Influence of Psychological and Socioeconomic Factors on Purchase Likelihood for Autonomous Vehicles: A Hybrid Choice Modeling Approach




Abstract
:1. Introduction
2. Literature Review
2.1. Impact of Socioeconomic Factors on Purchase Likelihood for AVs
2.2. Impact of Psychological Factors on Purchase Likelihood for AVs
2.3. Contributions
3. Methods
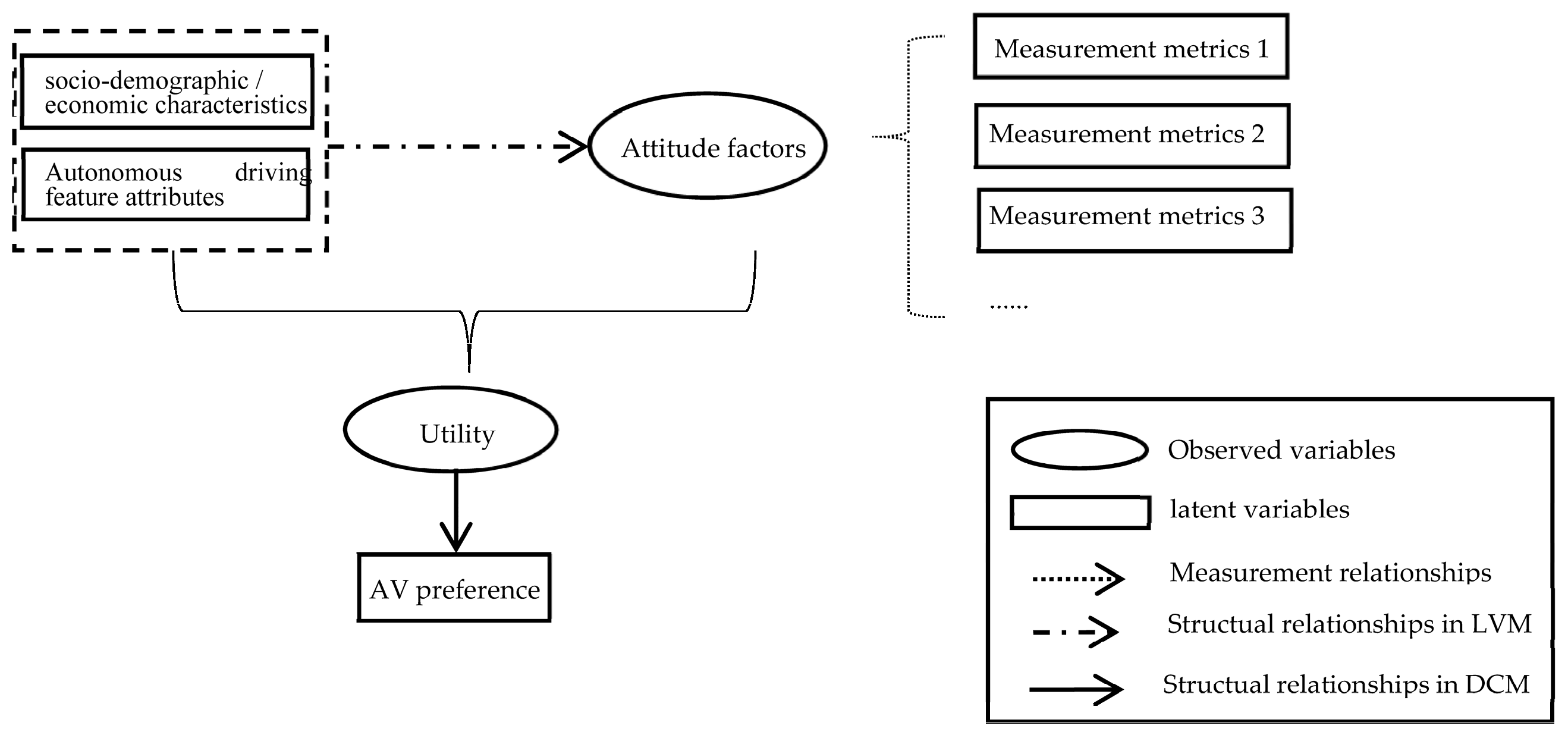
3.1. Modeling Framework
3.2. Hybrid Choice Model
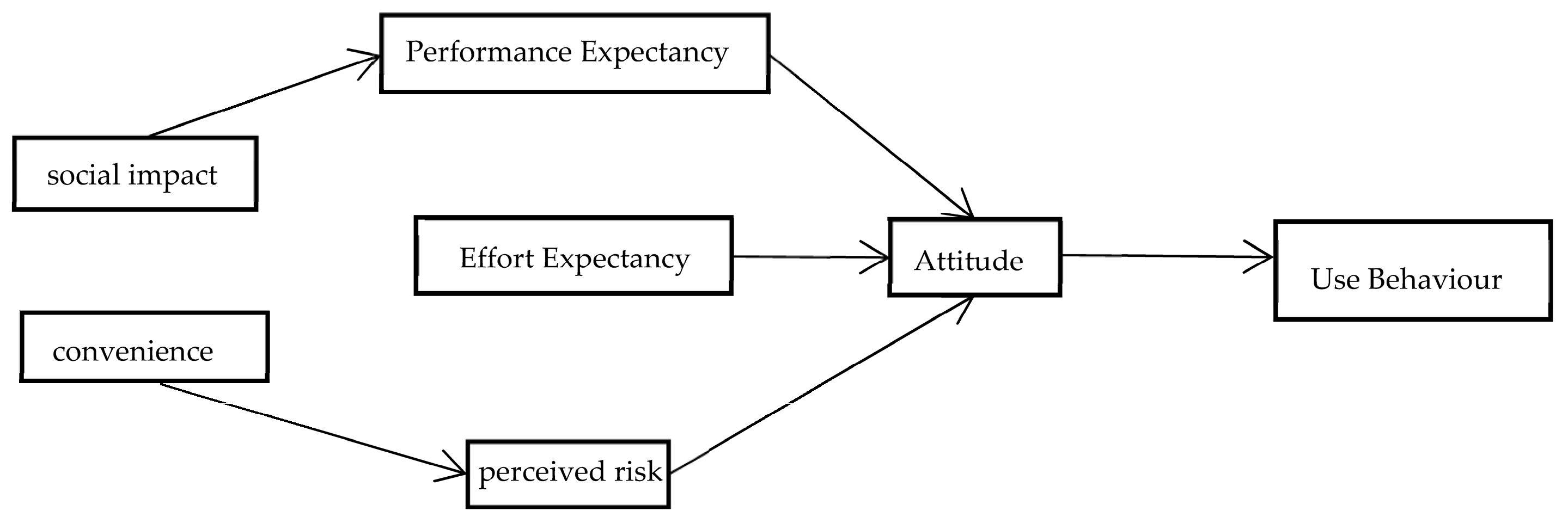
3.2.1. Structural Equation
3.2.2. Mixed Logit Model
3.2.3. Model Calibration
4. Survey Design
4.1. Research Subjects
4.2. Instrument Development
4.3. The Design of the Questionnaire Scales
- Basic Information about the Travelers: this includes sociodemographic and economic characteristics.
- Perceptions and Acceptance of Autonomous Vehicles: this section features latent variable measurement surveys regarding attitudes toward autonomous driving technology. To formulate questions about participants’ attitudes, the previous literature is referenced. Attitudinal questions are framed using a 5-point Likert scale (1 = strongly disagree, 5 = strongly agree).
- In addition to the multiple-choice questionnaire, the survey also employed a Stated Preference (SP) choice experiment, asking participants to hypothetically consider that they were preparing to purchase a new car. Thus, the choice scenarios were designed based on participants’ responses to different car scenarios. When participants encountered the choice experiment, they were asked to select the type of vehicle they would most prefer to purchase from options that included traditional cars and different levels of autonomous vehicles. Participants considered multiple attributes of each mode, including market share, car price, dedicated lane availability, safety record (accident rate per thousand kilometers), and traffic efficiency (time savings in daily commuting).
4.4. Survey on Individual Socioeconomic Attributes
4.5. Survey on Latent Variable Measurements
4.6. Questionnaire of AV Acceptance Survey
4.6.1. Sample Size
4.6.2. Sampling Method
5. Results for the Analysis
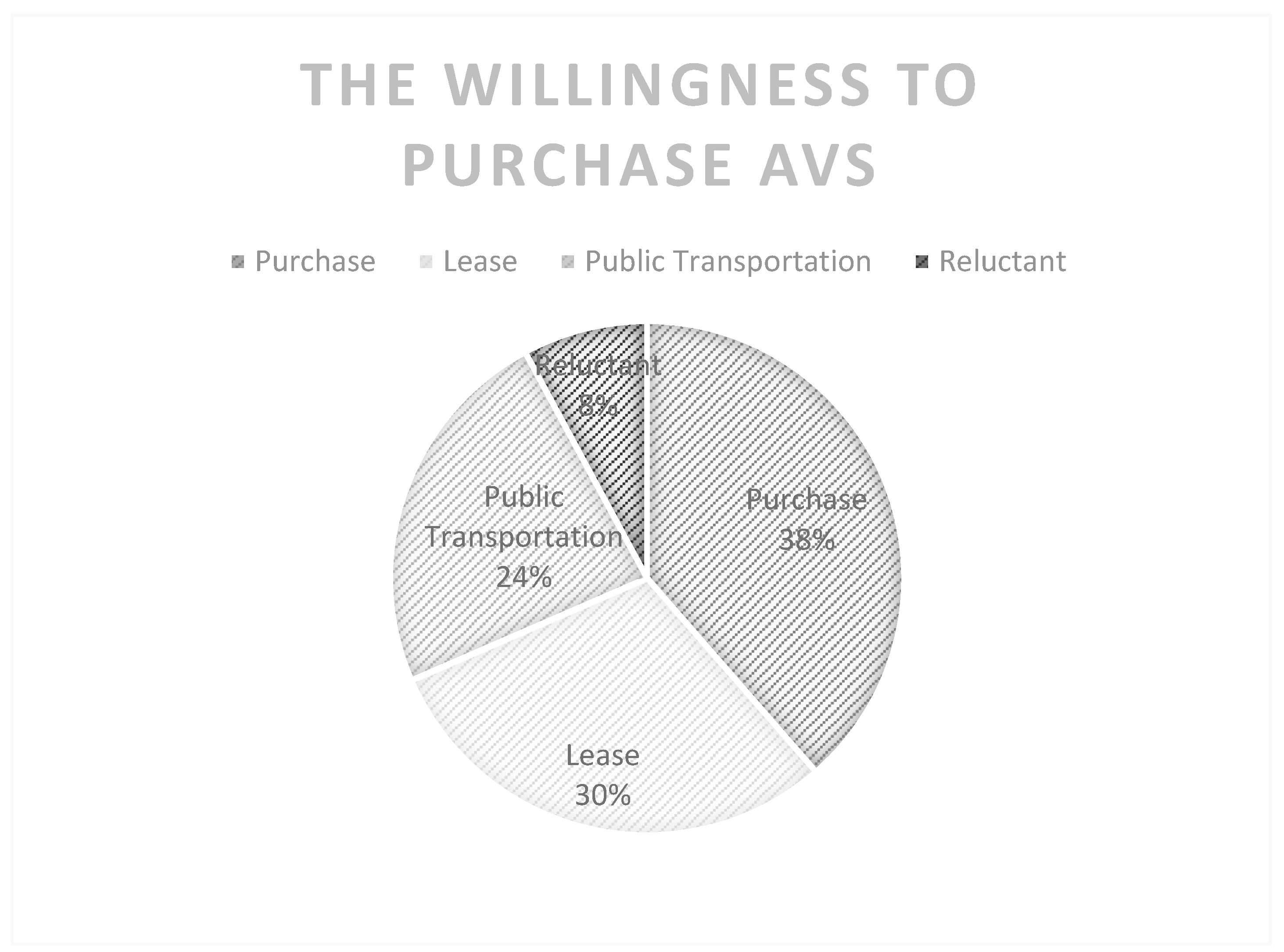
5.1. Statistical Description of the Data
5.2. Mean and Standard Deviation of Latent Variables
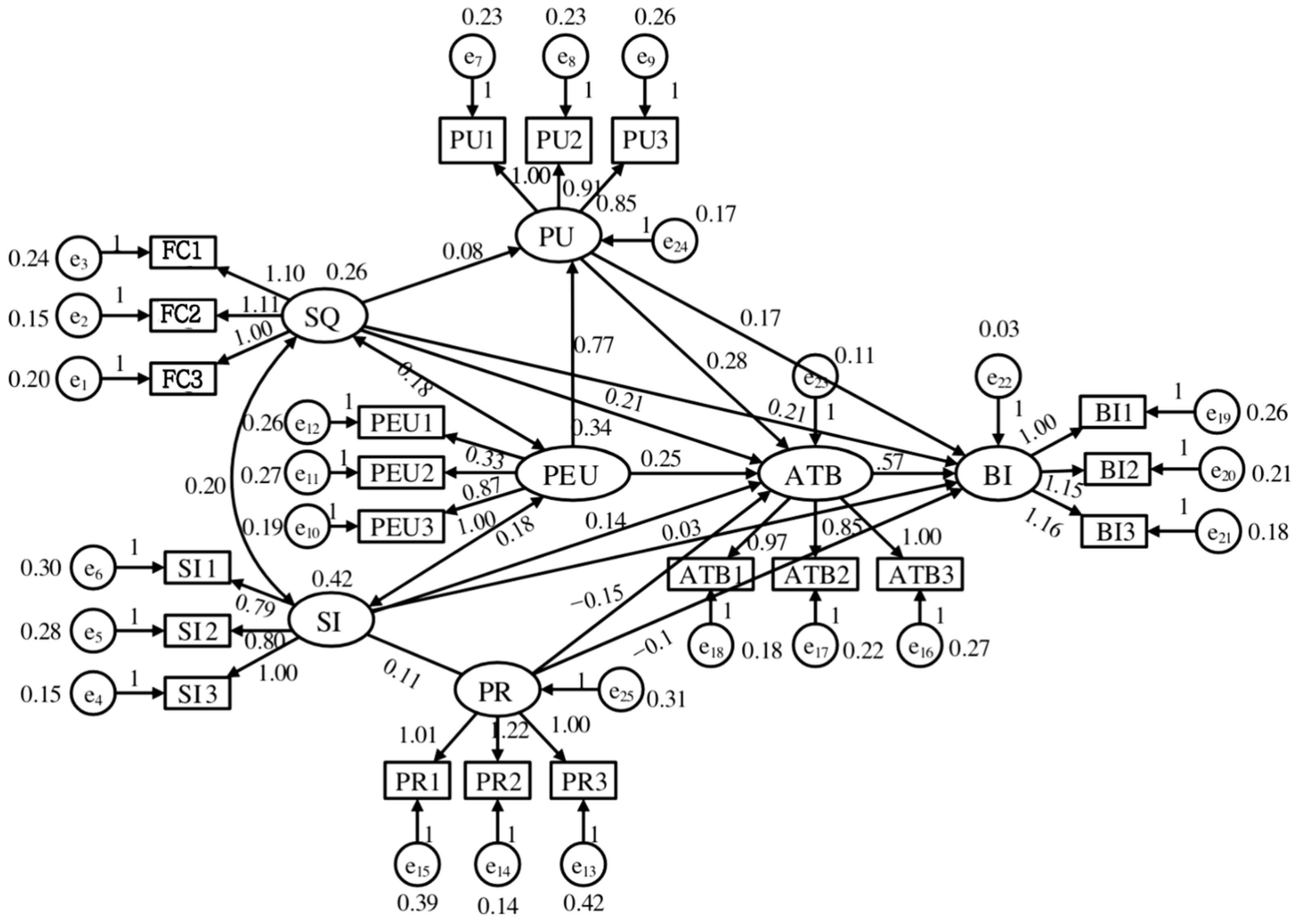
5.3. Structural Equation Modeling and Hypothesis Testing
5.4. Results of Model Calibration
5.5. Elasticity Analysis
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SAE. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 18 January 2021).
- Pettigrew, S.; Dana, L.M.; Norman, R. Clusters of potential autonomous vehicles users according to propensity to use individual versus shared vehicles. Transp. Policy 2019, 76, 13–20. [Google Scholar] [CrossRef]
- Analysys. May 2018 Analysis of China’s Internet Car Time-Sharing Rental Market [EB/OL]. Available online: https://www.useit.com.cn/thread-21044-1-1.html (accessed on 6 May 2018).
- Analysys & GoFun. November 2018 White Paper on China’s Car Time-Sharing Rental [EB/OL]. Available online: https://www.useit.com.cn/thread-21044-1-1.html (accessed on 9 November 2018).
- Luo, C.; He, M.; Xing, C. Public acceptance of autonomous vehicles in China. Int. J. Hum.-Comput. Interact. 2022, 1–12. [Google Scholar] [CrossRef]
- Kaltenhäuser, B.; Werdich, K.; Dandl, F.; Bogenberger, K. Market development of autonomous driving in Germany. Transp. Res. Part A Policy Pract. 2020, 132, 882–910. [Google Scholar] [CrossRef]
- Aoyama, Y.; Leon, L.F.A. Urban governance and autonomous vehicles. Cities 2021, 119, 103410. [Google Scholar] [CrossRef]
- Shariff, A.; Bonnefon, J.-F.; Rahwan, I. Psychological roadblocks to the adoption of self-driving vehicles. Nat. Hum. Behav. 2017, 1, 694–696. [Google Scholar] [CrossRef] [PubMed]
- Clark, B.; Parkhurst, G.; Ricci, M. Understanding the Socioeconomic Adoption Scenarios for Autonomous Vehicles: A Literature Review; University of the West of England: Bristol, UK, 2016. [Google Scholar]
- Keoleian, G.A.; Kim, S.H.; Kamat, M. Life cycle analysis of greenhouse gas emissions from plug-in hybrid vehicles: Implications for policy. Environ. Sci. Technol. 2015, 49, 2502–2510. [Google Scholar]
- Garrow, L.A.; Haigney, D.N. An investigation of consumers’ willingness to adopt self-driving vehicles. J. Transp. Geogr. 2015, 47, 78–88. [Google Scholar]
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2017, 46, 35–50. [Google Scholar] [CrossRef]
- Nazari, F.; Noruzoliaee, M.; Mohammadian, A.K. Shared versus private mobility: Modeling public interest in autonomous vehicles accounting for latent attitudes. Transp. Res. Part C Emerg. Technol. 2018, 97, 456–477. [Google Scholar] [CrossRef]
- Le Vine, S.; Zolfaghari, A.; Polak, J. Autonomous cars: The tension between occupant experience and intersection capacity. Transp. Res. Part C Emerg. Technol. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User Preferences Regarding Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Gurumurthy, K.M.; Kockelman, K.M. Modeling Americans’ autonomous vehicle preferences: A focus on dynamic ride-sharing, privacy & long-distance mode choices. Technol. Forecast. Soc. Chang. 2020, 150, 119792. [Google Scholar]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Webb, J.; Wilson, C.; Kularatne, T. Will people accept shared autonomous electric vehicles? A survey before and after receipt of the costs and benefits. Econ. Anal. Policy 2019, 61, 118–135. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Rahman, M.M.; Thill, J.-C. What Drives People’s Willingness to Adopt Autonomous Vehicles? A Review of Internal and External Factors. Sustainability 2023, 15, 11541. [Google Scholar] [CrossRef]
- Hwang, J.; Kim, S. Autonomous vehicle transportation service for people with disabilities: Policy recommendations based on the evidence from hybrid choice model. J. Transp. Geogr. 2023, 106, 103499. [Google Scholar] [CrossRef]
- Xiao, J.; Goulias, K.G. Perceived usefulness and intentions to adopt autonomous vehicles. Transp. Res. Part A Policy Pract. 2022, 161, 170–185. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Merat, N.; Louw, T.; Madigan, R.; Wilbrink, M.; Jamson, A.H.; Reed, N.; Lai, F.C. How do drivers of different ages respond to system failures of a partially automated driving system? Ergonomics 2014, 57, 346–360. [Google Scholar]
- Hensher, D.A.; Greene, W.H. The mixed logit model: The state of practice. Transportation 2003, 30, 133–176. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Morikawa, T. Estimation of travel demand models from multiple data sources. In Proceedings of the 11th International Symposium on Transportation and Traffic Theory, Yokohama, Japan, 18–20 July 1990. [Google Scholar]
- Idris, A.O.; Habib, K.M.N.; Shalaby, A. An investigation on the performances of mode shift models in transit ridership forecasting. Transp. Res. Part A Policy Pract. 2015, 78, 551–565. [Google Scholar] [CrossRef]
- Luce, R.D. Individual Choice Behavior: A Theoretical Analysis; Courier Corporation: North Chelmsford, MA, USA, 1959. [Google Scholar]
- Ghasri, M.; Vij, A. The potential impact of media commentary and social influence on consumer preferences for driverless cars. Transp. Res. Part C Emerg. Technol. 2021, 127, 103132. [Google Scholar] [CrossRef]
- Ullman, J.B.; Bentler, P.M. Structural equation modeling. In Handbook of Psychology, 2nd ed.; Wiley: Hoboken, NJ, USA, 2012; Volume 2. [Google Scholar]
- Kupek, E. Beyond logistic regression: Structural equations modelling for binary variables and its application to investigating unobserved confounders. BMC Med. Res. Methodol. 2006, 6, 13. [Google Scholar] [CrossRef]
- Namgung, H.; Chikaraishi, M.; Fujiwara, A. Influence of real and video-based experiences on stated acceptance of connected public transportation and autonomous vehicles in a transit mall: A hybrid choice modeling approach. Transp. Res. Part A Policy Pract. 2023, 173, 103695. [Google Scholar] [CrossRef]
- Behnood, A.; Haghani, M.; Golafshani, E.M. Determinants of purchase likelihood for partially and fully automated vehicles: Insights from mixed logit model with heterogeneity in means and variances. Transp. Res. Part A Policy Pract. 2022, 159, 119–139. [Google Scholar] [CrossRef]
- Lovreglio, R.; Fonzone, A.; Dell’olio, L. A mixed logit model for predicting exit choice during building evacuations. Transp. Res. Part A Policy Pract. 2016, 92, 59–75. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Malatji, W.R.; Van Eck, R.; Zuva, T. Understanding the usage, modifications, limitations and criticisms of technology acceptance model (TAM). Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 113–117. [Google Scholar] [CrossRef]
- de Luca, S.; Di Pace, R. Modelling users’ behaviour in inter-urban carsharing program: A stated preference approach. Transp. Res. Part A Policy Pract. 2015, 71, 59–76. [Google Scholar] [CrossRef]
- Bhat, C.R.; Castelar, S. A unified mixed logit framework for modeling revealed and stated preferences: Formulation and application to congestion pricing analysis in the San Francisco Bay area. Transp. Res. Part B Methodol. 2002, 36, 593–616. [Google Scholar] [CrossRef]
- Rose, J.M.; Bliemer, M.C.J. Sample size requirements for stated choice experiments. Transportation 2013, 40, 1021–1041. [Google Scholar] [CrossRef]
- Noy, I.Y.; Shinar, D.; Horrey, W.J. Automated driving: Safety blind spots. Saf. Sci. 2018, 102, 68–78. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Nordhoff, S.; van Arem, B.; Happee, R. Conceptual model to explain, predict, and improve user acceptance of driverless podlike vehicles. Transp. Res. Rec. 2016, 2602, 60–67. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Sample Classification |
|---|---|
| Gender | Male |
| Female | |
| Age | Under 18 years old |
| 19–25 years old | |
| 26–30 years old | |
| 31–40 years old | |
| Over 40 years old | |
| Education level or educational attainment | High school or below |
| College diploma | |
| Bachelor’s degree | |
| Master’s degree or below | |
| Income | <5000 |
| 5000–1 W | |
| 1–2 W | |
| 2–3 W | |
| 3–5 W | |
| >5 W | |
| Number of vehicles owned | 0 |
| 1 | |
| 2 | |
| 3 or more vehicles | |
| Actual driving experience | No driver’s license or licensed but no actual driving experience |
| 0–1 year of driving experience | |
| 1–3 years of driving experience | |
| More than 3 years of driving experience |
| L3 Autonomous Driving Car | L4 Autonomous Driving Car | L5 Autonomous Driving Car | |
|---|---|---|---|
| AV market share | 10%, 20%, 30% | 5%, 10%, 20% | 1%, 5%, 10% |
| Ex-factory price | 25, 27, 29 | 27, 30, 33 | 30, 35, 40 |
| AV purchase subsidy | 1, 2, 3 | 2, 3.5, 5 | 3, 6, 9 |
| AV usage scenarios | Partially autonomous driving on large multi-lane highways | Fully autonomous driving on large multi-lane highways | All sections |
| AV Market Share | Ex-Factory Price | AV Purchase Subsidy | Final Price | AV Usage Scenarios | |
|---|---|---|---|---|---|
| A. Conventional car | |||||
| B. L3 autonomous driving car | 20% | 25 | 2 | 23 | Partially autonomous driving on large multi-lane highways |
| C. L4 autonomous driving car | 10% | 33 | 3.5 | 29.5 | Fully autonomous driving on large multi-lane highways |
| D. L5 autonomous driving car | 5% | 35 | 3 | 32 | All sections |
| Age | Ratio |
|---|---|
| [18, 25) | 25.1% |
| [25, 35) | 53.3% |
| [35, 45) | 18.5% |
| 45+ | 3.1% |
| Category | Sample Classification | Sample Size | Proportion or Ratio (%) |
|---|---|---|---|
| Gender | Male | 146 | 48.3 |
| Female | 156 | 51.7 | |
| Age | Under 18 years old | 10 | 3.31 |
| 19–25 years old | 165 | 54.64 | |
| 26–30 years old | 64 | 21.19 | |
| 31–40 years old | 57 | 18.87 | |
| Over 40 years old | 6 | 1.99 | |
| Education level or educational attainment | High school or below | 31 | 10.26 |
| College diploma | 52 | 17.22 | |
| Bachelor’s degree | 183 | 60.60 | |
| Master’s degree or below | 36 | 11.92 | |
| Income | <5000 | 161 | 54.3 |
| 5000–1 W | 48 | 16.9 | |
| 1–2 W | 34 | 11.3 | |
| 2–3 W | 28 | 9.3 | |
| 3–5 W | 14 | 4.6 | |
| >5 W | 14 | 3.6 | |
| Number of vehicles owned | 0 | 54 | 17.9 |
| 1 | 188 | 62.3 | |
| 2 | 55 | 18.2 | |
| 3 or more vehicles | 5 | 1.7 | |
| Actual driving experience | No driver’s license or licensed but no actual driving experience | 103 | 34.1 |
| 0–1 year of driving experience | 62 | 20.5 | |
| 1–3 years of driving experience | 83 | 27.5 | |
| More than 3 years of driving experience | 54 | 17.9 |
| Latent Variable | Measured Variable | Sample Size | Maximum Value | Minimum Value | Mean or Average | Standard Deviation |
|---|---|---|---|---|---|---|
| Performance expectancy | PU1 | 302 | 5 | 1 | 3.55 | 0.853 |
| PU2 | 302 | 5 | 1 | 3.65 | 0.882 | |
| PU3 | 302 | 5 | 1 | 3.55 | 0.866 | |
| PU4 | 302 | 5 | 1 | 2.43 | 0.692 | |
| PU5 | 302 | 5 | 1 | 2.45 | 0.743 | |
| Effort expectancy | PEU1 | 302 | 5 | 1 | 2.45 | 0.728 |
| PEU2 | 302 | 5 | 1 | 3.82 | 0.777 | |
| Perceived risk | PRE1 | 302 | 5 | 1 | 3.74 | 0.792 |
| PRE2 | 302 | 5 | 1 | 3.61 | 0.796 | |
| PRE3 | 302 | 5 | 1 | 3.59 | 0.745 | |
| Convenient conditions | FC1 | 302 | 5 | 1 | 3.59 | 0.730 |
| FC2 | 302 | 5 | 1 | 3.67 | 0.736 | |
| FC3 | 302 | 5 | 1 | 3.68 | 0.703 | |
| Social impact | SI1 | 302 | 5 | 1 | 3.64 | 0.732 |
| SI2 | 302 | 5 | 1 | 3.65 | 0.709 | |
| SI3 | 302 | 5 | 1 | 3.67 | 0.749 | |
| Attitude | ATB1 | 302 | 5 | 1 | 3.61 | 0.746 |
| ATB2 | 302 | 5 | 1 | 3.60 | 0.956 | |
| ATB3 | 302 | 5 | 1 | 3.54 | 0.738 | |
| Use Behavior | BI1 | 302 | 5 | 1 | 3.78 | 0.732 |
| BI2 | 302 | 5 | 1 | 3.51 | 0.751 | |
| BI3 | 302 | 5 | 1 | 3.55 | 0.774 |
| Performance Expectancy | Effort Expectancy | Perceived Risk | Convenient Conditions | Social Impact | Attitude | Use Behavior | ||
|---|---|---|---|---|---|---|---|---|
| Performance expectancy | Pearson correlation | 1 | 0.366 ** | −0.536 ** | 0.580 ** | 0.511 ** | 0.688 ** | 0.547 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Effort expectancy | Pearson correlation | 0.415 ** | 1 | −0.536 ** | 0.678 ** | 0.579 ** | 0.702 ** | 0.611 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Perceived risk | Pearson correlation | −0.311 ** | −0.540 ** | 1 | −0.505 ** | −0.441 ** | −0.674 ** | −0.523 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Convenient conditions | Pearson correlation | 0.498 ** | 0.826 ** | −0.366 ** | 1 | 0.643 ** | 0.864 ** | 0.546 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Social impact | Pearson correlation | 0.685 ** | 0.477 ** | −0.578 ** | 0.856 ** | 1 | 0.834 ** | 0.284 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Attitude | Pearson correlation | 0.466 ** | 0.645 ** | −0.865 ** | 0.768 ** | 0.528 ** | 1 | 0.824 ** |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 | |
| Use Behavior | Pearson correlation | 0.553 ** | 0.583 ** | −0.843 ** | 0.343 ** | 0.743 ** | 0.381 ** | 1 |
| significance (two-tailed) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | ||
| N | 302 | 302 | 302 | 302 | 302 | 302 | 302 |
| Index or Serial Number | Path | Path Coefficient Estimate | p-Value | Validation Result | Explained Variance R2 |
|---|---|---|---|---|---|
| H1 | Performance Expectancy to Attitude | 0.277 | 0.003 ** | established | |
| H2 | Performance Expectancy to Use Behavior | 0.17 | 0.006 ** | established | |
| H3 | Effort Expectancy to Performance Expectancy | 0.774 | 0.000 ** | established | |
| H4 | Effort Expectancy to Attitude | 0.254 | 0.018 ** | established | |
| H5 | perceived risk to Attitude | −0.148 | 0.008 ** | established | |
| H6 | perceived risk to Use Behaviour | −0.111 | 0.01 ** | established | |
| H7 | social impact to Attitude | 0.105 | 0.082 ** | not established | 0.409 |
| H8 | social impact to attitude | 0.144 | 0.028 ** | established | |
| H9 | social impact to perceived risk | 0.085 | 0.539 ** | not established | |
| H10 | convenient conditions to Performance Expectancy | 0.03 | 0.393 ** | not established | |
| H11 | convenient conditions to Attitude | 0.214 | 0.024 ** | established | |
| H12 | convenient conditions to Use Behaviour | 0.21 | 0.002 ** | established | |
| H13 | Attitude to Use Behaviour | 0.519 | 0.000 ** | established |
| Car Purchase Intention | Variable Name | MNL | ||
|---|---|---|---|---|
| Estimated Parameter Value | Z-Test Value | p > IzI | ||
| Autonomous vehicle | Constant term | 1.387 | 1.54 | 0.124 |
| Autonomous vehicle ownership rate | −0.121 | −9.90 | 0.000 | |
| AV usage scenarios | −0.402 | −8.73 | 0.000 | |
| AV purchase price | 0.800 | −10.76 | 0.000 | |
| Performance expectancy | 0.437 | 3.26 | 0.001 | |
| Effort expectancy | 0.101 | 1.98 | 0.048 | |
| Perceived risk | −0.194 | −2.00 | 0.046 | |
| Social impact | −0.209 | −1.70 | 0.089 | |
| Convenient conditions | −0.108 | −1.96 | 0.050 | |
| Attitude | −0.331 | −2.01 | 0.045 | |
| Use Behavior | 0.533 | 3.02 | 0.003 | |
| Driver’s license | −0.357 | v2.62 | 0.009 | |
| Education level 1 | 0.092 | 0.23 | 0.820 | |
| Education level 2 | 0.363 | 0.89 | 0.372 | |
| Education level 3 | 0.380 | 1.41 | 0.158 | |
| Personal income 1 | 0.529 | 1.63 | 0.102 | |
| Personal income 2 | 0.434 | 1.22 | 0.222 | |
| Personal income 3 | 0.269 | 0.72 | 0.474 | |
| Personal income 4 | 0.365 | 0.98 | 0.328 | |
| Personal income 5 | 0.873 | 2.04 | 0.042 | |
| Number of car ownership 1 | 1.539 | 2.85 | 0.004 | |
| Number of car ownership 2 | 1.089 | 2.07 | 0.038 | |
| Number of car ownership 3 | 1.207 | 2.23 | 0.026 | |
| Number of ca r ownership 4 (reference item) | - | - | - | |
| Variable Name | Autonomous Vehicle Ownership Rate | AV Usage Scenarios | AV Purchase Price | Performance Expectancy | Effort Expectancy | Perceived Risk | Attitude |
|---|---|---|---|---|---|---|---|
| Elasticity value | −0.0156 | −0.0340 | −0.0405 | 0.0502 | 0.0375 | −0.0252 | 0.0148 |
| p > IzI | 0.000 | 0.000 | 0.000 | 0.024 | 0.038 | 0.028 | 0.037 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Tang, J.; Wu, Z.; Jia, M. Influence of Psychological and Socioeconomic Factors on Purchase Likelihood for Autonomous Vehicles: A Hybrid Choice Modeling Approach. Sustainability 2023, 15, 15452. https://doi.org/10.3390/su152115452
Liang Y, Tang J, Wu Z, Jia M. Influence of Psychological and Socioeconomic Factors on Purchase Likelihood for Autonomous Vehicles: A Hybrid Choice Modeling Approach. Sustainability. 2023; 15(21):15452. https://doi.org/10.3390/su152115452
Chicago/Turabian StyleLiang, Yunyi, Jinjun Tang, Zhizhou Wu, and Mei Jia. 2023. "Influence of Psychological and Socioeconomic Factors on Purchase Likelihood for Autonomous Vehicles: A Hybrid Choice Modeling Approach" Sustainability 15, no. 21: 15452. https://doi.org/10.3390/su152115452
APA StyleLiang, Y., Tang, J., Wu, Z., & Jia, M. (2023). Influence of Psychological and Socioeconomic Factors on Purchase Likelihood for Autonomous Vehicles: A Hybrid Choice Modeling Approach. Sustainability, 15(21), 15452. https://doi.org/10.3390/su152115452