
Two-Stage Grid-Connected Frequency Regulation Control Strategy Based on Photovoltaic Power Prediction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
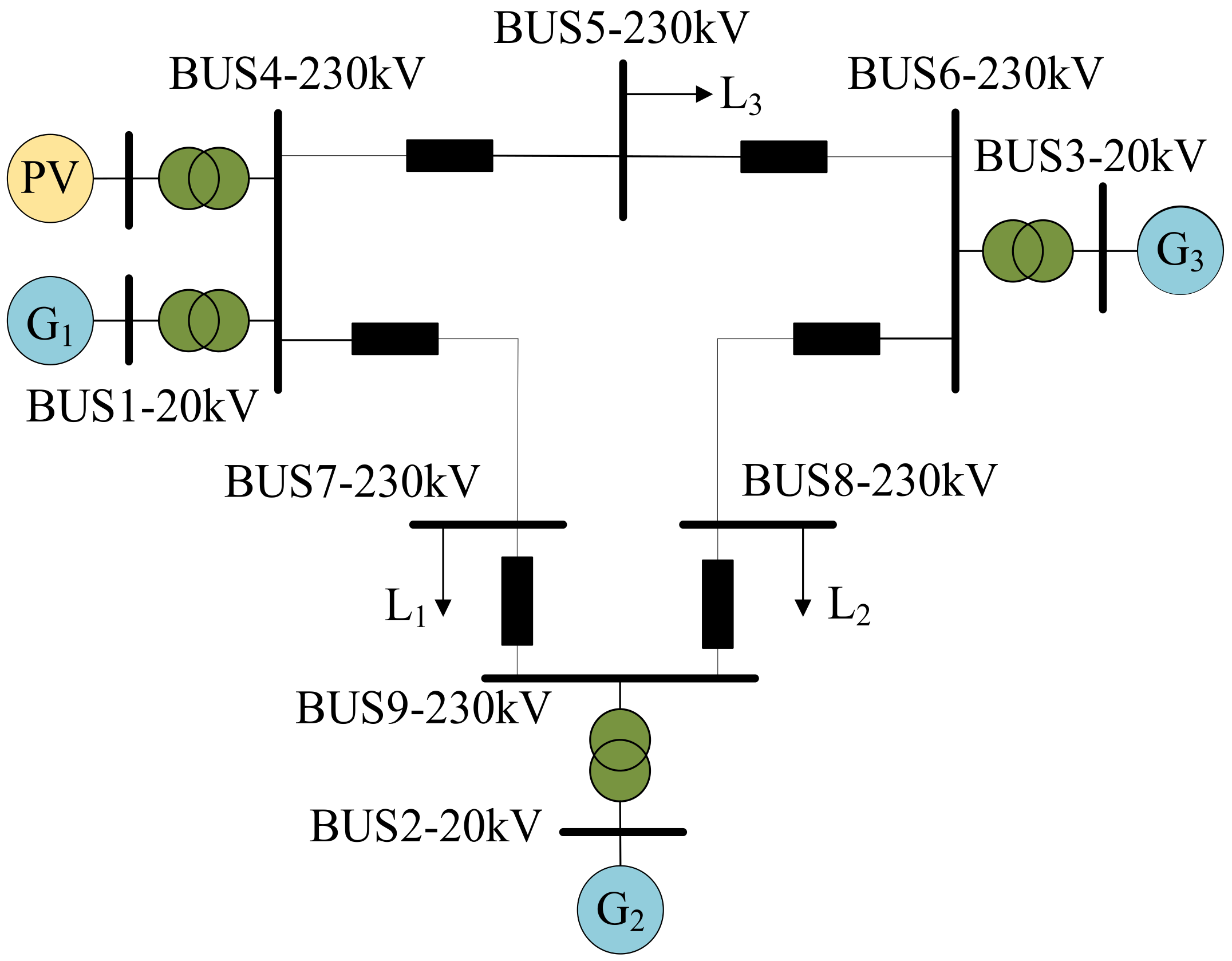
2. System Topology and General Control Strategy
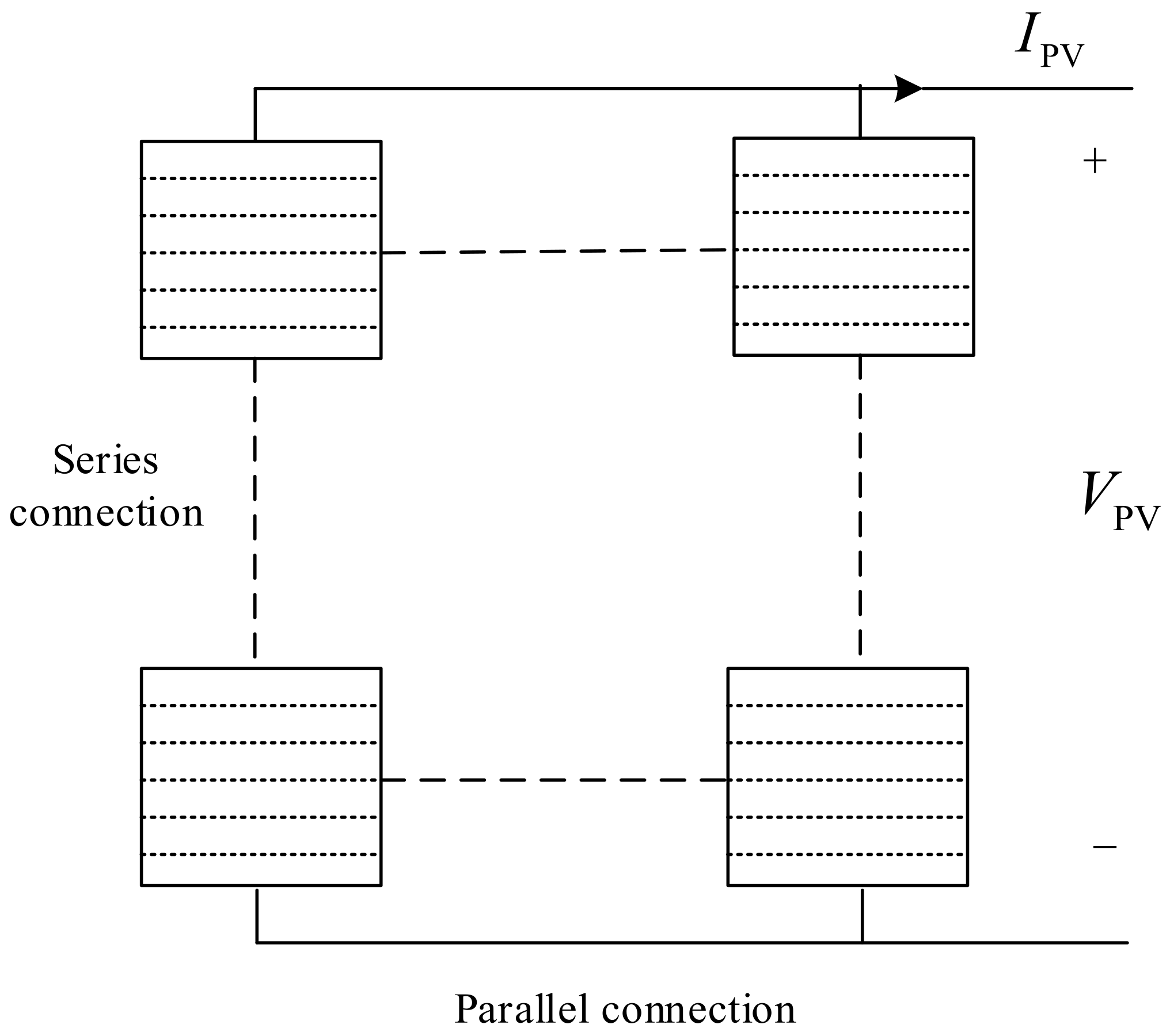
2.1. Photovoltaic Array Structure
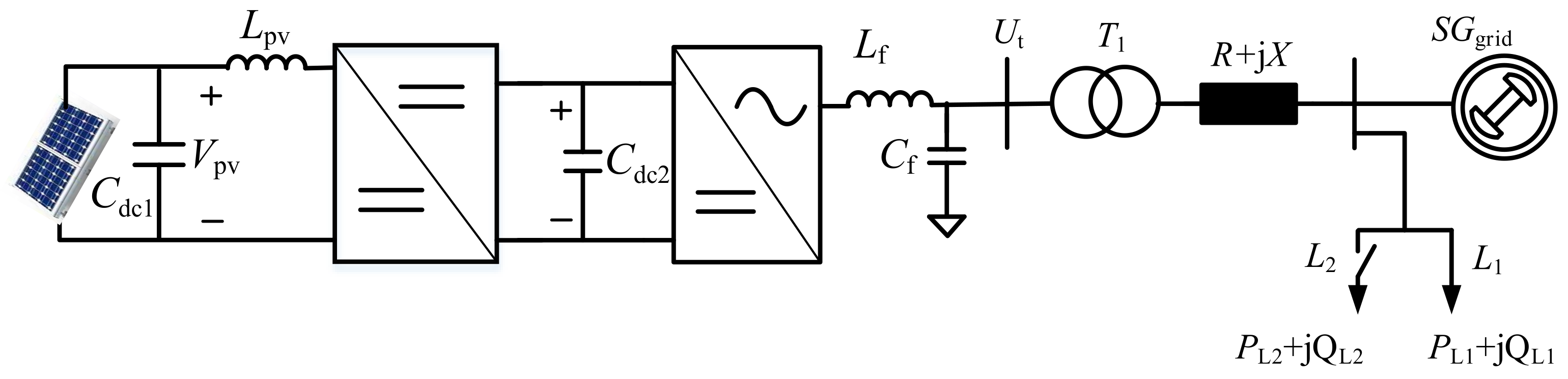
2.2. Two-Stage Photovoltaic Power System Structure
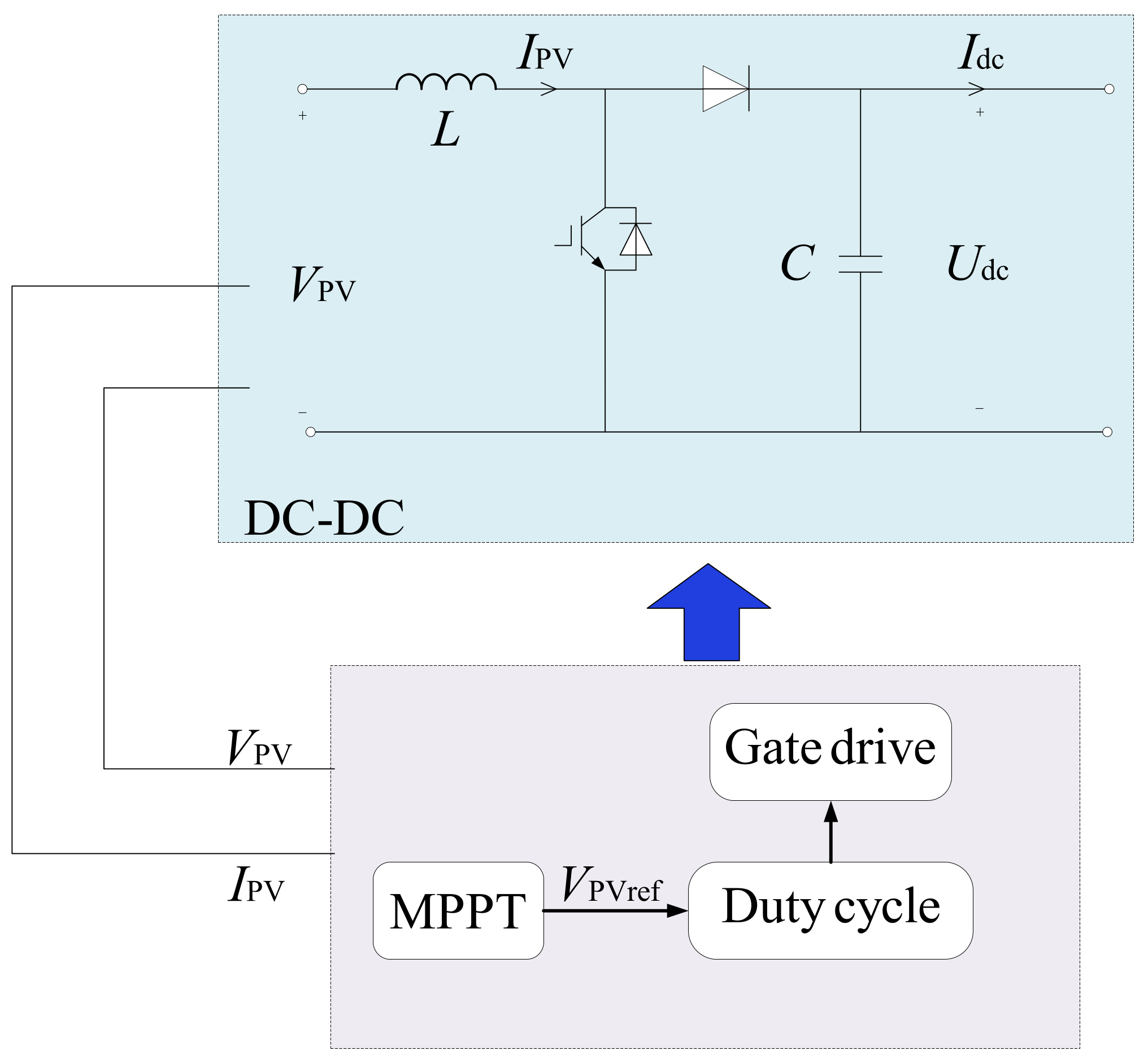
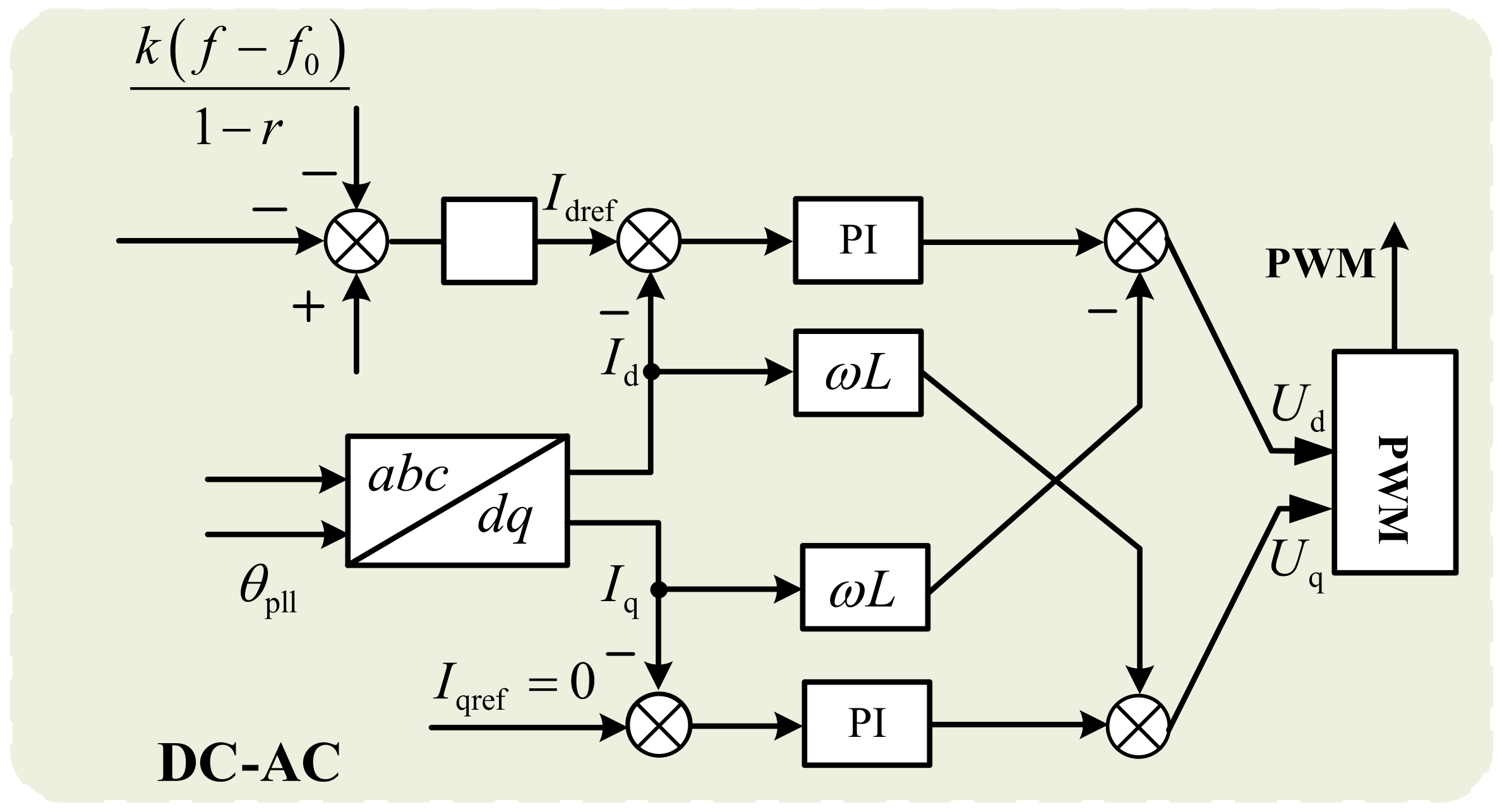
2.3. Conventional Control for Boost Converter
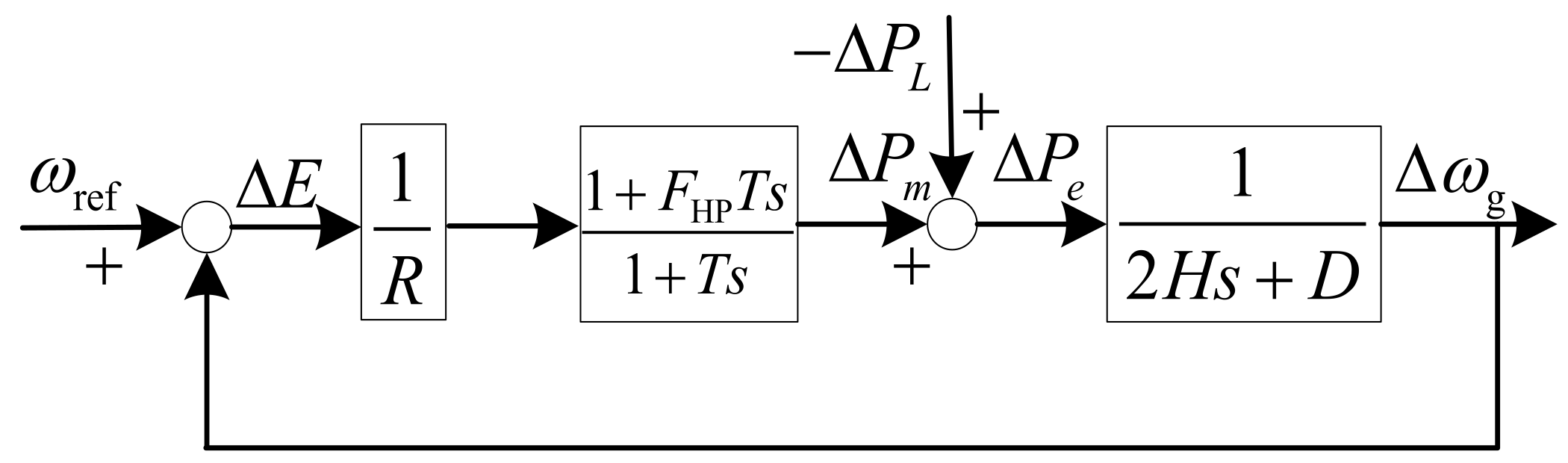
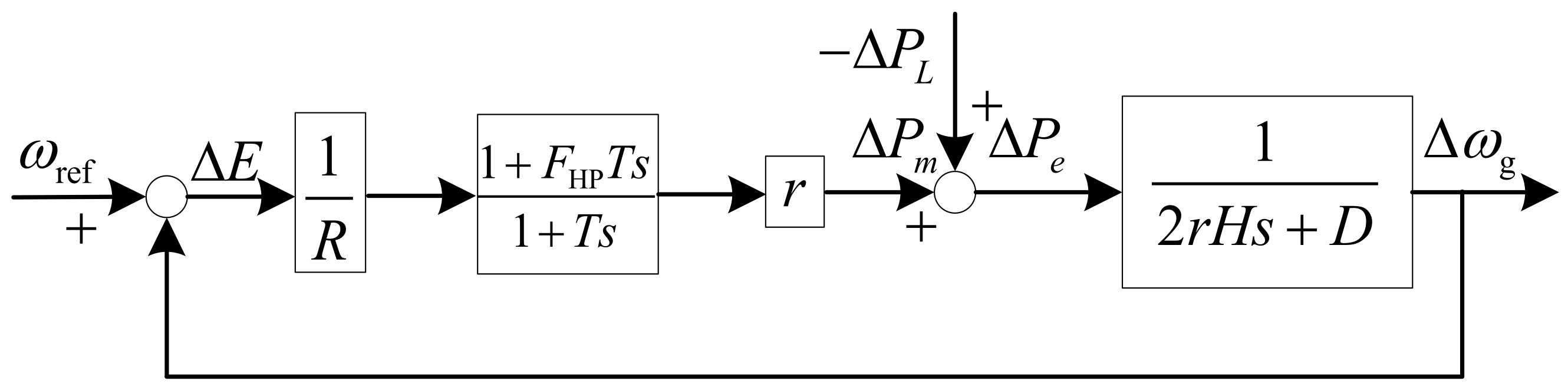
3. Dynamic Characteristics of Grid Frequencies under PV Penetration
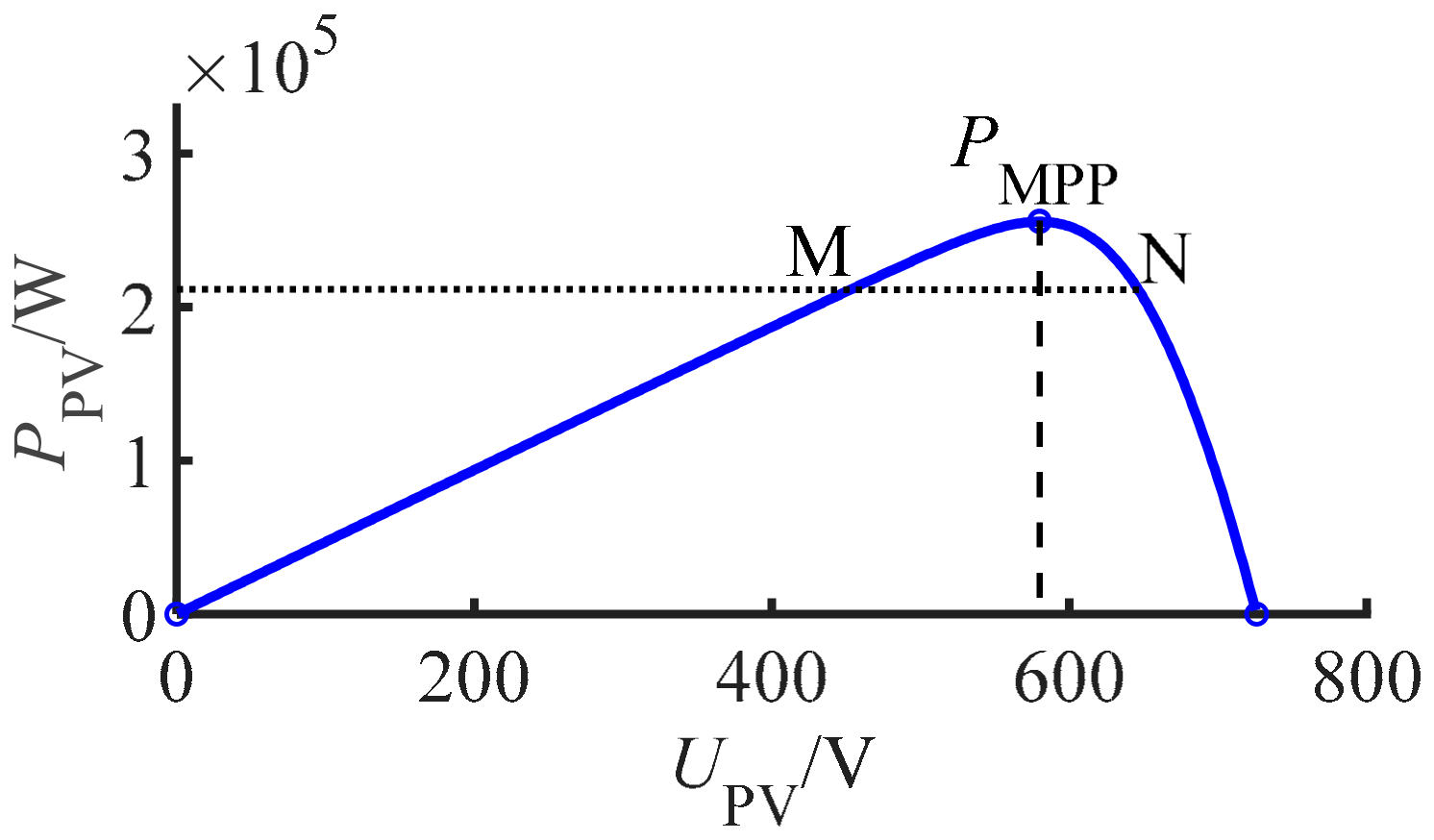
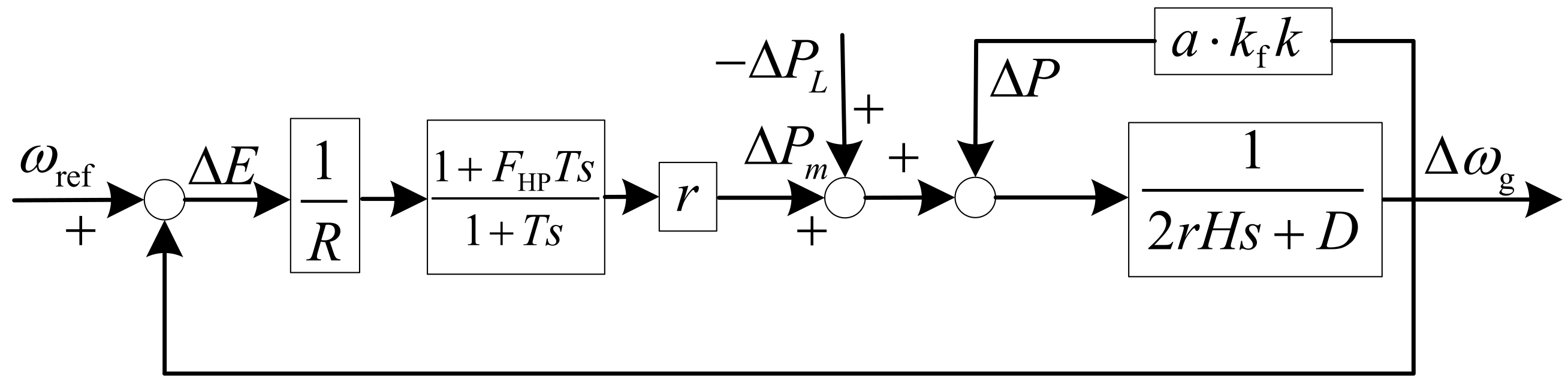
4. Analysis of Frequency Regulation Control Strategy for PV and Its Mechanism
4.1. FR Control to the Left for the MPP
4.2. FR Control to the Right for the MPP
5. PV Power Prediction Algorithm
5.1. Selection of Datasets and Correlation Coefficients
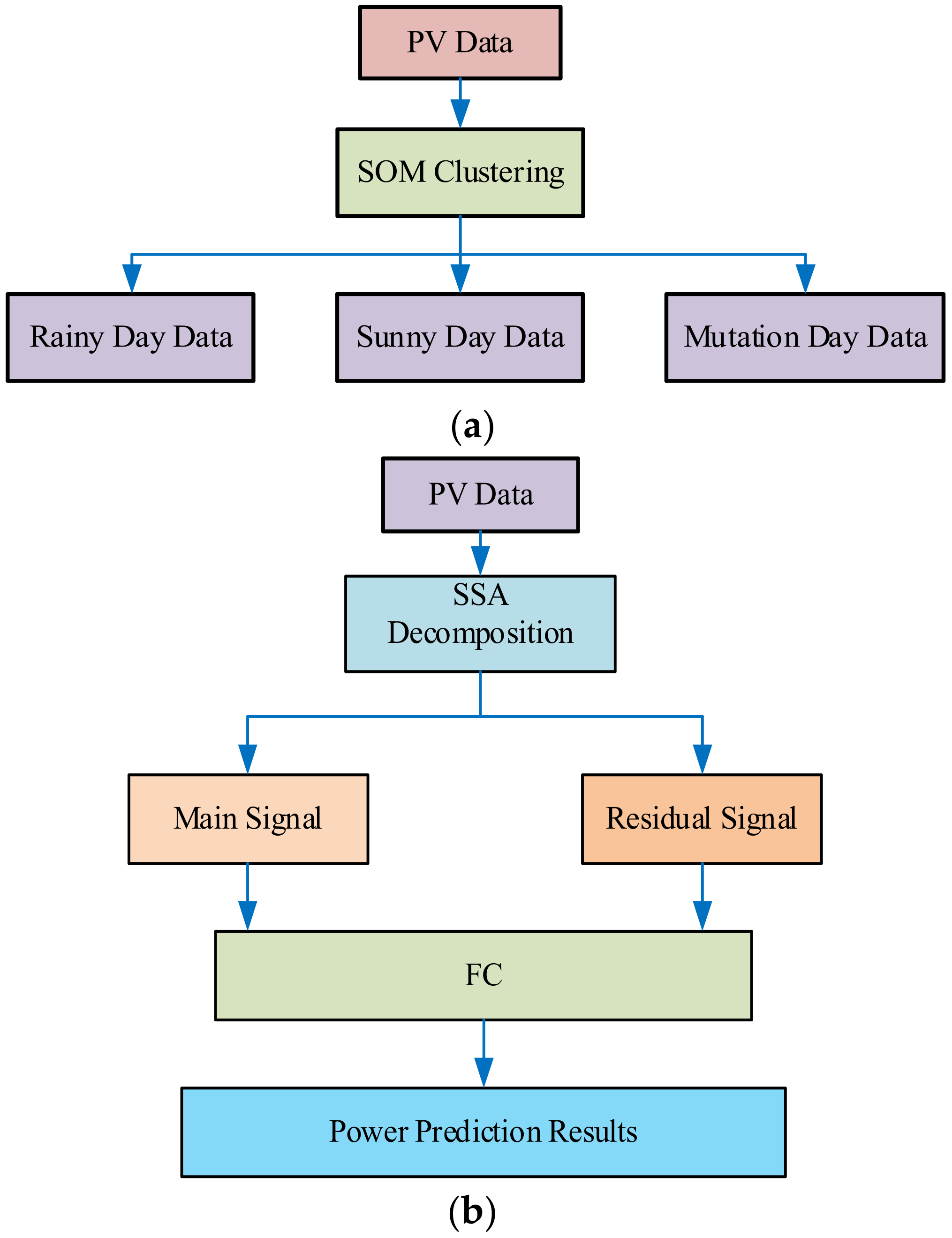
5.2. SOM Clustering Algorithm
5.3. Quadratic Decomposition
5.4. Power Prediction Algorithm Framework
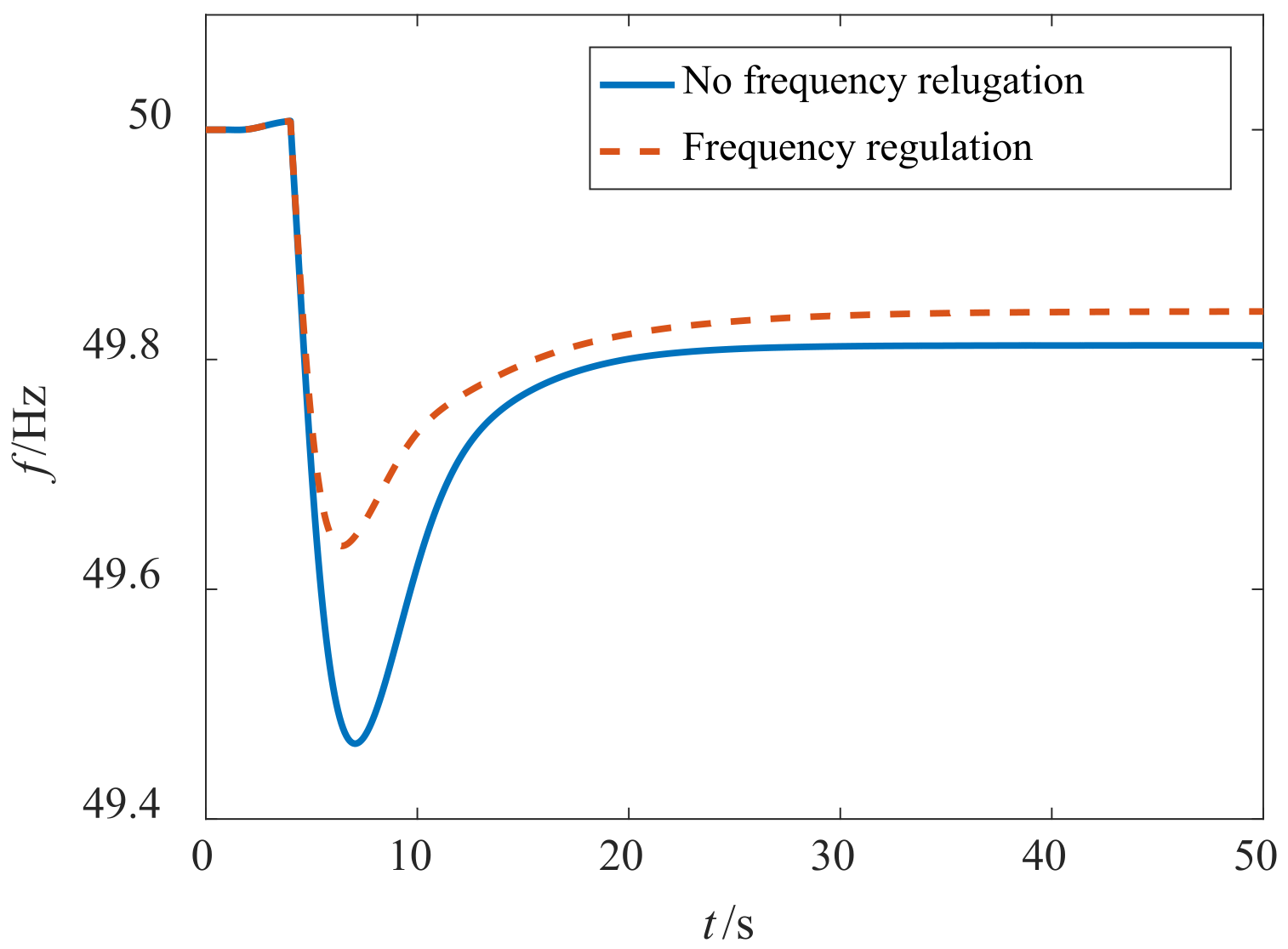
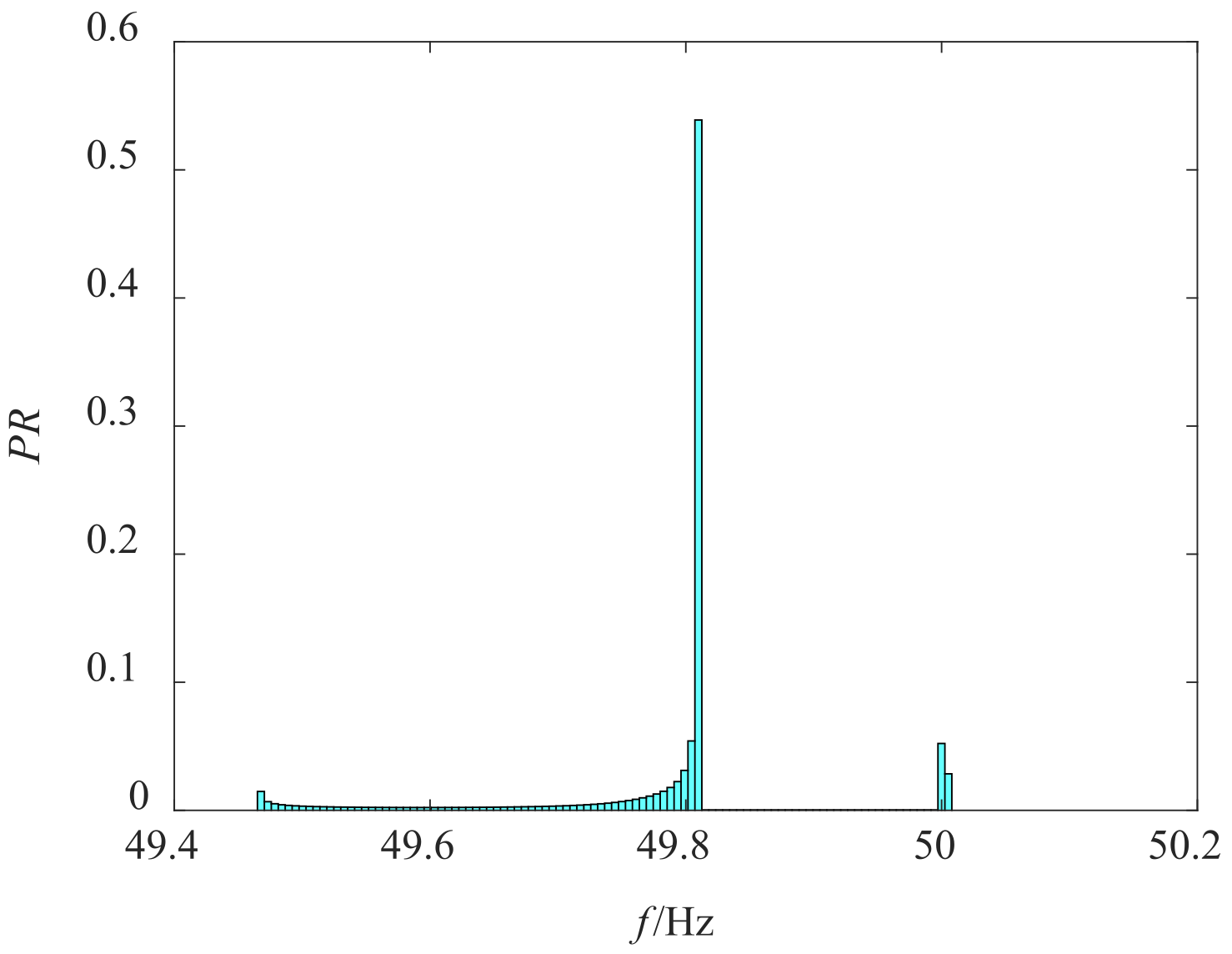
6. Simulation Example Validation
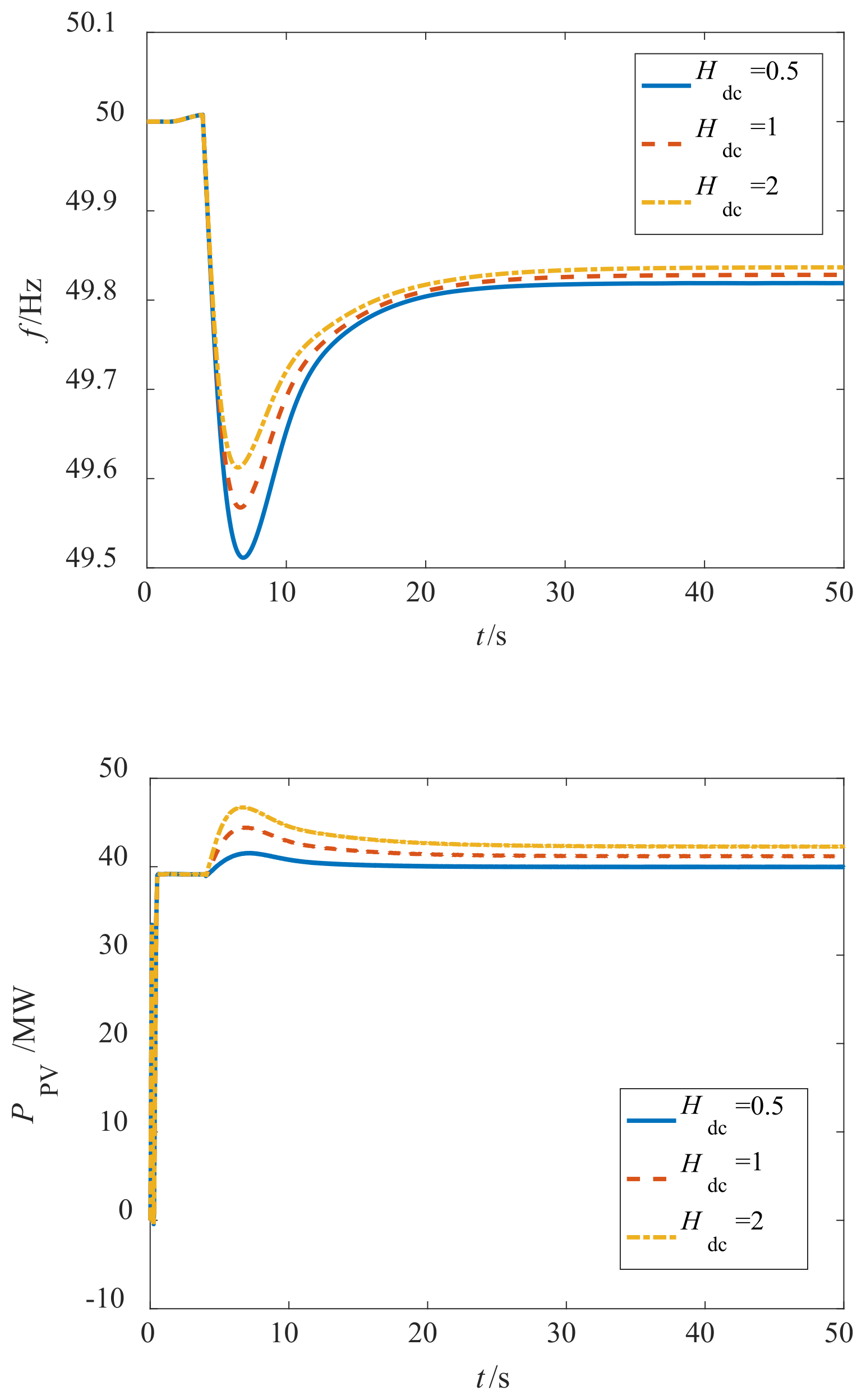
6.1. Analysis of the Inertial Response of a System with Different Control Parameters
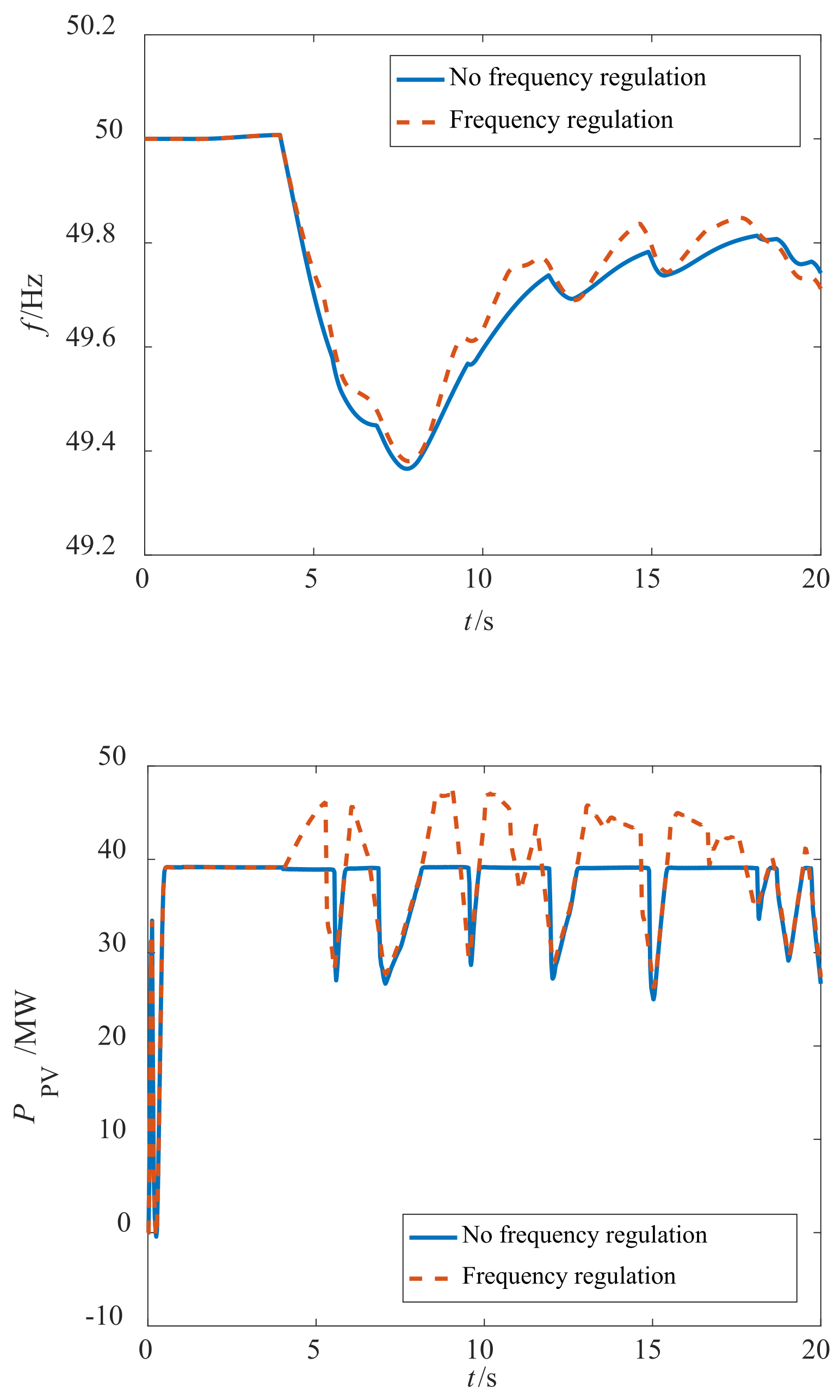
6.2. Analysis of the Inertial Response of the System during Fluctuations in Light Intensity
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oufettoul, H.; Lamdihine, N.; Motahhir, S.; Lamrini, N.; Abdelmoula, I.A.; Aniba, G. Comparative performance analysis of PV module positions in a solar PV array under partial shading conditions. IEEE Access 2023, 11, 12176–12194. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Si, J.; Xu, S. Distributed event-triggered hierarchical control of PV inverters to provide multi-time scale frequency response for AC microgrid. IEEE Trans. Power Syst. 2023, 38, 1529–1542. [Google Scholar] [CrossRef]
- Taminiau, J.; Byrne, J.; Kim, J.; Kim, M.; Seo, J.; Korea, S. Infrastructure-Scale Sustainable Energy Planning in the Cityscape: Transforming Urban Energy Metabolism in East Asia. Wiley Interdiscip. Rev. Energy Environ. 2021, 10, e397. [Google Scholar] [CrossRef]
- Dozein, M.G.; Chaspierre, G.; Mancarella, P.; Panciatici, P.; Van Cutsem, T. Frequency response from solar PV: A dynamic equivalence closed-loop system identification approach. IEEE Syst. J. 2022, 16, 713–722. [Google Scholar] [CrossRef]
- Baškarad, T.; Holjevac, N.; Kuzle, I. Photovoltaic system control for power system frequency support in case of cascading events. IEEE Trans. Sustain. Energy 2023, 14, 1324–1334. [Google Scholar] [CrossRef]
- D’silva, S.; Shadmand, M.; Bayhan, S.; Abu-Rub, H. Towards grid of microgrids: Seamless transition between grid-connected and islanded modes of operation. IEEE Open J. Ind. Electron. Soc. 2020, 1, 66–81. [Google Scholar] [CrossRef]
- Zhao, X.; Xue, Y.; Zhang, X.-P. Fast frequency support from wind turbine systems by arresting frequency nadir close to settling frequency. IEEE Open Access J. Power Energy 2020, 7, 191–202. [Google Scholar] [CrossRef]
- Li, Q.; Baran, M.E. A novel frequency support control method for PV plants using tracking LQR. IEEE Trans. Sustain. Energy 2020, 11, 2263–2273. [Google Scholar] [CrossRef]
- Mohammadi, K.; Azizi, E.; Choi, J.; Hamidi-Beheshti, M.-T.; Bidram, A.; Bolouki, S. Asynchronous periodic distributed event-triggered voltage and frequency control of microgrids. IEEE Trans. Power Syst. 2021, 36, 4524–4538. [Google Scholar] [CrossRef]
- Khazaei, J.; Tu, Z.; Liu, W. Small-signal modeling and analysis of virtual inertia-based PV systems. IEEE Trans. Energy Convers. 2020, 35, 1129–1138. [Google Scholar] [CrossRef]
- Wang, L.; Sun, P.; Han, K.; Xu, C.; Jiang, H. Research on equal proportion load shedding frequency modulation control technology of photovoltaic power generation system considering reserve capacity. Renew. Energy Resour. 2020, 38, 1203–1209. [Google Scholar]
- Xiong, L.; Liu, X.; Zhang, D.; Liu, Y. Rapid power compensation-based frequency response strategy for low-inertia power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4500–4513. [Google Scholar] [CrossRef]
- Zhong, C.; Zhou, Y.; Yan, G. Power reserve control with real-time iterative estimation for PV system participation in frequency regulation. Int. J. Electr. Power Energy Syst. 2021, 124, 106367. [Google Scholar] [CrossRef]
- Zhong, C.; Zhou, Y.; Zhang, X.P.; Yan, G. Flexible power-point-tracking-based frequency regulation strategy for PV system. IET Renew. Power Gener. 2020, 14, 1797–1807. [Google Scholar] [CrossRef]
- Kong, H.; Li, P.; Huang, W.; Xu, A. Research on frequency modulation strategy of photovoltaic grid-connected system based on distributed energy storage. Power Electron. 2020, 54, 80–83, 96. [Google Scholar]
- Yang, P.; Chen, Z.; Luo, T.; ZHU, J.; Liu, B.; Chen, X. Control method of photovoltaic power generation and hybrid energy storage based on VSG. Power Syst. Clean Energy 2023, 39, 83–91. [Google Scholar]
- Zhang, J.; Pan, Q. Power quality control of microgrid based on virtual synchronous generator. Power Electron. 2023, 57, 92–94, 116. [Google Scholar]
- Hu, M.; He, Y.; Yang, H.; Du, J. VSG variable inertia damping cooperative control strategy based on frequency deviation. J. Anhui Univ. 2023, 47, 39–46. [Google Scholar]
- Feldmann, D.; Oliveira, R.V.D. Operational and control approach for PV power plants to provide inertial response and primary frequency control support to power system black-start. Int. J. Electr. Power Energy Syst. 2020, 127, 106645. [Google Scholar] [CrossRef]
- Rehman, H.U.; Yan, X.; Abdelbaky, M.A.; Jan, M.U.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Wu, C.; Blaabjerg, F. Characteristics of parallel inverters applying virtual synchronous generator control. IEEE Trans. Smart Grid 2021, 12, 4690–4701. [Google Scholar] [CrossRef]
- Khalid, A.; Stevenson, A.; Sarwat, A.I. Overview of technical specifications for grid-connected microgrid battery energy storage systems. IEEE Access 2021, 9, 163554–163593. [Google Scholar] [CrossRef]
- Srinivas, V.L.; Singh, B.; Mishra, S. Fault ride-through strategy for two-stage grid-connected photovoltaic system enabling load compensation capabilities. IEEE Trans. Ind. Electron. 2019, 66, 8913–8924. [Google Scholar] [CrossRef]
- Qi, J.; Yan, G.; Li, Y.; Cai, Y.; Zhang, H. Stability analysis of multiple paralleled photovoltaic power generation units connected to weak AC system. Autom. Electr. Power Syst. 2018, 42, 14–20. [Google Scholar]
- Nwaneto, U.C.; Knight, A.M. Full-order and simplified dynamic phasor models of a single-phase two-stage grid-connected PV system. IEEE Access 2023, 11, 26712–26728. [Google Scholar] [CrossRef]
- Qin, X.; Su, L.; Chi, Y.; Guo, Q.; Xu, X. Functional orientation discrimination of inertia support and primary frequency regulation of virtual synchronous generation in large power grid. Autom. Electr. Power Syst. 2018, 42, 36–43. [Google Scholar]
- Yang, H.; Jia, Q.; Xiang, L.; Yan, G.; Zhang, S.; Li, X. Virtual inertia control strategy for two-stage photovoltaics. Autom. Electr. Power Syst. 2019, 43, 87–94. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhu, H.; Zhang, S. Two-Stage Grid-Connected Frequency Regulation Control Strategy Based on Photovoltaic Power Prediction. Sustainability 2023, 15, 8929. https://doi.org/10.3390/su15118929
Wang S, Zhu H, Zhang S. Two-Stage Grid-Connected Frequency Regulation Control Strategy Based on Photovoltaic Power Prediction. Sustainability. 2023; 15(11):8929. https://doi.org/10.3390/su15118929
Chicago/Turabian StyleWang, Shuzheng, Haiming Zhu, and Shaowen Zhang. 2023. "Two-Stage Grid-Connected Frequency Regulation Control Strategy Based on Photovoltaic Power Prediction" Sustainability 15, no. 11: 8929. https://doi.org/10.3390/su15118929
APA StyleWang, S., Zhu, H., & Zhang, S. (2023). Two-Stage Grid-Connected Frequency Regulation Control Strategy Based on Photovoltaic Power Prediction. Sustainability, 15(11), 8929. https://doi.org/10.3390/su15118929