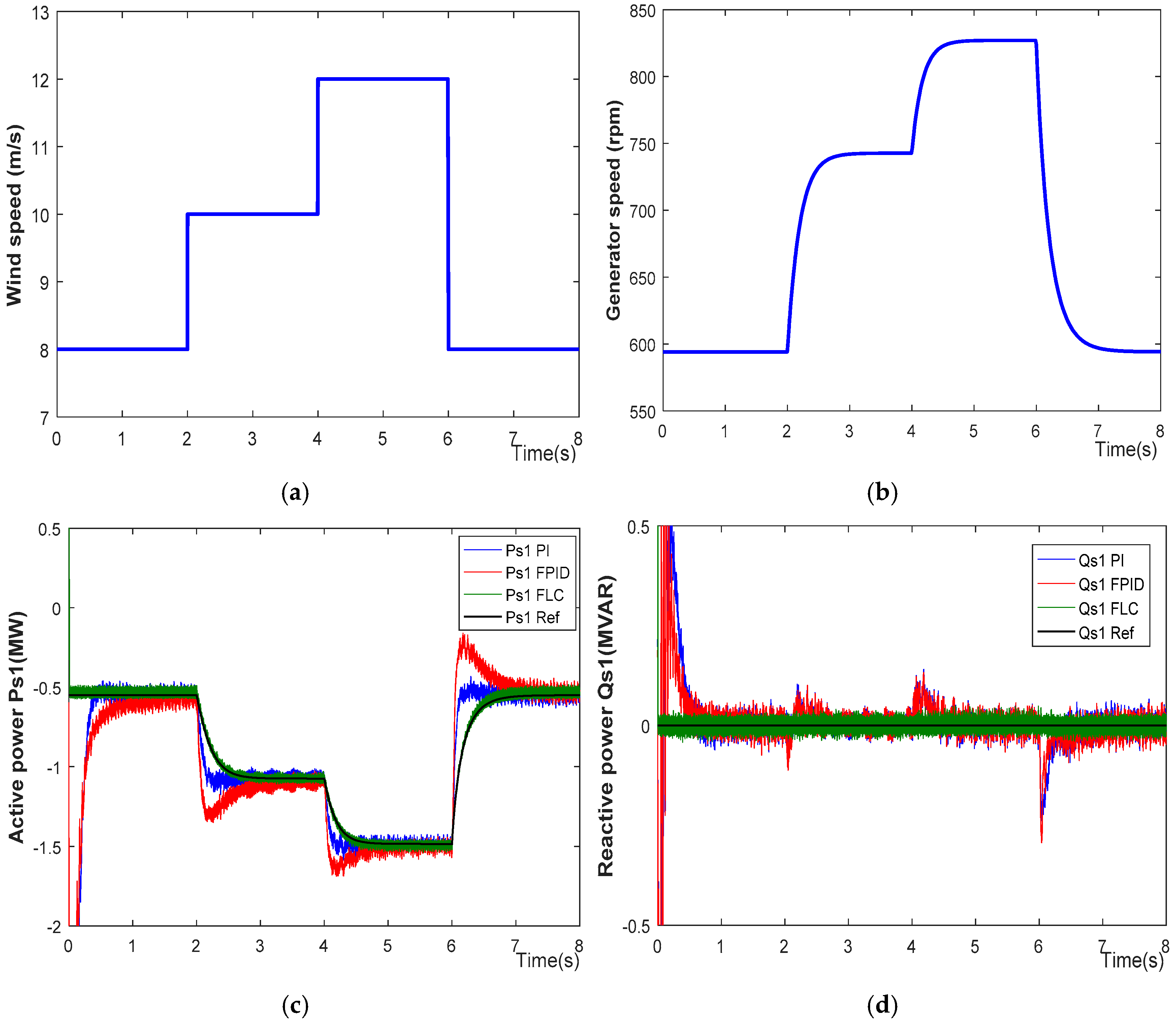
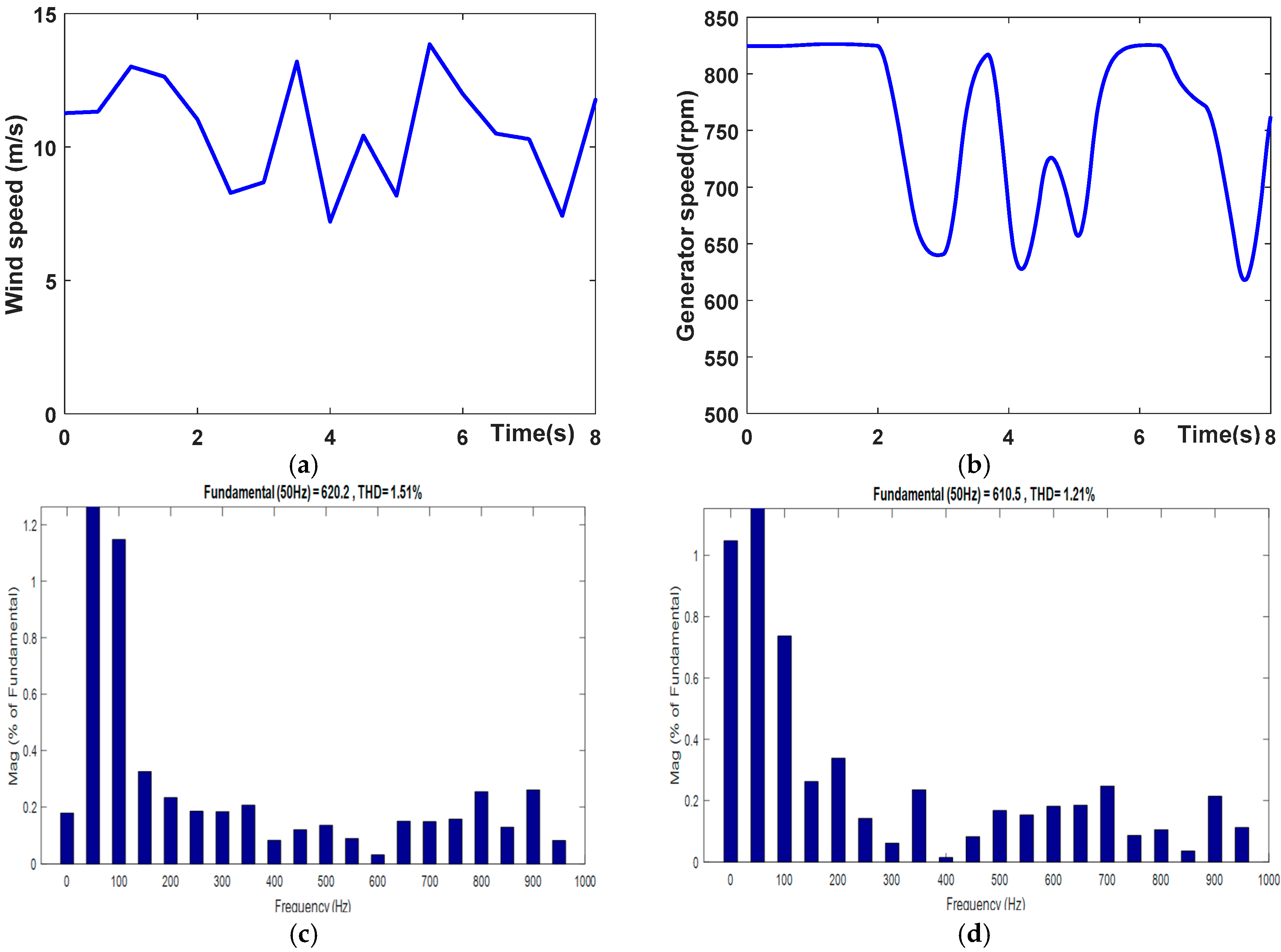
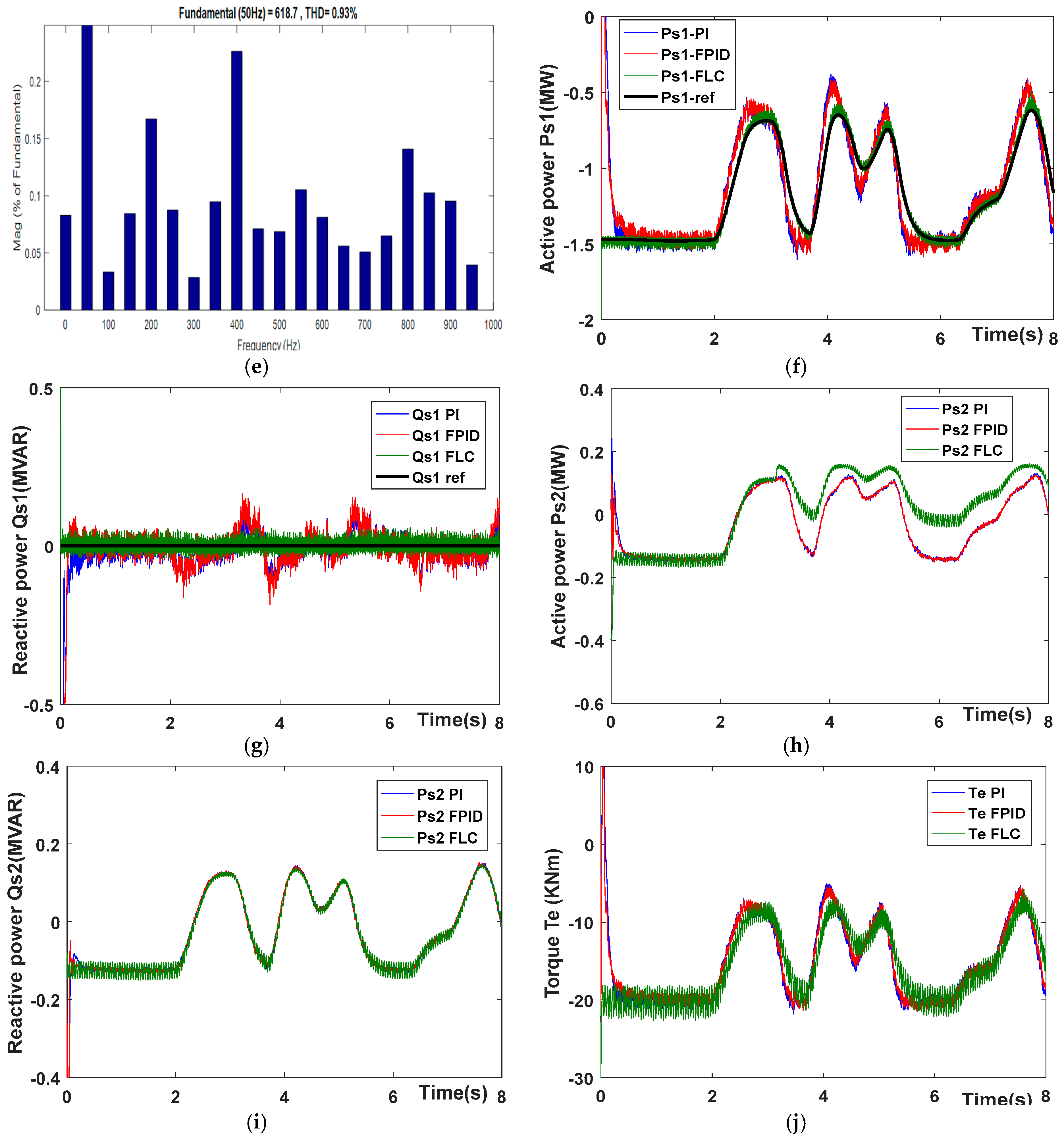
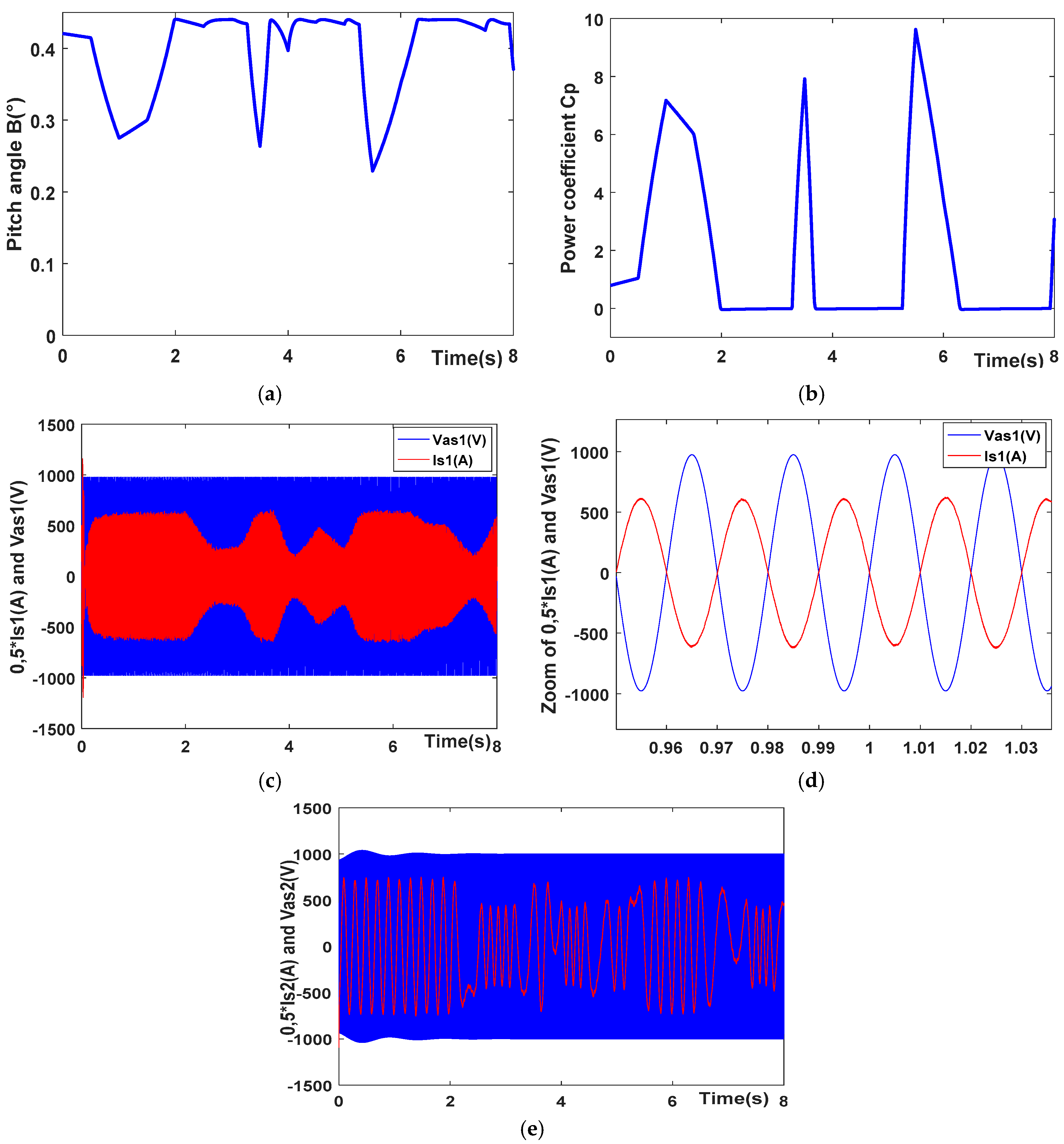
4.3. Test 3. Performance of CDFIG Under Random Wind Speed
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Q.; Luo, K.; Wu, C.; Tan, J.; He, R.; Ye, S.; Fan, J. Inter-farm cluster interaction of the operational and planned offshore wind power base. J. Clean. Prod. 2023, 396, 136529. [Google Scholar] [CrossRef]
- Ye, S.; Wang, Q.; Mu, Y.; Luo, K.; Fan, J. Loads and fatigue characteristics assessment of wind farm based on dynamic wake meandering model. Renew. Energy 2024, 236, 121419. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Q.; Ye, S.; Luo, K.; Fan, J. Efficient layout optimization of offshore wind farm based on load surrogate model and genetic algorithm. Energy 2024, 309, 133106. [Google Scholar] [CrossRef]
- Behara, R.K.; Saha, A.K. Analysis of Wind Characteristics for Grid-Tied Wind Turbine Generator Using Incremental Generative Adversarial Network Model. IEEE Access 2024, 12, 38315–38334. [Google Scholar] [CrossRef]
- Kumar, R.; Mishra, S.K.; Mohanta, D.K. An integrated development environment based situational awareness for operational reliability evaluation in wind energy systems incorporating uncertainties. Electr. Power Syst. Res. 2024, 233, 110467. [Google Scholar] [CrossRef]
- Akhtar, I.; Altamimi, A.; Khan, Z.A.; Alojaiman, B.; Alghassab, M.; Kirmani, S. Reliability Analysis and Economic Prospect of Wind Energy Sources Incorporated Microgrid System for Smart Buildings Environment. IEEE Access 2023, 11, 62013–62027. [Google Scholar] [CrossRef]
- Lohr, C.; Peterssen, F.; Schlemminger, M.; Bensmann, A.; Niepelt, R.; Brendel, R.; Hanke-Rauschenbach, R. Multi-criteria energy system analysis of onshore wind power distribution in climate-neutral Germany. Energy Rep. 2024, 12, 1905–1920. [Google Scholar] [CrossRef]
- Neshat, M.; Sergiienko, N.Y.; Nezhad, M.M.; da Silva, L.S.; Amini, E.; Marsooli, R.; Garcia, D.A.; Mirjalili, S. Enhancing the performance of hybrid wave-wind energy systems through a fast and adaptive chaotic multi-objective swarm optimisation method. Appl. Energy 2024, 362, 122955. [Google Scholar] [CrossRef]
- Rasool, S.; Muttaqi, K.M.; Sutanto, D. A Novel Configuration of a Hybrid Offshore Wind-Wave Energy Conversion System and Its Controls for a Remote Area Power Supply. IEEE Trans. Ind. Appl. 2022, 58, 7805–7817. [Google Scholar] [CrossRef]
- Majout, B.; Bossoufi, B.; Karim, M.; Skruch, P.; Mobayen, S.; El Mourabit, Y.; Laggoun, Z.E.Z. Artificial neural network-based direct power control to enhance the performance of a PMSG-wind energy conversion system under real wind speed and parameter uncertainties: An experimental validation. Energy Rep. 2024, 11, 4356–4378. [Google Scholar] [CrossRef]
- Maafa, A.; Abdelghani, Y.; Mellah, H.; Smail, H.; Sahraoui, H. Optimization of the Powers Exchanged between a Cascaded Doubly Fed Induction Generator and the Grid with a Matrix Converter. Eurasia Proc. Sci. Technol. Eng. Math. 2023, 26, 700–709. [Google Scholar] [CrossRef]
- Milles, A.; Merabet, E.; Benbouhenni, H.; Debdouche, N.; Colak, I. Robust control technique for wind turbine system with interval type-2 fuzzy strategy on a dual star induction generator. Energy Rep. 2024, 11, 2715–2736. [Google Scholar] [CrossRef]
- Hossain, M.A.; Chakrabortty, R.K.; Elsawah, S.; Gray, E.; Ryan, M.J. Predicting Wind Power Generation Using Hybrid Deep Learning with Optimization. IEEE Trans. Appl. Supercond. 2021, 31, 06013055. [Google Scholar] [CrossRef]
- Kushwaha, A.; Gopal, M.; Singh, B. Q-Learning based Maximum Power Extraction for Wind Energy Conversion System with Variable Wind Speed. IEEE Trans. Energy Convers. 2020, 35, 1160–1170. [Google Scholar] [CrossRef]
- Li, Y.; Yin, P.-K.; Chen, F.-B. Prediction of wind load power spectrum on high-rise buildings by various machine-learning algorithms. Structures 2024, 67, 107015. [Google Scholar] [CrossRef]
- Maafa, A.; Mellah, H.; Ghedamsi, K.; Aouzellag, D. Improvement of Sliding Mode Control Strategy Founded on Cascaded Doubly Fed Induction Generator Powered by a Matrix Converter. Eng. Technol. Appl. Sci. Res. 2022, 12, 9217–9223. [Google Scholar] [CrossRef]
- Li, N.; He, F.; Ma, W.; Wang, R.; Zhang, X. Wind Power Prediction of Kernel Extreme Learning Machine Based on Differential Evolution Algorithm and Cross Validation Algorithm. IEEE Access 2020, 8, 68874–68882. [Google Scholar] [CrossRef]
- Dineshkumar, C.; Jeong, J.H.; Joo, Y.H. Observer-based fuzzy control for fractional order PMSG wind turbine systems with adaptive quantized-mechanism. Commun. Nonlinear Sci. Numer. Simul. 2024, 136, 108087. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Bizon, N.; Mosaad, M.I.; Colak, I.; Djilali, A.B.; Gasmi, H. Enhancement of the power quality of DFIG-based dual-rotor wind turbine systems using fractional order fuzzy controller. Expert Syst. Appl. 2024, 238, 121695. [Google Scholar] [CrossRef]
- Wadawa, B.; Errami, Y.; Obbadi, A.; Sahnoun, S. Robustification of the H∞ controller combined with fuzzy logic and PI&PID-Fd for hybrid control of Wind Energy Conversion System Connected to the Power Grid Based on DFIG. Energy Rep. 2021, 7, 7539–7571. [Google Scholar]
- Arifin, M.S.; Uddin, M.N.; Wang, W. Neuro-Fuzzy Adaptive Direct Torque and Flux Control of a Grid-Connected DFIG-WECS with Improved Dynamic Performance. IEEE Trans. Ind. Appl. 2023, 59, 7692–7700. [Google Scholar] [CrossRef]
- Chishti, F.; Murshid, S.; Singh, B. Weak Grid Intertie WEGS with Hybrid Generalized Integrator for Power Quality Improvement. IEEE Trans. Ind. Electron. 2020, 67, 1113–1123. [Google Scholar] [CrossRef]
- Tamaarat, A. Active and Reactive Power Control for DFIG Using PI, Fuzzy Logic and Self-Tuning PI Fuzzy Controllers. Adv. Model. Anal. C 2019, 74, 95–102. [Google Scholar] [CrossRef]
- Mokhtari, M.; Zouggar, S.; M’sirdi, N.K.; Elhafyani, M.L. Sliding Mode & Single Input Fuzzy Logic Controllers for Voltage Regulation of an Asynchronous Wind Turbine Using STATCOM. IFAC-PapersOnLine 2020, 53, 12803–12808. [Google Scholar]
- Zamzoum, O.; Derouich, A.; Motahhir, S.; El Mourabit, Y.; El Ghzizal, A. Performance analysis of a robust adaptive fuzzy logic controller for wind turbine power limitation. J. Clean. Prod. 2020, 265, 121659. [Google Scholar] [CrossRef]
- Gholamrezaie, V.; Dozein, M.G.; Monsef, H.; Wu, B. An Optimal Frequency Control Method Through a Dynamic Load Frequency Control (LFC) Model Incorporating Wind Farm. IEEE Syst. J. 2018, 12, 392–401. [Google Scholar] [CrossRef]
- Takayama, S.; Matsuhashi, R. Development of model for load frequency control in power system with large-scale integration of renewable energy. In Proceedings of the 2016 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 19–20 February 2016; pp. 1–8. [Google Scholar]
- Ashfaq, T.; Mumtaz, S.; Ahmad, S.; Ullah, B.; Albogamy, F.R. Automatic Generation Control in Renewables-Integrated Multi-Area Power Systems: A Comparative Control Analysis. Sustainability 2024, 16, 5735. [Google Scholar] [CrossRef]
- Mehta, S.; Basak, P. Cascaded dual fuzzy logic controller for stable microgrid operation mitigating effects of natural uncertainty in solar and wind energy sources. e-Prime-Adv. Electr. Eng. Electron. Energy 2023, 5, 100215. [Google Scholar] [CrossRef]
- Salem, A.A.; Aldin, N.A.N.; Azmy, A.M.; Abdellatif, W.S.E. Implementation and Validation of an Adaptive Fuzzy Logic Controller for MPPT of PMSG-Based Wind Turbines. IEEE Access 2021, 9, 165690–165707. [Google Scholar] [CrossRef]
- Puchalapalli, S.; Singh, B. A Single Input Variable FLC for DFIG-Based WPGS in Standalone Mode. IEEE Trans. Sustain. Energy 2020, 11, 595–607. [Google Scholar] [CrossRef]
- El Mezdi, K.; El Magri, A.; Watil, A.; El Myasse, I.; Bahatti, L. Integrated Control and Energy Flow Management for Hybrid Grid-Connected Photovoltaic/Wind Systems with Battery Storage Using Fuzzy Logic Controllers. IFAC-PapersOnLine 2024, 58, 442–447. [Google Scholar] [CrossRef]
- Huerta, H.; Loukianov, A. Energy based sliding mode control of Brushless Double-fed Induction Generator. Int. J. Electr. Power Energy Syst. 2021, 130, 107002. [Google Scholar] [CrossRef]
- Huerta, H. Brushless Double-Fed Induction Generator Control: Passivity with High Order Sliding Modes Control. In Proceedings of the 2023 9th International Conference on Control, Decision and Information Technologies (CoDIT), Rome, Italy, 3–6 July 2023; pp. 602–607. [Google Scholar]
- Liu, Y.; Hussien, M.G.; Xu, W.; Shao, S.; Rashad, E.M. Recent Advances of Control Technologies for Brushless Doubly-Fed Generators. IEEE Access 2021, 9, 123324–123347. [Google Scholar] [CrossRef]
- Dauksha, G.; Górski, D.; Iwański, G. State-feedback control of a grid-tied cascaded brushless doubly-fed induction machine. Electr. Power Syst. Res. 2024, 228, 110043. [Google Scholar] [CrossRef]
- Cheng, M.; Cao, Z.; Yan, X. Dual-Negative-Objective Coordinated Control of Brushless Doubly Fed Induction Generator under Unbalanced Grid Voltage. CES Trans. Electr. Mach. Syst. 2024, 8, 347–355. [Google Scholar] [CrossRef]
- Elnaghi, B.E.; Abelwhab, M.N.; Mohammed, R.H.; Abdel-Kader, F.E.S.; Ismaiel, A.M.; Dessouki, M.E. The Validation and Implementation of the Second-Order Adaptive Fuzzy Logic Controller of a Double-Fed Induction Generator in an Oscillating Water Column. Electronics 2024, 13, 291. [Google Scholar] [CrossRef]
- Maafa, A.; Mellah, H.; Sahraoui, H.; Yahiou, A. Performance improvement of a DPC-FPID strategy with matrix converter using CDFIG in wind power system. Wind. Eng. 2024. [Google Scholar] [CrossRef]
- Maafa, A.; Aouzellag, D.; Ghedamsi, K.; Abdessemed, R. Cascaded doubly fed induction generator with variable pitch control system. Rev. Roum. Sci. Tech.-Électrotechn. Énerg 2016, 61, 361–366. [Google Scholar]
- Hopfensperger, B.; Atkinson, D.J.; Lakin, R.A. Combined magnetising flux oriented control of the cascaded doubly-fed induction machine. IEE Proc.-Electr. Power Appl. 2001, 148, 354. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Chen, Z. Single-Electrical-Port Control of Cascaded Doubly-Fed Induction Machine for EV/HEV Applications. IEEE Trans. Power Electron. 2017, 32, 7233–7243. [Google Scholar] [CrossRef]
- El Achkar, M.; Mbayed, R.; Salloum, G.; Le Ballois, S.; Monmasson, E. Generic study of the power capability of a cascaded doubly fed induction machine. Int. J. Electr. Power Energy Syst. 2017, 86, 61–70. [Google Scholar] [CrossRef]
- Patin, N.; Monmasson, E.; Louis, J.-P. Modeling and control of a cascaded doubly-fed induction generator based on dynamical equivalent circuits. Math. Comput. Simul. 2010, 81, 225–238. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.; Agha-kashkooli, M.; Ataei, M. Reduced-order model of cascaded doubly fed induction generator for aircraft starter/generator. IET Electr. Power Appl. 2018, 12, 757–766. [Google Scholar] [CrossRef]
- Hopfensperger, B.; Atkinson, D.J.; Lakin, R.A. Stator flux oriented control of a cascaded doubly-fed induction machine. IEE Proc.-Electr. Power Appl. 1999, 146, 597. [Google Scholar] [CrossRef]
- Patin, N.; Monmasson, E.; Louis, J.-P. Modeling and Control of a Cascaded Doubly Fed Induction Generator Dedicated to Isolated Grids. IEEE Trans. Ind. Electron. 2009, 56, 4207–4219. [Google Scholar] [CrossRef]
- Mehrjardi, R.T.; Ershad, N.F.; Rahrovi, B.; Ehsani, M. Detailed Model of the Grid-Connected Cascaded Doubly Fed Induction Machine. IEEE Trans. Ind. Appl. 2022, 58, 3414–3423. [Google Scholar] [CrossRef]
- Protsenko, K.; Xu, D. Modeling and Control of Brushless Doubly-Fed Induction Generators in Wind Energy Applications. IEEE Trans. Power Electron. 2008, 23, 1191–1197. [Google Scholar] [CrossRef]
- Adamowicz, M.; Strzelecki, R. Cascaded doubly fed induction generator for mini and micro power plants connected to grid. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 1729–1733. [Google Scholar]
- Abdolhadi, H.Z.; Markadeh, G.A.; Boroujeni, S.T. Sliding Mode and Terminal Sliding Mode Control of Cascaded Doubly Fed Induction Generator. Iran. J. Electr. Electron. Eng. 2021, 17, 3. [Google Scholar]
- Hawari, Q.; Kim, T.; Ward, C.; Fleming, J. A robust gain scheduling method for a PI collective pitch controller of multi-MW onshore wind turbines. Renew. Energy 2022, 192, 443–455. [Google Scholar] [CrossRef]
- Turksoy, O.; Ayasun, S.; Hames, Y.; Sönmez, Ş. Computation of Robust PI-Based Pitch Controller Parameters for Large Wind Turbines. Can. J. Electr. Comput. Eng. 2020, 43, 57–63. [Google Scholar] [CrossRef]
- Du, Z.; Yufan, F.; Yang, X.; Li, J. Design of PI Controller for a Class of Discrete Cascade Control Systems. IEEE Trans. Autom. Sci. Eng. 2023, 20, 2607–2615. [Google Scholar] [CrossRef]
- Kakkar, S.; Maity, T.; Ahuja, R.K.; Walde, P.; Saket, R.K.; Khan, B.; Padmanaban, S. Design and Control of Grid-Connected PWM Rectifiers by Optimizing Fractional Order PI Controller Using Water Cycle Algorithm. IEEE Access 2021, 9, 125941–125954. [Google Scholar] [CrossRef]
- Sreenu, C.; Mallesham, G.; Shekar, T.C.; Salkuti, S.R. Pairing voltage-source converters with PI tuning controller based on PSO for grid-connected wind-solar cogeneration. Frankl. Open 2024, 8, 100138. [Google Scholar] [CrossRef]
- Naqvi, S.S.; Jamil, H.; Iqbal, N.; Khan, S.; Lee, D.I.; Park, Y.C.; Kim, D.H. Multi-objective optimization of PI controller for BLDC motor speed control and energy saving in Electric Vehicles: A constrained swarm-based approach. Energy Rep. 2024, 12, 402–417. [Google Scholar] [CrossRef]
- Idir, A.; Canale, L.; Bensafia, Y.; Khettab, K. Design and Robust Performance Analysis of Low-Order Approximation of Fractional PID Controller Based on an IABC Algorithm for an Automatic Voltage Regulator System. Energies 2022, 15, 8973. [Google Scholar] [CrossRef]
- Shi, J.Z. A Fractional Order General Type-2 Fuzzy PID Controller Design Algorithm. IEEE Access 2020, 8, 52151–52172. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Ouyang, H.; Mei, L. An Adaptive Super Twisting Nonlinear Fractional Order PID Sliding Mode Control of Permanent Magnet Synchronous Motor Speed Regulation System Based on Extended State Observer. IEEE Access 2020, 8, 53498–53510. [Google Scholar] [CrossRef]
- Frikh, M.L.; Soltani, F.; Bensiali, N.; Boutasseta, N.; Fergani, N. Fractional order PID controller design for wind turbine systems using analytical and computational tuning approaches. Comput. Electr. Eng. 2021, 95, 107410. [Google Scholar] [CrossRef]
- Gupta, D.K.; Dei, G.; Soni, A.K.; Jha, A.V.; Appasani, B.; Bizon, N.; Srinivasulu, A.; Nsengiyumva, P. Fractional order PID controller for load frequency control in a deregulated hybrid power system using Aquila Optimization. Results Eng. 2024, 23, 102442. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Colak, I.; Bizon, N.; Mosaad, M.I.; Tella, T.G. Power regulation of variable speed multi rotor wind systems using fuzzy cascaded control. Sci. Rep. 2024, 14, 16415. [Google Scholar] [CrossRef]
- Chaoui, H.; Khayamy, M.; Aljarboua, A.A. Adaptive Interval Type-2 Fuzzy Logic Control for PMSM Drives with a Modified Reference Frame. IEEE Trans. Ind. Electron. 2017, 64, 3786–3797. [Google Scholar] [CrossRef]
- Krishnama Raju, S.; Pillai, G.N. Design and Implementation of Type-2 Fuzzy Logic Controller for DFIG-Based Wind Energy Systems in Distribution Networks. IEEE Trans. Sustain. Energy 2016, 7, 345–353. [Google Scholar] [CrossRef]
- Alika, R.; Mellouli, E.M.; Tissir, E.H. A modified sliding mode controller based on fuzzy logic to control the longitudinal dynamics of the autonomous vehicle. Results Eng. 2024, 22, 102120. [Google Scholar] [CrossRef]
- Triviño, A.; López, A.; Yuste, A.J.; Cuevas, J.C. Decentralized EV charging and discharging scheduling algorithm based on Type-II fuzzy-logic controllers. J. Energy Storage 2024, 93, 112054. [Google Scholar] [CrossRef]
- Choon, N.H.; Cheah, Y.N.; Goh, O.S.; Choo, Y.H.; Basiron, H.; Kumar, Y.J. A Review on Automated Menu Planning Approaches. J. Comput. Sci. 2016, 12, 582–596. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | NB | NM | NS | ZE | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| du | ||||||||
| NB | NB | NB | NB | NB | NM | NS | ZE | |
| NM | NB | NB | NB | NM | NS | ZE | PS | |
| NS | NB | NB | NM | NS | ZE | PS | PM | |
| ZE | NB | NM | NS | ZE | PS | PM | PB | |
| PS | NM | NS | ZE | PS | PM | PB | PB | |
| PM | NS | ZE | PS | PM | PB | PB | PB | |
| PB | ZE | PS | PM | PB | PB | PB | PB | |
| Ps1 | Te (kN.m) | ||
|---|---|---|---|
| PI | Rise time Tr (s) | 0.0250 | 0.0247 |
| Settling time Ts (s) | 1.9999 | 1.9999 | |
| Peak overshoot (%) | 11.4219 | 11.0712 | |
| FOPID | Rise time Tr (s) | 0.0215 | 0.0213 |
| Settling time Ts (s) | 1.9999 | 1.9999 | |
| Peak overshoot (%) | 11.2458 | 10.9654 | |
| FLC | Rise time Tr (s) | 0.0016 | 0.0016 |
| Settling time Ts (s) | 1.9997 | 1.9997 | |
| Peak overshoot (%) | 3.8639 | 6.9401 |
| Controller | PI | FPID | FLC |
|---|---|---|---|
| THD | 1.51% | 1.21% | 0.93% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maafa, A.; Mellah, H.; Benaouicha, K.; Babes, B.; Yahiou, A.; Sahraoui, H. Fuzzy Logic-Based Smart Control of Wind Energy Conversion System Using Cascaded Doubly Fed Induction Generator. Sustainability 2024, 16, 9333. https://doi.org/10.3390/su16219333
Maafa A, Mellah H, Benaouicha K, Babes B, Yahiou A, Sahraoui H. Fuzzy Logic-Based Smart Control of Wind Energy Conversion System Using Cascaded Doubly Fed Induction Generator. Sustainability. 2024; 16(21):9333. https://doi.org/10.3390/su16219333
Chicago/Turabian StyleMaafa, Amar, Hacene Mellah, Karim Benaouicha, Badreddine Babes, Abdelghani Yahiou, and Hamza Sahraoui. 2024. "Fuzzy Logic-Based Smart Control of Wind Energy Conversion System Using Cascaded Doubly Fed Induction Generator" Sustainability 16, no. 21: 9333. https://doi.org/10.3390/su16219333
APA StyleMaafa, A., Mellah, H., Benaouicha, K., Babes, B., Yahiou, A., & Sahraoui, H. (2024). Fuzzy Logic-Based Smart Control of Wind Energy Conversion System Using Cascaded Doubly Fed Induction Generator. Sustainability, 16(21), 9333. https://doi.org/10.3390/su16219333