In order to verify the performance of the proposed hydraulic PTO system and control system under real sea states, two cases of (a) wave incidence direction change and (b) significant wave height and energy period change are studied.
5.3.2. Performance of the Proposed Control System
In this section, the incident wave is an irregular wave with the significant wave height
= 2 m and the energy period
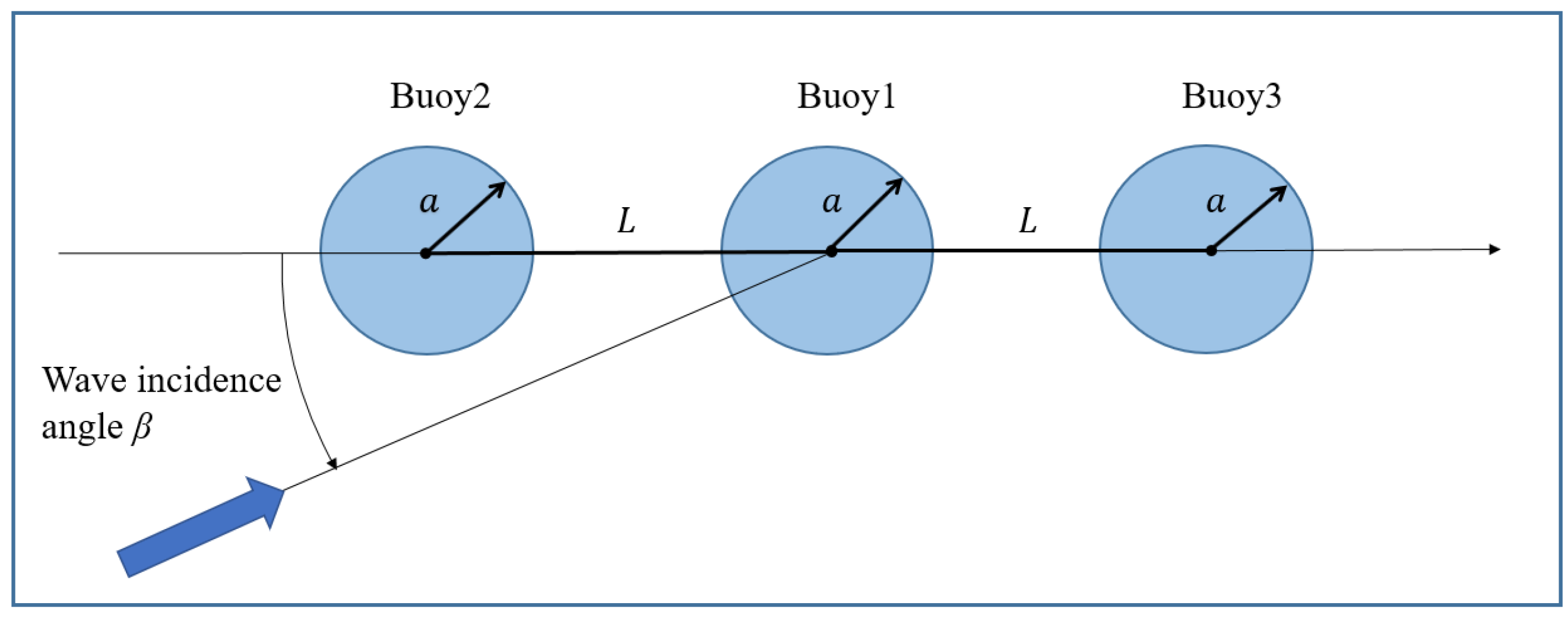
= 7 s, and the wave incidence angle
β is selected as 0, 45, and 90 degrees to simulate the change in the wave incidence direction. According to the matching table of sea states and their optimal
Cg, the optimal
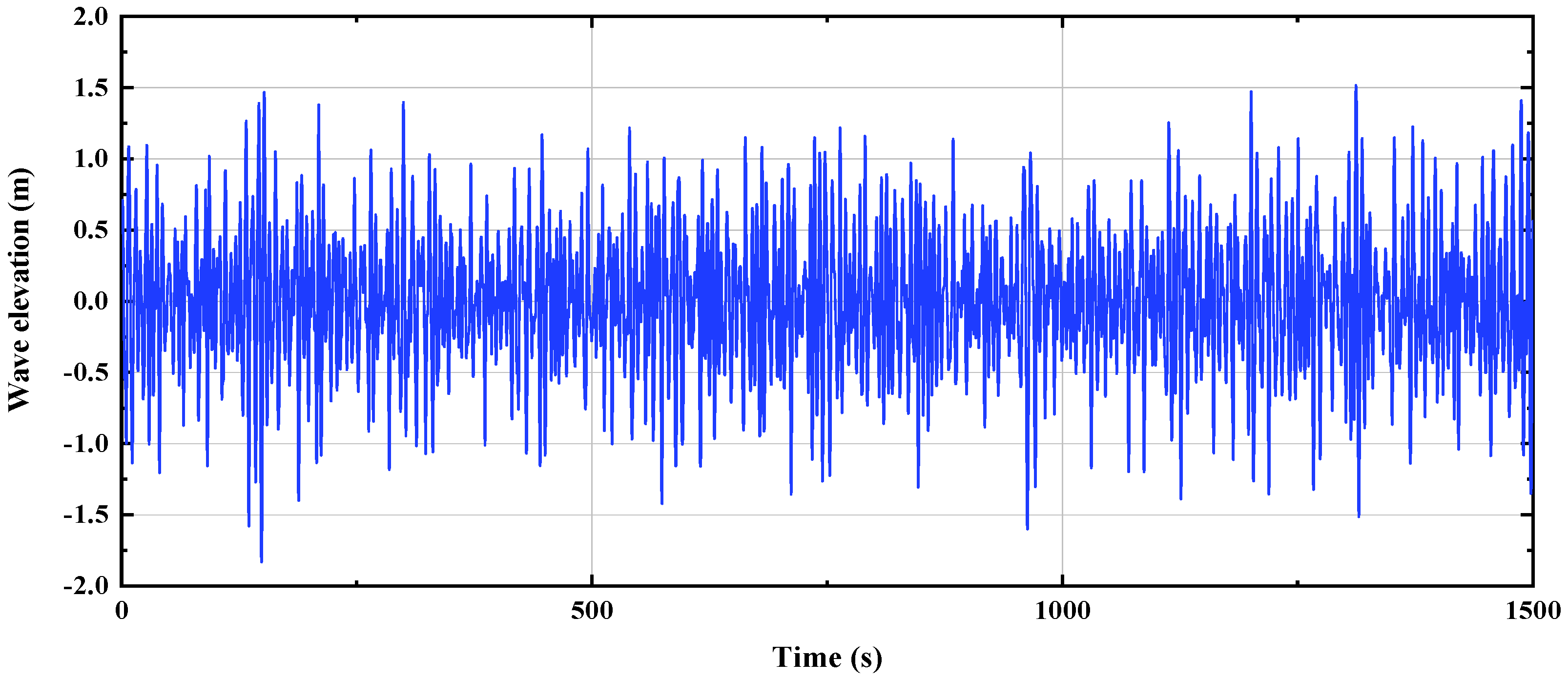
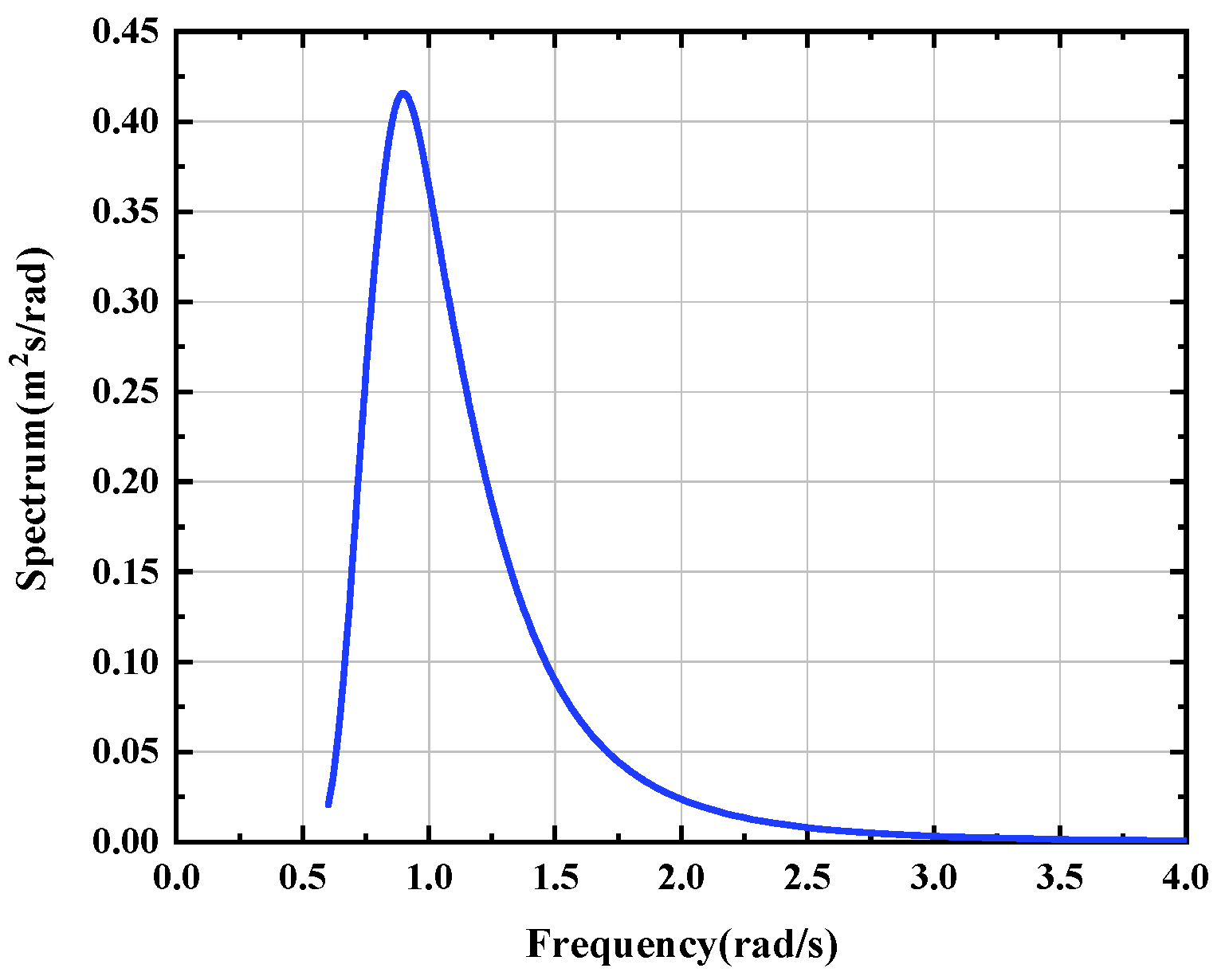
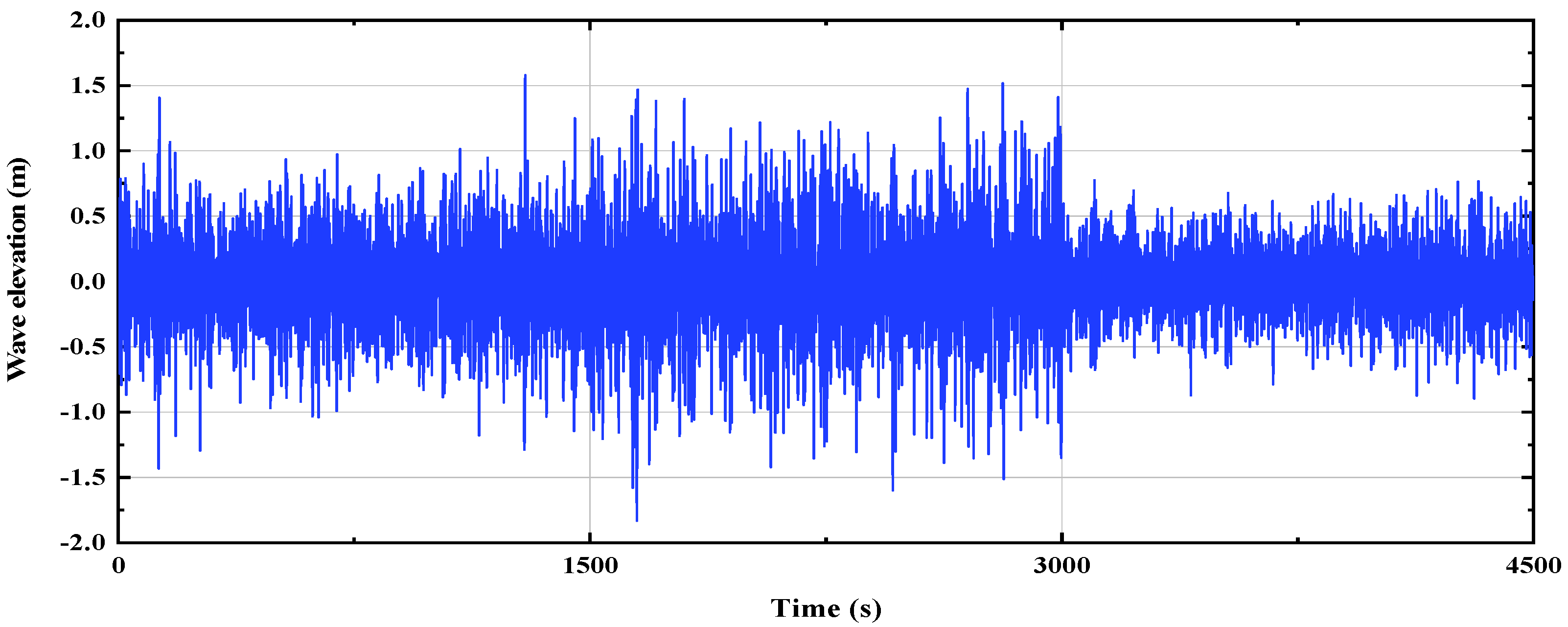
Cg for wave incidence angles of 0, 45, and 90 degrees are 45.4 N·m/(r/s), 48.5 N·m/(r/s), and 54.4 N·m/(r/s) respectively. For a given wave spectrum (JONSWAP spectrum), the time history of the irregular wave is generated by the linear superposition of harmonic wave components, and the wave elevation and the wave spectrum are shown in
Figure 13 and
Figure 14, respectively.
Table 6 shows the time average capture power without control (
, the time average capture power with control (
, and the average capture power increase rate (
γ) of the WEC array at different wave incidence angles. As can be seen in
Table 6, when wave incidence angles are 0°, 45° and 90°, the average capture power of the array buoys is increased by 10.44%, 9.78%, and 8.34%, respectively, using the proposed control system, indicating that the proposed control system improves the energy capture characteristics of the array buoys even when the wave incidence direction is changed. And the average capture power of the array buoys increases with the increase in the wave incidence angle because the shielding effect between the array buoys is smaller with an increase in the wave incidence angle in the range of 0°~90°.
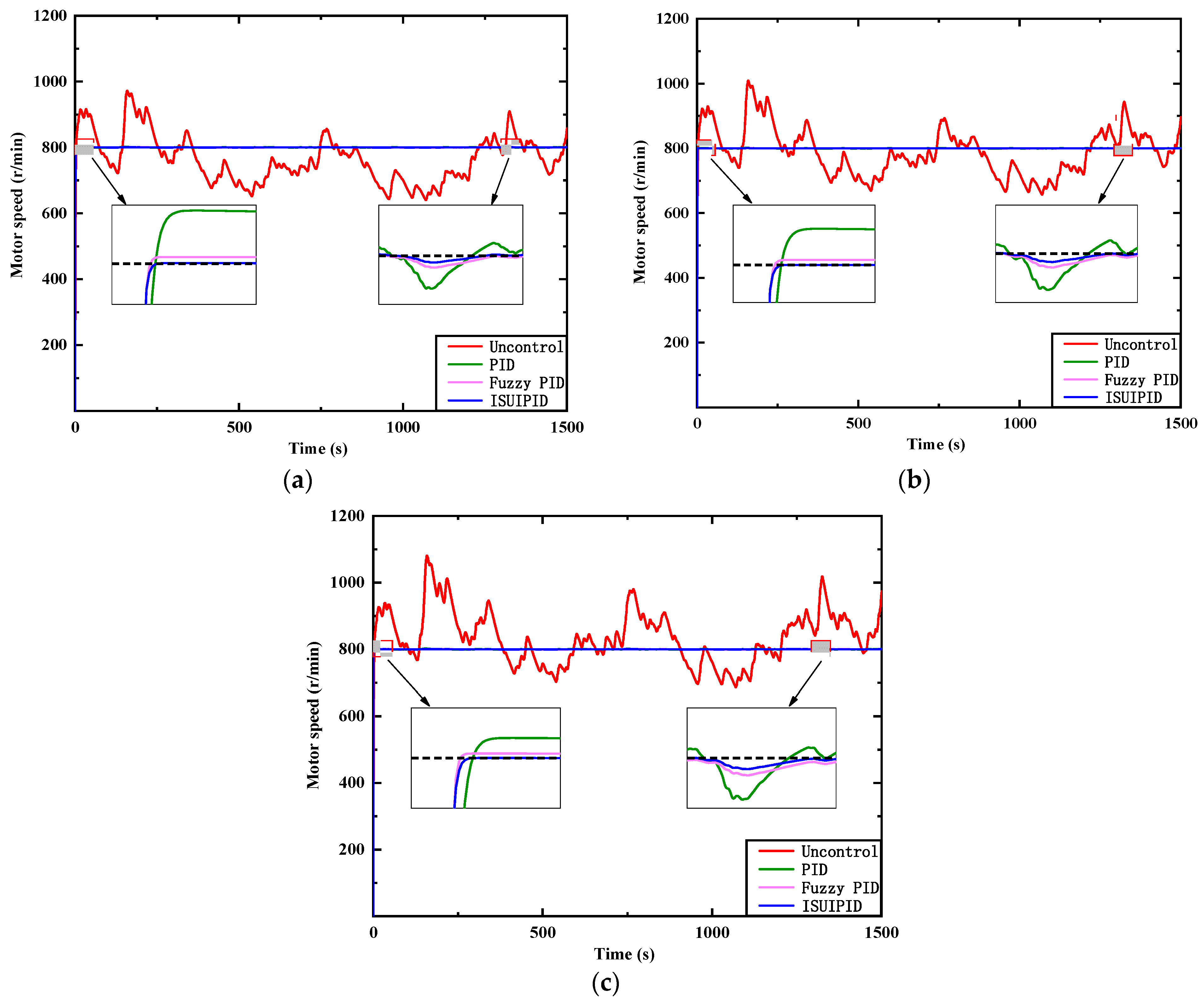
The output speeds of the hydraulic motor with the PID, the fuzzy PID, and the proposed ISUIPID controller at different wave incidence angles are shown in
Figure 15, where the black dotted line is the ideal speed curve. The simulation results show that with the proposed control system, the output speed of the hydraulic motor tracks the rated speed well despite the change in the wave incidence direction. Compared with the PID and fuzzy PID controllers, the ISUPID controller has no overshoot and less tracking error.
Table 7 shows the comparative analysis of the performance of various controllers at different wave incidence angles. The ISUIPID controller has the same rising time compared to the PID and fuzzy PID controllers. Since the initial speed of the motor is 0 and the initial tracking error is large, the hydraulic motor runs at its maximum displacement to quickly reduce the tracking error regardless of the controller. The ISUIPID controller has the best maximum absolute error and the best mean absolute error at each wave incidence angle compared to the PID and fuzzy PID controllers. When the incidence angle is 0°, 45° and 90°, the maximum absolute errors are reduced by 41.7%, 49.6%, and 50.8%, respectively, compared with the PID controller, and by 8.3%, 9.1%, and 14.5%, respectively, compared with the fuzzy PID controller. In addition, when the incidence angle is 0°, 45°, and 90°, the mean absolute errors are reduced by 79.6%, 79.0%, and 80.0%, respectively, compared with the PID controller, and by 40.0%, 38.1%, and 39.1%, respectively, compared with the fuzzy PID controller.
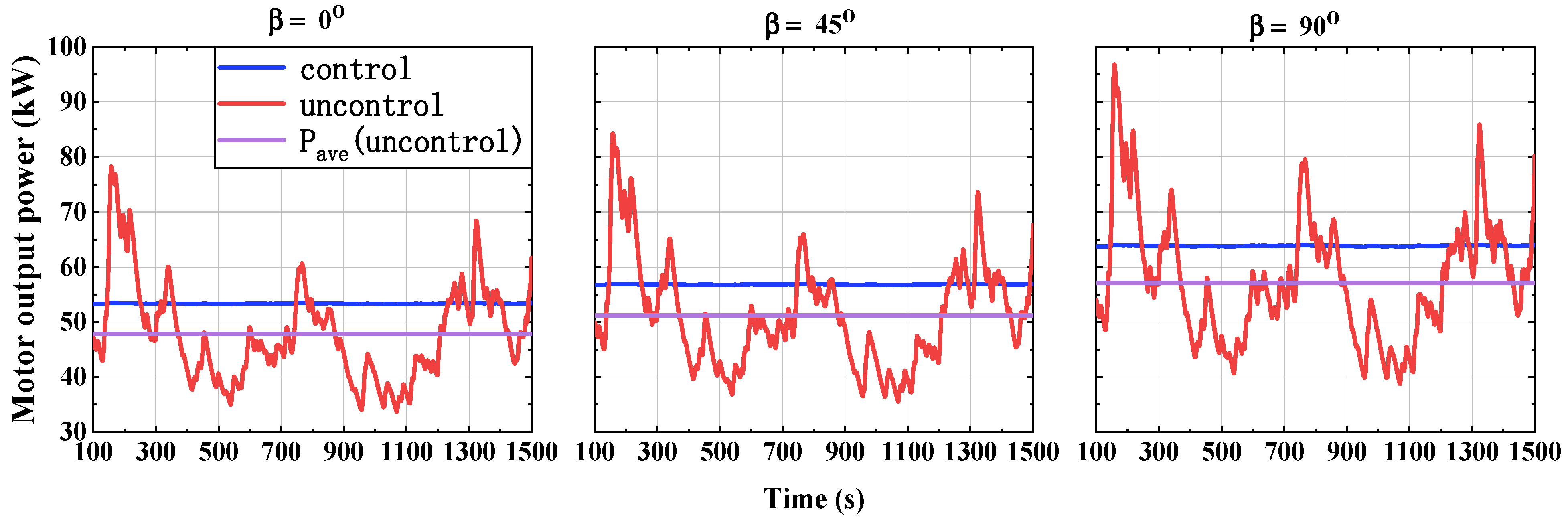
Figure 16 illustrates the output power of the hydraulic motor and
Table 8 illustrates the time average output power without control (
, the output power with control (
, and the increased rate of output power (
ζ) at different wave incidence angles. Under the proposed control system, the output power of the hydraulic motor is stable at each wave incidence angle, and the output power increases by 11.57%, 10.98%, and 11.75% when the wave incidence angles are 0°, 45°, and 90°, respectively, which demonstrates that the proposed control system can significantly increase and stabilize the output power of the WEC arrays even under sea conditions with large variations in wave direction.
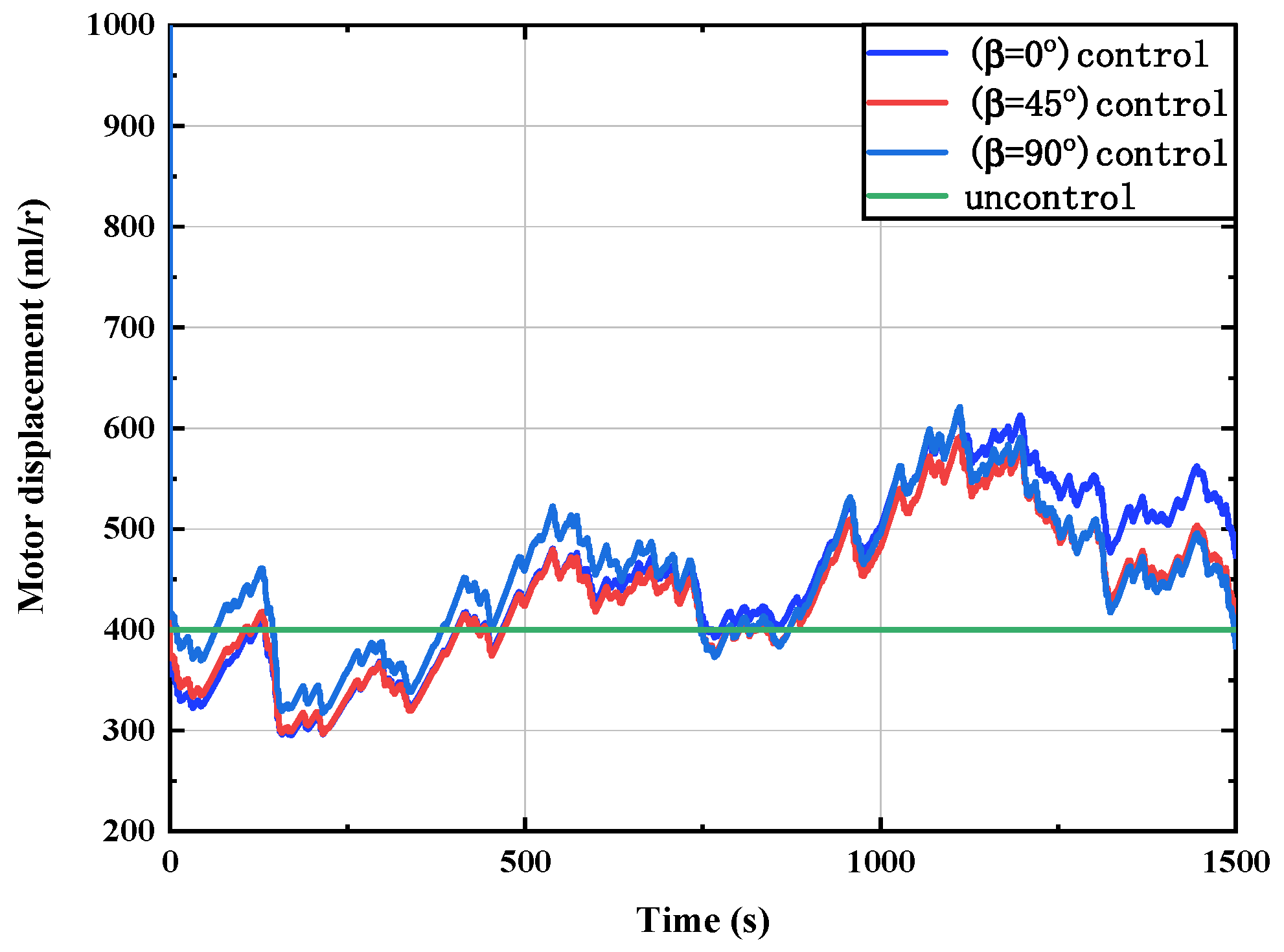
Figure 17 presents the displacement of the hydraulic motor with and without control at different wave incidence angles. As can be seen in
Figure 17, the displacement of the hydraulic motor changes constantly to meet the ideal speed under the irregular incident wave. Since the initial speed of the hydraulic motor is 0 r/min, the motor displacement reaches the upper limit in the initial stage in order to rapidly reduce the large speed error in the initial stage. After the speed is stable, the hydraulic motor displacement fluctuates between 280 mL/r and 630 mL/r, which is in accordance with the actual operating requirements of the hydraulic motor.
- 2.
Significant wave height and energy period change.
In this section, the incident wave is an irregular wave composed of the following three wave states: (a)
= 1.5 m and
= 6 s; (b)
= 2 m and
= 7 s; (c)
= 1 m and
= 5 s. The operating time of each wave state is 1500 s, and the wave incidence angle is selected as 90°. Based on the matching table of sea states and their optimal
Cg, the optimal
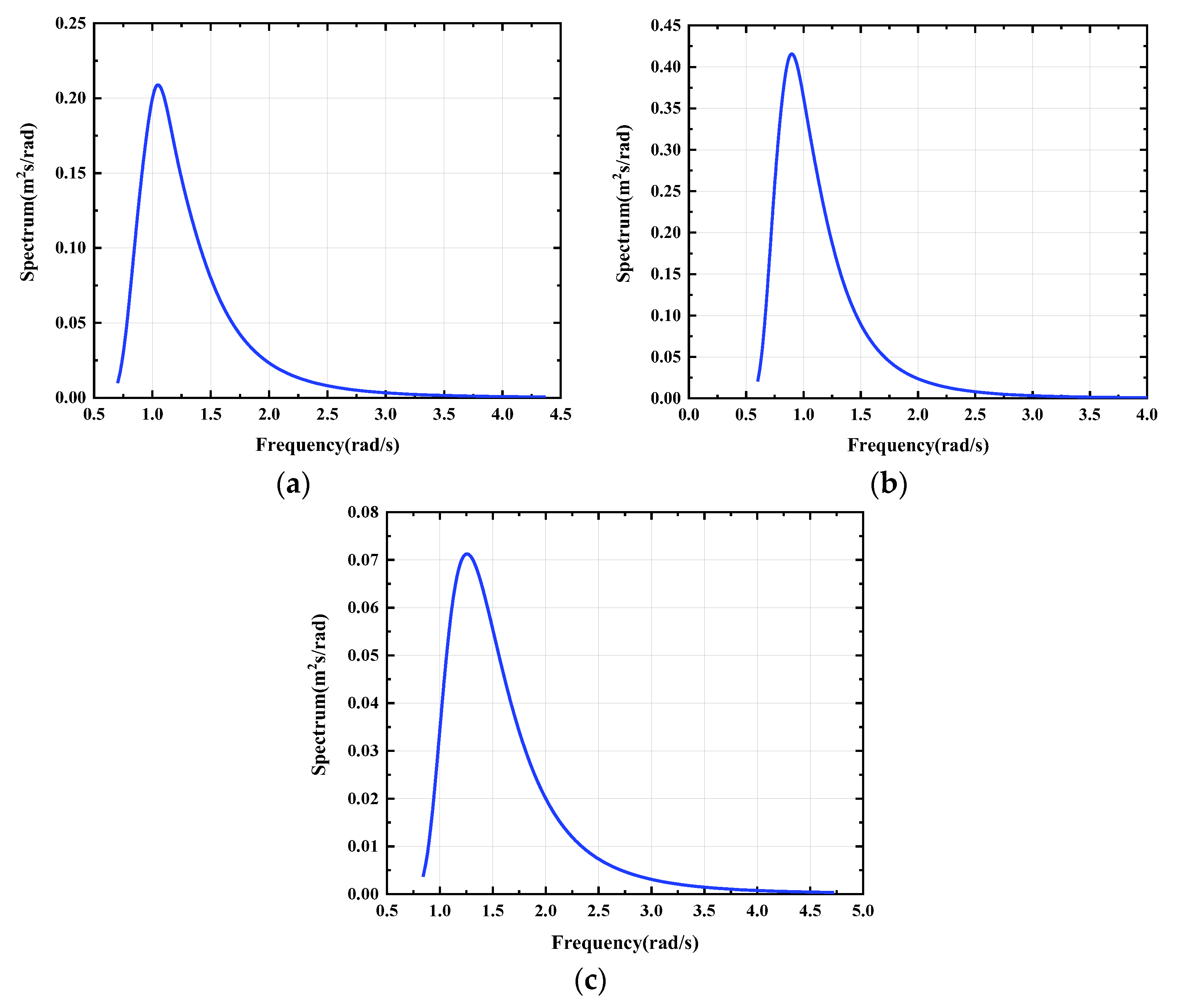
Cg for the above three wave states are 35.2 N·m/(r/s), 54.4 N·m/(r/s), and 19.8 N·m/(r/s), respectively. Then, the wave elevation and the wave spectra of the above wave state are shown in
Figure 18 and
Figure 19, respectively.
Table 9 displays the time average capture power without control (
), the time average capture power with control (
), and the average capture power increase rate (
γ) at different significant wave heights and energy periods. As shown, the average capture power of the array buoys is increased by 27.37%, 8.34%, and 41.83% using the proposed control system for the three wave states mentioned above, respectively, which indicates that the proposed control system is able to significantly improve the capture power of the arrayed buoys under various wave states, and the smaller the wave states are, the more obvious the enhancement effect is.
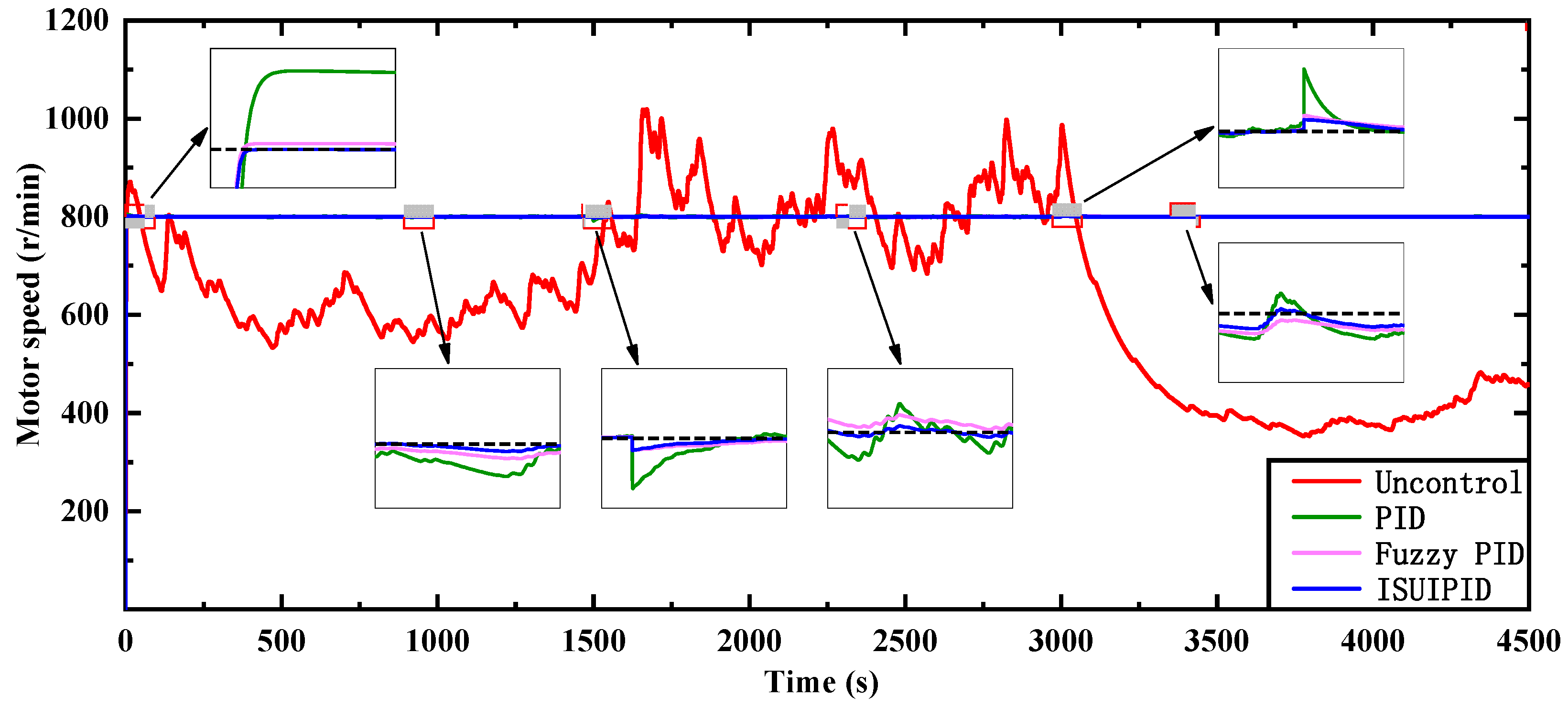
As shown in
Figure 20, the output speed of the hydraulic motor has a good tracking effect under the action of the control system, which indicates that the proposed control system has excellent performance and strong robustness when the wave state changes. And compared with the PID and fuzzy PID controllers, the ISUPID controller has less overshoot during wave state change and less tracking error during the whole operation. The comparative analysis of the performance of various controllers at different wave states is shown in
Table 10. The ISUIPID controller has the best maximum absolute error and the best mean absolute error throughout the operation as compared to the PID and fuzzy PID controllers. The maximum absolute error and the mean absolute error are reduced by 62.1%, and 75.0%, respectively, compared with the PID controller. And compared to the fuzzy PID controller, the maximum absolute error and the mean absolute error are reduced by 36.3% and 36.4%, respectively.
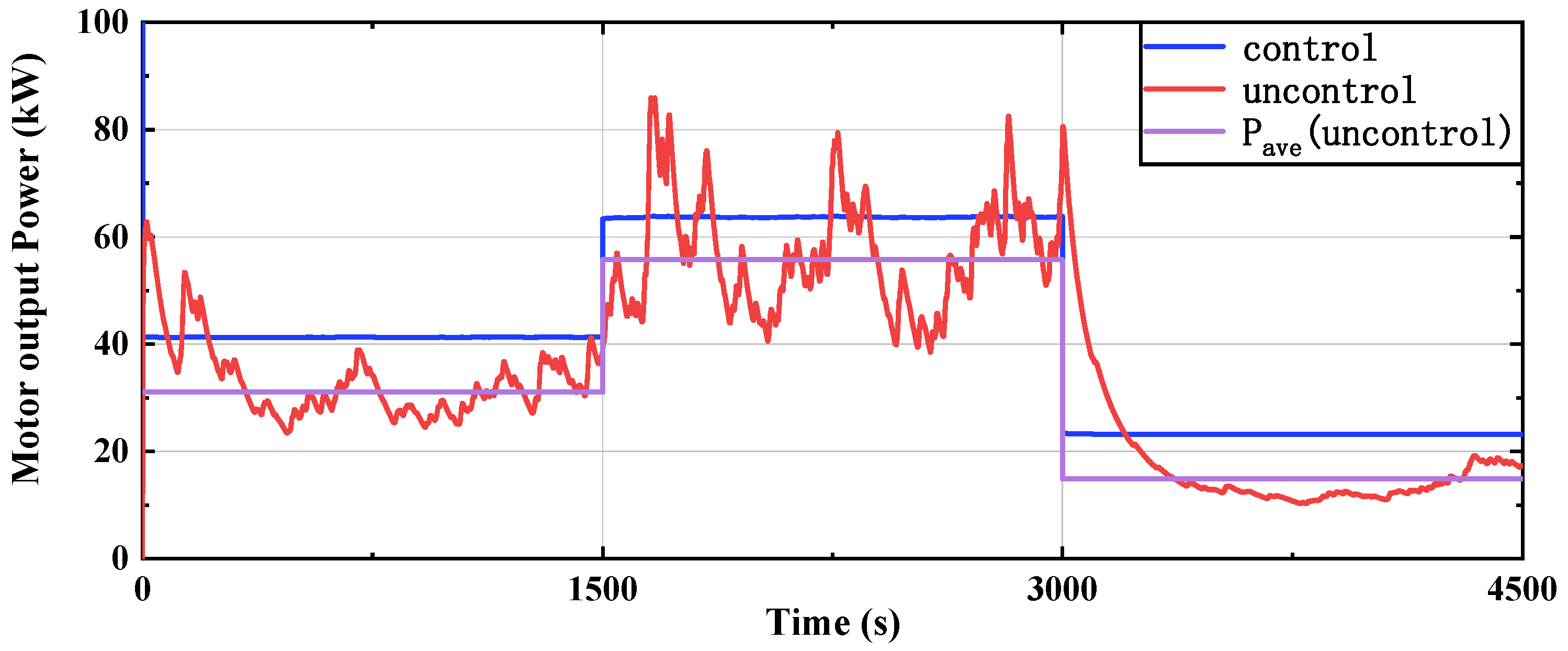
The output power of the hydraulic motor with and without control at different wave states is illustrated in
Figure 21, and
Table 11 shows the time average output power without control (
), the output power with control (
), and the increased rate of output power (
ζ) at different wave incidence angles. It can be seen that the output power of the hydraulic motor is increased by 32.62%, 11.75%, and 55.91%, respectively, in these three wave states, and the power can be output stably in each wave state. This indicates that the proposed control system has a significant effect on improving the energy capture power of the array buoys as well as enhancing and stabilizing the output power of the array of PA-WECs, and the smaller the waves, the more obvious the improvement effect.
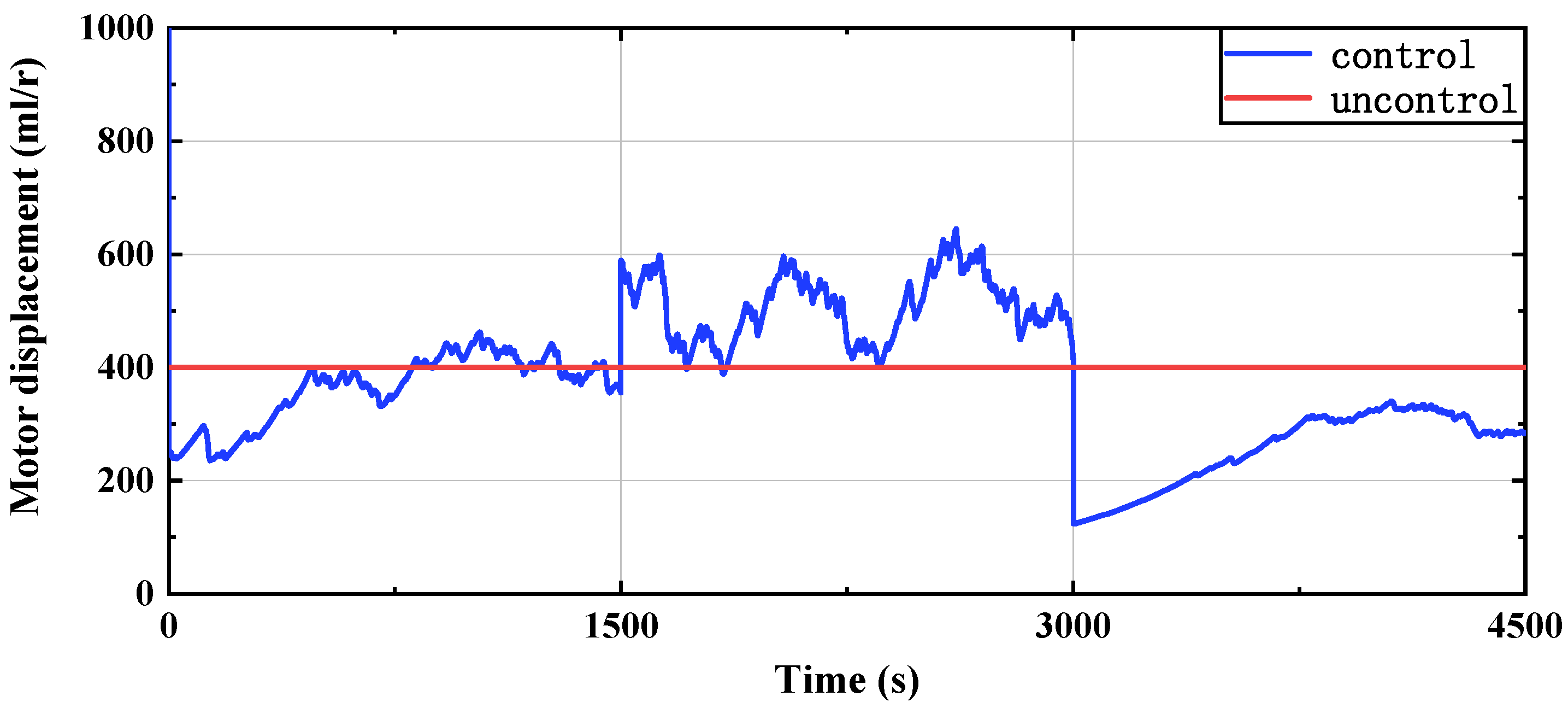
The displacement of the hydraulic motor with and without control at different wave states is shown in
Figure 22. In order to track the rated speed of the hydraulic motor under the irregular incident wave, the displacement of the hydraulic motor varies continuously between 90 mL/r and 790 mL/r. The displacement of the hydraulic motor changes abruptly when the wave state changes and fluctuates within a relatively small range after the wave state stabilizes. This is because the change in wave state means that there is an abrupt change in the input to the WEC array, and the control system needs to quickly adjust the displacement of the hydraulic motor in order to keep the hydraulic motor running at the desired speed.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}