1. Introduction
In recent years, driven by the national “dual-carbon” policy, the electric vehicle (EV) industry in China has been flourishing. A large number of EVs have been integrated into the power grid, but this has also brought new challenges to the stable and secure operation of the grid. In industrial parks with high EV penetration rates, the charging behavior of EVs during peak electricity consumption periods has increased the peak load on the grid. This has led to unfavorable effects, such as increased peak-to-valley difference, load fluctuation rate, and maximum load ratio, which have further burdened the distribution grid and affected the security of grid operation. Accurately predicting EV charging loads is a necessary task in the early stages of EV development.
Currently, the methods for predicting EV loads can be mainly categorized into two types: statistical simulation-based methods and machine learning-based methods. Statistical simulation-based methods primarily employ Monte Carlo simulation for load predictions. This research process has evolved from strict assumptions to releasing restrictions on EV types, charging power, and date types. Reference [
1] focuses on the number of EVs in order to simulate EVs’ unordered charging behavior by conducting Monte Carlo simulations on the battery characteristics and user travel habits of EVs. References [
2,
3,
4,
5] simulates the unordered charging behavior of EVs from four perspectives, namely seasonal characteristics, travel path conditions, multi-dimensional states of EVs, and scene correlations, and successfully predicts EV charging loads. Reference [
6] proposes a new charging load prediction method based on the characteristics of EVs’ charging behavior and nonlinear programming. Reference [
7] predicts the charging load of privately owned EVs in Beijing by studying the characteristics of EV travel patterns, urban road networks, functional area distributions, and the distribution of charging infrastructure. Additionally, to further enhance the accuracy of load forecasting, researchers have also incorporated traffic conditions and user psychology as significant factors into considerations for model construction. Reference [
8] integrates various methods, such as the Gaussian Mixture Model, Floyd’s algorithm, and real-time energy consumption models, to construct a microscopic traffic simulation model. Based on this, it proposes a framework for predicting EV charging load, which is driven by electricity prices and involves real-time interaction with network information. References [
9,
10,
11] take the user’s psychology as the starting point, comprehensively considering multi-source information such as ambient temperature, real-time electricity prices, and traffic network conditions. Based on existing theories and methods, such as the trip chain and OD matrix, the Monte Carlo method is successfully applied to predict the spatiotemporal charging demands of electric vehicles under different scenarios. However, traditional load prediction algorithms face difficulties in constructing mathematical models for load variation patterns and influencing factors when dealing with the high randomness, volatility, and spatial differences in EV charging loads. Moreover, the prediction results often have a certain lag.
Machine learning-based EV load prediction methods mainly use neural networks for prediction. Neural networks, as powerful machine learning tools, have excellent versatility, scalability, and fault tolerance and exceptional nonlinear mapping capabilities. This makes them particularly advantageous in handling complex regression problems, especially in predicting electricity consumption loads in power systems. Reference [
12] proposes a novel EV load prediction model, ISSA-CNN-GRU, by integrating the feature extraction advantages of a CNN, the time-series data processing capability of a GRU, and the ISSA optimization algorithm. Reference [
13] significantly improves the prediction accuracy of the LSTM model by analyzing the weights of various influencing factors and making adjustments. References [
14,
15,
16,
17] all take Graph Neural Networks as the starting point and propose several new electric vehicle load forecasting models. Reference [
18] uses a GAN to generate missing load data to mitigate the impact of low-quality EV load data on prediction results and improves the performance of the LSTM model using a new gating mechanism called Mogrifier. Reference [
19] incorporates the gray theory into EV load prediction for control systems and analyzes the role of the EMGM (Enhanced Multivariate Gray Model) in considering multiple influencing factors and eliminating cumulative errors. Reference [
20] proposes the MCCNN-TCN load prediction model by combining the fluctuation feature extraction capability of the MCCNN model in the time scale and the time series prediction capability of TCN. Reference [
21] proposes an electric vehicle charging load forecasting model that integrates a Genetic Algorithm (GA) with a Back Propagation Neural Network (BPNN). This model optimizes the weights and thresholds of the BPNN through the GA, thereby enhancing the accuracy and efficiency of the predictions. Reference [
22] employs variational mode decomposition (VMD) to separate charging load data into high-frequency and low-frequency components, which are then forecasted using LSTM neural networks and the Prophet model, respectively. The experimental results demonstrate that this method exhibits significant advantages in terms of prediction accuracy and effectiveness. Given the remarkable performance of Transformer models in various fields in recent years, an increasing number of researchers are attempting to integrate attention mechanisms with neural networks, aiming to enhance the predictive capabilities of these models. References [
23,
24,
25] integrate attention mechanisms with recurrent neural network models, such as Long Short-Term Memory (LSTM) and a Gated Recurrent Unit (GRU), significantly enhancing the algorithm’s capability to capture dependencies and correlations in time series data. The experimental results indicate that the models with attention mechanisms have achieved a notable improvement in various performance metrics for prediction outcomes. Although machine learning-based EV load prediction methods have been widely applied, there is still a lack of research on the impact of date types on the accuracy of each machine learning method and the selection of machine learning methods suitable for different date types.
The prediction of electric vehicle (EV) charging is a critically important topic. Scholars from both domestic and international backgrounds have proposed numerous constructive methods from various perspectives. These efforts have provided theoretical knowledge reserves and practical references for constructing a framework for predicting EV charging loads in industrial parks. However, there are still some limitations and deficiencies in the current study, which are summarized as follows:
(1) In the field of electric vehicle (EV) charging prediction and site selection, existing research predominantly focuses on urban-level regional data for charging load forecasting, with relatively limited attention being given to industrial parks, which are special areas characterized by industrial concentration.
(2) For traditional load forecasting methods, current research is quite stringent regarding the precision of mathematical modeling and the design of assumptions. Moreover, the forecasting results often exhibit a certain degree of lag.
(3) For machine learning methods, existing research indeed lacks in-depth theoretical exploration regarding the selection of prediction models for different types of dates in the context of electric vehicle charging.
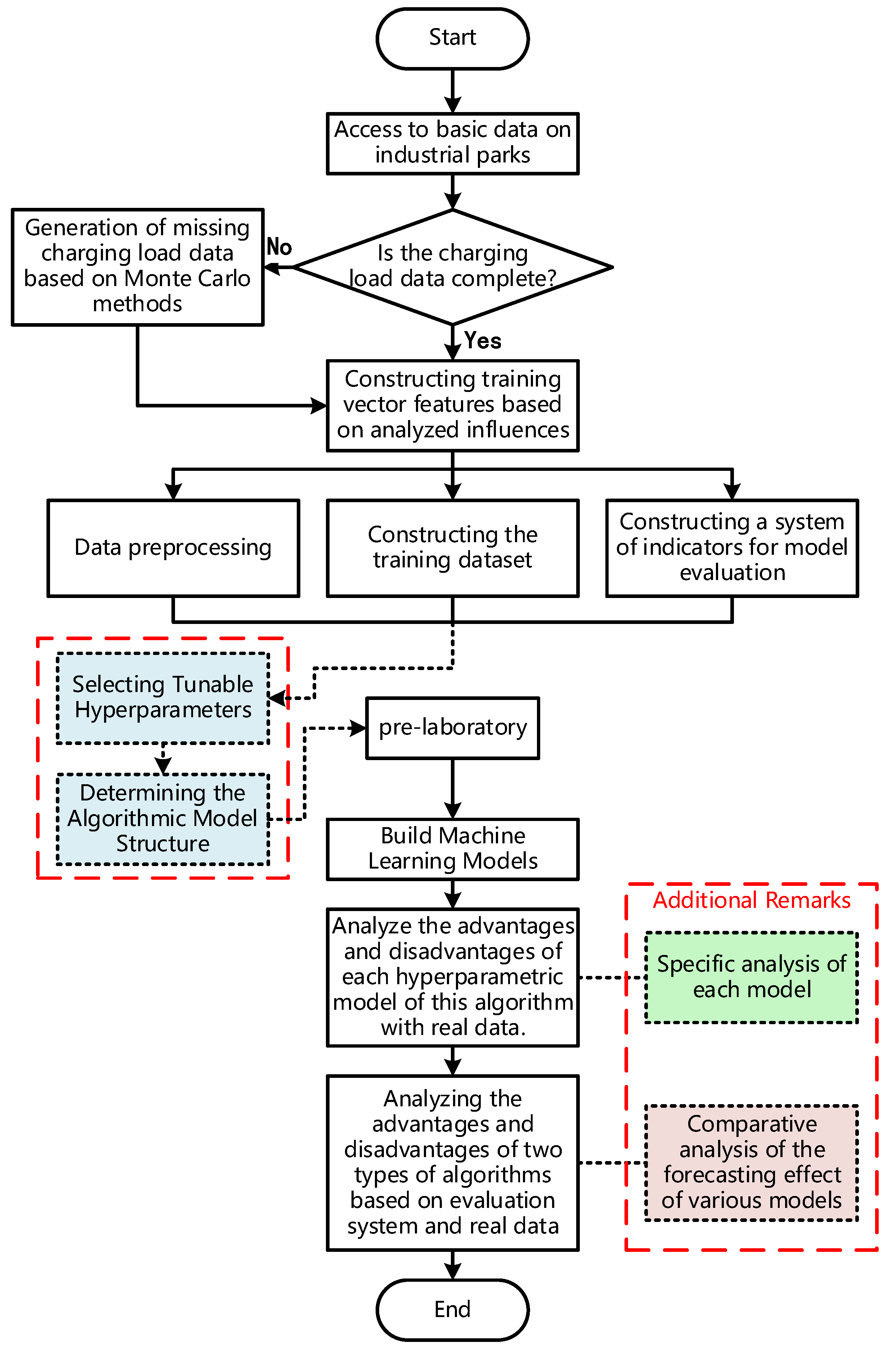
In response to the aforementioned limitations, particularly the issue of model selection for different date types, this study constructs a framework for electric vehicle charging load prediction in industrial park scenarios, taking into account various date types. This framework is grounded in two machine learning algorithms: MLP and LSTM. Moreover, an evaluation index system and assessment algorithms are developed to evaluate the predictive performance of specific models under different date types.
3. Industrial Park Electric Vehicle Charging Load Forecasting Model
3.1. Prediction Model Based on Multilayer Perceptron (MLP)
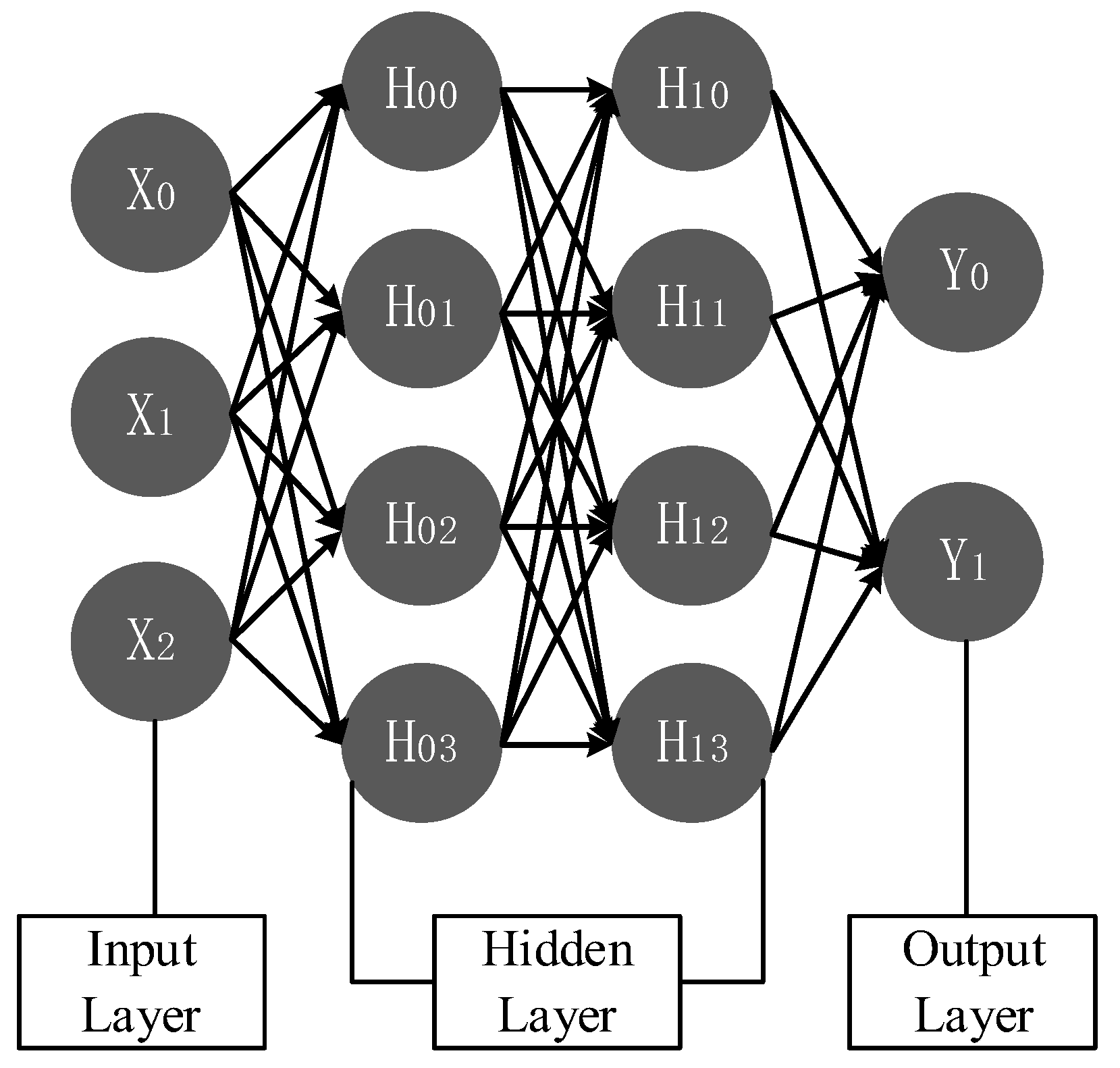
Multilayer Perceptron (MLP) is an advanced form of single-layer perceptron and belongs to the category of feedforward artificial neural networks. The architecture of this network consists of at least three layers: an input layer, one or more hidden layers, and an output layer. MLP transmits information through the connections between these layers and uses nonlinear activation functions to handle and solve more complex problems.
Figure 3 shows the structure of a multilayer perceptron model with two hidden layers.
The functions of the three layers in MLP are as follows:
Input Layer: This receives various raw data, where each input unit represents a data feature that needs attention;
Hidden Layers: This uses nonlinear activation functions to transform and process the input data, thereby extracting features from the input data;
Output Layer: This receives the features extracted by the hidden layers and, based on the weight parameters obtained from model training, makes the final decision or prediction.
During the training process, the first step is to calculate the output value of the nodes. For node
in the
layer of the multilayer perceptron, its output
is calculated using the following formula:
In the formula, represents the value of node in the layer, represents the activation function, is the connection weight between node in the layer and the current node, is the value of node in the layer, and is the bias parameter of the current node.
Next, it is necessary to calculate the loss value between the output value and the true value, which is typically carried out using either the Mean Squared Error (MSE) or Cross-Entropy methods (CE). The calculation formulas are as follows:
In the formula, is the number of samples, is the true value of samples, and is the predicted value of samples.
Finally, the weights are updated from the output layer to the input layer by calculating the gradient of the loss function with respect to the weights of each layer. The specific calculation formulas are as follows:
Weight Gradient Calculation Formula:
In the formula, L is the value loss, and is the learning rate of the model.
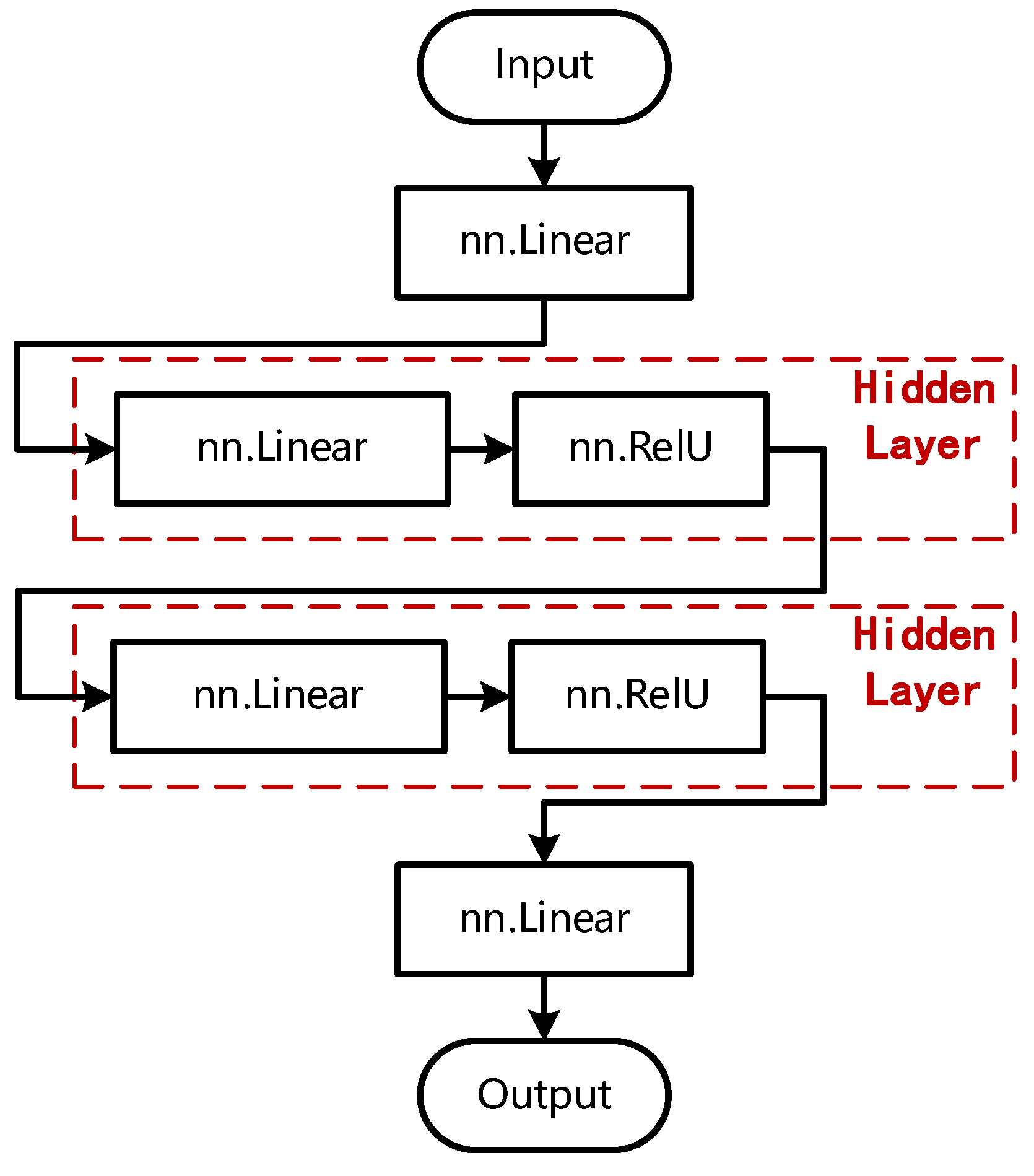
The industrial park electric vehicle charging load MLP prediction model is shown in
Figure 4.
3.2. Prediction Model Based on Long Short-Term Memory Network (LSTM)
In the early stages of neural network-based power load forecasting, researchers typically used Recurrent Neural Networks (RNNs) to predict power load conditions [
30]. However, during training, RNNs faced issues such as vanishing and exploding gradients caused by the backpropagation algorithm. These issues were particularly pronounced when dealing with long sequences of data, making it difficult for RNNs to effectively learn long-distance temporal dependencies in time series data.
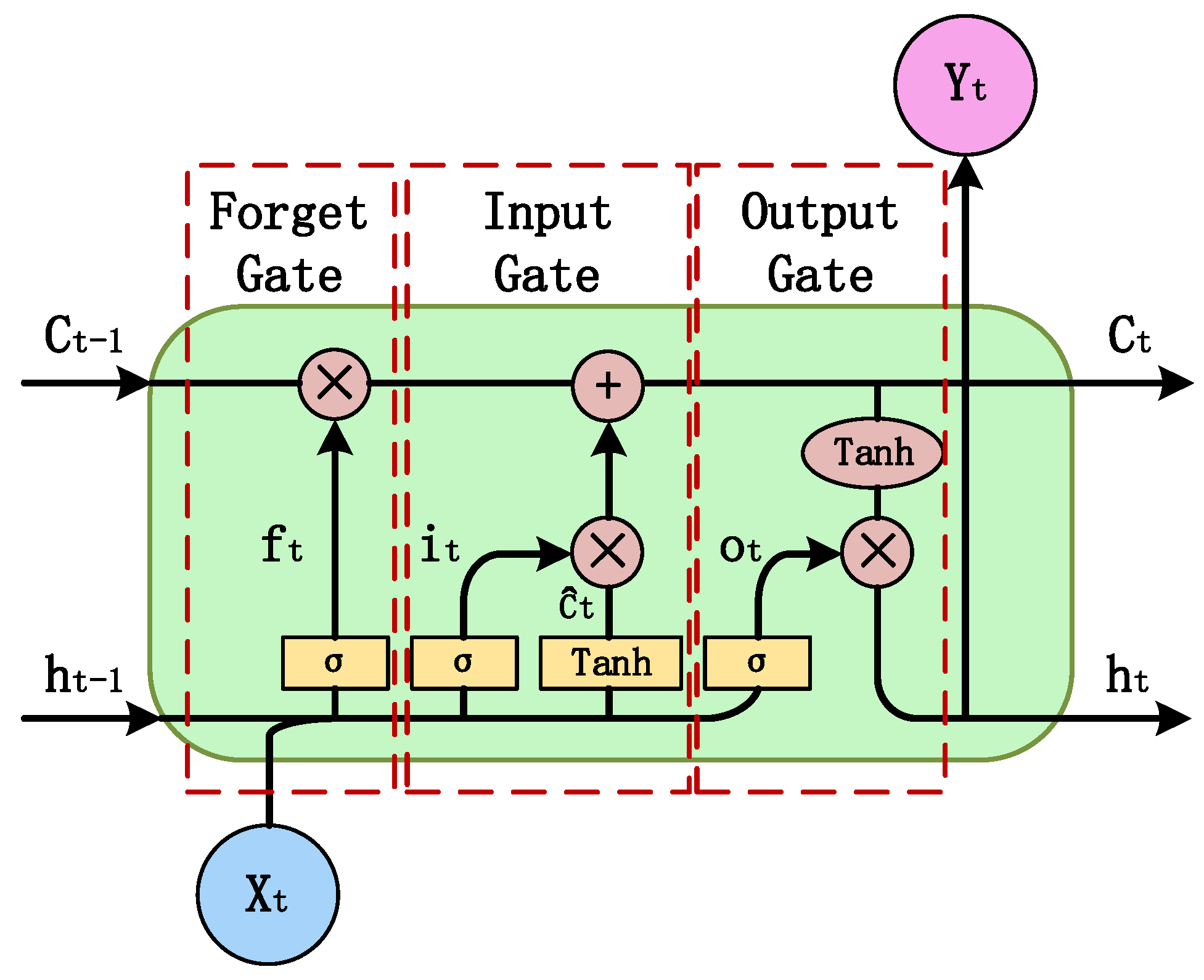
To address this problem, Shi X et al. [
31] proposed a neural network structure composed of three gate structures, forget gate, input gate, and output gate, known as Long Short-Term Memory (LSTM). The architecture of an LSTM neuron is shown in
Figure 5.
The functions of the three gates in LSTM are as follows:
Forget gate: This determines which information should be forgotten from the previous cell state.
Input gate: This determines which input information at this time will be stored in the current cell state.
Output gate: This determines which information from the current cell state will be output to the next hidden state.
During the training process, first, the forget gate selectively erases some content from the previous memory cell based on the previous hidden state
and the current input
. The calculation formula is as follows:
In the formula, represents the hidden layer state from the previous time step, represents the input state at the current time step, represents the Sigmoid activation function, is the weight parameter of the forget gate, and is the bias parameter of the forget gate.
Next, the input gate integrates new information into the memory cell processed by the forget gate based on the previous hidden state
and the current input
. The calculation formulas are as follows:
In the formula, is the Tanh activation function, is the candidate memory cell for the new state, is used to decide which memory cells need to be updated, and are the weight parameters of the input gate, and and are the bias parameters of the input gate.
Finally, the output gate calculates the current hidden state
and the current output
based on the previous hidden state
. the current input
, and the results of the forget gate and input gate. The calculation formulas are as follows:
In the formula, is the weight parameter of the output gate, is the bias parameter of the output gate, and represents matrix multiplication.
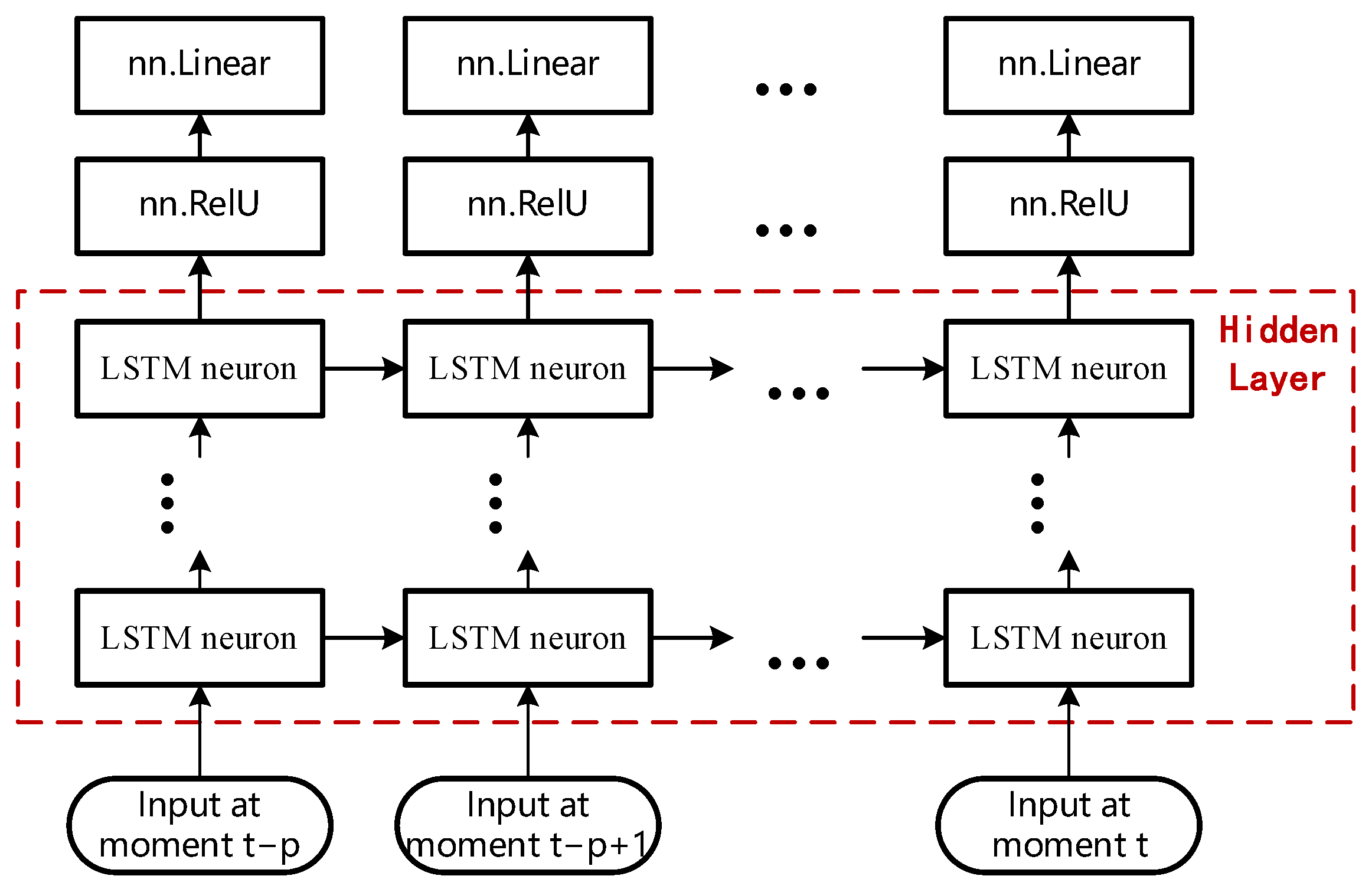
The industrial park electric vehicle charging load LSTM prediction model is shown in
Figure 6.
6. Conclusions
By addressing the prediction challenges of high randomness, high volatility, and significant spatial variability in electric vehicle charging loads in industrial parks, this paper constructs predictive models based on the MLP and LSTM machine learning algorithms. Through case studies, machine learning models are established and successfully predict the electric vehicle charging load in industrial parks within the next 24 h. The main conclusions are as follows:
(1). For industrial parks with relatively uniform types and uses of electric vehicles, the dataset structure and solution process proposed in this study can achieve an accurate prediction of electric vehicle charging loads.
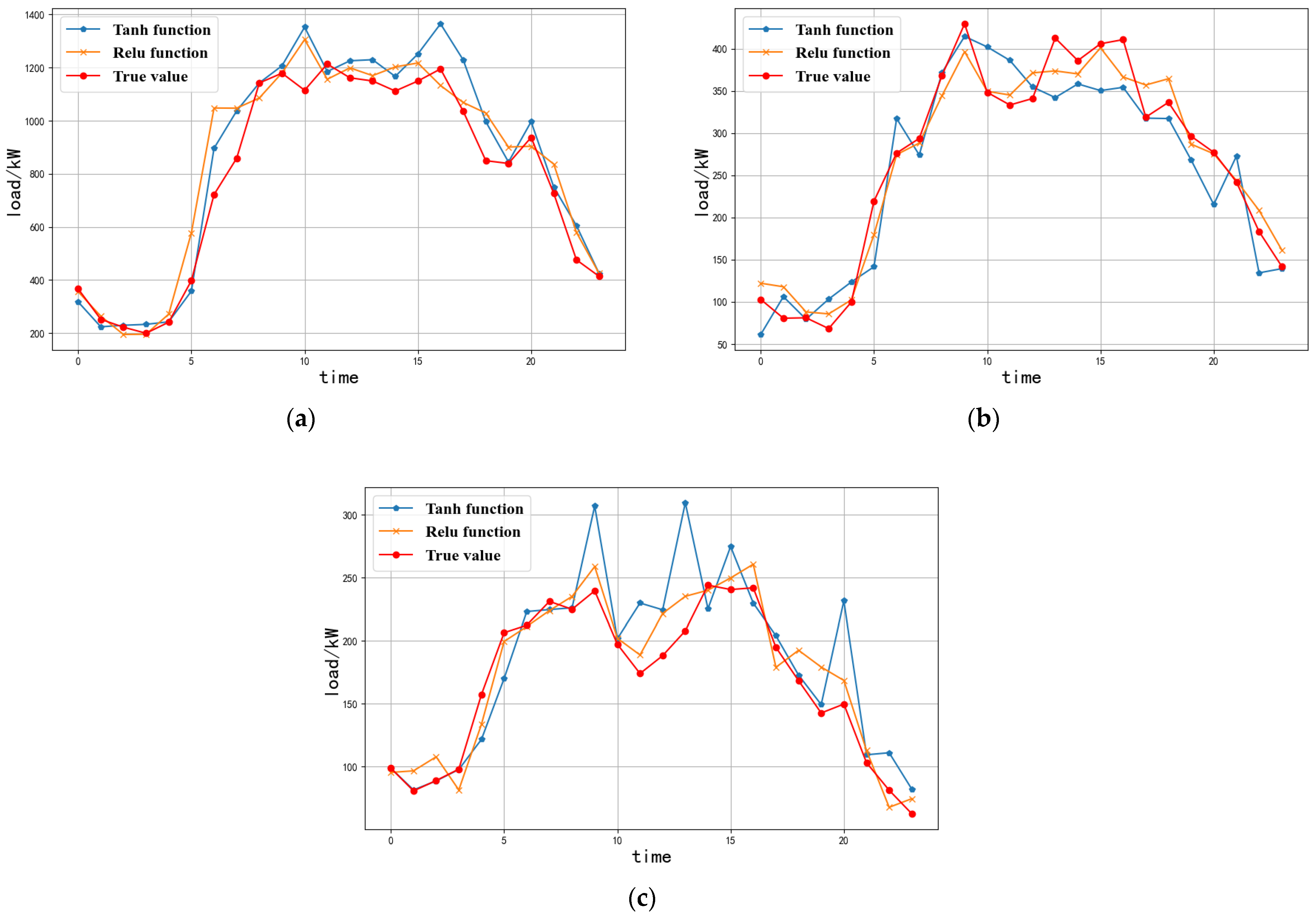
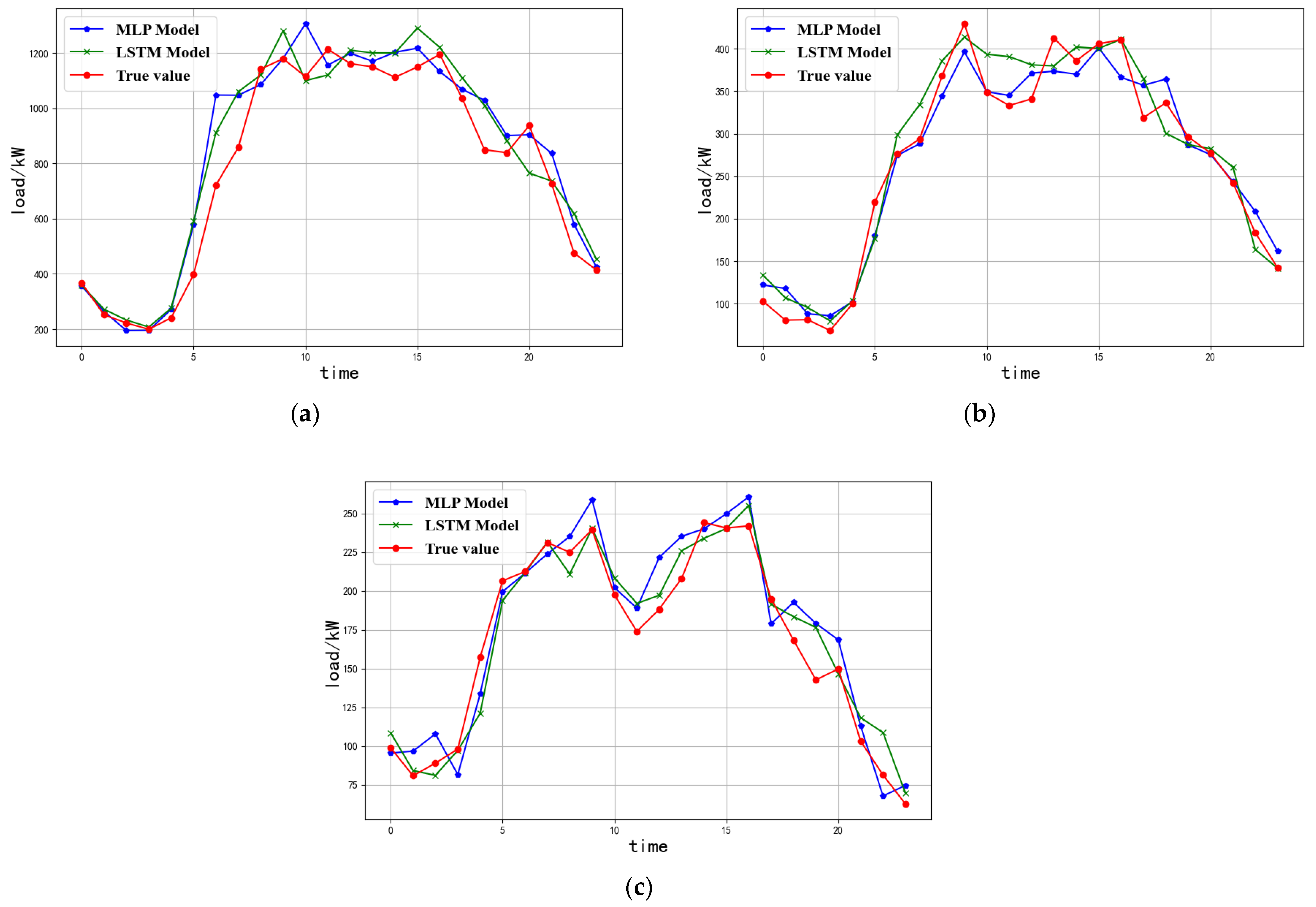
(2). In predicting electric vehicle charging loads during normal working days and statutory holidays, the Long Short-Term Memory (LSTM) algorithm stands out as the most effective. However, during weekend holidays, when continuous data are limited, the Multilayer Perceptron (MLP) algorithm demonstrates superior performance.
The findings of this research can provide a reference for predicting electric vehicle charging loads in similar industrial parks and offer decision-making support for the construction and selection of electric vehicle infrastructure planning within these parks.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}