1. Introduction
The rapid and constant growth of populations and increase in urbanization has led to a sharp increase in municipal solid waste (MSW) generation, which seriously affects the social economy and environment. The management of MSW primarily encompasses five key components: production, delivery, collection, transportation, and recycling. Collection and transportation play crucial roles in connecting the initial drop-off point of waste to the final treatment process. During the collection and transport process, we often need to consider many influencing factors, such as the social factor of residents’ involvement in waste disposal and the method used for waste collection and transportation. At present, the modes of MSW collection and transportation can be categorized based on the following five factors: (1) whether the time of collection and transportation schedule is fixed, i.e., whether the vehicle collects and transports the waste in the city during a fixed period; (2) whether the location of the waste collection point is fixed, i.e., whether the node of the waste that the vehicle collects and transports every day is fixed; if it is fixed, then the phenomenon of waste piling up can occur, causing collection and transportation to run off-schedule; (3) whether it is classified for collection and transportation; (4) whether the vehicle uses an independent collection or joint collection mode; (5) and whether there is a transfer station; if there is a transfer station, the vehicle will transport the waste to the transfer station, and if not, the vehicle will transport the waste directly to the disposal site. Collection and transportation are considered high-cost components, comprising approximately 65–80% of the overall cost of waste management [
1]. For many years, researchers have been concerned about the vehicle routing problem (VRP) of waste collection. It has been demonstrated through empirical evidence that the implementation of an efficient waste collection path can result in a substantial reduction in costs. Nevertheless, in light of the advancements in green and low-carbon cities, some researchers have proposed the green vehicle routing problem (GVRP) to reduce carbon emissions of the path.
The arc routing problem (ARP) can also be utilized for waste collection routing. Ghiani et al. [
2] conducted a study for MSW collection and built an ARP to minimize the total distance traveled by the vehicles by first assigning arcs/edges to vehicles through clustering and then matching routes for the vehicles. The experimental results showed that the proposed system enables individuals to avoid overtime and reduces the total cost of the vehicles by 10%. Willemse and Joubert [
3] researched the mixed capacity arc routing problem under time restrictions with intermediate facilities. Their research aimed to identify the best-performing constructive heuristic in terms of computational time and ability to find the least costly solution and smallest fleet size. The method that they employed to evaluate randomized heuristics is also of value to future studies on CARPs. In 2019, Willemse and Joubert [
4] extended upon the constructive heuristic research conducted on the mixed capacitor arc routing problem under intermediate facility time constraints (MCARPTIF) from the research published in 2016 [
3]. More advanced local search acceleration mechanisms from the literature were adapted and combined with the MCARPTIF and tested on the same instances. The execution time of the algorithm was decreased; however, the local search yielded poorer solutions. Lu et al. [
5] focused on formulating and solving rich arc routing problems (RARPs) in city logistics in a congested urban environment. The authors proposed an analytical methodology that utilized a fluid queue model to calibrate link travel time. The calibration was achieved through the use of a polynomial arrival rate function. The systemic (social) impacts of vehicle routes were derived analytically and incorporated into an RARP model, where operational costs and social impacts were systematically considered in the design of route strategies and compared with examples at three different scales. Ghiani et al. [
6] employed a new ant colony optimization procedure for the arc routing problem with intermediate facilities under capacity and length restrictions (CLARPIF), and the computational results showed substantial improvements. Mourão and Amado [
7] proposed a new heuristic to generate feasible solutions for the extended CARP on hybrid graphs by constructing Eulerian and directed networks to generate feasible vehicle journeys based on selected maximal circuits. Nie et al. [
8] proposed an optimal configuration and arc routing problem (ARP) for sanitation vehicles operating on urban roads under multiple constraints. The physical road network was expanded into a spatio-temporal network, and the spatio-temporal trajectories of vehicles on the road network were portrayed. An optimal configuration and path planning model for sanitation vehicles was constructed, and a branch pricing algorithm was devised to effectively solve the model with precision.
This paper focuses on the path optimization problem for sanitation vehicles. At present, the research on VRP has been quite rich. It has been applied to various fields, and various VRP variants have been gradually developed, such as the capacitated vehicle routing problem (CVRP), vehicle routing problem with time window (VRPTW), green vehicle routing problem (GVRP), and multi distribution center vehicle routing problem (MDCVRP). Due to the restricted load capacity of vehicles, it is imperative to take into account capacity limitations when solving the VRP [
9,
10,
11,
12,
13,
14,
15,
16]. In the process of waste collection and transportation, in order to complete the work on time and efficiently, it is necessary to consider the constraints of the time window when optimizing the route [
17,
18,
19]. The majority of waste trucks in the city are powered by fuel. In order to mitigate the carbon emissions associated with transportation, one potential solution is to optimize the route. Jabir, Panicker, and Sridharan [
20] first to addressed the integration of carbon dioxide (CO
2) emissions into the vehicle routing problem. Their proposed model aimed to resolve the trade-off between cost and emission reduction, resulting in a substantial decrease in the total cost. Ziaei and Jabbarzadeh [
21] considered the impact of carbon emissions on a multi-modal transport network for hazardous materials. Sherif et al. [
22] incorporated the cost of carbon emissions into the objective function and built a multi-depot heterogeneous green vehicle routing optimization model for the battery supply chain network. Madden et al. [
23] built a model to estimate carbon emissions from curbside organic waste collection based on waste collection route data, which showed that curbside collection was the largest contributor to overall transport emissions. Guo, Qian, et al. [
24] proposed a three-dimensional ant colony optimization algorithm (TDACO) to solve the multi-compartment vehicle routing problem (MCVRP) in industries such as waste collection and incorporated carbon emissions into the state transition rules in the TDACO. Dayanara, Arvitrida, and Siswanto [
25] constructed a vehicle routing optimization model with the number of waste collections, time windows, and carbon emissions as constraints. Liu and Liao [
26] considered different types of vehicles working together for waste collection and built an optimization model to minimize economic costs and carbon emissions. Li et al. [
27] comprehensively considered the fixed vehicle costs, early and delayed penalty costs, fuel costs, and the impacts of vehicle speed, load, and road gradient on fuel consumption and developed a hybrid genetic algorithm solution with variable neighborhood search. Zhou, Li, and Wang [
28] took into account how vehicle load affects carbon emissions and constructed a model that they then tested for robustness to find the shortest route and reduce carbon emissions. Wang and Shan [
29] established a multi-objective waste collection model combining transport distance, fuel consumption, and carbon emission and demonstrated the effectiveness and practicality of the algorithm. Lu [
30] constructed a mathematical model with the optimization objective of minimizing economic cost and carbon emission cost to meet the low-carbon demand for waste collection and transportation. Li, Song, and Guo [
31] established a cold chain logistics multi-temperature co-distribution path optimization model consisting of transportation cost, carbon emission cost, refrigeration cost, and loss cost with the lowest total cost as the objective function to achieve low-carbon collection and transportation. Martyushev et al. [
32] studied the operational performance of electric vehicles and developed a simulation model to determine the range of an electric vehicle by cycles of movement. The effects of operating speed, drag, and mechanical forces on the operation of electric vehicles were considered in the modeling process.
Considerable research has been conducted on the mathematical models [
33] pertaining to the VRP, as well as the algorithms developed for solving it. The algorithms utilized for solving the VRP are mainly divided into two categories: exact algorithms and heuristic algorithms. The most widely used algorithm is the meta-heuristic algorithm, which mainly includes the genetic algorithm, ant colony algorithm, simulated annealing algorithm, etc. To minimize the time taken during the collection of bio-medical waste (BMW), Mohamed et al. [
34] built an optimized vehicle route model for a set of six dedicated vehicles using a particle swarm optimization (PSO) algorithm. Moazzeni, Tavana, and Mostafayi Darmian [
35] used a GA and grey wolf optimizer (GWO) to solve the dynamic location-arc routing optimization model for electric waste collection vehicles. Liu and He [
36] designed a clustering ant colony algorithm to solve the optimization of domestic waste collection and transportation routes in Chengdu. Wang [
37] formulated a multi-objective optimization model with time windows and used a particle swarm algorithm to solve it to obtain a dispatching scheme for collection vehicles under different modes. Zhao, Ma, and Liu [
38] established a mathematical model to minimize transportation costs and vehicle fixed costs and proposed an improved ant colony algorithm to obtain a suboptimal solution. Experimental results showed the correctness of the proposed model and the effectiveness and optimization ability of the algorithm.
Although scholars have made a lot of achievements, there are still some limitations that have yet to be addressed. The impact of vehicle fixed costs, transportation costs, and carbon emission costs, as well as vehicle capacity and time window constraints on transportation costs, are rarely considered. For the solution algorithm for this problem, ACO has strong robustness but still has the weakness of easily falling into a local optimum.
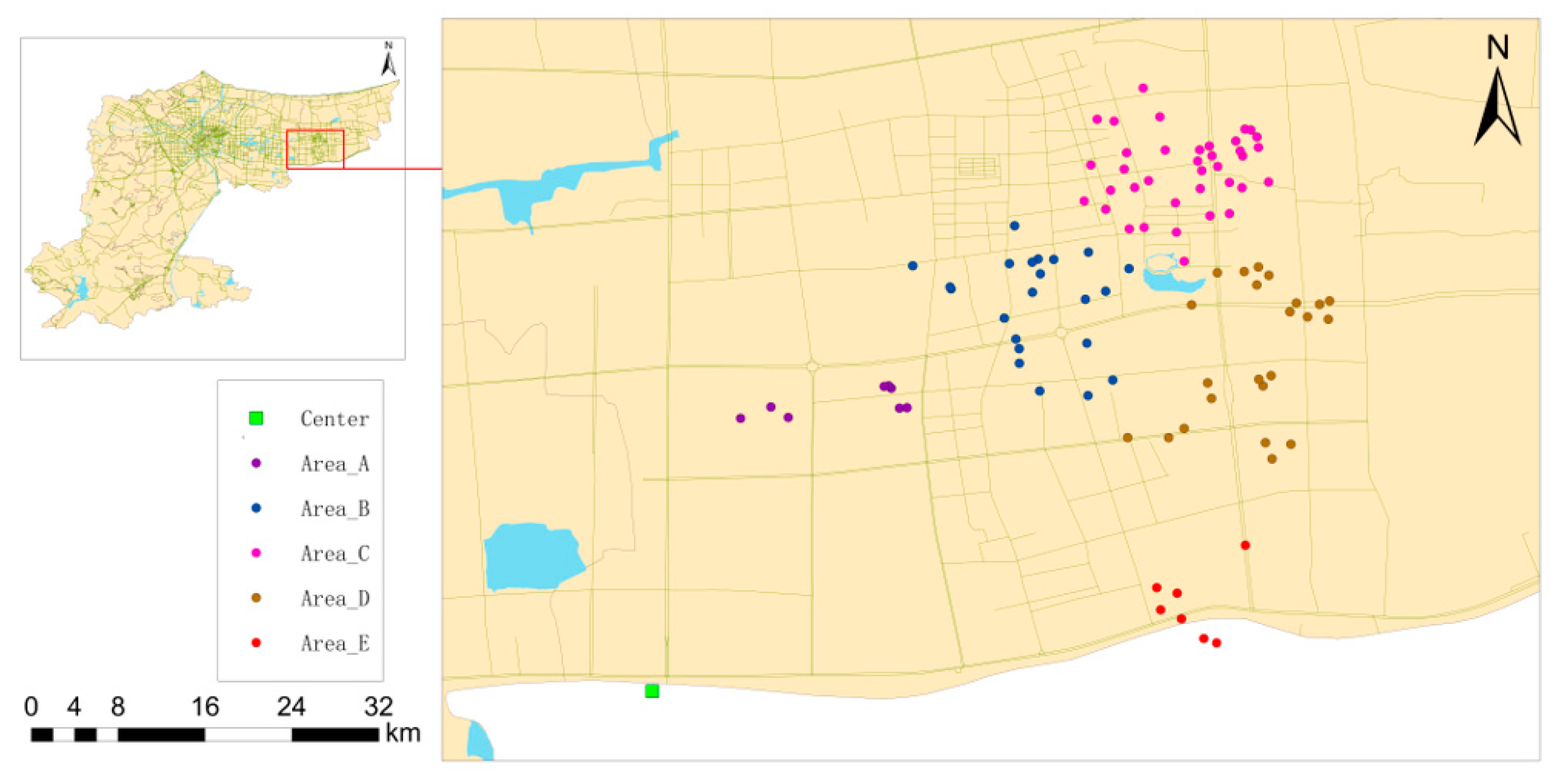
Carbon peaks and carbon neutrality have emerged as highly significant subjects of discussion in the current discourse. China boasts the largest carbon trading system, which not only facilitates the reduction of carbon emissions but also contributes to the growth of GDP. The carbon market introduces a level of flexibility to the industry, enabling companies to strategically manage their CO2 emissions in order to minimize costs. The aim of this paper is to reduce business costs and increase environmental benefits by optimizing the routes of sanitation vehicles. This study is based on real case data from Huzhou, Zhejiang, China. Firstly, the waste collection network in the study area is divided into five sub-areas by investigating the current situation of MSW collection and transportation, analyzing the distribution of waste nodes, and studying the waste generation pattern. A model is established for vehicle matching and path optimization with time window constraints and capacity constraints. An improved ant colony algorithm is designed to solve the model and compare the results with those of the other two algorithms.
The paper is structured as follows:
(1)
Section 1: Introduction. The introduction provides the background and purpose of the study and summarizes the relevant research literature in related fields.
(2)
Section 2: Model Formulation. This section introduces the research data, research questions, assumptions, and constraints and establishes a model for the matching and path optimization of MSW collection vehicles with time window constraints and capacity constraints.
(3)
Section 3: Methodology. An improved ant colony algorithm is designed to solve the mathematical model, and the steps and contents of the algorithm are discussed in detail.
(4)
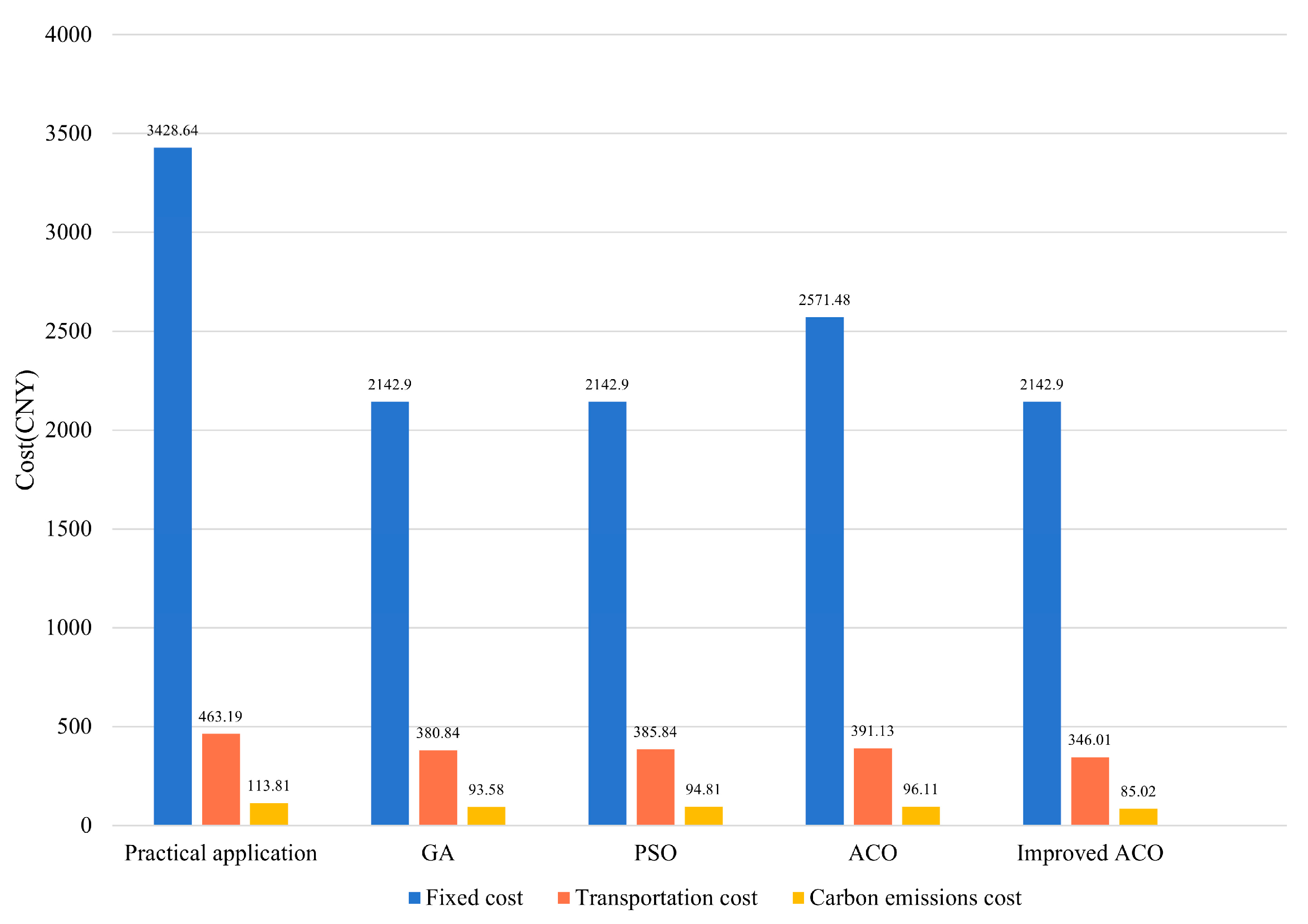
Section 4: Results. The effectiveness of the improved ACO algorithm is verified by example data. By comparing the experimental results of PSO and GA, the algorithm designed in this paper has significant superiority.
(5)
Section 5: Conclusion. This section summarizes the research findings and the progress made in this paper. It also summarizes the limitations of the research in this paper and explores the possibilities and improvement directions for future research.
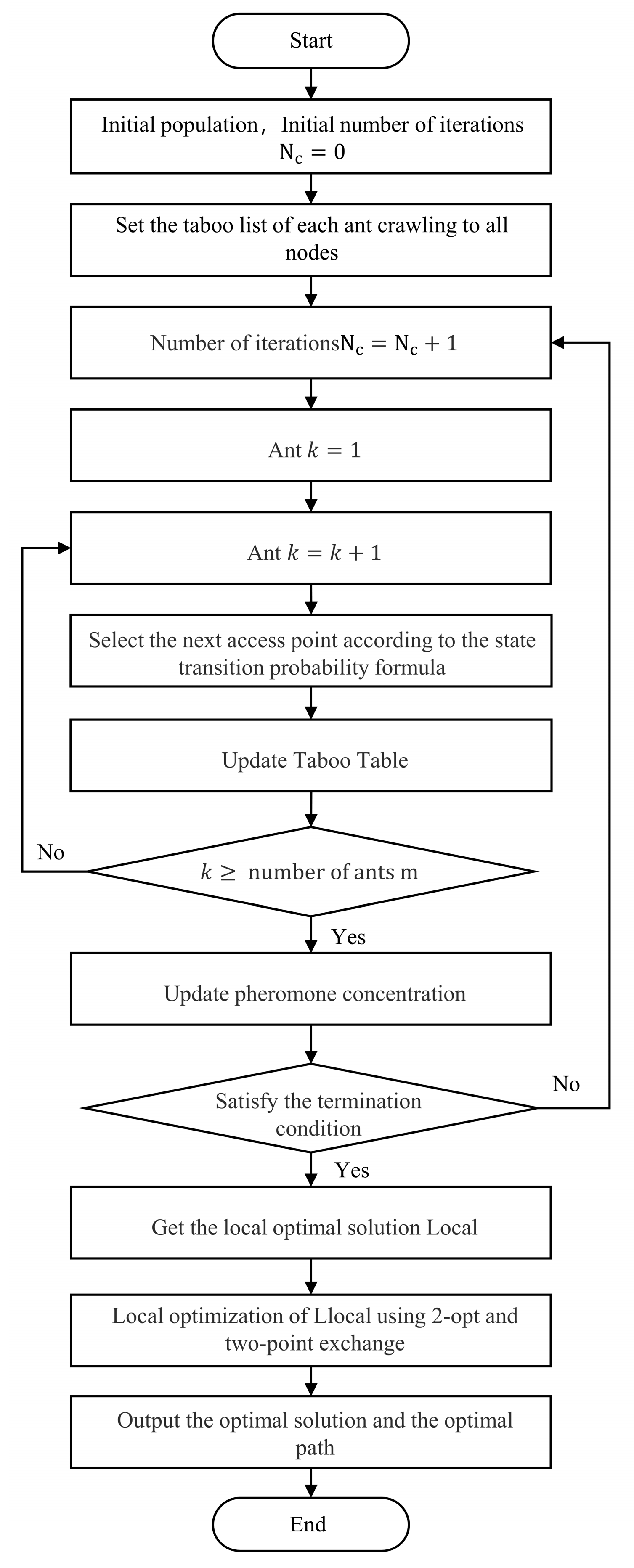
3. Methodology
An improved ant colony algorithm has been designed to assist companies in making decisions. Combining the max–min ant system and the 2-opt local search algorithm to optimize the traditional ant colony algorithm, the solution steps are shown in
Figure 2:
Step 1: Initialization of the colony.
Initialize parameters such as colony size, pheromone importance factor, heuristic function importance factor, and maximum number of iterations. Place the ants randomly on different nodes.
Step 2: Constructing the solution space.
Place individual ants in the current solution set, transfer each ant to the next node according to the probability
, add this node to the current solution set, and repeat this process several times until all ants have visited all nodes. Considering the constraints on vehicle capacity, the state transfer method for ants has been improved, as shown in Equation (13)
where
is the combination of all waste collection points;
is the pheromone concentration on path
;
and
are used for weighting the pheromone intensity and visibility;
is the vehicle weight factor;
is a random number in the interval [0,1]; and
is a fixed value in the range (0,1);
is the visibility on path
. The range of values is (0,1);
represents the visibility on path
, i.e., the degree of illumination from collection point
to
. This is shown in Equation (14):
where
is the distance from collection point
to
.
represents the load factor of the collection vehicle and is expressed as Equation (15):
where
is the amount of waste at collection point
;
Q is the vehicle load constraint.
Step 3: Updating the pheromone.
Calculate the path length
visited by each ant and save the optimal solution in the current iteration number. At the same time, update the pheromone concentration on the paths between each node by adding additional pheromone to the feasible paths as well as the optimal paths of the objective function, as shown in Equation (16)
where
denotes the pheromone volatility factor;
denotes the pheromone residual factor; when the path
is the feasible path or the path with the minimum objective function, an additional pheromone
or
is added to the path
.
Step 4: Premature convergence judgement.
Introduce the max–min ant colony algorithm to overcome the premature convergence problem, keeping the pheromone concentrations after each update within the range of
to prevent large differences in pheromone concentrations between paths. The minimum concentration of pheromones can increase the likelihood of exploring the optimal solution, while the maximum concentration of pheromones can ensure that ants benefit from past experiences. The equation for the max–min ant colony algorithm is as follows:
The clustering degree of a single ant and whether the solution tends to be smooth are used to judge whether the algorithm converges too early. For the aggregation degree of a single ant in an ant colony, the following Equation (18) is used:
where
is the variance of the colony fitness;
is the fitness of the
ith ant; and
is the average fitness of the colony. The size of
is constrained by taking constant values for
. When
, then it is considered that individuals in the population exhibit aggregation and the algorithm enters into premature convergence. To select some of the better solutions in the initial solution, optimize again; otherwise, continue with the next process.
Step 5: The 2-opt algorithm further optimizes the solution.
Use the 2-opt algorithm to address the issue of the algorithm getting stuck in local optima. The principle is to update the two edges of the exchange solution until the optimal solution is found.
Step 6: Terminating the iteration.
Determine if the maximum number of iterations has been reached and output the optimal result. If the termination condition is not met, repeat Steps 2 to 5.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}