



A Particle Swarm Optimization–Adaptive Weighted Delay Velocity-Based Fast-Converging Maximum Power Point Tracking Algorithm for Solar PV Generation System

 ,
,  , ,
, ,  , and
, and 
Abstract
:1. Introduction
2. Literature Survey
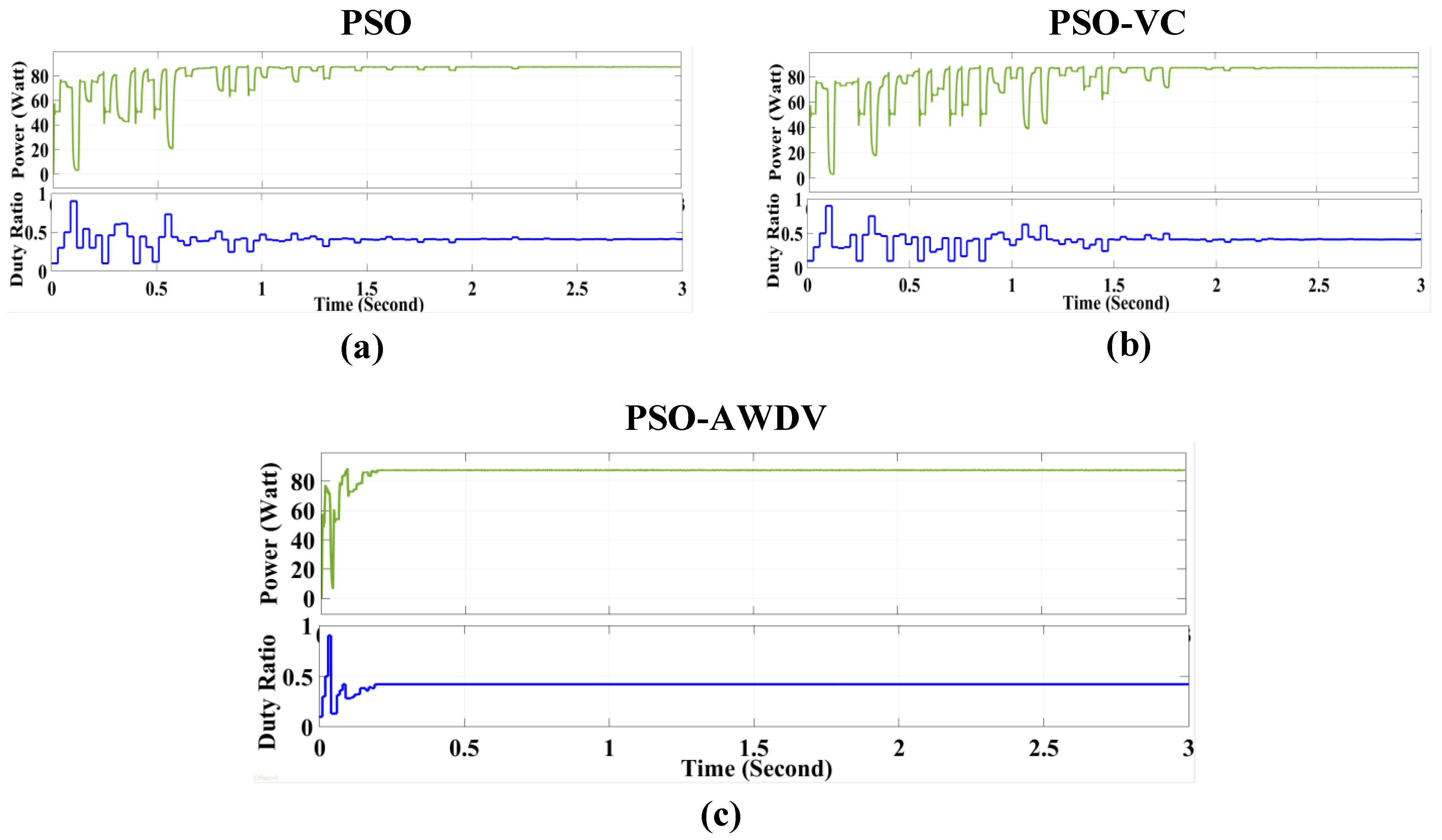
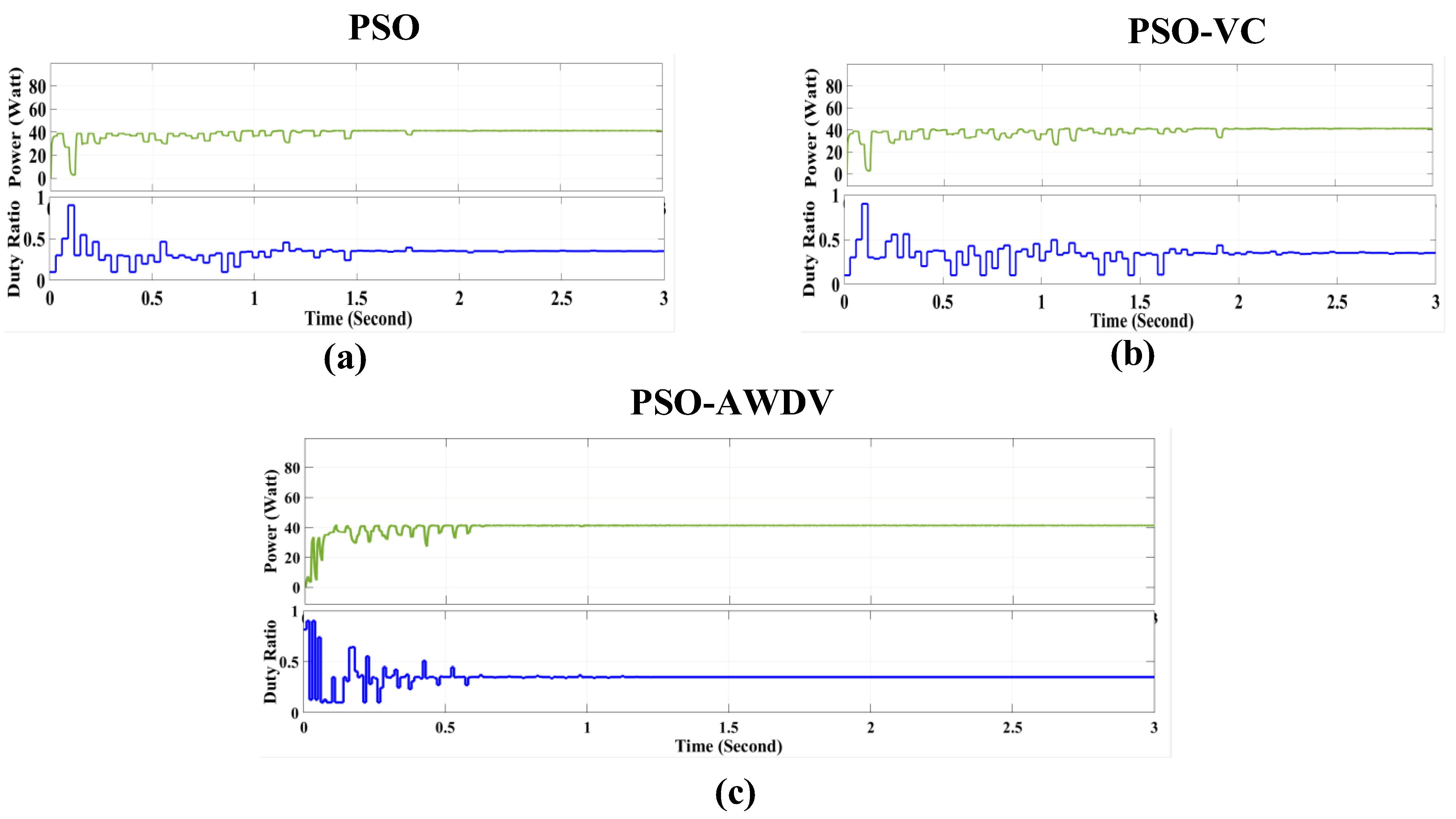
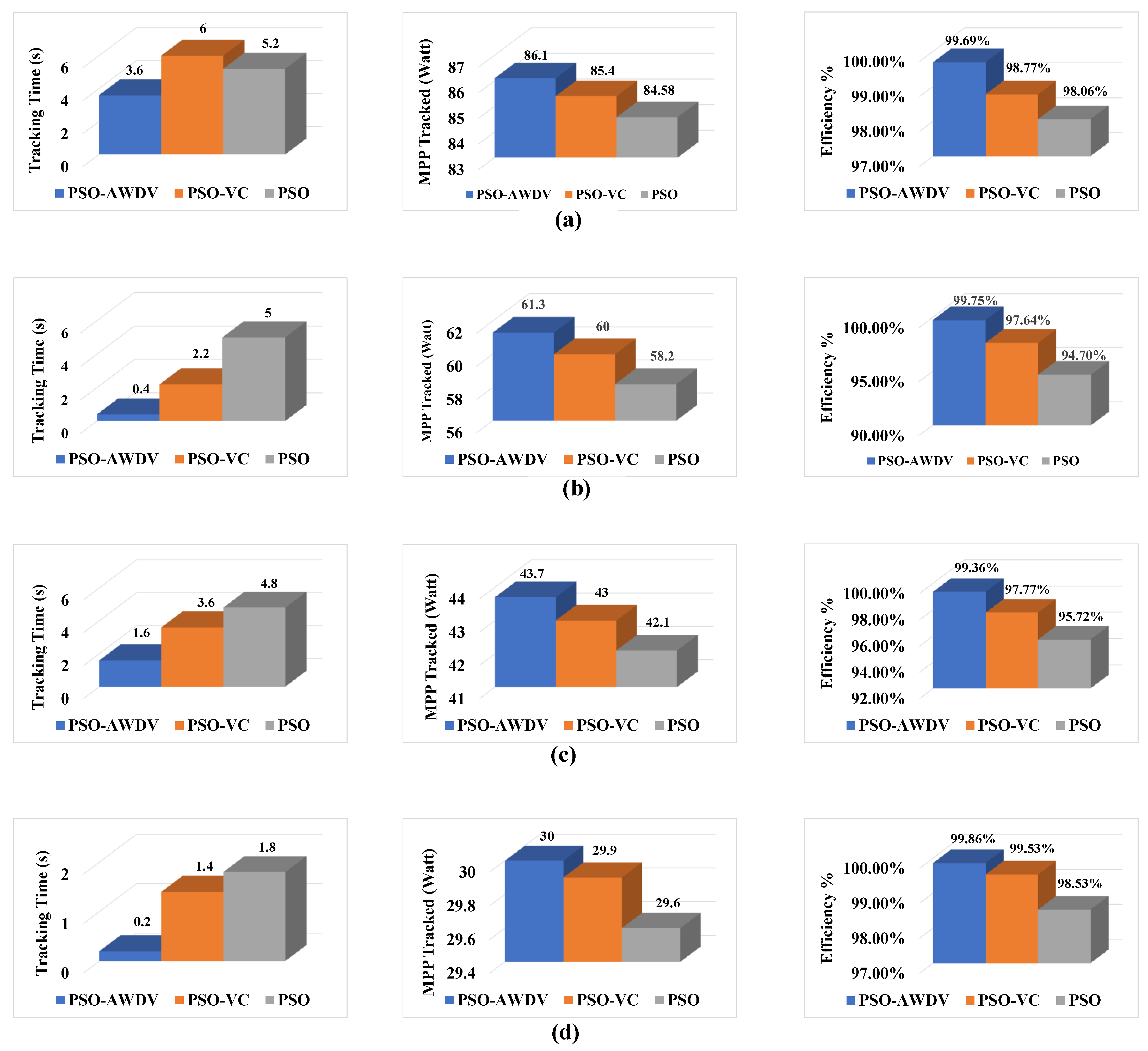
- The PSO-AWDV algorithm has a simple formulation and has less computational complexity than conventional PSO and its variant PSO-VC.
- It could locate the MPP for complex shading patterns including partial shading conditions and significant insolation fluctuations.
- The efficiency of tracking is also very high and better than conventional PSO and PSO-VC.
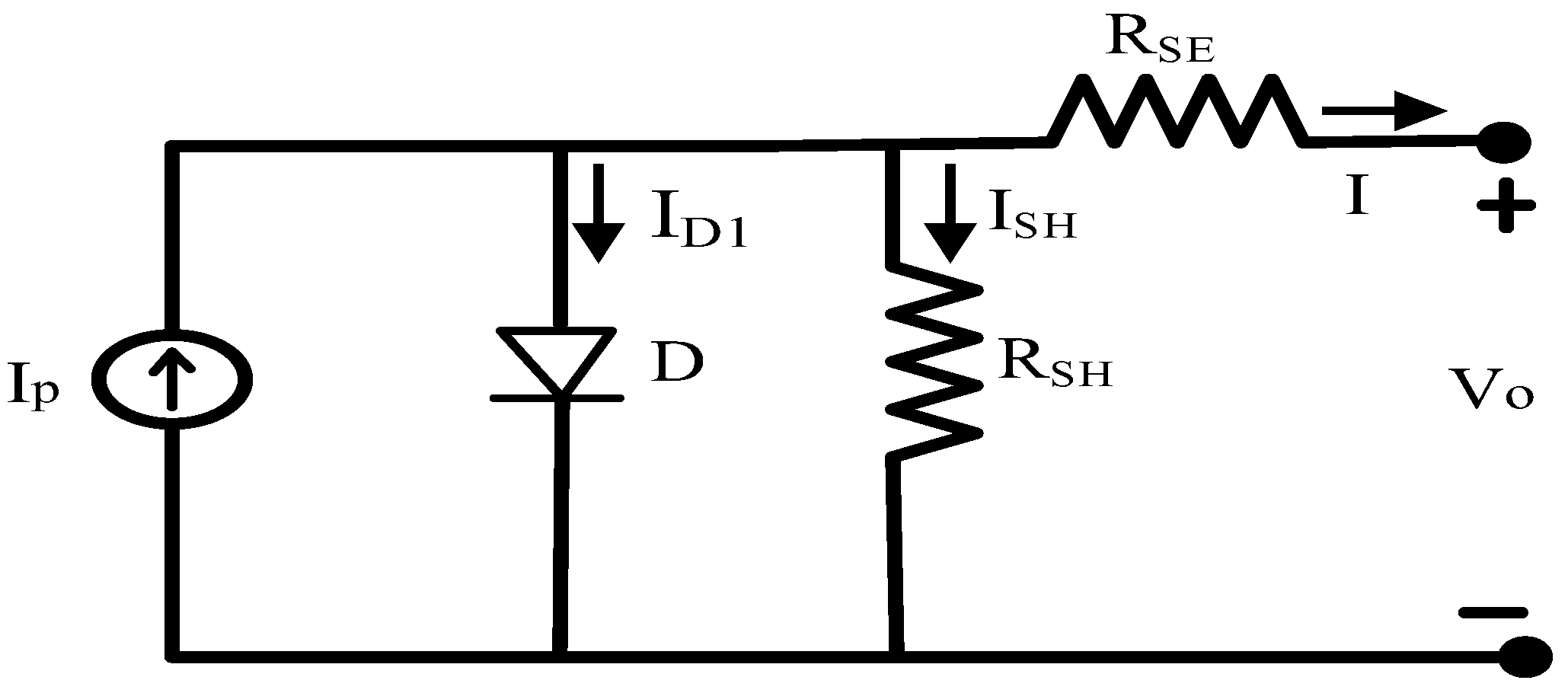
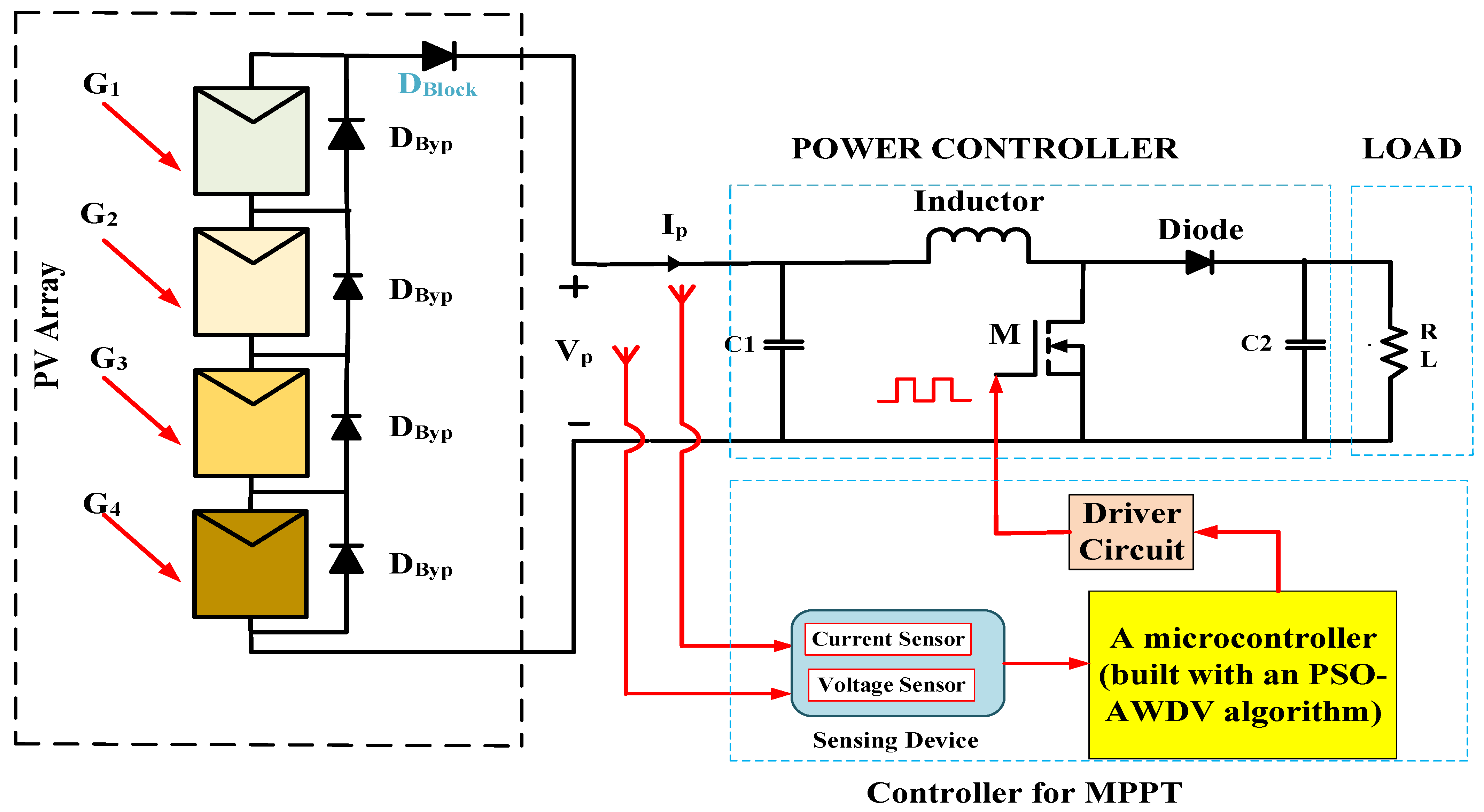
3. Modelling of Photovoltaic (PV) System
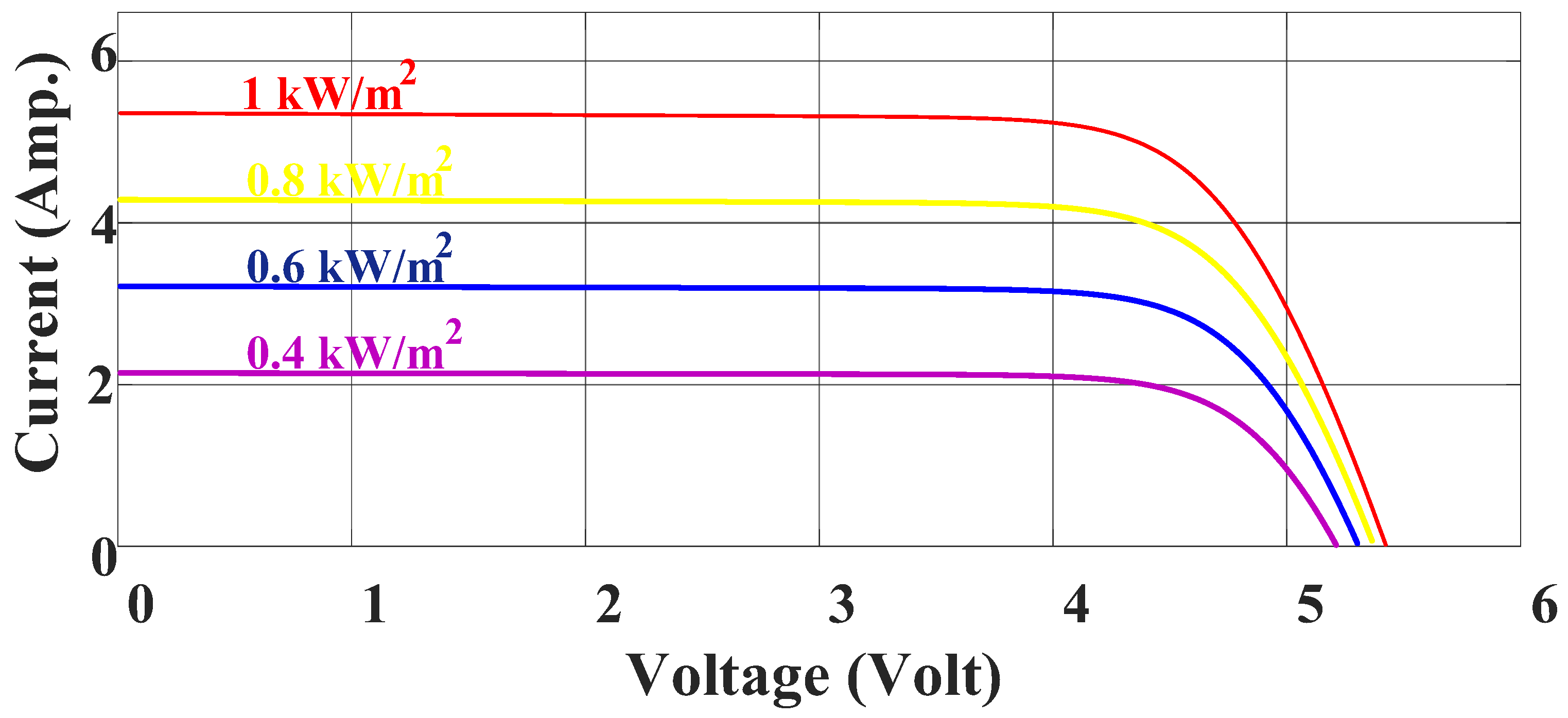
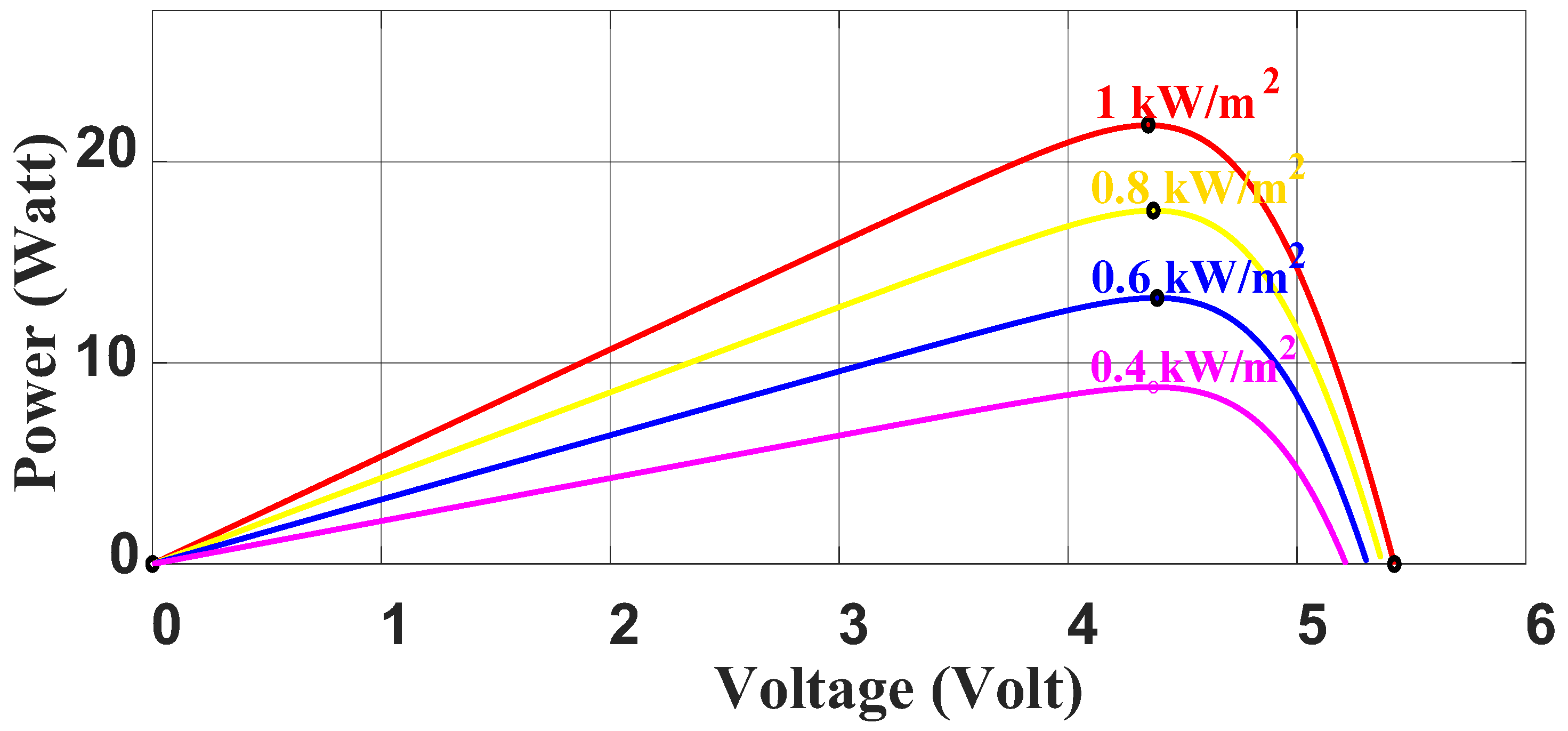
4. Solar Cell Characteristics
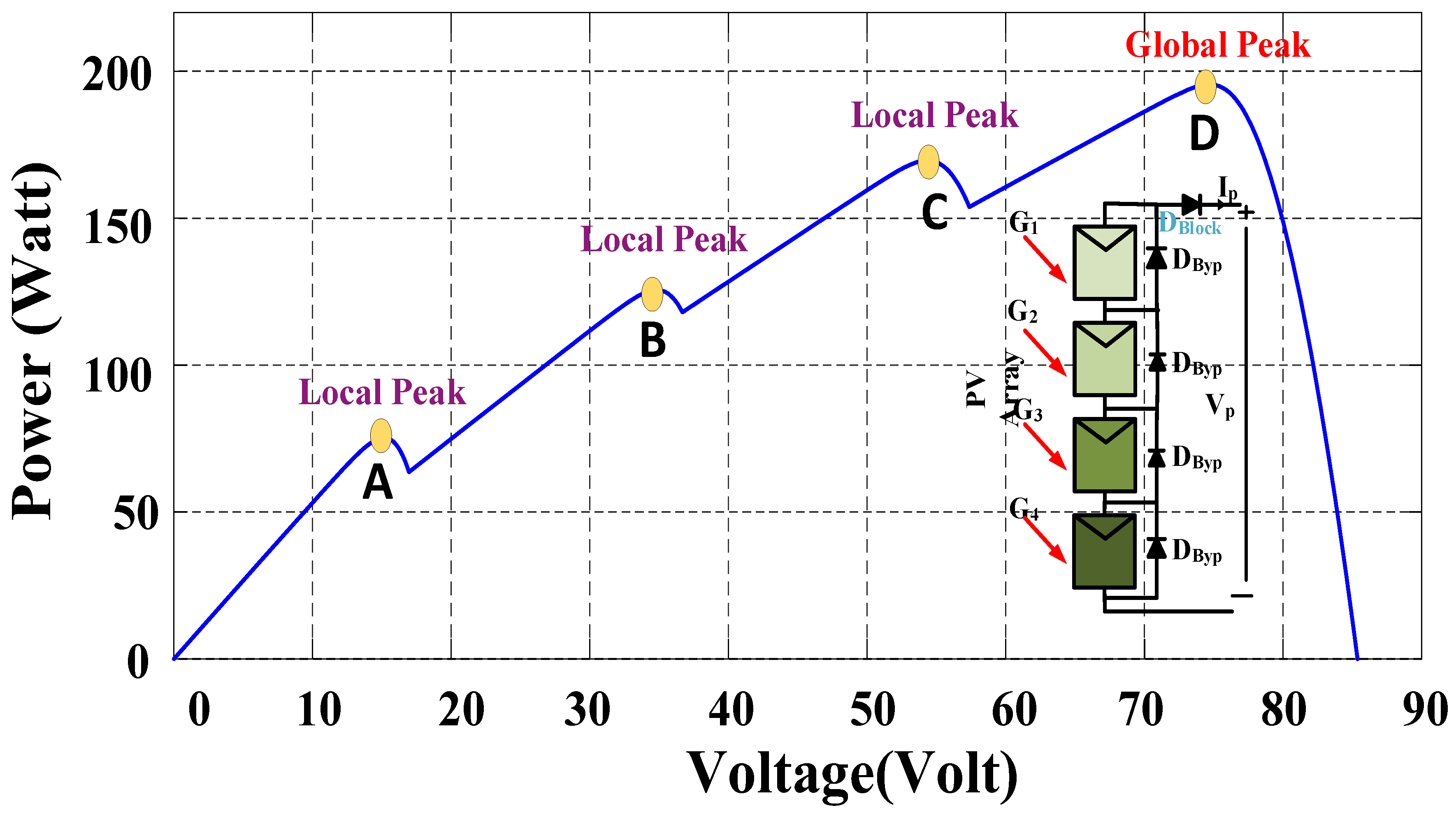
5. PV Array under Partially Shaded Condition
6. Maximum Power Point (MPP) Tracker
7. MPPT Based on Metaheuristic Optimization Algorithms
- Minimal failure rate: There should be little chance of early convergence or failure for the MPPT algorithm. It is determined by dividing the total number of attempts by the number of efforts that converge to one of the MPPs.
- Rapid convergence: An economic MPP tracker should use fewer computing rounds since the MPPT method should soon settle at the MPP.
- Consistent fluctuations: The MPPT algorithm should possess dependable abilities for both exploring and exploiting the search space, avoiding unnecessary traversal of irrelevant regions. As a result, power fluctuations and related losses are decreased.
- Resilience: Even in the presence of significant oscillations under PS circumstances and abrupt dynamic changes in PV insolation, the GMPP should be recognizable by the MPPT algorithm.
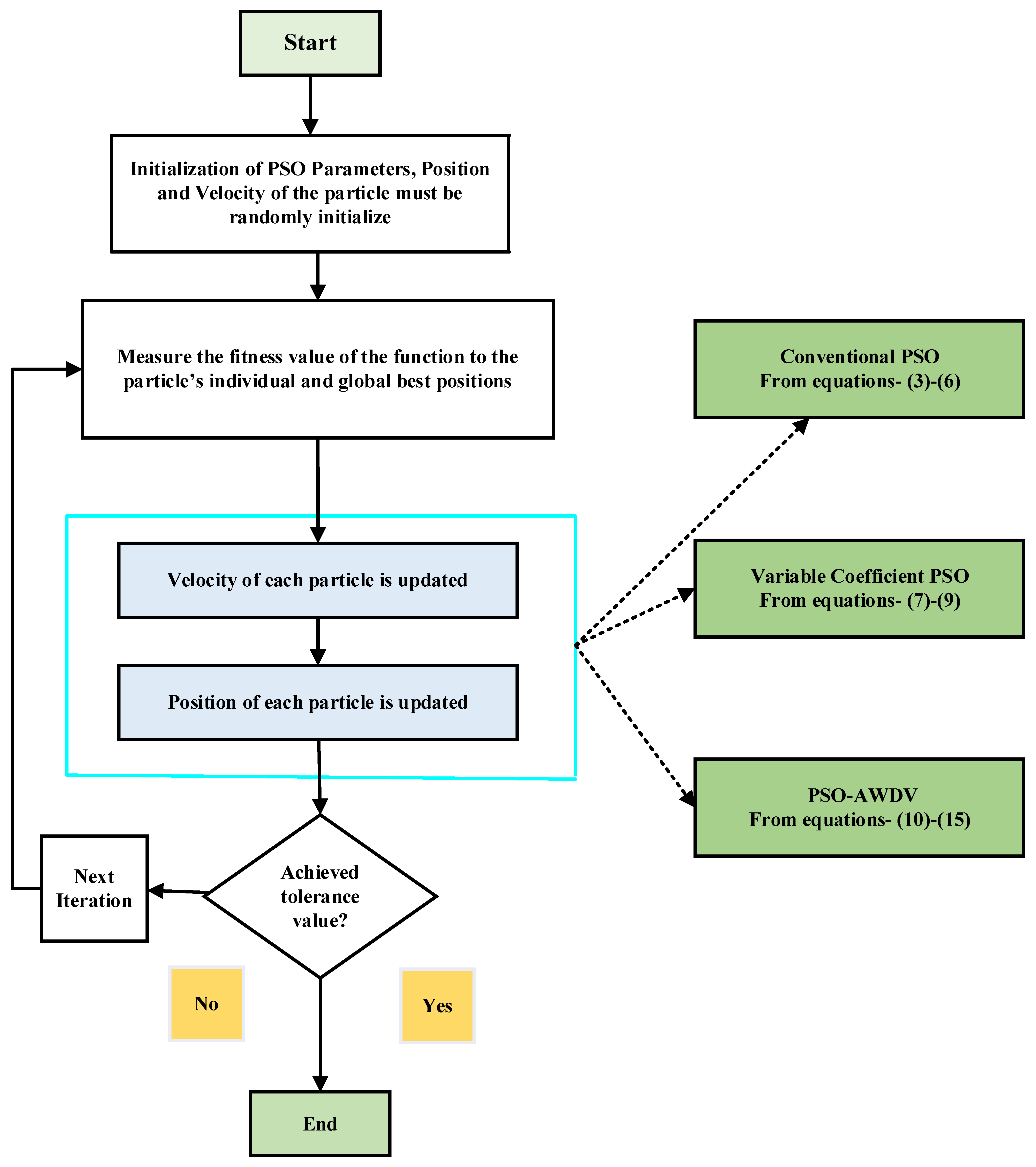
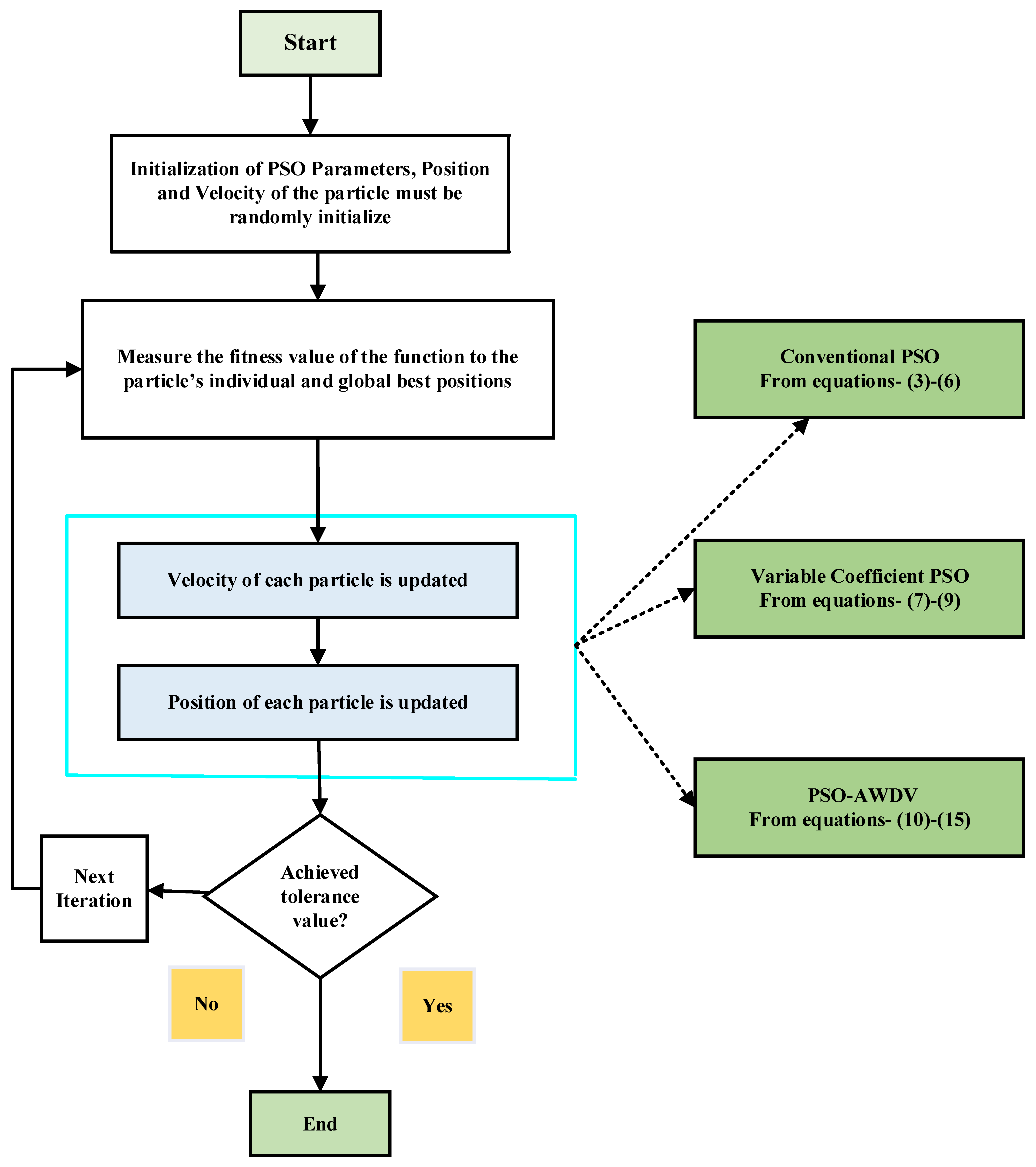
7.1. Conventional PSO and Its Implementation
7.2. PSO-Variable Coefficient (PSO-VC)
7.3. PSO–Adaptive Weighted Delay Velocity (PSO-AWDV)
8. Simulation Results and Discussion
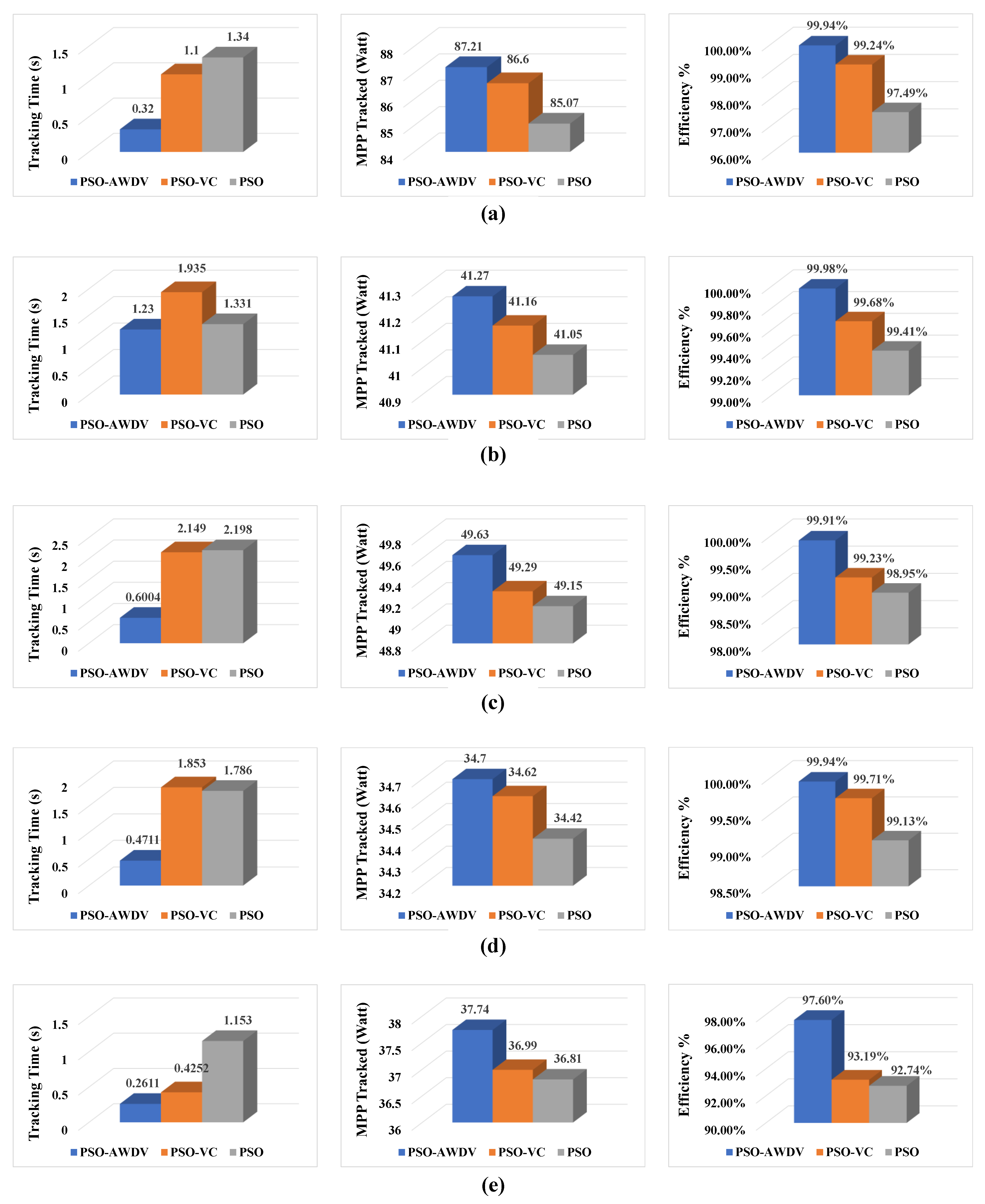
8.1. Condition of Static Partial Shading
8.1.1. Condition 1: Full Insolation
8.1.2. Condition 2: Weak PS Condition
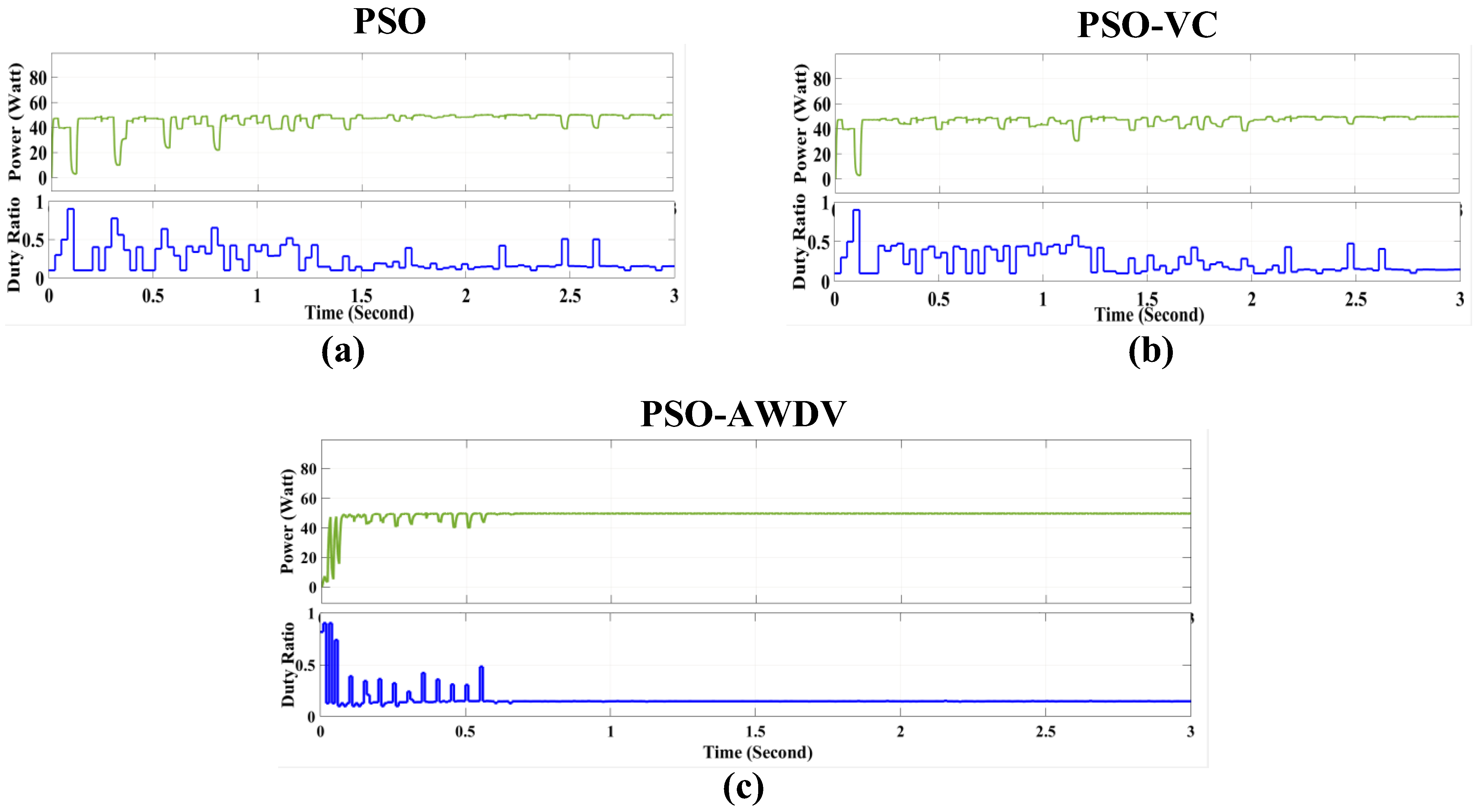
8.1.3. Condition 3: Strong PS Condition
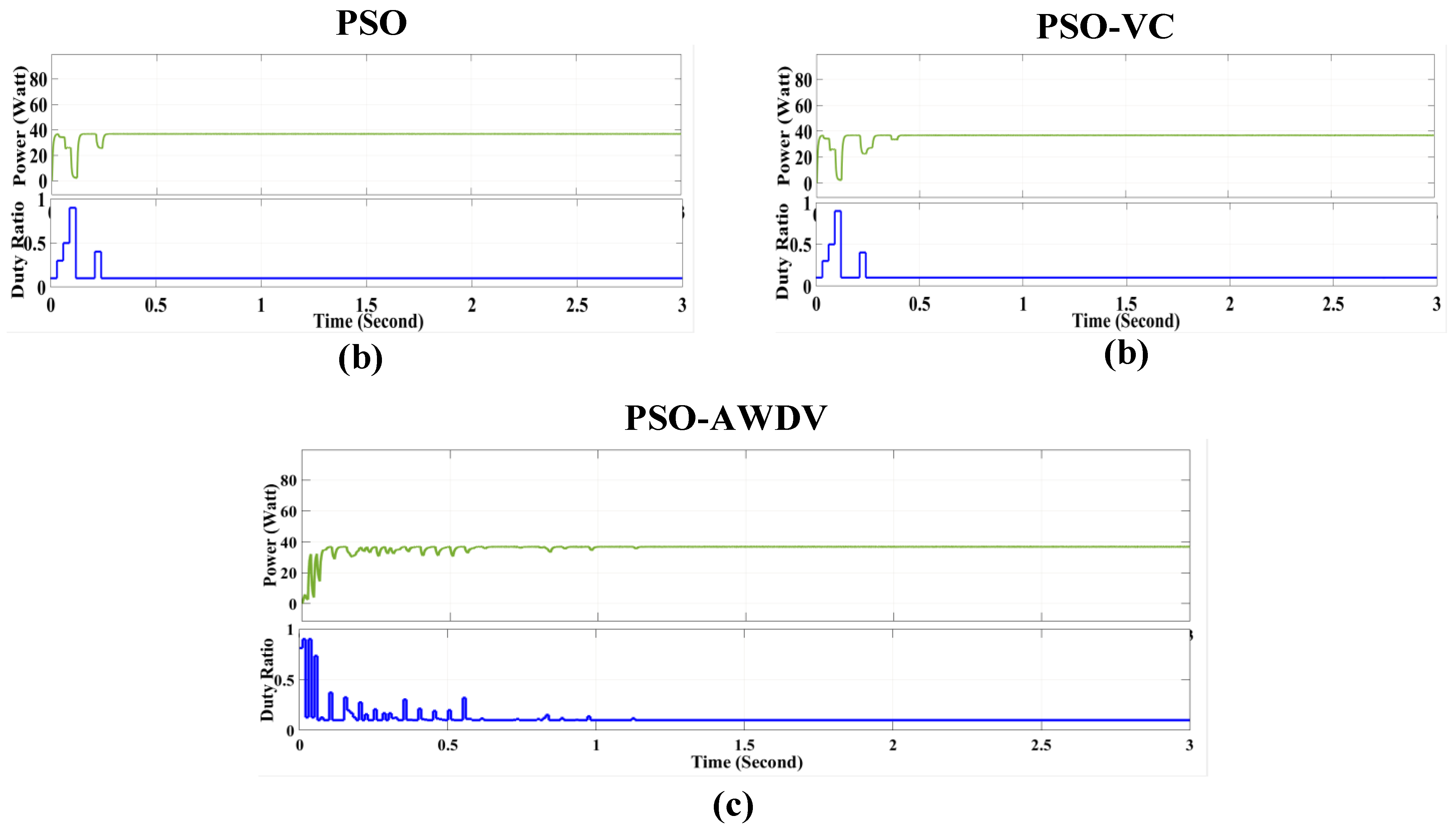
8.1.4. Condition 4: Strong PS Condition
8.1.5. Condition 5: Strong PS Condition
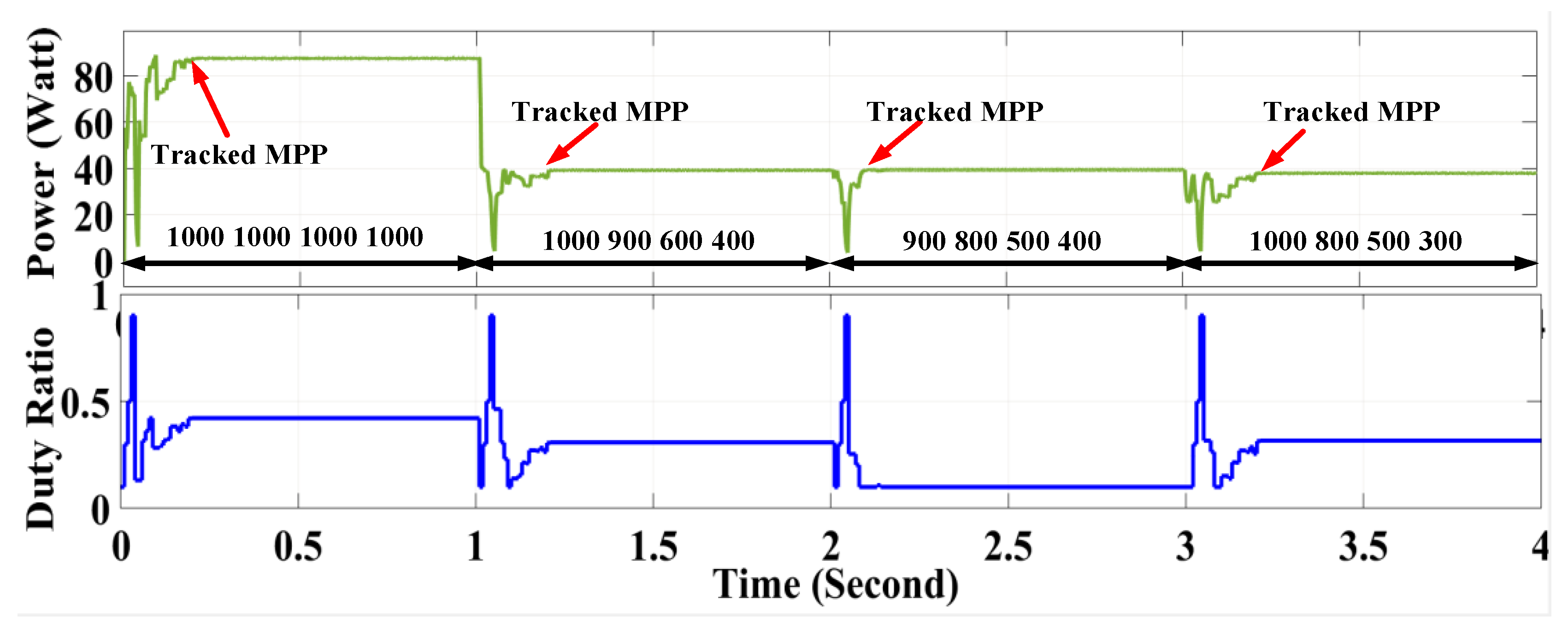
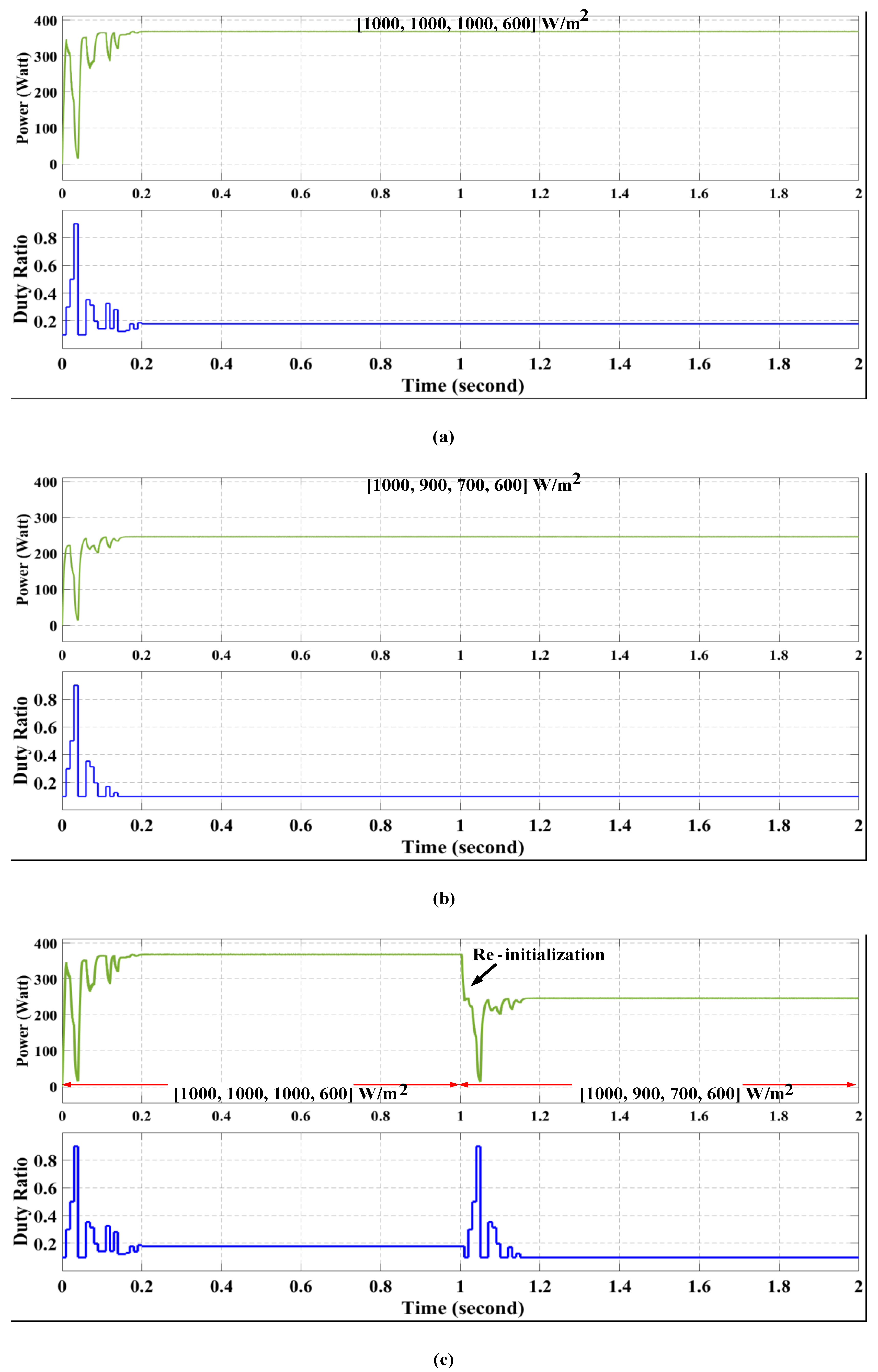
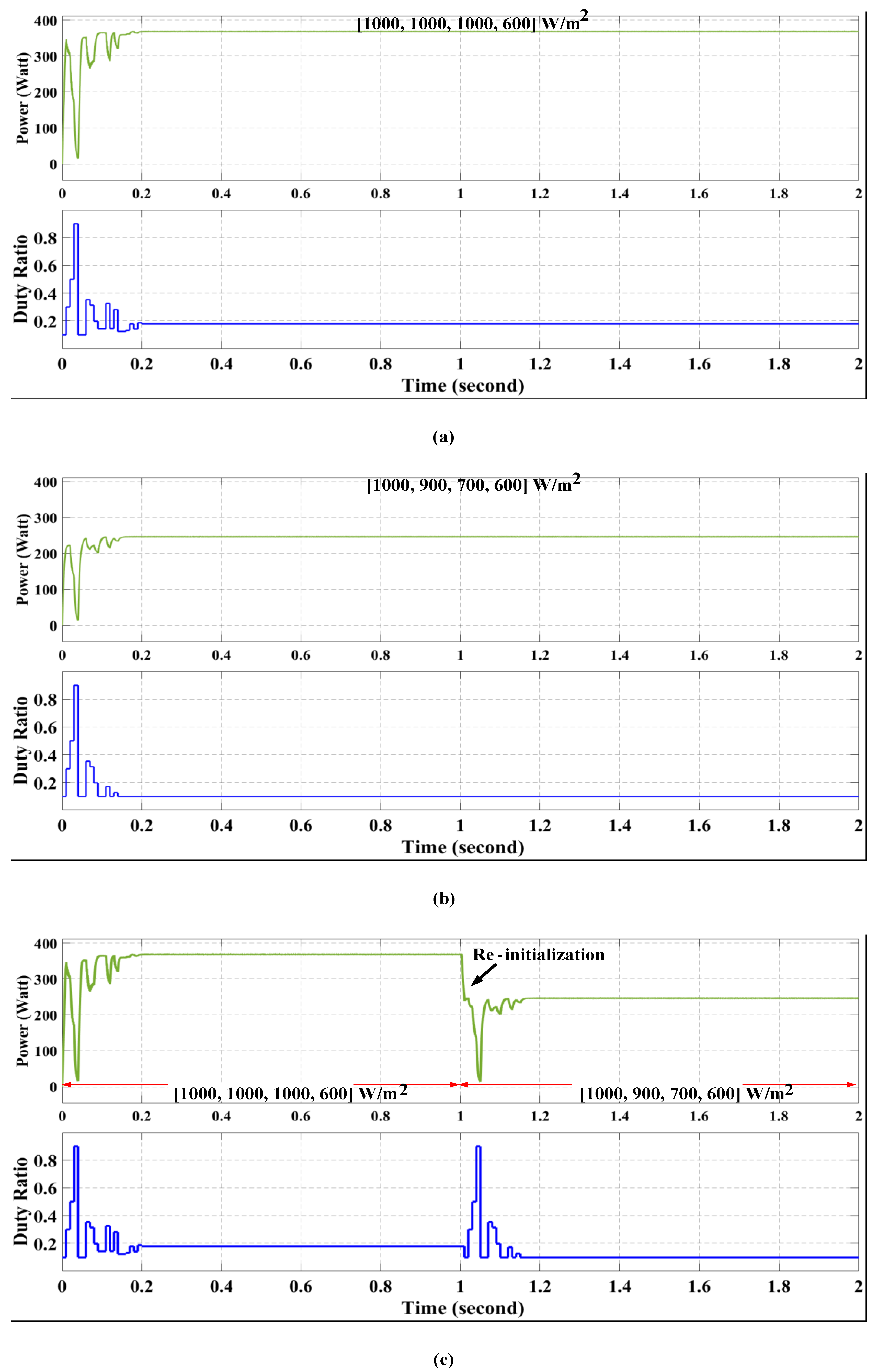
8.2. Dynamic Partial Shading Condition
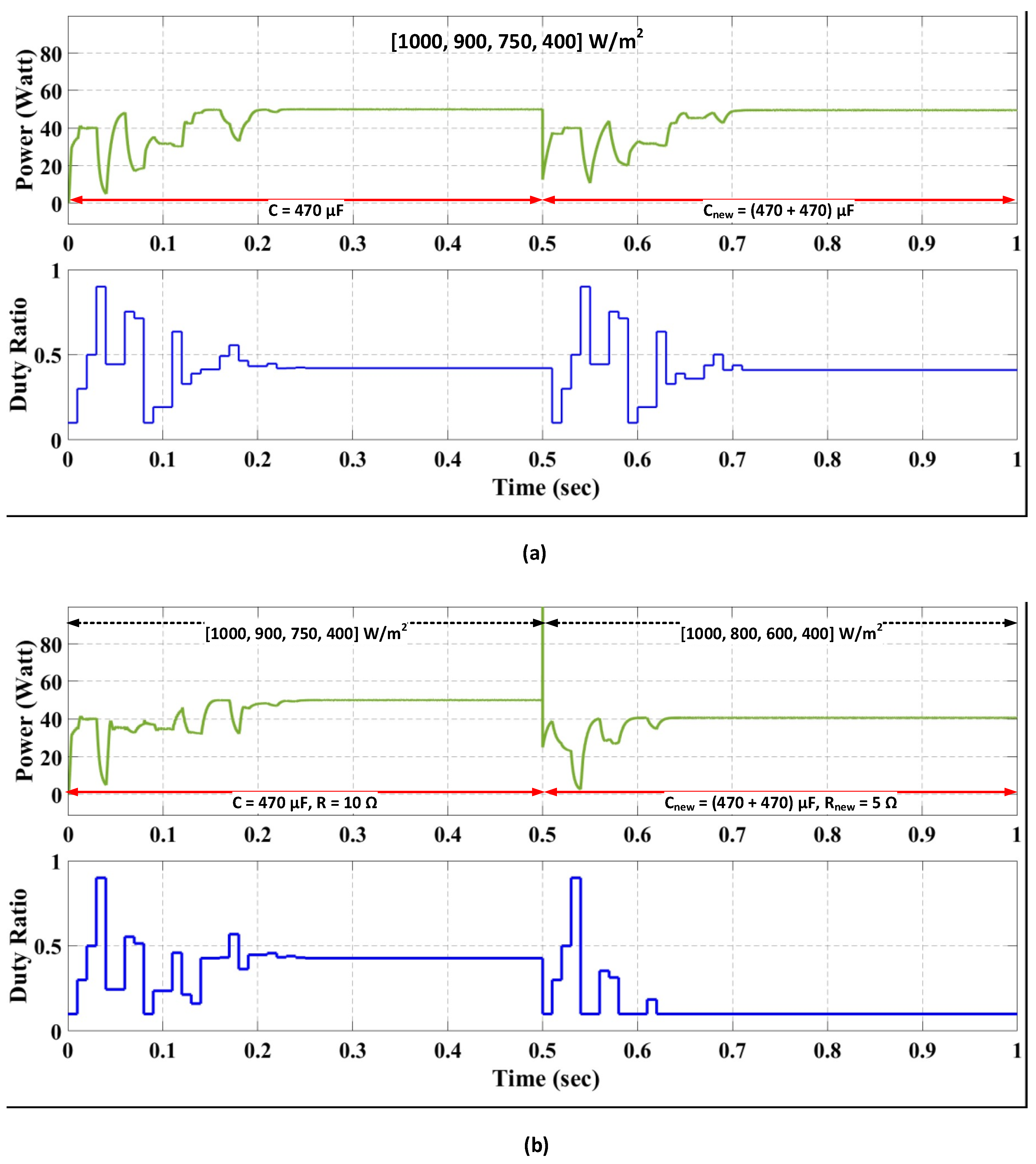
8.3. Effect of Load Change
8.4. Effect of PV Module Change
8.5. Performance Evaluation Test for Robustness against Converter Parametric Uncertainties
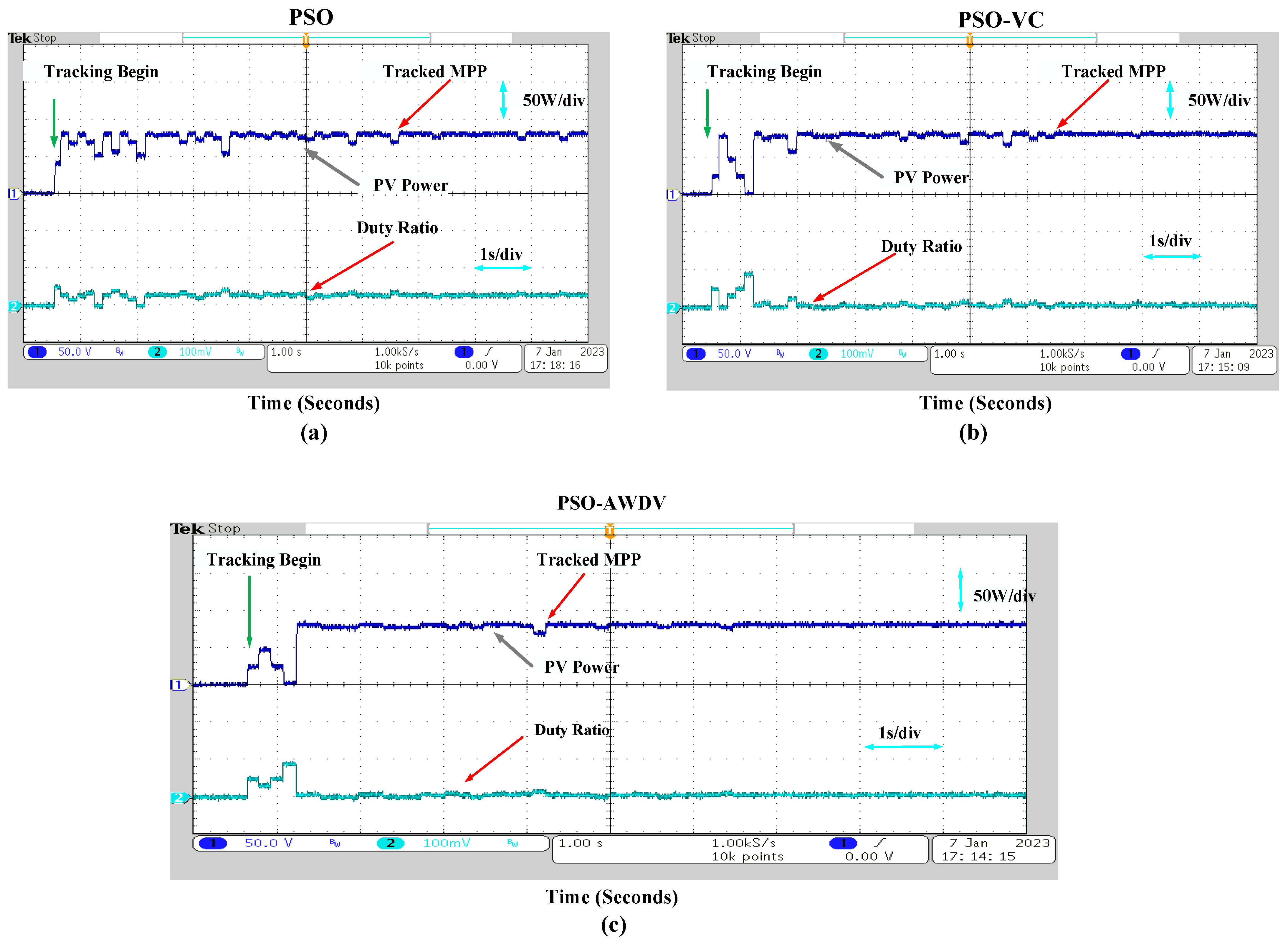
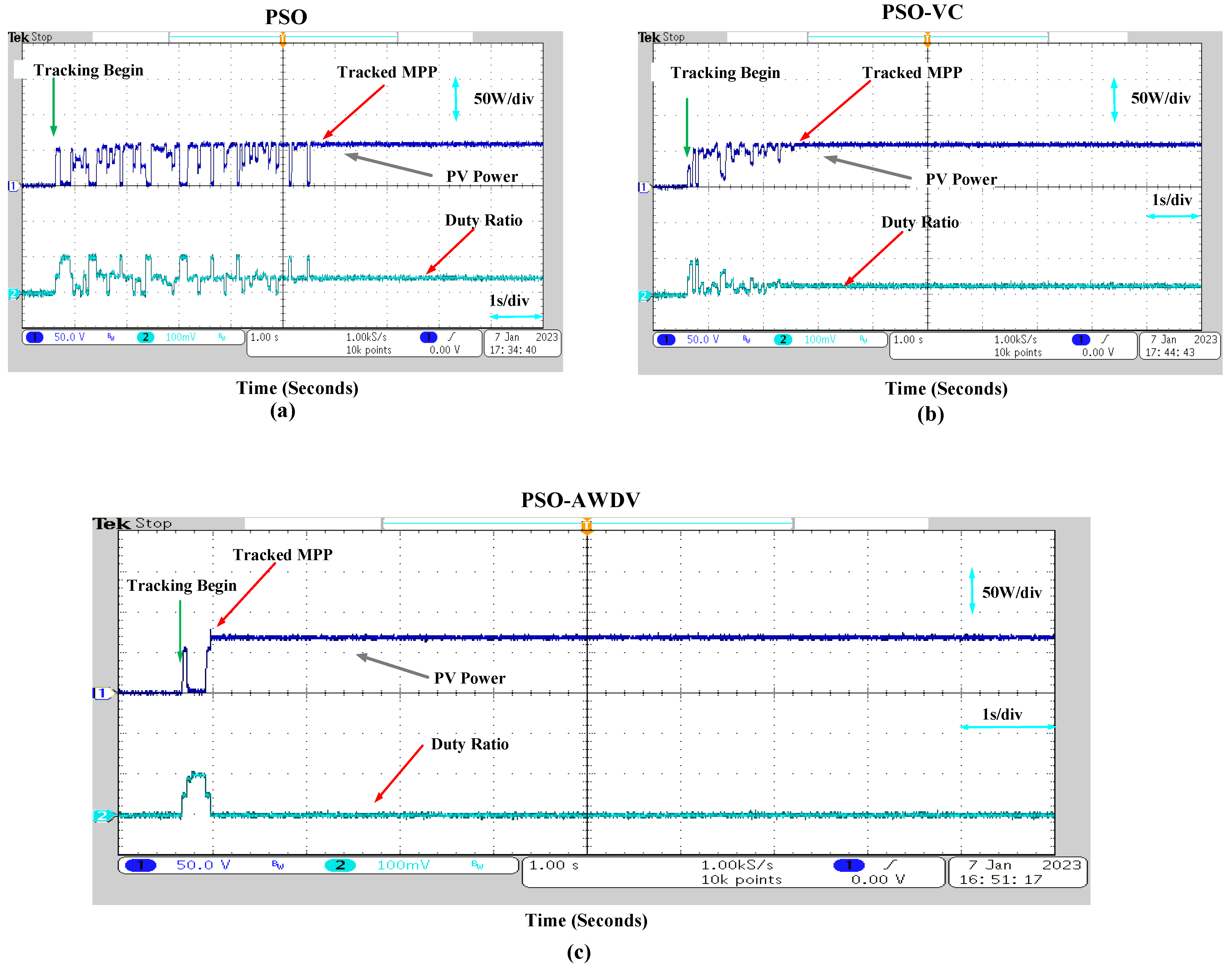
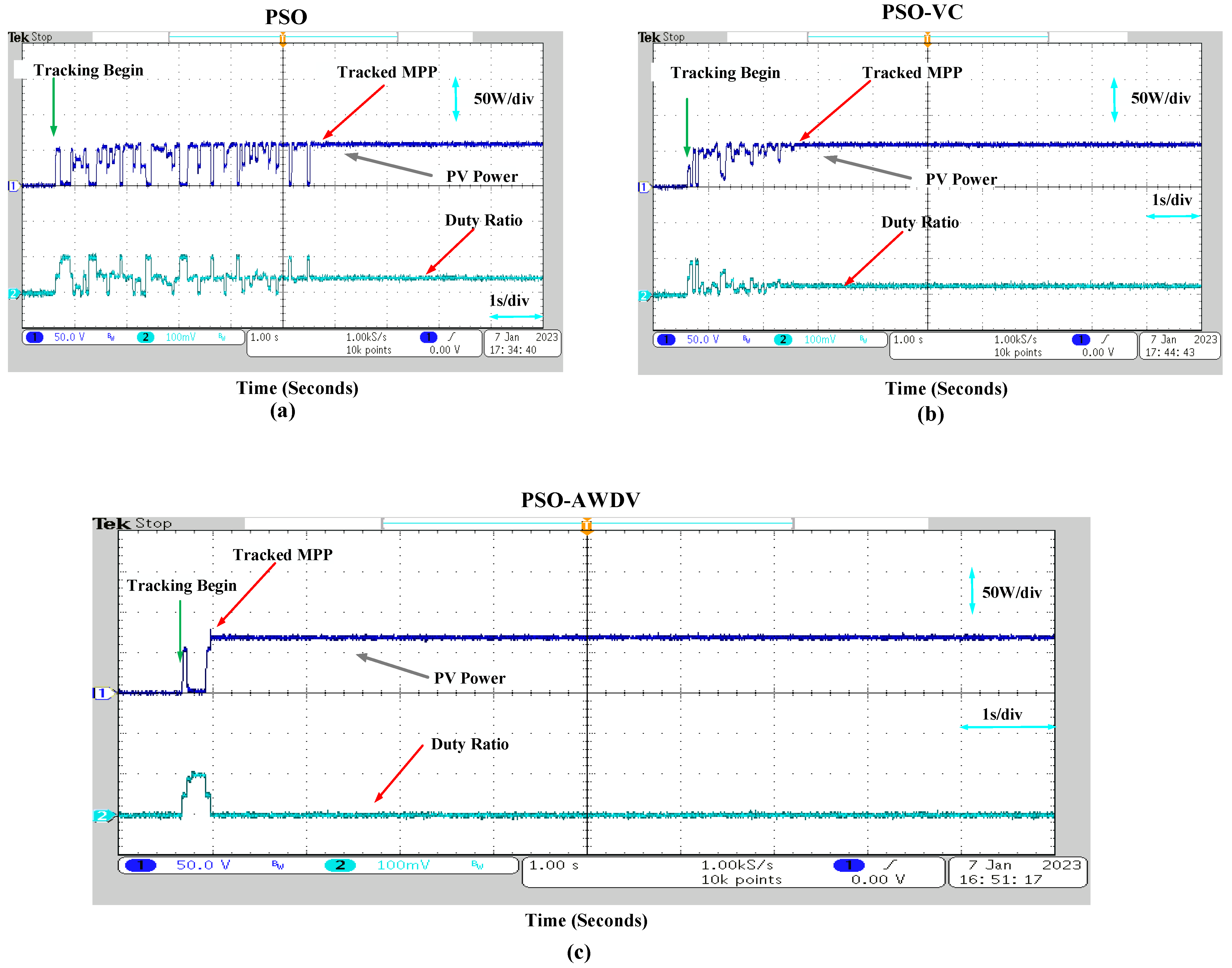
9. Hardware-In-The-Loop (HIL) Implementations of PSO-AWDV Algorithm
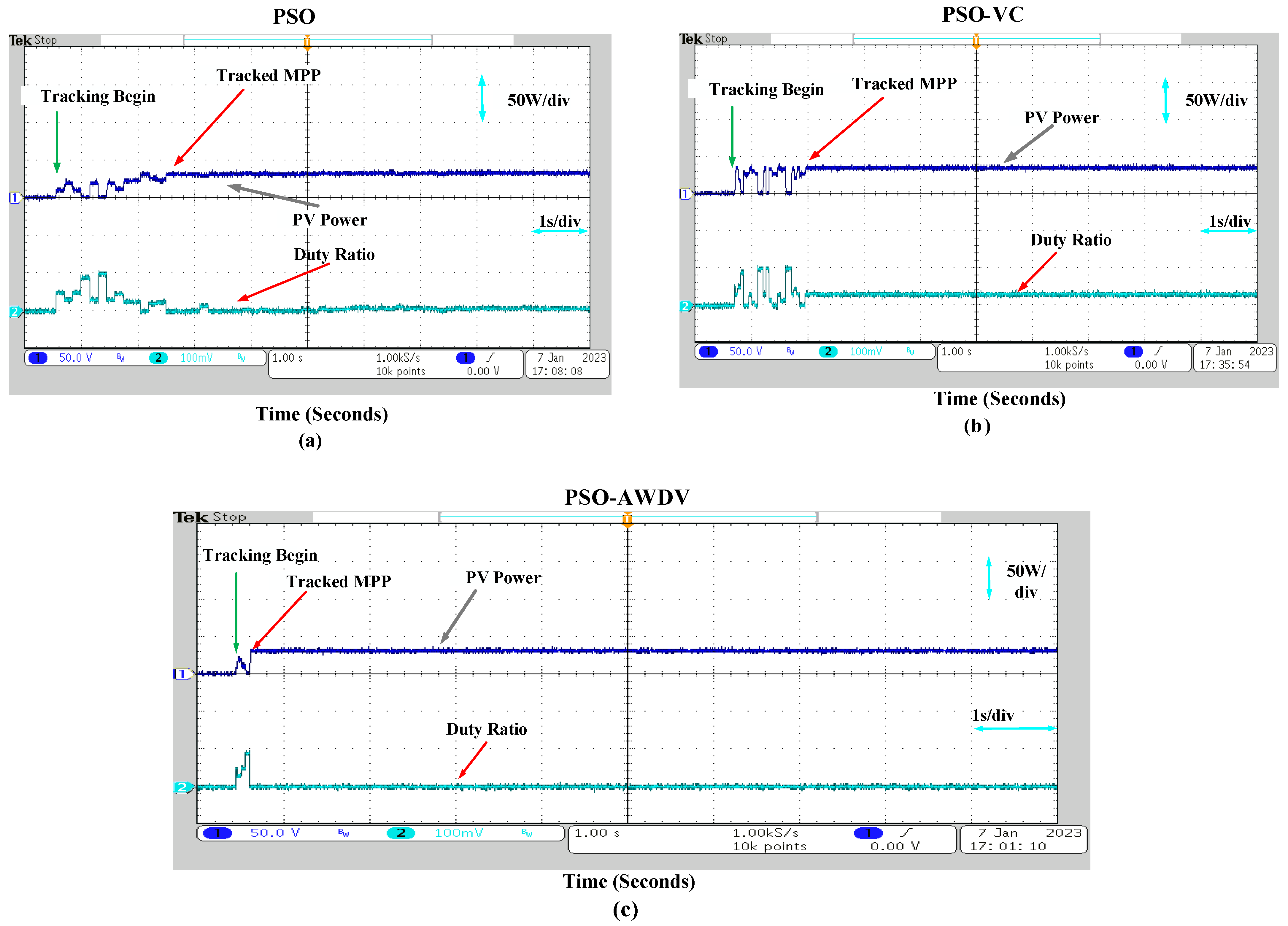
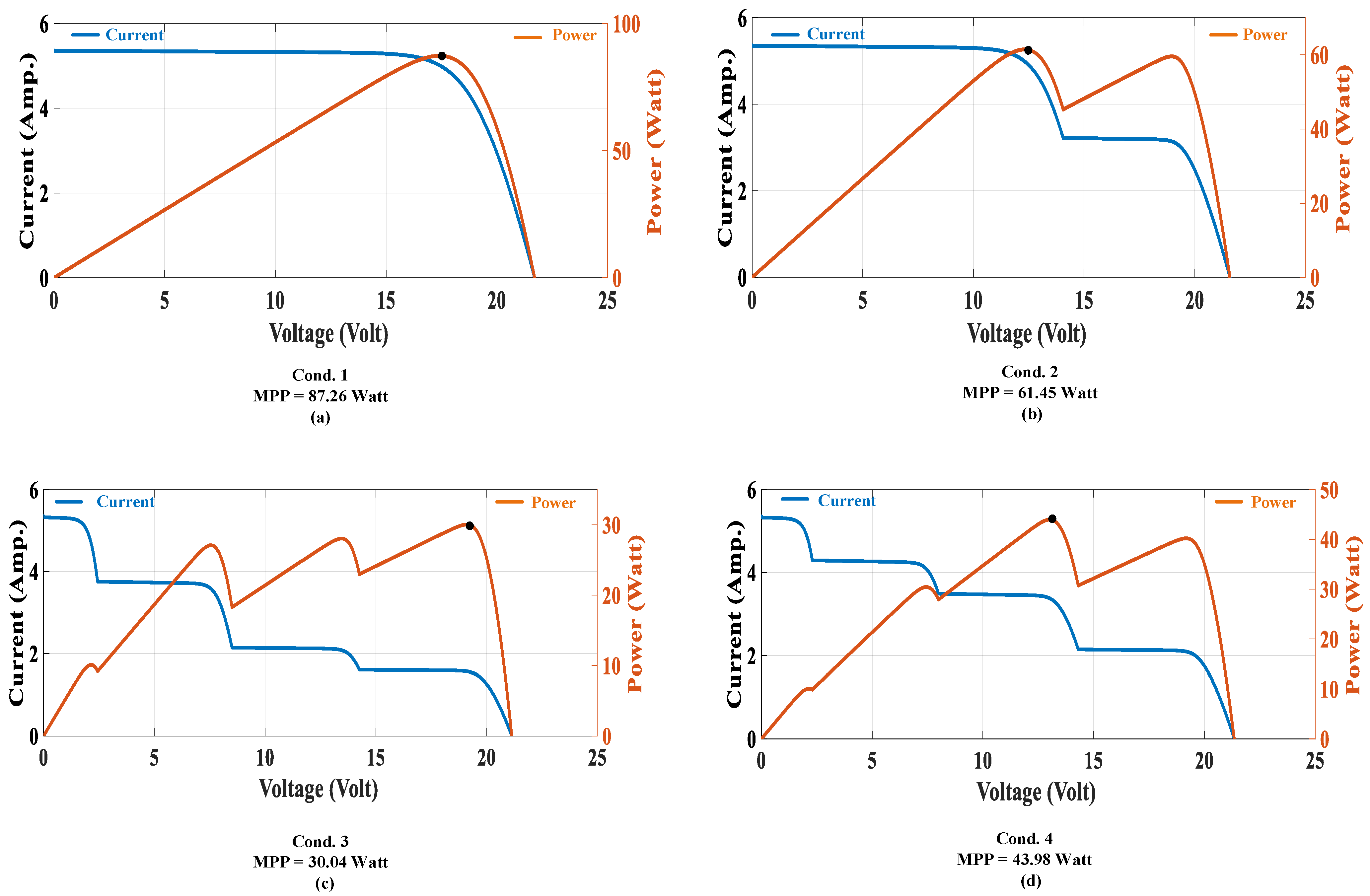
9.1. Condition of Static Partial Shading
9.1.1. Condition 1
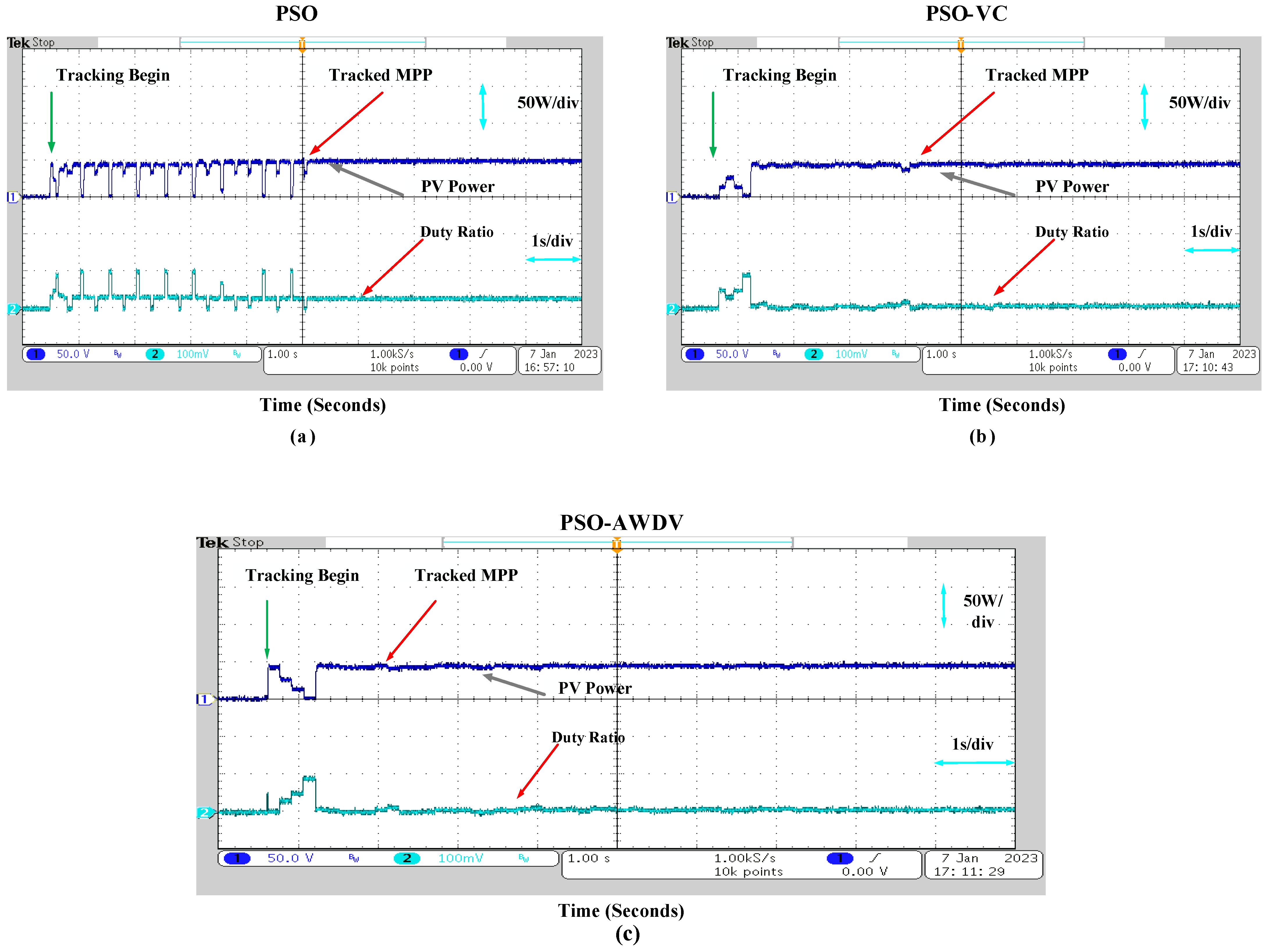
9.1.2. Condition 2
9.1.3. Condition 3
9.1.4. Condition 4
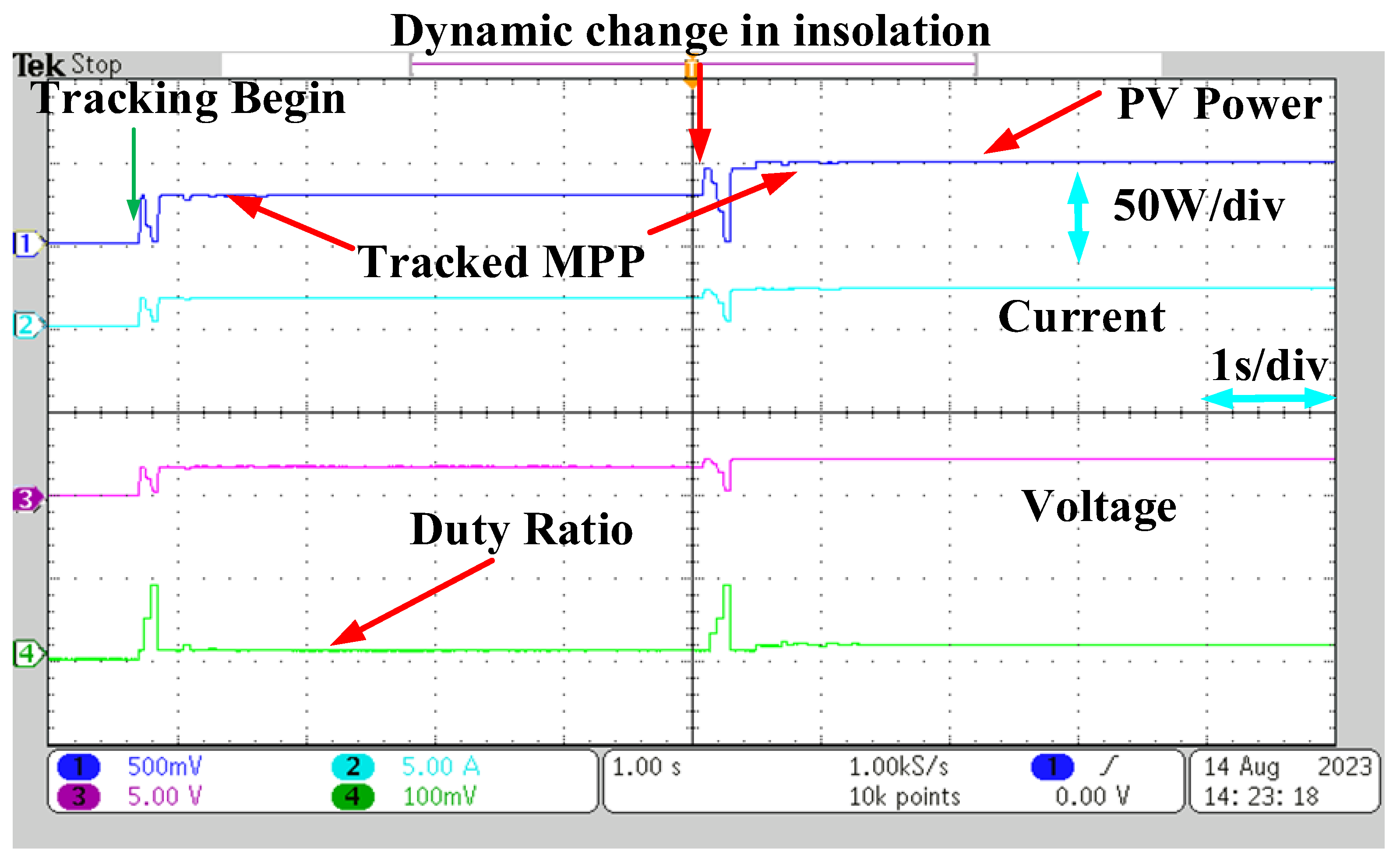
9.2. Dynamic Partial Shading Condition
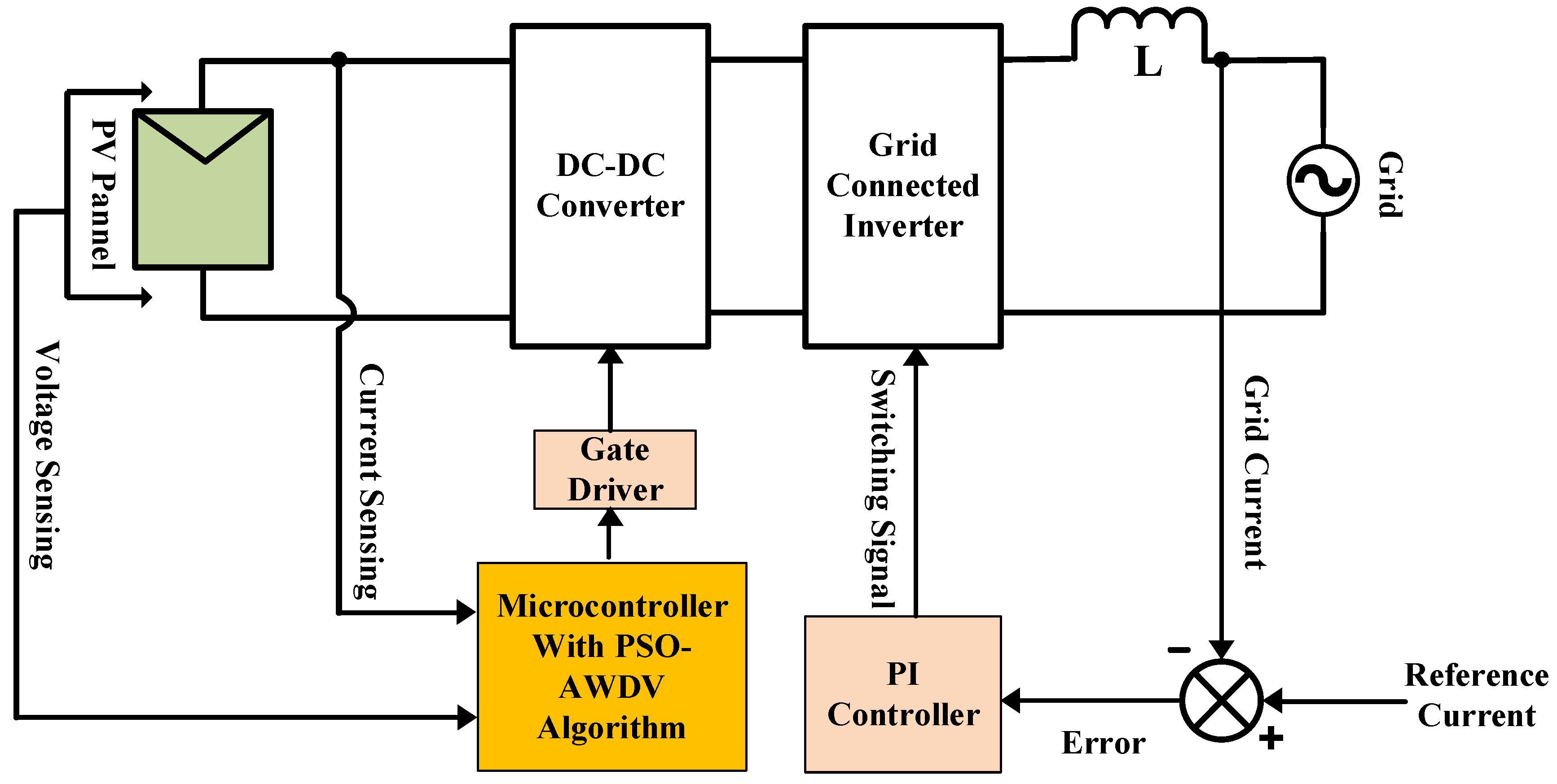
10. Grid Connected Inverter System
11. Conclusions
- The ability to track time was significantly improved.
- A decrease in power output variations.
- Robustness (performance that remains constant under varying circumstances).
- Reduced oscillations.
- Increased efficiency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Husain, M.A.; Tariq, A.; Hameed, S.; Bin Arif, M.S.; Jain, A. Comparative assessment of maximum power point tracking procedures for photovoltaic systems. Green Energy Environ. 2017, 2, 5–17. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Khodadadi, N.; Mirjalili, S. Mountain Gazelle Optimizer: A New Nature-inspired Metaheuristic Algorithm for Global Optimization Problems. Adv. Eng. Softw. 2022, 174, 103282. [Google Scholar] [CrossRef]
- Sadeeq, H.T.; Abdulazeez, A.M. Giant Trevally Optimizer (GTO): A Novel Metaheuristic Algorithm for Global Optimization and Challenging Engineering Problems. IEEE Access 2022, 10, 121615–121640. [Google Scholar] [CrossRef]
- Alanazi, A.; Alanazi, M.; Arabi, S.; Sarker, S. A New Maximum Power Point Tracking Framework for Photovoltaic Energy Systems Based on Remora Optimization Algorithm in Partial Shading Conditions. Appl. Sci. 2022, 12, 3828. [Google Scholar] [CrossRef]
- Zhu, W.; Shang, L.; Li, P.; Guo, H. Modified hill climbing MPPT algorithm with reduced steady-state oscillation and improved tracking efficiency. J. Eng. 2018, 2018, 1878–1883. [Google Scholar] [CrossRef]
- Nejila, V.P.; Selvakumar, A.I. Fuzzy-logic based hill-climbing method for maximum power point tracking in PV systems. In Proceedings of the 2013 International Conference Power, Energy Control, ICPEC 2013, Dindigul, India, 6–8 February 2013; pp. 8–13. [Google Scholar]
- Hohm, D.P.; Ropp, M.E. Comparative study of maximum power point tracking algorithms. Prog. Photovolt. Res. Appl. 2003, 11, 47–62. [Google Scholar] [CrossRef]
- Osman, M.H.; Ahmed, M.K.; Refaat, A.; Korovkin, N.V. A Comparative Study of MPPT for PV System Based on Modified Perturbation & Observation Method. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg/Moscow, Russia, 26–29 January 2021. [Google Scholar]
- Eltamaly, A.M.; Al-Saud, M.S.; Abokhalil, A.G.; Farh, H.M.H. Simulation and experimental validation of fast adaptive particle swarm optimization strategy for photovoltaic global peak tracker under dynamic partial shading. Renew. Sustain. Energy Rev. 2020, 124, 109719. [Google Scholar] [CrossRef]
- Balamurugan, M.; Narendiran, S.; Sahoo, S.K.; Das, R.; Sahoo, A.K. Application of particle swarm optimization for maximum power point tracking in PV system. In Proceedings of the 2016 3rd International Conference on Electrical Energy Systems (ICEES), Chennai, India, 17–19 March 2016; pp. 35–38. [Google Scholar]
- Gupta, A.; Kumar, P.; Pachauri, R.K.; Chauhan, Y.K. Performance Analysis of Neural Network and Fuzzy Logic Based MPPT Techniques for Solar PV Systems. In Proceedings of the 2014 6th IEEE Power India International Conference (PIICON), Delhi, India, 5–7 December 2014; pp. 1–6. [Google Scholar]
- Kumar, V.; Kumar, P.; Srinivasa, S.; Puranik, C.R. Study the Effect of Partial Shading in Solar Photovoltaic System. Int. J. Eng. Res. Technol. IJERT 2019, 7, 1–5. [Google Scholar]
- Pervez, I.; Pervez, A.; Tariq, M.; Sarwar, A.; Chakrabortty, R.K.; Ryan, M.J. Rapid and Robust Adaptive Jaya (Ajaya) Based Maximum Power Point Tracking of a PV-Based Generation System. IEEE Access 2021, 9, 48679–48703. [Google Scholar] [CrossRef]
- Megantoro, P.; Nugroho, Y.D.; Anggara, F.; Rusadi, E.Y. Simulation and Characterization of Genetic Algorithm Implemented on MPPT for PV System under Partial Shading Condition. In Proceedings of the 2018 3rd International Conference on Information Technology, Information System and Electrical Engineering (ICITISEE), Yogyakarta, Indonesia, 13–14 November 2018; pp. 74–78. [Google Scholar]
- Sarvi, M.; Azadian, A. A comprehensive review and classified comparison of MPPT algorithms in PV systems. Energy Syst. 2021, 13, 281–320. [Google Scholar] [CrossRef]
- Sheraz, M.; Abido, M.A. An Efficient MPPT controller Using Differential Evolution and Neural Network. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 2–5. [Google Scholar]
- Sagonda, A.F.; Folly, K.A. A comparative study between deterministic and two meta-heuristic algorithms for solar PV MPPT control under partial shading conditions. In Power Electronics Handbook; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Devarakonda, A.K.; Karuppiah, N.; Selvaraj, T.; Balachandran, P.K.; Shanmugasundaram, R.; Senjyu, T. A Comparative Analysis of Maximum Power Point Techniques for Solar Photovoltaic Systems. Energies 2022, 15, 8776. [Google Scholar] [CrossRef]
- Harrison, A.; Alombah, N.H.; de Dieu Nguimfack Ndongmo, J. A New Hybrid MPPT Based on Incremental Conductance-Integral Backstepping Controller Applied to a PV System under Fast-Changing Operating Conditions. Hindawi Int. J. Photoenergy 2023, 2023, 9931481. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F.; Bhaskar, M.S. An Experimental Estimation of Hybrid ANFIS–PSO- Based MPPT for PV Grid Integration Under Fluctuating Sun Irradiance. IEEE Syst. J. 2020, 14, 1218–1229. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Bhaskar, M.S.; Blaabjerg, F.; Holm-Nielsen, J.B.; Azam, F.; Sharma, A.K. A Hybrid Photovoltaic-Fuel Cell-Based Single Stage Grid Integration with Lyapunov Control Scheme. IEEE Syst. J. 2019, 14, 3334–3342. [Google Scholar] [CrossRef]
- Sajid, I.; Gautam, A.; Sarwar, A.; Tariq, M.; Liu, H.-D.; Ahmad, S.; Lin, C.-H.; Sayed, A.E. Optimizing Photovoltaic Power Production in Partial Shading Conditions Using Dandelion Optimizer (DO)-Based MPPT Method. Processes 2023, 11, 2493. [Google Scholar] [CrossRef]
- Moayedi, H.; Rezaei, A. The feasibility of PSO–ANFIS in estimating bearing capacity of strip foundations rested on cohesionless slope. Neural. Comput. Appl. 2021, 33, 4165–4177. [Google Scholar] [CrossRef]
- Jasim, S.S.; Abdul Hassan, A.K.; Turner, S. Driver Drowsiness Detection Using Gray Wolf Optimizer Based on Face and Eye Tracking. Aro-Sci. J. Koya Univ. 2022, 10, 49–56. [Google Scholar] [CrossRef]
- Ali, K.; Khan, Q.; Ullah, S.; Khan, I.; Khan, L. Nonlinear robust integral backstepping based MPPT control for stand-alone photovoltaic system. PLoS ONE 2020, 15, e0231749. [Google Scholar] [CrossRef] [PubMed]
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J.-S. Backstepping Based Super-Twisting Sliding Mode MPPT Control with Differential Flatness Oriented Observer Design for Photovoltaic System. Electronics 2020, 9, 1543. [Google Scholar] [CrossRef]
- Ali, K.; Khan, L.; Khan, Q.; Ullah, S.; Ali, N. Neurofuzzy robust backstepping based MPPT control for photovoltaic system. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, Article 27. [Google Scholar] [CrossRef]
- Raiker, G.A.; Loganathan, U.; Reddy, S.B. Current Control of Boost Converter for PV Interface With Momentum-Based Perturb and Observe MPPT. IEEE Trans. Ind. Appl. 2021, 57, 4071–4079. [Google Scholar] [CrossRef]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef]
- Bharath, K.R.; Suresh, E. Design and Implementation of Improved Fractional Open Circuit Voltage Based Maximum Power Point Tracking Algorithm for Photovoltaic Applications. Intern. J. Renew. Energy Res. IJRER 2017, 7, 1108–1113. [Google Scholar]
- Zaghba, L.; Khennane, M.; Borni, A.; Fezzani, A. Intelligent PSO-Fuzzy MPPT approach for Stand Alone PV System under Real Outdoor Weather Conditions. Alger. J. Renew. Energy Sustain. Dev. 2021, 3, 1–12. [Google Scholar] [CrossRef]
- Rajalashmi, C.K.; Monisha, C. Maximum Power Point Tracking Using Ant Colony Optimization for Photovoltaic System Under Partially Shaded Conditions. Int. J. Eng. Adv. Technol. IJEAT 2018, 8, 82–87. [Google Scholar]
- Mirza, A.F.; Mansoor, M.; Ling, Q.; Yin, B.; Javed, M.Y. A Salp-Swarm Optimization based MPPT technique for harvesting maximum energy from PV systems under partial shading conditions. Energy Convers. Manag. 2020, 209, 112625. [Google Scholar] [CrossRef]
- Singh, N.; Gupta, K.K.; Jain, S.K.; Dewangan, N.K.; Bhatnagar, P. A Flying Squirrel Search Optimization for MPPT Under Partial Shaded Photovoltaic System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4963–4978. [Google Scholar] [CrossRef]
- Altamimi, S.N.; Feilat, E.A.; al Nadi, D.A. Maximum Power Point Tracking Technique Using Combined Incremental Conductance and Owl Search Algorithm. In Proceedings of the 2021 12th International Renewable Engineering Conference (IREC), Amman, Jordan, 14–15 April 2021; pp. 1–6. [Google Scholar]
- Farzaneh, J.; Keypour, R.; Khanesar, M.A. A New Maximum Power Point Tracking Based on Modified Firefly Algorithm for PV System Under Partial Shading Conditions. Technol. Econ. Smart Grids Sustain. Energy 2018, 3, 9. [Google Scholar] [CrossRef]
- Sutikno, T.; Subrata, A.C.; Elkhateb, A. Evaluation of Fuzzy Membership Function Effects for Maximum Power Point Tracking Technique of Photovoltaic System. IEEE Access 2021, 9, 109157–109165. [Google Scholar] [CrossRef]
- Azad, M.L.; Das, S.; Sadhu, P.K.; Arvind, P. High-Performance Algorithms to Ascertain The Power Generation In A Photovoltaic System Using Fuzzy Logic Controller. In Proceedings of the 2020 International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 17–19 June 2020; pp. 425–430. [Google Scholar]
- Raj, A.; Gupta, M. Numerical Simulation and Performance Assessment of ANN-INC Improved Maximum Power Point Tracking System for Solar Photovoltaic System Under Changing Irradiation Operation. Ann. RSCB 2021, 25, 790–797. [Google Scholar]
- Chao, K.-H.; Rizal, M. A Hybrid MPPT Controller Based on the Genetic Algorithm and Ant Colony Optimization for Photovoltaic Systems under Partially Shaded Conditions. Energies 2021, 14, 2902. [Google Scholar] [CrossRef]
- Babu, K.G.; Kishori, K.R. MPPT design using grey wolf optimization differential evolution (GWODE) technique for partially shaded PV system. Int. J. Emerg. Technol. Innov. Res. 2018, 5, 203–218. [Google Scholar]
- Bhuvaneswari, G.; Annamalai, R. Development of a solar cell model in MATLAB for PV based generation system. In Proceedings of the 2011 Annual IEEE India Conference Sustainable Engineering Solutions INDICON-2011, Hyderabad, India, 16–18 December 2011. [Google Scholar]
- Asim, M.; Tariq, A.; Tariq, M. Simulink based modeling, simulation and performance evaluation of an MPPT for maximum power generation on resistive load. In Proceedings of the 2011 2nd International Conference on Environmental Science and Technology, Singapore, 26–28 February 2011; IPCBEE: Singapore, 2011. [Google Scholar]
- Magdaleno, R.S.; Sánchez-Pérez, P.A.; Cruz, J.R.; Escobar, D.M.; Sánchez-Juárez, A. Influence of partial shading on the power output of a solar cell and a PV module. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 1324–1327. [Google Scholar]
- Ramaprabha, R.; Mathur, B.L. Characteristics of solar PV array under partial shaded conditions. In Proceedings of the TENCON 2008 IEEE Region 10 Conference, Hyderabad, India, 19–21 November 2008. [Google Scholar]
- Liu, Y.-H.; Huang, S.-C.; Huang, J.-W.; Liang, W.-C. A Particle Swarm Optimization-Based Maximum Power Point Tracking Algorithm for PV Systems Operating Under Partially Shaded Conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Koad, R.B.A.; Zobaa, A.; El-Shahat, A. A Novel MPPT Algorithm Based on Particle Swarm Optimization for Photovoltaic Systems. IEEE Trans. Sustain. Energy 2016, 8, 468–476. [Google Scholar] [CrossRef]
- Xu, L.; Song, B.; Cao, M. An improved particle swarm optimization algorithm with adaptive weighted delay velocity. Syst. Sci. Control Eng. 2021, 9, 188–197. [Google Scholar] [CrossRef]
- Ratnaweera, A.; Halgamure, S.K.; Watson, H.C. Self-organizing herarchical particle swarm optimizer with time-varying acceleration coefficients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Strategies Involved | DC–DC Converter | Findings/Remarks |
|---|---|---|---|
| [8] | Scales that are conventional, two steps in size, and changeable steps P&O | Boost Converter |
|
| [28] | Combining voltage-directed current regulation with momentum-based P&O | Boost Converter |
|
| [29] | FOCV strategies using semi-pilot cells (SPC) and semi-pilot panels (SPP) | Buck–Boost converter |
|
| [30] | Improved FOCV technique | Buck Converter |
|
| [31] | PSO + FLC MPPT | Boost converter |
|
| [32] | New pheromone update-based ant colony optimization (ACO-NPU) | Buck–Boost converter |
|
| [33] | SSO MPPT strategy | Buck–Boost converter |
|
| [34] | FSSO MPPT strategy | Quasi-Z-source Converter |
|
| [35] | OSA+ INC MPPT strategy | Boost converter |
|
| [36] | Modified FA MPPT method | Boost Converter |
|
| [37] | Generalized Bell (GBell) membership function + FLC MPPT approach | High gain voltage DC–DC converter |
|
| [38] | Fuzzy-based Strategy | Boost converter |
|
| [39] | Feed-forward weight update combined with the INC training technique | Boost converter |
|
| [40] | GA + ACO | Boost converter |
|
| [41] | Strategies using Whale Optimization (WO) and DE MPPT | Boost Converter |
|
| Parameter | Value |
|---|---|
| Number of PV modules in series | 4 |
| ) | 5.34 A |
| PV cells per module | 72 |
| ) | 5.425 V |
| ) | 5.02 A |
| 4.35 V | |
| ) | 21.837 W |
| in %/°C | −0.37501 |
| in %/°C | 0.075 |
| ) | |||||
|---|---|---|---|---|---|
| Condition | Rated Power | ||||
| 1 | 1000 | 1000 | 1000 | 1000 | 87.26 Watt |
| 2 | 1000 | 900 | 600 | 400 | 41.29 Watt |
| 3 | 1000 | 800 | 750 | 500 | 49.67 Watt |
| 4 | 1000 | 800 | 500 | 300 | 34.76 Watt |
| 5 | 900 | 800 | 500 | 400 | 39.69 Watt |
| Parameter | Value |
|---|---|
| The temperature at standard test condition (TSTC) | 298.15 K |
| Standard irradiance for testing purposes (GSTC) | 1000 W/m2 |
| Number of PV modules linked in series | 4 |
| PV cells per module | 36 |
| ) | 7.91 Amperes |
| ) | 21.6 Volts |
| ) | 7.4 Amperes |
| 16.93 Volts | |
| ) | 125.282 Watts |
| in %/°C | −0.35602 |
| in %/°C | 0.07 |
| ) | |||||
|---|---|---|---|---|---|
| Condition | Rated Power | ||||
| 1 | 1000 | 1000 | 1000 | 1000 | 87.26 Watt |
| 2 | 1000 | 1000 | 1000 | 600 | 61.45 Watt |
| 3 | 1000 | 700 | 400 | 300 | 30.04 Watt |
| 4 | 1000 | 800 | 650 | 400 | 43.98 Watt |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azad, M.A.; Tariq, M.; Sarwar, A.; Sajid, I.; Ahmad, S.; Bakhsh, F.I.; Sayed, A.E. A Particle Swarm Optimization–Adaptive Weighted Delay Velocity-Based Fast-Converging Maximum Power Point Tracking Algorithm for Solar PV Generation System. Sustainability 2023, 15, 15335. https://doi.org/10.3390/su152115335
Azad MA, Tariq M, Sarwar A, Sajid I, Ahmad S, Bakhsh FI, Sayed AE. A Particle Swarm Optimization–Adaptive Weighted Delay Velocity-Based Fast-Converging Maximum Power Point Tracking Algorithm for Solar PV Generation System. Sustainability. 2023; 15(21):15335. https://doi.org/10.3390/su152115335
Chicago/Turabian StyleAzad, Md Adil, Mohd Tariq, Adil Sarwar, Injila Sajid, Shafiq Ahmad, Farhad Ilahi Bakhsh, and Abdelaty Edrees Sayed. 2023. "A Particle Swarm Optimization–Adaptive Weighted Delay Velocity-Based Fast-Converging Maximum Power Point Tracking Algorithm for Solar PV Generation System" Sustainability 15, no. 21: 15335. https://doi.org/10.3390/su152115335
APA StyleAzad, M. A., Tariq, M., Sarwar, A., Sajid, I., Ahmad, S., Bakhsh, F. I., & Sayed, A. E. (2023). A Particle Swarm Optimization–Adaptive Weighted Delay Velocity-Based Fast-Converging Maximum Power Point Tracking Algorithm for Solar PV Generation System. Sustainability, 15(21), 15335. https://doi.org/10.3390/su152115335