Abstract
The study aims to develop and assess an algorithm for efficiently generating parking spot layouts within predefined area outlines. The algorithm is an attempt to streamline the decision-making process by producing different design variants and optimizing the utilization of available space. The algorithm’s primary objective is to streamline decision-making by generating diverse design variants while optimizing the use of available space, with a distinct focus on mitigating environmental impact and fostering ecological well-being. Researchers conduct thorough tests on the algorithm across various outlines, resulting in multiple layout options for each scenario. They analyzed five representative parking locations and compare the algorithm’s results with the existing parking spot layouts. Throughout the evaluation process, they consider quantitative and qualitative data, considering the complexities of communication solutions within each context. The study findings indicate that the algorithm demonstrates comparable or superior performance to existing solutions. Overall, the study highlights the promising potential of algorithmic design approaches in the context of parking lot automated design. Achieving a balance between innovative designs and user-friendly layouts is crucial, and this is achievable by conducting comprehensive analyses that consider various factors. The consistent findings underscore the algorithm’s potential to significantly contribute to sustainable design practices in parking lot layouts, highlighting decreased environmental strain, efficient land use, and creating urban spaces that prioritize ecological benefits. Furthermore, seamlessly integrating algorithmic solutions with existing communication systems is paramount to ensure practical applicability in real-world scenarios. This integration will enable more effective and practical implementation of the algorithm’s outputs in actual parking lot design projects.
1. Introduction
The design of parking lots has been a long-standing subject of research [1,2], driven by the objective to optimize space utilization while ensuring efficiency and adaptability to evolving requirements and digital solutions for enhanced spatial efficiency [3,4,5]. This paper examines algorithmic design approaches for automating the parking lot design process and explores their advantages and disadvantages [6]. Algorithmic composition in parking lots offers manifold benefits [7]. One significant advantage is the substantial increase in parking capacity within a given spatial footprint, effectively addressing the ever-growing demand for parking spaces. Additionally, algorithmic design allows for quick and streamlined solutions, reducing the time required for design iterations and implementation [8,9,10]. Such an approach exhibits inherent flexibility, empowering designers to easily modify the layout by adjusting parking lines’ arrangement to accommodate diverse spatial constraints and user demands. Generating numerous design variants through algorithmic approaches optimizes parking lot layouts and facilitates tailoring the design to specific needs, enhancing overall efficiency and user experience [11]. The algorithmic design offers promising potential for revolutionizing how parking lots are conceptualized and realized, ultimately leading to more effective space utilization, therefore achieving the sustainability goals.
Moreover, algorithmic design methods offer significant advantages [12]. One primary concern is the departure from natural patterns and configurations, which can lead to increased complexity in user navigation and memorization of parking layouts. A more balanced approach is required to address this, maximizing parking capacity and analyzing optimal access routes, pedestrian pathways, and overall traffic optimization. Particular attention should be given to access roads to the facility’s entrance to minimize potential pedestrian–vehicle interactions, even if such layouts contradict common standards observed in chain supermarkets. Additionally, specific criteria governing cultural patterns and geographical spaces should be considered when employing algorithmic design methodologies [13]. In the architectural design process, multiple stages demand thorough consideration and management. Among these stages, early stage design involving the configuration and adjustment of functional elements is of utmost importance [14].
During this phase, a simplified version of the project is tested, adjusted, and analyzed [15,16]. Typically, this process takes a considerable amount of time. However, by integrating algorithms, the efficiency of this stage can be improved significantly. Algorithmic-created projects and automated solutions minimize errors, allowing for seamless changes at any stage without requiring manual redraws or modeling for each version [17,18]. The design process, while beneficial, inherently involves presumptions that stem from preferred design approaches and guiding assumptions [19,20,21]. These factors play a crucial role in shaping an individualized design process; however, they do not guarantee design efficiency, which remains a primary goal in many design tasks. On the other hand, algorithmic design operates within predefined boundaries and preset rules, aiming for the objective of design efficiency as a priority [22,23].
In this context, the primary objective of the present study was to develop and evaluate an algorithm capable of automatically generating parking spot layouts within predetermined area outlines. The manual creation of such arrangements is not only time-consuming but also cost-intensive. Thus, the proposed algorithm was designed to streamline the decision-making process by efficiently generating diverse design variants and optimizing the utilization of the available space. This research underscores the significance of adopting a holistic approach when employing algorithmic design for parking lots. It highlights the importance of comprehensive evaluations focusing on enhanced parking capacity and factors such as user experience, safety considerations, and efficient traffic flow. By striking a balance between space utilization and user-centric design principles [24], this study aims to contribute to advancing automated algorithmic approaches in parking lot design.
The paradigm of computational design has evolved from replicating identical copies to algorithmic adaptation in architectural design [25]. One innovative approach within this paradigm is parametric design, as discussed by Schumacher [26]. This approach treats geometric properties as variables, enabling the generation of numerous design variations through an evolutionary algorithm with a cyclical evaluation and selection process. This feature contributes to enhanced design process efficiency and the ability to reconcile conflicting design priorities, such as creative and unexpected outcomes, alongside analytical rationality. Frazer introduces the concept of evolutionary architecture [27], challenging the traditional approach where architects directly conceive their designs in their minds. Instead, Frazer proposes formulating design concepts as rules governing the generation of architectural form. Iteratively applying these rules results in diverse architectural forms that evolve and adapt over time [27,28,29]. It should be stressed that such approaches are often inspired and based on research regarding evolutionary and genetic algorithms conducted by Holland and Goldberg [30,31].
The shift towards computational design and algorithms allows for the freedom to iterate forward and backward without compromising design process efficiency and control [32,33]. Performance-based design becomes attainable, leading to more effective use of space and materials [33,34]. While parking lot design is often neglected or treated as an additional task, its impact on user experience and spatial perception is significant [35]. Considering landscapes and their value in designing parking layouts is essential to creating spaces that harmoniously integrate with their surroundings [36,37]. Furthermore, the sustainable use of space in parking lot design can be evaluated using big data, challenging traditional modernist planning approaches and offering new perspectives [38,39]. The search for accurate design solutions can be enhanced through digital technologies and algorithmic approaches, which allow for more significant variation and a better understanding of potential solutions [40,41]. This approach enables precise customization of the final design based on user requirements and contextual factors, leading to a proliferation of non-identical artifacts. This research aims to uncover these concepts’ implications and potential applications in architectural practice and beyond.
This research aims to create and analyze a PoC (proof of concept) algorithm that searches for the layout that generates maximum number of parking spots within the given boundary. Even though the presented algorithm has many limitations, and its result is not a ready-to-use design, it can become a support tool in decision-making. Together with the architect’s supervision and creativity, it can lead to more effective and sustainable design solutions. After all, alongside other wastes, the waste of space significantly impacts reasonable usage of the environment. The presented solution can minimize the space necessary to create a given number of parking spots and save it for environmentally friendly usage, such as green areas. The environmental gains consist of more green bio-active spaces and more effective solutions to help minimize the material needed to create the parking lot. The proposed algorithm, supported by quantitative analysis and the comparison with human-made solutions, provides a valuable voice in the discussion regarding automating design processes in the AEC (architecture, engineering, and construction) industry. The comparison to the created solution verifies the proposed solutions’ efficiency and gives a strong benchmark point for comparisons and possible applications in the future.
2. Materials and Methods
Developing the algorithm for repetitive design tasks, when explicitly focusing on parking space layouts in diverse locations, involved a series of crucial decisions shaped by principles of creativity and universality. The goal was to devise an algorithm that could be universally applied across various sites, necessitating establishing a core set of rules defining the architectural form. This approach aligns with Carpo’s notion of design [25] comparability in responsive websites and draws insights from Schumacher’s discussions on Parametricism [26,42,43] as well as the concept of induction design formulated by Watanabe [44]. The algorithm formulation for optimizing parking space layouts in diverse locations was based on rigorous prior analyses and careful considerations, culminating in establishing fundamental principles to guide its development. One of these essential principles involves organizing parking spaces in a perpendicular arrangement along the entire perimeter of the designated area. This layout choice is driven by maximizing space utilization and providing convenient vehicle access. By adopting a perpendicular configuration, the algorithm aims to efficiently allocate available space, accommodating more parking spots while ensuring ease of maneuverability for drivers.
Furthermore, introducing a peripheral road surrounding the parking spots is critical to the algorithm’s design. The peripheral road serves the purpose of enabling smooth circulation and connectivity within the parking layout. This circulation pattern enhances traffic flow and accessibility, ensuring a well-organized and efficient parking environment. In filling the remaining interior space of the designated area, the algorithm incorporates parallel double rows of parking spaces, which are effectively separated by access roads. This design approach further maximizes the number of available parking spaces, thereby increasing the overall parking capacity of the area. The algorithm aligns the inner rows of parking spaces with one or two directions of the sections forming the plot outline. This alignment strategy creates a sense of order and unity within the layout, enhancing the parking space arrangement’s overall aesthetic appeal and functionality. Finally, any remaining open areas adjacent to the perimeter road are utilized by creating parallel parking spaces. This strategic use of available space further contributes to the overall parking capacity, efficiently using every available area. The algorithm provides a versatile and universally applicable solution for optimizing parking space in diverse locations by adhering to these fundamental principles. Its scientific underpinnings and consideration of space utilization, circulation efficiency, and design coherence align with modern computational design methodologies, offering promising implications for architecture and urban planning. Several simplifications were introduced to facilitate the research and streamline the algorithm development process, each enhancing the proposed algorithm’s efficiency and applicability for parking space layout optimization. The first simplification involves assuming an adequate road width that allows vehicles to maneuver without additional turning radii. This assumption enables the algorithm to be implemented across various locations without requiring extensive adjustments to accommodate different road dimensions. The algorithm can efficiently allocate parking spaces by assuming an appropriate road width while ensuring seamless traffic flow.
Another simplification entails considering all parking spaces to be uniform in size without accounting for specific areas designated for disabled individuals. This decision results in a consistent layout that simplifies the computational process. However, it is worth noting that real-world applications may necessitate adaptations to accommodate specific accessibility requirements for accessible parking spaces, highlighting a potential area for further refinement in practical implementations. In the interest of computational simplicity, the algorithm development did not consider any potentially present artifacts in the area, focusing solely on the parking layout. While this simplification streamlines the computational approach, it is essential to acknowledge that real-world implementations require consideration of existing structures and features. Incorporating such elements into the algorithm would lead to a more comprehensive and contextually aware parking space layout solution. Based on the fundamental principles and simplifications, the proposed algorithm aims to enhance the efficiency and universality of parking space layouts in diverse locations. By employing computational techniques, the research contributes to the evolving field of computational design, unlocking its potential applications in architecture and urban planning. As the algorithm continues to be refined and adapted for real-world scenarios, it holds promise in optimizing parking infrastructure for enhanced user experience and overall urban efficiency. The sample solution was developed using industry-standard 3D design software, McNeel’s Rhinoceros (version 7 SR32, 7.32.23221.10241, 2023-08-09), and a visual algorithm editor, Grasshopper (version 9 August 2023 10:24, Build 1.0.0007). Specific components were implemented using the C# programming language to enhance the algorithm’s flexibility and functionality. The programming process was facilitated by Microsoft Visual Studio (2022 Version 17.6.0), enabling real-time debugging and streamlined code maintenance. The algorithm consists of simple step-by-step instructions that generate the final solution. During the first step, boundary spots are created using the directions existing in the boundary polyline. Then, the algorithm adds additional spots at the corners where it is possible. During the next step, the inner grid of spots is created. The grid uses one, two, or more directions in the plot boundary, based on which is the most efficient algorithm goal, maximizing the number of spots. Finally, the algorithm tests if adding some parallel spots around the boundary street are possible. The algorithm allows for multiple directions and angles of created spots; however, conducted analysis proved that spots perpendicular to the communication axis are the most efficient.
Given the limited number of potential solutions and the exploratory nature of the research, a brute-force approach was chosen for the optimization process. The process can be supported with an optimization algorithm if the complexity grows with its further development. The algorithm generates as many options as the number of lines that create the boundary polyline using one directional grid. Then, it makes the same additional number of options using two directions. Finally, the one with the highest number of spots is chosen. Yet the designing team has insight into all the possibilities and can pick or adapt any other solution.
While exhibiting notable strengths, the adopted algorithm reflects certain limitations that were intentionally excluded during its development as part of the proof of concept stage. Notably, factors such as sidewalks and entrances to buildings, pivotal for pedestrian pathways and overall accessibility, were temporarily omitted to simplify the initial algorithmic framework. Similarly, the decision to overlook existing tall greenery, the potential for changing entrance locations. These exclusions, made at this early stage, provide a foundation for future refinement and adaptation, allowing for a more targeted and nuanced approach as the algorithm evolves in subsequent phases of development.
In the subsequent stages of algorithm refinement, several key enhancements can be implemented to address the identified limitations and incorporate essential elements. Firstly, a more comprehensive dataset that includes information on sidewalks, entrances to buildings, and existing tall greenery should be integrated, allowing for a more detailed representation of urban landscapes. Additionally, the algorithm should be adapted to accommodate changes in entrance locations, promoting flexibility and responsiveness to dynamic urban environments. In the ongoing refinement stages of the algorithm, it is imperative to extend its inclusivity by addressing diverse parking needs. This encompasses not only spaces designated for individuals with disabilities but also provisions for family-oriented parking areas and designated zones for campers. Integrating these considerations will contribute to creating urban spaces that are accommodating and accessible to a wide range of users. Moreover, accounting for environmental factors, such as water runoff analyses, can be integrated to enhance the algorithm’s sustainability considerations. These refinements will contribute to a more holistic and adaptable algorithm better suited to address the complexities of urban planning while incorporating crucial environmental concerns. By leveraging these advanced software tools and coding techniques, the development of the algorithm was underpinned by scientific rigor and methodical experimentation. Integrating the 3D design software, algorithm editor, and programming language ensured a well-rounded and robust solution for the repetitive design task. Implementing an optimization algorithm further enhanced the algorithm’s performance, providing valuable insights into the relationships between design parameters and resulting layouts. This scientific approach lays the foundation for future advancements in computational design and its applications in architecture and urban planning.
The research paper delves into algorithmic design approaches to address the time-consuming and cost-intensive manual creation of parking lot layouts. The primary objective is to develop an algorithm capable of efficiently generating diverse design variants and optimizing the utilization of available space. The research method (Figure 1) involves several key steps. Firstly, a comprehensive literature review explores existing optimization methods and algorithmic design software across various disciplines, particularly architecture and urban planning. This review provides valuable insights into methods and tools that can be adapted for automating the parking lot design process. A literature review on parking design principles and best practices is conducted to establish a foundation for determining the fundamental rules and regulations guiding the algorithmic design process. Various layout configurations, space utilization techniques, and successful approaches employed to create efficient parking areas are studied in this context.
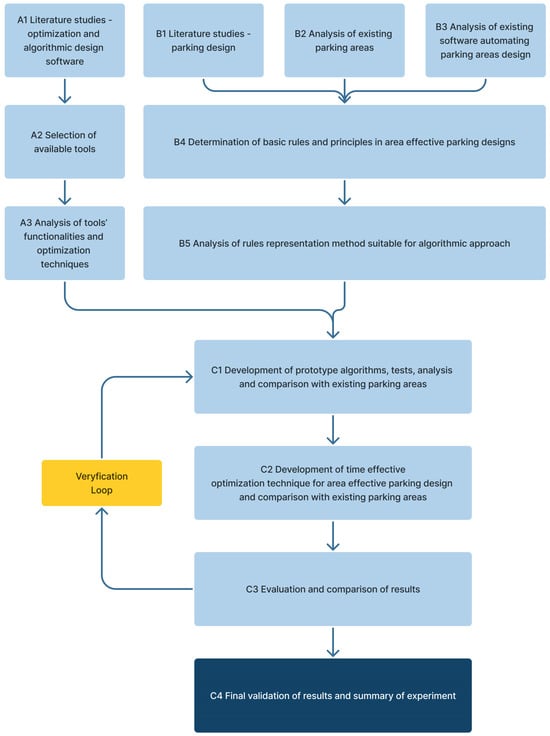
Figure 1.
Research design—method explanation diagram.
The research study conducted an in-depth analysis of 50 existing parking areas to gain insights into their layouts, utilization patterns, and prevailing challenges. This analysis aimed to identify common design patterns and potential areas that could benefit from algorithmic automation. Large-scale open space organized parking areas characterize all the selected cases for comparison. The selection was based on the fact that the automated design’s advantages are evident in large-scale repetitive tasks. The limitation of the study regarding the selection of large-scale objects was also based on the preliminary research that has shown that small-scale parking lots are well-designed and need to allow for further improvements. However, the proposed method can be applied to all scales of parking. The existing car parks are located in well-developed urban areas in the European Union and the USA near airports and supermarkets.
During the first research phase, the algorithm prototype was rigorously tested using a diverse set of five different geometric boundaries. This set included two rectangular parking areas and three polylines containing concave and convex corners. For the next evaluation phase, 30 real-world parking plot boundaries were selected to validate the algorithm’s performance in practical scenarios. Out of these 30 boundaries, 15 were carefully chosen for repetitive regular benchmarking, enabling thorough optimization and debugging of the algorithm. After fine-tuning the algorithm, the research paper presents a comparative analysis between the algorithm’s outcomes and data collected from five representative real parking locations. The comparison is based on specific metrics, such as parking space utilization efficiency, layout accuracy, and overall algorithm functionality. Moreover, the algorithm showcased robust performance in handling complex geometric boundaries, such as concave and convex corners, ensuring practical applicability. The study validates the algorithm’s effectiveness in optimizing parking area layouts and addresses challenges related to parking space utilization, providing valuable insights for future automated parking design systems.
Next, relevant software tools are carefully selected based on the findings from the literature review, aligning them with the research objectives. These tools facilitate algorithmic design and optimization tasks in the context of parking lot layout generation. The chosen software tools are then subjected to in-depth analysis to investigate how each can effectively generate parking spot layouts within predetermined area outlines. Understanding the capabilities of these tools is crucial for their successful integration into the proposed algorithmic approach. The researchers critically assess existing software tools to automate parking area design and compare them against the research objectives. This assessment is made to identify potential limitations and gaps that the proposed algorithm can address. Drawing from the literature review on parking design and analyzing existing parking areas, the researchers determine the fundamental rules and principles contributing to area-effective parking lot designs. These rules serve as guidelines to generate optimized parking layouts. Various methods for representing the determined rules in an algorithmic approach are analyzed. A suitable representation method is selected, and automated generation and optimization of parking spot layouts within predetermined area outlines. Prototype algorithms are developed based on the selected tools and established rules. These algorithms automatically generate and optimize parking spot layouts following the defined principles. Extensive testing, analysis, and comparison with existing parking areas are conducted to evaluate the performance and effectiveness of each algorithm.
The final step focuses on enhancing the area-effective parking layouts generated by the prototype algorithms. A time-effective optimization technique is developed further to optimize the parking layouts within the predetermined area outlines. The performance of this optimization technique is then evaluated and compared with existing parking areas to assess its effectiveness and efficiency. The present research is centered on meticulously evaluating and comparing acquired results. In cases where discrepancies or inaccuracies were encountered, a methodical procedure was implemented to refine and enhance the prototype algorithm. Subsequently, a comprehensive validation process encompassed the entirety of the research, culminating in a succinct summary that facilitates the identification of significant findings and the proposal of novel directions for future research endeavors within the domain. The research aims to achieve parking lot automated design and efficient generation of diverse design variants while optimizing space utilization. The proposed algorithm has the potential to streamline decision-making processes and significantly reduce the time and costs associated with manual parking lot layout creation.
3. Results
This study aimed to develop and evaluate an algorithm that efficiently generates parking spot layouts within predefined area outlines. The manual creation of such arrangements is known to be time-consuming and resource-intensive. Therefore, the proposed algorithm aimed to streamline the decision-making process by generating design variants and optimizing the utilization of available areas. The algorithm underwent thorough testing on various outlines, resulting in various layout variants for each case, depending on the complexity of the boundary. Specifically, for the locations analyzed in this paper, the algorithm generated between 30 and 54 variants for each case (Figure 2).
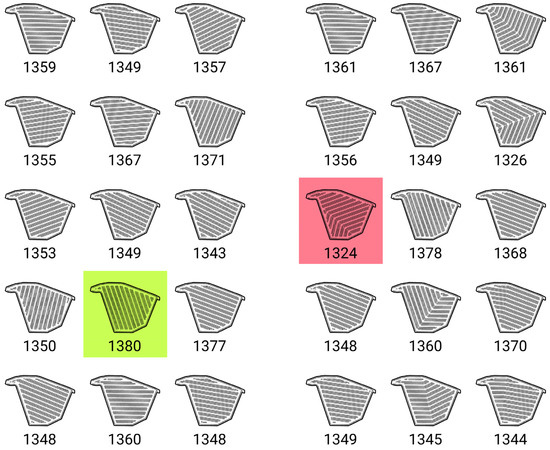
Figure 2.
The complete set of parking layouts generated by the algorithm for one location with numbers of parking spots achieved; best solution highlighted in green, the worst one highlighted in red color.
The layouts of inner parking spots were generated in one or two dominant directions (Figure 3). The study selected five representative parking locations for analysis, and the algorithm’s results were compared with the existing layouts of parking spots. Notably, the generated solutions closely resembled the dimensions of parking spaces and internal streets in real-world locations, highlighting their practical applicability.
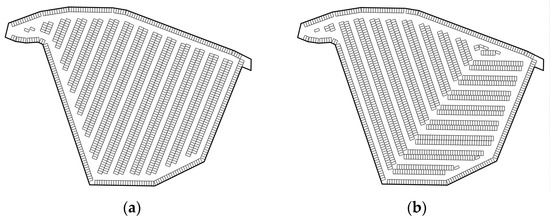
Figure 3.
Parking layouts are generated by the algorithm using: (a) One direction; (b) Pair of directions.
Furthermore, in the algorithm’s results, peripheral spots were removed to establish access to public roads, mirroring the existing layout. The analysis encountered challenges in directly comparing the number of parking spots generated by the algorithm with the existing spots, owing to the algorithm’s layout simplification and the impact of local conditions. As a result, quantitative and qualitative data were considered during the evaluation process, and particular attention was paid to the complexities of communication solutions, especially regarding links between the car park and the existing road system. Results were analyzed for each of the five car parks, presenting the minimum and maximum capacities achieved for each plot and comparing them with the actual capacity of the respective car parks (Table 1). Adjustments were made in counting existing spots, considering artifacts such as trees occupying parking spaces and accounting for additional spots allocated for disabled or family parking. Due to the “proof of concept” character of the testing algorithm, such adjustments were necessary to make comparison possible.

Table 1.
The table comparing the number of spots delivered by the algorithm with the existing one.
Across all analyzed cases, the algorithm demonstrated comparable or superior performance to the existing solutions. For instance, the Mohegan Lake parking lot exhibited equal parking spaces between the algorithm’s output and the existing layout. In contrast, the parking lot at Szczęśliwa Street in Gdansk yielded 484 more spaces through the algorithm’s optimized layout. The authors emphasized that adequate parking space arrangements not only increase the number of spots but also have the potential to expand green areas while maintaining the same parking plot capacity. To demonstrate this, the “area per parking spot” ratio was computed alongside calculating biologically active areas that could be achieved with a more effective parking layout. This computation multiplied the additional spots by the area per spot ratio obtained from the algorithm’s best solution (Figure 4). Finally, the existing green areas within boundaries were subtracted from these values. The layouts generated by the algorithm have more potential for green space after the revision by the architect, especially at the corners. But even without it, they significantly increase possible green areas in most of the cases.
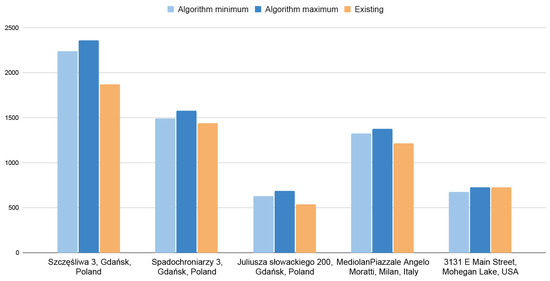
Figure 4.
The chart comparing the number of spots delivered by the algorithm with the existing one.
The study’s results highlight the algorithm’s effectiveness in optimizing parking spot layouts, leading to improvements in parking area efficiency and potential additional green space in various locations (Table 2).
Table 2.
The table compares the “area per spot” ratio and possible additional green areas.
At Szczęśliwa 3 in Gdańsk (Figure 5), the algorithm’s best layout achieved an “Area per spot” ratio of 22.00 square meters, compared to the existing 27.68 square meters. This indicates a notable increase in parking efficiency, and the algorithm’s layout design could potentially create an additional green area of 9160.85 square meters. The potential for increased capacity by altering the main direction of inner parking spots is represented in this example. The algorithm’s suggested direction appears to align more naturally with pedestrian flow compared to the existing layout, which currently features pathways for pedestrians along the longer edge of the plot, approximately at its midpoint. However, parked cars sometimes obstruct these pathways, hindering pedestrian movement. Adopting the algorithm-generated layout could potentially resolve this issue, as the algorithm’s optimized direction could offer improved pedestrian accessibility and flow within the parking area. This finding highlights the algorithm’s capability to address practical challenges related to parking space utilization and pedestrian movement, making it a promising solution for enhancing the efficiency and functionality of parking plots.
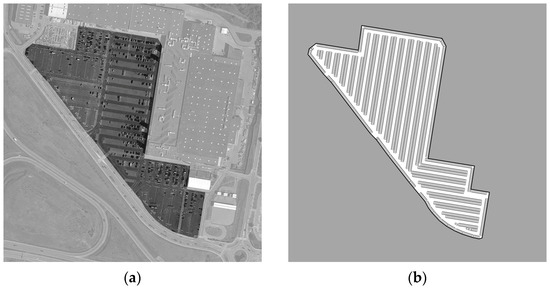
Figure 5.
Comparison of parking layouts, location: Szczęśliwa 3, Gdańsk, Poland: (a) Existing solution with 1875 parking spots; (b) best solution generated by the algorithm with 2359 parking spots (484 more spots or 9160.85 square meters of green area). Input parameters—street width: 600 cm, spot width: 500 cm, spot length: 600 cm.
Similarly, at Spadochroniarzy 3 (Figure 6), Juliusza Słowackiego 200 in Gdańsk (Figure 7), and MediolanPiazzale Angelo Moratti in Milan (Figure 8), the algorithm’s optimized layouts demonstrated reduced “Area per spot” ratios, indicating enhanced parking efficiency and the potential for additional green space expansion, even including the fact that there are already some green areas within the boundaries of existing solutions. The possible additional green areas for these locations were 2986.38 square meters, 1988.30 square meters, and 2656.59 square meters, respectively. Altering the main direction of inner parking spots can lead to a significantly larger capacity, with the algorithm’s suggested direction being more suitable for pedestrian flow compared to the existing layout. Pedestrian pathways along the longer edge of the plot, while theoretically present, are often obstructed by parked cars. Implementing the algorithm’s layout may resolve this issue and enhance pedestrian accessibility. Parking behavior indicates that individuals tend to park on green areas within turning radii, highlighting the need for improved design solutions to optimize parking spaces and utilize available area effectively.
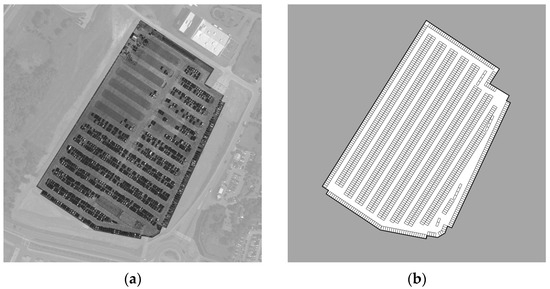
Figure 6.
Comparison of parking layouts, location: Spadochroniarzy 3, Gdańsk, Poland: (a) Existing solution with 1439 parking spots; (b) best solution generated by the algorithm with 1577 parking spots (138 more spots or 2986.38 square meters of green area). Input parameters—street width: 600 cm, spot width: 250 cm, spot length: 500 cm.
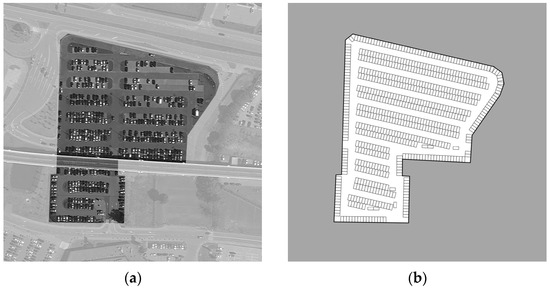
Figure 7.
Comparison of parking layouts, location: Juliusza Słowackiego 200, Gdańsk, Poland: (a) Existing solution with 537 parking spots; (b) Best solution generated by the algorithm with 690 parking spots (153 more spots or 1988.30 square meters of green area). Input parameters—street width: 600 cm, spot width: 250 cm, spot length: 500 cm.
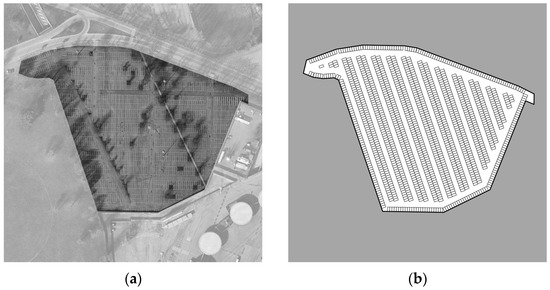
Figure 8.
Comparison of parking layouts, location: Piazzale Angelo Moratti, Milan, Italy: (a) Existing solution with 1216 parking spots; (b) Best solution generated by the algorithm with 1380 parking spots (164 more spots or 2656.59 square meters of green area). Input parameters—street width: 600 cm, spot width: 250 cm, spot length: 500 cm.
However, at 3131 E Main Street in Mohegan Lake (Figure 9), the analysis of the parking plot presents a unique scenario, as the algorithm’s results yielded a capacity identical to the existing layout. The current number of spots matched the algorithm’s best result, 727. Since the site already contains green areas, it results in a negative value of additional green space. However, it is essential to note that the existing parking uses the road outside the tested lot. The result, in this case regarding greenery, does not give referral values. Nevertheless, an intriguing observation is that the algorithm-generated layout closely resembles the actual layout at this site. In this case, the primary challenge is interpreting the local communication system with the parking plot boundary. An in-depth examination of the communication system’s influence on the parking plot design sheds light on the complex interplay between the existing infrastructure and the algorithm’s optimization process. The close similarity between the algorithm’s layout and the real-world layout suggests that the local communication system plays a significant role in shaping the parking space arrangement. The case of Mohegan Lake underscores the importance of considering and interpreting local contextual factors while deploying algorithmic solutions for parking optimization. In practice, harmonizing the algorithm with existing communication systems proves essential for achieving seamless integration and practical applicability. The algorithm’s application in optimizing parking spot layouts led to improved parking efficiency in most locations and offered the potential for increased green spaces. The findings underscore the algorithm’s practical applicability in creating more sustainable and efficient parking solutions in urban environments.
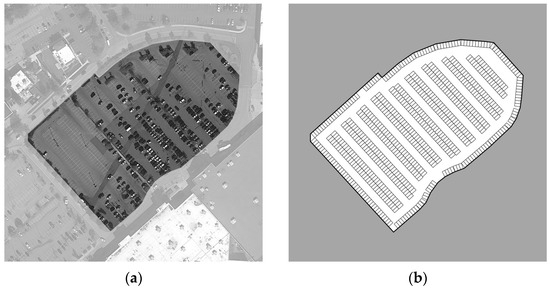
Figure 9.
Comparison of parking layouts, location: 3131 E Main Street in Mohegan Lake, NY, USA: (a) Existing solution with 727 parking spots; (b) Best solution generated by the algorithm with 727 parking spots (equal as existing). Input parameters—street width: 770 cm, spot width: 275 cm, spot length: 550 cm.
4. Discussion
The design of parking lots has traditionally been a complex and time-consuming process, requiring meticulous planning and consideration of various factors. However, introducing algorithmic design approaches offers advantages for parking lot automated design. This section discusses the benefits and drawbacks of algorithmic design methods, highlights the importance of comprehensive analyses, and emphasizes the need to balance space utilization and user-centric design principles. One of the notable advantages of algorithmic design in parking lots is its ability to significantly increase parking capacity within a given spatial footprint. By leveraging algorithms, designers can optimize the arrangement of parking lots and address the pressing issue of the growing demand for parking spaces in urban areas. This feature of algorithmic design is particularly beneficial in land-constrained areas, where efficient space utilization is critical. Another critical advantage of algorithmic design is its capacity for quick and streamlined solutions. Automating the design process reduces the time required for design iterations and implementation. Designers can generate multiple design variants efficiently, facilitating rapid decision-making and accelerating the overall design process. This time-saving aspect of algorithmic design enables designers to meet tight project timelines and adapt to changing requirements effectively.
In environmental considerations and sustainability, this research emphasizes the pivotal role of effective urban space utilization in fostering positive ecological outcomes. The algorithm can be a driving force for a more sustainable and environmentally friendly design by optimizing parking space allocation and integrating green areas within urban planning. Incorporating designated parking spaces for individuals with disabilities, family-friendly zones addresses immediate parking needs and reduces the ecological footprint associated with expansive parking lots. Simultaneously, the algorithm’s promotion of green spaces contributes to sustainability mitigating the urban heat island effect. The algorithm’s strategic approach to parking and green space allocation represents a significant stride towards achieving a more sustainable and ecologically conscious urban design.
Flexibility is another significant benefit offered by algorithmic design in parking lot design. The ability to easily modify the layout by adjusting the arrangement of parking lines allows designers to accommodate different spatial constraints and user demands. This flexibility ensures that the parking lot design can be tailored to specific needs and optimized for different contexts. Designers can experiment with various layouts and configurations to achieve the most efficient use of space while considering accessibility, traffic flow, and user convenience. However, algorithmic design methods have certain drawbacks. The primary concern is the departure from natural patterns and configurations in parking lot layouts. While algorithmic design can maximize parking capacity, the resulting layouts may deviate from traditional patterns that are familiar to users. This departure from applied patterns can introduce complexity and potential challenges for users regarding navigation and memorization of parking layouts. Designers must balance innovative designs and user-friendly layouts, ensuring that the parking lot remains intuitive and easy to navigate.
Moreover, the prevailing focus on maximizing parking capacity should include fundamental analyses of optimal access routes, pedestrian pathways, and overall traffic optimization. While algorithmic design can efficiently generate parking lot layouts, considering factors beyond capacity, such as pedestrian safety and efficient traffic flow, is essential. For instance, the orientation of access roads perpendicular to the facility’s entrance is ideal for minimizing pedestrian-vehicle interactions. However, this design principle may conflict with common layout standards observed in chain supermarkets. Therefore, a comprehensive, holistic analysis incorporating various considerations is crucial to balance parking capacity and user experience. This study emphasizes the importance of incorporating comprehensive analyses prioritizing enhanced parking capacity while encompassing user experience, safety considerations, and efficient traffic flow. By considering these factors, designers can create parking lot designs that maximize space utilization and provide drivers and pedestrians with a seamless and user-friendly experience.
This research aligns with the prevailing trend of advancing digital tools that augment the design process, with notable comparisons to the evolving TestFit platform. TestFit operates concurrently with the proposed solution, offering a dynamic platform for generating conceptual designs for various architectural and urban structures, including housing, hotels, and parking facilities. The presented algorithm shares similarities with TestFit’s parking creator, as both generate boundary spots and a regular grid of spaces within. Among other available software, ParkCad (version 5.0) also allows for the automation of parking design, such as TestFit (version 4.4.0). While TestFit and ParkCad incorporate additional features such as fillet radius, the algorithm maximizes available parking spots. It achieves this by blending perpendicular and parallel parking orientations and combining multiple main connected directions to generate inner grids. Despite their nuanced differences, both solutions exemplify tools designed to automate and support repetitive design tasks. TestFit and the presented algorithm showcase the potential for streamlining the design process through digital tools. Further advancements and the development of such solutions are expected, signifying a continued trajectory toward more sophisticated and efficient digital tools for architectural and urban design.
5. Conclusions
This research investigates the merits and drawbacks of algorithmic design methodologies in the context of parking lot automated design. Advantages include augmented parking capacity, streamlined solutions, and increased flexibility. By leveraging algorithms, designers can optimize the utilization of parking spaces and effectively address the growing demand for parking facilities. Furthermore, the automated design process reduces the time required for design iterations and implementation, thus enhancing efficiency.
Achieving a balance between innovative designs that maximize parking capacity and user-friendly layouts that prioritize ease of use is imperative. Comprehensive analyses are pivotal in algorithmic design for parking lots, extending beyond mere capacity considerations. These analyses include optimal access routes, pedestrian pathways, and traffic flow optimization. By integrating these elements, the parking lot design can optimize capacity while emphasizing user experience, safety, and efficient traffic management. Digital architecture helps to create complex content with algorithms that architects and designers can use. Parametric and algorithmic design are terms describing the use of computational design methods. Parametric design can be associated with generative design, in which, in a sense, the architectural form is the joint work of the architect and an algorithm. Digital algorithms express the architect’s concept directly, whereas algorithmic techniques can only be used in a selected design work area. Automating the drawing process allows more focus on the project’s goal. On the other hand, such action also has disadvantages, such as fully trusting in automation, repeating the form, and needing more individuality.
Author Contributions
Conceptualization, J.C. and M.N.; methodology, J.C.; software, M.N.; validation, J.C. and M.N.; formal analysis, J.C.; investigation, J.C. and M.N.; resources, M.N.; data curation, M.N.; writing—original draft preparation, J.C. and M.N.; writing—review and editing, J.C. and M.N.; visualization, M.N.; supervision, J.C.; project administration, J.C.; funding acquisition, J.C. and M.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Narodowe Centerum Badań i Rozwoju, grant number nr POIR.01.01.01-00-0900/21. Project name: Stworzenie technologii umożliwiającej za pomocą algorytmów na komputerową analizę nieruchomości i maksymalizację jej wykorzystania na cele Hotelowe. Project co-financed by the European Union from the European Regional Development Fund under the Działanie 1.1 Projekty B+R przedsiębiorstwa, Poddziałanie 1.1.1 Badania przemysłowe i prace rozwojowe realizowane przez przedsiębiorstwa, Pogram Operacyjny Inteligentny Rozwój. The APC was funded by Cracow University of Technology and Jan Cudzik.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The research would not be possible without the entire Outline AI team, especially research and development team: Alan Szawarski, Pawel Unger, Victor Moczarski, Adrianna Ebertowska, Samuel Kozlowski and Jakub Madey.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Hill, J.; Rhodes, G.; Vollar, S.; Whapples, C. Car Park Designers’ Handbook; Thomas Telford: Reston, VA, USA; London, UK, 2005. [Google Scholar]
- McDonald, A.I.; Sanders, S. The Parking Garage. Design and Evolution of a Modern Urban Form; Urban Land Institute: Washington, DC, USA, 2007. [Google Scholar]
- Wada, M.; Yoon, K.S.; Hashimoto, H. Development of advanced parking assistance system. IEEE Trans. Ind. Electron. 2003, 50, 4–17. [Google Scholar] [CrossRef]
- Xue, J.; Wang, J.; Yi, J.; Wei, Y.; Huang, K.; Ge, D.; Sun, R. Optimal Parking Path Planning and Parking Space Selection Based on the Entropy Power Method and Bayesian Network: A Case Study in an Indoor Parking Lot. Sustainability 2023, 15, 8450. [Google Scholar] [CrossRef]
- Chen, T.; Sun, C. An Optimization Design of Hybrid Parking Lots in an Automated Environment. Sustainability 2023, 15, 15475. [Google Scholar] [CrossRef]
- Aranburu, A.; Cotillas, J.; Justel, D.; Contero, M.; Camba, J.D. How does the modeling strategy influence design optimization and the automatic generation of parametric geometry variations? Comput. Aided Des. 2023, 151, 103364. [Google Scholar] [CrossRef]
- Motta, E.; Zdrahal, Z. Parametric design problem solving. In Proceedings of the 10th Knowledge Acquisition for Knowledge-Based System Workshop, Banff, AB, Canada, 9–14 November 1996. [Google Scholar]
- Assasi, R. Parametric Design, A Historical and Theoretical Overview. In Proceedings of the International Conference on Emerging Technologies in Architectural Design (ICETAD2019), Department of Architectural Science of Ryerson University, Toronto, ON, Canada, 17–18 October 2019. [Google Scholar]
- Yi, H.; Yi, Y.K.; Chan, T. Performance Based Architectural design optimization: Automated 3D space Layout using simulated annealing. In Proceedings of the 2014 ASHRAE/IBPSA-USA Building Simulation Conference, Atlanta, GA, USA, 10–12 September 2014; pp. 292–299. [Google Scholar]
- Caetano, I.; Leitao, A. Architecture meets computation: An overview of the evolution of computational design approaches in architecture. Archit. Sci. Rev. 2020, 63, 165–174. [Google Scholar] [CrossRef]
- ten Teije, A.; van Harmelen, F.; Schreiber, A.T.; Wielinga, B.J. Construction of problem-solving methods as parametric design. Int. J. Hum. Comput. Stud. 1998, 49, 363–389. [Google Scholar] [CrossRef]
- Kolarevic, B.; Malkawi, A. Performative Architecture: Beyond Instrumentality; Routledge: Abingdon-on-Thames, UK, 2005. [Google Scholar]
- Nessel, M. The relationship between cultural and geographic parameters in algorithmic design–sample algorithm. Czas. Tech. 2017, 12, 35–46. [Google Scholar]
- Mirzendehdel, A.M.; Behandish, M. Co-design Optimization of Moving Parts for Compliance and Collision Avoidance. Comput. Aided Des. 2023, 163, 103547. [Google Scholar] [CrossRef]
- Menges, A.; Ahlquist, S. Computational Design Thinking; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Beorkrem, C. Material Strategies in Digital Fabrication; Routledge: Abingdon-on-Thames, UK, 2017. [Google Scholar]
- Zboinska, M.A.; Cudzik, J.; Juchnevic, R.; Radziszewski, K. A design framework and a digital toolset supporting the early-stage explorations of responsive kinetic building skin concepts. Smart Responsive Des. 2015, 2, 715–725. [Google Scholar]
- Soleimani, A. Computational Design Thinking and Thinking Design Computing. In Proceedings of the Reynolds Symposium: Education by Design, Portland, OR, USA, 18–19 October 2019. [Google Scholar]
- Lawson, B. How Designers Think: The Design Process Demystified; Routledge: Abingdon-on-Thames, UK, 2017. [Google Scholar]
- Oxman, R. Thinking difference: Theories and models of parametric design thinking. Des. Stud. 2017, 52, 4–39. [Google Scholar] [CrossRef]
- Gu, N.; Yu, R.; Behbahani, P.A. Parametric design: Theoretical development and algorithmic foundation for design generation in architecture. In Handbook of the Mathematics of the Arts and Sciences; Springer: Cham, Switzerland, 2021; pp. 1361–1383. [Google Scholar]
- Verroust, A.; Schonek, F.; Roller, D. Rule-oriented method for parameterized computer-aided design. Comput. Aided Des. 1992, 24, 531–540. [Google Scholar] [CrossRef][Green Version]
- Holzer, D.; Hough, R.; Burry, M. Parametric design and structural optimisation for early design exploration. Int. J. Archit. Comput. 2007, 5, 625–643. [Google Scholar] [CrossRef]
- Herzog, V.; Suwelack, S. Bridging the Gap between Geometry and User Intent: Retrieval of CAD Models via Regions of Interest. Comput. Aided Des. 2023, 163, 103573. [Google Scholar] [CrossRef]
- Carpo, M. The Alphabet and The Algorithm; Mit Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Schumacher, P. Parametricism: A new global style for architecture and urban design. Archit. Des. 2009, 79, 14–23. [Google Scholar] [CrossRef]
- Frazer, J. An Evolutionary Architecture; Architectural Association Publications: London, UK, 1995. [Google Scholar]
- Frazer, J. Parametric computation: History and future. Archit. Des. 2016, 86, 18–23. [Google Scholar] [CrossRef]
- Hensel, M.; Menges, A.; Weinstock, M. Towards self-organisational and multiple-performance capacity in architecture. Archit. Des. 2006, 76, 5–11. [Google Scholar] [CrossRef]
- Holland, J. Adaptation in Natural and Artificial Systems; The University of Michigan: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Godlberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley Longman Publishing, Co., Inc.: Boston, MA, USA, 1989. [Google Scholar]
- Monedero, J. Parametric design: A review and some expiriences. Autom. Constr. 2000, 9, 369–377. [Google Scholar] [CrossRef]
- Shea, K.; Aish, R.; Gourtovaia, M. Towards integrated performance-based generative design tools. Digit. Des. eCAADe 2003, 21, 253–264. [Google Scholar]
- Kolarevic, B. Back to the future: Performative architecture. Int. J. Archit. Comput. 2004, 2, 43–50. [Google Scholar] [CrossRef]
- Dall’Ara, E.; Torreggiani, D.; Tassinari, P. Landscape and infrastructures: Design issues for the integration of parking areas in non-urban contexts. Landsc. Res. 2013, 38, 668–682. [Google Scholar] [CrossRef]
- Löfgren, S. Knowing the landscape: A theoretical discussion on the challenges in forming knowledge about landscapes. Landsc. Res. 2020, 45, 921–933. [Google Scholar] [CrossRef]
- van den Brink, M.; van den Brink, A.; Bruns, D. Boundary thinking in landscape architecture and boundary-spanning roles of landscape architects. Landsc. Res. 2022, 47, 1087–1099. [Google Scholar] [CrossRef]
- Yoffe, H.; Plaut, P.; Grobman, Y.J. Towards sustainability evaluation of urban landscapes using big data: A case study of Israel’s architecture, engineering and construction industry. Landsc. Res. 2022, 47, 49–67. [Google Scholar] [CrossRef]
- Dong, Q.; Lu, H.; Luo, X.; He, P.; Li, D.; Wu, L.; Chen, X. Evaluation and Optimization of Green Space Fairness in Urban Built-Up Areas Based on an Improved Supply and Demand Model: A Case Study of Chengdu, China. Sustainability 2023, 15, 15014. [Google Scholar] [CrossRef]
- Cantrell, B.; Mekies, A. Codify: Parametric and Computational Design in Landscape Architecture; Routledge: Abingdon-on-Thames, UK, 2018. [Google Scholar]
- Aish, R.; Woodbury, R. Multi-level interaction in parametric design. In International Symposium on Smart Graphics; Springer: Berlin/Heidelberg, Germany, 2005; pp. 151–162. [Google Scholar]
- Schumacher, P. Design parameters to parametric design. In The Routledge Companion for Architecture Design and Practice: Established and Emerging Trends; Routledge: New York, NY, USA, 2015; pp. 3–20. [Google Scholar]
- Schumacher, P. Formalism and Formal Research. In International Review of Architecture and Building Engineering–Rivista Internazionale di Architettura e di Ingegneria delle Costruzioni; ARKETIPO: London, UK, 2016; p. 104. [Google Scholar]
- Watanabe, M.S. Induction Design: A Method for Evolutionary Design; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).