1. Introduction
Currently, the Internet of Things brings systems that are increasingly interconnected and consequently more complex, raising concerns about energy consumption and the sustainability of IoT networks. This complexity is evident across various domains such as smart cities, logistics, healthcare, communications, and manufacturing. In manufacturing specifically, IoT can empower conventional products with augmented functionalities related to location management, state monitoring, or even decision-making capabilities. These products, equipped with RFID or wireless sensor networks (WSNs), then transform into what we refer to as “Intelligent Products”. These new functionalities can only be sustainably guaranteed if an accurate and dynamic control of energy is ensured. Accordingly, this study deals with the optimization of energy consumption and formalizes the SADHoA-WSN framework, aiming to tackle the reconfiguration process in WSNs.
1.1. Intelligent Products and Communicating Materials
Many different definitions of “Intelligent Products” are available in the literature, and numerous works are reported. Some frameworks are proposed to classify them. As an example, Ref. [
1] presents a three-dimensional classification model, whose dimensions are related to the level of intelligence, the location of intelligence, and the aggregation level of intelligence of the product. The level of intelligence refers to the decision-making capabilities of the product. The location of the intelligence indicates the place where the decision algorithms are executed. The last one, the aggregation of intelligence, distinguishes products capable of managing not only themselves but their components as well.
Communicating materials are raw materials where IoT devices are spread [
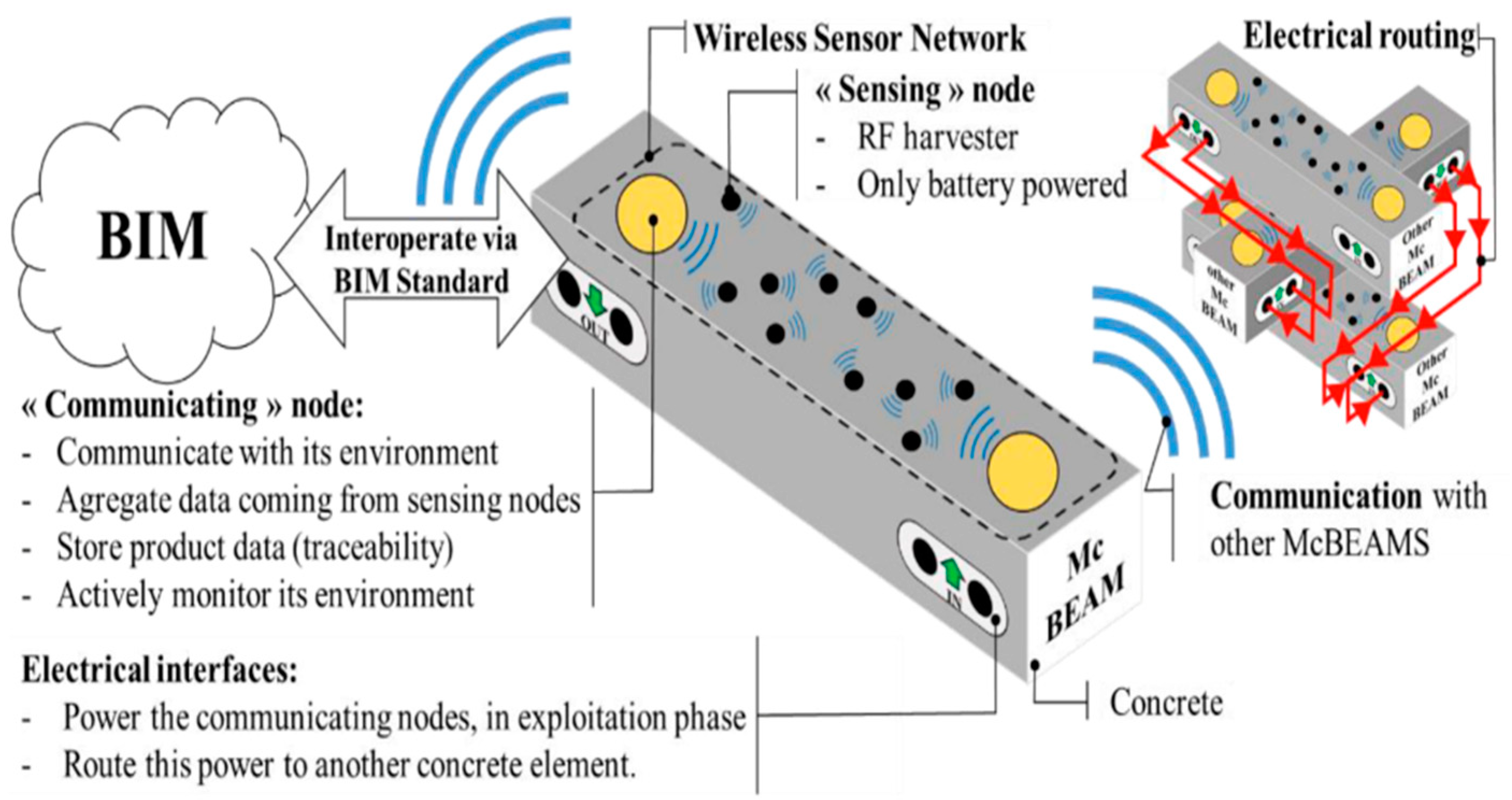
2]. As a subclass of Intelligent Products, they can also exhibit smart features and they keep these smart functions, even when undergoing physical transformations such as milling, cutting, or sawing. Diverse early prototypes were designed for the manufacturing and the construction industry, by using micro-electronics devices into a material. The material could be either wood, textile, or concrete and the inserted devices could be either RFID tags or self-powered wireless sensor networks (WSNs) embedded into the material. In the framework of the French ANR McBIM project [
2], a prototype of a communicating concrete has been proposed and presented in
Figure 1. This last architecture is the one considered in this paper.
This communicating concrete is in fact a normal concrete beam in which wireless sensor nodes are inserted, all forming a global wireless sensor network (WSN). This network is then used to endow the concrete with additional sensing capabilities, e.g., for applications in Structural Health Monitoring. It is composed of two types of nodes, communicating nodes (CN) and sensing nodes (SN), whose roles are described in
Figure 1.
1.2. Energy-Autonomous Intelligent Products
Awarding smart functionalities to a product requires energy, given either by external devices (e.g., RFID readers) or by internal devices (e.g., batteries inside the product). But, in any case, energy is always more or less required, and its consumption must always be monitored and controlled. This paper addresses energy-autonomous Intelligent Products (or communicating materials), i.e., products embedding their own power sources. While conveying its own power source gives the product more “freedom”, it also restricts its lifetime leading to restrictions on the use of energy-autonomous Intelligent Products. This issue, and the related possible solutions, also depend on the type of Intelligent Product considered.
1.3. The Lifetime Problem
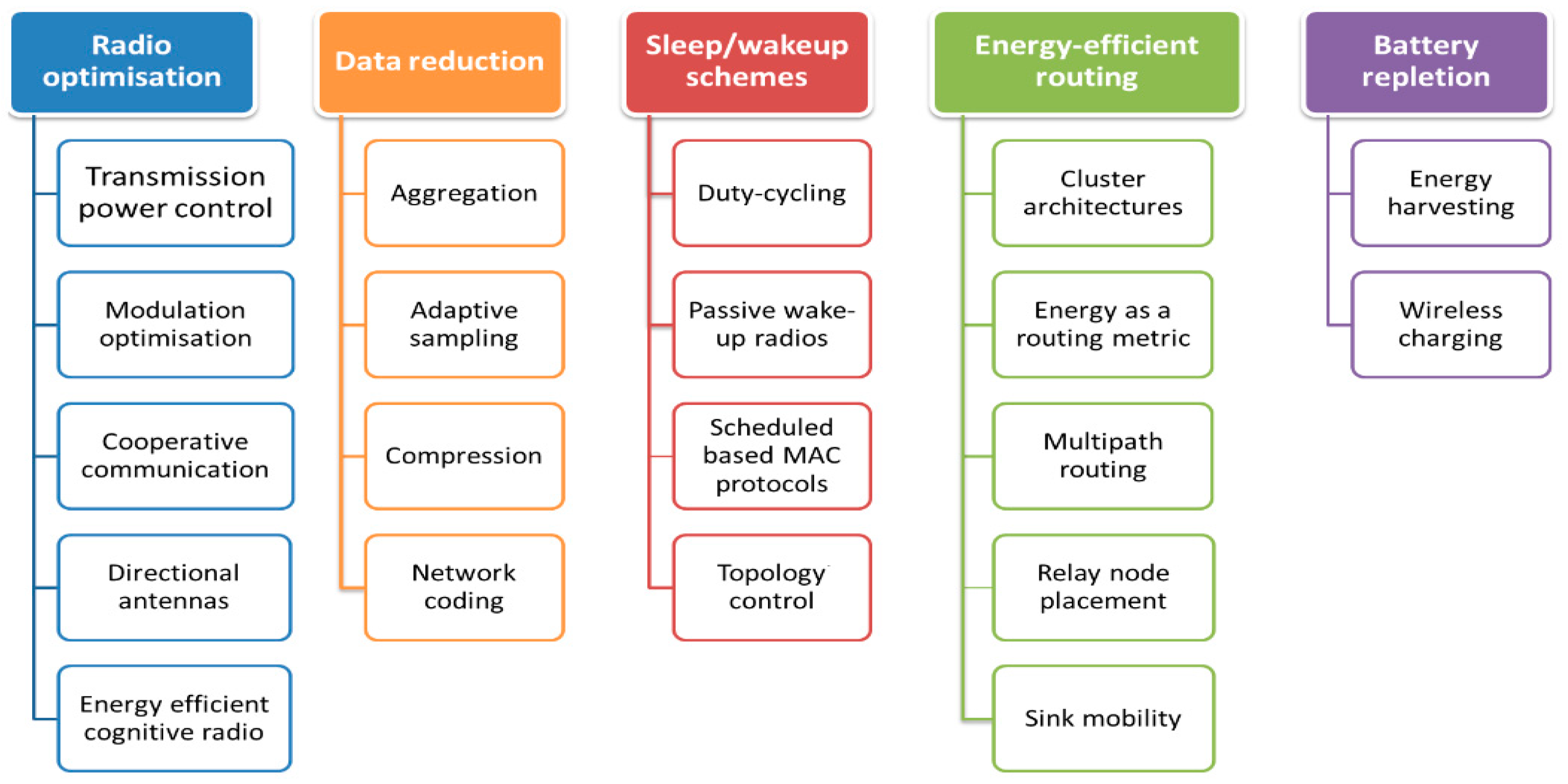
In the case of WSN-equipped communicating materials, to keep these functionalities as long as possible, one must pay attention to the inner network lifetime. This problem is a well-known issue in the network domain, and many authors tried to address it via different strategies, all leading to an energy-efficient WSN, as listed in
Figure 2.
Since lifetime is inversely proportional to energy consumption, a classic strategy is to reduce energy consumption while guaranteeing the network quality of service. For example, sustainability is discussed and frameworks are exposed for the following specific applications: in environmental monitoring [
4], in smart city control [
5], or in civil infrastructure construction and maintenance [
6]. As depicted in
Figure 2, some mechanisms are directly linked to the node hardware optimization like directional antennas or energy harvesting implementation (radio optimization or battery repletion) [
7]. Others are linked to the communication protocols used in the network (sleep/wake-up schemes [
8], energy-efficient routing [
9,
10]) or to the data reduction techniques (aggregation, compression, etc.) used to gather information. Protocol techniques could be grouped into the “software” solutions, as opposed to the first one, which is more related to the “hardware” on the wireless nodes. Since software techniques are designed to optimize communications between nodes in the wireless network, and since the communicating material’s lifetime is directly linked to the lifetime of each of them, the rest of this article is focused on this type of technique.
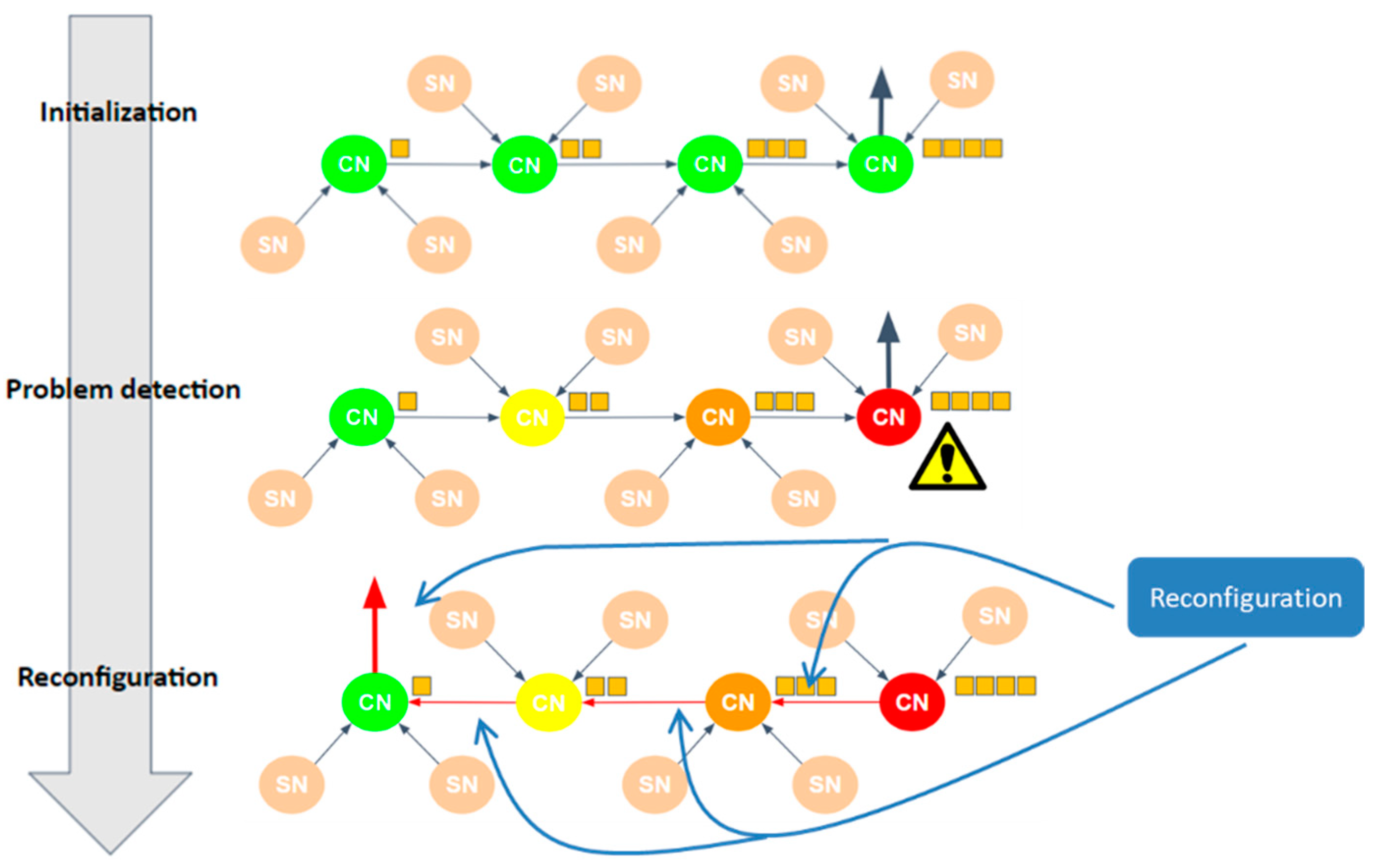
Dynamically, through time, it may be necessary to reconfigure the wireless sensor network, in terms of routing, in various cases of disturbances from the network control system (e.g., changes in data collection requirements, network congestion, low node energy levels, or node failure) [
9]. Our illustrative example is the following: suppose a communicating concrete be composed of four CNs, each linked to two SNs, its initial routing structure corresponding to the “initialization” phase in
Figure 3, where data, represented by orange squares, are transmitted, and collected from left to right. The last CN (called a sink) then transmits all these data to the cloud. During this phase, each node’s energy consumption is directly related to the amount of data it receives or sends. The closer the node is to the sink, the more data it handles and so the more energy it consumes, resulting in uneven energy levels. When this energy level reaches a certain threshold, a problem is then detected (“problem detection” phase in
Figure 3) and a reconfiguration must be applied, modifying the initial routing of the embedded WSN (“reconfiguration” phase in
Figure 3).
A change in the operation (or a reconfiguration) of the network can be decided if a long-term energy imbalance is observed or if heterogeneous consumption among the wireless sensor nodes reveals a particular weakness, potentially leading to network failures. To decide whether a reconfiguration is needed, two good criteria can be considered, as follows: the first one is
, the mean of all energy consumptions of each node
Ni, with
i evolving from 1 to
N being the total number of nodes in the network. This criterion gives an insight into the average node consumption. A second criterion is
, the standard deviation of the energy consumption of each node
Ni, which gives information about the repartition of energy consumption in the network. Indeed, some nodes could consume a lot more energy than others. Multiplying these two terms ensures that both are optimized together. This optimization can be expressed via the following objective Function (1):
Ways or techniques to achieve this objective can be observed in
Figure 2. After the implementation of an energy-efficient protocol based on duty-cycling (for minimizing) and aggregation technique (for uniformizing), we use in our work structural network levers such as energy-efficient routing or topology control to manage energy all along the lifetime of a communication material, which is why we are interested in the control architectures proposed in the literature going forward. The rest of this paper is organized as follows: the
Section 2 is dedicated to a state of the art of the different control architectures for WSN existing in the literature, the
Section 3 details our specific architecture, SADHoA-WSN, and
Section 4 presents the current state of our experimentations with this framework.
2. Control Architectures for WSN: A State of the Art
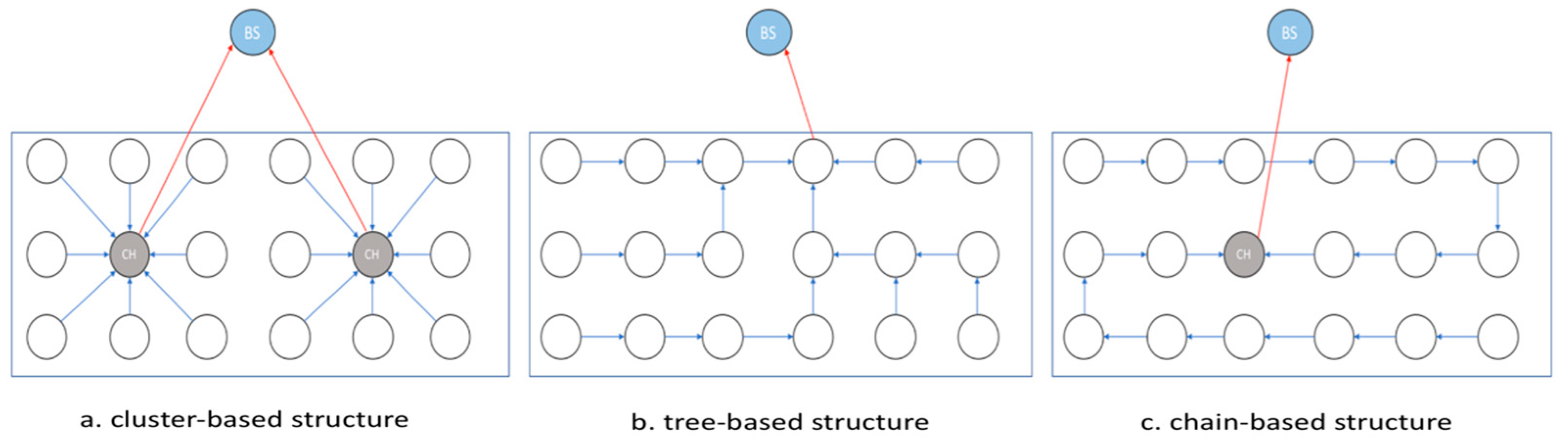
WSNs are characterized by resource constraints, dynamic environments, and the need for efficient data collection and dissemination. The key challenge lies in determining the most appropriate network topology to ensure optimal network performance and energy use. Examples of simple topologies from the same distribution are given in
Figure 4.
Different roles and decisional powers can be given to each node, which most of the time depend on their position in the topology. In this section, we examine the various control techniques suitable for both traditional WSNs in
Section 2.1, software-defined wireless sensor networks (SDWSN) in
Section 2.2, and hybrid solutions mainly coming from manufacturing are exposed in
Section 2.3. Then, an analysis of all the control architectures is performed in
Section 2.4 to position the proposal.
2.1. Historical Control Techniques in WSNs
Traditional control techniques are mainly based on predefined solutions to reduce or balance the energy during the use of the WSN (workload balancing, role rotation, node sleeping, etc.). Nodes can take reconfiguration decisions with local interactions (1 to few hops exchanges). This kind of approach often leads to local optima solutions.
Several works have been carried out to develop efficient control methods in WSN, each contributing to improved resource management and network efficiency. One pioneering example is the Low-energy Adaptive Clustering Hierarchy (LEACH [
11]), a protocol that introduces periodic rotation of cluster heads (CHs). At each defined period, all nodes in the network participate autonomously in the election of CH. Each node chooses a random value according to a probabilistic distribution. The node with the highest value in each cluster is elected as the CH. A prolongation of this idea funded on a game theoretic approach to optimize and balance energy consumption is proposed in [
9].
In [
12], a local topology reconfiguration mechanism is proposed for energy balancing. This mechanism is activated after a node has transmitted data. The node then evaluates the strength of the next node. If this strength is less than the average strength of all the sensors, a reconfiguration is initiated, first removing the link to the low-strength node and then seeking to establish new connections with higher-strength nodes in the vicinity.
The authors in [
13] propose a content-based adaptive and dynamic scheduling scheme for WSN. This scheme, centered on the use of an analysis module located at the base station (BS), enables the content of received data packets to be processed and informed decisions to be made about the state management of network nodes. Based on the data analysis, the BS sends control messages to the sensor nodes, guiding them to change their state between different modes such as active, standby, and sleep.
In [
14], a new routing algorithm for WSN using a virtual ring infrastructure with a mobile sink is proposed. When a node in a ring detects the proximity of the sink, it informs the other nodes in the ring. These nodes then transmit their data to the sink via the nearest node. In addition, the network dynamically adjusts its routing according to the position of the sink. When the sink changes position, the nodes reconfigure their routing behavior, thus maintaining the network’s efficiency in terms of energy consumption.
2.2. Control Techniques in SDWSN Context
Using centralized software leads to a global view of the network and thus global optimization. Software-defined networking (SDN) represents a promising paradigm for network management, characterized by the separation of control and data transmission functions. This separation facilitates centralized decision-making and flexible network management. This approach is particularly well suited to WSN, where research proposals have been implemented as SDWSNs [
15]. Several studies have been carried out in this field, exploiting new architecture in a variety of ways. Various software solutions implementing the concept of Network Digital Twin are proposed to control [
16,
17] or to monitor the energy [
18] of the SDWSN.
In [
19], Wang et al. present an algorithm for optimizing energy management in WSNs. This algorithm divides the time interval of each sensor into two distinct periods: one for beacon transmission and the other for execution. During the beacon period, the sensors remain active to send beacon data to the central controller. Based on this information, the controller adjusts the sleep state of the nodes, updates the network topology, and then transmits directives to the relevant nodes. During the execution period, the nodes follow these directives, choosing whether to remain active to send the main data or to go into sleep mode.
Similarly, Hajian et al. [
20] introduce a network management method designed for load balancing. This method is activated when a node’s energy drops below a certain threshold, or when its congestion becomes excessive. At this point, the affected node communicates directly with the central controller (SDN controller), which plays a crucial role in processing reconfiguration requests. It analyzes the current state of the network and develops new routing configurations tailored to the specific needs of the affected nodes.
In addition, Refs. [
18,
21] propose methods for centralized prediction of energy consumption in SDWSN. These approaches use a mathematical model based on Markov chains to estimate the energy consumption of sensor nodes. Using this model, the SDN controller can predict the energy consumption of the nodes and detect if a network reconfiguration is needed.
2.3. Towards Hybrid Control Architectures
Control architectures have been applied across various domains and extensively developed within the manufacturing sector, where the adaptability of control systems is crucial for responding to environmental shifts. These architectures delve into the amalgamation of distributed and centralized organizational structures, employing diverse decision-making frameworks. Grounded in a holonic model, these architectures designate individual units as “holons” [
22]. Holons sharing common interests or features can aggregate into higher-level holons, while those with a common parent can engage in communication. Predominantly rooted in the holonic paradigm, manufacturing control architectures are commonly known as Holonic Control Architectures (HCA). Additionally, they are recognized as heterarchic architectures, as they amalgamate both distributed and centralized (or hierarchical) elements. Such architectures are frequently deployed using multi-agent systems.
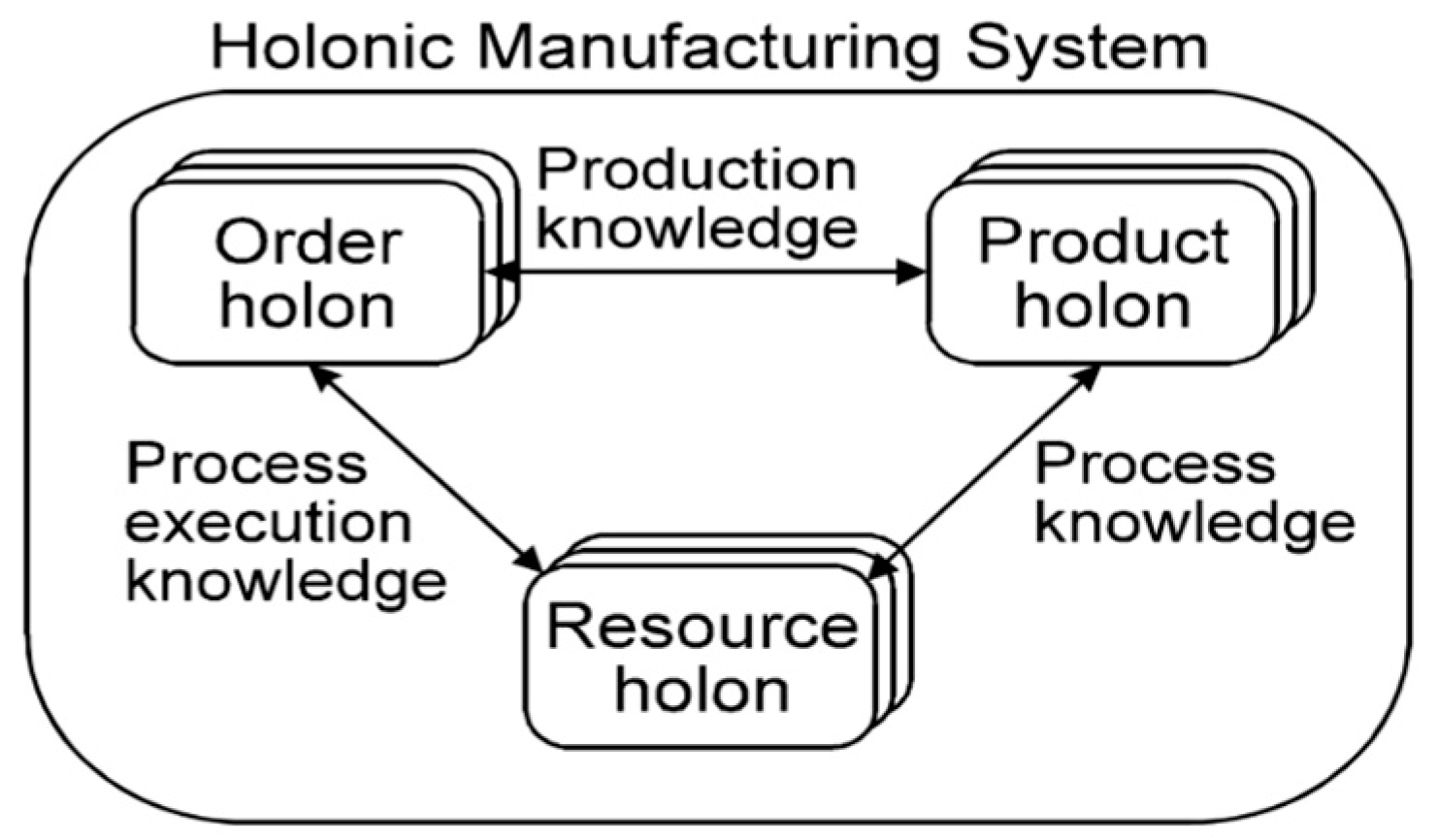
One of the pioneering HCAs, PROSA (product-resource-order-staff), was introduced by Van Brussel [
23]. This framework comprises three fundamental holon types: order holons, product holons, and resource holons, as depicted in
Figure 5. The authors also introduced staff holons, which can be incorporated to support basic holons in their tasks. Collaboration among holons enables the fulfillment of adaptation and flexibility requirements.
Holons are structured using object-oriented concepts, linking a physical entity with an informational one. The resource holon comprises a physical component, which is the production resource, and an informational component that governs the resource. The product holon houses both process and product knowledge, while the order holon assigns tasks to other holons to ensure production. Within this architecture, each holon can be broken down into sub-holons. The staff holon provides an overview of all resources and orders, generating schedules as guidance for the order and resource holons. Other holons may follow this guidance in the absence of disturbances. However, when disruptions or changes arise, the basic holons may disregard the advice from the staff holon and make autonomous decisions.
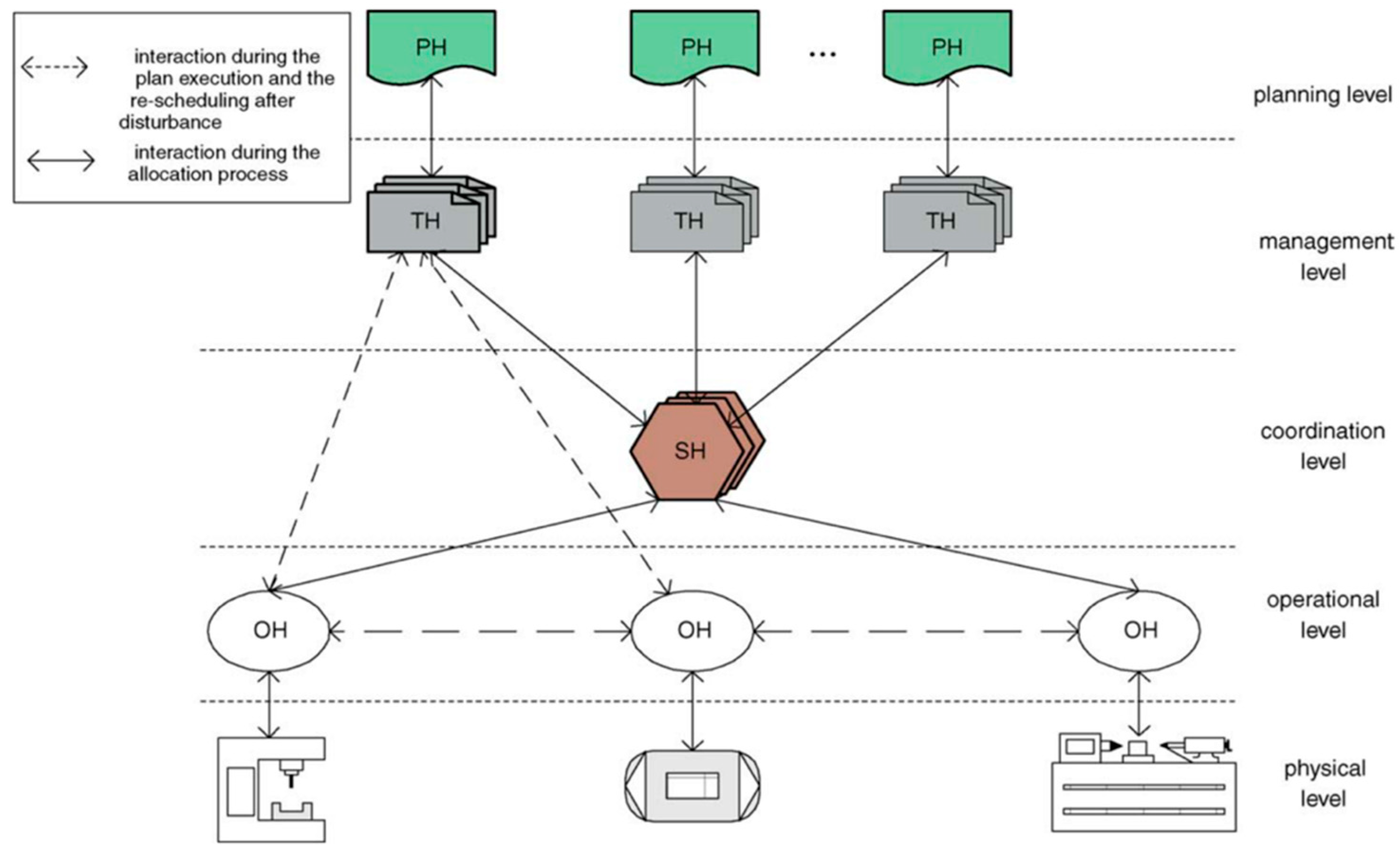
ADACOR (Adaptive Holonic Control Architecture) is a bio-inspired holonic architecture introduced by [
24]. It employs a pheromone-like propagation mechanism to disseminate information during disturbances. In this architecture, four holons are defined, as follows: product holon, task holon, operational holon, and supervisor holon. These holons are organized within a decentralized control architecture to adapt to environmental changes (see
Figure 6).
In this architecture, holons are arranged in a hierarchical structure comprising four levels, as follows: planning, coordination, and operational levels. Supervisor holons propose optimized execution plans to task holons and oversee the execution of operational holons. When disturbances occur, operational holons communicate the need for reorganization through the supervisor holon. Adjacent operational holons detect the pheromone signal and restructure themselves into a heterarchical arrangement. Subsequently, holons can directly interact with task holons to devise an alternative schedule plan that minimizes the impact of unexpected disturbances.
Holonic Manufacturing Systems take a step further by introducing dynamic HCAs, where the architecture can dynamically adjust to environmental changes. In such cases, the entire decision tree structure may undergo modification. Various dynamic architectures have been proposed in the literature, with the latest being POLLUX [
25], which is discussed later. POLLUX incorporates an adaptation mechanism for the architecture, utilizing governance parameters to either expand or constrain the behavior of low-level holons in response to disturbances observed at higher levels.
2.4. Synthesis and Research Issues
The control techniques in WSN exposed in this literature review enable us to identify four distinct types of network architecture (A, B, C, and D), as shown in
Figure 7. This classification is based on the location of the monitoring or observation level (green circles), the position of the control or decision-making level (red circles), and the direction of transfer of control (red arrow) and observation (green arrow) packets. Architectures A and B are distributed in nature, as follows: in architecture A [
12], each node monitors and reconfigures its parameters independently, without interacting with other nodes, while architecture B [
14] is based on collective monitoring and decision-making, with each node assessing its own energy state as well as that of its neighbors. On the other hand, architectures C and D are centralized, as follows: architecture C [
19,
20] operates with a system in which nodes monitor the entire network and send their data to a higher-level node, responsible for decision-making, while architecture D [
13,
21] centralizes both monitoring and decision-making in a single control point.
Distributed control architecture involves distributing control and management functions across several nodes. This approach offers great adaptability to local changes and reduces communication costs. However, it can present challenges in terms of overall coordination, particularly in applications requiring synchronized actions or a centralized view of the network. In contrast, centralized control architecture relies on a central management entity making all decisions for the entire network. It simplifies overall management and coordination, providing a consistent overview and synchronized actions. However, it is more vulnerable to failures of the central control point, so it may be less adaptable to changes and cause load imbalances between nodes. The fundamental challenge lies in designing hybrid architecture control that balances the advantages of distributed and centralized approaches. This architecture combines local decision-making with centralized global optimization. Each node makes decisions based on its immediate conditions, enabling rapid, relevant reactions to local situations. At the same time, central management analyzes the entire network for global optimization, balancing the load and making efficient use of resources. This combination ensures high performance, with local flexibility and global efficiency, making the network resilient and adaptable to change. As a result, hybrid architectures are the key to better eco-efficient networks and able to reduce energy consumption.
The objective of this research work is thus to propose a WSN-adapted HCA, based on POLLUX, the latest published to our knowledge. This architecture should allow us to test different levels of hybridization, from the fully hierarchical to the distributed ones, to compare their respective performances. To embrace the SDWSN paradigm, control and data transmission functions must be separated, and the HCA may be located remotely, which imposes to specify the coordination mechanism between the control and the data plane, i.e., in our case, the HCA situated remotely and the different physical wireless nodes). For the development of this architecture, a model-based engineering approach will be used to obtain formalized UML models.
3. SADHoA-WSN
In this section, the WSN-adapted dynamic HCA is provided. It is referred to as SADHoA-WSN, for Switching-agnostic Dynamic Holonic Architecture for WSN. This framework is the evolution of former SOHOMA works [
26] adapted for the reconfiguration of wireless sensor networks. Its principles are described in
Section 3.1. Since SADHoA-WSN reuses some of the POLLUX concepts,
Section 3.2 briefly presents it. Then, the different models of SADHoaA-WSN are described, namely the static structure of the HCA (
Section 3.3).
3.1. Global Process of SADHoA-WSN
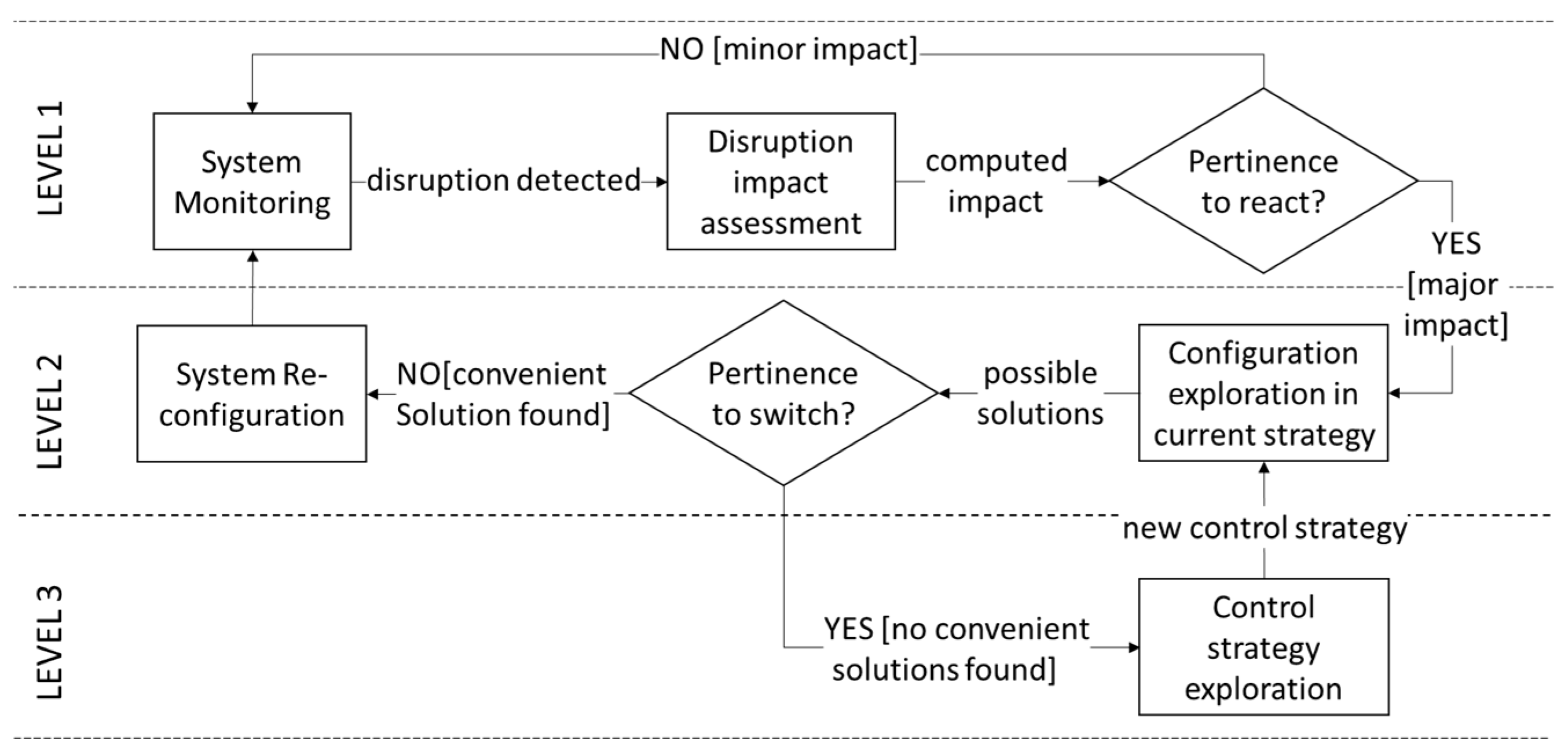
SADHoA-WSN is a dynamic Holonic Control Architecture. It thus follows a three-level process described in
Figure 8. The first level is dedicated to system monitoring and anomaly detection. SADHoA-WSN aims to identify disruptions and calculate their potential impact to assess whether a response is required. If it is needed, SADHoA-WSN then passes in level 2, where the different alternative configurations of the WSN are explored, to obtain a set of possible solutions. If one of these solutions mitigates the perturbation, the control system then uses it to update the network routing structure. Without any good solution, SADHoA-WSN passes in level 3, where alternative control strategies are explored. Here, a control strategy is a different version of the control architecture (centralized, distributed, hybrid). Once a new control strategy is set, the configuration exploration restarts and other possible solutions are generated and evaluated.
3.2. Description of the POLLUX Architecture
SADHoA-WSN is “switching-agnostic”. By “switching-agnostic”, we refer here to a dynamic HCA able to implement different (but compatible) solutions in the different steps of the general dynamic HCA behavior, as presented previously. Indeed, the architecture should support the different possible proposals provided by the literature made to (1) detect/evaluate the disruption and (2) switch between different control strategies. As argued by its authors, the POLLUX architecture has been designed to face these limitations by providing a generic definition of dynamic HCAs [
25]. The POLLUX architecture is an assembly of
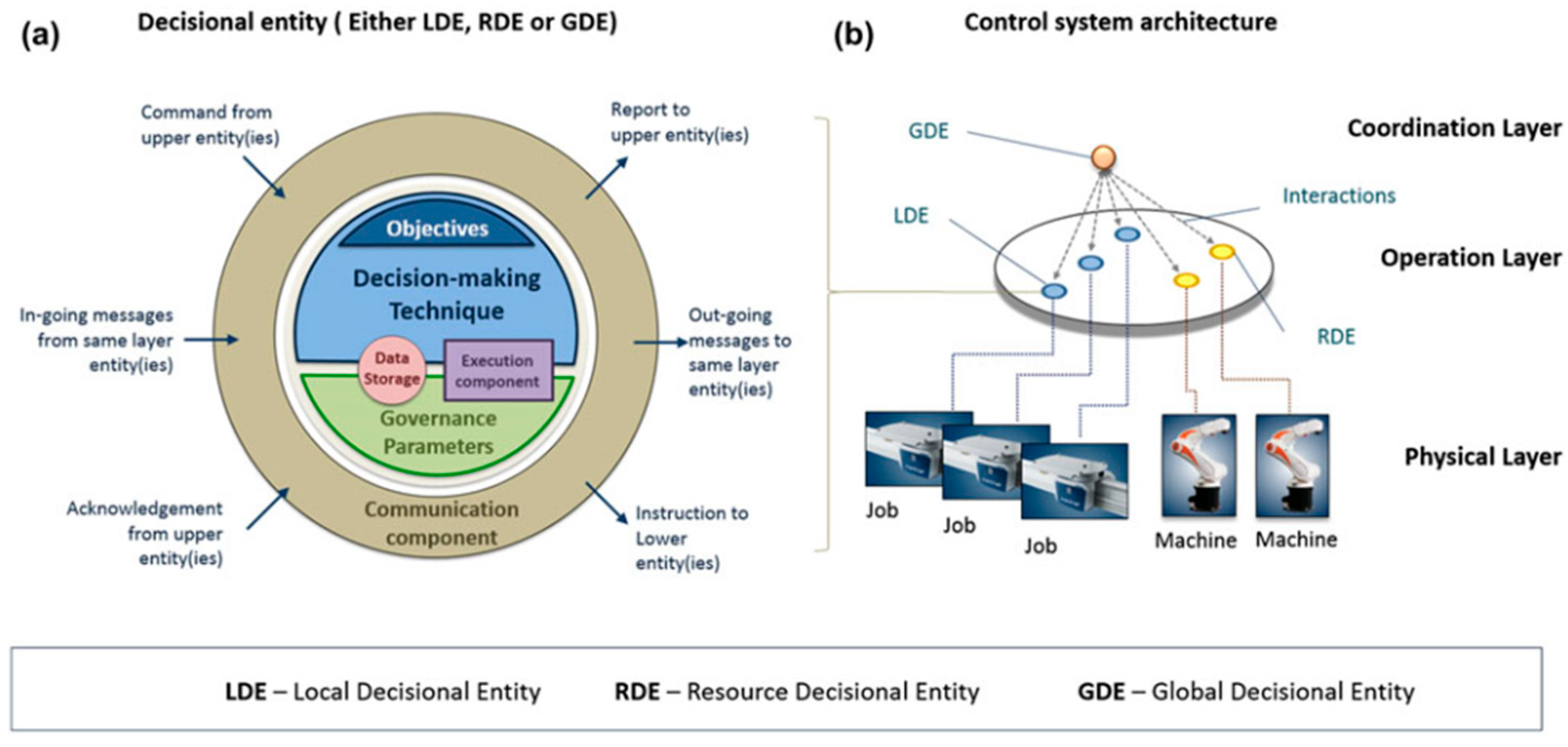
Decisional Entities, i.e., virtual units, with their own behaviors. Each decisional entity (
Figure 9a) contains its objectives, a decision-making technique, data storage, and communication and execution components. Three layers compose the control architecture: the coordination layer, operation layer, and physical layer (
Figure 9b). Three main types of decisional entities are used, as follows: Local Decisional Entities (LDE), Resource Decisional Entities (RDE), and Global Decisional Entities (GDE). LDEs are responsible for scheduling and guiding jobs in the physical layer, RDEs control the resources in the physical layer and GDEs are responsible for the offline scheduling and respect of the global objectives. These Decisional Entities interact within and between layers, constituting the whole control system architecture.
Another interesting and unique characteristic of the POLLUX architecture is the governance parameters. In POLLUX, each GDE can control the degree of autonomy of its respective LDEs or RDEs by using an explicit set of parameters defining the attributes and autonomy. These governance parameters allow each GDE to specify its role with respect to the LDEs/RDEs it manages. The possible values of this role might be
coercive (C),
limitary (L), or
permissive (P). A coercive role corresponds to a direct command of actions to be performed by subaltern entities. A limitary role concerns the case when the GDE proposes a set of solutions. A permissive role is when the GDE grants full decisional autonomy to its subaltern entities (
Figure 9a).
The next section introduces SADHoA-WSN with two different kinds of models. The first one, static modeling, details the different entities of the architecture, inspired by POLLUX concepts and by our application domain. The second one, dynamic modeling, defines the interactions between the different elements of SADHoA-WSN.
3.3. SADHoA-WSN Structure
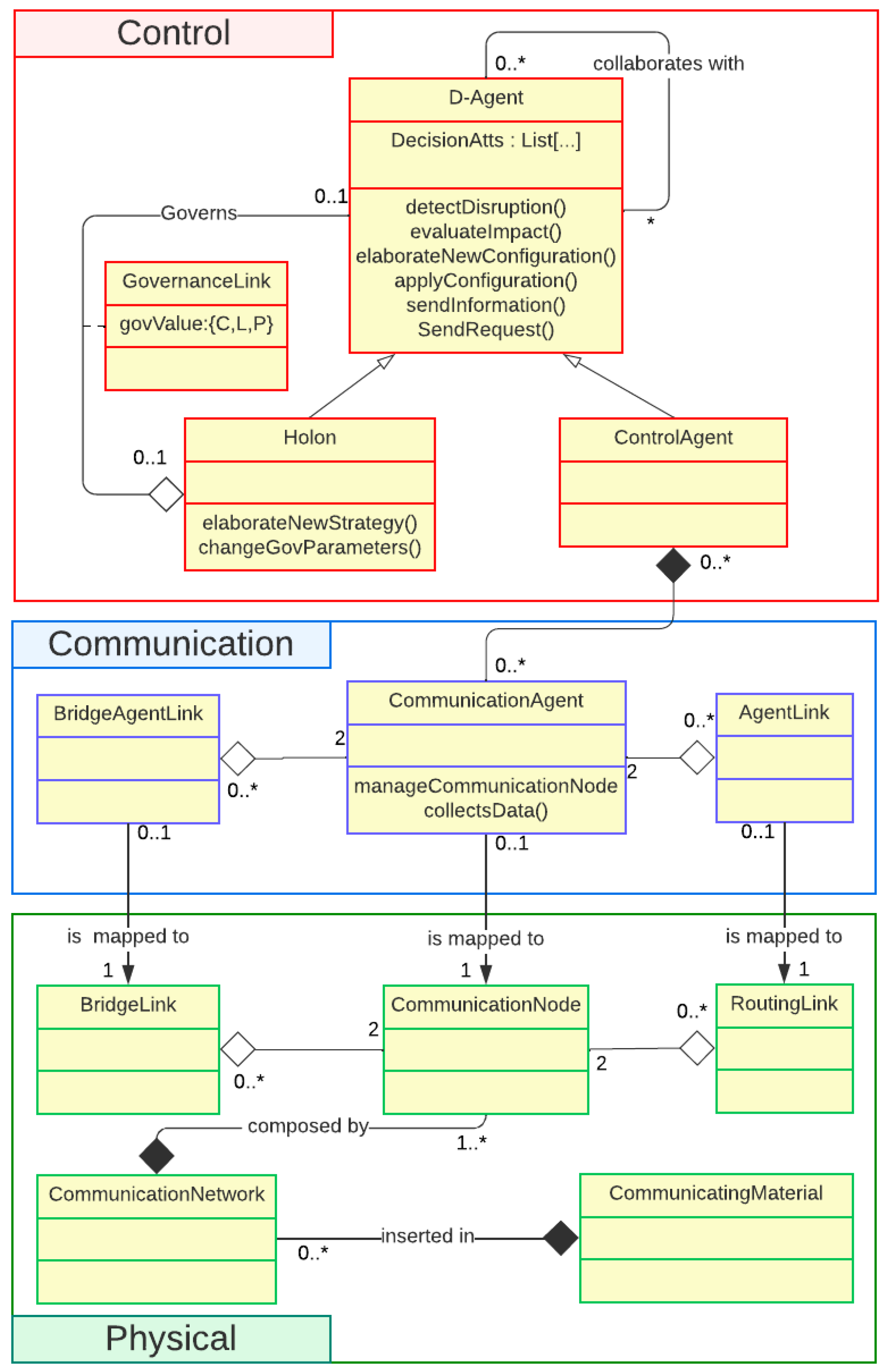
SADHoA-WSN adopts the SDN paradigm by separating the control and the data plane. As shown in
Figure 10, its static structure is thus divided into three different levels: physical, communication, and control. The physical layer gathers the elements of the wireless sensor network, as follows:
The CommunicationNode represents the physical node, inserted into the communicating material while the CommunicationNetwork represents the whole WSN, fully embedded into a CommunicatingMaterial, i.e., the material equipped with it.
The RoutingLink is the set of active routes used to send data all over the communicating network, whereas the BridgeLink is the set of possible routes that may be used.
The Communication Layer is a layer that realizes communication with the physical layer. It then acts as an interface between the physical and the control layers to (1) gather all the needed information for the control, and (2) reduce the impact of SADHoA elements in case of changes in the physical layer impacting the cyberphysical data exchange. This layer can be considered as a digital twin of the underlying communication network, composed of the following entities:
The CommunicationAgent is an agent making the interface between the CommunicatingNode and its ControlAgent. It can manage the physical node (for the update process) and collect the needed data from the node and for the control architecture.
The BridgeAgentLink and the AgentLink are entities representing the real RoutingLink and BridgeLink.
Finally, the control layer regroups all the entities needed to control the physical communication network, as follows:
The
D-Agent is a decision agent, taking part in the reconfiguration process. It has different functions required to support the reconfiguration process depicted in
Figure 8. The
D-Agent has two subtypes, the
ControlAgent and the
Holon. The first one is an elementary
D-Agent, directly linked to one or several
CommunicationNodes. The second one acts as a supervisor and can be seen as the equivalent of a GDE in Pollux Architecture. It manages a set of
D-Agents by setting different governance parameters for each of them. Moreover, it also has the capability to elaborate new control strategies.
4. Implementation, Simulation, and Real Tests
4.1. Description of the Implementation Environment
To implement different control strategies for communicating material with the SADHoa-WSN framework, we developed an instrumented and controlled WSN data collection platform which can be divided into three parts:
The average power of a node in an active state is around 600 mW, and 320 mW in a sleep state where the power of Arduino alone (without the XBee shield) is 275 mW. Therefore, the power of the XBee module with its shield in active/sleep mode is 325 mW and 45 mW, respectively. In addition, the computing ability of nodes could also be used to reduce the data transfer and thus the time for a radio to stay active.
4.2. Predicting and Analyzing Energy Consumption
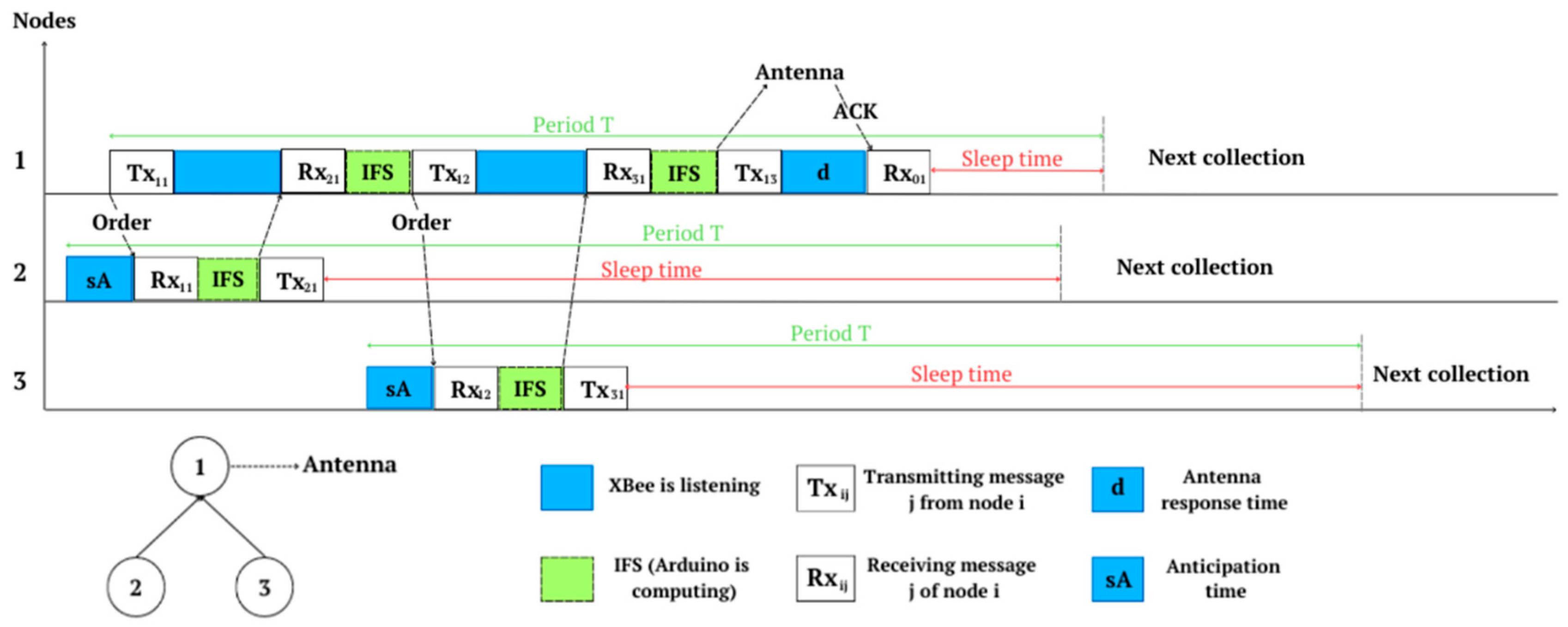
First energy consumption models were proposed in [
2]. In this approach, the models are based on estimating the time spent by each node in active and sleep modes. To illustrate the elaboration of this kind of model, an example of a chronogram for three nodes is depicted in
Figure 12.
An analytical model of the activity duration
Di of node
i is expressed hereafter. This parameter
Di defines the time when the radio interface of a node is active during a collection cycle (with a sender–receiver synchronization mechanism):
In this formula, a represents the time for receiving/sending a collection order or acknowledgment about successful receipt; IFS (or Inter-frame Space) is the waiting period between transmissions, which is used to prevent collisions with other frames and which can be adapted for each technology; C is the number of children of the node i; sA is the synchronization anticipation time, which is used to wake up intermediate and external nodes earlier so that they can receive a signal from the parent; and DTx(i) is the amount of time it takes for a message to be sent from node i to its parent.
With the communication activity duration of each node during a collection cycle, respective energy consumption can be deducted. Power consumption in active (
) and sleep (
) modes (see
Section 4.1) is used to determine the energy consumption of each node during a collection period
T, as follows:
To illustrate the SADHoA-WSN process (cf.
Section 3.1), some advancements and results of the functionalities described in level 1 of
Figure 8, especially for the following functions of the control system: “System Monitoring” and “Disruption impact assessment”.
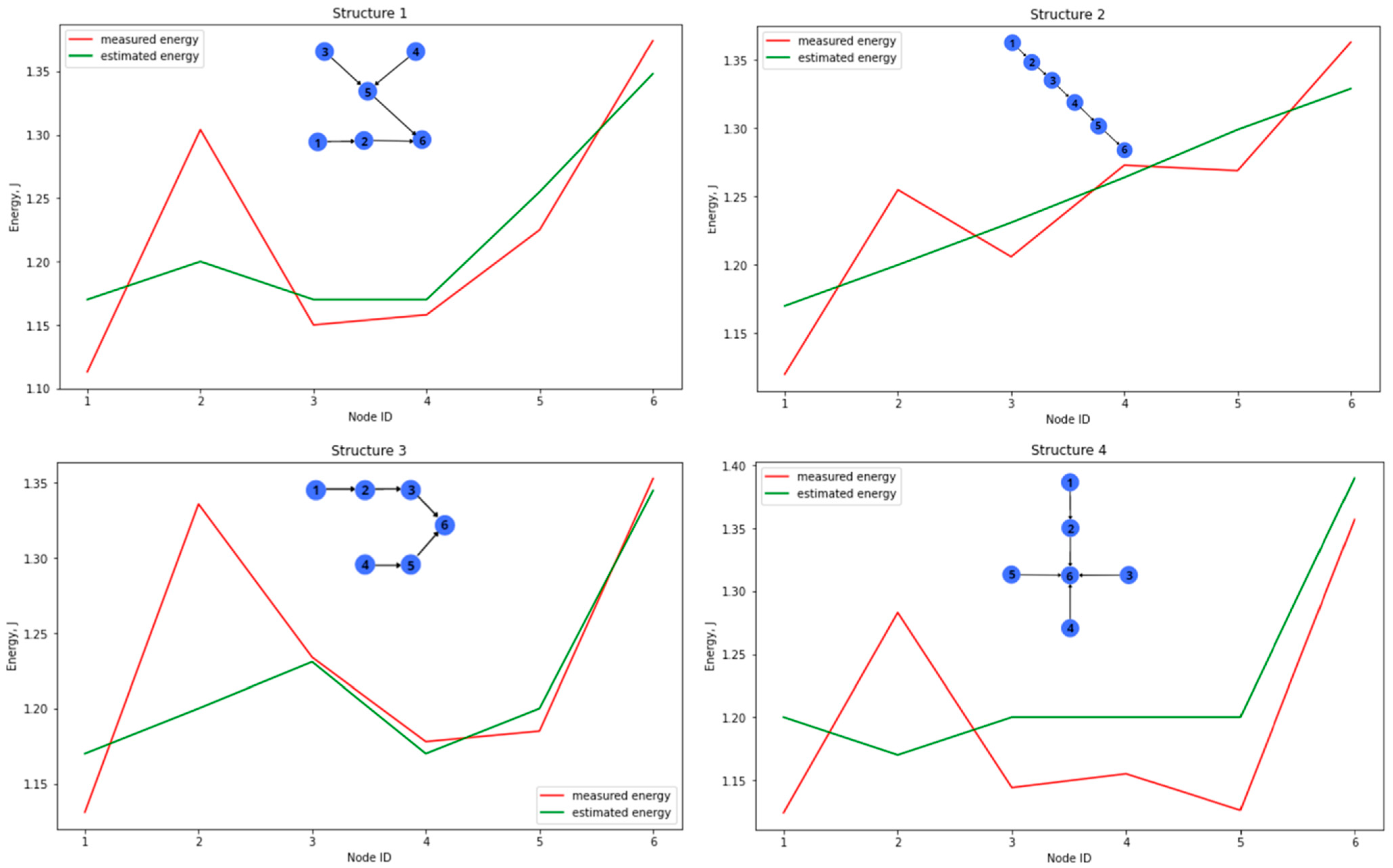
Figure 13 illustrates the measurement tests related to four different topological network structures of 6 nodes. Estimation models (in red) are compared with real measurements (in green), allowing us to observe model deviation phenomena, and to decide if a reconfiguration of the network is needed. All the platform (hardware and software) is constructed as the observation and control functions can be fully centralized or, on the contrary, fully delegated with local decisions on nodes. Hybrid architectures can also obviously be implemented. As depicted in
Figure 13, the results show that the energy estimation model corresponds to measures with an average error of 5% and a maximum error of 10%, found for node 2. Indeed, the energy consumption of node 2 is always greater than the estimated one. This could be explained by a slight difference between the model formalization and the protocol implementation. This gap is not a problem because, in the reconfiguration context, the tendencies are more important than the values. Moreover in future works, we aim to continuously adapt the energy estimation models online.
4.3. Network Composition and Reconfiguration with Energy Analysis
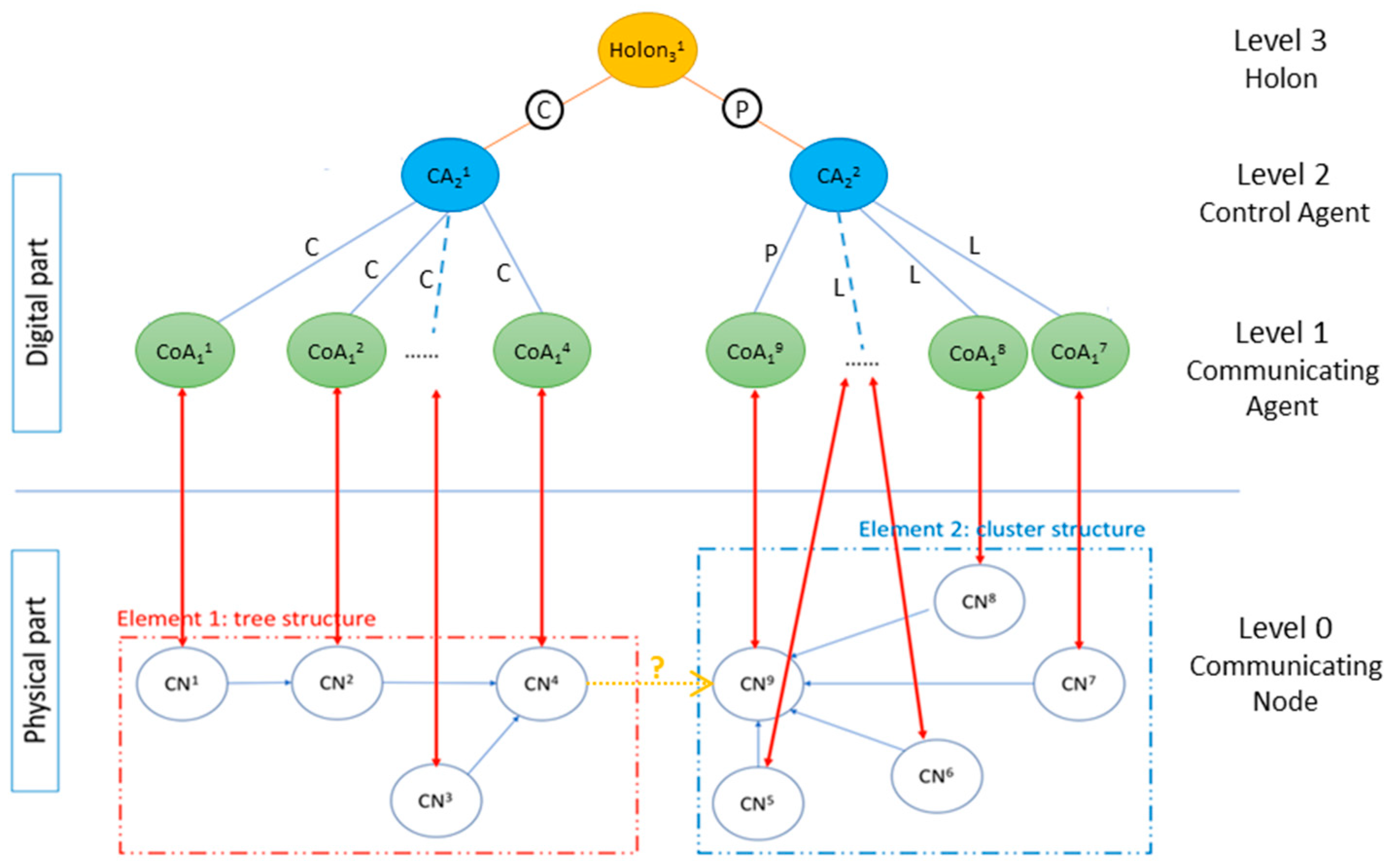
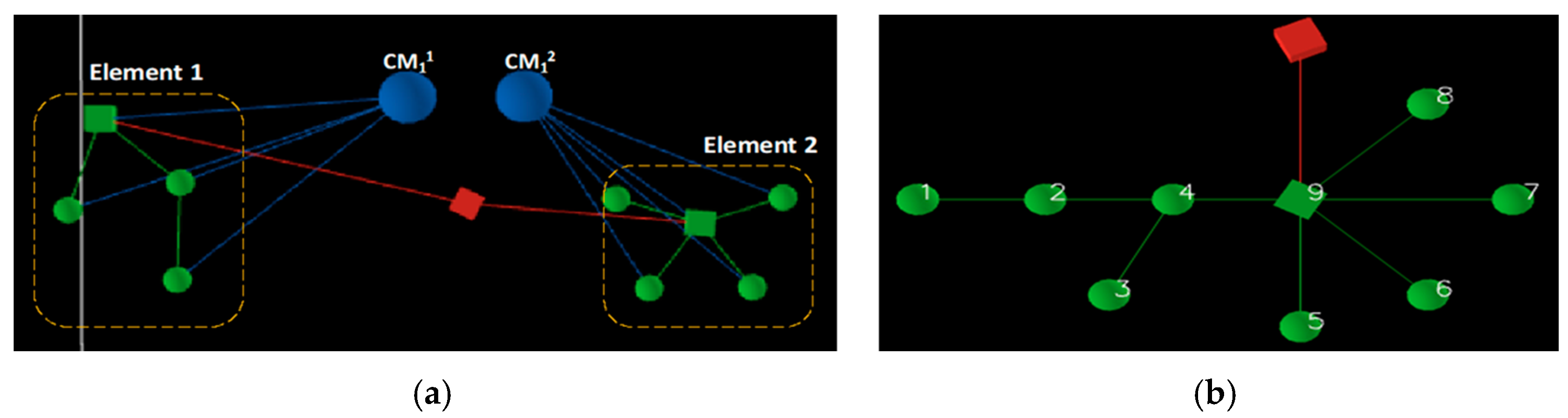
Figure 14 reveals another aspect of SADHoA-WSN functioning. The physical part represents the WSNs inserted in material elements (a 4-node tree in element 1, and 5-node cluster in element 2) and the control architecture appears on the digital part. Communicating Agents (CoA) representing CNs from the same material (or element) are gathered and controlled by upper-level agent: CA
21 is the Control Agent of Element 1 with coercive government parameters with all CoA and CA
22 is the Control Agent of Element 2 with a permissive delegation to CoA
19 (cluster head) and limited with other CoA.
In some applications, communicating elements may cooperate to complete some special tasks. For example, in
Figure 14, when Elements 1 and 2 are meeting, a Holon agent is created to supervise CA
21 and CA
22. The Holon agent is able to study if the two elements may aggregate their networks (for example, in order to share data or extend their lifetime) and a possible solution of reconfiguration is shown with the orange arrow between CN
4 and CN
9.
The digital models for those two elements are implemented in Holon Level (in NetLogo software 6.4.0 in our platform), as shown in
Figure 15, and the multi-agent simulator proposes a network fusion, as described in
Figure 15, and corresponding to the orange arrow of the previous figure.
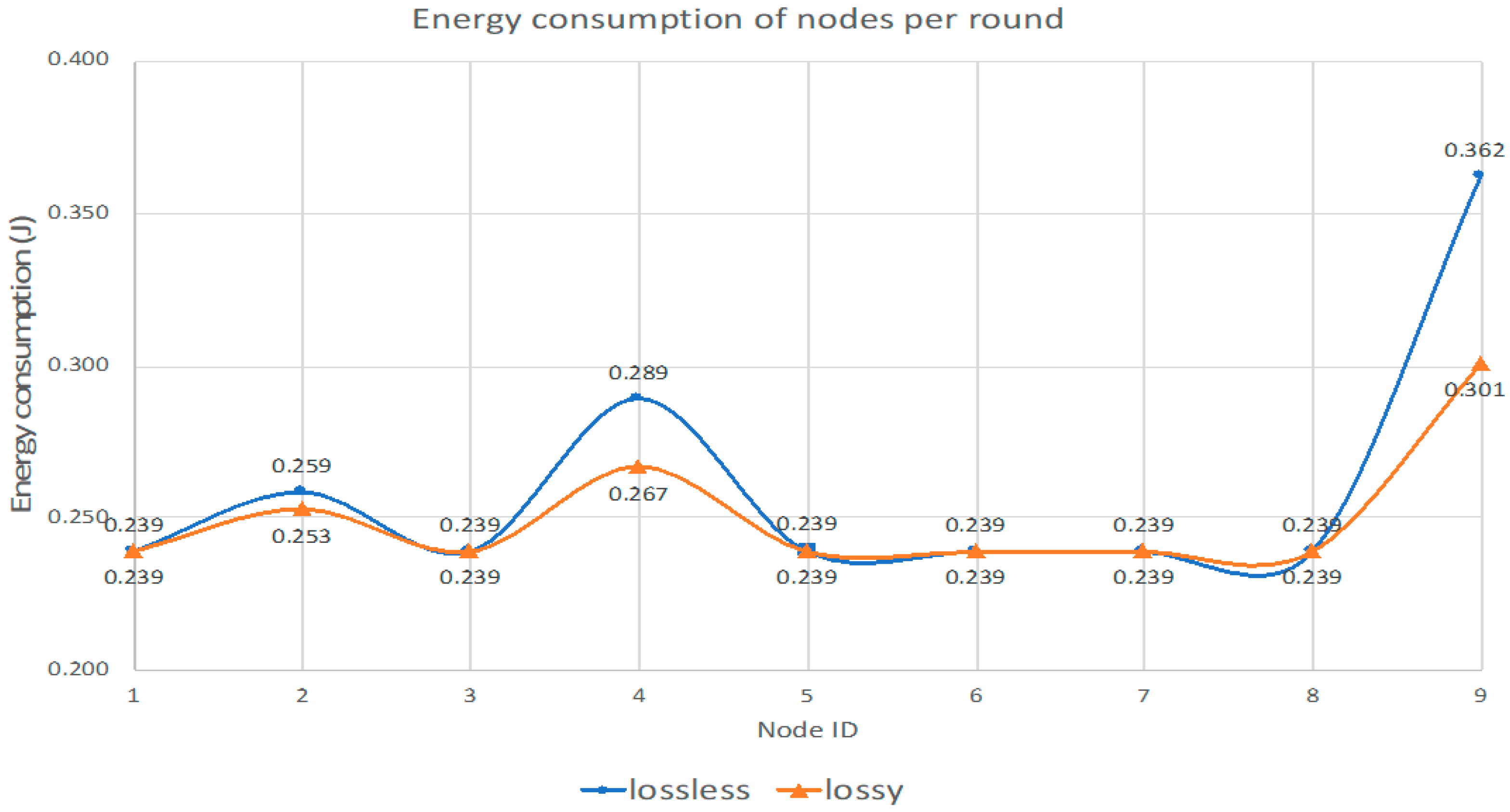
Energy consumption of the future possible network can then be analyzed. To decide if the new configuration must be applied, and based on the previous element independent energy consumption, future energy consumption predictions for each node can be observed in
Figure 16. Energy consumption for the end nodes (nodes 1, 3, 5, 6, 7, 8) is the same for both lossless and lossy strategies because they do not have a child node. For the others, the more child nodes, the more energy it consumes.
This section shows some results and experimentations to develop SADHoA-WSN functionalities and to reveal its pertinence for dynamically controlling and minimizing energy consumption in communicating material applications and more generally in WSN or IoT applications. These first results already show the interest in proposing such SADHoA-WSN. All the functionalities are developed, but “Configuration exploration” and “Control strategy exploration” (cf. the overall process described in
Figure 8) are currently under development.
5. Conclusions and Perspectives
This paper addresses the issue of energy consumption and sustainability control in wireless sensor networks (WSNs), focusing on the specific case of communicating materials used in the context of Structure Health Monitoring for the construction industry. Current research in WSNs tackles the reconfiguration problem using either centralized or distributed solutions but rarely considers hybrid solutions that combine both approaches, unlike the manufacturing sector, where hybrid solutions have been explored for years. Accordingly, this article proposes the SADHoA-WSN framework, composed of a three-layer structure that supports a three-level dynamic process. Each level requires specific functions, integrated into D-Agents or Communication Agents. Due to space constraints, the various sequence diagrams that complement the class diagram and support the overall process are not described here. Implementing this architecture is challenging, as it requires constructing each layer from the base to the top, selecting the best-suited algorithms for each functionality, and testing the entire structure. The final section describes the current implementation efforts. The implementation environment is detailed, with a focus on different existing functionalities. Future work will involve developing the remaining functionalities of SADHoA-WSN and conducting experiments on various application cases (manufacturing, healthcare, etc.) and constraints (node mobility, network security, etc.), always guided by the overall energy consumption.
SADHoA-WSN is highly promising as it proposes a reconfiguration framework based on a holonic approach. This approach, initially developed and proven in the manufacturing industry, has not yet been implemented in network systems. Holonic methodologies have demonstrated their applicability and effectiveness in various industrial contexts, suggesting significant potential when adapted to network environments. This framework leverages the inherent flexibility and robustness of holonic systems, which can lead to more adaptive and resilient network configurations.
Importantly, this framework could pave the way for greener solutions in sensor networks. By optimizing reconfiguration processes, energy consumption in these networks can be significantly reduced, contributing to more sustainable and environmentally friendly operations. This is particularly relevant in the context of new construction projects, where integrating sustainable technologies is becoming increasingly critical.
Our framework not only offers technical innovations but also aligns with broader goals of sustainability and environmental responsibility. While the entire framework is still under testing, some parts have already been validated on laboratory prototypes and industrial applications [
2]. It lays a robust foundation for future research, with the promise of transforming network reconfiguration processes and contributing to the development of more sustainable infrastructure. This positions our research as a key step towards innovative and eco-friendly technological advancements in network systems.
Ensuring the sustainability of communication networks (IoT, 5/6G, etc.) has become a central issue to address. Public acceptance of these new technologies will depend not only on demonstrating that the next generation consumes less energy than the previous one but also on dynamically controlling their operation to provide greater adaptability and optimize their lifespan. This work lays the groundwork for optimized energy control in IoT networks. Undoubtedly, there are still significant energy challenges to overcome in the future, such as dynamic energy management, integration of renewable energy sources, and energy efficiency in edge computing.
Author Contributions
Holonic Architecture Conceptualization, P.A.; Resources, O.C.; Experiments and Writing—original draft, review & editing, W.D., M.D. and S.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Meyer, G.G.; Främling, K.; Holmström, J. Intelligent products: A survey. Comput. Ind. 2009, 60, 137–148. [Google Scholar] [CrossRef]
- David, M.; Derigent, W.; Loubet, G.; Takacs, A.; Dragomirescu, D. Communicating Materials: Communicating Concrete Development for the Construction Industry. IEEE Trans. Ind. Inform. 2024, 20, 6983–6994. [Google Scholar] [CrossRef]
- Rault, T.; Bouabdallah, A.; Challal, Y. Energy efficiency in wireless sensor networks: A top-down survey. Comput. Netw. 2014, 67, 104–122. [Google Scholar] [CrossRef]
- Ouni, R.; Saleem, K. Framework for Sustainable Wireless Sensor Network Based Environmental Monitoring. Sustainability 2022, 14, 8356. [Google Scholar] [CrossRef]
- Ramesh, M.; Prabha, R.; Thirugnanam, H.; Devidas, A.; Raj, D.; Anand, S.; Pathinarupothi, R. Achieving sustainability through smart city applications: Protocols, systems and solutions using IoT and wireless sensor network. CSI Trans. ICT 2020, 8, 213–230. [Google Scholar] [CrossRef]
- Li, C.Z.; Guo, Z.; Xiao, B.; Tam, V.W. The Application of Advanced Information Technologies in Civil Infrastructure Construction and Maintenance. Sustainability 2022, 14, 7761. [Google Scholar] [CrossRef]
- Verma, V.; Kumar, V. Review of MAC Protocols for Energy Harvesting Wireless Sensor Network (EH-WSN); Springer: Cham, Switzerland, 2020. [Google Scholar]
- Rup, C.; Bajic, E. Green and sustainable Industrial Internet of Things systems leveraging wake-up radio to enable on-demand IoT communication. Sustainability 2024, 3, 1160. [Google Scholar] [CrossRef]
- Yang, L.; Lu, Y.; Xiong, L.; Tao, Y.; Zhong, Y. A Game Theoretic Approach for Balancing Energy Consumption in Clustered Wireless Sensor Networks. Sensors 2017, 17, 2654. [Google Scholar] [CrossRef]
- Abdul-Qawy, A.; Alduais, N.; Saad, A.; Taher, M.; Nasser, A.; Saleh, S.; Khatri, N. An enhanced energy efficient protocol for large-scale IoT-based heterogeneous WSNs. Sci. Afr. 2023, 21, e01807. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000; p. 10. [Google Scholar]
- Zhang, D.; Li, G.; Zheng, K.; Ming, X.; Pan, Z.-H. An energy-balanced routing method based on forward-aware factor for wireless sensor networks. IEEE Trans. Ind. Inform. 2013, 10, 766–773. [Google Scholar] [CrossRef]
- Khan, M.N.; Rahman, H.U.; Almaiah, M.A.; Khan, M.Z.; Khan, A.; Raza, M.; Al-Zahrani, M.; Almomani, O.; Khan, R. Improving energy efficiency with content-based adaptive and dynamic scheduling in wireless sensor networks. IEEE Access 2020, 8, 176495–176520. [Google Scholar] [CrossRef]
- Yarinezhad, R. Reducing delay and prolonging the lifetime of wireless sensor network using efficient routing protocol based on mobile sink and virtual infrastructure. Ad Hoc Netw. 2019, 84, 42–55. [Google Scholar] [CrossRef]
- Kobo, H.; Abu-Mahfouz, A.; Hancke, G. A Survey on Software-Defined Wireless Sensor Networks: Challenges and Design Requirements. IEEE Access 2017, 5, 1872–1899. [Google Scholar] [CrossRef]
- Kherbache, M.; Ahmed, A.; Maimour, M.; Rondeau, E. Constructing a network digital twin through formal modeling: Tacling the virtual-real mapping challenge in IIoT networks. Internet Things 2023, 24, 101000. [Google Scholar] [CrossRef]
- Almasan, P.; Galmés, M.; Paillissé, J.; Suárez-Varela, J.; Perino, D.; Lopez, D.; Perales, A.; Harvey, P.; Ciavaglia, L.; Wong, L.; et al. Network Digital Twin: Context, Enabling Technologies, and Opportunities. IEEE Commun. Mag. 2022, 60, 22–27. [Google Scholar] [CrossRef]
- Erman, B.; Martino, C. Generative Network Performance Prediction with Network Digital Twin. IEEE Netw. 2023, 37, 286–292. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, H.; Wu, X.; Shu, L. An energy-efficient SDN based sleep scheduling algorithm for WSNs. J. Netw. Comput. Appl. 2016, 59, 39–45. [Google Scholar] [CrossRef]
- Hajian, E.; Khayyambashi, M.R.; Movahhedinia, N. A mechanism for load balancing routing and virtualization based on SDWSN for IoT applications. IEEE Access 2022, 10, 37457–37476. [Google Scholar] [CrossRef]
- Segura, G.A.N.; Margi, C.B. Centralized energy prediction in wireless sensor networks leveraged by software-defined networking. Energies 2021, 14, 5379. [Google Scholar] [CrossRef]
- Esmaeili, A.; Mozayani, N.; Motlagh, M.R.J.; Matson, E.T. A socially-based distributed self-organizing algorithm for holonic multi-agent systems: Case study in a task environment. Cogn. Syst. Res. 2017, 43, 21–44. [Google Scholar] [CrossRef]
- Van Brussel, H.; Wyns, J.; Valckenaers, P.; Bongaerts, L.; Peeters, P. Reference architecture for holonic manufacturing systems: PROSA. Comput. Ind. 1998, 37, 255–274. [Google Scholar] [CrossRef]
- Leitão, P.; Restivo, F. ADACOR: A holonic architecture for agile and adaptive manufacturing control. Comput. Ind. 2006, 57, 121–130. [Google Scholar] [CrossRef]
- Jimenez, J.-F.; Bekrar, A.; Zambrano-Rey, G.; Trentesaux, D.; Leitão, P. Pollux: A dynamic hybrid control architecture for flexible job shop systems. Int. J. Prod. Res. 2017, 55, 4229–4247. [Google Scholar] [CrossRef]
- Derigent, W.; David, M.; André, P.; Cardin, O. Generic Aggregation Model for Reconfigurable Holonic Control Architecture–The GARCIA Framework. In International Workshop on Service Orientation in Holonic and Multi-Agent Manufacturing; Springer: Cham, Switzerland, 2022; pp. 407–422. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}