
Research on Distributed Energy Storage Planning-Scheduling Strategy of Regional Power Grid Considering Demand Response


Abstract
:1. Introduction
2. Carbon Emission Cost Model
2.1. Carbon Emission Quota Model
2.2. CEA Transaction Costs
2.3. CCER Transaction Costs
3. Optimal Allocation Model of Distributed Energy Storage
3.1. Objective Function
3.1.1. Energy Storage Cost
3.1.2. Distribution Network Operation Cost
3.1.3. The Punishment of Ladder New Energy Abandonment
3.1.4. Carbon Emission Efficiency
3.2. Constraint Condition
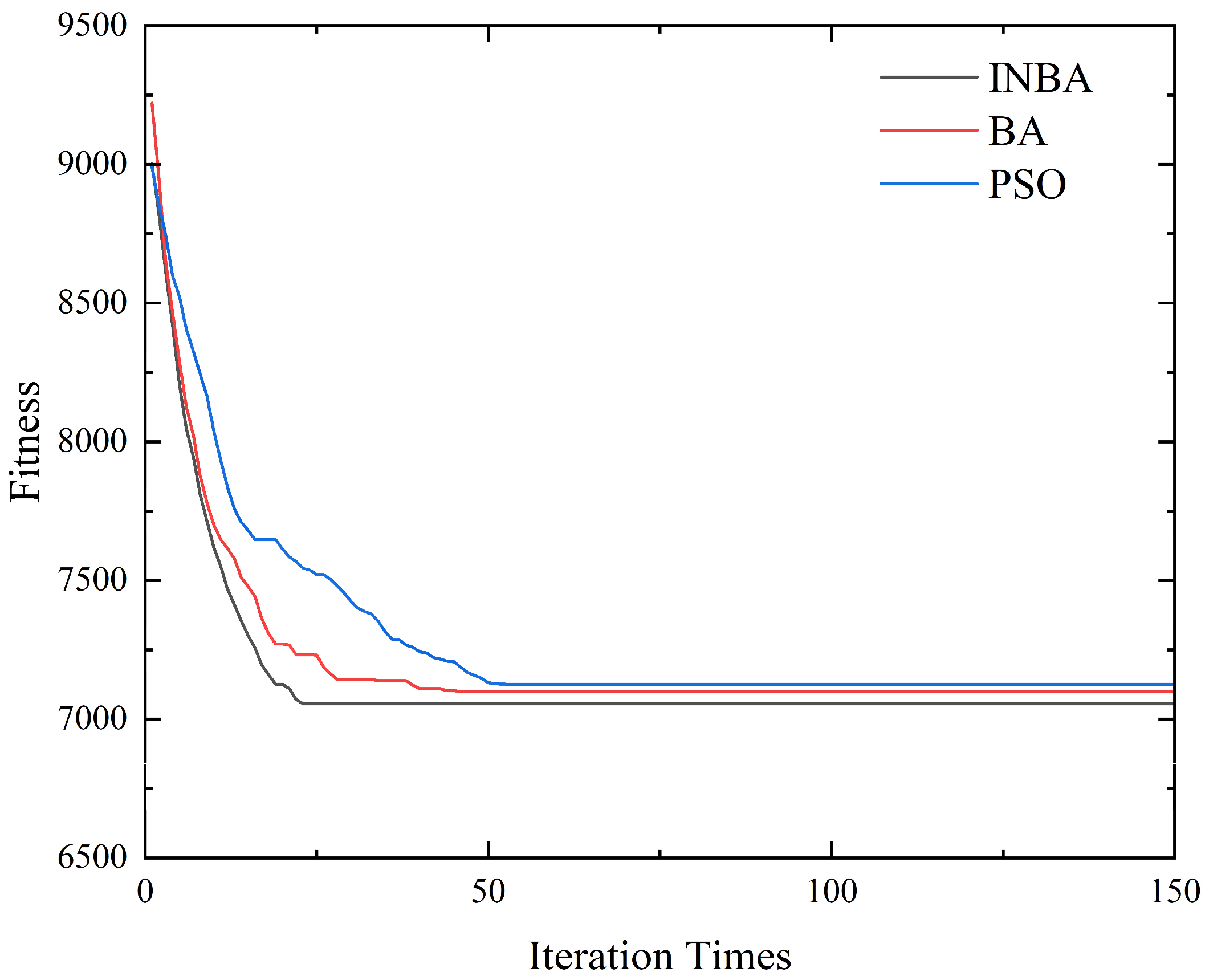
4. Solution Method
4.1. Improved Bat Algorithm Principle
4.2. Algorithm Implementation Steps
5. Example Analysis
5.1. Example Setting
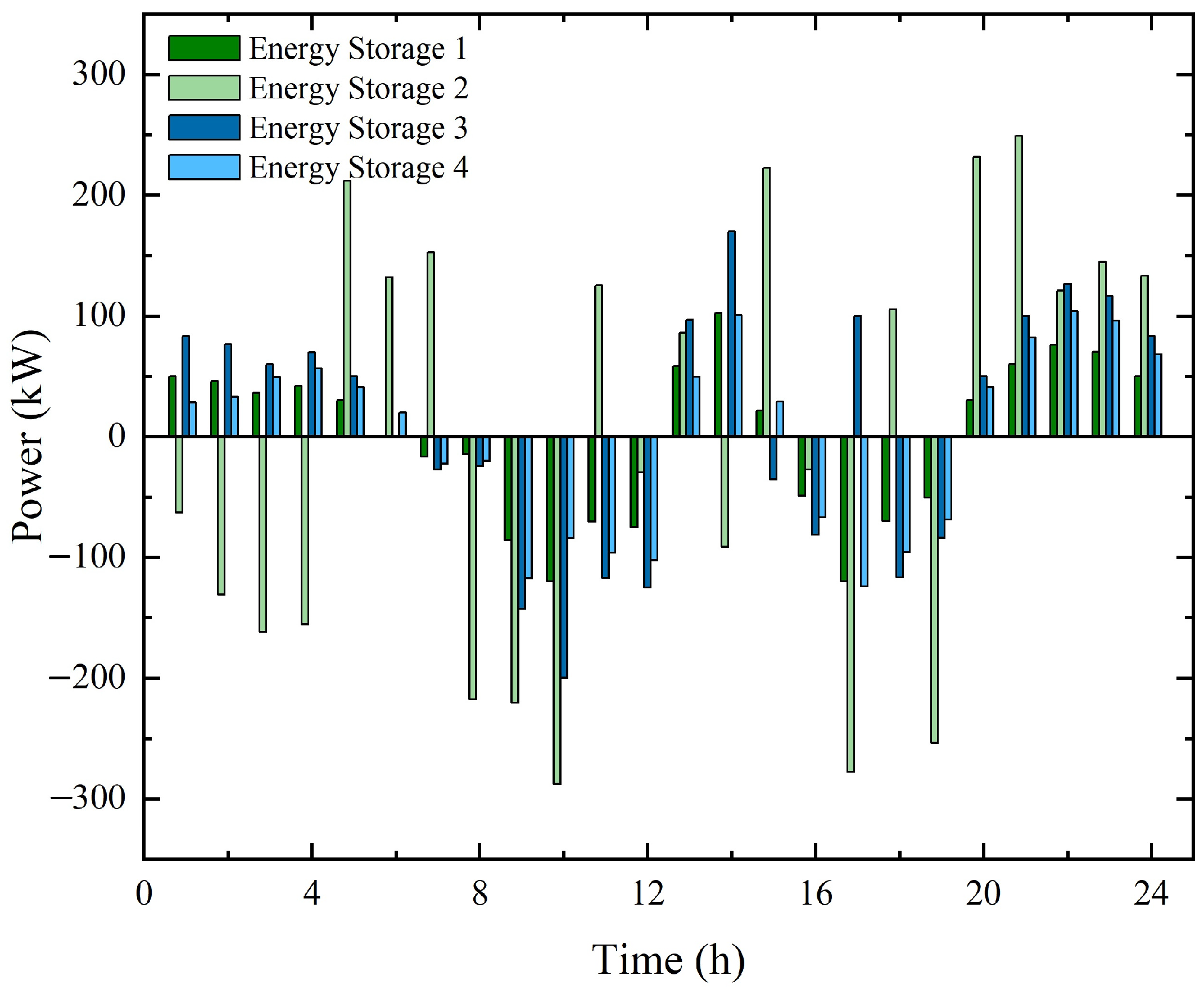
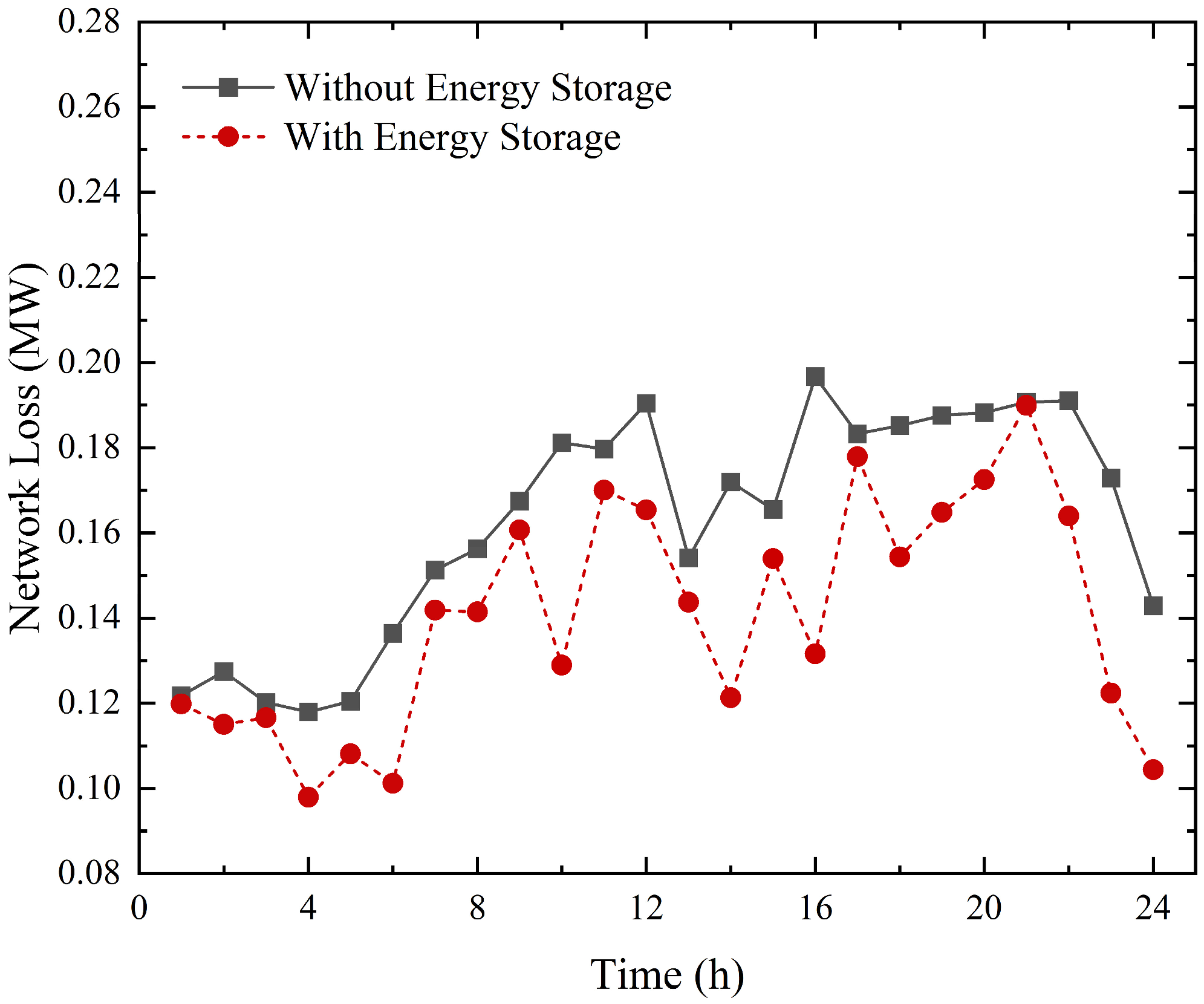
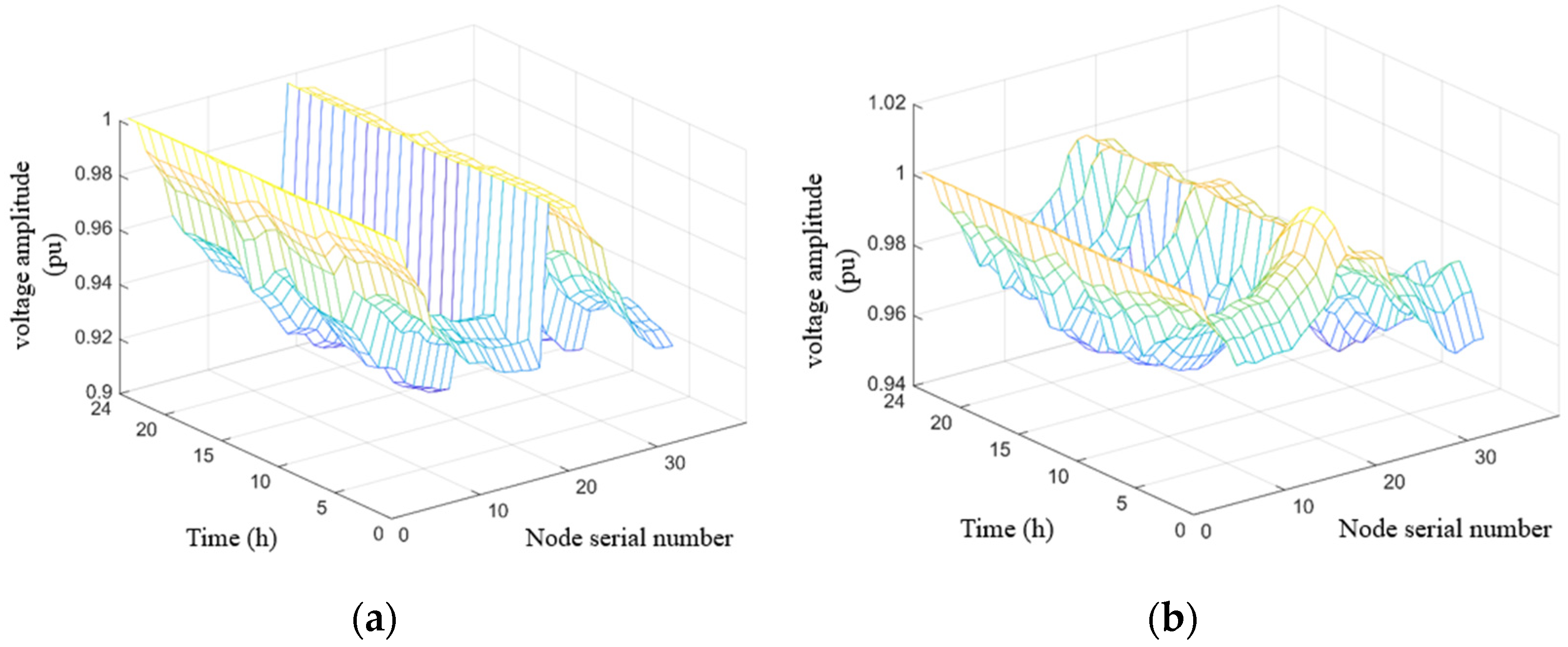
5.2. Results Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Legrand, M.; Labajo-Hurtado, R.; Rodríguez-Antón, L.M.; Doce, Y. Price arbitrage optimization of a photovoltaic power plant with liquid air energy storage. Implementation to the Spanish case. Energy 2022, 239, 121957. [Google Scholar] [CrossRef]
- Wolf-Dieter, S. Thermo-mechanical concepts for bulk energy storage. Renew. Sustain. Energy Rev. 2017, 75, 205–219. [Google Scholar]
- Yafei, L. Distributed Energy Storage Optimal Allocation and Life Cycle Economic Evaluation Method in Distribution Network; Southeast University: Nanjing, China, 2019. [Google Scholar]
- Changqing, C.; Xinran, L.I.; Zhang, B. Energy storage peak and frequency modulation cooperative control strategy based on multi-time-scale. Power Syst. Prot. Control 2022, 50, 94–105. [Google Scholar]
- Sun, W.; Song, H.; Qin, Y.; Li, H. Energy Storage System Optimal Allocation Considering Flexibility Supply and Demand Uncertainty. Power Syst. Technol. 2020, 44, 4486–4497. [Google Scholar]
- Wang, Y.; Zheng, Y.; Xue, H.; Mi, Y. Optimal dispatch of mobile energy storage for peak load shifting based on enhanced firework algorithm. Autom. Electr. Power Syst. 2021, 45, 48–56. [Google Scholar]
- Pulazza, G.; Zhang, N.; Kang, C.; Nucci, C.A. Transmission Planning with Battery-based Energy Storage Transportation for Power Systems with High Penetration of Renewable Energy. IEEE Trans. Power Syst. 2021, 36, 4928–4940. [Google Scholar] [CrossRef]
- Shi, Z.; Wang, W.; Huang, Y.; Li, P.; Dong, L. Simultaneous Optimization of Renewable Energy and Energy Storage Capacity with the Hierarchical Control. CSEE J. Power Energy Syst. 2022, 8, 95–104. [Google Scholar]
- Sedghi, M.; Ahmadian, A.; Aliakbar-Golkar, M. Optimal Storage Planning in Active Distribution Network Considering Uncertainty of Wind Power Distributed Generation. IEEE Trans. Power Syst. 2015, 31, 304–316. [Google Scholar] [CrossRef]
- Tang, X.; Deng, K.; Wu, Q.; Feng, Y. Optimal Location and Capacity of the Distributed Energy Storage System in a Distribution Network. IEEE Access 2020, 8, 15576–15578. [Google Scholar] [CrossRef]
- Tao, Q.; Sang, B.; Ye, J.; Xue, J. Optimal Configuration Method of Distributed Energy Storage Systems in Distribution Network with High Penetration of Photovoltaic. High Volt. Eng. 2016, 42, 2158–2165. [Google Scholar]
- Cai, F.; Hu, Z.; Cao, M.; Cai, D.; Chen, R.; Sun, G. Coordinated planning of centralized and dis-tributed battery energy storage for improving renewable energy accommodation capability. Autom. Electr. Power Syst. 2022, 46, 23–32. [Google Scholar]
- Yang, P.; Nehorai, A. Joint Optimization of Hybrid Energy Storage and Generation Capacity with Renewable Energy. IEEE Trans. Smart Grid 2014, 5, 1566–1574. [Google Scholar] [CrossRef]
- Guo, Z.; Wei, W.; Chen, L.; Dong, Z.Y.; Mei, S. Impact of Energy Storage on Renewable Energy Utilization: A Geometric Description. IEEE Trans. Sustain. Energy 2021, 12, 874–885. [Google Scholar] [CrossRef]
- Yang, Y.; Zheng, P.; Mao, R.; Qin, H.; Wang, Y. Islanded Microgrid Economic Dispatch Based on Segmented Quantization of Uncertainty Margin and Segmented Penalty of Curtailed Wind and Solar Power. Mod. Electr. Power 2023, 40, 73–81. [Google Scholar]
- Yang, X. A new metaheuristic bat-inspired algorithm. Nat. Inspired Coop. Strategies Optim. 2010, 284, 65–74. [Google Scholar]
- Han, Y.; Yu, S.; Li, L.; Hou, Y.; Li, Q.; Chen, W. Low-carbon and Economic Configuration Method for Solar Hydrogen Storage Microgrid Including Stepped Carbon Trading. High Volt. Eng. 2022, 48, 2523–2533. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Electricity Sales Price/(yuan·kWh−1) | Electricity Purchase Price/(yuan·kWh−1) |
|---|---|---|
| 00:00–08:00 23:00–24:00 | 0.28 | 0.37 |
| 12:00–15:00 19:00–23:00 | 0.53 | 0.69 |
| 08:00–12:00 15:00–19:00 | 0.72 | 0.87 |
| Parameter | Numerical Value |
|---|---|
| 20 | |
| 500 | |
| 0 | |
| [1, 2] | |
| 0.9 | |
| [0, 1] | |
| 1.5 | |
| 0.5 | |
| 0.9 | |
| 0.4 |
| Energy Storage | Allocation Node | Rated Capacity/kWh | Nominal Power/kVA |
|---|---|---|---|
| 1 | 22 | 400 | 200 |
| 2 | 2 | 676 | 300 |
| 3 | 18 | 666 | 200 |
| 4 | 33 | 547 | 200 |
| Scheme | Whether to Allocate Energy Storage | Whether to Participate in DR | New Energy Consumption/kW·h | New Energy Waste /kW·h | New Energy Accommodation |
|---|---|---|---|---|---|
| 1 | No | No | 3930.91 | 3115.89 | 55.77% |
| 2 | No | Yes | 4533.21 | 2513.59 | 64.33% |
| 3 | Yes | No | 5827 | 1219.8 | 82.69% |
| 4 | Yes | Yes | 6445.78 | 601.02 | 91.47% |
| Scheme | Capitalized Cost/yuan | Operation and Maintenance Cost/yuan | New Energy Abandonment Cost/yuan | Network Loss Cost/yuan | Carbon Trading Cost/yuan | Total Cost/yuan |
|---|---|---|---|---|---|---|
| 1 | 1383.7 | 137 | 1390 | 2570.2 | 2490.7 | 7971.6 |
| 2 | 1383.7 | 137 | 1159.7 | 2536.4 | 2388.7 | 7605.5 |
| 3 | 2248.4 | 163.6 | 627.8 | 2444.3 | 2280.3 | 7764.4 |
| 4 | 2248.4 | 163.6 | 308.5 | 2240.5 | 2114.9 | 7075.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rao, Y.; Cui, X.; Zou, X.; Ying, L.; Tong, P.; Li, J. Research on Distributed Energy Storage Planning-Scheduling Strategy of Regional Power Grid Considering Demand Response. Sustainability 2023, 15, 14540. https://doi.org/10.3390/su151914540
Rao Y, Cui X, Zou X, Ying L, Tong P, Li J. Research on Distributed Energy Storage Planning-Scheduling Strategy of Regional Power Grid Considering Demand Response. Sustainability. 2023; 15(19):14540. https://doi.org/10.3390/su151914540
Chicago/Turabian StyleRao, Yunjie, Xue Cui, Xuyue Zou, Liming Ying, Pingzheng Tong, and Junlin Li. 2023. "Research on Distributed Energy Storage Planning-Scheduling Strategy of Regional Power Grid Considering Demand Response" Sustainability 15, no. 19: 14540. https://doi.org/10.3390/su151914540
APA StyleRao, Y., Cui, X., Zou, X., Ying, L., Tong, P., & Li, J. (2023). Research on Distributed Energy Storage Planning-Scheduling Strategy of Regional Power Grid Considering Demand Response. Sustainability, 15(19), 14540. https://doi.org/10.3390/su151914540